1 lecture 4 coordinate systems: rectangular, cylindrical, spherical
Post on 21-Dec-2015
241 views
TRANSCRIPT

1
Lecture 4
Coordinate Systems: Rectangular, Cylindrical,
Spherical
2
We will use all three of these coordinate systems to represent
the position of a point P in 3-dimensional space.
In all three cases, position is defined in terms of the intersection
of 3 surfaces.

3
In each coordinate system, we shall define three coordinate variables
and three corresponding “unit vectors”. Each unit vector has unit length, and points in the direction of increasing value of the coordinate variable to which it corresponds.
4
All three coordinate systems are “mutually orthogonal”. This
means that their three unit vectors are mutually perpendicular. This
makes it easy to calculate dot and cross vector products. (Eg: All dot
products between pairs of unit vectors are zero!)
5
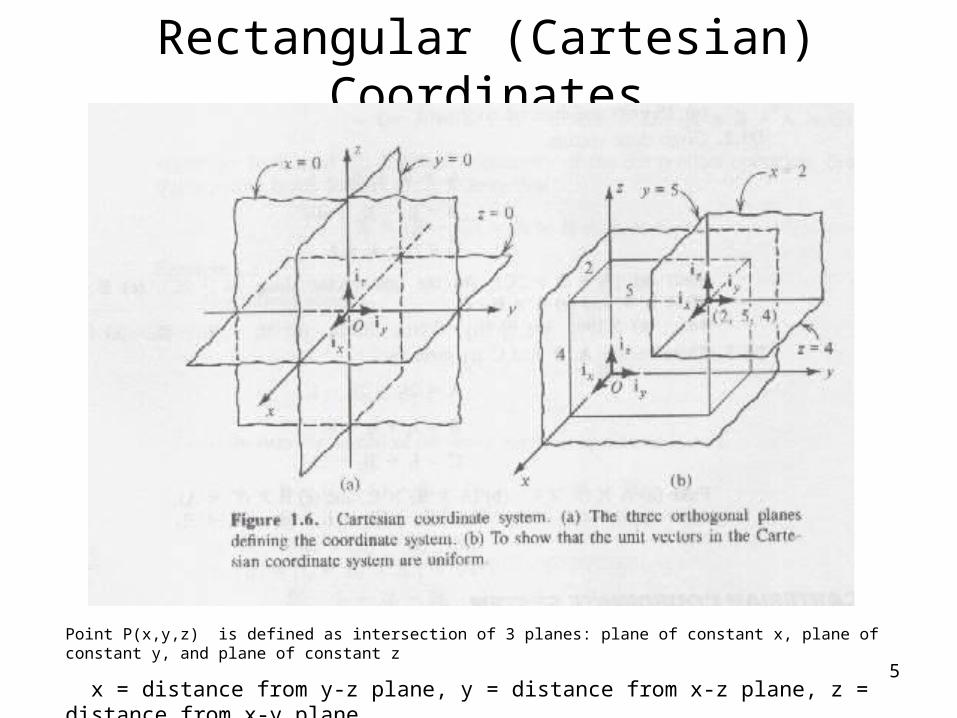
Rectangular (Cartesian) Coordinates
Point P(x,y,z) is defined as intersection of 3 planes: plane of constant x, plane of constant y, and plane of constant z
x = distance from y-z plane, y = distance from x-z plane, z = distance from x-y plane
6
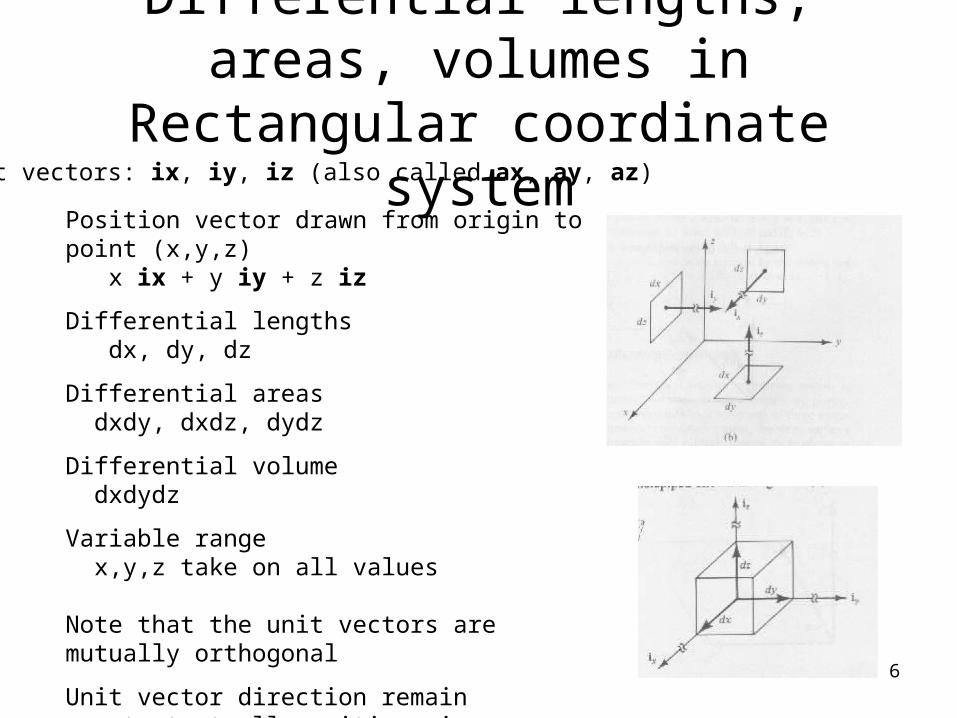
Differential lengths, areas, volumes in Rectangular coordinate system
Position vector drawn from origin to point (x,y,z) x ix + y iy + z iz
Differential lengths dx, dy, dz
Differential areas dxdy, dxdz, dydz
Differential volume dxdydz
Variable range x,y,z take on all values
Note that the unit vectors are mutually orthogonal
Unit vector direction remain constant at all positions in space.
Unit vectors: ix, iy, iz (also called ax, ay, az)
7
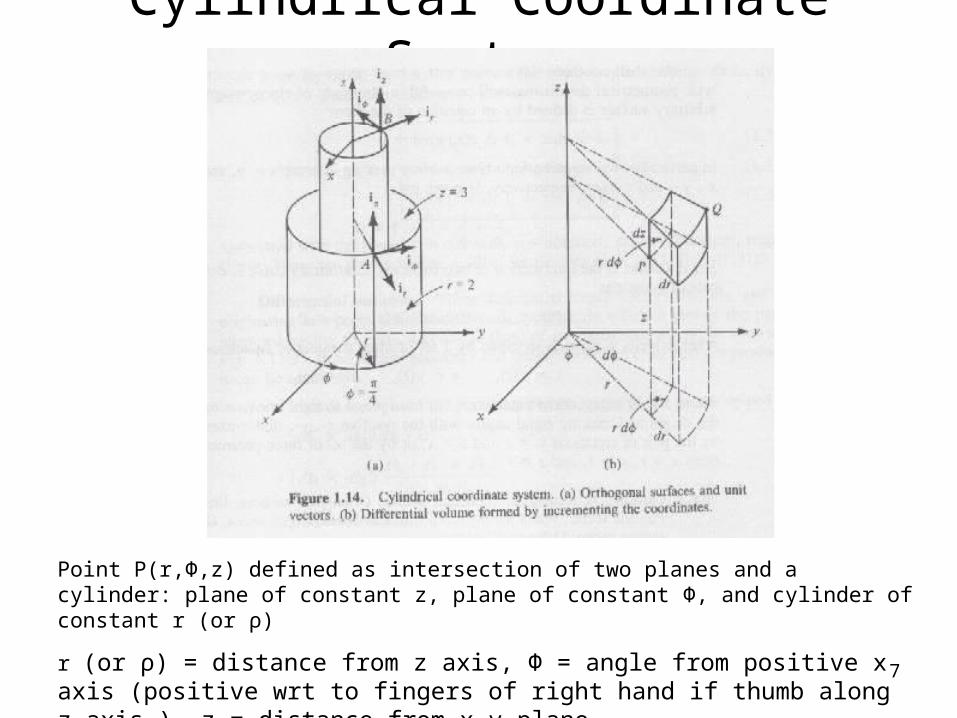
Cylindrical Coordinate System
Point P(r,Ф,z) defined as intersection of two planes and a cylinder: plane of constant z, plane of constant Ф, and cylinder of constant r (or ρ)
r (or ρ) = distance from z axis, Ф = angle from positive x axis (positive wrt to fingers of right hand if thumb along z axis.) z = distance from x-y plane
8
Differential lengths, areas, volumesUnit vectors: ir, iФ, iz (mutually orthogonal)
Position vector: r ir + z iz
Differential lengths: dr, rdФ, dz
Differential areas: rdФdr, drdz, rdФdz
Differential volume: rdФdrdz
Coordinate range: r = (0 to infinity),
Ф = (0 to 2π)
z = (-infinity to +infinity)
Useful for systems with cylindrical symmetry, but the iФ and ir unit vectors do not point in constant directions, but rather, their direction is a function of position.
9
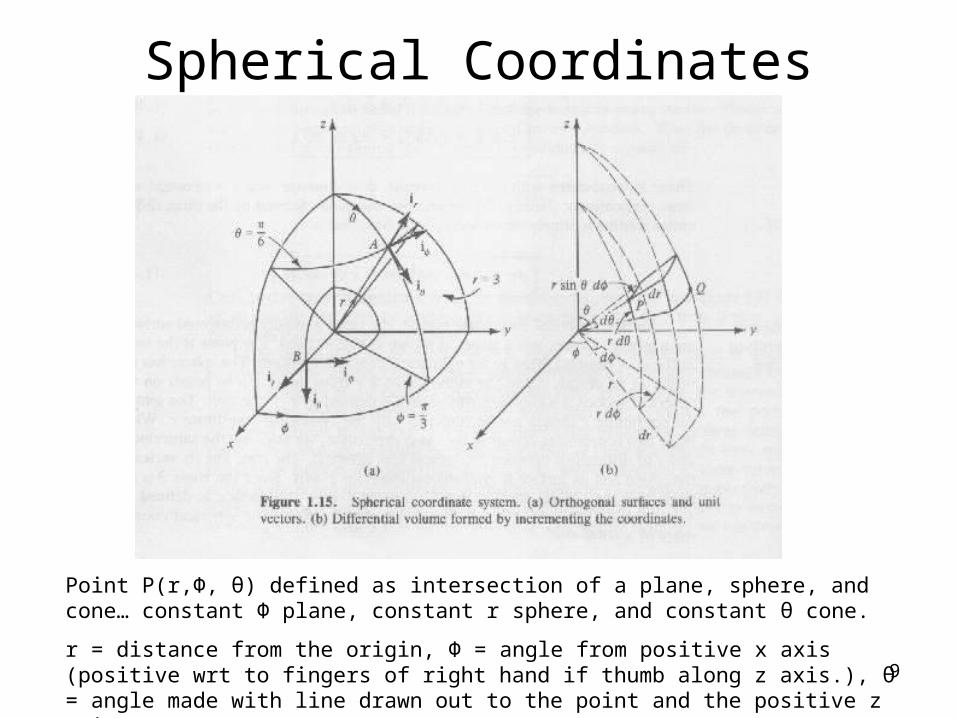
Spherical Coordinates
Point P(r,Ф, θ) defined as intersection of a plane, sphere, and cone… constant Ф plane, constant r sphere, and constant θ cone.
r = distance from the origin, Ф = angle from positive x axis (positive wrt to fingers of right hand if thumb along z axis.), θ = angle made with line drawn out to the point and the positive z axis
10
Differential lengths, areas, volumes
Unit vectors: ir, iФ, iθ (mutually orthogonal)Position vector: rir
Differential lengths: dr, rsinθdФ, rdθDifferential areas: rsinθdrdФ, rdrdθ, r2sinθdθdФDifferential volume: r2sinθdФdθdrCoordinate range: r = (0 to infinity), Ф = (0 to 2π) θ = (0 to π)Useful for systems with spherical symmetry, but none of the unit vectors have a constant direction. The direction of each unit vector is a function of position.
11
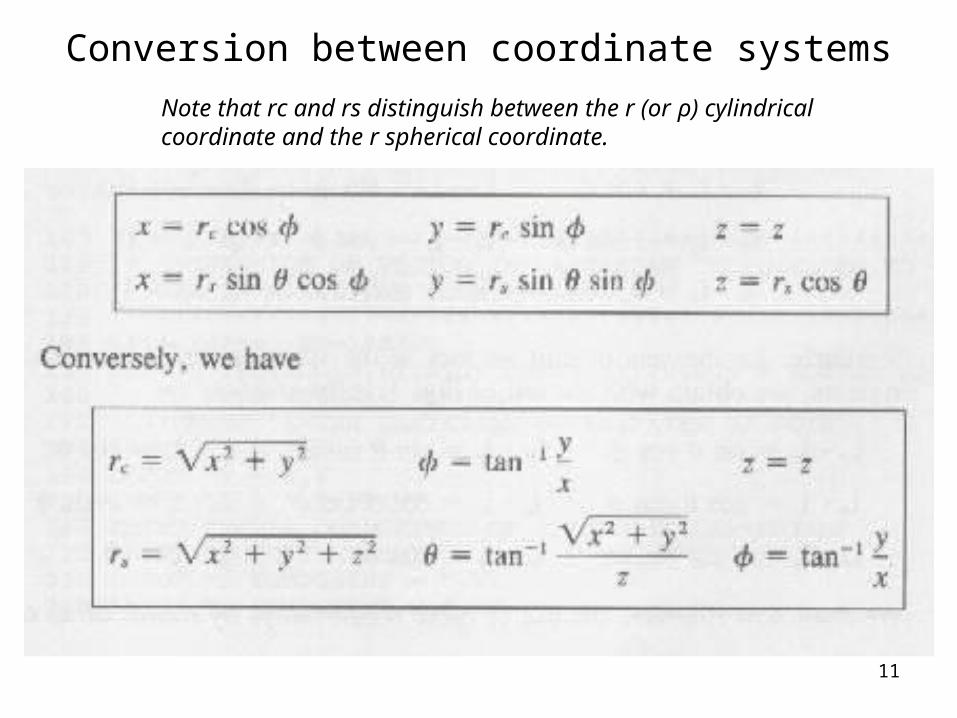
Conversion between coordinate systems
Note that rc and rs distinguish between the r (or ρ) cylindrical coordinate and the r spherical coordinate.
12
All three coordinate systems will be useful in this course, but we shall choose to use rectangular coordinates unless a compelling cylindrical or spherical symmetry
exists in the problem.