08gnss student paper pejmank 25sep08
TRANSCRIPT

8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 1/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 1/10
Optimum Digital Filters for GNSS Tracking
Loops
Pejman L. Kazemi
Position, Location And Navigation (PLAN) Group
Department of Geomatics Engineering
University of Calgary
BIOGRAPHY
Pejman L. Kazemi is a Ph.D. student in the Department of
Geomatics Engineering at the University of Calgary. He
received his BSc in Electrical Engineering, majoring in
telecommunications from the Iran University of Scienceand Technology in 2006. His research interests are in
GNSS software receiver design, spread spectrum
communication and digital signal processing.
ABSTRACT
In a traditional loop filter the product between loop noise
bandwidth and integration time (BLT) should remain well
below unity in order to ensure the stability of the loop.This constraint, required for having a stable loop,
significantly limits the maximum integration time and/or noise bandwidth.
The current methodology in designing digital tracking
loop filters mostly relies on transforming a continuous-time system into a discrete-time one. This transform, from
the S-domain to Z-domain, is done by means of Laplace
to Z-domain mappings, such as the bilinear transform. In
these cases, the digital loops will be equivalent to its
analog counterpart only if BLT is close to zero (Stephens& Thomas 1995, Lindsey & Chie 1981). As the product
BLT increases, the effective loop noise bandwidth and
closed loop pole locations deviate from the desired onesand eventually the loop becomes unstable.
By designing filters with the controlled-root method the
deficiencies of the continuous-update approximation inlarge BLT applications are avoided (Stephens & Thomas
1995). However, by using this method for the
conventional NCOs (denoted as rate-only feedback NCOs
in Stephens & Thomas 1995) which are mostly used in
software receivers, the BLT is still limited to less than 0.4for third order loops.
In this paper, by considering the effect of integration anddump in the linear model of the digital phase-locked loop
and considering rate-only feedback NCOs, loop filters are
designed totally in the Z-domain by utilizing a method
that minimizes the loop phase jitter. It is shown that, by
using these new filters, a significant improvement for high BLT can be achieved, allowing one to operate in
ranges where previous methods can not operate. As a
result, stable loops with higher bandwidths and/or longer integration time can be easily designed. The deficiencies
of previous methods are analyzed and the loop instability
for large BLT is shown by employing live GPS signals.
New loop filters are implemented in a GPS softwarereceiver and their performance for large BLT evaluated by
using live GPS signals for static tests and hardware
simulated signals for dynamic tests.
INTRODUCTION
Phase-locked loops are widely used in modern
communication systems. As a result of the rapid evolutionof digital microelectronics technologies the current trend
is to implement and design phase-locked loops in the
digital domain. Especially for software receivers this is an
inevitable choice. Much research has been done in thisfield and an excellent survey of theoretical and
experimental works accomplished in this area up to 1981
can be found in (Lindsey & Chie 1981). Most research
focuses on different methods for the design of the phase
detector and very little effort has been spent on the designof loop filters.
Since theoretical and practical aspects of continuous phase-locked loops and their performance in different
situations is well known, the typical methodology in
designing digital loop filters is based on thetransformation from the analog domain (Gardner 2005,
Stephens 2001, Best 1999, Lindsey & Chie 1981). This
technique is widely used for GNSS signal tracking loops
(Ward et al 2006, Stephens 2001, Tsui 2000, Spilker
1997). In these methods, filters are first designed in the S-
8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 2/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 2/10
domain and then, for the digital implementation, they are
transformed into the Z-domain. Examples of analog todigital transformation methods are the bilinear, boxcar,
impulse invariant transforms. The necessary condition for
these filters to resemble their analog counterparts is tohave a BLT near zero (Lindsey & Chie 1981). As this
product increases the filter zeros are displaced with
respect to the position originally designed in the analog
domain. Moreover, changes in the open loop gain can beobserved and the true noise bandwidth tends to be larger than the target one. These phenomena can make the
system unstable. Experimentally, it was proven that by
employing transformation method, the third order loopremain stable for BLT less than 0.55.
In the controlled-root method proposed by Stephens &Thomas (1995), loop filter constants are determined
specifically for each BLT value. In this way the
deficiencies for the loop design for different BLT are
avoided and the digital loop has exactly the desired
bandwidth, however the structure of the filter remains the
same as the one obtained with the transformation method.In this case the maximum achievable BLT for a stable
loop is limited to 0.4 for rate-only feedback NCOs
(Stephens & Thomas 1995). For most communicationapplications, this condition is satisfied since BLT remains
close to zero. However for some new GNSS applications,
such as weak signal tracking and for extremely highdynamic applications, larger BLT values are required.
Configurations with a 20 ms integration time and a 60 Hz
bandwidth (BLT = 1.2) or with a 500 ms integration time
and a 3 Hz bandwidth (BLT = 1.5) are impossible with
these conventional methods.
Another method which has been rarely treated in the
literature is the minimization method. This method wasfirst used by Gupta (1968) using Z-transform and
modified Z-transform for analog-digital phase-locked
loops. In this case the phase-locked loop is the same asthe continuous case except that the filter is replaced by a
discrete filter followed by a hold circuit (Gupta 1968). In
Kumar & Hurd (1986) this minimization method was
adopted for phase-locked loops with a substantial
computation delay (transport lag). Minimization
techniques for the design of digital tracking loops haveonly been marginally considered in the literature and
tracking loops have been essentially designed by means of
transformation methods.
The main focus of this paper is the design of digital
tracking loops directly in the Z-domain based on thelinear model of the DPLL. More specifically a
minimization technique is used to determine the filter
structure and coefficients. These parameters are
determined in order to minimize the variance of the phase
error. The effect of the integration time is considered inthe linear model to extend the operational range of the
filter to larger BLT values. Instantaneous update of the
loop filter (i. e., in the absence of a computational delay)is assumed. It is shown that the transfer function of the
optimum loop filter with the rate-only feedback NCO is
different from what is currently used for most GNSSreceivers. As a result, it becomes possible to go beyond
the 0.4 BLT limit. This minimization technique for filter
design has never been applied to GNSS receivers, thus it
represents the innovative contribution of this paper. Thedetailed filter design procedure for a ramp change in theinput frequency is given. This choice of frequency input
gives a steady state error equivalent to those achievable
with a third order continuous-time loop. Finally, the performance and stability of the designed loops are shown
by means of live GPS signals for both static and dynamic
situations. Tests are conducted for BLT values at whichconventional loops cannot operate at all.
LINEAR DPLL MODEL
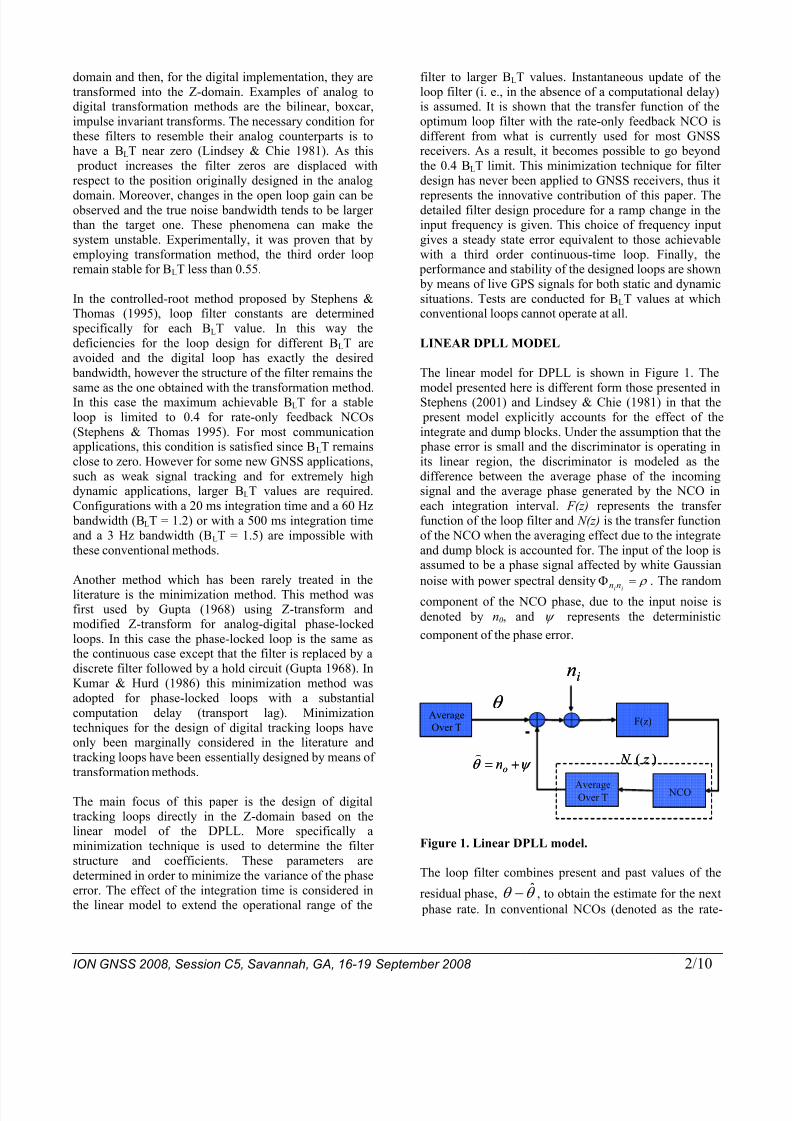
The linear model for DPLL is shown in Figure 1. The
model presented here is different form those presented inStephens (2001) and Lindsey & Chie (1981) in that the
present model explicitly accounts for the effect of the
integrate and dump blocks. Under the assumption that the phase error is small and the discriminator is operating in
its linear region, the discriminator is modeled as the
difference between the average phase of the incomingsignal and the average phase generated by the NCO in
each integration interval. F(z) represents the transfer
function of the loop filter and N(z) is the transfer function
of the NCO when the averaging effect due to the integrate
and dump block is accounted for. The input of the loop isassumed to be a phase signal affected by white Gaussian
noise with power spectral density ρ =Φiinn
. The random
component of the NCO phase, due to the input noise is
denoted by n0, and ψ represents the deterministic
component of the phase error.
in
ψ θ += on )
)( z N
-
AverageOver T
NCO
F(z)Average
Over T
θ
in
ψ θ += on )
)( z N
-
AverageOver T
NCO
F(z)Average
Over T
θ
Figure 1. Linear DPLL model.
The loop filter combines present and past values of the
residual phase, θ θ ˆ− , to obtain the estimate for the next
phase rate. In conventional NCOs (denoted as the rate-
8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 3/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 3/10
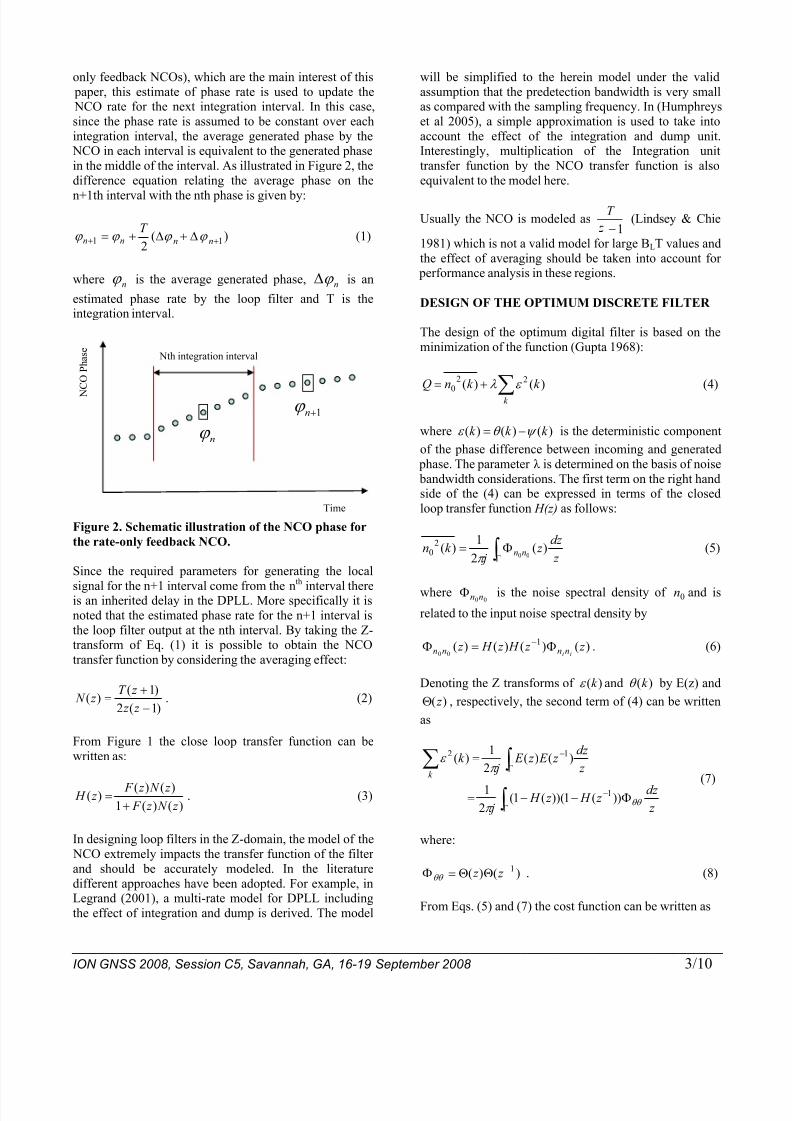
only feedback NCOs), which are the main interest of this
paper, this estimate of phase rate is used to update the NCO rate for the next integration interval. In this case,
since the phase rate is assumed to be constant over each
integration interval, the average generated phase by the NCO in each interval is equivalent to the generated phase
in the middle of the interval. As illustrated in Figure 2, the
difference equation relating the average phase on the
n+1th interval with the nth phase is given by:
)(2
11 ++ Δ+Δ+= nnnn
T ϕ ϕ ϕ ϕ (1)
where nϕ is the average generated phase, nϕ Δ is an
estimated phase rate by the loop filter and T is theintegration interval.
Nth integration interval
Time
N
C O P
h a s e
nϕ
1+nϕ
Figure 2. Schematic illustration of the NCO phase for
the rate-only feedback NCO.
Since the required parameters for generating the local
signal for the n+1 interval come from the nth
interval thereis an inherited delay in the DPLL. More specifically it is
noted that the estimated phase rate for the n+1 interval is
the loop filter output at the nth interval. By taking the Z-transform of Eq. (1) it is possible to obtain the NCO
transfer function by considering the averaging effect:
)1(2
)1()(
−
+=
z z
z T z N . (2)
From Figure 1 the close loop transfer function can be
written as:
)()(1
)()()( z N z F
z N z F z H +
= . (3)
In designing loop filters in the Z-domain, the model of the
NCO extremely impacts the transfer function of the filter
and should be accurately modeled. In the literature
different approaches have been adopted. For example, inLegrand (2001), a multi-rate model for DPLL including
the effect of integration and dump is derived. The model
will be simplified to the herein model under the valid
assumption that the predetection bandwidth is very smallas compared with the sampling frequency. In (Humphreys
et al 2005), a simple approximation is used to take into
account the effect of the integration and dump unit.Interestingly, multiplication of the Integration unit
transfer function by the NCO transfer function is also
equivalent to the model here.
Usually the NCO is modeled as1−
T (Lindsey & Chie
1981) which is not a valid model for large BLT values and
the effect of averaging should be taken into account for performance analysis in these regions.
DESIGN OF THE OPTIMUM DISCRETE FILTER
The design of the optimum digital filter is based on the
minimization of the function (Gupta 1968):
∑+=
k
k k nQ )()(22
0
ε λ (4)
where )()()( k k k ψ θ ε −= is the deterministic component
of the phase difference between incoming and generated
phase. The parameter λ is determined on the basis of noise
bandwidth considerations. The first term on the right handside of the (4) can be expressed in terms of the closed
loop transfer function H(z) as follows:
∫ ΓΦ= z
dz z
jk n nn )(
2
1)(
00
20
π (5)
where00nnΦ is the noise spectral density of 0n and is
related to the input noise spectral density by
)()()()(1
00 z z H z H z
ii nnnn Φ=Φ −. (6)
Denoting the Z transforms of )(k ε and )(k θ by E(z) and
)( z Θ , respectively, the second term of (4) can be written
as
∫
∑ ∫
Γ
−
Γ
−
Φ−−=
=
z
dz z H z H
j
z
dz z E z E
jk
k
θθ π
π ε
))(1))((1(2
1
)()(2
1)(
1
12
(7)
where:
)()( 1−ΘΘ=Φ z z θθ . (8)
From Eqs. (5) and (7) the cost function can be written as

8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 4/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 4/10
dz z W z W z P
z N z W z N z W j
Q
)]()()(
))()()()(1([2
1
1
11
−
−−
Γ
+
Φ−−= ∫ θθ λ π
(9)
where
)(
)()(
z N
z H z W = (10)
and
)()()]([)( 1−Φ+= z N z N z z P θθ λ ρ . (11)
By applying the standard minimization procedure to Q the
optimum solution for W(z) and thus F(z) can be found as
(Gupta 1968, Jury 1964)
)(
])(
)()([
)(
1
0 z P
z zP z z N z
z W +
+−
−
Φ
=
θθ λ
(12)
where
)()()( z P z P z P −+= . (13)
In the above )( z P + is the part of )( z P whose poles and
zeros lay inside the unit circle and +][ represents the part
of the partial fraction expansion of its argument whose
poles are inside the unit circle.
Finally from Eqs. (3), (10) and (12) the optimum digitalfilter transfer function is found as
)()(1
)()(
0
0
z N z W
z W z F
−= . (14)
The optimum filter in (14) is a function of λ and, as
mentioned earlier, this parameter is determined from
noise bandwidth considerations. More specifically thenormalized loop noise bandwidth is defined as
∫ Γ−=
z
dz z H z H
j B )()(
2
12
1
π (15)
where B is the one sided normalized loop noise
bandwidth and is related to one sided loop noise
bandwidth as
T
B B L = . (16)
The integral in (15) can be computed by expressing B interms of the coefficients of H(z). Eq. (16) shows that the
noise bandwidth is a function of the normalized noise
bandwidth and of the integration time (loop updateinterval). For instance a loop designed with a normalized
noise bandwidth of 0.5 will result in a loop noise bandwidth of 25 Hz for T=20 ms.
LOOP FILTER DESIGN FOR A FREQUENCY
RAMP INPUT
In this section the designing procedure for a filter with afrequency ramp as input is detailed. In this case the
designed loop will be equivalent to a 3rd order continuous-
time loop.
In this case, )()( 2t ut t =θ and Eq. (8) becomes
31
112
3
2
)1(
)1(
)1(
)1(
−
+⋅
−
+=Φ
−
−−
z
z z T
z
z z T θθ . (17)
The transfer function of the NCO with the averaging
effect is given by (2) and from (11), P(z) can be written as
; )1(
)1(4
))1(
14)4()44()106(
1)-(z
)44()4(4z-(
4)(
41
1234
4
234
8
234
8
5678
2
⎭⎬⎫
⎩⎨⎧
−
++++
⋅⎭⎬⎫
⎩⎨⎧
−
++++=
−
−++−+−++
++−++−++
⋅=
−
−−−−
z
edz cz bz az
z
edz cz bz az T
z
z z h z h z h
z h z h z
T z P
ρ
ρ
(18)
where
ρ
λ 4T h = . (19)
The terms in the brackets of Eq. (18) represent+
)( z P and
)( z P −
, respectively. By equating the coefficients of
equal powers of z in Eq. (18), the following set of equations are obtained:
8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 5/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 5/10
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+=++++
−=+++
−=++
=+
−=
hed cba
habbcdced
hacbd ce
ad be
ae
610
44
4
4
1
22222
. (20)
The argument of the +][ operator in Eq. (12) can bewritten as:
3432
2351
)1)((2
)1(
)(
)()(
−++++
+=
Φ−
−
z ez dz cz bz a
z z T
z zP
z z N λ λ θθ (21)
By considering the fact that the roots of 432 ez dz cz bz a ++++ are outside the unit circle and
writing the partial fraction expansion of Eq. (21), )(0 z W
can be computed and, consequently, from Eq. (14), )( z F
is derived as:
)(
)(2
23
2
d d d d
nnn
D z C z B z AT
C z B z A z F
+++
++−= (22)
where the filter coefficients are related to coefficients in(20) and are given in the appendix. The filter structure can
be further simplified. By computing the roots of the
denominator in (22) it is found that the locations of the poles are fixed:
)1()1(
))((
2 +−
−−=
z z
z z z z z K F z z (23)
where K is the optimal gain of the filter given by
d
n
TA
A K
2−= . (24)
The zeros of Eq. (23) can be found as the roots of
nnn C z B z A ++2= 0. The structure of the proposed filter
has an extra pole and zero with respect to a conventional
third order loop filter.
In order to find the coefficients of the filter for differentnoise bandwidths, Eq. (20) should be solved for a range of
values of h. Note that, from the possible solutions of (20)
for a given h, the only acceptable one is that resulting in a
stable loop, which means that the roots of
edz cz bz az ++++ 234should lay inside the unit circle.
From these considerations the filter coefficients in Eq.
(22) or equivalently, the zeros and gain in Eq. (23) can becomputed. Finally from Eq. (3) and Eq. (15) the
normalized bandwidth is obtained.
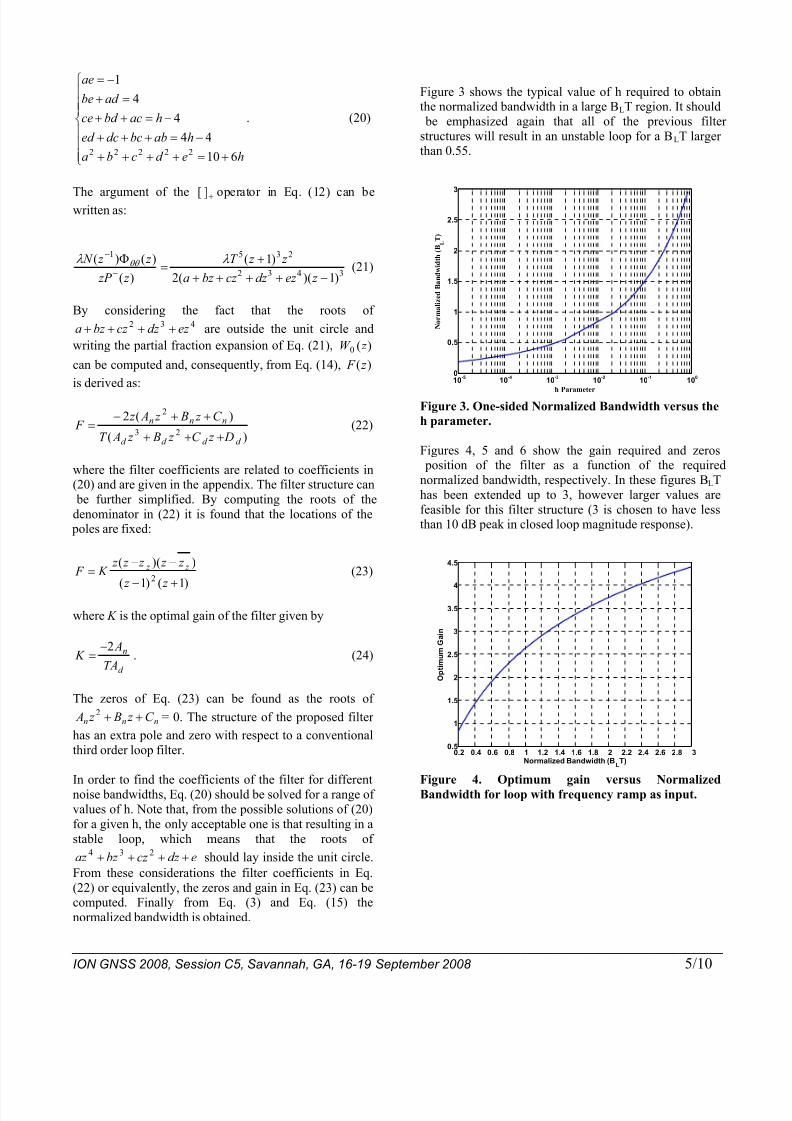
Figure 3 shows the typical value of h required to obtainthe normalized bandwidth in a large BLT region. It should
be emphasized again that all of the previous filter
structures will result in an unstable loop for a BLT larger than 0.55.
10-5
10-4
10-3
10-2
10-1
100
0
0.5
1
1.5
2
2.5
3
h Parameter
N o r m a l i z e d B a n d w i d t h ( B L
T )
Figure 3. One-sided Normalized Bandwidth versus the
h parameter.
Figures 4, 5 and 6 show the gain required and zeros position of the filter as a function of the required
normalized bandwidth, respectively. In these figures BLT
has been extended up to 3, however larger values are
feasible for this filter structure (3 is chosen to have lessthan 10 dB peak in closed loop magnitude response).
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30.5
1
1.5
2
2.5
3
3.5
4
4.5
Normalized Bandwidth (BLT)
O p t i m u m G a i n
Figure 4. Optimum gain versus NormalizedBandwidth for loop with frequency ramp as input.
8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 6/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 6/10
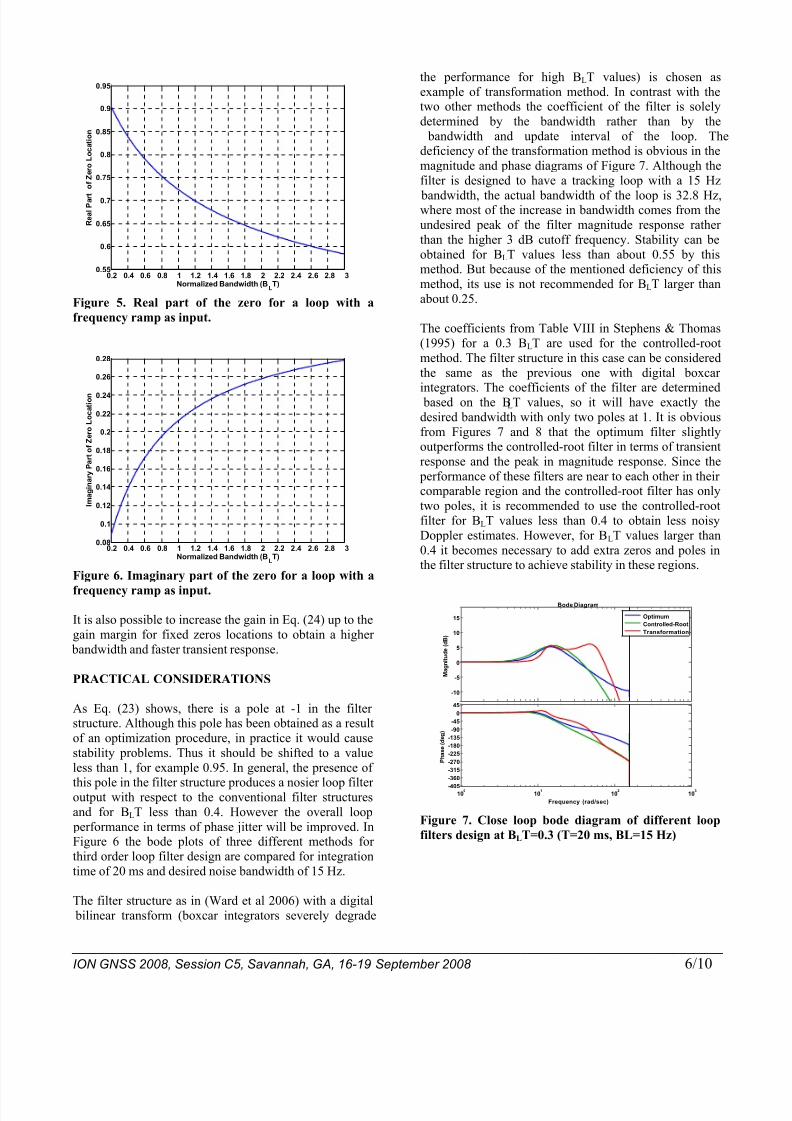
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
Normalized Bandwidth (BLT)
R e a l P a r t o f Z e r o L o c a t i o n
Figure 5. Real part of the zero for a loop with a
frequency ramp as input.
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0.26
0.28
Normalized Bandwidth (BLT)
I m a g i n a r y P a r t o f Z e r o L o c a t i o n
Figure 6. Imaginary part of the zero for a loop with a
frequency ramp as input.
It is also possible to increase the gain in Eq. (24) up to the
gain margin for fixed zeros locations to obtain a higher
bandwidth and faster transient response.
PRACTICAL CONSIDERATIONS
As Eq. (23) shows, there is a pole at -1 in the filter structure. Although this pole has been obtained as a result
of an optimization procedure, in practice it would cause
stability problems. Thus it should be shifted to a value
less than 1, for example 0.95. In general, the presence of
this pole in the filter structure produces a nosier loop filter output with respect to the conventional filter structures
and for BLT less than 0.4. However the overall loop
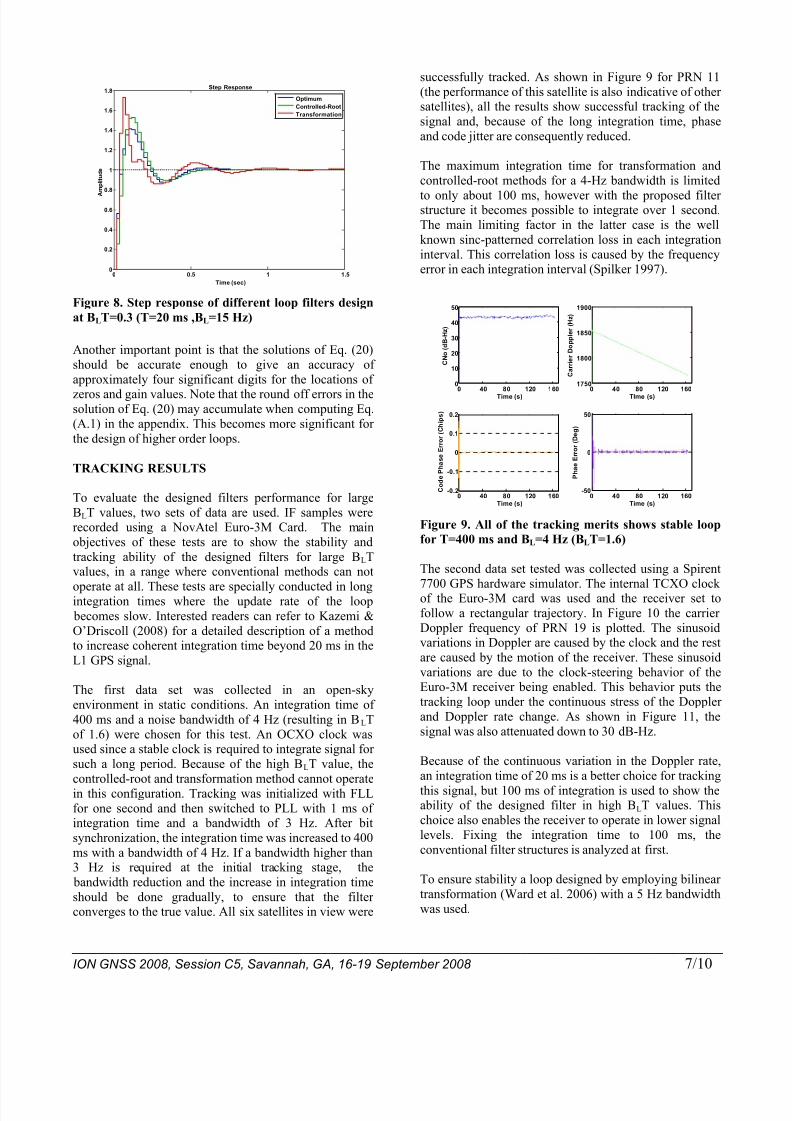
performance in terms of phase jitter will be improved. InFigure 6 the bode plots of three different methods for
third order loop filter design are compared for integration
time of 20 ms and desired noise bandwidth of 15 Hz.
The filter structure as in (Ward et al 2006) with a digital
bilinear transform (boxcar integrators severely degrade
the performance for high BLT values) is chosen as
example of transformation method. In contrast with thetwo other methods the coefficient of the filter is solely
determined by the bandwidth rather than by the
bandwidth and update interval of the loop. Thedeficiency of the transformation method is obvious in the
magnitude and phase diagrams of Figure 7. Although the
filter is designed to have a tracking loop with a 15 Hz
bandwidth, the actual bandwidth of the loop is 32.8 Hz,where most of the increase in bandwidth comes from the
undesired peak of the filter magnitude response rather
than the higher 3 dB cutoff frequency. Stability can be
obtained for BLT values less than about 0.55 by thismethod. But because of the mentioned deficiency of this
method, its use is not recommended for BLT larger than
about 0.25.
The coefficients from Table VIII in Stephens & Thomas
(1995) for a 0.3 BLT are used for the controlled-root
method. The filter structure in this case can be considered
the same as the previous one with digital boxcar
integrators. The coefficients of the filter are determined based on the BLT values, so it will have exactly the
desired bandwidth with only two poles at 1. It is obvious
from Figures 7 and 8 that the optimum filter slightlyoutperforms the controlled-root filter in terms of transient
response and the peak in magnitude response. Since the
performance of these filters are near to each other in their comparable region and the controlled-root filter has only
two poles, it is recommended to use the controlled-root
filter for BLT values less than 0.4 to obtain less noisy
Doppler estimates. However, for BLT values larger than
0.4 it becomes necessary to add extra zeros and poles inthe filter structure to achieve stability in these regions.
-10
-5
0
5
10
15
M a g n i t u d e ( d B )
100
101
102
103
-405
-360
-315
-270
-225
-180
-135
-90
-45
0
45
P h a s e ( d e g )
Bode Diagram
Frequency (rad/sec)
Optimum
Controlled-Root
Transformation
Figure 7. Close loop bode diagram of different loop
filters design at BLT=0.3 (T=20 ms, BL=15 Hz)
8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 7/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 7/10
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Step Response
Time (sec)
A m p l i t u d e
Optimum
Controlled-Root
Transformation
Figure 8. Step response of different loop filters design
at BLT=0.3 (T=20 ms ,BL=15 Hz)
Another important point is that the solutions of Eq. (20)
should be accurate enough to give an accuracy of
approximately four significant digits for the locations of
zeros and gain values. Note that the round off errors in thesolution of Eq. (20) may accumulate when computing Eq.
(A.1) in the appendix. This becomes more significant for
the design of higher order loops.
TRACKING RESULTS
To evaluate the designed filters performance for large
BLT values, two sets of data are used. IF samples wererecorded using a NovAtel Euro-3M Card. The main
objectives of these tests are to show the stability and
tracking ability of the designed filters for large BLTvalues, in a range where conventional methods can not
operate at all. These tests are specially conducted in longintegration times where the update rate of the loop
becomes slow. Interested readers can refer to Kazemi &
O’Driscoll (2008) for a detailed description of a methodto increase coherent integration time beyond 20 ms in the
L1 GPS signal.
The first data set was collected in an open-sky
environment in static conditions. An integration time of
400 ms and a noise bandwidth of 4 Hz (resulting in B LT
of 1.6) were chosen for this test. An OCXO clock wasused since a stable clock is required to integrate signal for
such a long period. Because of the high BLT value, the
controlled-root and transformation method cannot operate
in this configuration. Tracking was initialized with FLL
for one second and then switched to PLL with 1 ms of integration time and a bandwidth of 3 Hz. After bit
synchronization, the integration time was increased to 400
ms with a bandwidth of 4 Hz. If a bandwidth higher than3 Hz is required at the initial tracking stage, the
bandwidth reduction and the increase in integration time
should be done gradually, to ensure that the filter converges to the true value. All six satellites in view were
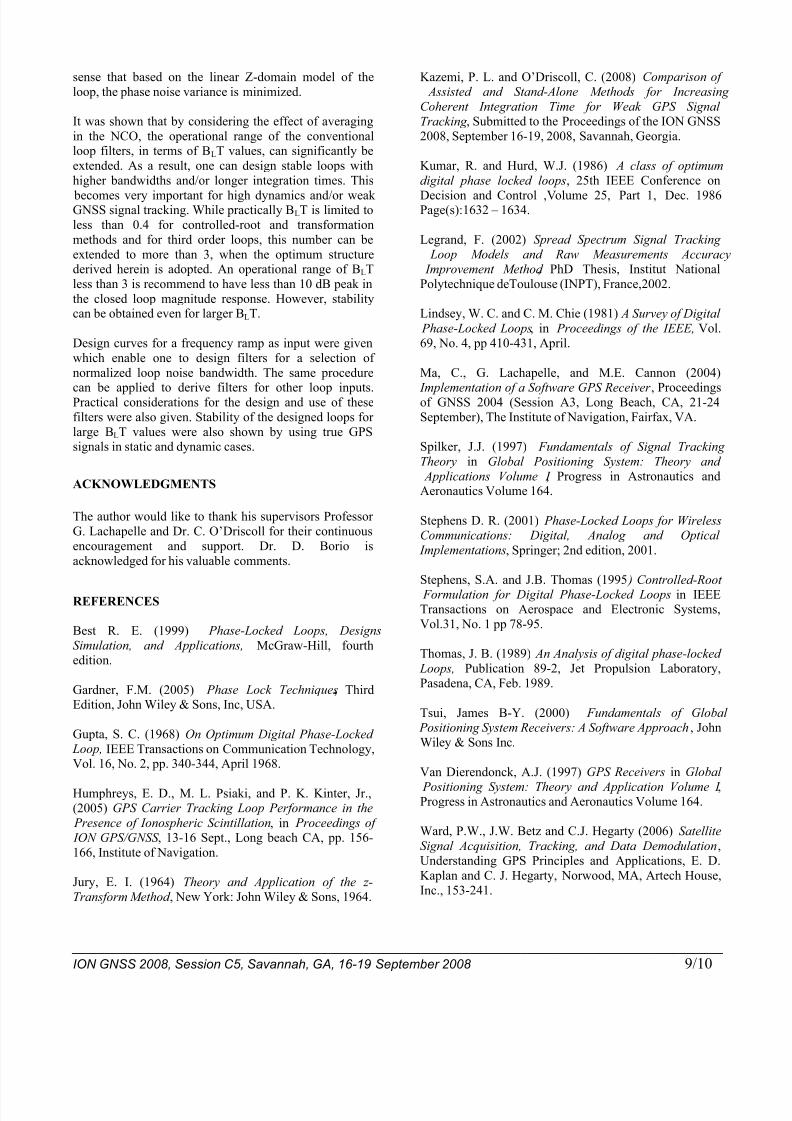
successfully tracked. As shown in Figure 9 for PRN 11
(the performance of this satellite is also indicative of other satellites), all the results show successful tracking of the
signal and, because of the long integration time, phase
and code jitter are consequently reduced.
The maximum integration time for transformation and
controlled-root methods for a 4-Hz bandwidth is limited
to only about 100 ms, however with the proposed filter structure it becomes possible to integrate over 1 second.
The main limiting factor in the latter case is the well
known sinc-patterned correlation loss in each integration
interval. This correlation loss is caused by the frequencyerror in each integration interval (Spilker 1997).
0 40 80 120 1600
10
20
30
40
50
Time (s)
C N o ( d B - H z )
0 40 80 120 160
1750
1800
1850
1900
TIme (s)
C a r r i e r D o p p l e r ( H z )
0 40 80 120 160-0.2
-0.1
0
0.1
0.2
Time (s)
C o d e P h a s e E r r o r ( C h i p s )
0 40 80 120 160
-50
0
50
Time (s)
P h a e E r r o r ( D e g )
Figure 9. All of the tracking merits shows stable loop
for T=400 ms and BL=4 Hz (BLT=1.6)
The second data set tested was collected using a Spirent
7700 GPS hardware simulator. The internal TCXO clock of the Euro-3M card was used and the receiver set to
follow a rectangular trajectory. In Figure 10 the carrier
Doppler frequency of PRN 19 is plotted. The sinusoidvariations in Doppler are caused by the clock and the rest
are caused by the motion of the receiver. These sinusoid
variations are due to the clock-steering behavior of theEuro-3M receiver being enabled. This behavior puts the
tracking loop under the continuous stress of the Doppler
and Doppler rate change. As shown in Figure 11, the
signal was also attenuated down to 30 dB-Hz.
Because of the continuous variation in the Doppler rate,
an integration time of 20 ms is a better choice for tracking
this signal, but 100 ms of integration is used to show theability of the designed filter in high BLT values. This
choice also enables the receiver to operate in lower signal
levels. Fixing the integration time to 100 ms, the
conventional filter structures is analyzed at first.
To ensure stability a loop designed by employing bilinear
transformation (Ward et al. 2006) with a 5 Hz bandwidth
was used.

8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 8/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 8/10
As shown in Figure 10 at around 115 seconds, because of the rapid change in the carrier Doppler frequency, the
loop was unable to track this rapid change (where the line
of sight acceleration reaches to about 0.8 G) andeventually total loss of lock occurred. Figure 11 shows
that the loss of carrier lock is followed by a loss of code
lock. As a result, a wider bandwidth is required to track
this signal successfully. However, by increasing the bandwidth from 5 Hz to 7 Hz (BLT=0.7), an instable loop
is obtained. However, the optimum filter designed from
Eq. (23) for a loop with 12 Hz bandwidth (BLT=1.2)
results in a stable loop that successfully tracks the signal.This is a significant improvement with respect to
conventional loops.
0 20 40 60 80 100 120 140 160 180-1450
-1440
-1430
-1420
-1410
-1400
-1390
-1380
-1370
-1360
Time (s)
C a r r i e r D o p p l e r ( H
z )
T=100 ms, BL=12 Hz
T=100 ms, BL=5 Hz, Trans.
T=100 ms, BL=7 Hz, Trans.
Figure 10. Comparison of optimum filter carrier
Doppler estimate with conventional design.
0 20 40 60 80 100 120 140 160 180
-10
0
10
20
30
40
50
Time
C N o ( d B - H z )
T=100 ms, BL=12 Hz
T=100 ms, BL=5 Hz, Trans.
T=100 ms, BL=7 Hz, Trans.
Figure 11. CN0 estimate.
In DPLLs, with each update interval, the fixed locally
generated carrier frequency is correlated with the
incoming signal. The assumption of having a constantfrequency over each 100 ms is not valid in this test. The
performance is compared with an integration time of 20
ms and a bandwidth of 10 Hz. As shown in Figure 12,
changes in Doppler frequency in each 100 ms cause phase
a mismatch between the incoming and locally generatedsignals, which is correctly detected by the phase
discriminator. Epochs of the maximum mismatch exactly
correspond to the epochs with the maximum Doppler ratechange. Reducing the update interval to 20 ms could
reduce this phase mismatch, however choosing longer
update intervals becomes inevitable in very weak signal
conditions. Figure 12 shows the output of the phasediscriminator at the transition time from strong signal
power to 30 dB-Hz. It is obvious that the phase error with
100 ms remains approximately at the same level as before
(again mainly caused by the dynamics), but the phaseerror with 20 ms integration time becomes much noisier.
26 28 30 32 34-40
-30
-20
-10
0
10
20
30
40
50
Time (s)
P h a s e E r r o r ( D e g )
T=100 ms, BL=12 Hz
T=20 ms, BL=10 Hz
Figure 12. Output of the PLL discriminator.
0 20 40 60 80 100 120 140 160 180-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Time (s)
C o d e P h a s e E r r o r ( c h i p s )
T=20 ms
T=100 ms
Figure 13. Output of the DLL discriminator.
As shown in Figure 13, the advantage of choosing 100 ms
becomes apparent in reducing code jitter since the codedoes not experience this amount of dynamics especially in
aided-DLL scheme.
CONCLUSIONS
This paper presented new filter structures for DPLLs with
rate-only feedback NCOs. Filters are optimum in the
8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 9/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 9/10
sense that based on the linear Z-domain model of the
loop, the phase noise variance is minimized.
It was shown that by considering the effect of averaging
in the NCO, the operational range of the conventionalloop filters, in terms of BLT values, can significantly be
extended. As a result, one can design stable loops with
higher bandwidths and/or longer integration times. This
becomes very important for high dynamics and/or weak GNSS signal tracking. While practically BLT is limited to
less than 0.4 for controlled-root and transformation
methods and for third order loops, this number can be
extended to more than 3, when the optimum structurederived herein is adopted. An operational range of BLT
less than 3 is recommend to have less than 10 dB peak in
the closed loop magnitude response. However, stabilitycan be obtained even for larger BLT.
Design curves for a frequency ramp as input were given
which enable one to design filters for a selection of
normalized loop noise bandwidth. The same procedure
can be applied to derive filters for other loop inputs.Practical considerations for the design and use of these
filters were also given. Stability of the designed loops for
large BLT values were also shown by using true GPSsignals in static and dynamic cases.
ACKNOWLEDGMENTS
The author would like to thank his supervisors Professor
G. Lachapelle and Dr. C. O’Driscoll for their continuous
encouragement and support. Dr. D. Borio is
acknowledged for his valuable comments.
REFERENCES
Best R. E. (1999) Phase-Locked Loops, Designs
Simulation, and Applications, McGraw-Hill, fourthedition.
Gardner, F.M. (2005) Phase Lock Techniques, ThirdEdition, John Wiley & Sons, Inc, USA.
Gupta, S. C. (1968) On Optimum Digital Phase-Locked Loop, IEEE Transactions on Communication Technology,Vol. 16, No. 2, pp. 340-344, April 1968.
Humphreys, E. D., M. L. Psiaki, and P. K. Kinter, Jr.,
(2005) GPS Carrier Tracking Loop Performance in the
Presence of Ionospheric Scintillation, in Proceedings of
ION GPS/GNSS , 13-16 Sept., Long beach CA, pp. 156-
166, Institute of Navigation.
Jury, E. I. (1964) Theory and Application of the z-
Transform Method , New York: John Wiley & Sons, 1964.
Kazemi, P. L. and O’Driscoll, C. (2008) Comparison of
Assisted and Stand-Alone Methods for Increasing
Coherent Integration Time for Weak GPS Signal
Tracking , Submitted to the Proceedings of the ION GNSS
2008, September 16-19, 2008, Savannah, Georgia.
Kumar, R. and Hurd, W.J. (1986) A class of optimum
digital phase locked loops, 25th IEEE Conference on
Decision and Control ,Volume 25, Part 1, Dec. 1986Page(s):1632 – 1634.
Legrand, F. (2002) Spread Spectrum Signal Tracking
Loop Models and Raw Measurements Accuracy
Improvement Method , PhD Thesis, Institut National
Polytechnique deToulouse (INPT), France,2002.
Lindsey, W. C. and C. M. Chie (1981) A Survey of Digital
Phase-Locked Loops, in Proceedings of the IEEE, Vol.
69, No. 4, pp 410-431, April.
Ma, C., G. Lachapelle, and M.E. Cannon (2004)
Implementation of a Software GPS Receiver , Proceedingsof GNSS 2004 (Session A3, Long Beach, CA, 21-24
September), The Institute of Navigation, Fairfax, VA.
Spilker, J.J. (1997) Fundamentals of Signal Tracking
Theory in Global Positioning System: Theory and
Applications Volume I , Progress in Astronautics andAeronautics Volume 164.
Stephens D. R. (2001) Phase-Locked Loops for WirelessCommunications: Digital, Analog and Optical
Implementations, Springer; 2nd edition, 2001.
Stephens, S.A. and J.B. Thomas (1995 ) Controlled-Root Formulation for Digital Phase-Locked Loops in IEEETransactions on Aerospace and Electronic Systems,
Vol.31, No. 1 pp 78-95.
Thomas, J. B. (1989) An Analysis of digital phase-locked
Loops, Publication 89-2, Jet Propulsion Laboratory,
Pasadena, CA, Feb. 1989.
Tsui, James B-Y. (2000) Fundamentals of Global
Positioning System Receivers: A Software Approach, John
Wiley & Sons Inc.
Van Dierendonck, A.J. (1997) GPS Receivers in Global
Positioning System: Theory and Application Volume I ,Progress in Astronautics and Aeronautics Volume 164.
Ward, P.W., J.W. Betz and C.J. Hegarty (2006) Satellite
Signal Acquisition, Tracking, and Data Demodulation,
Understanding GPS Principles and Applications, E. D.
Kaplan and C. J. Hegarty, Norwood, MA, Artech House,
Inc., 153-241.

8/2/2019 08gnss Student Paper Pejmank 25sep08
http://slidepdf.com/reader/full/08gnss-student-paper-pejmank-25sep08 10/10
__________________________________________________________________________________________
ION GNSS 2008, Session C5, Savannah, GA, 16-19 September 2008 10/10
Watson, R., M.G. Petovello, G. Lachapelle and R. Klukas
(2007) Impact of Oscillator Errors on IMU-Aided GPS
Tracking Loop Performance, European Navigation
Conference, Geneva, Swizterland.
APPENDIX
In this appendix the relation between the filters
coefficients and the coefficients in Eq. (20) are given:
32be)14ce10bd
3b-9a-e-c-3d-8ab-54ae24ad(6acD
)2d2b4ac
8ad2c-4ae2e-8ab6a4ce-(4bdC)3c11ad50ae
-8ab b2ac-24ad-14bd-10ce-3e(-32beB
)8a-8ae-8ad-8ab-(-8acA
)c6ce-6ac-9e3b
24be-10bd-3d8ab46ae-24ad-9a(8deC
8ac)48ad8b
-8e-8cd96ae24ab-24a-24ce56be(24bdB
)d3c8bc19a3e
6ac24be-16ad-9b24ab10ce-42ae-(-6bdA
22222
d
22
222
d
222
22
d
2
d
222
22
n
2
22
n
2222
2
n
++
+++=
++
+++++=+++
+++=
=
++
++++=
++
++++=
++++
++++=
(A.1)