denihartono123.files.wordpress.com · web viewkontribusi utama dari makalah ini adalah dalam dua...
TRANSCRIPT

TUGAS 2 TUGAS SOFTSKILL TEKNOLOGI INFORMASI & MULTIMEDIA
NAMA : Deni hartono NPM : 21412829KELAS: 4IC07
Contents lists available at ScienceDirect
Energi terbarukan
j o u r n a l h o m e p a g e : w w w . e l s e v i e r . c o m / l o c a t e / r e n e n e
Menganalisis RMS dan nilai-nilai puncak sinyal getaran untuk pemantauan kondisi angin gearbox turbin
Joel Igba a, c, *, Kazem Alemzadeh a, Christopher Durugbo b, Egill Thor Eiriksson c
aFaculty of Engineering, University of Bristol, BS8 1UB, United Kingdomb Department of Management, University of Bristol, BS8 ITN, United Kingdomc Vestas Wind Systems A/S, Hedeager 42, 8200 Aarhus N, Denmark

a r t i c l e i n f o
Riwayat artikel:Menerima Februari 2015 4 diterima dalam bentuk revisi 7 November 2015 Diterima 1 Januari 2016Tersedia online 22 Januari 2016
Kata kunci : Gearbox pemantauan kondisi RMS getaran teori nilai ekstrim Kondisi berbasis pemeliharaan
a b s t r a c t
turbin angin (WTS) dirancang untuk beroperasi di bawah kondisi lingkungan yang ekstrim. Ini berarti bahwa beban ekstrim dan bervariasi dialami oleh komponen WT perlu diperhitungkan serta mendapatkan akses ke peternakan angin (WFS) pada waktu yang berbeda tahun ini. pemantauan kondisi (CM) digunakan oleh pemilik WF untuk menilai kesehatan WT dengan mendeteksi kegagalan gearbox dan berencana untuk operasi dan pemeliharaan (O & M). Namun, ada beberapa tantangan dan keterbatasan dengan tersedia secara komersial CM tech-nologies e mulai dari biaya pemasangan sistem pemantauan untuk kemampuan untuk mendeteksi kesalahan accu-rately. Penelitian ini bertujuan untuk menjawab beberapa tantangan ini dengan mengembangkan teknik baru untuk deteksi kesalahan menggunakan RMS dan Extreme (puncak) nilai sinyal getaran. Teknik yang diusulkan didasarkan pada tiga model (korelasi sinyal, getaran ekstrim, dan intensitas RMS) dan telah vali-tanggal dengan data time domain driven menggunakan data CM dari WTS operasional. Temuan penelitian ini menunjukkan bahwa pemantauan RMS dan nilai-nilai ekstrim berfungsi sebagai indikator utama untuk deteksi dini kesalahan menggunakan teori nilai ekstrim, memberikan pemilik WF waktu untuk menjadwalkan O & M. Selain itu, juga di-dicates bahwa keakuratan prediksi masing-masing teknik CM tergantung pada fisika kegagalan. Hal ini menunjukkan bahwa pendekatan yang menggabungkan kekuatan dari beberapa teknik yang dibutuhkan untuk penilaian kesehatan holistik komponen WT.
© 2016 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/).
1.pengantar
Ketersediaan dan konsekuen O & M biaya WFS dipengaruhi oleh kegagalan dan downtime komponen WT seperti gearbox . Di WFS lepas pantai , di mana prosedur perbaikan yang kompleks dan logistik dipengaruhi oleh kondisi cuaca ekstrim , dampak dari kegagalan komponen dapat menyebabkan lebih lama WT down- kali [ 1,2 ] . Isu-isu O & M telah memacu kebutuhan untuk pemantauan dan penilaian kemampuan kondisi remote untuk WT compo - motivasional untuk mendeteksi kesalahan awal cukup agar dapat merencanakan kegiatan O & M dan meminimalkan downtime . CM secara bertahap menjadi negara -of - the- art pendekatan untuk memenuhi kebutuhan ini di besar multi - megawatt dan aplikasi WT lepas pantai setelah diminta oleh badan sertifikasi setelah serangkaian kegagalan WT bencana di awal 1990-an [ 3 ] . Namun adopsi teknologi CM untuk komersial
* Corresponding author. Faculty of Engineering, University of Bristol, BS8 1UB, United Kingdom.
E-mail address: [email protected] (J. Igba).
aplikasi WF belum tanpa tantangan . Di satu sisi , menginstal tujuan-dibangun CMS , yang biasanya tidak menemani WTS kecuali dalam beberapa aplikasi lepas pantai , sangat mahal . Di sisi lain , meskipun sebagian besar WTS besar memiliki Supervisory Control dan Data Acquisition ( SCADA ) sistem , sistem SCADA juga memiliki masalah dengan keandalan prediksi dan akurasi [ 3 ] .
Penelitian ini mengusulkan perspektif WT gearbox O & M melalui penggunaan CM untuk deteksi kesalahan awal , memungkinkan pemilik WF waktu untuk merencanakan O & M juga di
memajukan dan menghemat biaya dengan mengurangi downtime sebagai konsekuensinya . Pendekatan perawatan ini disebut kondisi pemeliharaan berdasarkan ( CBM ) [ 4,5] . Tidak seperti pemeliharaan preventif ( PM ) [ 6 ] , pendekatan CBM mengambil kondisi komponen dipantau ketika membuat O & M keputusan . Ini pro - vides kesempatan untuk kedua perencanaan yang efektif dan sched - uling tindakan pemeliharaan [ 7 ] . PM memperhitungkan kegagalan sebelumnya dan sejarah layanan , anjak ini sebagai risiko param - eters ketika menghitung interval antara periode operasi saat ini dan wear- out atau kegagalan berikutnya waktu [ 6 ] . Sebaliknya , dengan CBM tidak ada kebutuhan untuk sejarah kegagalan sebelumnya . O & M perencanaan dicapai dengan memantau parameter kunci yang akan menjadi indikasi

http://dx.doi.org/10.1016/j.renene.2016.01.006
0960-1481/© 2016 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/).

J. IGBA et al . / Energi Terbarukan 91 ( 2016 ) 90e10691

setiap penurunan kesehatan WT, sehingga untuk mendeteksi kegagalan pada tahap awal mereka. Keberhasilan CBM tergantung pada jenis dan ketepatan teknik CM digunakan, metode analisis dan interpre-tasi hasil. Dalam pendekatan CBM yang disajikan dalam penelitian ini, tiga model (sinyal korelasi, getaran ekstrim, dan intensitas RMS) yang pro-berpose dan divalidasi berdasarkan data driven waktu-domain mengatasi keterbatasan kunci dan isu-isu yang telah diidentifikasi dalam literatur [ 3,8,9]. Untuk ini, pendekatan tiga tahap digunakan, mereka adalah: Data pra-pengolahan, pemodelan dan validasi. Model divalidasi menggunakan data dari turbin operasional dan gagal, berusaha untuk menunjukkan seberapa sensitif model dalam mendeteksi berbagai jenis mode kegagalan di gearbox turbin angin. turbin operasional dengan gearbox sehat yang digunakan untuk menunjukkan respon normal untuk setiap model sementara gearbox rusak dengan beberapa mode kegagalan gearbox umum digunakan untuk menunjukkan pendeteksian dari masing-masing model untuk berbagai jenis kegagalan.
Kontribusi utama dari makalah ini adalah dalam dua bagian : Peningkatan teknik yang dikenal menggunakan nilai RMS getaran [ 8,10 ] dan aplikasi untuk memantau kesehatan gearbox WT . Pengembangan dan validasi pendekatan baru untuk mendeteksi normal operasi gearbox WT menggunakan teori nilai ekstrim .Garis besar artikel ini adalah sebagai berikut : Pada Bagian 2 , ulasan singkat literatur tentang CM dan CBM dilakukan dengan mengidentifikasi teknik utama dan keterbatasan pendekatan saat ini . Dalam Bagian 3 , tiga model yang diusulkan untuk memenuhi keterbatasan dikembangkan . Bagian 4 menyajikan hasil setelah data dari 10 gearbox WT digunakan untuk memvalidasi model yang diusulkan . Sebuah perbandingan yang sehat dibandingkan gearbox rusak dibuat untuk setiap model dan studi kasus untuk mendeteksi tiga mode kegagalan umum dari gearbox modul kecepatan tinggi juga dilakukan . Akhirnya , dalam Bagian 5 , temuan dirangkum dan pandangan ke arah penelitian masa depan disajikan .
2. karya Terkait Penelitian yg di CM dari gearbox WT telah meliput berbagai macam aplikasi mulai dari teknik standar seperti getaran dan puing-puing minyak analisis [1,11e16] kepada orang lain seperti emisi akustik [17] dan analisis SCADA [7e9,18e22] dll Sementara tiga pertama adalah tujuan-dibangun CMS untuk memantau parameter spesifik dan mendeteksi kegagalan baru mulai, sistem SCADA yang terutama diinstal pada WTS untuk mengukur parameter operasional seperti kecepatan angin, suhu lingkungan, suhu komponen dan generator listrik [3,5]. Namun, karena mereka sudah tersedia, sistem SCADA sekarang juga digunakan untuk CM. Ini telah dicapai dengan menciptakan model-model dan tren dari data SCADA yang ketika ditafsirkan, digunakan untuk menilai kondisi WT komponen [1,8,20,23,24]. Sebuah contoh yang baik dari teknik yang tidak bergantung pada CMS tradisional dapat ditemukan dalam Ref. [25], di mana pengukuran kecepatan sudut dari poros input gearbox dan poros ke generator yang digunakan untuk mendefinisikan fungsi kesalahan untuk mendeteksi gigi dan kerusakan bantalan. Hal ini juga diperhatikan bahwa karya-karya sebelumnya pada WT gearbox CM telah difokuskan pada dua helai utama: (1) CM algo-rithm pengembangan, validasi dan perbaikan, seperti [16,25e28], dan (2) penilaian teknologi CM dan pengembangan, misalnya [11,15,29,30].
Terlepas dari teknik dan / atau teknologi yang diterapkan untuk CM , kemampuan CM
tergantung pada dua faktor [ 30 ] : ( a) jumlah dan jenis sensor dan ( b ) pemrosesan sinyal terkait dan penyederhanaan metode , dengan yang terakhir menjadi relevan untuk penelitian ini . Jumlah dan jenis sensor umumnya ditentukan oleh jenis komersial CMS atau SCADA sistem yang digunakan dan berada di luarlingkup artikel ini. Menurut [30], beberapa contoh metode pemrosesan sinyal yang digunakan untuk CM meliputi: Analisis Statistik, Waktu Analisis Domain, Analisis cepstrum, Transformasi Wavelet dll Ref. [31], tiga metode CM diterapkan analisis SCADA dibahas, yaitu: Signal Trending, Artificial Neural Networks dan Pemodelan Fisik. Semua metode ini memiliki kecenderungan untuk menyebabkan alarm palsu atau prediksi yang keliru jika model yang digunakan untuk deteksi tidak akurat atau cukup canggih [8,23]. Selain itu, model yang lebih canggih membutuhkan algoritma yang lebih rumit yang komputasi intensif dan lebih sulit untuk mengembangkan [27]. Meskipun sebagian besar tujuan-dibangun CMS datang dengan algoritma deteksi built-in, mereka mahal untuk menginstal dan belum sepenuhnya dibenarkan secara ekonomi [24,32]. sistem SCADA di sisi lain telah menjadi bagian dari yang paling WTS besar dan karenanya tidak ada biaya tambahan yang dikeluarkan untuk menggunakan SCADA untuk CM. Pada sisi negatifnya, analisis parameter SCADA rentan terhadap tingginya tingkat alarm palsu. Hal ini disebabkan isu-isu mendasar berikut dengan SCADA:
SCADA memiliki sampling rate 10 menit penerbangan yang telah dianggap terlalu rendah untuk diagnosis kesalahan akurat ketika konvensi - nasional teknik CM digunakan [ 3,8 ] .Model yang dihasilkan dari yang relatif miskin karena data pelatihan SCADA berisik [ 1 ] .
nilai data SCADA bervariasi dari berbagai operasi con - ditions [ 8 ] . Akibatnya , perubahan data SCADA tidak berarti kesalahan telah dikembangkan ; itu hanya bisa sebagai akibat dari perubahan kondisi operasi . Hal ini membawa kompleksitas tambahan dalam menganalisis data yang SCADA karena model maju harus menormalkan variabilitas dan musiman kondisi operasi dalam rangka meningkatkan akurasi [ 7 ] .
Dari tiga isu , hanya dua yang pertama yang unik data SCADA . Masalah dengan variabilitas kondisi operasional juga memiliki efek pada beberapa parameter dipantau diperoleh dari CMS komersial, seperti getaran . Sebuah contoh yang baik dari ini adalah bagaimana kontrol pitch WTS menginduksi variabilitas parameter CM dipantau . Hal ini karena kontrol pitch membatasi kekuatan aerodinamis dari turbin untuk mengontrol output daya [ 33 ] , maka yang mengarah ke non - linearities dalam perilaku turbin [ 8 ] . parameter CM seperti getaran gearbox dan suhu , sering bervariasi kisaran luas [ 8 ] dan perubahan tingkat mereka tidak selalu menunjukkan terjadinya kesalahan , namun kesalahan dapat menyebabkan perubahan nilai-nilai ini [ 3,8,34 ]
Masalah-masalah yang diidentifikasi di atas memiliki pengaruh pada beberapa teknik analisis yang umum digunakan dalam literatur, terutama jika usaha tidak cukup dilakukan dalam data pra-pengolahan dan variabilitas operasional yang normal-ising. Dua contoh yang baik yang menggambarkan hal ini adalah:. Perangkap dalam membandingkan sama dan / atau tetangga turbin melalui sinyal trending (. Lihat Gambar 1E3), dan efek musiman pada model fisik berdasarkan energi gearbox bal-Ance (lihat Gambar 4 dan 5). Pertama, sementara membandingkan operasi param-parameter-turbin tetangga telah terbukti berguna dalam menentukan outlier [31], itu tidak selalu menunjukkan gambaran yang benar dan dapat menyesatkan. Hal ini karena WTS berbeda dan komponen mereka, meskipun identik dalam desain, mungkin memiliki respon yang berbeda dalam hal parameter CM digunakan untuk tren (Gambar. 1E3 menggambarkan ini). Kedua, penggunaan minyak gearbox dan bantalan suhu juga contoh parameter yang umum digunakan untuk memantau kesehatan komponen turbin angin [1,8,23,35]. Pendekatan ini telah digunakan untuk model keseimbangan energi dari gearbox, yaitu energi baik ditularkan oleh gearbox sebagai daya output atau hilang sebagai energi panas dalam bentuk kenaikan suhu. Di sini, kerugian di efi-siensi gearbox akan ditandai dengan peningkatan kehilangan energi yang akibatnya menunjukkan kesalahan. Namun, musiman suhu mempengaruhi keakuratan pendekatan jika tidak

92
J. IGBA et al . / Energi Terbarukan 91 ( 2016 ) 90e106
Ara. 1. Masing-masing kecepatan tinggi daya dukung dan getaran hubungan selama dua turbin identik dan tetangga selama ( a) operasi normal dan ( b ) setahun setelah . Di sini , kurva telah diberi label dengan jelas membedakan antara turbin sehat dan turbin kedua yang gagal dari HS bantalan pitting setahun setelah data dikumpulkan . Pertama , jika getaran rata-rata semua turbin tetangga digunakan untuk memeriksa outlier . Jika salah satu adalah untuk hanya membandingkan kekuatan dan getaran respon diukur dari dua turbin pada Gambar . 1 (a , itu tidak akan telah dibuat-buat untuk menyimpulkan bahwa turbin sehat dalam kondisi miskin relatif terhadap tetangganya . Namun , dari Gambar . 1 ( b ) , dapat dilihat bahwa getaran turbin gagal meningkat secara dramatis ketika kegagalan terjadi setahun kemudian sementara yang dari turbin sehat hampir tidak berubah dan hampir identik dengan nilai-nilai untuk operasi normal dimodelkan .
Ara. 2. Kecepatan angin dibandingkan hubungan getaran turbin tetangga ( a) selama operasi normal dan ( b ) satu tahun kemudian ; observasi mirip dengan Gambar . 1 terlihat di sini di mana Gambar . 2 ( a) menunjukkan turbin sehat dengan getaran yang lebih tinggi dan vise versa untuk Gambar . 2 ( b )
dinormalisasi (lihat Gambar. 4 dan 5).Contoh-contoh ini (Gambar. 1E5) menyarankan pentingnya untuk tidak-malising variabilitas parameter operasional dan lingkungan. Artikel ini mengusulkan pendekatan alternatif dengan menggunakan indikator kondisi yang tidak sensitif terhadap variasi ini, tetapi perubahan dalam kesehatan gearbox. Ada banyak fitur statistik getaran yang menggambarkan indikator syarat utama untuk kesehatan gearbox, seperti RMS, Kurtosis, Crest Factor, nilai puncak dll ini semuanya telah dibahas sangat baik pada referensi. [10,36e38]. Indikator syarat utama untuk getaran gearbox, penulis memilih untuk menggunakan RMS dan nilai-nilai puncak waktu sinyal domain getaran karena perubahan nilai-nilai mereka dapat menjadi indikator utama dari kesalahan yang akan datang seperti yang terlihat pada Gambar. 1E3. Secara umum, nilai RMS dari sinyal getaran telah digunakan untuk memantau tingkat getaran keseluruhan gearbox [10]. Hal ini karena tingkat getaran keseluruhan biasanya meningkat sebagai gearbox memburuk (seperti yang diamati pada Gambar. 5). Oleh karena itu RMS monitoring getaran sangat cocok untuk mendeteksi kegagalan progresif seperti bantalan pitting dan scuffing dan retak poros. Namun, ada kritik dari menggunakan RMS vi-bration untuk gearbox CM, dengan dua masalah yang diketahui diidentifikasi di
literatur. Yang pertama berasal dari saran bahwa nilai-nilai RMS dari sinyal getaran tidak meningkat dengan puncak terisolasi di sinyal , karena itu sangat tidak sensitif terhadap kegagalan gigi gigi baru jadi . Nilainya hanya meningkatkan sebagai kegagalan gigi berlangsung [ 10 ] . Kedua, nilai-nilai RMS juga tidak terpengaruh oleh ledakan singkat dari getaran intensitas rendah dan sebagai pertemuan hasil masalah dalam mendeteksi tahap awal kerusakan bantalan [ 11 ] . dua keterbatasan ini menjabat sebagai motivasi awal bagi penulis untuk mempertimbangkan menggunakan puncak nilai ( ekstrim ) dari sinyal getaran .
3. pendekatan ModellingPada bagian ini , tiga model yang berbeda untuk mendeteksi kesalahan dalam kecepatan tinggi dan tahap kecepatan menengah gearbox WT dikembangkan . Metodologi yang diterapkan dalam pemodelan data getaran telah sengaja disusun dan dirancang untuk mengatasi

keterbatasan kunci dan isu-isu yang telah diidentifikasi dalam literatur [ 3,8,9 ] . Untuk ini , pendekatan tiga tahap telah digunakan untuk mengembangkan model masing-masing disajikan dalam makalah ini . Mereka adalah : Data pre - processing , pemodelan dan validasi . Pertama , seri waktu baku

J. Igba et al. / Energi Terbarukan 91 (2016) 90e106 93
Ara. 3. kurva daya turbin tetangga ( a) selama operasi normal dan ( b ) satu tahun kemudian ; ketika kurva daya dibandingkan, pengamatan yang sangat menarik dibuat , yaitu tidak ada perbedaan yang mencolok antara kurva daya untuk kedua turbin selama operasi normal dan hanya sebelum kegagalan terjadi . Hal ini sangat diharapkan untuk kedua turbin untuk menghasilkan output daya yang sama selama operasi normal karena mereka berdua di peternakan angin yang sama . Namun , orang akan berharap bahwa berdasarkan teori-teori umum kehilangan dalam menghasilkan efisiensi yang dihasilkan dari kerusakan komponen dan degradasi kinerja [ 1,20 ] , bahwa output daya dari turbin yang gagal harus menurunkan selama periode kegagalan . Hal ini tidak terjadi dalam konteks ini . Pengamatan serupa telah dibuat sebelumnya oleh Ref . [ 8 ] . Oleh karena itu ini menunjukkan bahwa sinyal kurva daya turbin adalah indikator lagging untuk mendeteksi kesalahan baru mulai di WT gearbox . Oleh karena itu memiliki keterbatasan mendeteksi kesalahan subassembly lokal [8].
Ara. 4. suhu lingkungan dan gearbox kenaikan suhu rata-rata harian untuk WT dengan HS gearbox bantalan pitting kegagalan ; dalam contoh ini efek musiman ambient tem - perature mempengaruhi akurasi menggunakan perbedaan suhu sebagai pendekatan pemodelan dan karenanya data yang harus dinormalisasi untuk variasi musiman parameter kunci [ 7 ] . Hal ini karena perubahan musiman dalam suhu sekitar langsung mempengaruhi keseimbangan energi dari gearbox yaitu kenaikan suhu .
data getaran , bersama-sama dengan data operasional yang relevan seperti tenaga dan kecepatan angin , perlu pra - diproses untuk menyaring kebisingan dan menormalkan variabilitas operasional . Setelah ini , model yang relevan dikembangkan berdasarkan data . Dalam penelitian ini data didorong pendekatan pemodelan digunakan untuk membangun hubungan antara tingkat getaran dan parameter operasional . Akhirnya , model kemudian divalidasi menggunakan data dari turbin operasional dan gagal , berusaha untuk menunjukkan seberapa sensitif model dalam mendeteksi berbagai jenis kesalahan dalam gearbox turbin angin . Dua tahap pertama ditangani dengan di bagian ini sementara validasi dilakukan di bagian hasil ( lihat Bagian 4 ) .
Data yang digunakan untuk analisis ini adalah 2 menit rata-rata dari data CMS vi - bration berdasarkan , diperoleh sebagai time series dari tujuan - dibangun CMS sensor piezoelektrik accelerometer terpasang pada turbin operasional . Ara. 6 , misalnya , adalah jendela time series satu bulan
CM dan data operasional untuk turbin menunjukkan parameter seperti faktor gearbox HS puncak , puncak dan RMS getaran , daya output generator dan kecepatan angin . Melihat seri waktu baku sendiri tidak memberikan banyak wawasan kesehatan gearbox , kecuali kegagalan telah berkembang menjadi sebuah negara yang parah di mana tingkat getaran menjadi terlalu tinggi seperti yang terlihat pada Gambar . 5. Oleh karena itu , ada kebutuhan dari beberapa model data untuk mendeteksi setiap perilaku abnormal pada gearbox sedini mungkin . Data driven model hubungan antara parameter gearbox getaran dan parameter opera - nasional seperti kecepatan angin dan output daya .

3.1. Data pre-processing
Pre-processing CM data is a very important and fundamental step when developing data models for wind turbines. This is
94J. Igba et al. / Energi Terbarukan 91 (2016) 90e10
Fig. 5. Raw time series of gearbox oil temperature and high speed bearing vibrations of a WT with pitting failure in HS bearing; here, just like the temperature difference chart in Fig. 4, the raw

Ara. 6. time series Baku parameter CM dan operasional dengan 2 min timestamp .
karena ada faktor-faktor yang berbeda, yang jika tidak dicatat atau normalisasi, dapat mempengaruhi data yang CM. Selain faktor kesehatan struc-tanian turbin, seperti geser angin, turbulensi, yang ef-fect lapangan kontrol dll memiliki pengaruh pada data turbin angin CM [8]. Para penulis telah mengadopsi algoritma pra-pengolahan yang dikembangkan oleh Ref. [8] dan dikombinasikan dengan teknik lain dari penyaringan data yang digunakan pada referensi. [9,19]. Langkah pertama dalam tahap Data pra-pengolahan adalah untuk menyaring suara dari data. Ini termasuk tidak termasuk bagian data CM yang memiliki nilai output daya negatif [9]. Hal ini karena ketika output daya negatif itu berarti bahwa turbin mengkonsumsi daya dan tidak menghasilkan listrik, yang bisa terjadi sebelum turbin mencapai pemotongan kecepatan angin [19]. Setelah penyaringan data selesai, langkah selanjutnya adalah segmen data sehingga dapat menghilangkan efek nonlinear kontrol lapangan. Hal ini dicapai dengan membagi kurva daya ke tiga daerah kecepatan angin (Gambar. 7 (a)) [20]. Menurut [39], ada
tiga yang berbeda daerah kecepatan angin :
Region 1 , kali ketika turbin tidak beroperasi atau selama start - up . Region 2 , saat turbin dalam mode operasional di mana diinginkan untuk menangkap sebanyak listrik dari angin mungkin. Region 3 terjadi di atas kecepatan angin dinilai ( kecepatan angin di mana nilai daya dihasilkan ) dan di daerah ini turbin harus membatasi fraksi angin ditangkap agar tidak melebihi beban listrik merancang dinilai . Hal ini dicapai melalui kontrol pitch dari pisau . Ini telah ditunjukkan dalam Ref . [ 8 ] bahwa lebih mudah untuk mendapatkan CM terpercaya sebelum mencapai kecepatan angin dinilai karena tidak adanya efek kontrol nonlinear yang bisa peredam kesalahan fitur con - tained dalam data . Selanjutnya , dengan menyaring periode idle dari

J. Igba et al. / energi terbarukan 91 (2016) 90e106 95
Ara. 7. ( a) plot pencar dari ( b ) kurva daya diproses baku ( un - diproses ) kecepatan WT angin dan daya output .

WT meninggalkan data CM yang terkandung di wilayah 2 sebagai yang paling cocok untuk pemodelan. Hasil pra-pengolahan binned nilai-nilai variabel seperti kecepatan angin, kecepatan generator dan generator listrik, dan CM pa-parameter-. Kecepatan angin digunakan sebagai acuan untuk Binning Data CM dan nilai-nilai yang diharapkan untuk setiap variabel dalam setiap bin diperkirakan berdasarkan distribusi probabilitas sampel yang terkandung dalam sampah. Ini tidak seperti metode diperkenalkan pada standar IEC yang hanya menemukan rata-rata nilai dari masing-masing bin [8]. metode IEC dapat menjadi rentan terhadap adanya satu-off atau outlier dalam data, yang bisa membelokkan nilai rata-rata dari masing-masing bin jauh dari mean sebenarnya. Ara. 7 (b) menunjukkan kurva daya scatter plot data pra-diproses model dari Gambar. 7 (a).
3.2. korelasi sinyal dan tren
Korelasi parameter CM yang berbeda dan beberapa variabel operasional dapat diperoleh dari data pra-diproses CM. Salah satu cara untuk melakukan ini adalah dengan menciptakan plot pencar terdiri dari sampah dari output daya, kecepatan angin atau kecepatan pembangkit diplot terhadap parameter CM pilihan. Pendekatan lurus ke depan ini bisa sangat kuat dalam mendeteksi kesalahan dari data CM. Terjadinya kesalahan dapat diamati oleh miscorrelations antara variabel binned dan parameter CM masing di jendela operasi yang berbeda [8]. Ara. 8 menunjukkan dua korelasi yang berbeda untuk parameter CM untuk gearbox WT selama operasi normal dan seminggu sebelum kegagalan. Di
Ara. 8 (a) kurva daya untuk dua kondisi operasi tidak memberikan indikasi yang jelas dari kegagalan. Hal ini semakin memperkuat argumen dalam Bagian 2 bahwa kurva daya merupakan indikator lagging kesalahan gearbox (lihat Gambar. 3). Namun, ini tidak berarti bahwa kurva daya tidak dapat digunakan untuk memantau kesehatan komponen turbin angin lainnya seperti generator seperti yang telah ditunjukkan dalam literatur [sebesar 35,40].
Hal ini jelas dari Gambar. 8 (b) bahwa miscorrelation jelas dapat diamati ketika plot pencar direproduksi untuk kekuatan terhadap RMS getaran. Ini berjalan seiring dengan argumen oleh Ref. [10] bahwa terjadinya beberapa jenis kegagalan gearbox (dalam kasus Gambar. 8, bantalan pitting kegagalan) akan menyebabkan peningkatan substansial dalam tingkat gearbox getaran dan karenanya RMS mereka nilai. Ini adalah cara yang baik untuk mendeteksi kegagalan tapi tantangannya adalah bahwa menunggu untuk melihat tingkat ini miscorrelation mungkin terlambat maka ada kebutuhan untuk dapat menilai keparahan kegagalan. Upaya untuk mendeteksi kegagalan keparahan telah dibuat dalam literatur terbaru [8], di mana CM crite-rion dikembangkan untuk mengukur tingkat keparahan ini diberikan oleh persamaan:
Zxmin j¼0
aj
bj xj dx
xmax
Xk
c (1)
¼ xmax xmin
di mana a dan b adalah koefisien masing-masing dari polinomial berasal dari data saat ini dan sejarah, k adalah tingkat polinomial dan Xmax dan xmin adalah maksimum masing-masing dan

Ara. 8. Miscorrelation antara operasi normal dan periode kegagalan dari WT HS gearbox bearing ( a) kurva daya dan ( b ) kekuasaan vs


J. Igba et al. / Energi Terbarukan 91 (2016) 90e106 97
Ara. 9. ( a) Plot Gumbel probabilitas getaran puncak ; ( B ) plot pencar getaran puncak .
Ara. 10. Gumbel plot probabilitas getaran puncak e ( a) 0 % E25 % dinilai kekuasaan ; ( B ) 25 % e60 % dinilai kekuasaan ; ( C ) 75 % e100 % dinilai kekuasaan ; ( D ) un - binned sampel getaran puncak untuk 75 % e100 %
getaran untuk data CM satu minggu sebelum kegagalan . Membandingkan ini masing-masing dengan Gambar . 9 ( b ) dan 10 ( c ) untuk periode operasi normal, bisa bahwa tidak hanya getaran puncak untuk setiap sampah daya jauh lebih tinggi daripada yang untuk operasi normal , lokasi dan skala parameter juga lebih besar ( lihat Tabel 1 ) . Dalam contoh ini lokasi dan parameter skala hanya mampu menunjukkan perbedaan
getaran puncak kedua jendela opera - nasional karena
mereka dapat dibandingkan secara retrospektif . Namun, ketika WT baru saja diinstal dengan sedikit operasionalsejarah atau ketika hanya sebuah snapshot dari satu jendela operasional ada, tidak mungkin untuk mengetahui apakah getaran yang ekstrim dengan hanya mengukur parameter lokasi dan skala . Akibatnya , model telah berkembang secara empiris dari data CM dari WTS operasional dan juga dengan teknik pas kurva untuk mendeteksi extremeness getaran untuk setiap jendela waktu tertentu . Dua pengamatan utama telah dibuat secara empiris dari mempelajari RMS dan puncak plot vi - bration gearbox sehat .

98 J. Igba et al. / Energi Terbarukan 91 (2016) 90e106
Ara. 11. Puncak getaran untuk gearbox rusak ( a) plot pencar ; ( B ) Plot Gumbel probabilitas 75% e100 % dinilai listrik .
Tabel 1
Ringkasan dari parameter distribusi Gumbel .
Operational window Location parameter Scale parameter
Normal operation 40.41 0.4398One week to failure 250.7 6.822
Pertama, untuk gearbox sehat plot pencar dari nilai-nilai RMS getaran dari 75% menjadi 100% dinilai listrik umumnya mengikuti garis lurus atau kurva lembut dan mencapai maksimum pada nilai daya (misalnya lihat Gambar. 8 (b) dan 14 (Sebuah)). Kedua, plot pencar dari getaran puncak untuk gearbox sehat adalah dekat steady state dari 75% menjadi 100% nilai daya. Secara umum, gearbox rusak tidak akan mematuhi setidaknya salah satu dari dua aturan ini seperti dapat dilihat pada Gambar. 8 (b) di mana RMS getaran tidak mengikuti garis lurus selama seminggu sebelum kegagalan, dan pada Gambar. 11 (a) di mana getaran puncak tidak dekat steady state menjadi-tween 75% untuk nilai daya. Oleh karena itu jika plot regresi dalam tiga dimensi dilakukan untuk tenaga vs RMS vs puncak vi-brations, akan ada perbedaan yang jelas antara gearbox sehat dan rusak. Ara. 12 (a) dan (b) menunjukkan plot diproduksi untuk dua kasus menggunakan pra-diproses CM data. Sumbu x adalah output daya, sumbu y adalah nilai RMS dari sinyal getaran dan
Dimensi ketiga ( warna skala ) adalah untuk getaran puncak . Hal ini dapat dilihat bahwa skala warna , yang mengukur intensitas getaran puncak menunjukkan bahwa untuk gearbox sehat getaran puncak antara 75 % dan 100 dinilai % kekuasaan dekat steady state , maka warna biru gelap, yang konsisten untuk seluruh orang daya bin ( Gambar . 12 ( a) ) . Juga kekuatan vs RMS untuk operasi normal mengikuti garis lurus .
Namun, untuk gearbox rusak dua hubungan ini tidak tahan ( Gambar . 12 ( b ) ) . Akibatnya sumbu warna menunjukkan lebih tinggi vibra - tions yang menyimpang dari steady state maka ketidakkonsistenan dari nilai puncak ( nuansa warna ) di seluruh bin listrik , dan plot pencar lebih acak dari linear atau miring lembut . Pendekatan pas kurva ini bergantung pada bentuk yang melekat pada polinomial Gener - diciptakan dari plot pencar dari RMS dan getaran puncak . pendekatan baru ini ( menggunakan teori nilai ekstrim dan puncak / RMS / power regresi output warna plot) memberikan indikasi yang baik dari kehadiran kesalahan dalam gearbox . Contoh bagaimana ia digunakan untuk mendeteksi mode kegagalan yang berbeda disajikan pada bagian hasil . Sub - bagian berikutnya menyajikan model lain yang dapat digunakan untuk menentukan keparahan kesalahan sekali terdeteksi .
3.4 Intensitas deviasi RMS
Model ini didasarkan pada hubungan antara dua nilai RMS consec - utive . Sebuah parameter yang disebut " delta RMS " , yang merupakan


Perbedaan antara dua nilai RMS berturut-turut , digunakan untuk memperkirakan tren sinyal getaran . parameter yang dapat diperkirakan dengan menggunakan persamaan :
n 1X
(3)DRMS ¼ ½RMSiþ1 RMSi&i 1
¼Asumsi balik parameter ini adalah bahwa e jika kerusakan gigi terjadi, akan ada peningkatan lebih cepat di tingkat getaran dari dalam kasus tanpa kerusakan [10]. Salah satu kelemahan dari metode ini adalah bahwa parameter ini sangat sensitif terhadap perubahan beban [10]. Oleh karena itu sangat tidak cocok untuk menetapkan tingkat alarm. Namun, hal itu dapat digunakan dengan teknik lain seperti korelasi sinyal, untuk menilai tingkat keparahan kerusakan gearbox. Hal ini ditunjukkan pada Gambar. 13 (a) e (d), yang masing-masing delta RMS plot untuk 1 tahun, 6 bulan, 1 bulan dan 1 minggu sebelum kegagalan terjadi. Pola delta RMS petak pada Gambar. 13 (a) dan (b) biasanya diamati ketika gearbox sehat (periode operasi normal), sedangkan pola pada Gambar. 13 (c) dan (d) biasanya diamati pada memimpin hingga kegagalan. Dalam kasus Gambar. 13 (d) kegagalan itu telah berkembang ke tahap yang lebih parah. Sehingga memberikan gambaran tentang bagaimana delta RMS bervariasi dari waktu ke waktu akan memberikan gambaran tentang tingkat keparahan kegagalan jika indikator lain menunjukkan adanya kesalahan. Ini adalah pendekatan kualitatif dan harus digunakan dengan hati-hati dan dengan penilaian ahli.
4. Hasil dan diskusi Bagian ini menyajikan hasil yang diperoleh setelah menerapkan model pendekatan disajikan dalam bagian sebelumnya ke WT nyata
Data CM untuk mendeteksi kesalahan dalam modul HS gearbox di WTS operasional . Juga studi kasus pada mendeteksi beberapa mode kegagalan dalam modul HS disajikan dalam bagian ini . Alasan mengapa modul HS telah dipilih untuk validasi adalah sebagai berikut :
Modul HS dianggap terpercaya bagian paling gearbox , dengan HS bantalan kegagalan mendominasi kegagalan gearbox [ 6,45,46 ] .
Banyak desain WT modern yang memungkinkan perbaikan dan penggantian modul HS up - menara , menghilangkan kebutuhan untuk crane eksternal [ 6,46 ] .
Ini berarti bahwa jika kegagalan dalam tahap HS dapat dideteksi cukup dini , O & M manajer akan memiliki cukup waktu untuk merencanakan up - menara perbaikan , karena itu memungkinkan mereka untuk mengurangi downtime , alat berat dan biaya logistik , dan dalam mencegah kegagalan conse - quential di seluruh gearbox
.
4.1 . Sehat vs rusak WT Pertama , sebelum menunjukkan bagaimana metode yang berbeda telah digunakan untuk mendeteksi modus kegagalan yang berbeda , perbandingan setiap metode untuk dua WTS identik di WF sama dilakukan . Hal ini untuk memberikan rasa bagaimana tiga metode dapat digunakan dalam konteks gearbox CM WF . WTS , masing-masing ditunjuk sebagai WTG1 dan WTG2 untuk sehat dan rusak , ditugaskan pada hari yang sama dan operasional selama sekitar tiga tahun sebelum WTG2 mengalami keruntuhan gearbox HS . Oleh karena itu , ini membuat

Ara. 13. Delta RMS plot ( a) operasi normal ; ( B ) 6 bulan sebelum kegagalan ; ( C ) 1 bulan sebelum kegagalan ; ( D ) 1 minggu sebelum kegagalan .
100 J. Igba et al. / Energi Terbarukan 91 (2016) 90e106

Membandingkan mereka calon yang baik untuk tiga metode dengan menggunakan CM data untuk periode waktu yang mendahului kegagalan WTG2 . WTG2 WTS adalah sama digunakan untuk menggambarkan keterbatasan pendekatan diketahui dari literatur dalam Bagian 2 (lihat Gambar . 4 dan 5 ) .
4.1.1. korelasi sinyal Data CM retrospektif untuk kedua WTG1 dan WTG2 dari seminggu sebelum tanggal kegagalan WTG2 tahun mundur dimodelkan menggunakan algoritma korelasi sinyal. Hasil correla-tions untuk output daya dan nilai-nilai RMS dari HS bantalan vi-brations untuk kedua WTS ditunjukkan masing-masing pada Gambar. 14 (a) dan (b). Untuk WTG1 dapat dilihat bahwa tidak ada miscorrelations dalam RMS getaran bantalan HS. Namun, untuk WTG 2 ada miscorrelations sangat jelas dalam HS bantalan getaran dalam jangka-up untuk kegagalan. Selain itu, ada ditandai perbedaan antara miscorrelations selama enam bulan, satu bulan dan seminggu sebelum kegagalan. Hal ini menunjukkan bahwa korelasi dari RMS dengan output daya memberikan indikasi awal sebelum kegagalan terjadi.
4.1.2. getaran ekstrim Sekali lagi data pra-diproses CM untuk kedua WTG1 dan WTG2 dipaskan dengan distribusi Gumbel untuk menguji goodness of fit dan juga untuk menentukan parameter distribusi e Gambar. 15 (a) dan (b) masing-masing. Hal ini dapat dilihat bahwa hanya seperti yang diharapkan P-nilai dan koefisien AD adalah masing-masing lebih besar dari 0,05 dan kurang dari 1. Hal ini memperkuat temuan dari Bagian 3.3. Selanjutnya, dengan menggunakan kurva Matlab toolbox pas untuk menghasilkan plot getaran ekstrim untuk kedua WTS selama menjelang kegagalan WTG2 hasilnya ditunjukkan pada Gambar. 16. Sekali lagi, seperti yang diharapkan, plot warna regresi 3D untuk WTG1 dan WTG2 setuju dengan pengamatan empiris yang masing-masing menunjukkan WT sehat dan rusak. Dalam WTG2 yang vibra-tions di 75% e100% dinilai listrik mengikuti garis lurus dan getaran puncak yang dekat steady state.
4.1.3. intensitas RMS Menerapkan delta Model RMS data CM untuk WTG1 dan WTG2 dalam jangka-up untuk kegagalan memberikan indikasi tingkat keparahan kegagalan. Plot delta RMS untuk WTG1 dan WTG2 ditunjukkan pada Gambar. 17 (a) dan (b) masing-masing. Hal ini dapat dilihat bahwa meskipun pola yang jelas yang muncul untuk RMS delta WTG2, menunjukkan bahwa nilai-nilai RMS meningkat pada tingkat yang lebih cepat daripada di WTG1. Ini bersama-sama dengan salah satu dari dua model sebelumnya dapat digunakan untuk mengkonfirmasi terjadinya dan menilai keparahan kesalahan.
4.2 . mode kegagalan modul HS studi kasus Bagian sebelumnya telah menunjukkan bagaimana ketiga model ap - proaches dapat digunakan untuk CM dengan membandingkan sehat dengan WT rusak Namun , juga penting untuk menilai seberapa baik masing-masing teknik tidak dalam mendeteksi beberapa mode kegagalan umum dan kerusakan terlihat di modul HS .
Mode kegagalan / kerusakan tercakup dalam studi kasus ini adalah : HS bantalan e retak Hairline , spalling dan pitting . HS gigi gigi e retak dan patah . HS poros e retak .
4.2.1. HS bantalan retak rambut, spalling dan pitting
Dalam contoh ini, data CM retrospektif dari tiga WTS telah digunakan untuk menggambarkan bagaimana teknik pemodelan memberikan tanda-tanda peringatan dini dari kegagalan bantalan umum. Turbin angin dan kegagalan masing-masing di bantalan HS mereka diberikan dalam Tabel 2.
.Perlu dicatat bahwa WTG4 adalah WT sama digunakan sebagai contoh turbin yang rusak untuk menggambarkan tren dari tetangga turbin dalam Bagian 2 (lihat Gambar. 1E3) dan WT yang sama digunakan untuk mengembangkan model dalam Bagian 3. Gambar. 18 (a) e (c) masing-masing menunjukkan plot pencar dari getaran dan daya output korelasi untuk WTG3, WTG4 dan WTG5. Hal ini dapat dilihat bahwa ada salah korelasi antara getaran dan kekuatan plot dalam jangka-up untuk kegagalan bantalan. Juga tingkat miscorrelations dur-ing periode "satu minggu sebelum kegagalan" sangat tinggi.
Tidak seperti untuk WTG2 (Gambar. 14 (b)), tidak ada miscorrelations jelas enam bulan sebelum kegagalan untuk WTGs 3, 4, dan 5, dan hanya sedikit miscorrelation satu bulan sebelum kegagalan. Ini bukan karena jenis modus kegagalan. Hal ini agak karena lokasi kegagalan. Dalam tiga contoh, kegagalan terjadi di HS pembangkit akhir bantalan sementara di WTG2 kegagalan terjadi di poros HS. Implikasinya adalah bahwa meskipun getaran bantalan sedang dipantau untuk kedua kasus, akan ada peningkatan yang ditandai dalam getaran ketika ada sesuatu yang salah dengan poros. Misalnya, kegagalan poros dapat merupakan gejala dari misalignment di drivetrain dan ini akan mudah ditangkap oleh miscorrelations tinggi sangat awal sebelum fraktur poros terjadi. Sekali lagi, data CM dari WTG3, WTG4 dan WTG5 dimodelkan untuk getaran ekstrim dan variasi parameter RMS delta selama seminggu sebelum kegagalan. Ini ditunjukkan masing-masing untuk WTG3 dan WTG5 pada Gambar. 19 (a) e (d). Seperti yang disebutkan sebelumnya ekstrim getaran dan delta RMS plot untuk WTG4 dapat ditemukan pada Gambar. 12 (b) dan 13 (d) masing-masing.
Fig. 14. plot pencar kekuasaan terhadap getaran (a) WTG1; (b) WTG

J. Igba et al. / Energi Terbarukan 91 (2016) 90e106 101
Fig. 15. plot probabilitas Gumbel pada 75 % e100 % dinilai listrik (a) WTG1; (b) WTG2.
Ara. 16. plot Warna kekuasaan terhadap RMS dan getaran puncak ( a) WTG1 ; ( B ) WTG2 . ( Untuk interpretasi referensi untuk warna dalam legenda angka ini , pembaca disebut versi web artikel ini . )
Dari semua plot dapat diamati bahwa ketiga WTS menunjukkan gejala getaran ekstrim dalam jangka-up untuk kegagalan. Juga dari plot delta RMS, dapat dilihat bahwa WTG3 dan WTG4 pameran pola yang sama dan menampilkan lebih parahnya daripada WTG5. Hal ini secara luas diharapkan karena mereka berdua memiliki retak rambut dan kehadiran retak rambut di bantalan dapat menyebabkan tingkat getaran yang lebih besar sebagai retak tumbuh. plot ini juga menunjukkan bahwa konsekuensial yang dihasilkan dari kegagalan tersebut dapat dihindari karena plot memberikan indikasi insiden parah potensi seminggu sebelum kegagalan terjadi.
4.2.2. HS fraktur gigi gigi
Mengulangi proses yang sama diterapkan untuk bantalan contoh HS di WT lain yang memiliki HS pinion retak (ditunjuk sebagai WTG6), plot masing-masing ditunjukkan pada Gambar. 20 (a) e (d). Pada pandangan pertama Gambar. 20 (a), dapat dilihat bahwa ada sedikit atau tidak ada mis-korelasi antara output daya dan plot getaran dalam jangka-up untuk kegagalan. Ini adalah salah satu keterbatasan menggunakan nilai RMS getaran, sebagaimana tercantum dalam Pasal 3.
nilai RMS tidak sensitif terhadap ledakan singkat dalam getaran yang dihasilkan dari satu gigi bersentuhan sekali dalam revolusi roda gigi. Hal ini karena RMS adalah rata-rata dari sinyal getaran lebih satu revolusi poros. Namun, puncak getaran, yang merupakan getaran maksimum per putaran, akan terjadi ketika gigi retak datang ke dalam kontak sekali setiap
revolusi. Oleh karena itu pada Gambar. 20 (b) dapat dilihat bahwa ada miscorrelations jelas antara plot pencar dari puncak getaran dan output daya. Selanjutnya, setelah melihat lebih dekat, juga dapat diamati bahwa miscorrelations juga hanya terjadi setelah output daya 500 KW. Juga, ada gelar besar miscorrelation dari daya output> 1500 KW. Hal ini terkait dengan 75% e100% tingkat rentang daya yang digunakan untuk memodelkan getaran ekstrim, sehingga lebih memperkuat klaim dalam Bagian 3. Pada Gambar. 20 (c) dan (d) ekstrim getaran dan delta RMS plot satu minggu sebelum kegagalan yang ditampilkan lebih lanjut menunjukkan adanya kesalahan. Sangat menarik untuk dicatat bahwa meskipun tidak ada miscorrelations di RMS dan output daya plot, RMS delta plot jelas menunjukkan kesalahan dengan meningkatnya keparahan akan segera terjadi.
4.2.3. retak poros HS Proses yang sama kemudian diulang untuk WTG7 WT ditunjuk, yang mengalami patah tulang poros seperti WTG2. Ara. 21 (a) e (c) respec--masing menunjukkan pencar, getaran ekstrim dan delta RMS plot untuk WTG7.
Membandingkan Gambar. 21 (a) untuk WTG7 dengan Gambar. 14 (b) untuk WTG2, dapat dilihat bahwa ada banyak tanda awal dari miscorrelations sebelum kegagalan poros karena retak terjadi. Ini berarti bahwa RMS getaran sangat cocok untuk memantau kondisi poros HS. Membandingkan Gambar. 21 (b) dan (c) dengan Gambar. 16 (b) dan 17 (b) dapat dilihat bahwa WTG7 menunjukkan tanda kegagalan poros yang akan datang dengan lebih tinggi

102 J. Igba et al. / Energi Terbarukan 91 (2016) 90e106
Fig. 17. Delta RMS plots (a) WTG1; (b) WTG2.

Table 2HS bearing failure modes of WTs.
WT number Failure mode(s)
WTG3 Hairline cracksWTG4 Hairline cracks and spallingWTG5 Spalling and pitting
4.3 Aplikasi untuk perencanaan pemeliharaan melalui CBM
Seperti disebutkan sebelumnya dalam pendahuluan , penulis baru-baru ini diterapkan PM ke WT bantalan gearbox HS [ 6 ] . Ini adalah espe - cially cocok untuk WTS tanpa komersial CMS atau SCADA system yang terpasang pada mereka . Untuk WTS dengan CMS komersial, PM bisa

Fig. 18. Listrik dibandingkan RMS pencar plot (a)WTG5.

keparahan seperti WTG2 . Hal ini disebabkan oleh extremeness dari vi - brations ditunjukkan oleh plot warna , dan pola menunjukkan keparahan lebih tinggi dari kegagalan yang ditunjukkan oleh plot delta RMS .
masih bisa digunakan tapi lebih masuk akal untuk mengadopsi CBM , karena memberikan estimasi yang lebih tepat dari kesehatan komponen . Memiliki pemikiran ini , diskusi singkat tentang bagaimana teknik CM disajikan dalam

J. Igba et al. / Energi Terbarukan 91 (2016) 90e106 103
Ara. 19. ( a ) Power vs RMS dan puncak getaran WTG3 ; ( B ) Delta RMS WTG3 ; ( C ) kekuasaan terhadap RMS dan getaran puncak WTG5 ; ( D ) Delta RMS WTG5 .

artikel ini dapat digunakan untuk CBM dari gearbox WT dilakukan di bagian ini . Dalam CMS komersial khas diinstal pada WTS , CBM dapat dicapai dengan menggunakan alarm untuk sinyal terjadinya dan dalam beberapa kasus, severities , dari kesalahan . tingkat alarm atau ambang yang ditetapkan untuk setiap atau kombinasi dari parameter dipantau berdasarkan aturan pra - jelaskan . Ketika tingkat alarm melebihi ambang batas yang telah ditentukan , WT akan ditutup untuk menghindari bencana / kegagalan konsekuensial memberikan WF pemilik waktu untuk merencanakan untuk pemeliharaan . Dalam konteks artikel ini , empat langkah telah digunakan sebagai kriteria CM ketika diterapkan pada data model . Mereka,
Berarti kesalahan persegi ( MSE ) , Dijelaskan varians ( EV ) ,
Berarti kesalahan mutlak ( MEA ) , dan
Kriteria c diusulkan oleh Ref . [ 8 ] .
Aturan untuk menentukan adanya kesalahan untuk mea - sures diberikan dalam Tabel 3 . Langkah-langkah ini semua mengukur deviasi dari sampel CM data dari sampel referensi yang telah dimodelkan dari data CM yang diperoleh selama kondisi operasi normal. nilai estimasi dari masing-masing langkah-langkah ini untuk WTG1eWTG7 dan delapan WTS lainnya ditunjukkan pada Tabel 4. ini telah diperkirakan selama operasi normal dan satu minggu sebelum kegagalan sehingga dapat memberikan rasa bagaimana langkah-langkah ini dapat digunakan dalam praktek untuk CBM . Dari Tabel 4 kesimpulan berikut dapat dilakukan :
Aturan untuk review menentukan adanya Kesalahan untuk review mea - langkah- diberikan hearts Tabel 3 .
Langkah - Langkah Penyanyi SEMUA mengukur deviasi Dari sampel CM Data Dari sampel Referensi Yang has dimodelkan Dari data yang CM Yang TIMAH selama Kondisi Operasi normal.
Nilai estimasi Dari masing - masing Langkah - Langkah Penyanyi untuk review WTG1eWTG7 Dan Delapan WTS lainnya ditunjukkan PADA Tabel 4. Penyanyi has diperkirakan selama Operasi yang normal Dan Satu minggu SEBELUM Kegagalan sehingga can be memberikan rasa bagaimana Langkah - Langkah Penyanyi can be digunakan hearts Praktek untuk review CBM .
Dari Tabel 4 KESIMPULAN berikut can be dilakukan :

Fig. 20. Plots for WTG6 (a) power versus RMS; (b) power versus peak vibrations; (c) power versus RMS and peak vibrations; (d) Delta RMS.
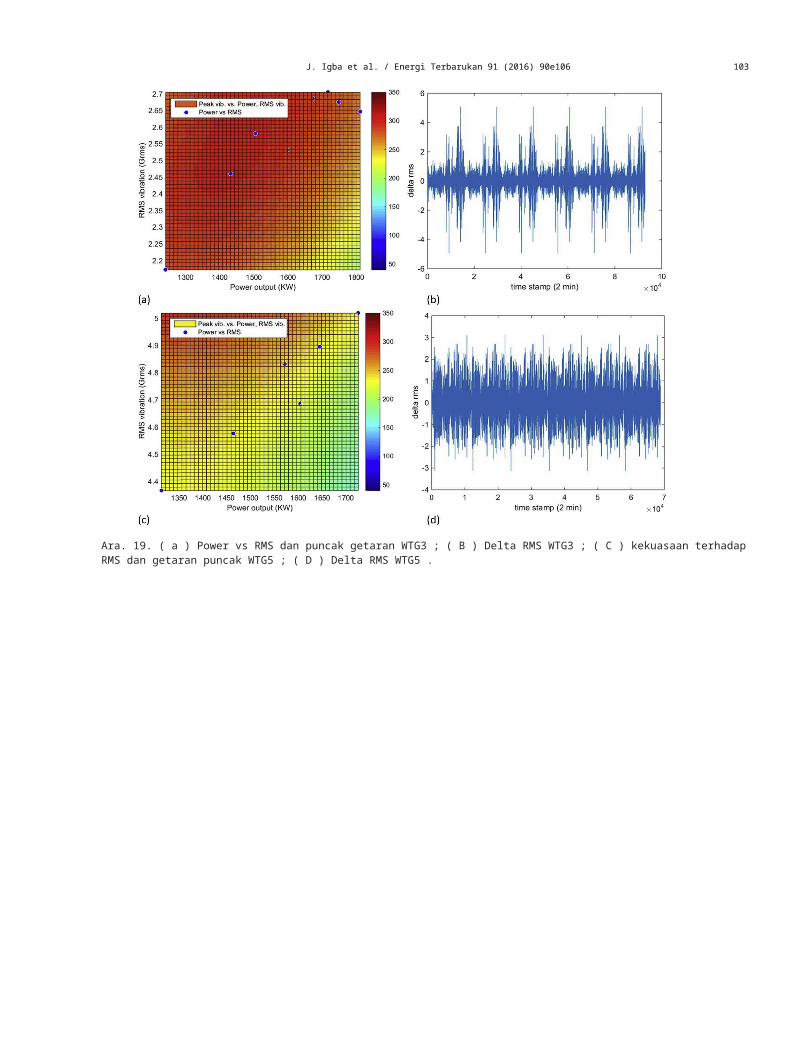
Fig. 21. Plots for WTG7 (a) power versus RMS; (b) power versus RMS and peak vibrations; (c) delta RMS.

J. Igba et al. / Energi Terbarukan 91 (2016) 90e106 105

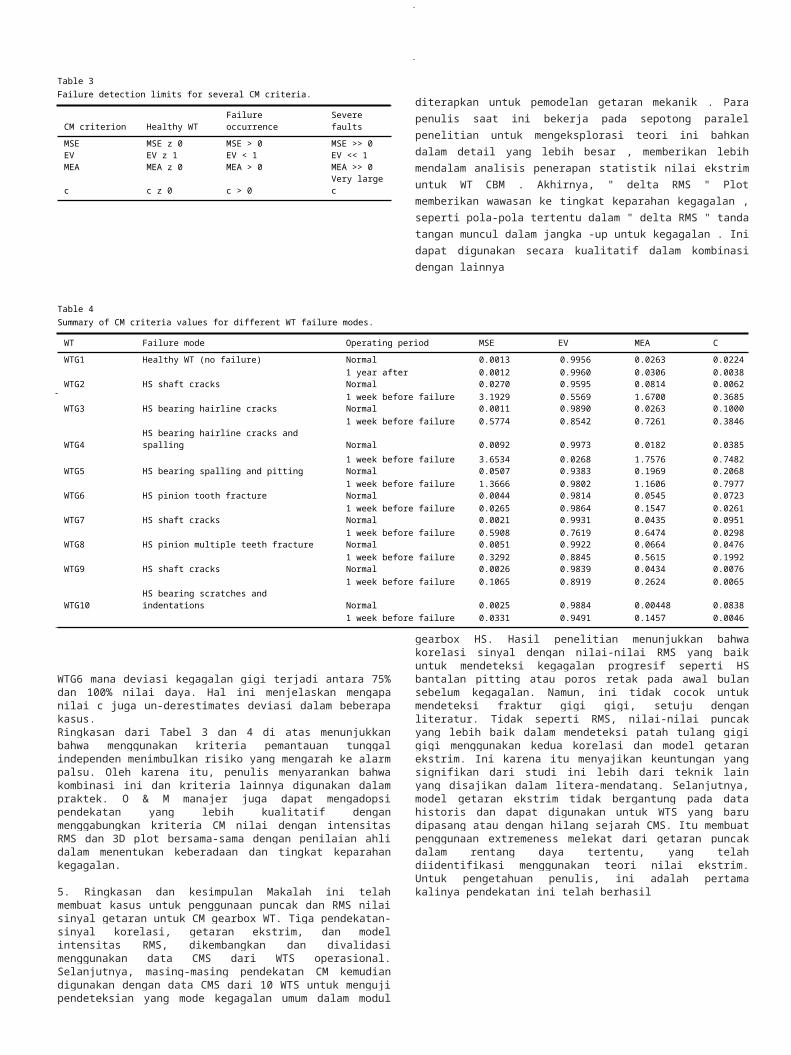
Table 3Failure detection limits for several CM criteria.
CM criterion Healthy WT Failure occurrence Severe faults
MSE MSE z 0 MSE > 0 MSE >> 0EV EV z 1 EV < 1 EV << 1MEA MEA z 0 MEA > 0 MEA >> 0c c z 0 c > 0 Very large c
diterapkan untuk pemodelan getaran mekanik . Para penulis saat ini bekerja pada sepotong paralel penelitian untuk mengeksplorasi teori ini bahkan dalam detail yang lebih besar , memberikan lebih mendalam analisis penerapan statistik nilai ekstrim untuk WT CBM . Akhirnya, " delta RMS " Plot memberikan wawasan ke tingkat keparahan kegagalan , seperti pola-pola tertentu dalam " delta RMS " tanda tangan muncul dalam jangka -up untuk kegagalan . Ini dapat digunakan secara kualitatif dalam kombinasi dengan lainnya
Table 4Summary of CM criteria values for different WT failure modes.
WT Failure mode Operating period MSE EV MEA C
WTG1 Healthy WT (no failure) Normal 0.0013 0.9956 0.0263 0.02241 year after 0.0012 0.9960 0.0306 0.0038
WTG2 HS shaft cracks Normal 0.0270 0.9595 0.0814 0.00621 week before failure 3.1929 0.5569 1.6700 0.3685
WTG3 HS bearing hairline cracks Normal 0.0011 0.9890 0.0263 0.10001 week before failure 0.5774 0.8542 0.7261 0.3846
WTG4 HS bearing hairline cracks and spalling Normal 0.0092 0.9973 0.0182 0.03851 week before failure 3.6534 0.0268 1.7576 0.7482
WTG5 HS bearing spalling and pitting Normal 0.0507 0.9383 0.1969 0.20681 week before failure 1.3666 0.9802 1.1606 0.7977
WTG6 HS pinion tooth fracture Normal 0.0044 0.9814 0.0545 0.07231 week before failure 0.0265 0.9864 0.1547 0.0261
WTG7 HS shaft cracks Normal 0.0021 0.9931 0.0435 0.09511 week before failure 0.5908 0.7619 0.6474 0.0298
WTG8 HS pinion multiple teeth fracture Normal 0.0051 0.9922 0.0664 0.04761 week before failure 0.3292 0.8845 0.5615 0.1992
WTG9 HS shaft cracks Normal 0.0026 0.9839 0.0434 0.00761 week before failure 0.1065 0.8919 0.2624 0.0065
WTG10 HS bearing scratches and indentations Normal 0.0025 0.9884 0.00448 0.08381 week before failure 0.0331 0.9491 0.1457 0.0046
WTG6 mana deviasi kegagalan gigi terjadi antara 75% dan 100% nilai daya. Hal ini menjelaskan mengapa nilai c juga un-derestimates deviasi dalam beberapa kasus. Ringkasan dari Tabel 3 dan 4 di atas menunjukkan bahwa menggunakan kriteria pemantauan tunggal independen menimbulkan risiko yang mengarah ke alarm palsu. Oleh karena itu, penulis menyarankan bahwa kombinasi ini dan kriteria lainnya digunakan dalam praktek. O & M manajer juga dapat mengadopsi pendekatan yang lebih kualitatif dengan menggabungkan kriteria CM nilai dengan intensitas RMS dan 3D plot bersama-sama dengan penilaian ahli dalam menentukan keberadaan dan tingkat keparahan kegagalan.
5. Ringkasan dan kesimpulan Makalah ini telah membuat kasus untuk penggunaan puncak dan RMS nilai sinyal getaran untuk CM gearbox WT. Tiga pendekatan-sinyal korelasi, getaran ekstrim, dan model intensitas RMS, dikembangkan dan divalidasi menggunakan data CMS dari WTS operasional. Selanjutnya, masing-masing pendekatan CM kemudian digunakan dengan data CMS dari 10 WTS untuk menguji pendeteksian yang mode kegagalan umum dalam modul gearbox HS. Hasil penelitian menunjukkan bahwa korelasi sinyal dengan nilai-nilai RMS yang baik untuk mendeteksi kegagalan progresif seperti HS bantalan pitting atau poros retak pada awal bulan sebelum kegagalan. Namun, ini tidak cocok untuk mendeteksi fraktur gigi gigi, setuju dengan literatur. Tidak seperti RMS, nilai-nilai puncak yang lebih baik dalam mendeteksi patah tulang gigi gigi menggunakan kedua korelasi dan model getaran ekstrim. Ini karena itu menyajikan keuntungan yang signifikan dari studi ini lebih dari teknik lain yang disajikan dalam litera-mendatang. Selanjutnya, model getaran ekstrim tidak bergantung pada data historis dan dapat digunakan untuk WTS yang baru dipasang atau dengan hilang sejarah CMS. Itu membuat penggunaan extremeness melekat dari getaran puncak dalam rentang daya tertentu, yang telah diidentifikasi menggunakan teori nilai ekstrim. Untuk pengetahuan penulis, ini adalah pertama kalinya pendekatan ini telah berhasil
model dan dengan wawasan dari para ahli gearbox . Bertentangan dengan klaim dalam literatur , telah menunjukkan bahwa
RMS dan nilai puncak adalah indikator yang baik dari kesehatan gearbox jika digunakan dengan benar . teknik ini bukan tanpa keterbatasan meskipun, salah satunya adalah bahwa perubahan dalam RMS getaran hanya sensitif terhadap revolusi poros tinggi . Oleh karena itu, hanya akan cocok untuk memantau kecepatan tinggi dan kecepatan menengah modul gearbox , yang memiliki revolusi poros lebih tinggi dari modul lainnya . Juga , data CM yang digunakan dalam penelitian ini telah dari dipantau modul kecepatan tinggi gearbox .
Ucapan Terima Kasih Karya ini didukung oleh EPSRC didanai Industri Doktor Centre di Sistem , University of Bristol dan University of Bath (Grant EP / G037353 / 1 ) dan Perusahaan -sponsor Vestas Wind Systems A / S .
Referensi

[1] Y. Feng, Y. Qiu, C. Crabtree, H. Long, P. Tavner, Monitoring wind turbine gearboxes, Wind Energy 16 (2013) 728e740.
[2] P.J. Tavner, D.M. Greenwood, M.W.G. Whittle, R. Gindele, S. Faulstich, B. Hahn, Study of weather and location effects on wind turbine, Wind Energy 16 (2013) 175e187.
[3] W. Yang, P. Tavner, C. Crabtree, Y. Feng, Y. Qiu, Wind turbine condition monitoring: technical and commercial challenges, Wind Energy 17 (2012) 673e693.
[4] T. Jin, Y. Ding, H. Guo, N. Nalajala, Managing wind turbine reliability and maintenance via performance-based contract, Power Energy Soc. (2012) 1e6.
[5] J. Igba, K. Alemzadeh, C. Durugbo, K. Henningsen, Through-life engineering services: a wind turbine perspective, Procedia CIRP 22 (2014) 213e218.
[6] J. Igba, K. Alemzadeh, K. Henningsen, C. Durugbo, Effect of preventive main- tenance intervals on reliability and maintenance costs of wind turbine gear- boxes, Wind Energy 18 (11) (November 2015) 2013e2024.
[7] J.L. Godwin, P. Matthews, Prognosis of wind turbine gearbox failures by uti- lising robust multivariate statistical techniques, in: 2013 IEEE Conference on Prognostics and Health Management (PHM), 2013, pp. 1e8.

106 J. Igba et al. / Renewable Energy 91 (2016) 90e106
[8] W. Yang, R. Court, J. Jiang, Wind turbine condition monitoring by the approach of SCADA data analysis, Renew. Energy 53 (2013) 365e376.
[9] P. Guo, N. Bai, Wind turbine gearbox condition monitoring with AAKR and moving window statistic methods, Energies 4 (2011) 2077e2093.
[10] P. Vecer, M. Kreidl, R. Smíd, Condition indicators for gearbox condition monitoring systems, Acta Polytech. 45 (2005) 35e43.
[11] J. Sheldon, G. Mott, H. Lee, M. Watson, Robust wind turbine gearbox fault detection, Wind Energy 17 (2013) 745e755.
[12] J. Wang, R. Gao, R. Yan, Integration of EEMD and ICA for wind turbine gearbox diagnosis, Wind Energy 17 (2013) 757e773.
[13] J. Wang, R.X. Gao, R. Yan, L. Wang, An integrative computational method for gearbox diagnosis, Procedia CIRP 12 (2013) 133e138.
[14] B. Tang, T. Song, F. Li, L. Deng, Fault diagnosis for a wind turbine transmission system based on manifold learning and Shannon wavelet support vector machine, Renew. Energy 62 (2014) 1e9.
[15] M. Wilkinson, P. Tavner, Extracting condition monitoring information from a wind turbine drive train, in: Universities Power Engineering Conference, 2004, pp. 591e594.
[16] Z. Hameed, Y.S. Hong, Y.M. Cho, S.H. Ahn, C.K. Song, Condition monitoring and fault detection of wind turbines and related algorithms: a review, Renew. Sustain. Energy Rev. 13 (2009) 1e39.
[17] S. Soua, P. Van Lieshout, A. Perera, T.-H. Gan, B. Bridge, Determination of the combined vibrational and acoustic emission signature of a wind turbine gearbox and generator shaft in service as a pre-requisite for effective condi- tion monitoring, Renew. Energy 51 (2013) 175e181.
[18] A. Kusiak, A. Verma, Analyzing bearing faults in wind turbines: a data-mining approach, Renew. Energy 48 (2012) 110e116.
[19] A. Kusiak, W. Li, The prediction and diagnosis of wind turbine faults, Renew. Energy 36 (2011) 16e23.
[20] K. Kim, G. Parthasarathy, O. Uluyol, W. Foslien, Use of SCADA Data for Failure Detection in Wind Turbines, NREL, 2011.
[21] Y. Wang, D. In fi eld, Supervisory control and data acquisition data-based non- linear state estimation technique for wind turbine gearbox condition moni- toring, IET Renew. Power Gener. 7 (2012) 350e358.
[22] Y. Qiu, Y. Feng, P. Tavner, P. Richardson, Wind turbine SCADA alarm analysis for improving reliability, Wind Energy 15 (2012) 951e966.
[23] Y. Feng, Y. Qiu, C. Crabtree, H. Long, P. Tavner, Use of SCADA and CMS signals for failure detection and diagnosis of a wind turbine gearbox, in: EWEA, Brussels, 2011.
[24] M. Schlechtingen, I.F. Santos, S. Achiche, Wind turbine condition monitoring based on SCADA data using normal behavior models. Part 1: System description, Appl. Soft Comput. 13 (2013) 259e270.
[25] A.R. Nejad, P.F. Odgaard, Z. Gao, T. Moan, A prognostic method for fault detection in wind turbine drivetrains, Eng. Fail. Anal. 42 (2014) 324e336.
[26] C.J. Crabtree, P.J. Tavner, Condition monitoring algorithm suitable for wind turbine use, in: IET Conference on Renewable Power Generation (RPG 2011), IET, Edinburgh, 2011, 162e162.
[27] W. Yang, P. Tavner, Cost-effective condition monitoring for wind turbines, IEEE Trans. Ind. Electron. 57 (2010) 263e271.
[28] H. Luo, C. Hatch, M. Kalb, J. Hanna, Effective and accurate approaches for wind turbine gearbox condition monitoring, Wind Energy 17 (2013) 715e728.
[29] M. Nie, L. Wang, Review of condition monitoring and fault diagnosis tech- nologies for wind turbine gearbox, Procedia CIRP 11 (2013) 287e290.
[30] F.P. García Marquez, A.M. Tobias, J.M. Pinar Perez, M. Papaelias, Condition monitoring of wind turbines: techniques and methods, Renew. Energy 46 (2012) 169e178.
[31] M. Wilkinson, B. Darnell, Comparison of methods for wind turbine condition monitoring with SCADA data, in: EWEA 2013, Vienna, 2013.
[32] P. Dempsey, S. Sheng, Investigation of data fusion applied to health moni- toring of wind turbine drivetrain components, Wind Energy 16 (2013) 479e489.
[33] J. Morren, J.T.G. Pierik, S.W.H. De Haan, J. Bozelie, Grid interaction of offshore wind farms. Part 1. Models for dynamic simulation, Wind Energy 8 (2005) 265e278.
[34] W. Yang, R. Court, Experimental study on the optimum time for conducting bearing maintenance, Measurement 46 (2013) 2781e2791.
[35] A. Kusiak, A. Verma, Monitoring wind farms with performance curves, IEEE Trans. Sustain. Energy 4 (2013) 192e199.
[36] J. Zhu, T. Nostrand, C. Spiegel, B. Morton, Survey of condition indicators for condition monitoring systems, in: Annual Conference of the Prognostics and Health Management Society 2013, Fort Worth Texas, 2014, pp. 1e13.
[37] F. Oyague, D. Gorman, S. Sheng, NREL gearbox reliability collaborative experimental data overview and analysis, in: Windpower Conference and Exhibition, Dallas, 2010.
[38] S. Sheng, Wind Turbine Gearbox Condition Monitoring Round Robin Study e Vibration Analysis Wind Turbine Gearbox Condition Monitoring Round Robin Study e Vibration Analysis, Denver, 2012.
[39] K.E. Johnson, Adaptive Torque Control of Variable Speed Wind Turbines, Golden, CO, 2008.
[40] J. Li, X. Lei, H. Li, L. Ran, Normal behavior models for the condition assessment of wind turbine generator systems, Electr. Power Compon. Syst. 42 (2014) 1201e1212.
[41] P. Friederichs, T. Thorarinsdottir, Forecast veri fi cation for extreme value dis- tributions with an application to probabilistic peak wind prediction, Envi- ronmetrics 23 (2012) 579e594.
[42] S. Coles, An Introduction to Statistical Modeling of Extreme Values, Springer, London, 2001.
[43] E. Castillo, A.S. Hadi, N. Balakrishnan, J.M. Sarabia, Extreme Value and Related Models with Applications in Engineering and Science, Wiley Interscience, Hoboken, New Jersey, 2005.
[44] W.R. Rice, Analyzing tables of statistical tests, Evolution 43 (1989) 223 e225.[45] K. Smolders, H. Long, Y. Feng, P. Tavner, Reliability analysis and prediction of wind
turbine gearboxes, in: European Wind Energy Conference (EWEC 2010), 2010.
[46] K. Fischer, F. Besnard, L. Bertling, Reliability-centered maintenance for wind turbines based on statistical analysis and practical experience, IEEE Trans. Energy Convers. 27 (2012) 184e195.