21 september 2005rotor capstone workshop parallel, real-time garbage collection daniel spoonhower...
Post on 20-Dec-2015
214 views
TRANSCRIPT

21 September 2005 Rotor Capstone Workshop
Parallel, Real-Time Garbage Collection
Daniel SpoonhowerGuy Blelloch, Robert Harper, David Swasey
Carnegie Mellon University

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 2
Motivation: Support Real-Time in C#
Real-time requires predictability Focus on garbage collection in this work Real-time collection must be:
predictable – allow programmers to reason about code
efficient – RT apps must meet deadlines scalable – multi-threaded apps
multi-threaded GC
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 3
Our Results
Collector implementation available online incremental GC w/ stacklets real-soon-now C# benchmarks also available
Published work in VEE ’05 using residency to balance GC tradeoffs dynamically adapt to application behavior
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 4
Outline of Talk
1. Implementing a real-time collector incremental collection challenges in Rotor
2. Using residency to balance GC tradeoffs between copying and non-copying GC semantic constraints (e.g. pinning) use of space and time (i.e. overhead)
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 5
Incremental Collection
Divide collector work into small pieces interleave collector execution with application avoid long interruptions of application divide call stack into fixed size stacklets typical metric: (minimum) mutator utilization

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 6
Minimum Mutator Utilization (MMU)
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 7
Building on Previous Work
We extend replicating copying collection Nettles & O’Toole; Cheng & Blelloch based on semi-space copying collection good time bounds, high space overhead
Rotor requires GC to support pinned objects part of foreign function interface determined by programmer
Incompatible with pure copying GC!
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 8
Outline of Talk
1. Implementing a real-time collector incremental collection challenges in Rotor
2. Using residency to balance tradeoffs between copying and non-copying GC semantic constraints (e.g. pinning) use of space and time (i.e. overhead)
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 9
Adaptive Hybrid Collection
Bartlett: mostly copying collection reduce fragmentation in constrained GC
We extend this to uniformly account for: pinned objects large objects densely populated pages

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 10
Mostly Copying Collection
“Copy objects. . .most of the time.”
Key ideas: divide heap into pages determine strategy for each page dynamically:
objects may be evacuated or promoted in place
Gain benefits of both copying and non-copying collection
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 11
Mostly Copying Collection
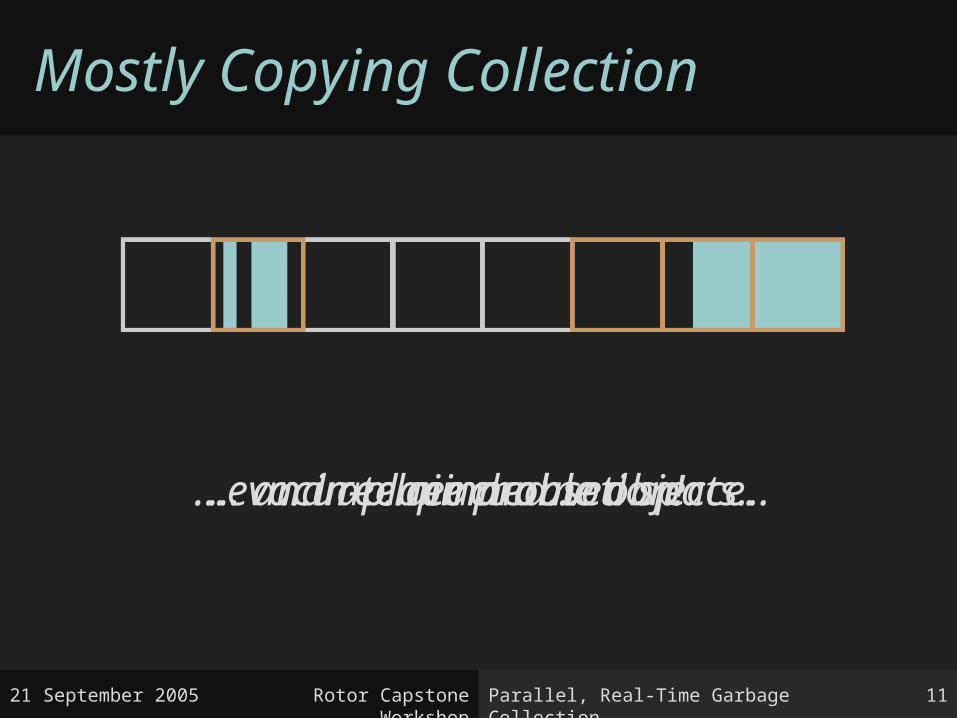
divide heap into pages……reserve pages for allocation…...allocate objects……begin collection……flip……some objects are unreachable……evacuate reachable objects……pinned……in-place promotion!... and reclaim unused space.
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 12
Don’t Relocate Large Objects
Large objects often relegated to separate heap . . . because they are expensive to copy
We use in-place promotion instead. avoids usual penalties of copying large objects no additional heap space required use small objects to fill in gaps
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 13
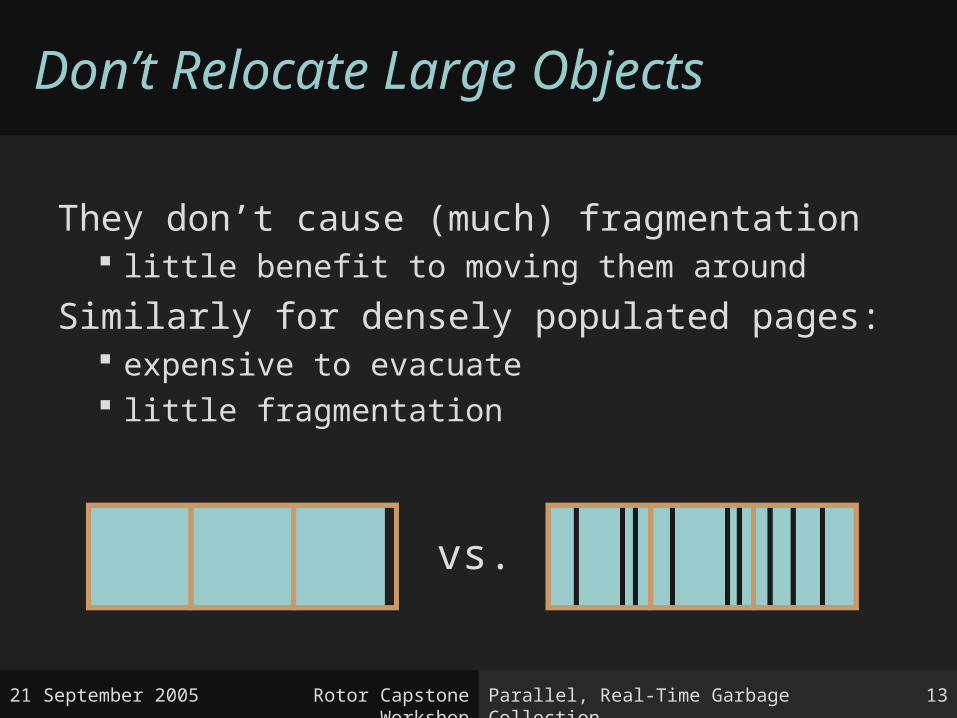
Don’t Relocate Large Objects
They don’t cause (much) fragmentation little benefit to moving them around
Similarly for densely populated pages: expensive to evacuate little fragmentation
vs.

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 14
Page Residency as Guiding Principle
Residency = density of reachable objects avoid evacuating objects from dense pages focus on fragmented parts of the heap
Large objects occupy pages w/ high residency. therefore, they are promoted in place

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 15
Revisiting Allocation
Copying collectors use simple space check constant time when there is sufficient space requires contiguous unused space
In-place promotion requires more sophisticated management of free space. need to find an free gap of
appropriate size

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 16
Overview of Our Hybrid Algorithm
Collection strategy determined for each page
Two data structures for heap traversal: Cheney queues for evacuated objects mark stack for objects promoted in place
Allocation using a modified first-fit favor free pages (treated as large gaps) other free list algorithms also applicable
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 17
Two Mechanisms to Reclaim Space
Reclaim space both. . . via evacuation
• use residency to determine which objects should be evacuated
during allocation• use residency to determine which pages have
enough space to make allocation worthwhile
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 18
Collector Configurations
Two residency parameters: revac = evacuation threshold, maximum
residency at which objects are evacuated ralloc = allocation threshold, maximum
residency at which free space is reused
(both measured as % of page)
Classic algorithms fall out as special cases semi-space: revac = 100%, ralloc = 0%
mark-sweep: revac = 0%, ralloc = 100%
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 19
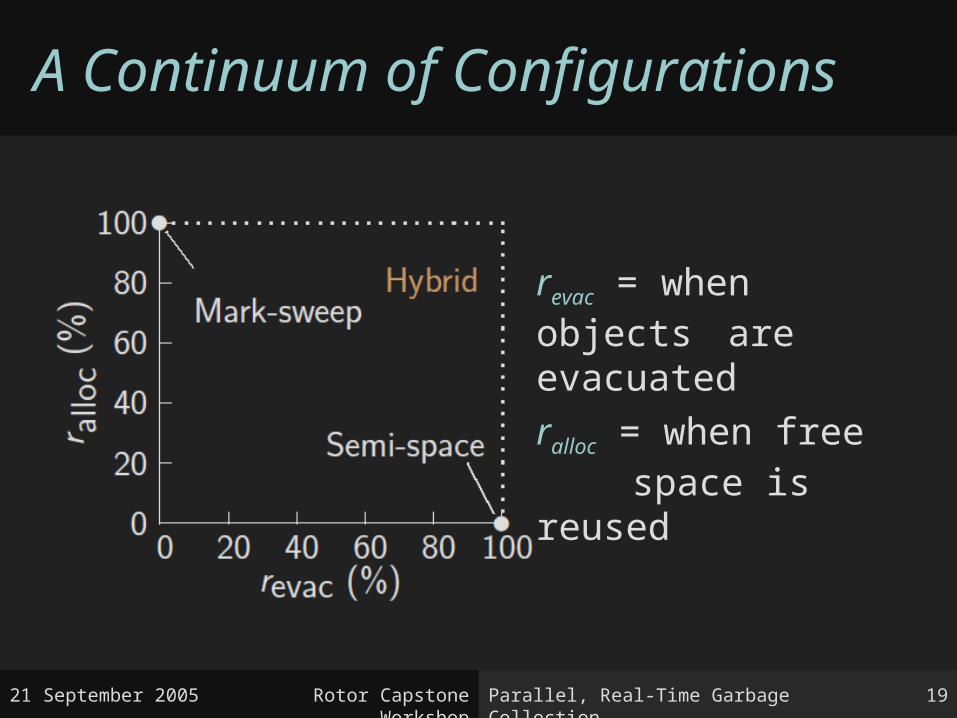
A Continuum of Configurations
revac = when objects are evacuated
ralloc = when free space is reused
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 20
Adaptive Hybrid Collection
So far. . . outlined a hybrid algorithm for garbage
collection shown how residency thresholds give rise to a
continuum of configurations
Next: how to determine residency. . .
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 21
Measuring Residency
Residency can be computed during a heap traversal at little additional cost.
However, we need to know residency at beginning of collection. . .
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 22
Use Past Measurements
One possibility: explicitly measure residency during each collection (using an extra traversal).
Instead, measure and predict future values historical measurements avoid a second pass measured residency still accounts for
changes in program behavior over time

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 23
Existing GCs Also Predict Residency
Other hybrids fix residency estimates in advance. syntactic properties to distinguish objects e.g. size, type, allocation point
Age: “Most objects die young.”
“Nursery is sparsely populated.” i.e. using age to predict residency however, generational collectors are often
inconsistent in using age (e.g. large objects)
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 24
Recovering from Poor Predictions
Adaptive GC recovers naturally from poor predictions. at most two collections to recover space without changes to algorithm

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 25
Recovering from Poor Predictions
Consider the impact of overestimation: many sparse pages remain – high fragmentation measurements give true residency for each page next collection will relocate objects to reclaim space
GC with poor predictions behaves like an explicit measurement phase. in effect, only corrects inaccurate estimates
Allocation uses true residency, not predictions. actual residency is known at the end of collection
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 26
Experimental Results
If we know usage patterns of an application in advance, we choose an appropriate algorithm. adaptive hybrid GC relieves us of this choice
Consider the impact of heap size on GC overhead caveat: other effects of GC not shown here
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 27
Impact of Heap Size
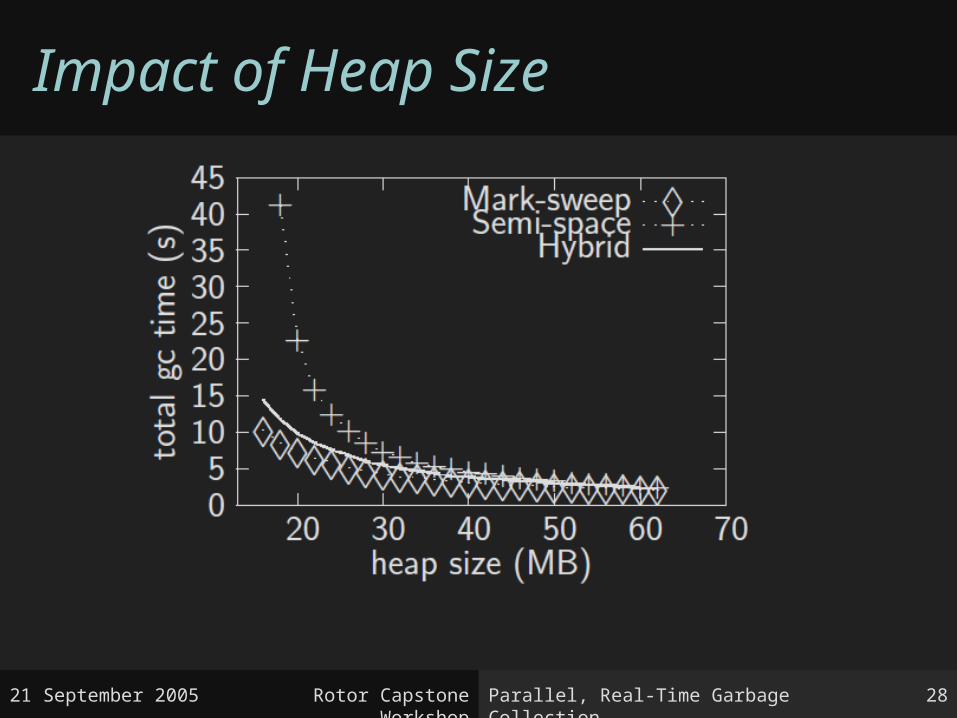
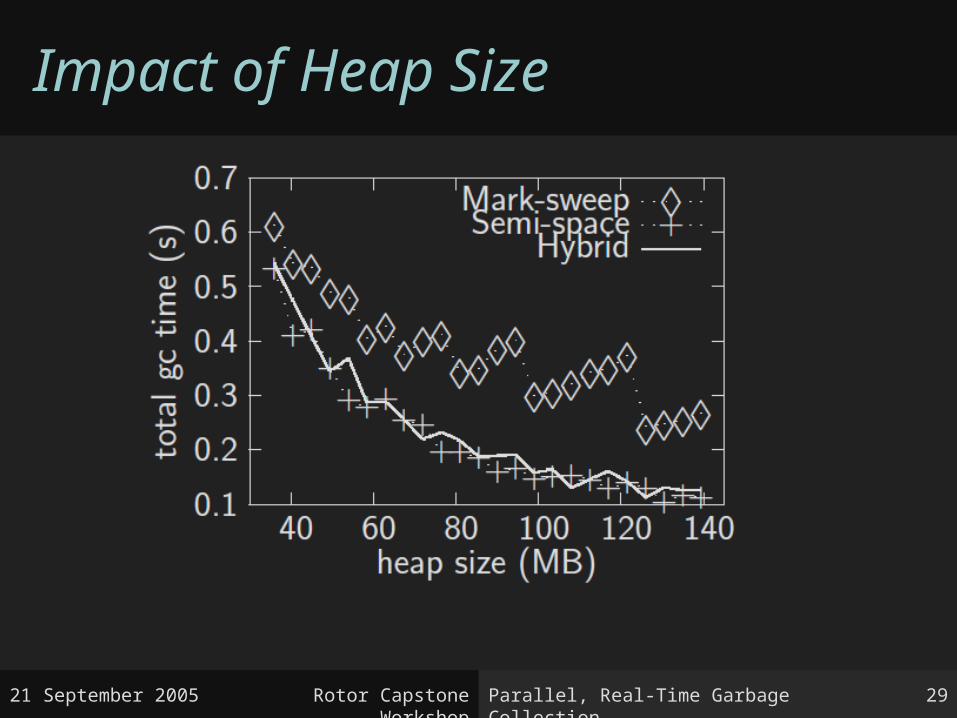
Heap size = memory available to collector
We expect copying collectors to perform well when there is plenty of space.
For small heaps, semi-space collectors may not satisfy all allocation requests.
Hybrid yields good performance in all cases.
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 28
Impact of Heap Size
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 29
Impact of Heap Size
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 30
Other Measurements
Same configuration performs well in many different environments different applications small and large footprints (100 kB to 100 MB)

Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 31
Related Work
Replicating Collection – Nettles & O’Toole; Cheng & Blelloch
Mostly Copying – Bartlett; Smith & Morrisett Garbage First – Detlefs, Flood, Heller, &
Printezis
(also uses residency as a measure of cost) Metronome – Bacon, Cheng, & Rajan
(different point in the “mostly” design space)
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 32
Summary
Incremental collection divide up collector work over time
Adaptive hybrid collection use page residency to guide runtime
decisions continuous spectrum of tracing collectors
Measure and adapt to application behavior predict residency based on past
measurements naturally recovers from poor estimates
Parallel, Real-Time Garbage CollectionRotor Capstone Workshop21 September 2005 33
Useful Links
VEE ’05 paper:http://www.cs.cmu.edu/~spoons/gc/vee05.pdf
Collector implementation:http://www.cs.cmu.edu/~spoons/gc/
C# benchmarks:http://www.cs.cmu.edu/~spoons/gc/benchmarks.html