1 sample covariance based parameter estimation for digital communications javier villares piera...
TRANSCRIPT

1
SAMPLE COVARIANCE BASED PARAMETER
ESTIMATION FOR DIGITAL COMMUNICATIONS
Javier Villares Piera
Advisor: Gregori Vázquez Grau
Signal Processing for Communications Group
Dept. of Signal Processing and Communications
Technical University of Catalunya (UPC)

2
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS

3
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS

4
PROBLEM STATEMENT
( ) y A θ x wMULTIPLICATIVENON-GAUSSIAN
NOISE
ADDITIVE GAUSSIAN NOISE
ESTIMATE FROM KNOWING STATISTICS ON AND THE
PARAMETERIZATION OF THE PROBLEM
θ y ,x w( )A θ
OBSERVATION
PARAMETERS

5
ESTIMATION PERFORMANCE
2
2 2
( )
( ) ( )
( ) ( ) ( )
BIAS E
VAR E BIAS
MSE E BIAS VAR
y
y
y
θ e
θ e θ
θ e θ θ
( ) e θ θ y DEPENDS ON ANDθ yw
ESTIMATION ERROR
SELF-NOISE
MEASUREMENT NOISE
DETERMINISTIC CASE :
/fy y θLIKELIHOOD
x
6
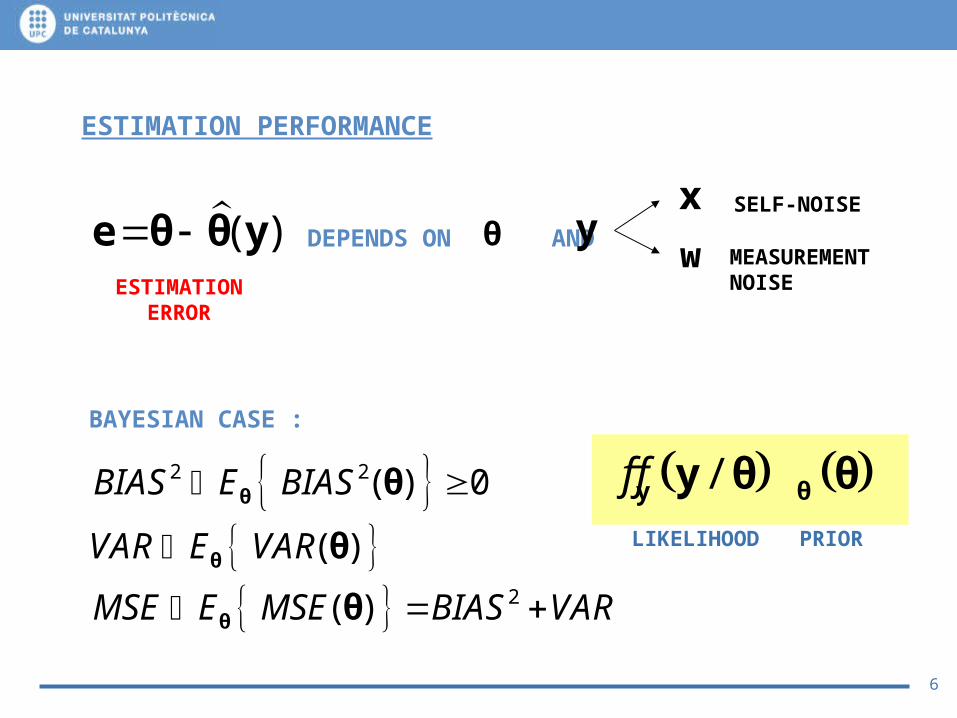
ESTIMATION PERFORMANCE
2 2
2
0
( )
( )
( )
BIAS E BIAS
VAR E VAR
MSE E MSE BIAS VAR
θ
θ
θ
θ
θ
θ
BAYESIAN CASE :
/f fy θy θ θPRIORLIKELIHOOD
( ) e θ θ y DEPENDS ON ANDθ yw
ESTIMATION ERROR
SELF-NOISE
MEASUREMENT NOISE
x

7
CLASSICAL ESTIMATION CRITERIA
1) MMSE:
2) MVU:
3) ML:
2mi n ( ) mi n ( ) ( )MSE BIAS VAR θ θ
θ θ θ
subject to mi n ( ) ( )MSE BIAS
θθ θ 0
argmax ( / )fyθ
y θ
GENERALLY, NOT REALIZABLE !!
ML MVU MMSEsmall-errorsmall-error
OPTIMALITY :
DIFFICULT !!
8
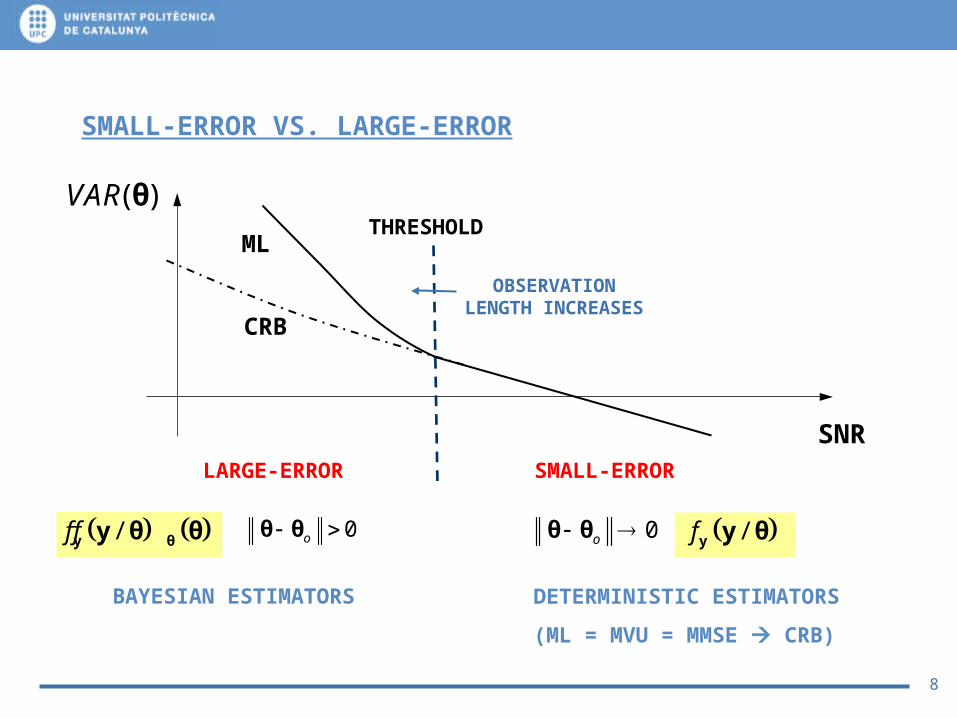
SMALL-ERROR VS. LARGE-ERROR
( )VAR θ
0o θ θ
SMALL-ERRORLARGE-ERROR
SNR
CRB
ML
OBSERVATION LENGTH INCREASES
THRESHOLD
DETERMINISTIC ESTIMATORS
(ML = MVU = MMSE CRB)
BAYESIAN ESTIMATORS
/f fy θy θ θ /fy y θ 0o θ θ

9
ESTIMATION WITH NUISANCE UNKNOWNS
/fy y θ / ,fy y θ x
CONDITIONALLIKELIHOOD
UNCONDITIONALLIKELIHOOD
NUISANCEPARAMETERS Ex
• Low-SNR UML
• GML x GAUSSIAN
• CML x CONTINUOUS,
DETERMINISTIC
?

10
ESTIMATION WITH NUISANCE UNKNOWNS
/fy y θ / ,fy y θ x
CONDITIONALLIKELIHOOD
UNCONDITIONALLIKELIHOOD
NUISANCEPARAMETERS Ex
• CML x CONTINUOUS,
DETERMINISTIC
?
QUADRATIC
• Low-SNR UML
• GML x GAUSSIAN

11
0 5 10 15 20 25 30 35 40 45 5010
-6
10-5
10-4
10-3
10-2
10-1
100
Es/No (dB)
Nor
mal
ized
Tim
ing
Var
ianc
eQUADRATIC ML-BASED ESTIMATORS COMPARISON
MCRB(x known)
Higher-order
Low-SNR UML
CML
GML

12
GAUSSIAN ASSUMPTION IN COMMUNICATIONS
fx x fx x
-1 1 -1 1
BPSK alphabet
(higher-order info)
Gaussian assumption
(mean and variance info)
?

13
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS

14
SECOND-ORDER ESTIMATOR
vec Hr yy
H θ b M rESTIMATOR
COEFFICIENTS ?
WITH
SAMPLE COVARIANCE VECTOR

15
ESTIMATOR OPTIMIZATION
• OPTIMUM b :2mi nBIAS
b
• OPTIMUM M :
2 subject to 0mi nVAR BIAS M
2 mi n mi n ( )MSE BIAS VAR M M
2 subject to mi n mi nVAR BIASM M
MVU
1)
2)
3) MVMB
MMSE
TRADE-OFF

16
M OPTIMIZATION: GEOMETRIC INTERPRETATION
(min MSE)M
(min VAR)M
(min BIAS2)MMVMB
MMSE
17
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
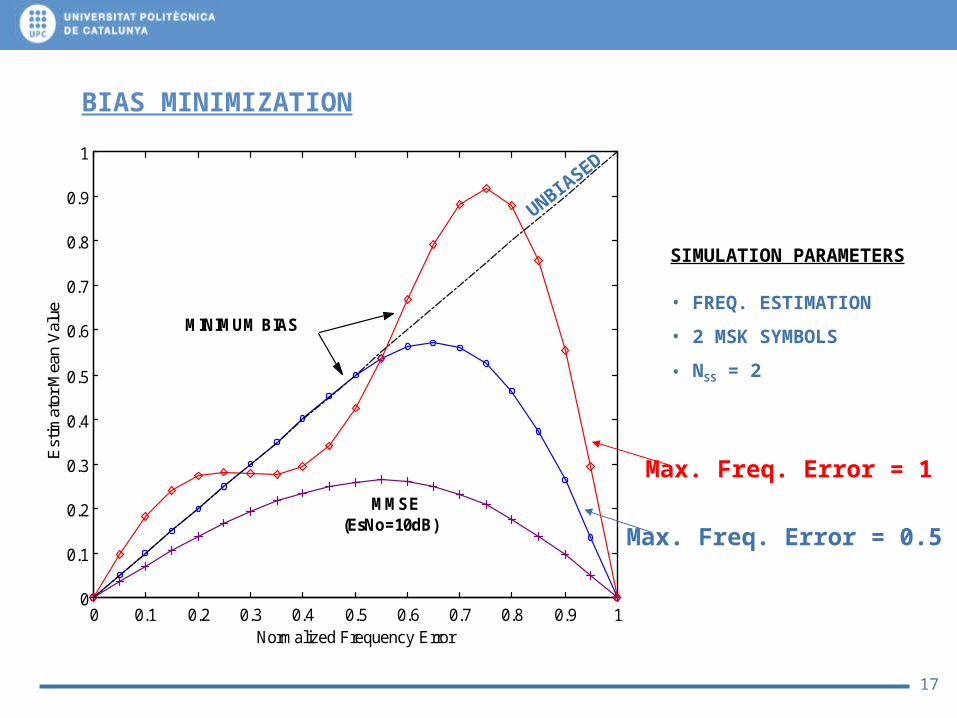
Normalized Frequency Error
Est
imat
or M
ean
Val
ue MINIMUM BIAS
MMSE(EsNo=10dB)
BIAS MINIMIZATION
SIMULATION PARAMETERS
• FREQ. ESTIMATION
• 2 MSK SYMBOLS
• NSS = 2
UNBIASED
Max. Freq. Error = 0.5
Max. Freq. Error = 1

18
VARIANCE ANALYSIS
Tr ( )HVAR E θM Q θ M
( ) ( ) ( )H
E yQ θ r r θ r r θ
WITHCOVARIANCE
MATRIX OF r
FOURTH-ORDER MOMENTS OF y

19
MATRIX Q()
* * *( ) ( ) ( ) ( ) ( ) ( ) ( )H
Q θ R θ R θ A θ A θ K A θ A θ
( ) ( ) ( (vec vec vec ) vec )H H H HE xK xx xx I I I
WITH
4TH ORDER CUMULANTS (KURTOSIS MATRIX)
NON-GAUSSIAN INFORMATION
K 0 IF x GAUSSIAN !!

20
KURTOSIS MATRIX
2 di ag vec( ) K I
WITH
4
22
x
x
E x
E x
TE xx 0
IF x IS
CIRCULAR
1
2
1 38.
1 32. 4TH TO 2ND ORDER RATIO
M-PSK
16-QAM
64-QAM
GAUSSIAN

21
-20 -10 0 10 20 30 40 50 6010
-4
10-3
10-2
10-1
100
101
Es/No (dB)
MS
E
QUADRATIC ESTIMATORS COMPARISON
SIMULATION PARAMETERS
• FREQ. ESTIMATION
• UNIFORM PRIOR (80% Nyq)
• 4 MSK SYMBOLS
• NSS = 2
Self-noise
MMSE
MVMB
min{BIAS2}
Priorvariance

22
4 8 12 16 20 24 28 32 36 40 4448
10-2
10-1
M
MS
E
Gaussian assumption
ASYMPTOTIC ANALYSIS
SIMULATION PARAMETERS
• FREQ. ESTIMATION
• UNIFORM PRIOR (80% Nyq)
• Es/No = 40dB
• MSK modulation
• NSS = 2
(# of samples)
2 0l i m l i mM M
MSE BIAS
MMSE
MVMB

23
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS

24
( )fθ θ
oθ
DELTA MEASURE
oθ
( )fθ θ
( )fθ θ
oθ
( )fθ θ
NOT INFORMATIVE ( )fθ θ VERY INFORMATIVE
LARGE-ERROR SMALL-ERROR

25
CLOSED-LOOP ESTIMATION AND TRACKING
DISCRIMINATORor DETECTOR
LOOP FILTERny
n oθ θ
SMALL-ERROR
(STEADY-STATE)
nθ
θ

26
BIAS MINIMIZATION (SMALL-ERROR)
oθ
θ
UNBIASED
( )BIAS θ
( )( )
o
o
BIASBIAS
θ θ
θθ 0
θ

27
BEST QUADRATIC UNBIASED ESTIMATOR (BQUE)
subject to ( )
mi n ( ) ( )o
o o
BIASVAR BIAS
Mθ θ
θθ θ 0
θ
11( ) ( ) ( )H Ho o r o rE
θ θ θ θ D Q θ D
AND WE OBTAIN THAT
2nd-ORDER FIM
LOWER BOUND ON THE VARIANCE OF ANY SECOND-ORDER
UNBIASED ESTIMATOR
K

28
FREQUENCY ESTIMATION PROBLEM
• 2REC MODULATION
• M=8 OBSERVATIONS (NSS=2)
• K=12 NUISANCE PARAM.
• 2REC MODULATION
• M=16 OBSERVATIONS (NSS=4)
• K=12 NUISANCE PARAM.
-10 0 10 20 30 40 50 6010
-6
10-5
10-4
10-3
10-2
10-1
100
Es/No (dB)
Var
ianc
e
Low-SNR UML
CML
GML
BQUEMCRB
UCRB
-10 0 10 20 30 40 50 6010
-6
10-5
10-4
10-3
10-2
10-1
100
Es/No (dB)
Var
ianc
e
Low-SNR UML
CML
GML
BQUEMCRB
UCRB
29
10 20 30 40 50 60 7010
-6
10-5
10-4
10-3
10-2
10-1
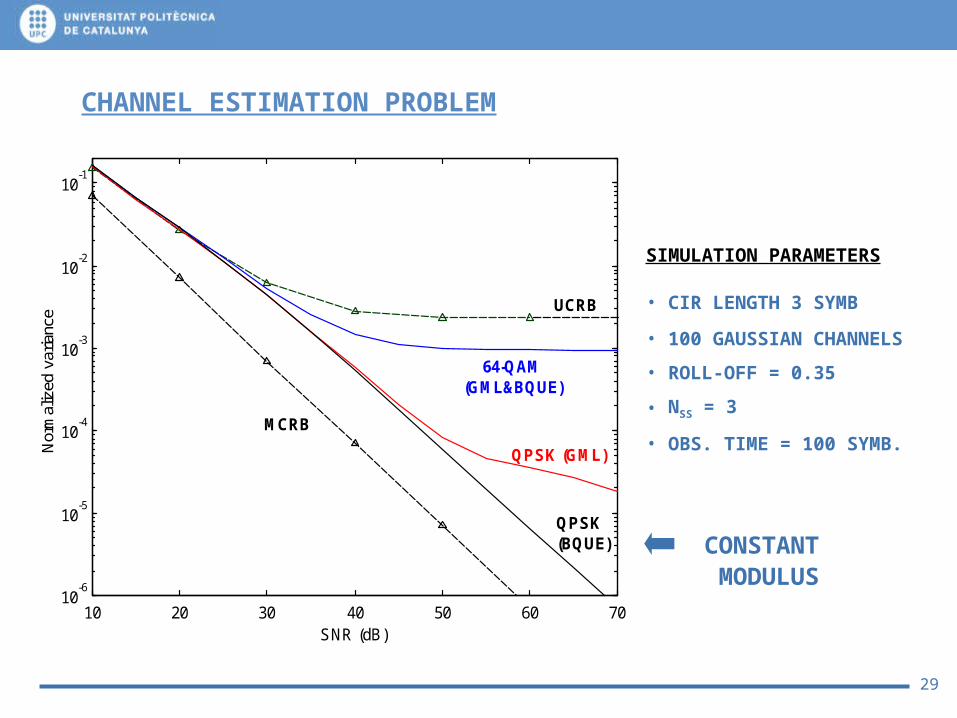
SNR (dB)
Nor
mal
ized
var
ianc
e
UCRB
QPSK (BQUE)
MCRB
QPSK (GML)
64-QAM (GML&BQUE)
CHANNEL ESTIMATION PROBLEM
SIMULATION PARAMETERS
• CIR LENGTH 3 SYMB
• 100 GAUSSIAN CHANNELS
• ROLL-OFF = 0.35
• NSS = 3
• OBS. TIME = 100 SYMB.
CONSTANT MODULUS

30
0 5 10 15 20 25 30 35 4010
-6
10-5
10-4
10-3
10-2
10-1
Es/No (dB)
Nor
mal
ized
Var
ianc
e
MCRB
Low-SNR ML
CML
GML
UCRB
BQUE
10 15 20 25 30 35 40 45 50 55 60
10-6
10-4
10-2
100
102
Es/No (dB)
Nor
mal
ized
Var
ianc
e
MCRB
UCRB
Low-SNR ML
CML
GML
BQUE
ANGLE-OF-ARRIVAL ESTIMATION PROBLEM
• M-PSK MODULATION
• 4 ANTENNA
• OBS. TIME = 400 SYMB
SEPARATION 10º SEPARATION 1º
• M-PSK MODULATION
• 4 ANTENNA
• OBS. TIME 3000 SYMB

31
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS
32
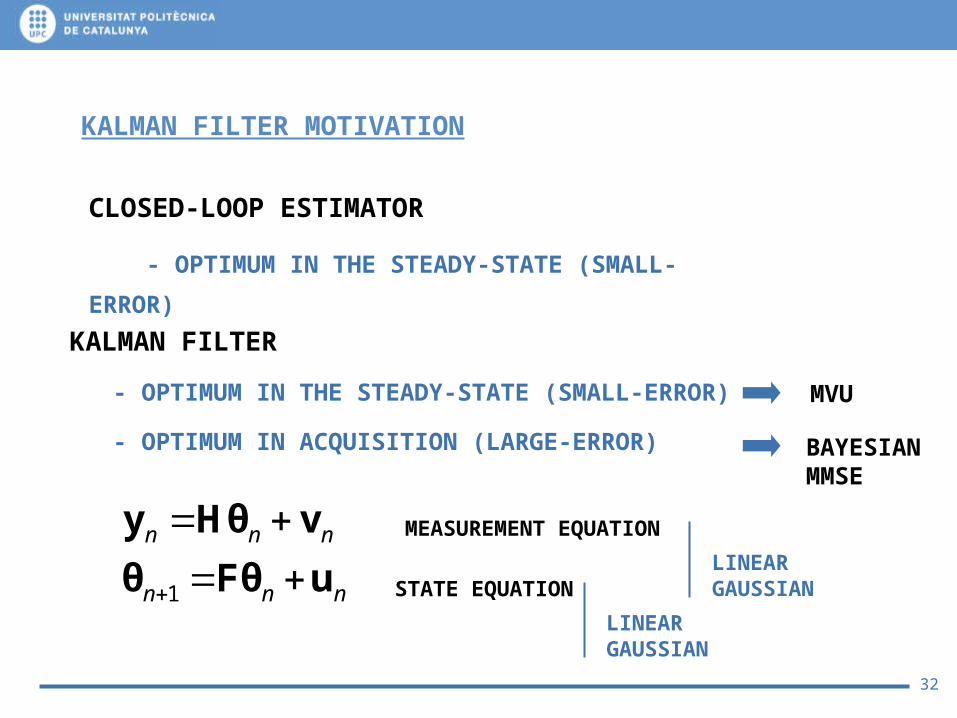
KALMAN FILTER MOTIVATION
1
n n n
n n n
y Hθ v
θ Fθ u
CLOSED-LOOP ESTIMATOR
- OPTIMUM IN THE STEADY-STATE (SMALL-ERROR)
KALMAN FILTER
- OPTIMUM IN THE STEADY-STATE (SMALL-ERROR)
- OPTIMUM IN ACQUISITION (LARGE-ERROR)
MEASUREMENT EQUATION
STATE EQUATIONLINEARGAUSSIAN
LINEARGAUSSIAN
MVU
BAYESIAN MMSE

33
KALMAN FILTER FORMULATION
1
n n n n
n n n
y A θ x w
θ f θ u
vec Hn n n n n n r y y h θ v θ
MEASUREMENT EQUATION
STATE EQUATION
ZERO-MEAN NONLINEAR IN
NONLINEAR IN
ZERO-MEAN
PROBLEM
QUADRATIC OBSERVATION
SAMPLE COV.
VECTOR
NONLINEAR
PROBLEMLINEARIZATION
(EKF FORMULATION)
- NON-GAUSSIAN- DEPENDS ON
( )Hn n nE v v Q θ

34
0 5 10 15 20 25 30 35 4010
-6
10-5
10-4
10-3
10-2
10-1
n (time)
MS
E
Gaussian Assumption
ACQUSITION RESULTS
SIMULATION PARAMETERS
• M-PSK MODULATION
• SNR = 40 dB
• 4 ANTENNAS
SEPARATION = 0.2
SEPARATION = 0.4

35
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS

36
-20 -10 0 10 20 30 40 50 60 7010
-6
10-5
10-4
10-3
10-2
10-1
100
101
102
Es/No (dB)
Nor
mal
ized
Var
ianc
e
BQUE
UCRB
high-SNR asymptote
low-SNR asymptote
GML
-20 -10 0 10 20 30 40 50 60 7010
-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
102
Es/No (dB)
Nor
mal
ized
Var
ianc
eBQUE
UCRB
high-SNR asymptote
low-SNR asymptote
GML
high-SNR asymptote
LOW AND HIGH SNR STUDY: DOA
• SEPARATION 1º
• M = 4 ANTENNAS
• SMALL-ERROR
• SEPARATION 1º
• M = 4 ANTENNAS
• SMALL-ERROR
16-QAM (MULTILEVEL) M-PSK (CONSTANT MODULUS)

37
-10 0 10 20 30 40 50 6010
-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
Es/No (dB)
Nor
mal
ized
Var
ianc
e
M=4,K=6
M=8, K=8
M=10, K=9
M=20, K=14
M
-10 0 10 20 30 40 50 6010
-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
Es/No (dB)
Nor
mal
ized
Tim
ing
Var
ianc
e
M=8, K=8
M=4,K=6
M
M=20, K=14
M=10, K=9
LARGE SAMPLE STUDY: DIGITAL COMMUNICATIONS
• M-PSK
• NSS = 2
• ROLL-OFF = 0.75
FREQUENCY SYNCHRO. TIMING SYNCHRO.
• M-PSK
• NSS = 2
• ROLL-OFF = 0.75

38
-10 0 10 20 30 40 5010
-7
10-6
10-5
10-4
10-3
10-2
10-1
100
Es/No (dB)
Nor
mal
ized
Var
ianc
e
=2 (UCRB)
=1.2
=1.01
=1.001
=1
asymptote for M
0 10 20 30 40 50 60 7010
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
Es/No (dB)
Nor
mal
ized
Var
ianc
e =2 (UCRB)
=1.2
=1.05
=1.01
=1.001
=1
asymptote for M
LARGE SAMPLE RESULTS: DOA
• M = 4 ANTENNAS
• SMALL-ERROR
• M = 4 ANTENNAS
• SMALL-ERROR
SEPARATION 10º SEPARATION 1º

39
101
102
10-12
10-11
10-10
10-9
10-8
10-7
10-6
M
Nor
mal
ized
Var
ianc
e
UCRB, GML
Asymptote for M
BQUE
101
102
10-14
10-12
10-10
10-8
10-6
10-4
M
Nor
mal
ized
Var
ianc
e
UCRB, GML
Asymptote for M
BQUE
LARGE SAMPLE RESULTS: DOA
• M-PSK ( = 1)
• EsNo = 60dB
• SMALL-ERROR
SEPARATION 10º SEPARATION 1º
• M-PSK ( = 1)
• EsNo = 60dB
• SMALL-ERROR

40
OUTLINE
1) INTRODUCTION
2) OPTIMAL SECOND-ORDER ESTIMATION
• LARGE-ERROR
• SMALL-ERROR
3) QUADRATIC EXTENDED KALMAN FILTER
4) SOME ASYMPTOTIC RESULTS
5) CONCLUSIONS

41
CONCLUSIONS
1. IN SECOND-ORDER ESTIMATION, THE GAUSSIAN ASSUMPTION
DOES NOT APPLY FOR
• MEDIUM SNR
• HIGH SNR WITH CONSTANT MODULUS NUISANCE UNKNOWNS,
IF THE OBSERVED VECTOR IS SHORT IN THE PARAMETER
DIMENSION (DOA vs. FREQ.)
2. IN THAT CASE, SECOND-ORDER ESTIMATORS CAN EXPLOIT THE
4TH ORDER INFO. ON THE NUISANCE PARAMETERS
KURTOSIS MATRIX K

42
FURTHER RESEARCH
1. IN MULTIUSER ESTIMATION PROBLEMS…
• CONSTANT MODULUS PROPERTY
• STATISTICAL DEPENDENCE IN CODED TRANSMISSIONS
2. ACQUISITION OPTIMIZATION
3. ESTIMATION AND DETECTION THEORY CONNECTION