1 systems intro intersections
TRANSCRIPT

Chapitre 2
Systems of Linear Equations
2.1 Introduction
Definition (Linear Equation). A linear equation is an equation of the form
a1x1 + a2x2 + . . .+ anxn = b
where– a1, a2, . . . , an are known constants called coefficients,– b is a known constant,– x1, x2, . . . , xn are variables that are unknown.
Example 1. 6x+ 3y = 2 is a linear equation (equation of a line !). But, 2xy − 3z3 = 8 is NOT alinear equation.
Note. Variables of linear equations occur only to the first power and do not appear as argumentsof, for example, trigonometric, logarithmic and exponential functions.
Definition (System of Linear Equations). A system of linear equations (or a linear system)is a collection of linear equations involving the same set of variables (or unknowns). A generalsystem of m equations in n variables x1, x2, . . . , xn, often referred to as an m × n system, can bewritten as
a11x1 + a12x2 + . . .+ a1nxn = b1
a21x1 + a22x2 + . . .+ a2nxn = b2...
... =...
am1x1 + am2x2 + . . .+ amnxn = bm
Note. a i j m× n
1

Example 2.
3x1 + x2 + x4 = 1
2x3 − x4 = 4
is a 2× 4 linear system.
Definition (Systems Terminology).
• An m × n system is said to be homogeneous if b1 = b2 = . . . = bm = 0. Otherwise, thesystem is said to be non-homogenenous.
• A solution of a linear system is an assignment of numbers to the variables such that all theequations are simultaneously satisfied.– A solution of an m × n linear system is a vectors [x1, x2, . . . , xn] ∈ R
n that satisfies allm equations simultaneously.
• A linear system is said to be consistent if it has at least one solution and inconsistent if ithas no solutions.
Example 3. Consider once again the system
3x1 + x2 + x4 = 1,
2x3 − x4 = 4.
(a) Is this a homogeneous system ?
(b) Determine if each of the following vectors is a solution to the system.
(a) [0, 0, 0, 1] (b) [1, 0, 1,−2]
Example 4. Consider the system
3x1 + x2 + x4 = 0,
2x3 − x4 = 0.
(a) Is this a homogeneous system ?
(b) Determine if each of the following vectors is a solution to the system.
(a) [0, 0, 0, 0] (b) [1, 0, 1,−2]
Note. [0, 0, . . . , 0] ∈ Rn is ALWAYS a solution of a homogeneous m×n linear system. Therefore,
a homogeneous linear system is ALWAYS consistent.
2
2.2 Intersections
2.2.1 Intersection of Two Lines in Two-Space
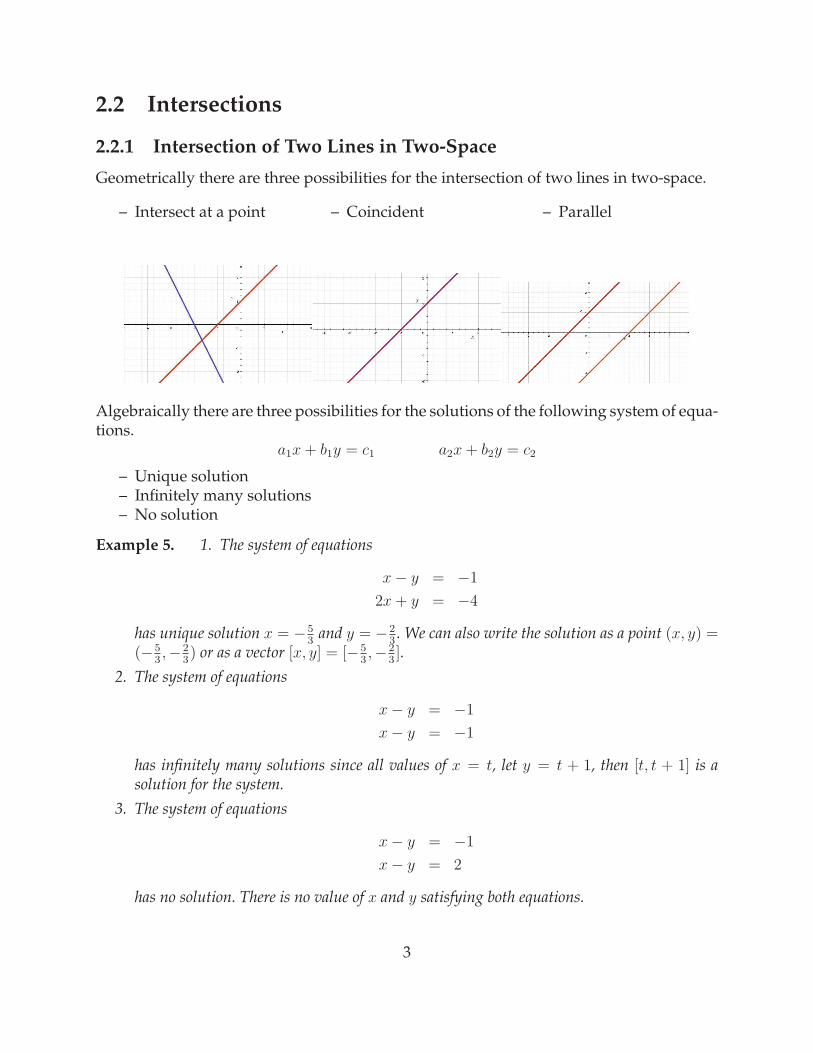
Geometrically there are three possibilities for the intersection of two lines in two-space.
– Intersect at a point – Coincident – Parallel
Algebraically there are three possibilities for the solutions of the following system of equa-tions.
a1x+ b1y = c1 a2x+ b2y = c2
– Unique solution– Infinitely many solutions– No solution
Example 5. 1. The system of equations
x− y = −1
2x+ y = −4
has unique solution x = −5
3and y = −2
3. We can also write the solution as a point (x, y) =
(−5
3,−2
3) or as a vector [x, y] = [−5
3,−2
3].
2. The system of equations
x− y = −1
x− y = −1
has infinitely many solutions since all values of x = t, let y = t + 1, then [t, t + 1] is asolution for the system.
3. The system of equations
x− y = −1
x− y = 2
has no solution. There is no value of x and y satisfying both equations.
3

2.2.2 Intersection of Two Lines in Three-Space
Geometrically there are four possibilities for the intersection of two lines in three-space.
– Intersect at a point– Coincident
– Parallel– Skew (not parallel and not intersect)
Algebraically there are three possibilities for the solutions of the following system of equa-tions.
[x, y, z] = [x0, y0, z0] + s[m1,m2,m3]
[x, y, z] = [a0, b0, c0] + t[n1, n2, n3]
– Unique solution (intersect at a point)– Infinitely many solutions (coincident)– No solution (parallel or skew)
Example 6. Consider the system of equations
[x, y, z] = [7, 2,−6] + s[2, 1,−3], 1©
[x, y, z] = [3, 9, 13] + t[1, 5, 5]. 2©
4
2.2.3 Intersection of a Line and a Plane in Three-Space
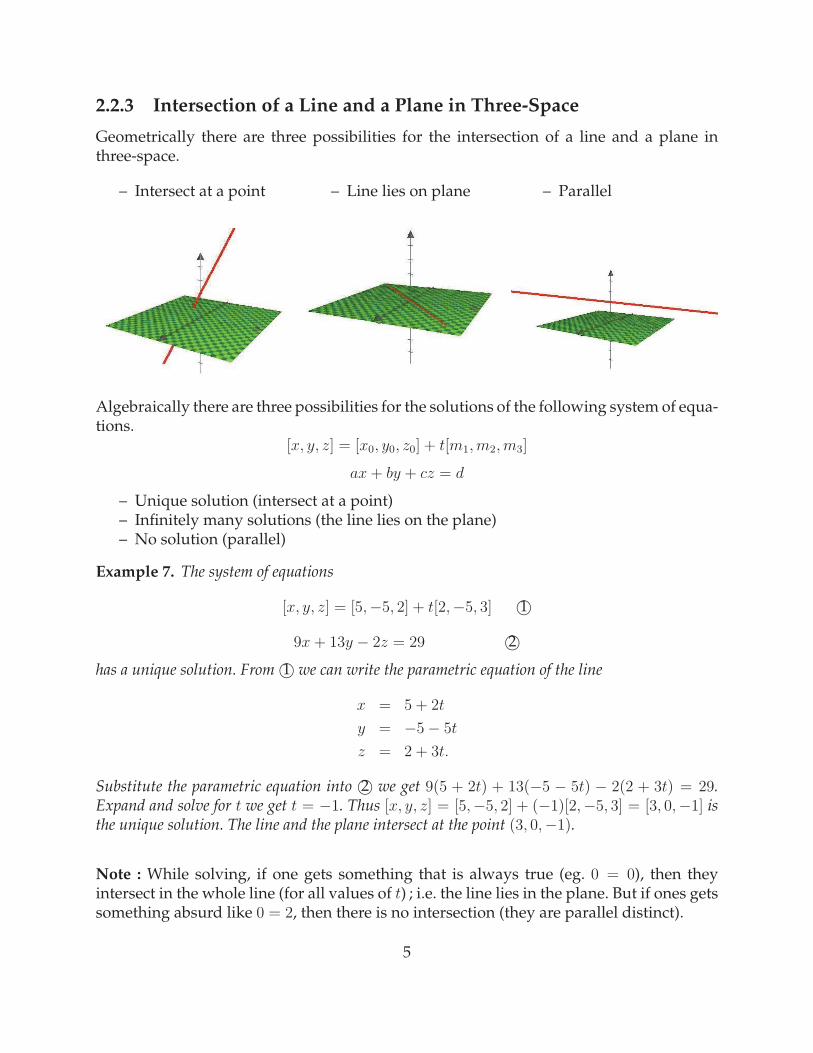
Geometrically there are three possibilities for the intersection of a line and a plane inthree-space.
– Intersect at a point – Line lies on plane – Parallel
Algebraically there are three possibilities for the solutions of the following system of equa-tions.
[x, y, z] = [x0, y0, z0] + t[m1,m2,m3]
ax+ by + cz = d
– Unique solution (intersect at a point)– Infinitely many solutions (the line lies on the plane)– No solution (parallel)
Example 7. The system of equations
[x, y, z] = [5,−5, 2] + t[2,−5, 3] 1©
9x+ 13y − 2z = 29 2©
has a unique solution. From 1© we can write the parametric equation of the line
x = 5 + 2t
y = −5− 5t
z = 2 + 3t.
Substitute the parametric equation into 2© we get 9(5 + 2t) + 13(−5 − 5t) − 2(2 + 3t) = 29.Expand and solve for t we get t = −1. Thus [x, y, z] = [5,−5, 2] + (−1)[2,−5, 3] = [3, 0,−1] isthe unique solution. The line and the plane intersect at the point (3, 0,−1).
Note : While solving, if one gets something that is always true (eg. 0 = 0), then theyintersect in the whole line (for all values of t) ; i.e. the line lies in the plane. But if ones getssomething absurd like 0 = 2, then there is no intersection (they are parallel distinct).
5

2.2.4 Intersection of Two Planes in Three-Space
Geometrically there are three possibilities for the intersection of two planes in three-space.
– Intersect in a line – Coincident – Parallel
Algebraically there are two possibilities for the solutions of the following system of equa-tions.
a1x+ b1y + c1z + d1 = 0
a2x+ b2y + c2z + d2 = 0
– Infinitely many solutions (intersect in a line or coincident)– No solution (parallel)
Example 8. Consider the following system of equations.
2x− y + z − 1 = 0 1©
x+ y + z − 6 = 0 2©
Solution : The normal vector for the plane 1© is ~n1 = [2,−1, 1] and the normal vectorfor the plane 2© is ~n2 = [1, 1, 1]. Since ~n2 is not a scalar multiple of ~n1, we know that ~n2
is not parallel to ~n1. Thus the two planes must intersect in a line. We want to write theparametric equation and the vector equation of the intersection line. Let 1©− 2©, we get
x− 2y + 5 = 0 3©.
We introduce a parameter by letting y = t. Then by 3© we get x = −5 + 2t. By 2© we havez = 6− x− y = 6− (−5 + 2t)− t = 11− 3t. So the parametric equation of the line is
x = −5 + 2t
y = 0 + t
z = 11− 3t.
The vector equation of the line is
[x, y, z] = [−5, 0, 11] + t[2, 1,−3].
6

2.2.5 Intersection of Three Planes in Three-Space
Geometrically there are eight possibilities for the intersection of two planes in three-space.
1 Intersect at a point.2 Intersect in a line.3 Three planes are coincident.4 Two planes are coincident and the third plane is not parallel.5 Three planes are parallel.6 Two planes are coincident and the third plane is parallel to the first two planes.7 Two planes are parallel and the third plane is not parallel.8 Pairs of planes intersect in lines that are parallel.
Algebraically there are three possibilities for the solutions of the following system of equa-tions.
a1x+ b1y + c1z + d1 = 0
a2x+ b2y + c2z + d2 = 0
a3x+ b3y + c3z + d3 = 0
– Unique solution (1)– Infinitely many solutions (2-4)– No solution (5-8)
7

Example 9. The following three planes intersect in a line. Determine the parametric equation andthe vector equation of the line.
x− 5y + 2z − 10 = 0 1©
x+ 7y − 2z + 6 = 0 2©
8x+ 5y + z − 20 = 0 3©
Solution : Let 2©− 1©, we get
12y − 4z + 16 = 0 4©.
Let (−8)× 1©+ 3©, we get
45y − 15z + 60 = 0 5©.
Let 1
4× 4©− 1
15× 5©, we get
0 = 0 0©
which is true for all values of y and z.
** 1
4× 4©− 1
15× 5© = 1
4× ( 2©− 1©)− 1
15((−8)× 1©+ 3©) = 0© which implies 3© = 17
4× 1©+ 15
4× 2©.
**
We introduce a parameter by letting z = t. Then y = −4
3+ 1
3t by 4© or 5©. By 1©, we get
x = 5y− 2z+10 = 5(−4
3+ 1
3t)− 2t+10 = 10
3− 1
3t. So the parametric equation of the line is
x =10
3−
1
3t
y = −4
3+
1
3t
z = 0 + t.
The vector equation of the line is
[x, y, z] = [10
3,−
4
3, 0] + t[−
1
3,1
3, 1].
8