carlocomin.files.wordpress.com · complexity in infinite games on graphs and temporal constraint...
TRANSCRIPT

Complexity in Infinite Games on Graphsand Temporal Constraint Networks
Carlo CominAdvisor: Prof. Romeo Rizzi (University of Verona, Italy)
Co-Advisor: D.d.R. Stéphane Vialette (LIGM UPEM, CNRS, France)
Referee: Prof. Luke Hunsberger (Vassar College, NY, US)Referee: Prof. Angelo Montanari (University of Udine, Italy)
University of Trento jointly University of Veronain co-tutélle with
Université Paris-Est in Marne-la-Vallée
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 1/89

Chapter 1Introduction and Context
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 2/89

Introduction and Context1 Temporal Constraint Networks (Temporal Planning and Scheduling) [Dechter, 1991]
2 Infinite Games on Finite Graphs (Games for Formal Verification) [Grädel, 2002]
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 3/89
Introduction and Context1 This dissertation provides further evidence that game theoretic arguments
help to study algorithmic problems in the area of automated temporalplanning and formal verification of finite state non-terminating systems.
I Automated temporal planning is a branch of Artificial Intelligence (AI) thatconcerns the realization of temporal strategies or temporal actionsequences, typically for execution by intelligent agents, autonomous robotsand unmanned vehicles.
I Non-terminating computing systems abound in environments as varied ashousehold appliances, medical equipment, industrial control systems, flightcontrol systems in airplanes, etc. Failures caused by design faults may bevery costly and they should be avoided as much as possible. Behaviour ofsuch systems is typically very complex which makes their design andvalidation a challenge. Formal methods try to address this challenge bydeveloping formal models of such systems, and methods to specify andreason about their properties.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 4/89

Introduction and ContextWe began our research by studying algorithmic problems in automatedtemporal planning, particularly, conditional temporal planning.At some point, we have identified interesting connections between thealgorithmics of these problems and that of a specific family of infinite2-player pebble games played on finite graphs.
I i.e. Energy (EGs) and Mean-Payoff Games (MPGs).I MPGs are intimately related to Parity Games and the semantics of the
modal µ-calculus, a well-known logic for formal verification.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 5/89
In summary...Algorithmic Game Theory (especially, infinite two-player pebble gamesplayed on finite graphs) is the red thread that makes it possible to look atthe various contributions of this dissertation in a sufficiently coherent way.
I A game theoretic formulation helps to abstract away from syntactic andsemantic peculiarities of modelling formalisms and makes the conditionaltemporal constraints problems in question more easily amenable toalgorithmic and complexity analysis.
I On the other side, this have led us to deepen the study of algorithmic andcomplexity issues in infinite games on finite graphs per se. Ultimately, weobtained faster algorithms and improved complexity bounds for some ofthese games, i.e., Update Games, Explicit McNaughton-Müller Games,and finally, for Mean Payoff Games.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 6/89

Summary of Results (I)
Temporal Constraint Networks (Temporal Planning and Scheduling) [Dechter, 1991]
1 Hyper Temporal Networks (A Tractable Generalization of Simple Temporal Networksand its relation to Mean Payoff Games)
I 21st International Symposium on Temporal Representation and Reasoning(TIME2014), Verona, Italy, 2014
I Constraints, an International Journal, Springer-US, 20162 Singly-Exponential Time DC-Checking of Conditional Simple Temporal
Networks via Mean Payoff GamesI 22st International Symposium on Temporal Representation and Reasoning
(TIME2015), Kassel, Germany, 2015I Information and Computation, Elsevier, Special Issue of TIME2015
3 Instantaneous Reaction-Time in DC-Checking of Conditional SimpleTemporal Networks
I 23st International Symposium on Temporal Representation and Reasoning(TIME2016), Copenhagen, Denmark, 2016
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 7/89

Summary of Results (II)
Infinite Games on Finite Graphs (Games for Formal Verification) [Grädel, 2002]
Parity Games, Mean Payoff Games, Energy Games, Update Games, Müller-McNaughton, ...
1 Linear-Time Algorithm for Update Games viaStrongly-Trap-Connected-ComponentsI Submitted.
2 An Improved Upper Bound on the Time Complexity of the Value Problemand Optimal Strategy Synthesis in Mean Payoff Games
I Strategic Reasoning 2015 (SR2015), Oxford, U.K.I Algorithmica, Springer-US, 2016
3 Faster O(|V |2|E|W )-Time Energy Algorithms and Energy-LatticeDecomposition for Optimal Strategy Synthesis in Mean Payoff Games
I Submitted.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 8/89
Summary of Results (III)
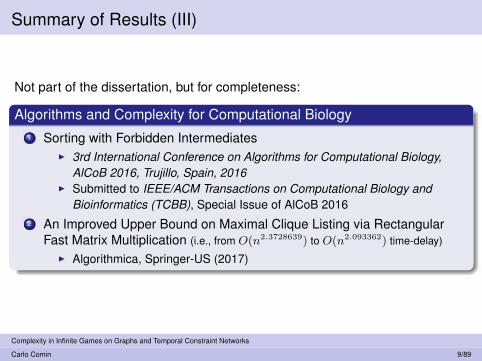
Not part of the dissertation, but for completeness:
Algorithms and Complexity for Computational Biology1 Sorting with Forbidden Intermediates
I 3rd International Conference on Algorithms for Computational Biology,AlCoB 2016, Trujillo, Spain, 2016
I Submitted to IEEE/ACM Transactions on Computational Biology andBioinformatics (TCBB), Special Issue of AlCoB 2016
2 An Improved Upper Bound on Maximal Clique Listing via RectangularFast Matrix Multiplication (i.e., from O(n2.3728639) to O(n2.093362) time-delay)
I Algorithmica, Springer-US (2017)
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 9/89

Chapter 2Hyper Temporal Networks
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 10/89

Simple Temporal Problems
Simple Temporal Networks (STNs) [Dechter, Meiri, Pearl, 1991]Represent a general framework for analyzing systems (conjunctions) ofdifference constraints on ordered pairs of temporal variables.An STN can be encoded by a weighted directed graph:
I a node represents a time-point variable (time-point);I an arc represents a temporal distance constraint:
F ua→ v stands for v − u ≤ a, a ∈ R;
F (v −a→ u stands for v − u ≥ a).
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56 ≤ B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 3
11
−14 −13
7
−6 −4
5
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 11/89
Consistency of Simple Temporal Problems
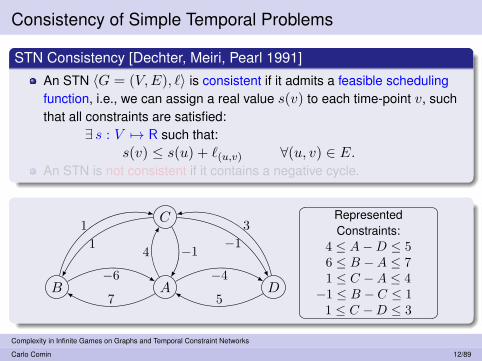
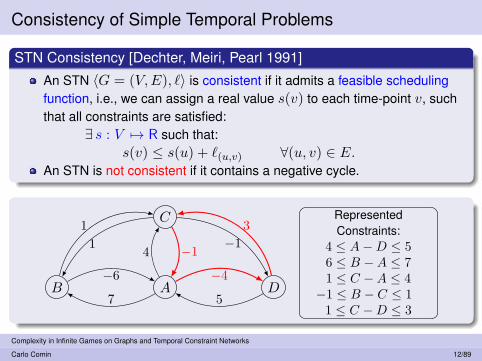
STN Consistency [Dechter, Meiri, Pearl 1991]
An STN 〈G = (V,E), `〉 is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃ s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56 ≤ B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 3
11
−14 −1
7 5
−6 −4
3
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 12/89
Consistency of Simple Temporal Problems
STN Consistency [Dechter, Meiri, Pearl 1991]
An STN 〈G = (V,E), `〉 is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃ s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56 ≤ B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 3
11
−14 −1
7 5
−6 −4
3
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 12/89

Introduction - STNsSTN Consistency
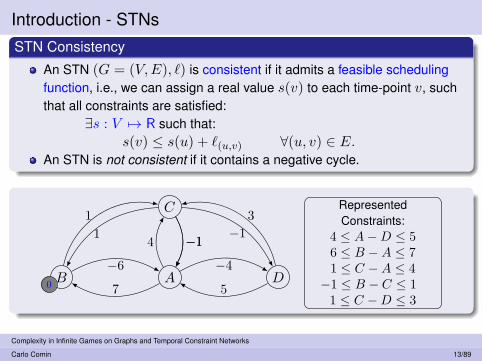
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56 ≤ B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 3
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89
Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56 ≤ B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 30
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89

Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56 ≤ B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 30
≤ −6
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89

Introduction - STNsSTN Consistency
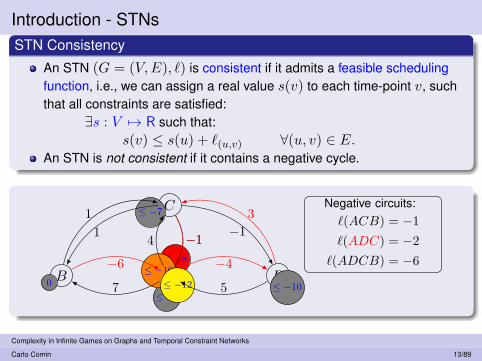
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4 ≤ A−D ≤ 56≤B −A ≤ 71 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 30
≤ −6≤ −10
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89

Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
4≤A−D ≤ 51 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D ≤ 30≤ −6
≤ −10
≤ −7
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89

Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
RepresentedConstraints:
1 ≤ C −A ≤ 4−1 ≤ B − C ≤ 1
1 ≤ C −D≤30
≤ −6≤ −10
≤ −7
≤ −8
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89

Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
Negative circuits:`(ACB) = −1`(ADC) = −2
`(ADCB) = −60
≤ −6≤ −10
≤ −7
≤ −8
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89

Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
Negative circuits:`(ACB) = −1`(ADC) = −2
`(ADCB) = −60
≤ −6≤ −10
≤ −7
≤ −8≤ −10
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89
Introduction - STNsSTN Consistency
An STN (G = (V,E), `) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value s(v) to each time-point v, suchthat all constraints are satisfied:
∃s : V 7→ R such that:s(v) ≤ s(u) + `(u,v) ∀(u, v) ∈ E.
An STN is not consistent if it contains a negative cycle.
C
AB D
Negative circuits:`(ACB) = −1`(ADC) = −2
`(ADCB) = −60
≤ −6≤ −10
≤ −7
≤ −8≤ −10≤ −12
11
−14 −1
7 5
−6 −4
3
−1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 13/89
HyTNs: an extension of STNs
A more general arc constraint
v1
v2
v3
tA
A,w1
A,w2A,w3
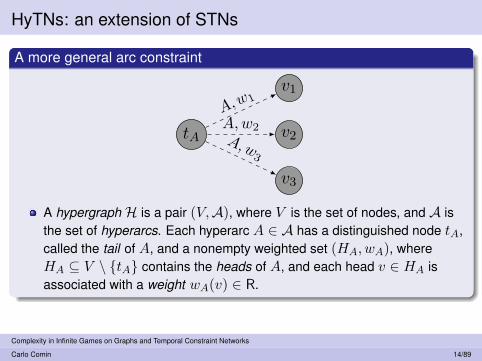
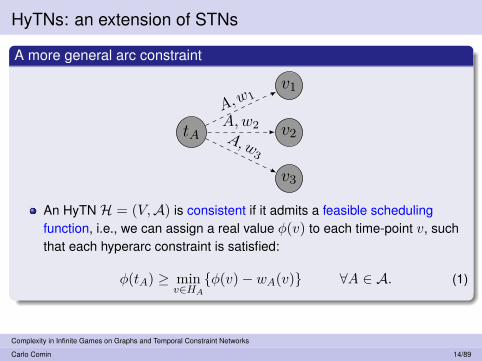
A hypergraph H is a pair (V,A), where V is the set of nodes, and A isthe set of hyperarcs. Each hyperarc A ∈ A has a distinguished node tA,called the tail of A, and a nonempty weighted set (HA, wA), whereHA ⊆ V \ tA contains the heads of A, and each head v ∈ HA isassociated with a weight wA(v) ∈ R.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 14/89
HyTNs: an extension of STNs
A more general arc constraint
v1
v2
v3
tA
A,w1
A,w2A,w3
An HyTNH = (V,A) is consistent if it admits a feasible schedulingfunction, i.e., we can assign a real value φ(v) to each time-point v, suchthat each hyperarc constraint is satisfied:
φ(tA) ≥ minv∈HA
φ(v)− wA(v) ∀A ∈ A. (1)
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 14/89

HyTNs: an extension of STNs
Milestone events and joins
v1
v2
v3
hA
A,0
A, 0
A, 0
0
0
0
We may consider multi-tail hyperarcs as well multi-head ones.This allows to introduce, in any HyTN model, an event bound to occurprecisely when the last/first event of an associated set of events occurs.This allows to represent AND/OR join connectors from workflows.These could not be done before.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 15/89

Our findings on the two versions of HyTNs in a nutshell
A complexity map, algorithms, and characterizationsIf we allow both multi-tails arcs and multi-heads arcs theConsistency-Checking problem becomes NP-complete.
The multi-tails and the multi-heads versions of HyTNs are inter-reducible.(Direct reduction by reversing all arcs and inverting the time axis).
If we allow either only multi-tails arcs or only multi-heads arcs theConsistency problem can be efficiently solved in pseudo-polynomial time.
Both of these problems can be reduced to the Determinacy problem forEnergy and Mean Payoff Games.
In fact, both of these problems are equivalent to the Determinacy problemfor Mean Payoff Games.
HyTN’s Consistency-Checking is well characterized: we have introduceda notion of negative hyper-circuit as NO-certificate.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 16/89

Our findings on the two versions of HyTNs in a nutshell
A complexity map, algorithms, and characterizationsIf we allow both multi-tails arcs and multi-heads arcs theConsistency-Checking problem becomes NP-complete.
The multi-tails and the multi-heads versions of HyTNs are inter-reducible.(Direct reduction by reversing all arcs and inverting the time axis).
If we allow either only multi-tails arcs or only multi-heads arcs theConsistency problem can be efficiently solved in pseudo-polynomial time.
Both of these problems can be reduced to the Determinacy problem forEnergy and Mean Payoff Games.
In fact, both of these problems are equivalent to the Determinacy problemfor Mean Payoff Games.
HyTN’s Consistency-Checking is well characterized: we have introduceda notion of negative hyper-circuit as NO-certificate.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 16/89

Our findings on the two versions of HyTNs in a nutshell
A complexity map, algorithms, and characterizationsIf we allow both multi-tails arcs and multi-heads arcs theConsistency-Checking problem becomes NP-complete.
The multi-tails and the multi-heads versions of HyTNs are inter-reducible.(Direct reduction by reversing all arcs and inverting the time axis).
If we allow either only multi-tails arcs or only multi-heads arcs theConsistency problem can be efficiently solved in pseudo-polynomial time.
Both of these problems can be reduced to the Determinacy problem forEnergy and Mean Payoff Games.
In fact, both of these problems are equivalent to the Determinacy problemfor Mean Payoff Games.
HyTN’s Consistency-Checking is well characterized: we have introduceda notion of negative hyper-circuit as NO-certificate.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 16/89

Our findings on the two versions of HyTNs in a nutshell
A complexity map, algorithms, and characterizationsIf we allow both multi-tails arcs and multi-heads arcs theConsistency-Checking problem becomes NP-complete.
The multi-tails and the multi-heads versions of HyTNs are inter-reducible.(Direct reduction by reversing all arcs and inverting the time axis).
If we allow either only multi-tails arcs or only multi-heads arcs theConsistency problem can be efficiently solved in pseudo-polynomial time.
Both of these problems can be reduced to the Determinacy problem forEnergy and Mean Payoff Games.
In fact, both of these problems are equivalent to the Determinacy problemfor Mean Payoff Games.
HyTN’s Consistency-Checking is well characterized: we have introduceda notion of negative hyper-circuit as NO-certificate.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 16/89
Our findings on the two versions of HyTNs in a nutshell
A complexity map, algorithms, and characterizationsIf we allow both multi-tails arcs and multi-heads arcs theConsistency-Checking problem becomes NP-complete.
The multi-tails and the multi-heads versions of HyTNs are inter-reducible.(Direct reduction by reversing all arcs and inverting the time axis).
If we allow either only multi-tails arcs or only multi-heads arcs theConsistency problem can be efficiently solved in pseudo-polynomial time.
Both of these problems can be reduced to the Determinacy problem forEnergy and Mean Payoff Games.
In fact, both of these problems are equivalent to the Determinacy problemfor Mean Payoff Games.
HyTN’s Consistency-Checking is well characterized: we have introduceda notion of negative hyper-circuit as NO-certificate.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 16/89

Our findings on the two versions of HyTNs in a nutshell
A complexity map, algorithms, and characterizationsIf we allow both multi-tails arcs and multi-heads arcs theConsistency-Checking problem becomes NP-complete.
The multi-tails and the multi-heads versions of HyTNs are inter-reducible.(Direct reduction by reversing all arcs and inverting the time axis).
If we allow either only multi-tails arcs or only multi-heads arcs theConsistency problem can be efficiently solved in pseudo-polynomial time.
Both of these problems can be reduced to the Determinacy problem forEnergy and Mean Payoff Games.
In fact, both of these problems are equivalent to the Determinacy problemfor Mean Payoff Games.
HyTN’s Consistency-Checking is well characterized: we have introduceda notion of negative hyper-circuit as NO-certificate.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 16/89

Negative Cycles Certificates
Given a multi-head HyTNH = (V,A), a cycle is a pair (S, C) with S ⊆ V andC ⊆ A such that:
1 S =⋃A∈C(HA ∪ tA) and S 6= ∅;
2 ∀v ∈ S there exists an unique A ∈ C such that tA = v.
v1
v2
v3
v0
v4v5
v6
A0,wA
0(v1)
A0, wA0(v2)A
0 , wA
0 (v3 )
A1 , w
A1 (v4 ) A1,
wA1(v5)
A2,w A
2(v 5
)
A2 , w
A2 (v6 )
A4,wA
4(v
0)
A4, wA4(v5)
A6 ,w
A6 (v
5 )
A6, wA6(v3)
A3, wA3(v6)
A3 , w
A3 (v0 )
A5,w A
5(v 2
) A5 ,w
A5 (v
6 )
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 17/89
Extensions of HyTNs: NP-Completeness proofs
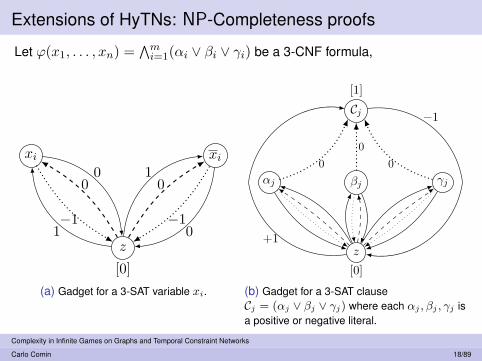
Let ϕ(x1, . . . , xn) =∧mi=1(αi ∨ βi ∨ γi) be a 3-CNF formula,
z
[0]
xixi
1
00
−1
1
0
0
−1
(a) Gadget for a 3-SAT variable xi.
Cj
[1]
βjαj γj
z
[0]
+1
−1
00
0
(b) Gadget for a 3-SAT clauseCj = (αj ∨ βj ∨ γj) where each αj , βj , γj isa positive or negative literal.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 18/89

The local replacement reduction
h1
h2
h3
tA
A,w1
A,w2A,w
3
h1
h2
h3
AtA
w1
w2
w3
0
How an hyperarc (multi-head) gets replaced:
If H = (V,A) then GH = (V0 ∪ V1, E), where:
V1 = V ;
V0 = A;
E = (tA, A, 0) | A ∈ A ∪ (A, h,wA(h)) | A ∈ A, h ∈ HA.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 19/89
Mean Payoff Games: the model
A B
CD
−1
−2
+1
+2 −1 −9
−1
+1
+2
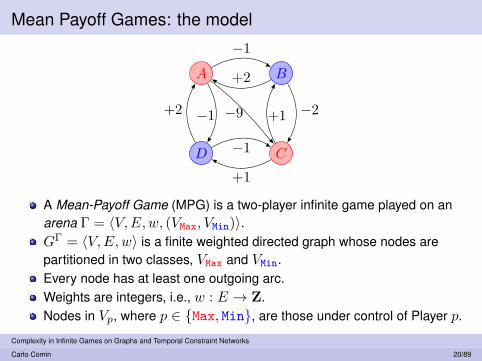
A Mean-Payoff Game (MPG) is a two-player infinite game played on anarena Γ = 〈V,E,w, (VMax, VMin)〉.GΓ = 〈V,E,w〉 is a finite weighted directed graph whose nodes arepartitioned in two classes, VMax and VMin.Every node has at least one outgoing arc.Weights are integers, i.e., w : E → Z.Nodes in Vp, where p ∈ Max, Min, are those under control of Player p.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 20/89

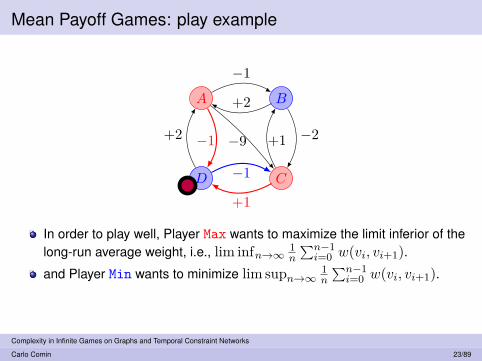
Mean Payoff Games: play example
A B
CD
−1
−9 −2
+1
+2 −1
−1
+1
+2
Each match starts with a pebble placed at some node v ∈ VMax ∪ VMin.
Here v = A ∈ VMax, the nodes controlled by Player Max.
Player Max chooses an arc e ∈ E exiting v and moves the pebble along e.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 21/89

Mean Payoff Games: play example
A B
CD
start −1
−2
+1
+2 −1
−1
+1
+2
−9
A B
CD
−1
−2
+1
+2 −1
−1
+1
+2
−9
A B
CD
−1
−2
+1
+2 −1
−1
+1
+2
−9
A B
CD
−1
−2
+1
+2 −1
−1
+1
+2
−9
The two players move the pebble ad infinitum along the arcs...
The infinite sequence of encountered nodes, i.e.,π = v0v1 · · · vn · · · = ADC(DC)∗ is a play.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 22/89
Mean Payoff Games: play example
A B
CD
−1
−9 −2
+1
+2 −1
−1
+1
+2
In order to play well, Player Max wants to maximize the limit inferior of thelong-run average weight, i.e., lim infn→∞ 1
n
∑n−1i=0 w(vi, vi+1).
and Player Min wants to minimize lim supn→∞ 1n
∑n−1i=0 w(vi, vi+1).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 23/89

Mean Payoff Games: play example
EC
B
A
D
F G0
0
0
0
+3+3
−5−5
−5
+3
Formally, the Player 0’s payoff of a play v0v1 . . . vn . . . in Γ is:
MP0(v0v1 . . . vn . . .) := lim infn→∞
1n
n−1∑i=0
w(vi, vi+1).
The value secured by a strategy σ0 ∈ Σ0 in a vertex v is:
valσ0(v) := infσ1∈Σ1
MP0(outcomeΓ(v, σ0, σ1)
),
The (optimal) value of a vertex v ∈ V in the MPG Γ turns out to be:
valΓ(v) = supσ0∈Σ0
valσ0(v) = infσ1∈Σ1
valσ1(v).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 24/89
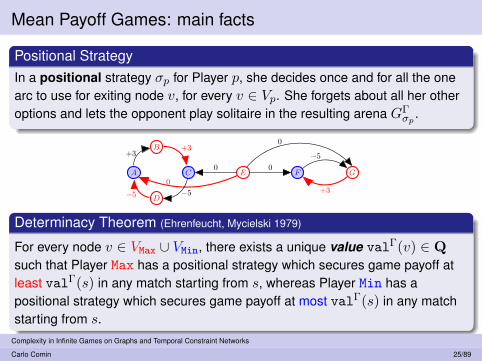
Mean Payoff Games: main facts
Positional StrategyIn a positional strategy σp for Player p, she decides once and for all the onearc to use for exiting node v, for every v ∈ Vp. She forgets about all her otheroptions and lets the opponent play solitaire in the resulting arena GΓ
σp .
EC
B
A
D
F G0
0
0
0
+3+3
−5−5
−5
+3
Determinacy Theorem (Ehrenfeucht, Mycielski 1979)
For every node v ∈ VMax ∪ VMin, there exists a unique value valΓ(v) ∈ Qsuch that Player Max has a positional strategy which secures game payoff atleast valΓ(s) in any match starting from s, whereas Player Min has apositional strategy which secures game payoff at most valΓ(s) in any matchstarting from s.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 25/89

Mean Payoff Games: main facts
MPG ProblemsThe DECISION problem asks, given a node v ∈ V , to decide whether or notvalΓ(v) ≥ 0. The setsWMax = v ∈ V | valΓ(v) ≥ 0 andWMin = V \WMax arecalled Winning Regions.
I The DECISION problem lies in NP ∩ coNP (Zwick, Paterson 1996).It is recognizable with Unambiguous Polynomial-Time Non-DeterministicTuring Machines (Jurdzinski 1998), i.e., it is in UP ∩ coUP.
The VALUE problem asks to compute the values of all nodes.
The STRATEGY SYNTHESIS problem asks to compute, for each player, a positionalstrategy securing her payoffs corresponding to the values of the starting node.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 26/89
Mean Payoff Games: main facts
Pseudopolynomial-time algorithms for MPGs:
In 1996, Zwick and Paterson gave a O(|V |3|E|W ) time algorithm for the ValueProblem and a O(|V |4|E|W log(|E|/|V |)) time algorithm for OptimalStrategy Synthesis.
In 2011, Brim, Raskin, et al. gave a O(|V |2|E|W log(|V |W )) time algorithmboth for the Optimal Strategy Synthesis and for the Value Problem.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 27/89
Energy Games: the model
In EGs, given an initial credit c ∈ N and a node v ∈ V , Player Max winsthe game starting from v if she can maintain the sum of the encounteredweights always non-negative, i.e., if it holds on the play vi∞i=0 that:
c+j∑i=0
w(vi, vi+1) ≥ 0, for all j ≥ 0;
otherwise, the winner is Player Min.
The decision problem for EGs asks whether there exists an initial credit c∗
for which Player Max wins from a given starting position node v. Thecorresponding winning regions are also denotedWMax andWMin.
EGs are log-space equivalent to MPGs [Patricia Bouyer (2008)].
EGs can be solved in O(|V ||E|W ) time with the Value-IterationAlgorithm [Brim, Raskin, et. al, 2011]
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 28/89
The Consistency-Checking algorithm
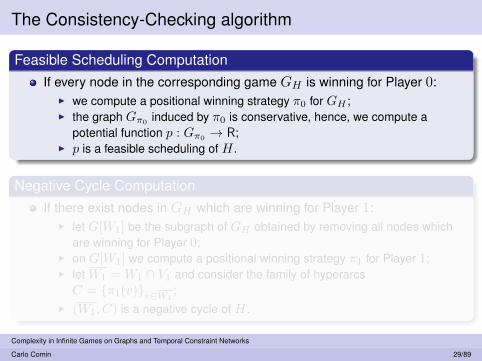
Feasible Scheduling ComputationIf every node in the corresponding game GH is winning for Player 0:
I we compute a positional winning strategy π0 for GH ;I the graph Gπ0 induced by π0 is conservative, hence, we compute a
potential function p : Gπ0 → R;I p is a feasible scheduling of H .
Negative Cycle ComputationIf there exist nodes in GH which are winning for Player 1:
I let G[W1] be the subgraph of GH obtained by removing all nodes whichare winning for Player 0;
I on G[W1] we compute a positional winning strategy π1 for Player 1;I let W1 = W1 ∩ V1 and consider the family of hyperarcsC = π1(v)v∈W1
;I (W1, C) is a negative cycle of H .
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 29/89

The Consistency-Checking algorithm
Feasible Scheduling ComputationIf every node in the corresponding game GH is winning for Player 0:
I we compute a positional winning strategy π0 for GH ;I the graph Gπ0 induced by π0 is conservative, hence, we compute a
potential function p : Gπ0 → R;I p is a feasible scheduling of H .
Negative Cycle ComputationIf there exist nodes in GH which are winning for Player 1:
I let G[W1] be the subgraph of GH obtained by removing all nodes whichare winning for Player 0;
I on G[W1] we compute a positional winning strategy π1 for Player 1;I let W1 = W1 ∩ V1 and consider the family of hyperarcsC = π1(v)v∈W1
;I (W1, C) is a negative cycle of H .
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 29/89

Algorithmics of HyTNs: Upper Bound
Theorem (Comin, Posenato, Rizzi, TIME2014 and Constraints, 2016 )
The following propositions hold on HyTNs.1 There exists an O((|V |+ |A|)mAW ) pseudo-polynomial time algorithm
for checking HyTN-Consistency;2 There exists an O((|V |+ |A|)mAW ) pseudo-polynomial time algorithm
such that, given in input any consistent HyTNH = (V,A), it returns asoutput a feasible scheduling φ : V → R ofH;
Here, W , maxA∈A,v∈HA |wA(v)|.
The approach was shown to be robust by experimental evaluations, e.g. (randomly generated)HyTNs of size up to |V | ∼ 106 and W ∼ 103 were solved.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 30/89
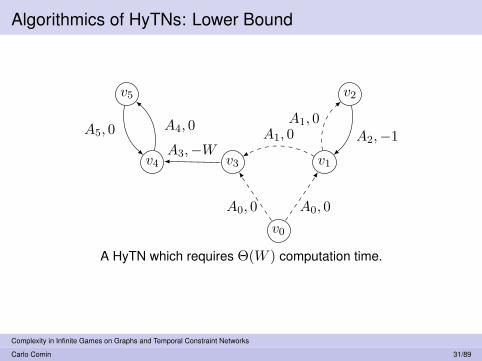
Algorithmics of HyTNs: Lower Bound
v5
v4 v3
v0
v1
v2
A0, 0A0, 0
A1, 0A1, 0 A2,−1
A3,−WA4, 0A5, 0
A HyTN which requires Θ(W ) computation time.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 31/89
Chapter 3Conditional Hyper Temporal Networks and Dynamic Consistency Checking
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 32/89

Conditional Simple Temporal Networks: the Model
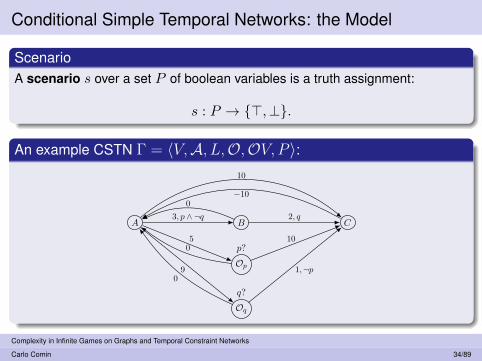
CSTN Γ = 〈V,A, L,O,OV, P 〉 [Tsamardinos, Vidal, Pollack (2003) /Hunsberger, Posenato, Combi (2012)
The CSTN formalism extends STNs in that:1 some of the nodes are called observation events and to each of them is
associated a boolean variable, to be disclosed only at execution time;2 labels (i.e. conjunctions over the literals) are attached to all nodes and
constraints, to indicate the situations in which each of them is required.
A B C
Op
p?Op
p?
Oq
q?Oq
q?
10
−10
3, p ∧ ¬q3, p ∧ ¬q 2, q2, q0
50
90
10
1,¬p1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 33/89
Conditional Simple Temporal Networks: the Model
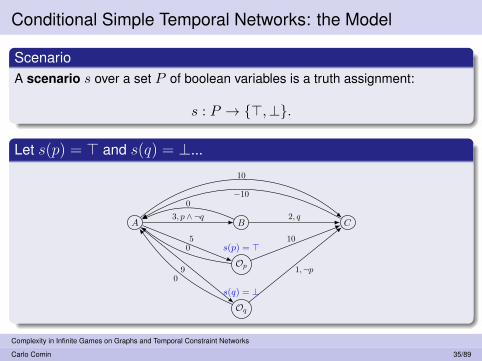
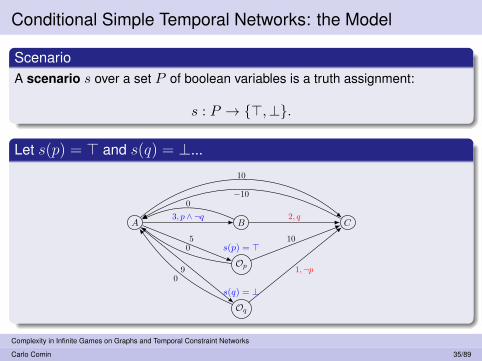
ScenarioA scenario s over a set P of boolean variables is a truth assignment:
s : P → >,⊥.
An example CSTN Γ = 〈V,A, L,O,OV, P 〉:
A B C
Op
p?
Oq
q?
10
−10
3, p ∧ ¬q 2, q0
50
90
10
1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 34/89
Conditional Simple Temporal Networks: the Model
ScenarioA scenario s over a set P of boolean variables is a truth assignment:
s : P → >,⊥.
Let s(p) = > and s(q) = ⊥...
A B C
Op
s(p) = >
Oq
s(q) = ⊥
10
−10
3, p ∧ ¬q 2, q0
50
90
10
1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 35/89
Conditional Simple Temporal Networks: the Model
ScenarioA scenario s over a set P of boolean variables is a truth assignment:
s : P → >,⊥.
Let s(p) = > and s(q) = ⊥...
A B C
Op
s(p) = >
Oq
s(q) = ⊥
10
−10
3, p ∧ ¬q 2, q0
50
90
10
1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 35/89

Conditional Simple Temporal Networks: the Model
ScenarioA scenario s over a set P of boolean variables is a truth assignment:
s : P → >,⊥.
Let s(p) = > and s(q) = ⊥, then Γ becomes:
A B C
Op
Oq
10
−10
30
50
90
10
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 36/89

CSTNs: Consistency
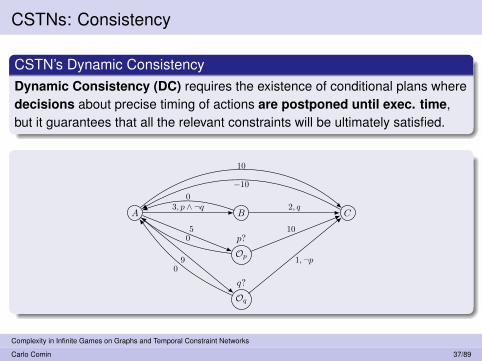
CSTN’s ConsistenciesThree notions of consistency arise for CSTNs: weak, strong, and...
dynamic consistency.
A B C
Op
p?
Oq
q?
10
−10
3, p ∧ ¬q 2, q0
50
90
10
1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 37/89
CSTNs: Consistency
CSTN’s Dynamic ConsistencyDynamic Consistency (DC) requires the existence of conditional plans wheredecisions about precise timing of actions are postponed until exec. time,but it guarantees that all the relevant constraints will be ultimately satisfied.
A B C
Op
p?
Oq
q?
10
−10
3, p ∧ ¬q 2, q0
50
90
10
1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 37/89

CSTNs: Dynamic Consistency
Difference Set ∆(s1; s2)
∆(s1; s2) ,Op ∈ V +
s1 ∩ OV | s1(p) 6= s2(p).
Dynamic Execution StrategyLet σ ∈ SΓ be an execution strategy. Then, σ is dynamic if and only if thefollowing implication holds for every s1, s2 ∈ ΣP , u ∈ V +
s1,s2 :( ∧v∈∆(s1;s2)
[σ(s1)]u ≤ [σ(s1)]v)⇒ [σ(s1)]u = [σ(s2)]u
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 38/89

CSTNs: Dynamic Consistency
Execution StrategyAn Execution Strategy for Γ is a mapping σ : ΣP → ΦV such that, for anyscenario s ∈ ΣP , the domain of the scheduling σ(s) ∈ ΦV is V +
s .
φ(A) = 0
φ(Op) = 1
φ(B) = 8
φ(Oq) = 9
φ(C) = 10
s(q) = >,⊥
φ(Oq) = 2
φ(B) = 3
φ(C) = 10
φ(B) = 8
φ(C) = 10
s(q) = > s(q) = ⊥
s(p) = > s(p) = ⊥
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 39/89

Main Results at TIME2015
Our Contribution:Lower-Bound: coNP-hard.
Upper-Bound: NE ∩ coNE ∩ pseudo-E.
A (pseudo) Singly-Exponential Time DC-Checking for CSTNs.There exists an
O(|ΣP |3|A|2|V |+ |ΣP |4|A||V |2|P |+ |ΣP |5|V |3|P |)W
(pseudo) singly-exponential time algorithm for checking DC on any inputCSTN Γ = 〈V,A,L,O,OV, P 〉.
I Here, W , maxa∈A |wa| and |ΣP | ≤ 2|P |.
In particular, given any dynamically-consistent CSTN Γ, the algorithmreturns a viable and dynamic execution strategy.
(here above, E is deterministic singly-exponential time, NE is nondeterministicsingly-exponential time)Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 40/89

Main Results at TIME2015
Checking DC of CSTNs via MPGsMost importantly, we unveil a connection between the problem of checking DCin CSTNs and that of determining Mean Payoff Games (and Energy Games).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 41/89
Main Results at TIME2015
ε-Dynamic Consistency and the Reaction Time ε(Γ)In order to analyze the algorithm, we introduce a novel and refined notionof dynamic-consistency, named ε-dynamic-consistency;
I Consider ε(Γ) = supε ∈ R>0 | Γ is ε-dynamically-consistent.F ε(Γ) is the reaction time of Γ.
I We provide a sharp lower bounding analysis of the critical value of thereaction time ε(Γ) where the CSTN Γ transits from being, to not being,dynamically-consistent.
I This clarifies the role of the reaction time ε in the DC-checking of CSTNs.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 42/89

Sketch of the reduction from CSTN-Dynamic-Consistency toHyTN-Consistency
Sketch of the reductionIntroduce ε-dynamic-consistency.
Prove that any execution strategy σ is dynamic iff σ is ε-dynamic for somereal number ε ∈ (0,+∞).Consider ε(Γ) = supε ∈ R>0 | Γ is ε-dynamically-consistent.
I ε(Γ) is the reaction time of Γ.
Prove that for any dynamically-consistent CSTN Γ, where V is the set ofevents and ΣP is the set of scenarios, it holds ε(Γ) ≥ |ΣP |−1|V |−1.
Devise an algorithm for checking ε-dynamic-consistency by reducing thatproblem to the consistency checking of HyTNs.Also, we proved that the bound ε(Γ) ≥ |ΣP |−1|V |−1 is optimal.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 43/89

ε-dynamic-consistency, for some small real ε > 0
ε-dynamic-consistency
Given any CSTN 〈V,A,L,O,OV, P 〉 and any real number ε ∈ (0,+∞), anexecution strategy σ ∈ SΓ is ε-dynamic if it satisfies all the Hε-constraints,namely, for any two scenarios s1, s2 ∈ ΣP and any event u ∈ V +
s1,s2 , theexecution strategy σ satisfies the following constraint, denoted Hε(s1; s2;u):
[σ(s1)]u ≥ min(
[σ(s2)]u∪[σ(s1)]v + ε | v ∈ ∆(s1; s2)
)A CSTN Γ is ε-DC if it admits σ ∈ SΓ which is both viable and ε-dynamic.
v1
v2us1
us2
s1
s2
A,−ε
A,−ε
A,0
Figure: An Hε(s1; s2;u) constraint, modeled as a hyperarc.Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 44/89

ε-dynamic-consistency
Lemma 1If Γ is ε-dynamically-consistent, for some ε > 0, then Γ isε′-dynamically-consistent for every ε′ ∈ (0, ε].
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 45/89

ε-dynamic-consistency
Lemma 2Let σ be a dynamic execution strategy for the CSTN Γ. Then, there exists asufficiently small real number ε ∈ (0,+∞) such that σ is ε-dynamic.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 45/89
ε-dynamic-consistency
Lemma 3Let σ be an ε-dynamic execution strategy for the CSTN Γ, for someε ∈ (0,+∞). Then, σ is dynamic.
⇒ Dynamic-Consistency of CSTNs is expressible with Max-Plus (or Min-Plus)constraints.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 45/89
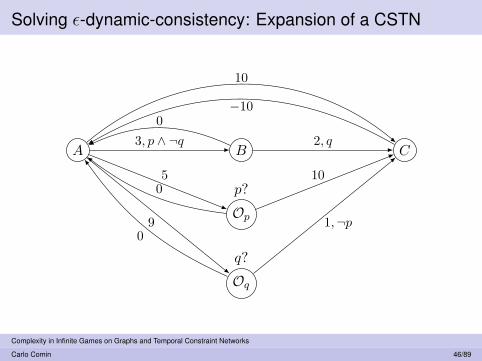
Solving ε-dynamic-consistency: Expansion of a CSTN
A B C
Op
p?
Oq
q?
10
−10
3, p ∧ ¬q 2, q0
50
90
10
1,¬p
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 46/89

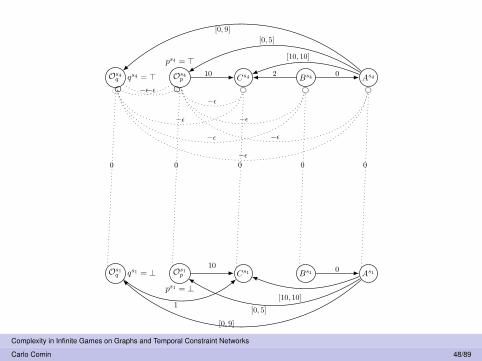
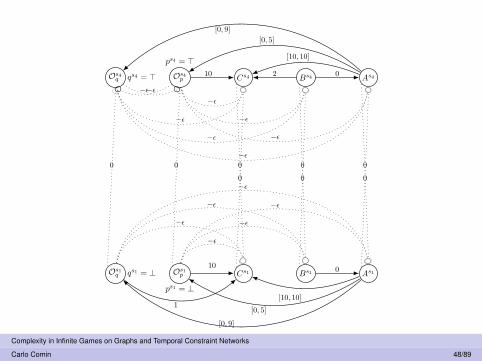
Solving ε-dynamic-consistency: Expansion of a CSTN
As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
An excerpt of the expansion of the CSTN Γ with two scenarios s1 and s4.Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 47/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89
As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
0
−ε
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
0
−ε
−ε0
−ε
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89
As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89

As4Bs4Cs4Os4p
ps4 = >
Os4q qs4 = >
Os1q qs1 = ⊥ Os1p
ps1 = ⊥
Cs1 Bs1 As1
[10, 10]
2 0
[0, 5][0, 9]
10
[10, 10]
0
[0, 5]
[0, 9]
10
1
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
0
−ε
−ε0
−ε
−ε
0
−ε
−ε
0
−ε
0
−ε
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 48/89
Solving ε-DC: reducing from CSTN Γ to HyTNHε(Γ)
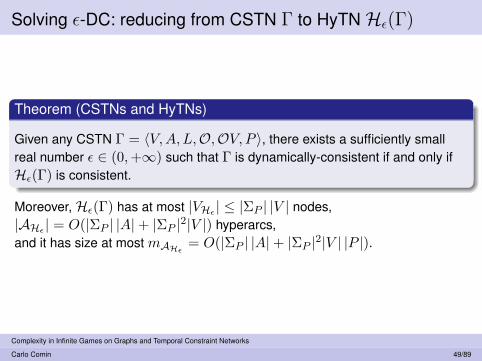
Theorem (CSTNs and HyTNs)
Given any CSTN Γ = 〈V,A,L,O,OV, P 〉, there exists a sufficiently smallreal number ε ∈ (0,+∞) such that Γ is dynamically-consistent if and only ifHε(Γ) is consistent.
Moreover,Hε(Γ) has at most |VHε | ≤ |ΣP | |V | nodes,|AHε | = O(|ΣP | |A|+ |ΣP |2|V |) hyperarcs,and it has size at most mAHε = O(|ΣP | |A|+ |ΣP |2|V | |P |).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 49/89
The bound ε(Γ) ≥ |ΣP |−1 |V |−1 is sharp.
A natural question is whether the lower bound ε(Γ) ≥ |ΣP |−1 |V |−1 canbe improved up to ε(Γ) = Ω(|V |−1)...
... this would improve the time complexity by a factor |ΣP |.However, the following theorem shows that this is not the case byexhibiting a CSTN for which ε(Γ) = 2−Ω(|P |).
This proves that the bound ε(Γ) ≥ |ΣP |−1 |V |−1 is (almost) sharp.
Theorem
For each n ∈ N0 there exists a CSTN Γn such that
ε(Γn) < 2−n+1 = 2−|Pn|/3+1,
where Pn is the set of boolean variables of Γn.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 50/89
The bound ε(Γ) ≥ |ΣP |−1 |V |−1 is sharp.
A natural question is whether the lower bound ε(Γ) ≥ |ΣP |−1 |V |−1 canbe improved up to ε(Γ) = Ω(|V |−1)...
... this would improve the time complexity by a factor |ΣP |.However, the following theorem shows that this is not the case byexhibiting a CSTN for which ε(Γ) = 2−Ω(|P |).
This proves that the bound ε(Γ) ≥ |ΣP |−1 |V |−1 is (almost) sharp.
Theorem
For each n ∈ N0 there exists a CSTN Γn such that
ε(Γn) < 2−n+1 = 2−|Pn|/3+1,
where Pn is the set of boolean variables of Γn.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 50/89

How Γn looks like
Y1
Y1?
X10
X1?
Z1
Z1?1, X1Y1
[2],¬X1 [2],¬Y1
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 51/89

How Γn looks like
Y1
Y1?
X10
X1?
Z1
Z1?
Y2
Y2?
X2
X2?
Z2
Z2?
1, X1Y1
[2],¬X1 [2],¬Y1
[5], Z1 [5],¬Z1X2Y2
[5],¬Z1 [5], Z1X2Y2
[2],¬X2 [2],¬Y2
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 51/89

How Γn looks like
Y1
Y1?
X10
X1?
Z1
Z1?
Y2
Y2?
X2
X2?
Z2
Z2?
Yn
Yn?
Xn
Xn?
Zn
Zn?
1, X1Y1
[2],¬X1 [2],¬Y1
[5], Z1 [5],¬Z1X2Y2
[5],¬Z1 [5], Z1X2Y2
[2],¬X2 [2],¬Y2
[5],¬Z2 [5], Z2X3Y3
[5], Z2 [5],¬Z2X3Y3
[2],¬Xn [2],¬Yn
[5], Zn−1 [5],¬Zn−1XnYn
[5],¬Zn−1 [5], Zn−1XnYn
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 52/89

Chapter 4Instantaneous-Reaction Time in DC-Checking of CSTNs
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 53/89

Instantaneous-Reaction Time (TIME2016)
Instantaneous Reaction-TimeThe ε-DC notion is interesting per se, and the ε-DC-Checking algorithm(TIME2015) rests on the assumption that ε > 0;
I i.e., leaving unsolved the question of what happens when ε = 0.
Then, we introduced and studied π-DC, a sound notion of DC with aninstantaneous reaction-time.
I i.e., one in which the planner can react to any observation at the sameinstant of time in which the observation is made.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 54/89
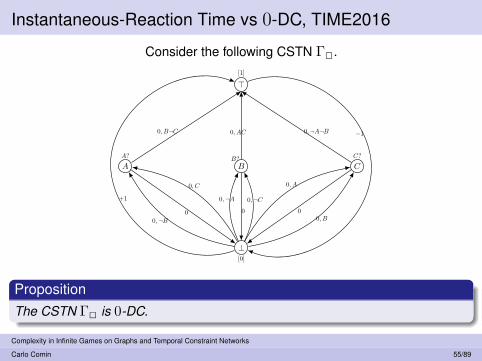
Instantaneous-Reaction Time vs 0-DC, TIME2016
Consider the following CSTN Γ2.
>[1]
BB?
A
A?C
C?
⊥[0]
+1
−1
0,¬B0
0, C
0, B¬C
0,¬A
00,¬C
0, AC
0, A
00, B
0,¬A¬B
PropositionThe CSTN Γ2 is 0-DC.
Still ...Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 55/89

Instantaneous-Reaction Time vs 0-DC (TIME2016)
>1
C1
B0
A0
⊥0
ΣP2
000; 001
>1
C
0
B
0
A
1
⊥0
010; 110
>1
C0
B0
A0
⊥0
011; 100
>1
C
0
B
1
A
0
⊥0
101; 111
0
0
[1]
0
[1]
00
0
0
0
[1]
0
0
0
[1]
0
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 56/89

π-DC
We need to take explicitly into account an additional ordering between theobservation events scheduled at the same execution time.
π-Execution-StrategyAn ordered-Execution-Strategy (π-ES) for Γ is a mapping:
σ : s 7→([σ(s)]t, [σ(s)]π
),
s ∈ ΣP , [σ(s)]t ∈ ΦV and [σ(s)]π : OV +s 1, . . . , |OV +
s | is bijective.
RemarkWe require positions to be coherent w.r.t. execution times, i.e.,∀(Op,Oq ∈ OV +
s ) if [σ(s)]tOp < [σ(s)]tOq then [σ(s)]πOp < [σ(s)]πOq .
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 57/89
π-DC
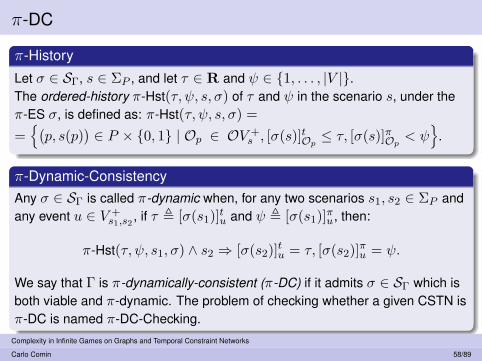
π-History
Let σ ∈ SΓ, s ∈ ΣP , and let τ ∈ R and ψ ∈ 1, . . . , |V |.The ordered-history π-Hst(τ, ψ, s, σ) of τ and ψ in the scenario s, under theπ-ES σ, is defined as: π-Hst(τ, ψ, s, σ) ==(p, s(p)
)∈ P × 0, 1 | Op ∈ OV +
s , [σ(s)]tOp ≤ τ, [σ(s)]πOp < ψ
.
π-Dynamic-ConsistencyAny σ ∈ SΓ is called π-dynamic when, for any two scenarios s1, s2 ∈ ΣP andany event u ∈ V +
s1,s2 , if τ , [σ(s1)]tu and ψ , [σ(s1)]πu, then:
π-Hst(τ, ψ, s1, σ) ∧ s2 ⇒ [σ(s2)]tu = τ, [σ(s2)]πu = ψ.
We say that Γ is π-dynamically-consistent (π-DC) if it admits σ ∈ SΓ which isboth viable and π-dynamic. The problem of checking whether a given CSTN isπ-DC is named π-DC-Checking.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 58/89

π-DC
RemarkDue to the strict inequality “[σ(s)]πOp < ψ" in the definition of π-Hst(·), in aπ-dynamic π-ES, there must be exactly one Op′ ∈ OV , for some p′ ∈ P ,which is executed at first (w.r.t. both execution time and position) under allpossible scenarios s ∈ ΣP (i.e., a root).
a
bc
cd
d
cd
bd
d
0
0
10
11 0
10
1
An example of a permutation-scenario-tree (ps-tree) over P = a, b, c, d.Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 59/89

π-DC
In summary, the following chain of implications hold on the various DCs:
(ε-DC, ε > 0)⇔ DC6⇐⇒ π-DC
6⇐⇒ (ε-DC, ε = 0)
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 60/89
Main Result
Main Algorithmic Result [CCR, TIME2016]
The time-complexity of π-DC-Checking problem remains (pseudo)Singly-Exponential in the number of propositional letters P of the input CSTN.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 61/89
Chapter 5Linear Time Algorithm for Update Gamesvia Strongly-Trap-Connected Components
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 62/89
Update Games: the model
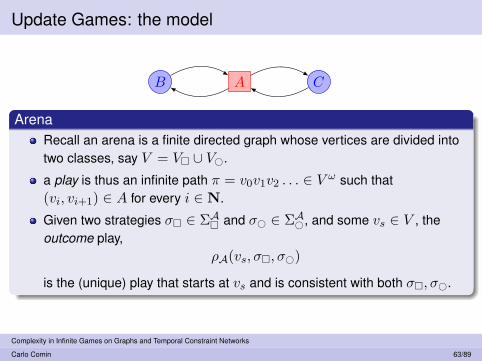
AB C
ArenaRecall an arena is a finite directed graph whose vertices are divided intotwo classes, say V = V ∪ V#.
a play is thus an infinite path π = v0v1v2 . . . ∈ V ω such that(vi, vi+1) ∈ A for every i ∈ N.
Given two strategies σ ∈ ΣA and σ# ∈ ΣA#, and some vs ∈ V , theoutcome play,
ρA(vs, σ, σ#)
is the (unique) play that starts at vs and is consistent with both σ, σ#.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 63/89
Update Games: the model
AB C
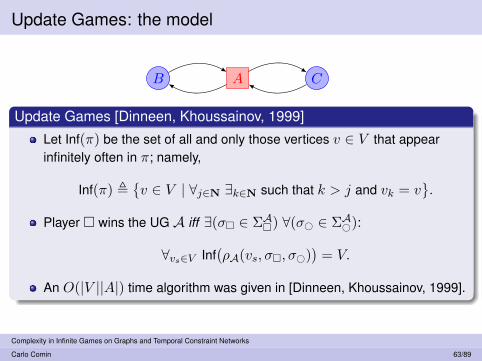
Update Games [Dinneen, Khoussainov, 1999]
Let Inf(π) be the set of all and only those vertices v ∈ V that appearinfinitely often in π; namely,
Inf(π) ,v ∈ V | ∀j∈N ∃k∈N such that k > j and vk = v
.
Player wins the UG A iff ∃(σ ∈ ΣA) ∀(σ# ∈ ΣA#):
∀vs∈V Inf(ρA(vs, σ, σ#)
)= V.
An O(|V ||A|) time algorithm was given in [Dinneen, Khoussainov, 1999].
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 63/89

C B
AH
D G
FE
(a) An Arena A.
A 1
B 2
C 3
D 4
E 5
F 6
G 7
H 8
tree
tree
tree
tree
tree
tree tree
frond
frond
frond
(b) The rev-palm-treegenerated by rev-DFS,with indices of vertices.
1.(B,A)2.(C,B)3.(D,C)4.(E,D)5.(F,E)6.(A,F )
7.(G,F )8.(D,G)9.(H,E)10.(C,H)11.(G,B)12.(H,A)
(c) The order of arcs’exploration.
Figure: An arena (a), and a rev-palm-tree (b), generated by rev-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 64/89

Alphabet of a playFor any finite (or infinite) path p ∈ V ∗ (or p ∈ V ω), the alphabet of p is
Ξ(p) , v ∈ V | v appears in p.
Trap-ReachabilityGiven an arena A on vertex set V , let U ⊆ V and u, v ∈ U . We say that v isU -trap-reachable from u when there exists σ ∈ ΣA (i.e., σ = σ(u, v))such that for every σ# ∈ ΣA#:
[reachability] v ∈ Ξ(ρA(u, σ, σ#)
); and,
[entrapment] Ξ(ρA(u, σ, σ#, v)
)⊆ U .
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 65/89
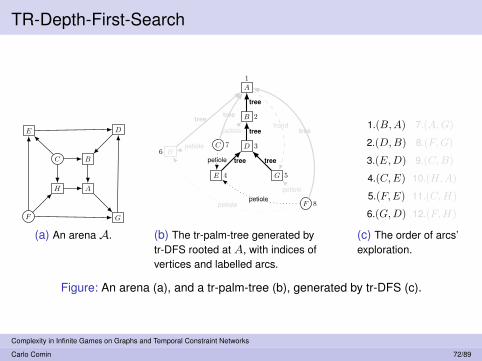
TR-Palm-Tree
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
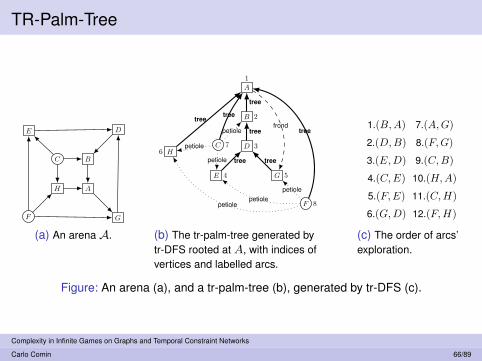
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 66/89
TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
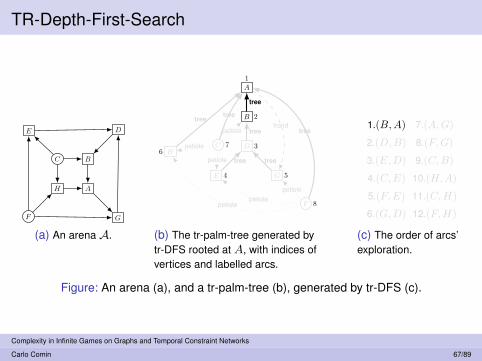
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 67/89
TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
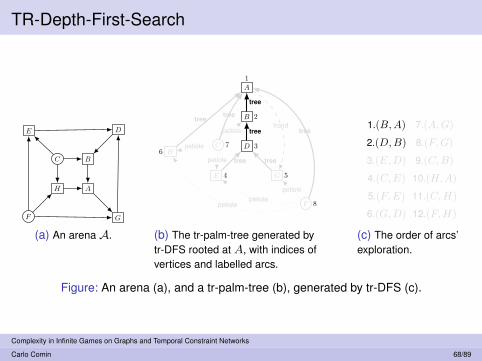
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 68/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 69/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 70/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 71/89
TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 72/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 73/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 74/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 75/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 76/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 77/89

TR-Depth-First-Search
C B
AH
E D
GF
(a) An arena A.
A
1
B 2
C 7 D 3
E 4 G 5
F 8
H6
tree
petiole tree
treepetiole
petiole
tree
frond
petiole
tree
petiole
petiole
tree
tree
(b) The tr-palm-tree generated bytr-DFS rooted at A, with indices ofvertices and labelled arcs.
1.(B,A)2.(D,B)3.(E,D)4.(C,E)5.(F,E)6.(G,D)
7.(A,G)8.(F,G)9.(C,B)
10.(H,A)11.(C,H)12.(F,H)
(c) The order of arcs’exploration.
Figure: An arena (a), and a tr-palm-tree (b), generated by tr-DFS (c).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 78/89
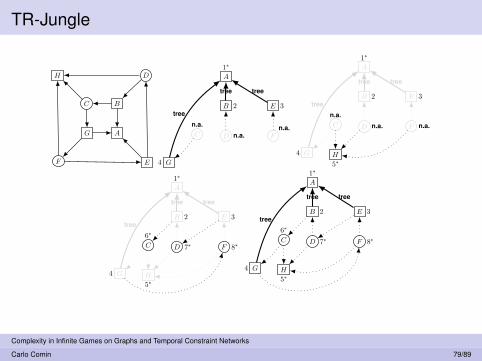
TR-Jungle
C B
AG
H D
EF
A
1∗
B 2
C
n.a.
D n.a.
E 3
Fn.a.
G4
tree tree
tree
A
1∗
B 2
C
n.a.
H
5∗
D n.a.
E 3
F n.a.
G4
tree tree
tree
A
1∗
B 2
C
6∗
H
5∗
D 7∗
E 3
F 8∗
G4
tree tree
tree
A
1∗
B 2
C
6∗
H
5∗
D 7∗
E 3
F 8∗
G4
tree tree
tree
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 79/89
Strongly-Trap-Connectedness
We say that U ⊆ V is strongly-trap-connected when for every (u, v) ∈ U × Uthere exists some σ ∈ ΣA (i.e., σ = σ(u, v)) such that σ : u U; v.
Strongly-Trap-Connected ComponentsThe binary relation ∼stc on V is defined as follows:
∼stc,
(u, v) ∈ V × V | ∃U⊆V s.t. U is STC and u, v ⊆ U.
It holds that ∼stc is an equivalence relation on V .Equivalence classes of ∼stc are strongly-trap-connected components of A.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 80/89
Main Results on UGs
UGs and STCThere is a linear time algorithm for decomposing any given arena into itsstrongly-trap-connected components.
UGs and STCAn UG A is winning for Player if and only if V is strongly-trap-connected.
Deciding UGs in Linear TimeDeciding whether or not a given UG A is winning for Player takesΘ(|V |+ |A|) time.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 81/89
Application to Explicit McNaughton-Muller Games
Explicit McNaughton-Muller Games
The most straightforward way to represent a Müller winning condition F ⊆ 2Vis to provide an explicit list of subsets of vertices:
F = Fi ⊆ V | 1 ≤ i ≤ `, for some ` ∈ N.
A play ρ ∈ V ω is winning for Player if and only if Inf(ρ) ∈ F .
Polynomial Time Algorithm [Horn 2008]Explicit MMGs can be solved in polynomial time, where anO(|F| · (|A|+ |F|)2) time algorithm is given in [Horn 2008].
Quadratic Time Algorithm for Explicit MMGs
We can solve Explicit MMGs in O(|F| · (|A|+ |F|)
)quadratic time.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 82/89

Chapter 6An Improved Upper Bound on Value Problem and Optimal Strategy Synthesis
in MPGs
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 83/89

Table: Complexity of the main Algorithms for solving MPGs.
Algorithm Value ProblemOptimalStrategySynthesis
Note
This work Θ(|V |2|E|W ) Θ(|V |2|E|W ) Determ.Brim11 O(|V |2|E|W log(|V |W )) O(|V |2|E|W log(|V |W )) Determ.
ZP96 Θ(|V |3|E|W ) Θ(|V |4|E|W log |E||V |) Determ.
LP07 O(2|V | |V | |E| logW ) n/a Determ.
An06 O(|V |2|E| e
2
√|V | ln
(|E|√
|V |
)+O(√
|V |+ln |E|))same complexity Random.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 84/89

An O(|V |2|E|W ) Improved Upper Bound for OSS in MPGs
Our Contribution: Improved Upper Bound for MPGs [CR, Algorithmica, 2016]
There exists an algorithm for solving the STRATEGY SYNTHESIS and theVALUE problem in:
O(|V |2|E|W ) time and O(|V |) space.
Particularly, the time complexity is bounded as follows:
Θ(|V |2|E|W +
∑v∈V
degΓ(v) · `0Γ(v)),
where `0Γ(v) ≤ (|V | − 1)|V |W denotes the total number of times that anenergy-lifting operator δ(·, v) is applied to any v ∈ V .
So, the best previously known upper bound [Brim, et al. 2011] is improved by afactor O(log(|V |W )). Here, W = maxe∈E |we|.
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 85/89

Surprisingly, in this problem, a Linear Search turns out to be faster than a Binary Search...
The O(|V |2|E|W log(|V |W )) algorithm of Brim, et al. (2011) is basedon a binary search procedure that reduces the VALUE and the STRATEGY
SYNTHESIS problems to multiple resolutions of the DECISION problem.Can the binary search be avoided ?
I The answer is YES.
Our algorithm also reduces to multiple resolutions of the DECISIONproblem, but it succeeds in amortizing the cost of these.
I Actually, each DECISION problem generated gets solved by thecomputation of a Small Energy Progress Measure (SEPM) into thecorresponding Energy Game (EG).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 86/89

Chapter 7A Faster O(|V |2|E|W ) Time Energy Algorithm for MPGs
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 87/89

A Faster O(|V |2|E|W ) Algorithm for MPGs which is not Ω(|V |2|E|W )
A more technical but “truly" O(|V |2|E|W ) algorithm for MPGs
The running time of our first solution turns out to be also Ω(|V |2|E|W ),the actual time complexity being
Θ(|V |2|E|W +
∑v∈V
degΓ(v) · `0Γ(v)).
We introduce a novel algorithmic scheme, named Jumping, which tackleson some further regularities of the problem, thus reducing the estimate onthe pseudo-polynomial time complexity of MPGs to:
O(|E| log |V |) + Θ( ∑v∈V
degΓ(v) · `1Γ(v)).
I `1Γ ≤ (|V | − 1)|V |W (worst-case; but experimentally, `1Γ `0Γ)I the working space is Θ(|V |+ |E|).
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 88/89

Thank you
Thank you for the attention
Complexity in Infinite Games on Graphs and Temporal Constraint Networks
Carlo Comin 89/89