1 energy-efficient localization for networks of underwater drifters diba mirza curt schurgers...
Post on 20-Dec-2015
217 views
TRANSCRIPT
1
Energy-Efficient localization for networks
of underwater drifters
Diba Mirza
Curt SchurgersDepartment of Electrical and Computer Engineering
2
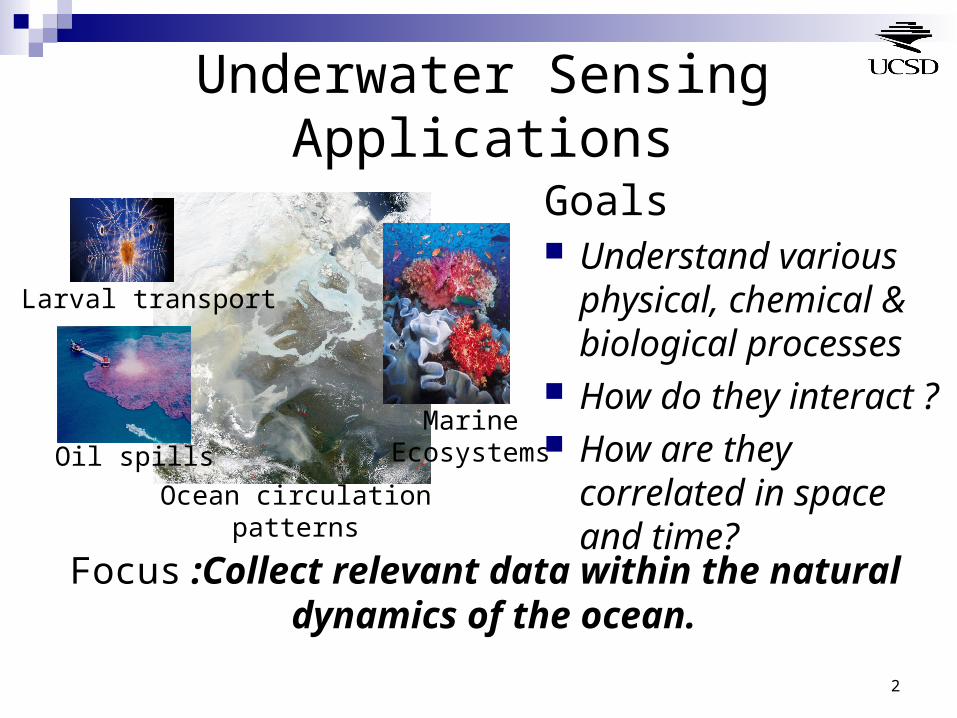
Underwater Sensing Applications
Larval transport
Marine Ecosystems
Ocean circulation patterns
Oil spills
Focus :Collect relevant data within the natural dynamics of the ocean.
Goals Understand various
physical, chemical & biological processes
How do they interact ? How are they correlated
in space and time?
3
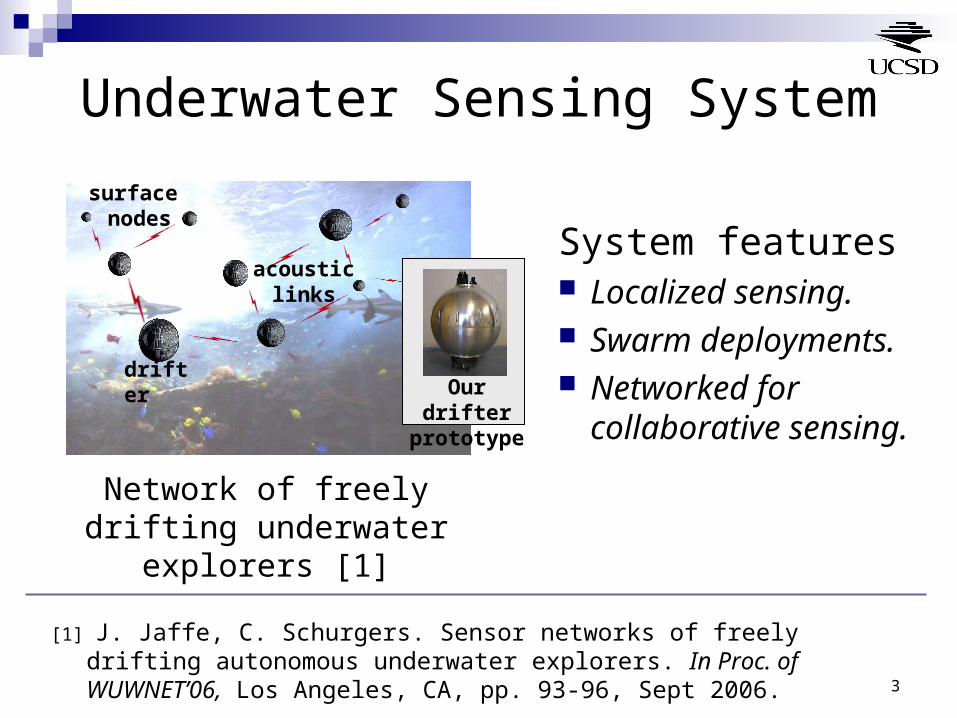
Underwater Sensing System
surface nodes
acoustic links
drifterOur drifter prototype
Network of freely drifting underwater explorers [1]
System features Localized sensing. Swarm deployments. Networked for
collaborative sensing.
[1] J. Jaffe, C. Schurgers. Sensor networks of freely drifting autonomous underwater explorers. In Proc. of WUWNET’06, Los Angeles, CA, pp. 93-96, Sept 2006.
4
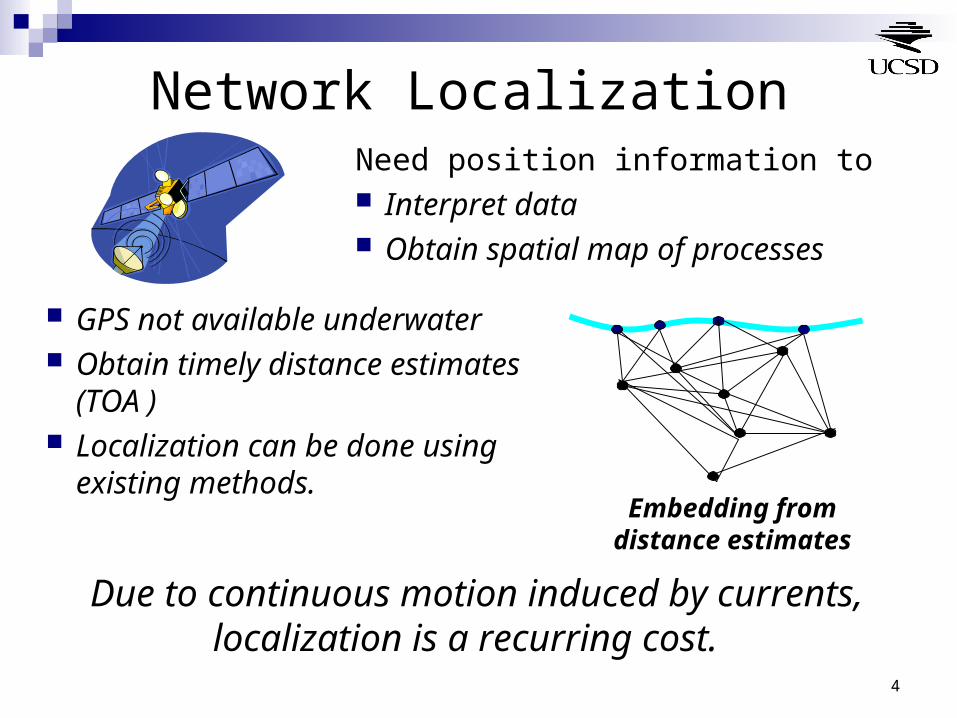
Network LocalizationNeed position information to Interpret data Obtain spatial map of processes
GPS not available underwater Obtain timely distance estimates (TOA ) Localization can be done using existing
methods.
Due to continuous motion induced by currents, localization is a recurring cost.
Embedding from distance estimates
5
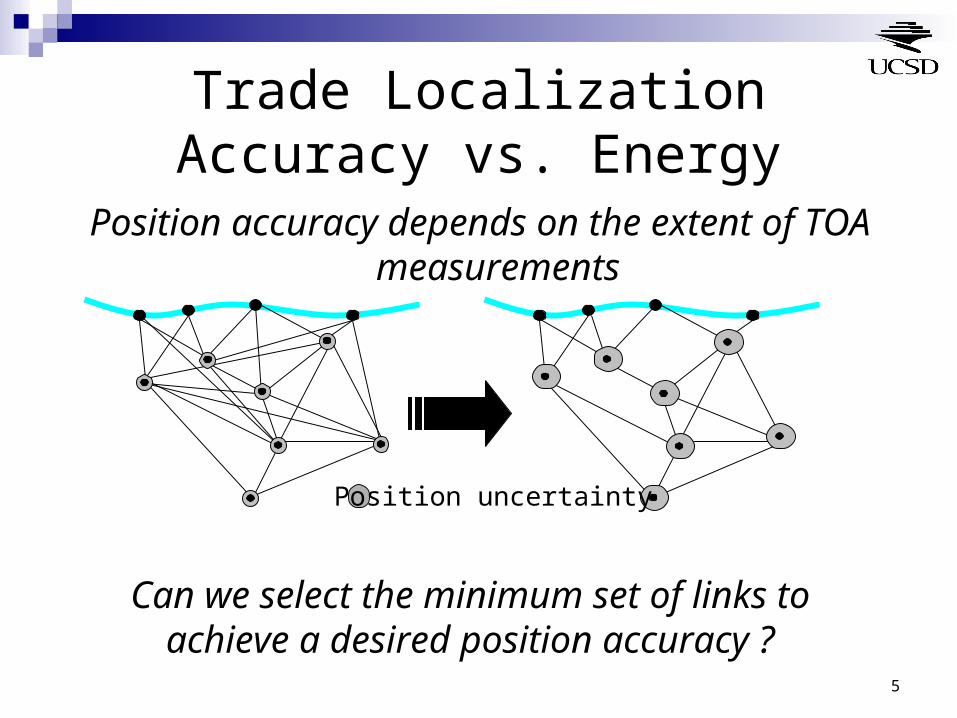
Trade Localization Accuracy vs. Energy
Position uncertainty
Position accuracy depends on the extent of TOA measurements
Can we select the minimum set of links to achieve a desired position accuracy ?
6
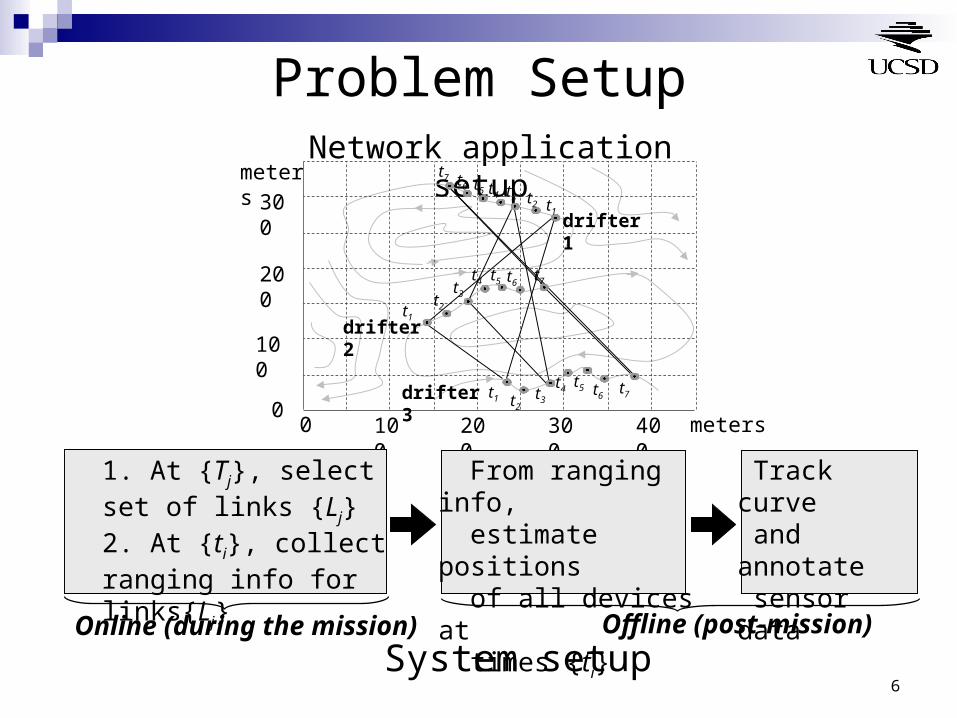
Problem Setup Network application
setup
t2t3
t7
0 100 200 300 400
0
100
200
300
meters
meters
t1
t1
t1t2
t6 t5 t4 t3
t7
t5t4 t6
t2
t3
t7t5t4 t6
drifter 1
drifter 2
drifter 3
System setup
1. At {Tj}, select set of links {Lj}2. At {ti}, collect ranging info for links{Lj}
From ranging info, estimate positions of all devices at times {ti}
Track curve and annotate sensor data
Online (during the mission) Offline (post-mission)
7
Determining the optimum link-set..
Need a measure of localization error. Use the Cramer Rao Lower Bound (achieved by ML
estimators)
Localization algorithmis run offline
Can be computationally intensive for
best performance
To obtain optimum set of links:
8
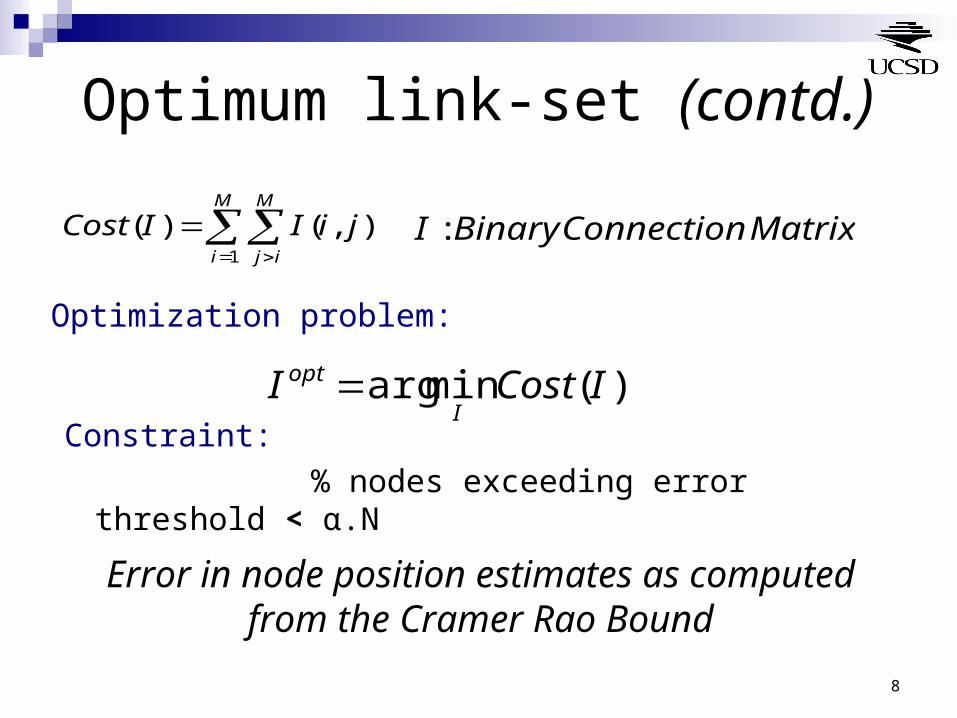
Optimum link-set (contd.)
Optimization problem:
M
i
M
ij
jiIICost1
),()( MatrixConnectionBinaryI :
)(minarg ICostII
opt Constraint:
% nodes exceeding error threshold < α.N
Error in node position estimates as computed from the Cramer Rao Bound
9
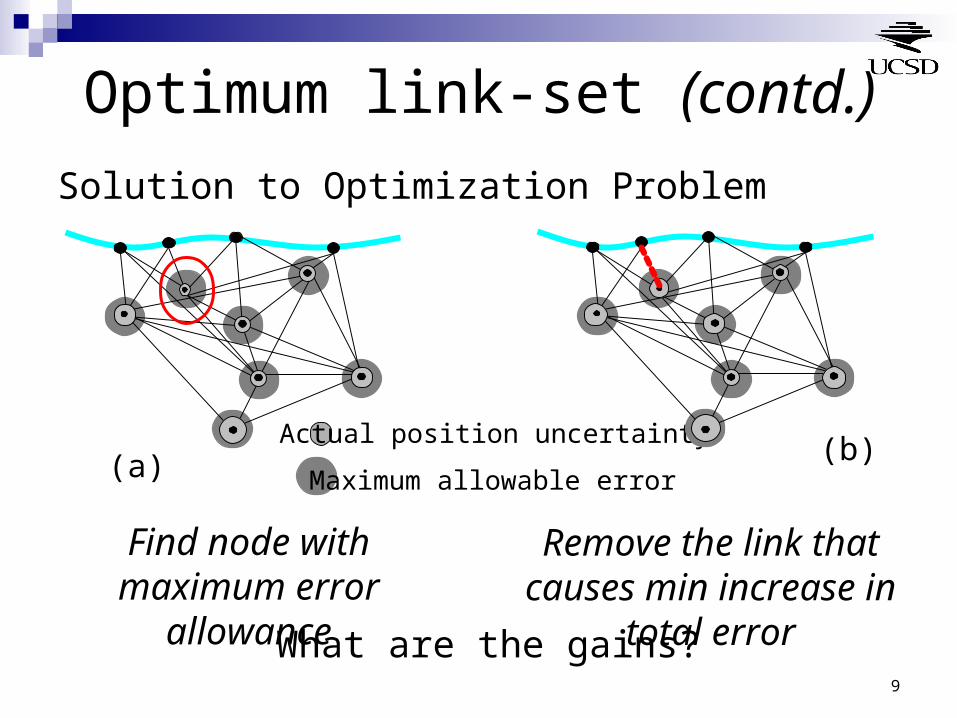
Optimum link-set (contd.)
Solution to Optimization Problem
Actual position uncertainty
Maximum allowable error
Find node with maximum error allowance
Remove the link that causes min increase in total error
(b)(a)
What are the gains?
10
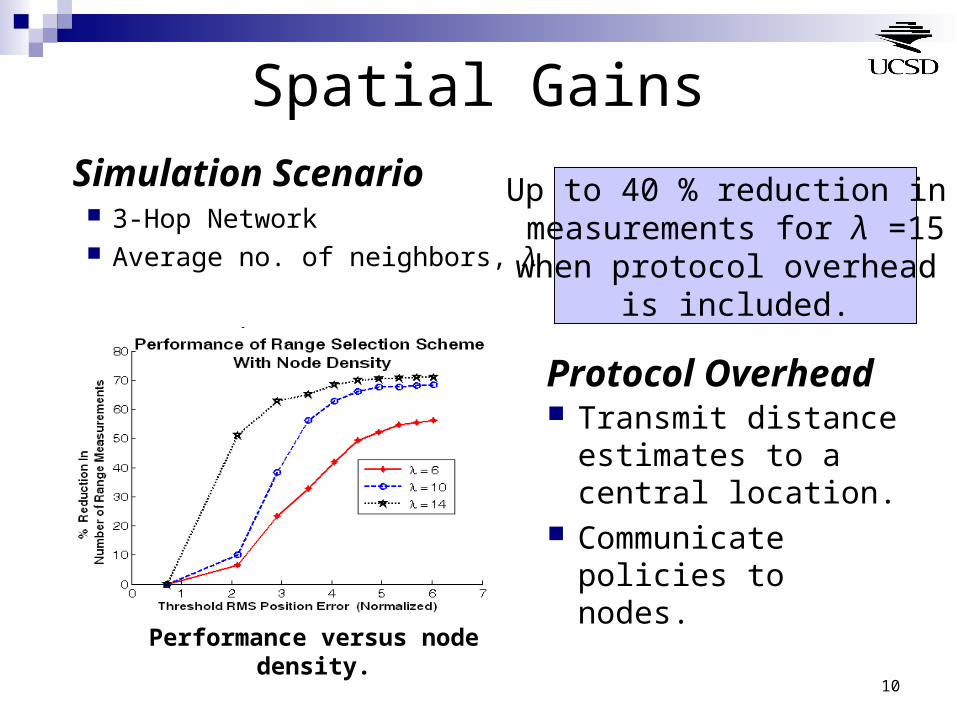
Spatial Gains
Performance versus node density.
Simulation Scenario 3-Hop Network Average no. of neighbors, λ
Protocol Overhead Transmit distance
estimates to a central location.
Communicate policies to nodes.
Up to 40 % reduction in measurements for λ =15when protocol overhead
is included.
11
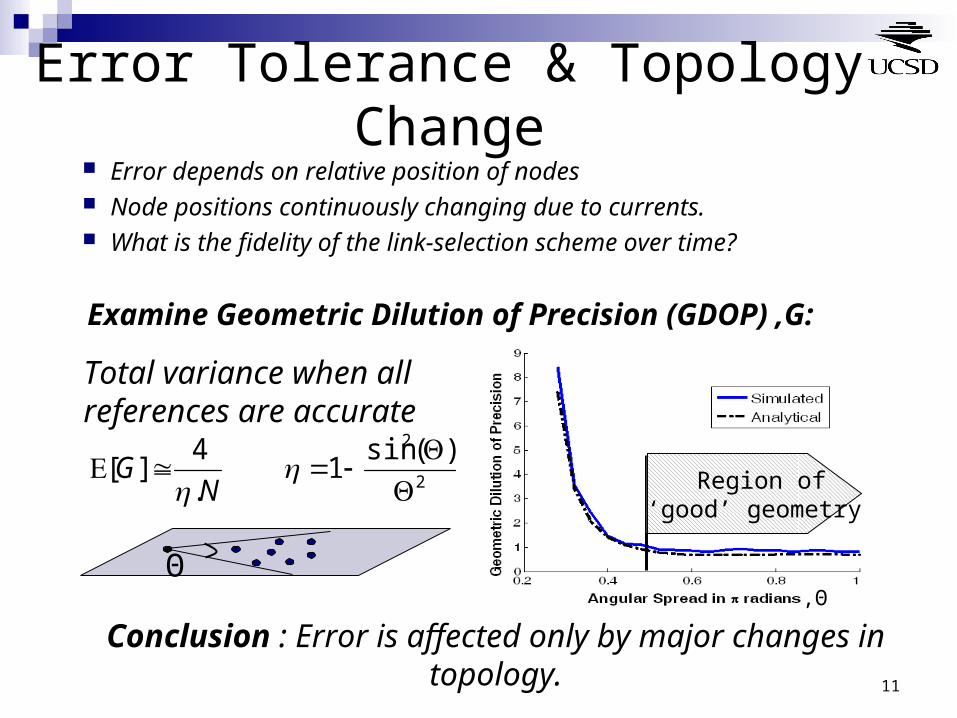
Error Tolerance & Topology Change
Θ
2
2 )(sin1
.
4][
N
G
,Θ
Region of ‘good’ geometry
Error depends on relative position of nodes Node positions continuously changing due to currents. What is the fidelity of the link-selection scheme over time?
Examine Geometric Dilution of Precision (GDOP) ,G:
Conclusion : Error is affected only by major changes in topology.
Total variance when all references are accurate
12
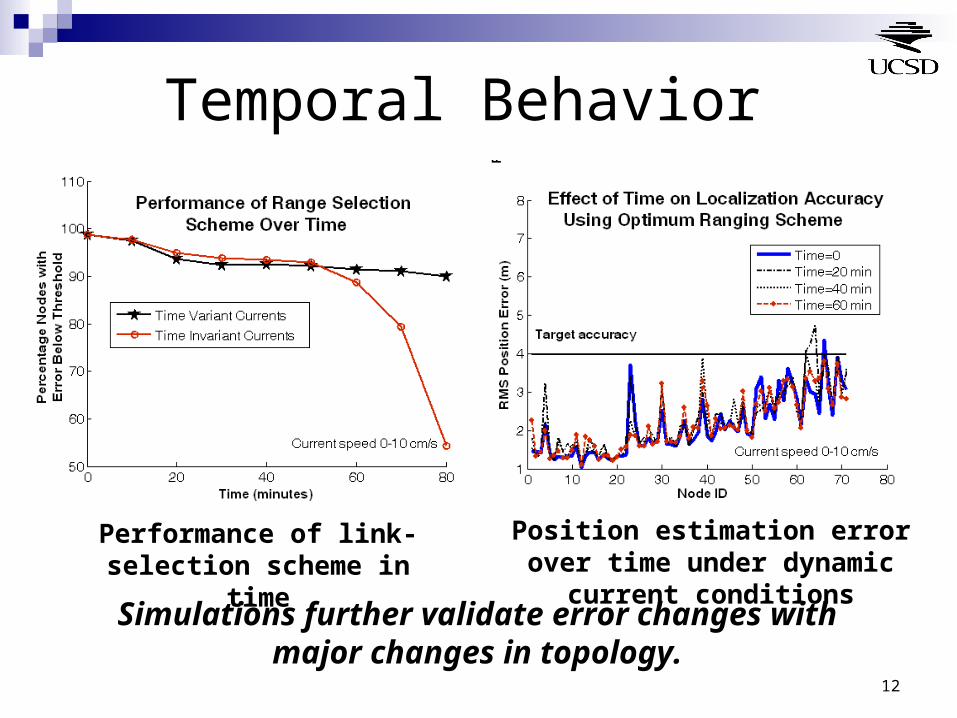
Temporal Behavior
Performance of link-selection scheme in time
Position estimation error over time under dynamic current conditions
Simulations further validate error changes with major changes in topology.
13
Adapting to changing requirements
Suppose target error of a group of nodes changes over time.Say, L groups, each can choose any of K different target errors.How can the link-selection scheme be adapted ?
Re-compute the link policy Involves collecting range estimates from all nodes. Over head can be large.
Pre-compute all possible policies Gives rise to KL different policies. Setting a particular policy requires global communication.
Is there a better way?
Possible Solutions:
14
Adapting to changing requirements
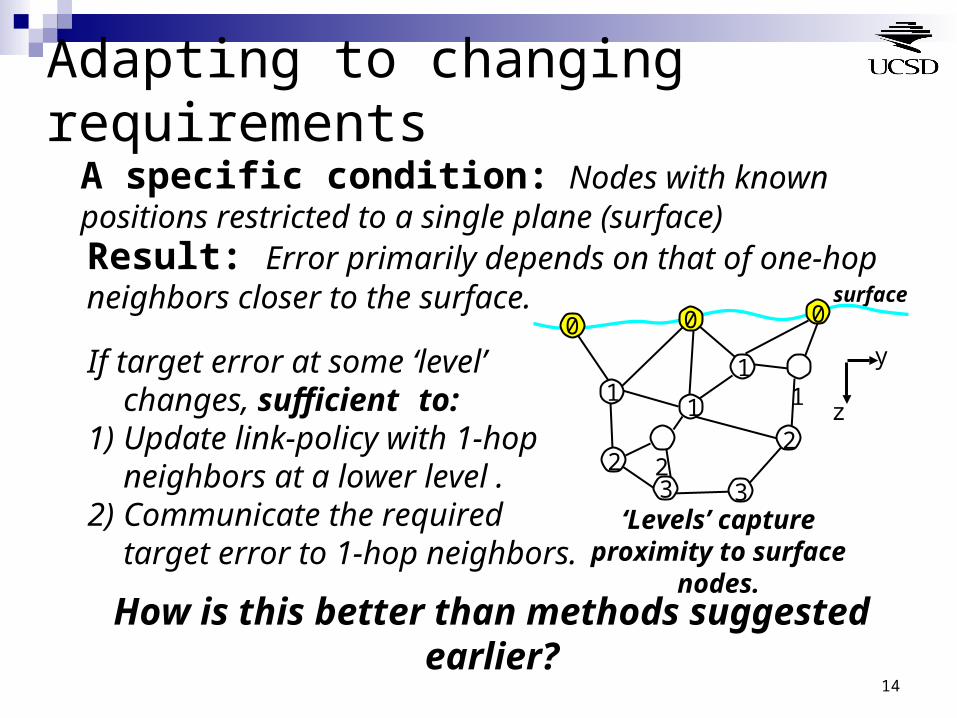
A specific condition: Nodes with known positions restricted to a single plane (surface)Result: Error primarily depends on that of one-hop neighbors closer to the surface.
‘Levels’ capture proximity to surface nodes.
surface
z
y0 00
11
12
1
22
33
If target error at some ‘level’ changes, sufficient to:
1) Update link-policy with 1-hop neighbors at a lower level .
2) Communicate the required target error to 1-hop neighbors.
How is this better than methods suggested earlier?
15
Adaptive Link-Selection
Figure 10. Adapting link selection policy
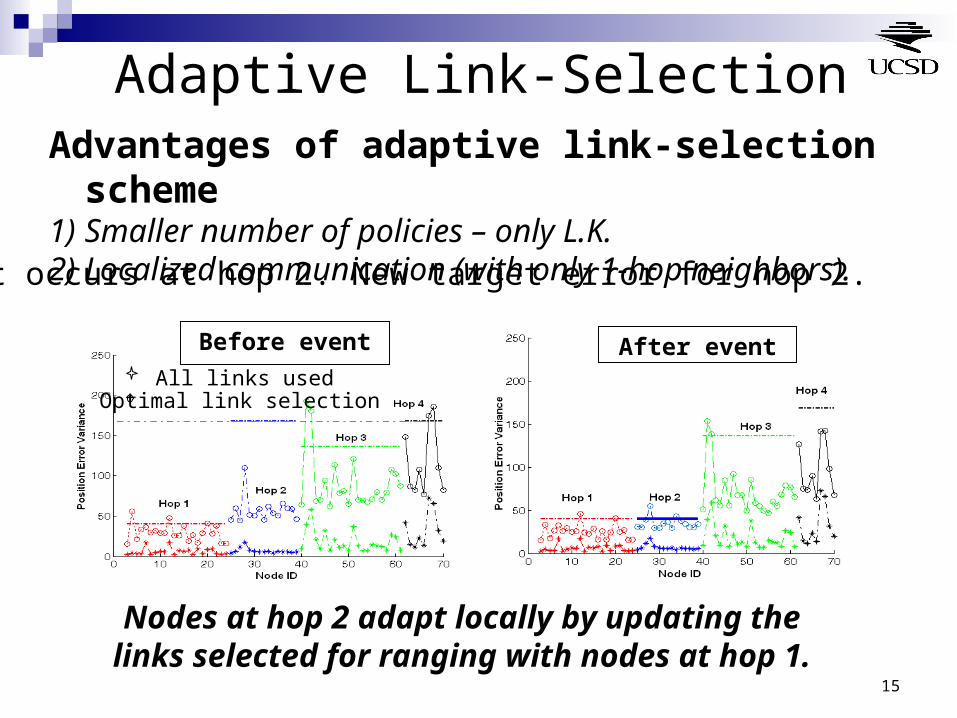
After eventBefore event
All links usedOptimal link selection
Advantages of adaptive link-selection scheme1) Smaller number of policies – only L.K.2) Localized communication (with only 1-hop neighbors).
Event occurs at hop 2. New target error for hop 2.
Nodes at hop 2 adapt locally by updating the links selected for ranging with nodes at hop 1.
16
Conclusions
t2t3
t7
0 100 200 300 400
0
100
200
300
mts
mts
t1
t1
t1t2
t6 t5 t4 t3
t7
t5t4 t6
t2
t3
t7t5t4 t6
drifter 1
drifter 2
drifter 3
Figure drawn roughly to scale
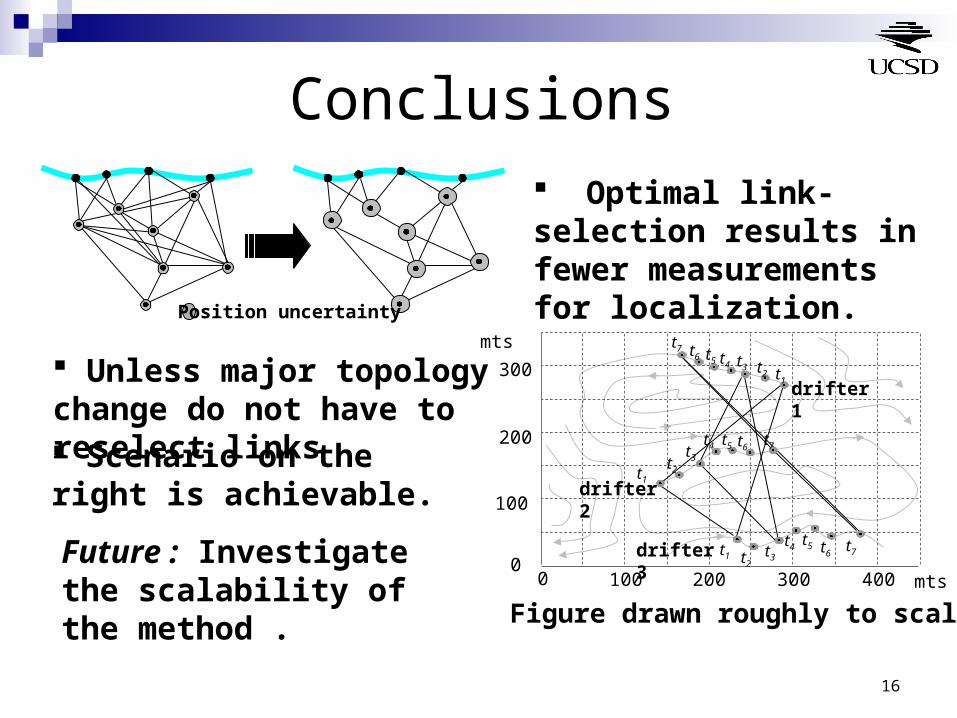
Future : Investigate the scalability of the method .
Position uncertainty
Optimal link-selection results in fewer measurements for localization.
Unless major topology change do not have to reselect links Scenario on the right is achievable.