1 nlos identification using a hybrid toa-signal strength algorithm for underwater acoustic...
Post on 19-Dec-2015
217 views
TRANSCRIPT

1
NLOS Identification Using a Hybrid ToA-Signal Strength Algorithm for Underwater Acoustic Localization
By : Roee Diamant, Hwee-Pink Tan and Lutz LampeUniversity of British Columbia (UBC), Institute of InfoComm Research
**

Outline
The problem of NLOS identification in underwater acoustic localization
Channel Model and basic assumptions
An algorithm for obstacle NLOS classification
Sea trial results
2

3
The Problem of NLOS in Localization
Underwater acoustic attenuation models are hard to find -> Localization is mostly based on ToA distance estimation
Most existing underwater acoustic localization schemes, e.g., [1-5], implicitly assume that localization messages are received based on line-of-sight (LOS) acoustic links
Therefore, localization algorithms only consider ToA measurement noise (affected by e.g., time-synchronization, multipath, nodes motions)
However, obstacles in the channel may cause nonline-of-sight (NLOS) scenarios in which only echoes of the transmitted signal arrive at the receiver (Obstacle NLOS)
If not identified, Obstacle NLOS link considerably reduces localization accuracy
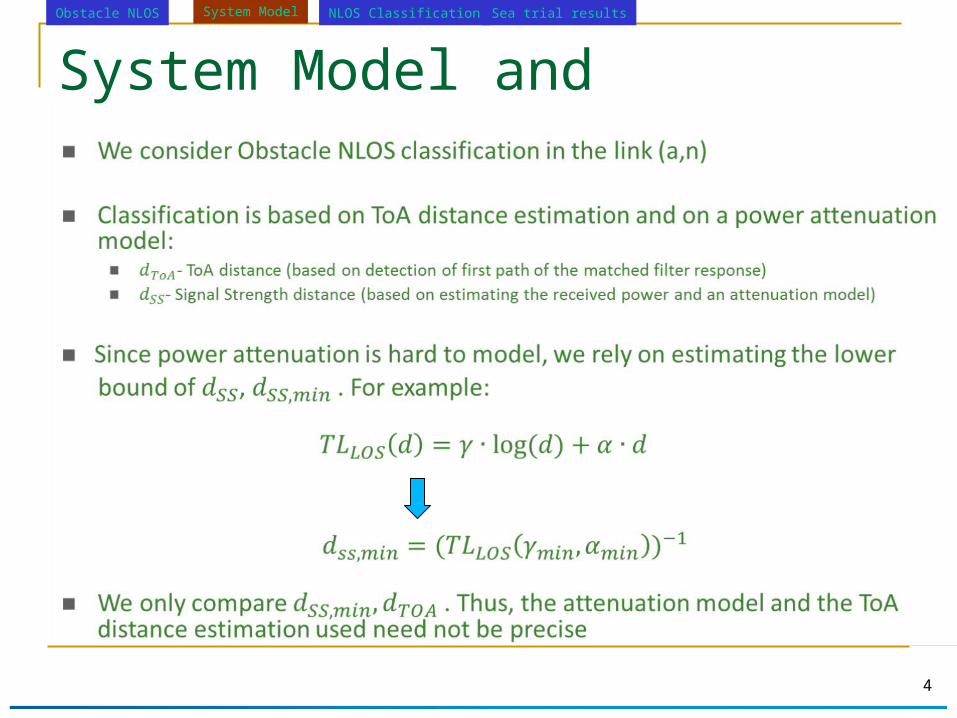
System Model and Assumptions
Obstacle NLOS System Model NLOS Classification Sea trial results
4

System Model and Assumptions (2)Obstacle NLOS System Model NLOS Classification Sea trial results
5
We expect considerable difference between ToA and signal strength distance estimations in an Obstacle NLOS link
Distance to the reflecting surface and to the destination

NLOS ClassificationObstacle NLOS System Model NLOS Classification Sea trial results
6
Efficacy of the algorithm relies on the validity of the assumption that the TS+SL component is much larger than the effects of measurement noise or attenuation model inaccuracies.

Performance AnalysisObstacle NLOS System Model NLOS Classification Sea trial results
7
Distance measurementnoise variance
“True” distance

SimulationsObstacle NLOS System Model NLOS Classification Sea trial results
8
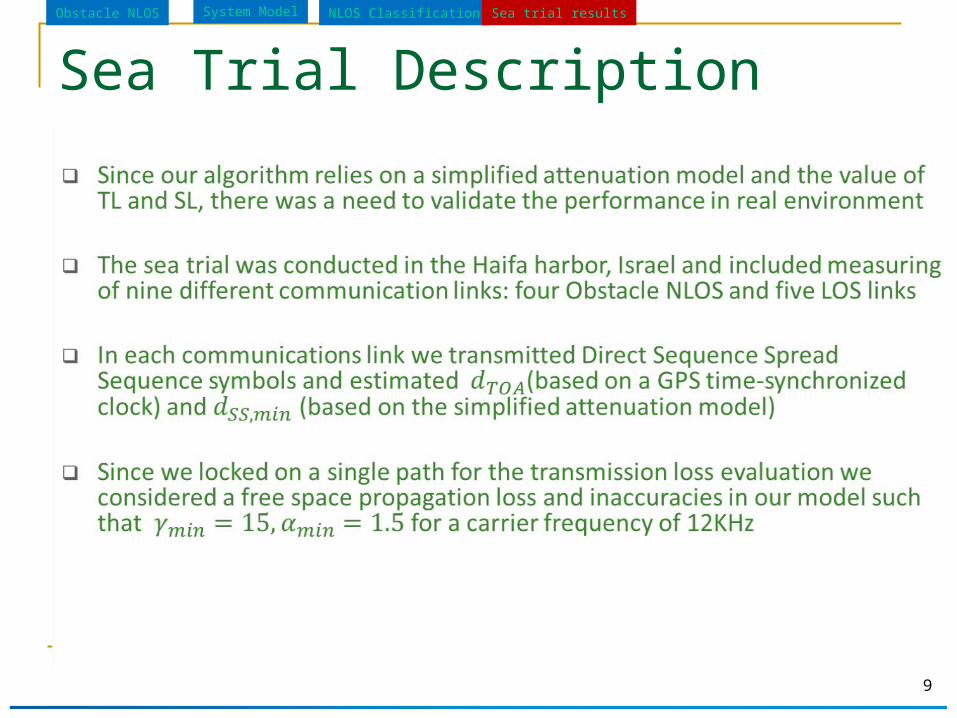
Sea Trial Description
Obstacle NLOS System Model NLOS Classification Sea trial results
9

Sea Trial ResultsObstacle NLOS System Model NLOS Classification Sea trial results
10
All Obstacle NLOS and LOS links were identified correctly
11
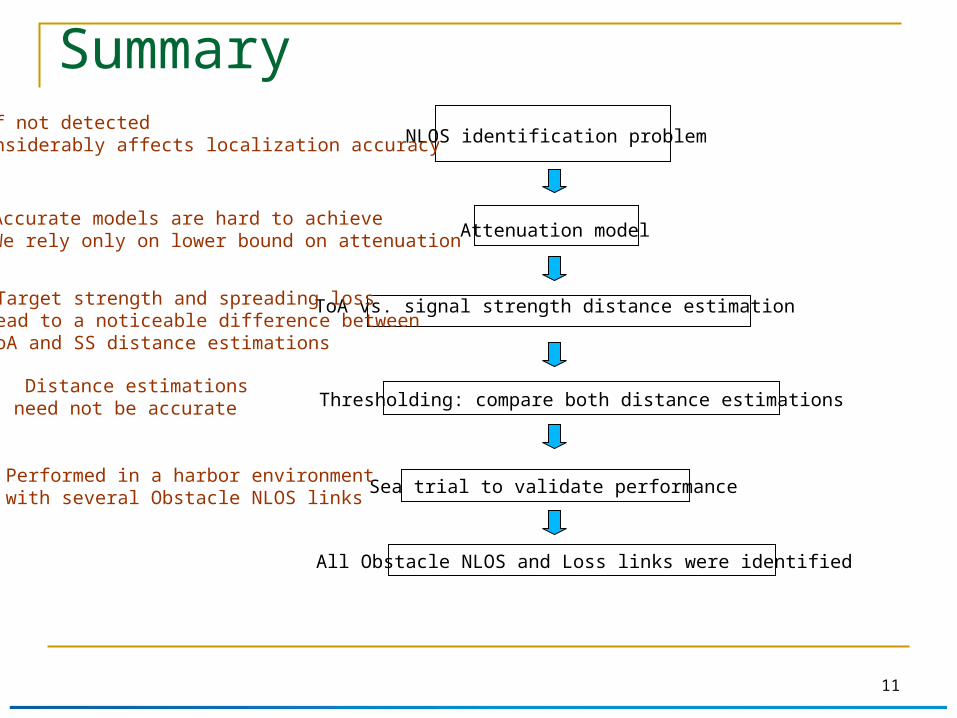
SummaryNLOS identification problem
If not detected,considerably affects localization accuracy
Attenuation modelAccurate models are hard to achieve.We rely only on lower bound on attenuation
Distance estimations need not be accurate
ToA vs. signal strength distance estimationTarget strength and spreading loss lead to a noticeable difference betweenToA and SS distance estimations
Sea trial to validate performancePerformed in a harbor environmentwith several Obstacle NLOS links
All Obstacle NLOS and Loss links were identified
Thresholding: compare both distance estimations
12
Reference list
[1 ]W. Burdic, “Underwater Acoustic System Analysis,” Los Altos, CA, USA: Peninsula Publishing, 2002
[2 ]X. Cheng, H. Shu, Q. Liang, and D. Du, “Silent Positioning in Underwater Acoustic Sensor Networks,” IEEE Trans. Veh. Technol ,. vol. 57,no. 3, pp. 1756–1766, May 2008.
[3 ]W. Cheng, A. Y. Teymorian, L. Ma, X. Cheng, X. Lu, and Z. Lu, “3D Underwater Sensor Network Localization,” IEEE Trans. on Mobile Computing, vol. 8, no. 12, pp. 1610–1621, December 2009 .
[4 ]L. Mu, G. Kuo, and N. Tao, “A novel ToA location algorithm using LOS range estimation for NLOS environments,” in
Proc. of the IEEE Vehicular Technology Conference (VTC), Melbourne, Australia, May 2006, pp. 594–598.
[5 ]S. Fischer, H. Grubeck, A. Kangas, H. Koorapaty, E. Larsson, and P. Lundqvist, “Time of arrival estimation of
narrowband TDMA signal for mobile positioning,” Proc. of the IEEE International Symposium on Personal, Indoor
and Mobile Radio Communications (PIMRC), pp. 451–455, September 1998.
[6] S. Woo, H. You, and J. Koh, “The NLOS mitigation technique for position loacation using IS-95 CDMA networks ”,
Proc. of the IEEE Vehicular Technology Conference (VTC), pp. 2556–2560, September 2000.
[7 ]P. C. Chen, “A non-line-of-sight error mitigation algorithm in location estimation,” Proc. of the IEEE Wireless
Communications and Networking Conference (WCNC), pp. 316–320, September 1999.
[8 ]L. Cong and W. Zhuang, “Non-line-of-sight error mitigation in TDoA mobile location,” Proc. of the IEEE International
Conference on Global Telecommunications (GlobeCom), vol. 1, pp. 680–684, November 2001
13
Thank you
Questions?