1 interactive vehicle level human perfomance modeling presented by mr. tim lee dcs corporation 1330...
TRANSCRIPT

1
Interactive Vehicle Level Human Perfomance Modeling
Presented by
Mr. Tim Lee
DCS Corporation
1330 Braddock Place
Alexandria, VA 22302
Phone: 703-683-8430 X 203
Fax: 703-684-7229
2
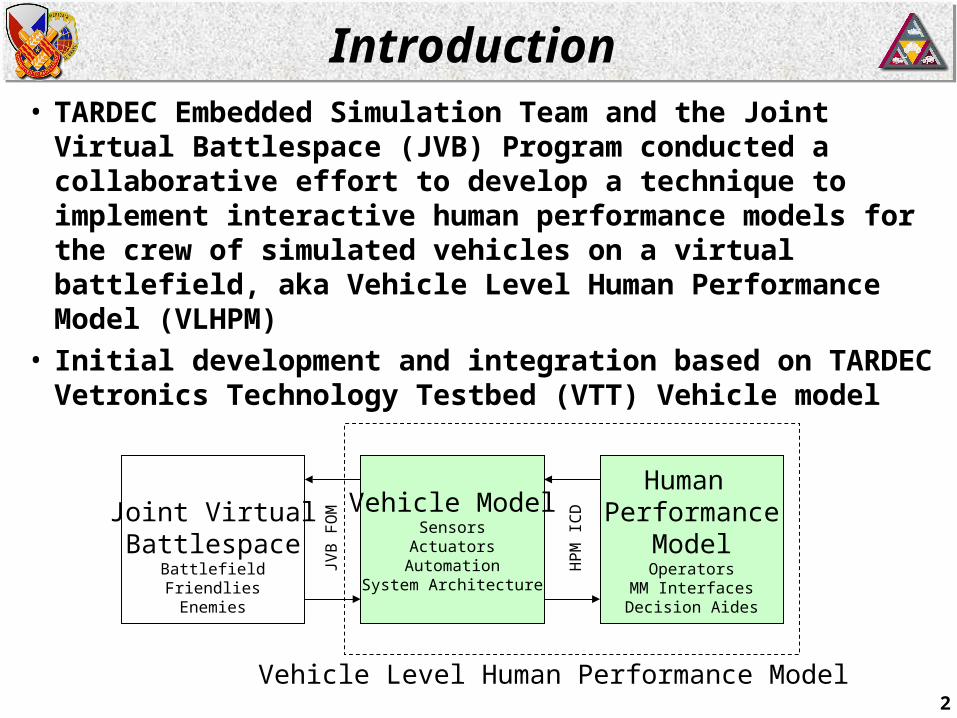
Introduction• TARDEC Embedded Simulation Team and the Joint
Virtual Battlespace (JVB) Program conducted a collaborative effort to develop a technique to implement interactive human performance models for the crew of simulated vehicles on a virtual battlefield, aka Vehicle Level Human Performance Model (VLHPM)
• Initial development and integration based on TARDEC Vetronics Technology Testbed (VTT) Vehicle model
Vehicle ModelSensors
ActuatorsAutomation
System Architecture
Joint VirtualBattlespace
BattlefieldFriendliesEnemies
Human Performance
ModelOperators
MM InterfacesDecision Aides
Vehicle Level Human Performance Model
JVB
FO
M
HP
M I
CD

3
Introduction (continued)
• VLHPM utilized ARL Human Research & Engineering Directorate’s Improved Performance Research Integration Tool (IMPRINT) by Micro Analysis & Design– Design event driven models (not scripted static models)– Utilize prioritized goals concept
• TARDEC expanded the effort to model operators of Command Vehicle (CV) and Armed Robotic Vehicle (ARV) in FCS LSI’s Unmanned Combat Demo
• Unmanned Combat Demo– Utilizing Crew integration & Automation Testbed (CAT) vehicle
assets– Evaluate maturity of key robotics technologies, CV / ARV concept
• Two CV operators; Two (or more) ARV operators
– Experiment with different operator to robotic asset ratios to determine optimum

4
Introduction (cont.)• CAT vehicle limitations for UCD
– Two man CAT crew– Experiments limited to two ARV operators; no
simultaneous CV operations
• Augmentation with constructive operator model– Four constructive operators, Two CV operators, two
ARV operators, feasible – Low cost additions and modifications of crew,
crewstation model– Low cost experimentation (vs with real HW, operator)– Mutual refinement and validation with real system

5
CV/ARV VLHPM OverviewCV/ARV Operator HPM
CVDpty
CVCdr
ARVOperator
1
ARVOperator
2
IMPRINT 6.0 Runtime
Vehicle I/F
CV/ARV Vehicle Model
Route/TacticsPlanner
New Stuff
ARVOperator
3
ARVOperator
n
Optional Stuff
Modified from VTT Model
COM
WSTAWGOE
JVB C3Grid
SurrogateSimulation ControlESS state/mode control, CGF controlAAR, data log control
CAT Vehicle Sensor simulationSensor motion, visualization, automation(ATR simulation, auto tracking)
CAT Vehicle Mobility SimulationAutomotive simulation, auto-driveNavigation sim
Communications SimulationJVMF message generation, reception
CAT vehicle Weapon simulationWeapon motion, control, round Flyout
Visualizer
CrewstationInterface
DIS / HLAInterface
UGV SimulationUGV/ARV mobility, tele-op, RSTA, OCSW, Javelin simulations
InternalOTB
Embedded Simulation System
Disabled when interfaced to external SAF
ControlStatus
External SAF EnvironmentDIS / JVB / RPR
OperationalCommands
Video (for monitoring)
Execution Time
Control

6
CV/ARV Vehicle Model
• Extensive modifications and additions to baseline model of VTT Embedded Simulation System (ESS)– Automation intensive CAT
architecture– Multiple UGV simulation
• Stryker variant for CV– Wheeled vehicle mobility
• Concept 5.5 ton wheeled ARVs with configurable payload– Weapon simulation based
on Cougar turret (OCSW, Javeline)
– Simulation of RSTA sensor, Target tracking sensor
– Semi-autonomous mobility
Example screen shot of vehicles. Not from actual experiments

7
CV/ARVHuman Performance Model
• IMPRINT Goal oriented task network paradigm– Goals can be prioritized
– Execution of tasks (task networks) to achieve a goal can be interrupted by execution of tasks of a higher priority goal
• Behavior models designed for real-time interaction, not static analysis– Operators are never loaded more than 100%
– Reactions to external stimuli represented as mutually exclusive prioritized goals
– Continuous main mission tasks that monitor for external stimuli
• Awareness and Interaction via MMI– Assume plausible level of automation
– Processing of audio visual input aggregated as a task load factor for each task
– Operations that require sight are approximated with, assisted by, or replaced by automation that provide digital data (route / tactics planner, Automated Target Recognition, Automated Target Tracking).
8
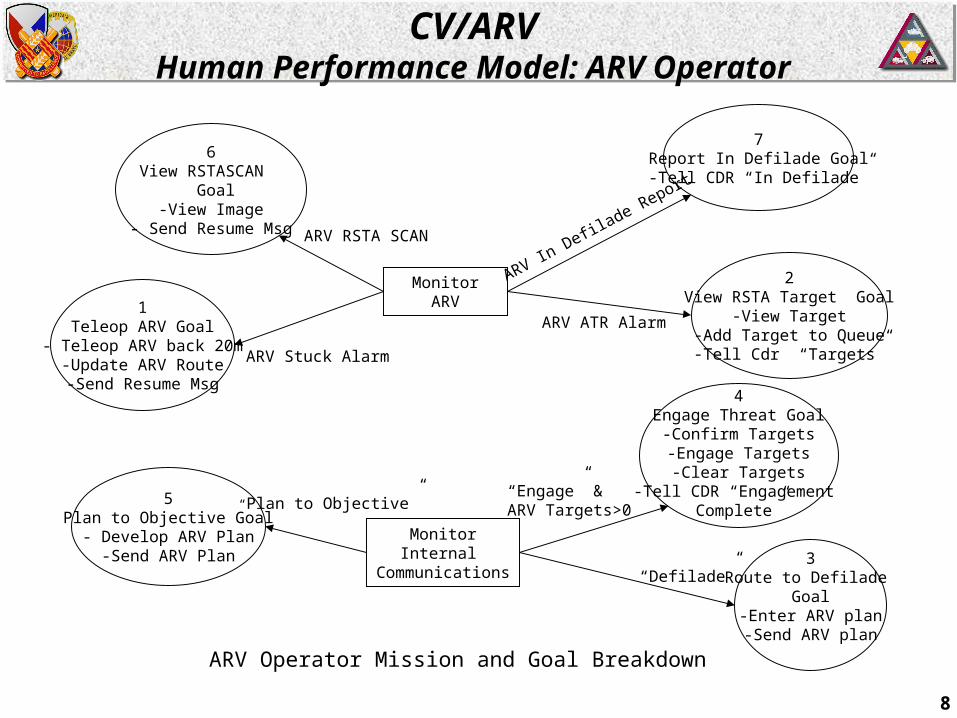
CV/ARVHuman Performance Model: ARV Operator
MonitorARV
MonitorInternal
Communications
2View RSTA Target Goal
-View Target-Add Target to Queue
-Tell Cdr “Targets”
4Engage Threat Goal
-Confirm Targets-Engage Targets-Clear Targets
-Tell CDR “Engagement Complete”
3Route to Defilade
Goal-Enter ARV plan-Send ARV plan
ARV ATR Alarm
6View RSTASCAN
Goal-View Image
- Send Resume Msg
1Teleop ARV Goal
- Teleop ARV back 20m-Update ARV Route-Send Resume Msg
7Report In Defilade Goal-Tell CDR “In Defilade”
ARV RSTA SCAN
ARV Stuck Alarm
“Engage” &ARV Targets>0
5Plan to Objective Goal- Develop ARV Plan
-Send ARV Plan
“Plan to Objective”
“Defilade”
ARV In Defilade Report
ARV Operator Mission and Goal Breakdown

9
CV/ARVHuman Performance Model: CV Commander
MonitorExternal
Communications
MonitorSurveillance
Systems
MonitorInternal
Communications
MonitorSelf Protection
Systems
1Process C2
Message Goal-Enter CV Route
-Tell ARV “Plan to Obj”-Set Fire Perm.= Free
-Tell DPTY “Drive Route”
5View Threat Goal-Confirm Targets
-Report Type=SPOT
4Engage Threat Goal
-Set Fire Perm.= Free-Confirm Targets-Engage Targets-Report Type=SIT
7Send C2
Report Goal-Enter C2 Report-Send C2 Report
C2 Alarm (Unit March)
CV ATR Alarm & !FREE
CV ATR Alarm & FREE
“At Destination”
Detonation & CV Targets>1
2Seek Defilade
Goal-Update CV Route
-Say “Defilade”
6Resume
Mission Goal-Update CV Route-Tell ARV “Plan
to Objective”-Report Type=SIT
“Targets &ARV Targets>1
“EngagementComplete”
3Unit Engage
GoalSay “Engage”
ARV Targets>1&Free&”In Defilade1” &”In Defilade2”& “At Destination”OR ARV Targets=1 & FREE
CV Commander Mission and Goal Breakdown

10
CV/ARVHuman Performance Model: CV Deputy/Driver
1Drive Route Goal
- Steer to Waypoint-Accelerate/Brake
to Waypoint-Say “At Destination”
MonitorInternal
Communications
“Drive Route”
CV Driver Mission and Goal Breakdown
11
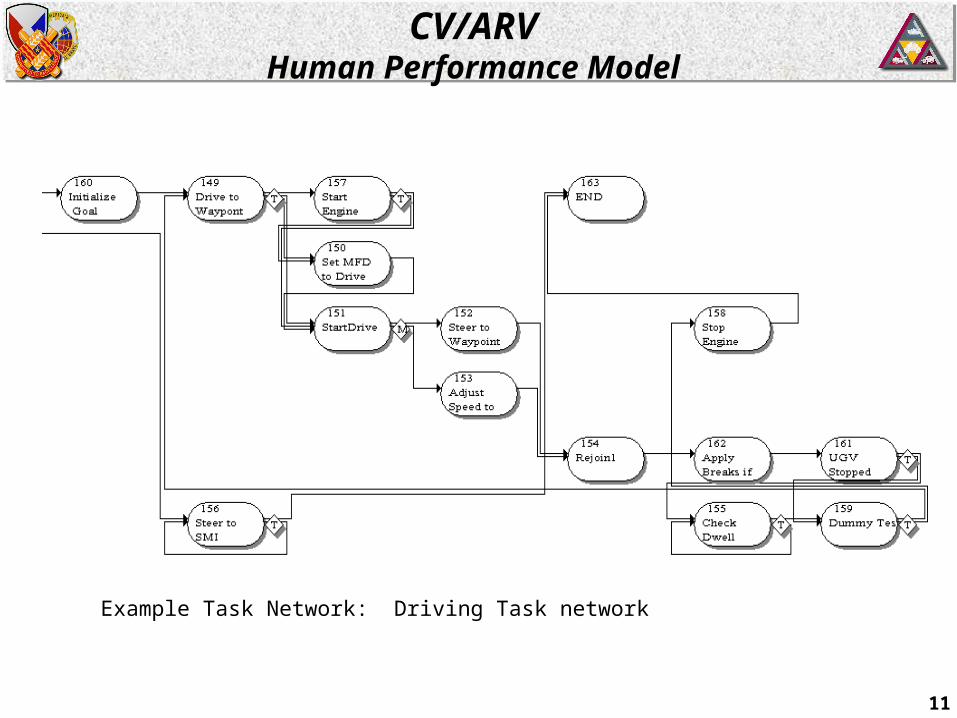
CV/ARVHuman Performance Model
Example Task Network: Driving Task network

12
CV/ARVHuman Performance Model: Automation
• Both “manual” and autonomous control of mobility designed to follow a route generated by a route / tactics planner– Considers terrain elevations
– Considers terrain type
– Manual control model adjusts actuator values in real time to keep vehicle on route
– Autonomous control model issues a “plan” that contains the route and RSTA scan commands to the vehicle model
• Target detection by RSTA Automatic Target Recognition• Target engagement with Automatic Target Tracking

13
CV/ARVHuman Performance Model: Automation
Pictorial representation of example terrain type data and generated routes Elevation data is not shown
Open Terrain Roads Non-traversable area
Non-traversable area
Routes for two ARVsAnd CV

14
CV/ARVHuman Performance Model: User Interface
• Real time display of Visual Auditory, Cognitive, Psychomotor (VACP) loading on each operator
• Real time indication of vehicle position navigation data
• All interfaces and data logging of IMPRINT 6.0

15
Experiments• Unmanned Combat Demo
– One CV, two ARVs– Initial integration demo of maneuvers
• Capstone Demo– One CV, one ARV– Limited participation due to risk mitigation
• Virtual Distributed Lab for Modeling & Simulation (VDLMS) First Application– One CV, one ARV– Modified vehicle model, and HPM for participation as a Forward
Observer / Laser Designator of “Netfires” concept evaluation• Maneuver in recon mission; • Spot report or call for fire (for Precision Attack Missile)• Perform laser designation
– Participated in majority of recorded runs simultaneously with CAT crewstations

16
Lessons Learned• Real-time interactive simulation of complex behaviors of combat
vehicle operator(s) is feasible – With goal oriented task model of IMPRINT– With a high fidelity vehicle model that has a rich, portable data interface– With sensor automation such as ATR, ATT that minimizes the need to
convert and process visual information
• Enhancements to IMPRINT can simplify dynamic HPM development, such as:– Nested IF or While constructs– Temporary variables in macros– Improved External Model Call facility– Inter-operability with cognitive models (SOAR, ACT-R)
• Improvement of command data protocol / interface is needed– JVB C3 grid interactions afforded limited flexibility– Direct manual command injection via a “C3 Grid surrogate” was
implemented for non-JVB experiments– Additional manual input of decision thresholds for target engagement
were added for First App

17
Future Plans• Enhancement of C3 interactions, processing, decision
making– Higher echelon platform(s) or organization– Improvement of C3 interaction protocols, data sets
• Run-time manual command input
• Simulation C2 interface: JVB, Netfires, MATREX
• Modeling of or integration with other automation or simulation tools– On board decision aids– Higher fidelity component or functionality models of VDLMS
(other HLA federates)– Integrated Unit Simulation System (IUSS) of SBCCOM– Cognitive simulation tools (ACT-R, SOAR)

18
Future Plans• Higher fidelity route / tactics planner
– Higher fidelity environment data– More rigorous algorithms
• Controlled data collection and analysis– Manned crewstations & HPM executing same operation (achieved
at First App, but not enough correlated data)– Compare HPM “predicted” performance with actual– Adjust HPM
• Continued support of simulation analysis objectives of FCS SDD– Enhancements based on all the above– CAT HPM developments in parallel with crewstation
enhancements / modifications – Unmanned Combat Demo II