4 introduction to ai robotics (mit press)chapter 4: the reactive paradigm1 the reactive paradigm...
TRANSCRIPT

Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 1
4 The Reactive Paradigm• Describe the Reactive Paradigm in terms of the 3 robot primitives
and its organization of sensing
• List the characteristics of a reactive robotic system, and discuss the connotations of surrounding the reactive paradigm
• Describe the two dominant methods for combining behaviors in a reactive architecture: subsumption and potential field summation
• Evaluate subsumption and pfield architectures in terms of: support for modularity, niche targetability, ease of portability to other domains, robustness
• Be able to program a behavior using pfields
• Be able to construct a new potential field from primitive pfields and sum pfields to generate an emergent behavior
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 2
4 Review: Lessons from Biology
• Programs should decompose complex actions into behaviors. Complexity emerges from concurrent behaviors acting independently
• Agents should rely on straightforward activation mechanisms such as IRM
• Perception filters sensing and considers only what is relevant to the task (action-oriented perception)
• Behaviors are independent but the output may be used in many ways including: combined with others to produce a resultant output or to inhibit others
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 3
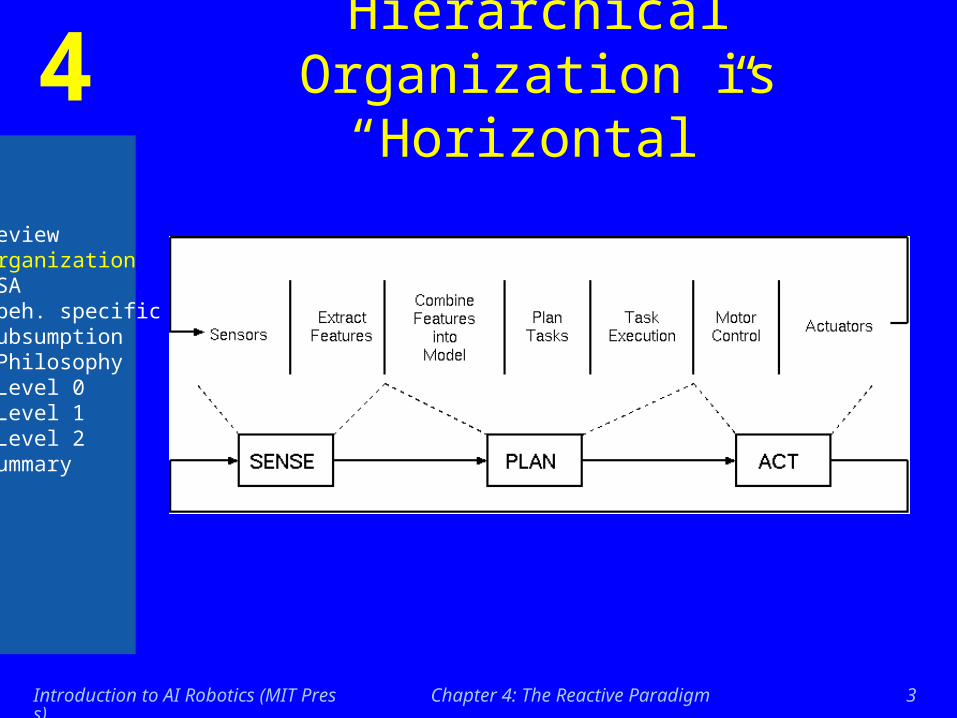
4 Hierarchical Organization is“Horizontal”
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 4
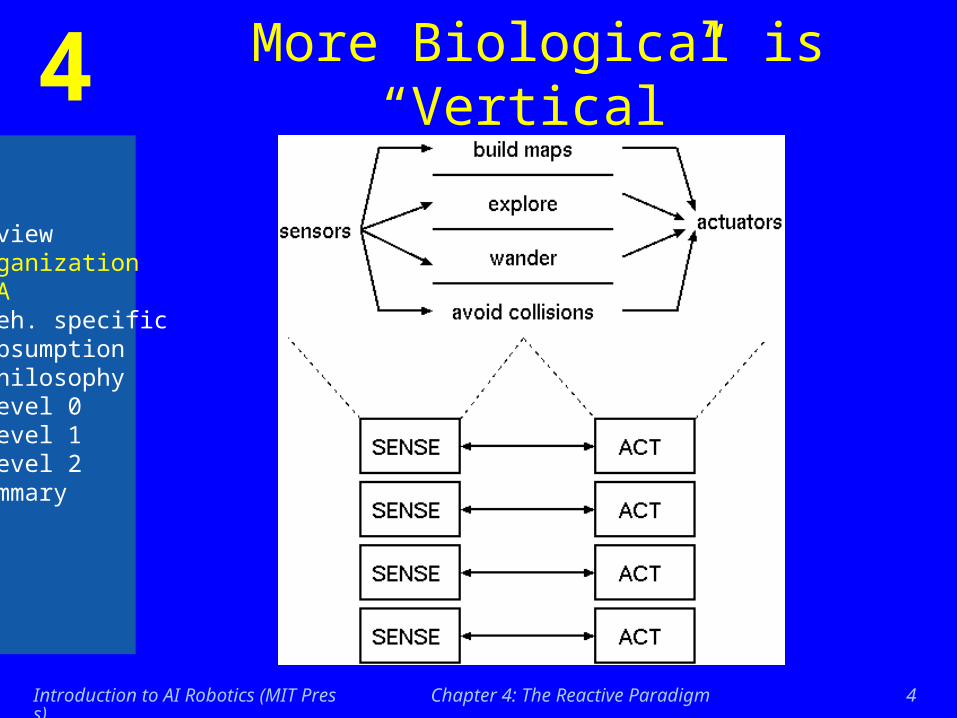
4 More Biological is “Vertical”
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 5
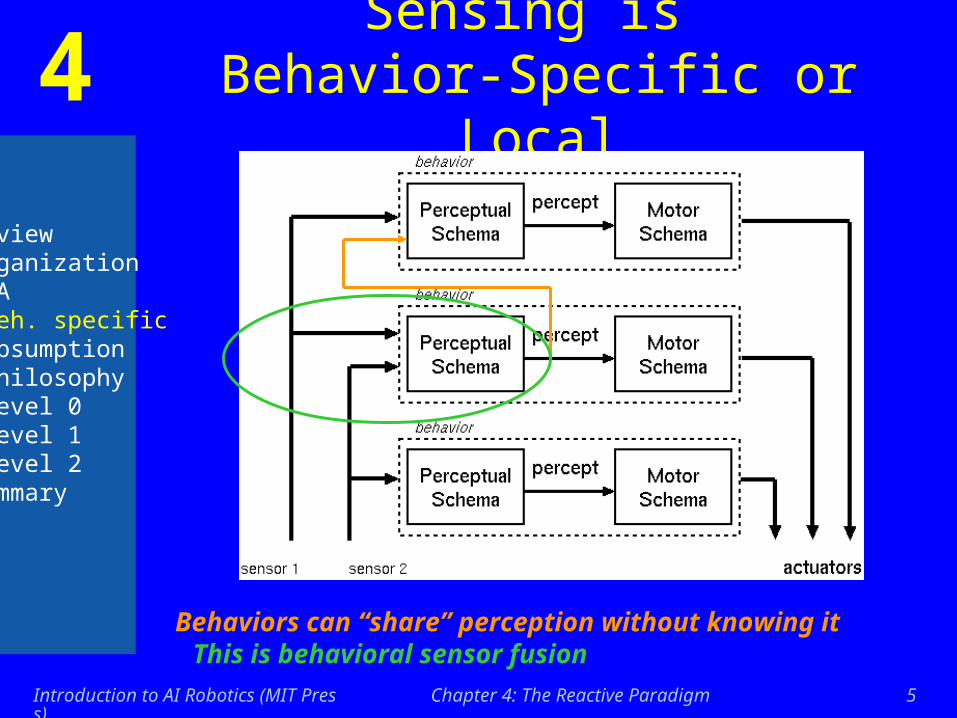
4 Sensing is Behavior-Specific or Local
Behaviors can “share” perception without knowing itThis is behavioral sensor fusion
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 6
4 Subsumption:Rodney Brooks
From http://www.spe.sony.com/classics/fastcheap/index.html
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 7
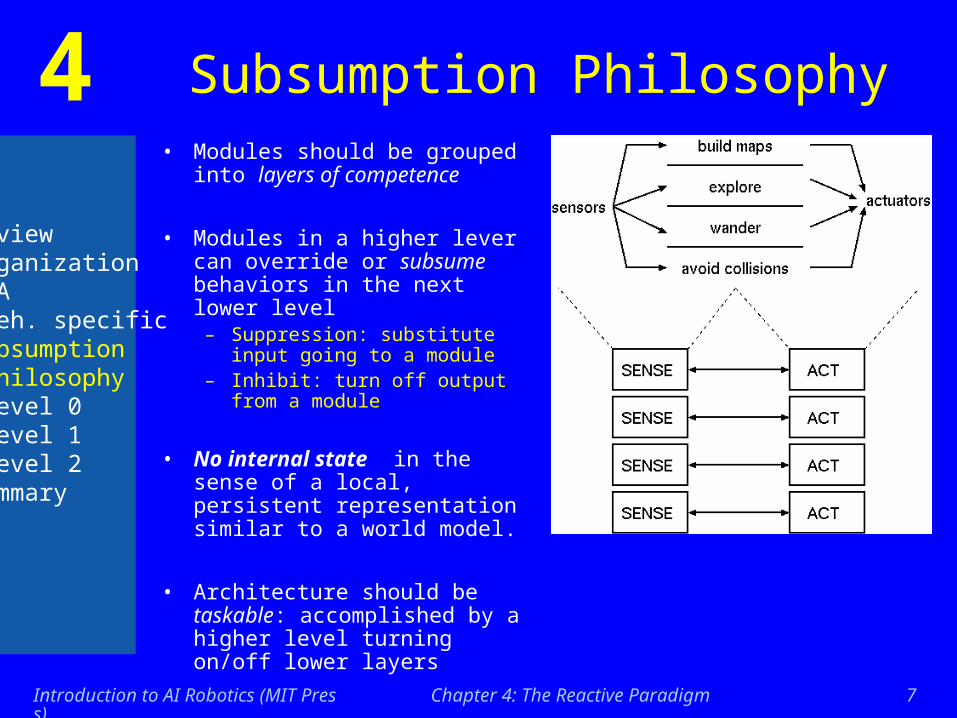
4 Subsumption Philosophy• Modules should be grouped into
layers of competence
• Modules in a higher lever can override or subsume behaviors in the next lower level
– Suppression: substitute input going to a module
– Inhibit: turn off output from a module
• No internal state in the sense of a local, persistent representation similar to a world model.
• Architecture should be taskable: accomplished by a higher level turning on/off lower layers
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 8
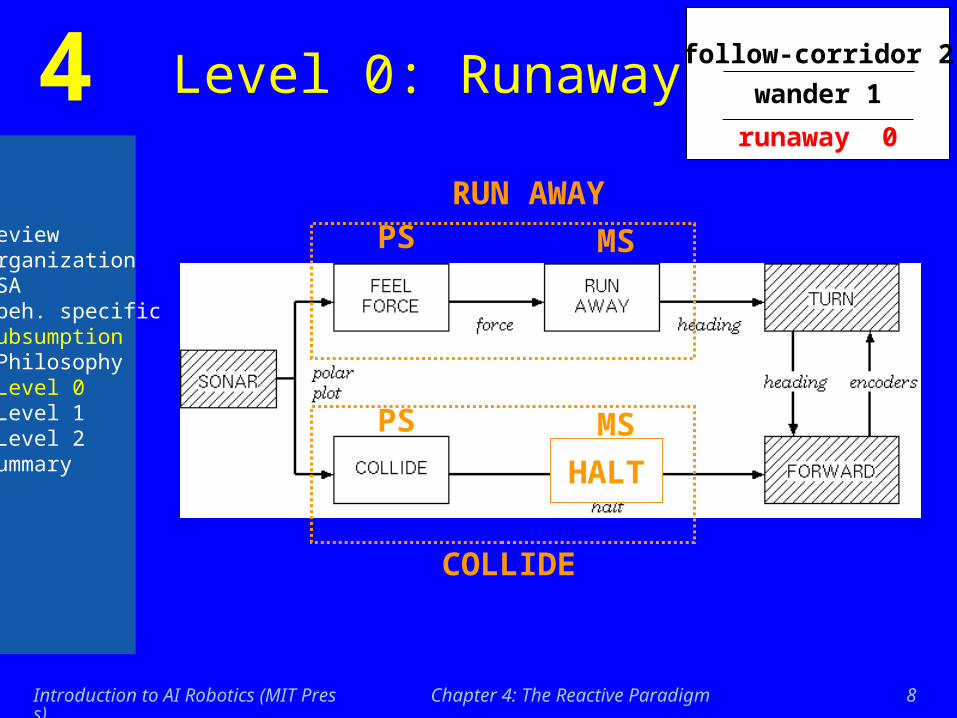
4 Level 0: Runaway
HALT
COLLIDE
PS MS
RUN AWAYPS MS
runaway 0
wander 1 follow-corridor 2
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 9
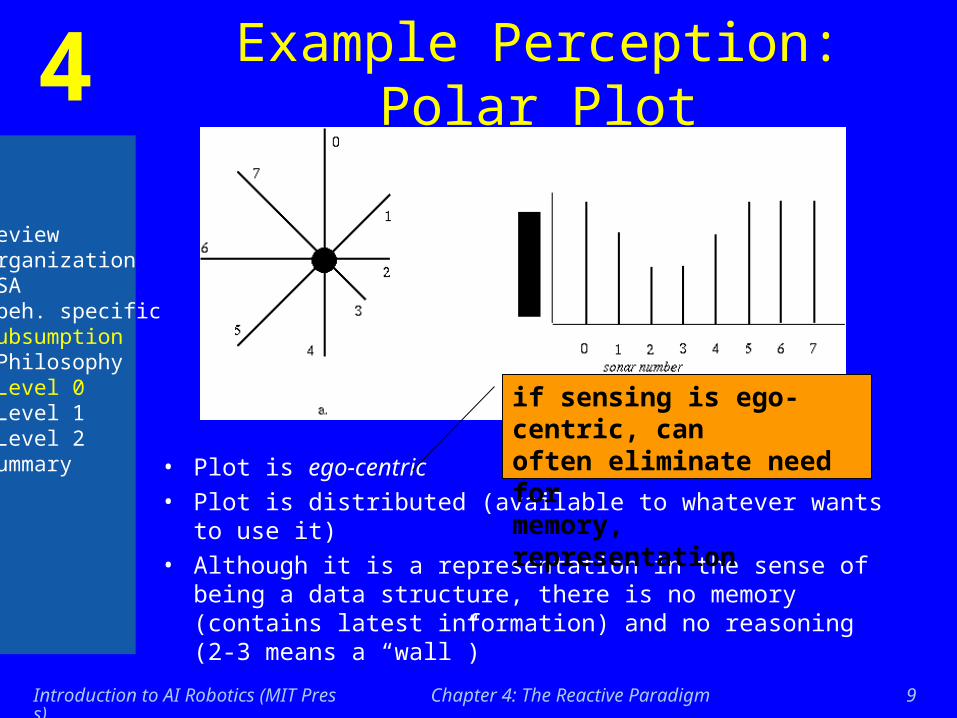
4 Example Perception: Polar Plot
• Plot is ego-centric
• Plot is distributed (available to whatever wants to use it)
• Although it is a representation in the sense of being a data structure, there is no memory (contains latest information) and no reasoning (2-3 means a “wall”)
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
if sensing is ego-centric, canoften eliminate need for memory, representation
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 10
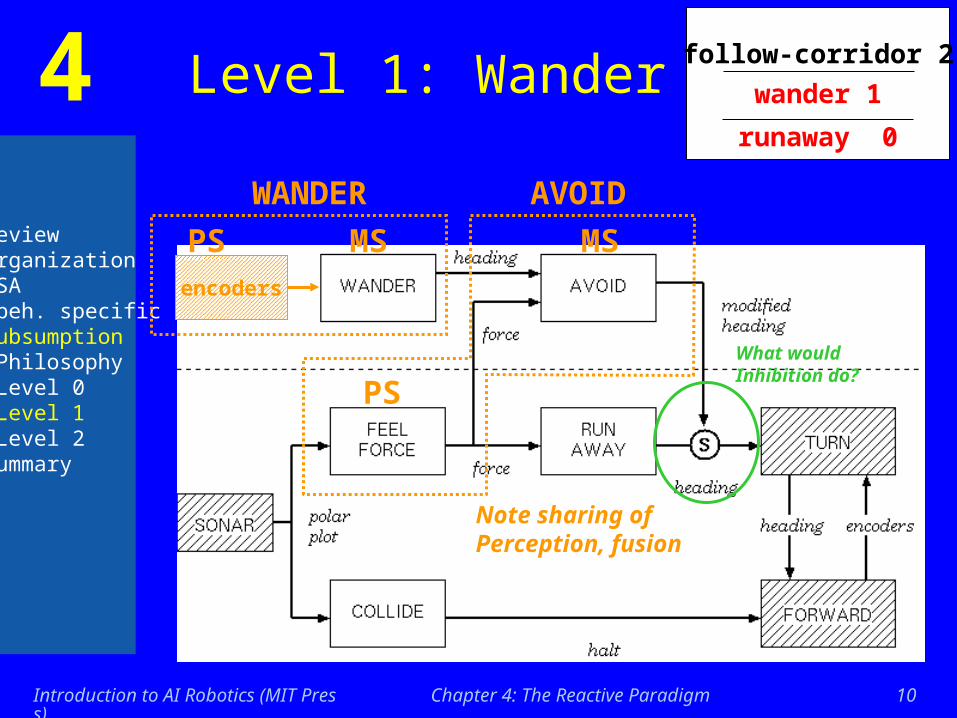
4 Level 1: Wander
runaway 0
wander 1 follow-corridor 2
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
encoders
AVOID
PS
MS
WANDER
PS MS
Note sharing ofPerception, fusion
What wouldInhibition do?
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 11
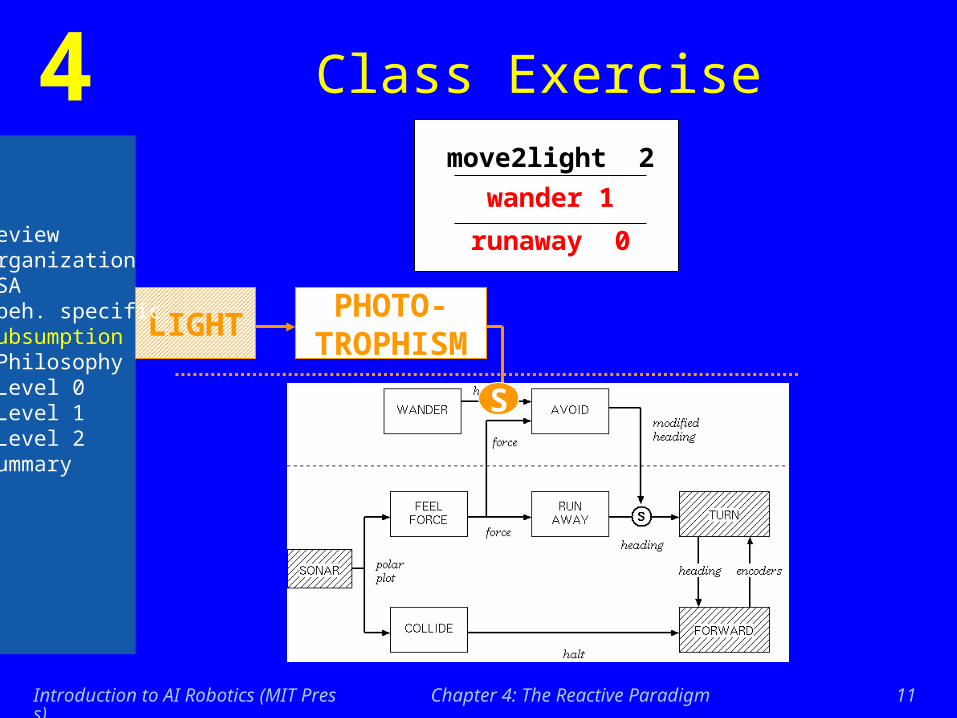
4 Class Exercise
runaway 0
wander 1 move2light 2
LIGHTPHOTO-
TROPHISM
S
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 12
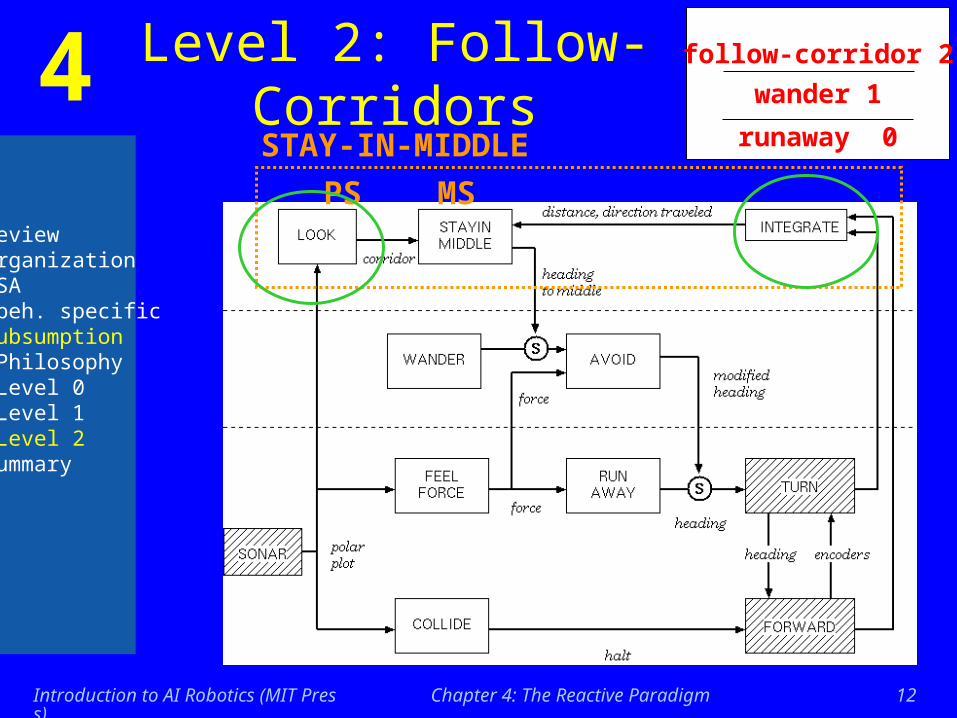
4 Level 2: Follow-Corridors
runaway 0
wander 1 follow-corridor 2
STAY-IN-MIDDLE
PS MSReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 13
4 Subsumption Review
• What is the Reactive Paradigm in terms of primitives?
• What is the Reactive Paradigm in terms of sensing?
• Does the Reactive Paradigm solve the Open World problem?
• How does the Reactive Paradigm eliminate the frame problem?
• What is the difference between a behavior and a level of competence?
• What is the difference between suppression and inhibition in subsumption?
ReviewOrganization-SA-beh. specificSubsumption-Philosophy-Level 0-Level 1-Level 2Summary
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 14
4 Potential Fields:Ron Arkin
From http://www.cc.gatech.edu/aimosaic/faculty/arkin
From http://www.cc.gatech.edu/aimosaic/robot-lab/MRLhome.html
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 15
4 Potential Fields Philosophy• The motor schema component of a behavior can be
expressed with a potential fields methodology– A potential field can be a “primitive” or constructed from
primitives which are summed together– The output of behaviors are combined using vector summation
• From each behavior, the robot “feels” a vector or force– Magnitude = force, strength of stimulus, or velocity– Direction
• But we visualize the “force” as a field, where every point in space represents the vector that it would feel if it were at that point
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 16
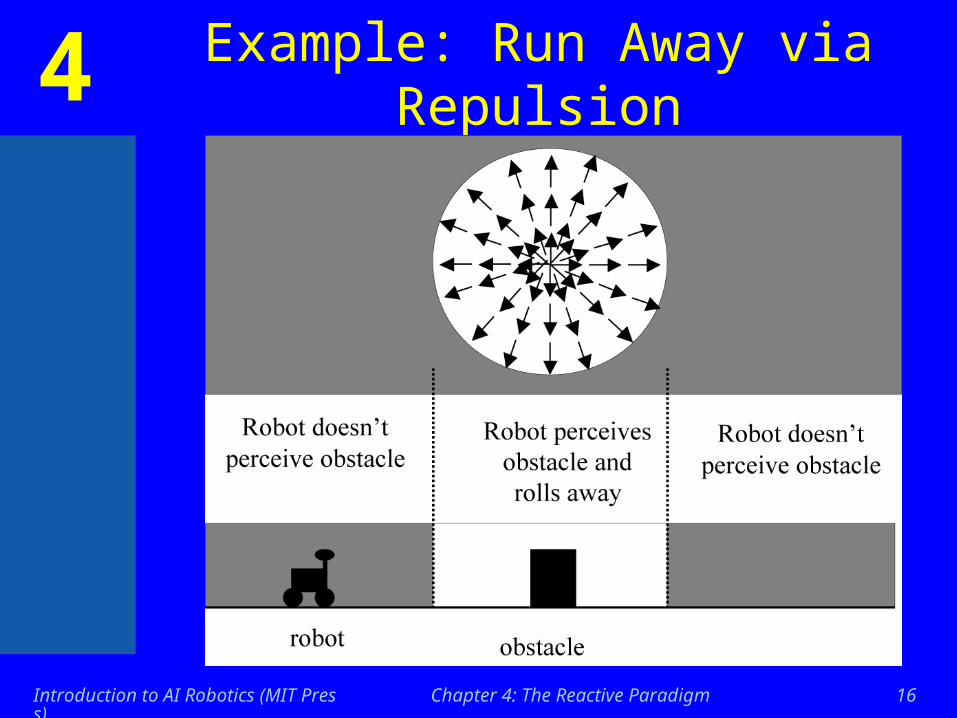
4 Example: Run Away via Repulsion
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 17
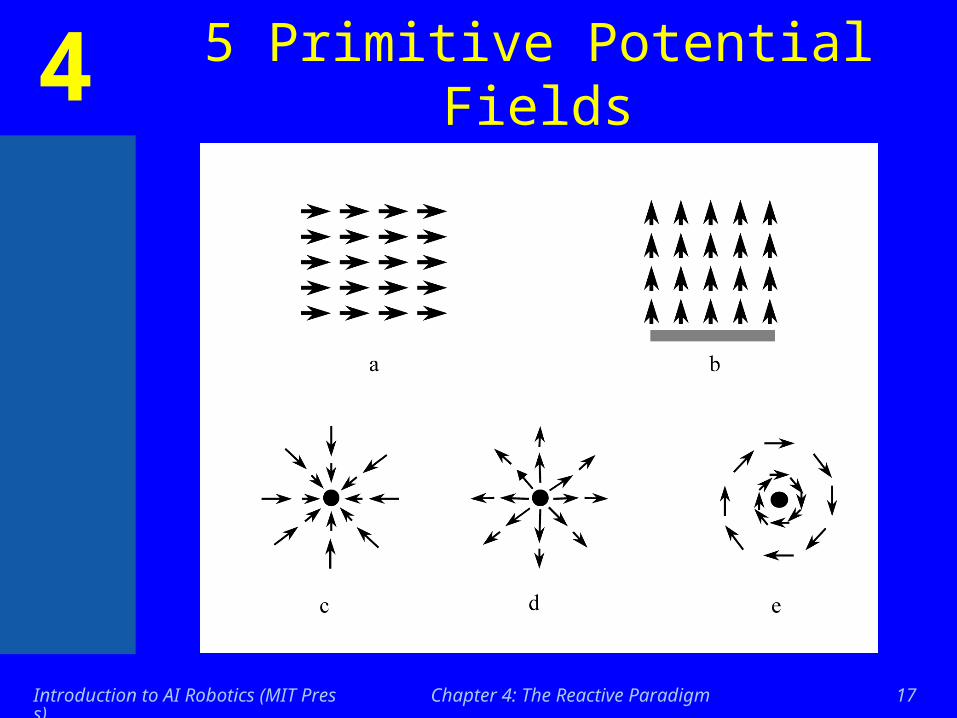
4 5 Primitive Potential Fields
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 18
4 Common fields in behaviors
• Uniform– Move in a particular direction, corridor following
• Repulsion– Runaway (obstacle avoidance)
• Attraction– Move to goal
• Perpendicular– Corridor following
• Tangential– Move through door, docking (in combination with other fields)
• random– do you think this is a potential field? what would it look like?
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 19
4 Class Exercise
• Name the field you’d use for – Moving towards a light
– Avoiding obstacles
Attractive
Repulsive
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 20
4 Magnitude profiles
• Constant magnitude• linear drop off• exponential drop off
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 21
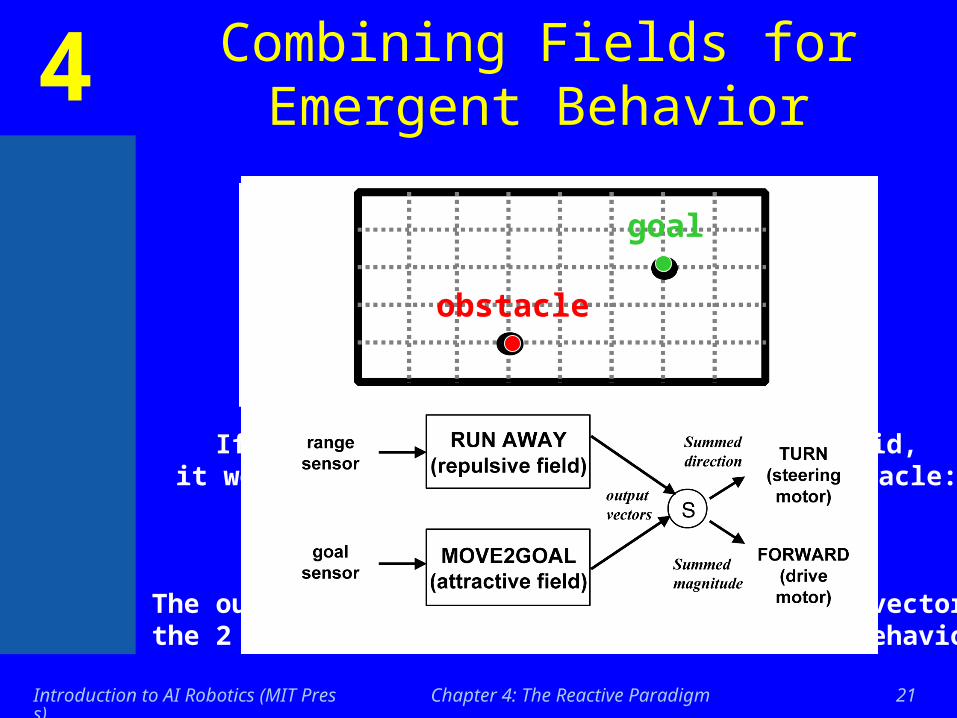
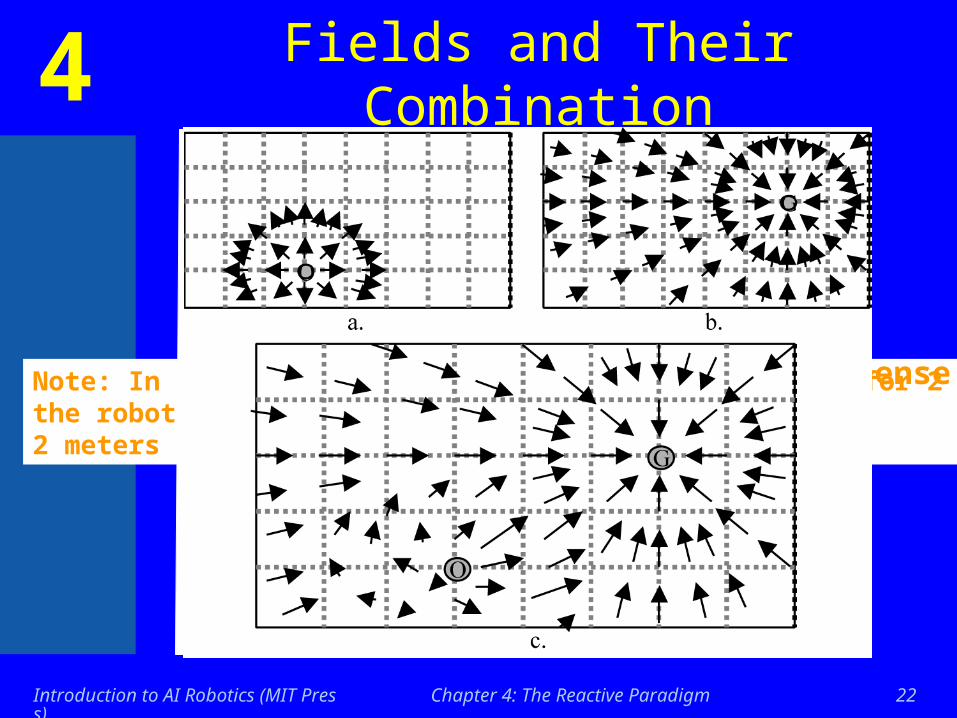
4 Combining Fields forEmergent Behavior
obstacleobstacle
goal
If robot were dropped anywhere on this grid,it would want to move to goal and avoid obstacle:
Behavior 1: MOVE2GOALBehavior 2: RUNAWAY
The output of each independent behavior is a vector,the 2 vectors is summed to produce emergent behavior
obstacle
goal
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 22
4
Note: In this example, repulsive field only extends for 2 meters;the robot runs away only if obstacle within2 meters
Note: in this example, robot can sense thegoal from 10 meters away
Fields and Their Combination
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 23
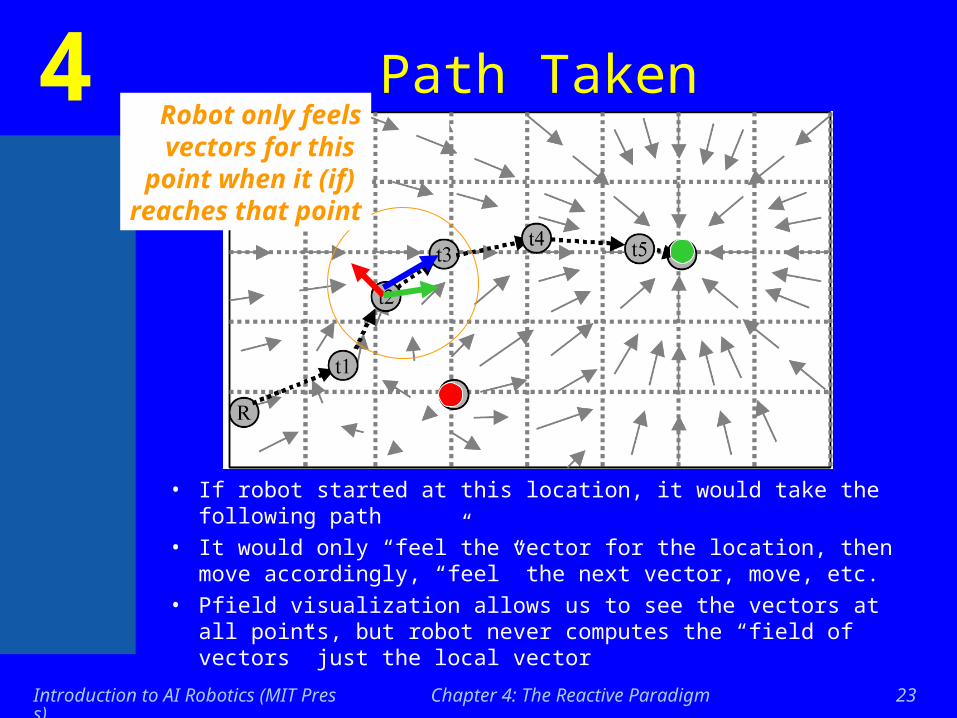
4 Path Taken
• If robot started at this location, it would take the following path
• It would only “feel”the vector for the location, then move accordingly, “feel” the next vector, move, etc.
• Pfield visualization allows us to see the vectors at all points, but robot never computes the “field of vectors” just the local vector
Robot only feels vectors for this
point when it (if) reaches that point

Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 24
4 Example: follow-corridor or follow-sidewalk
Perpendicular Uniform
Combined
Note use of Magnitude profiles:Perpendicular decreases
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 25
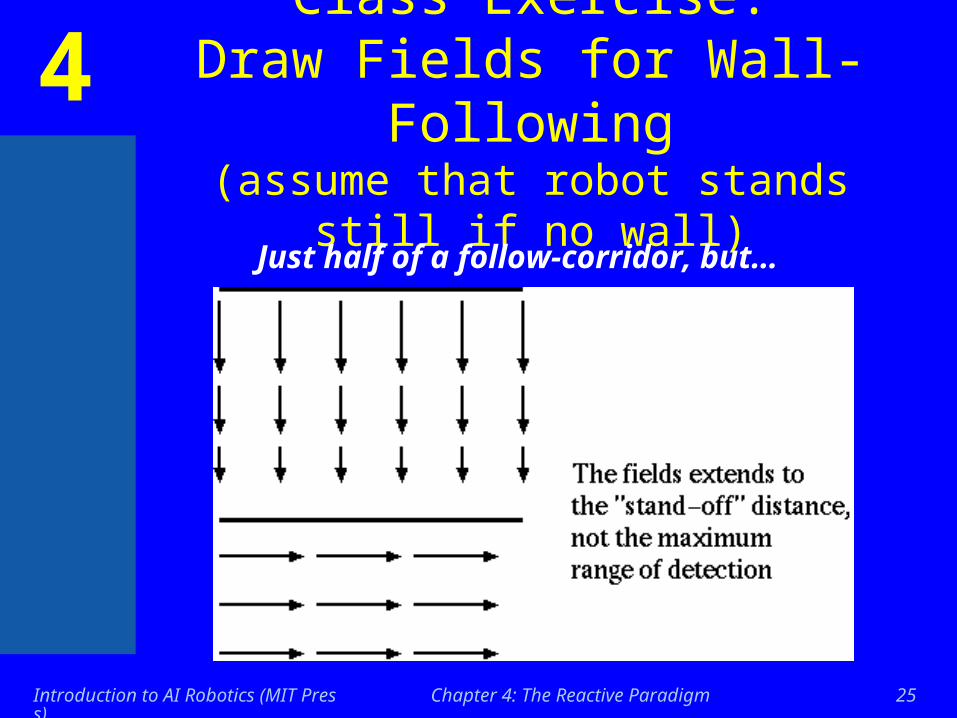
4 Class Exercise:Draw Fields for Wall-Following(assume that robot stands still if no wall)
Just half of a follow-corridor, but…
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 26
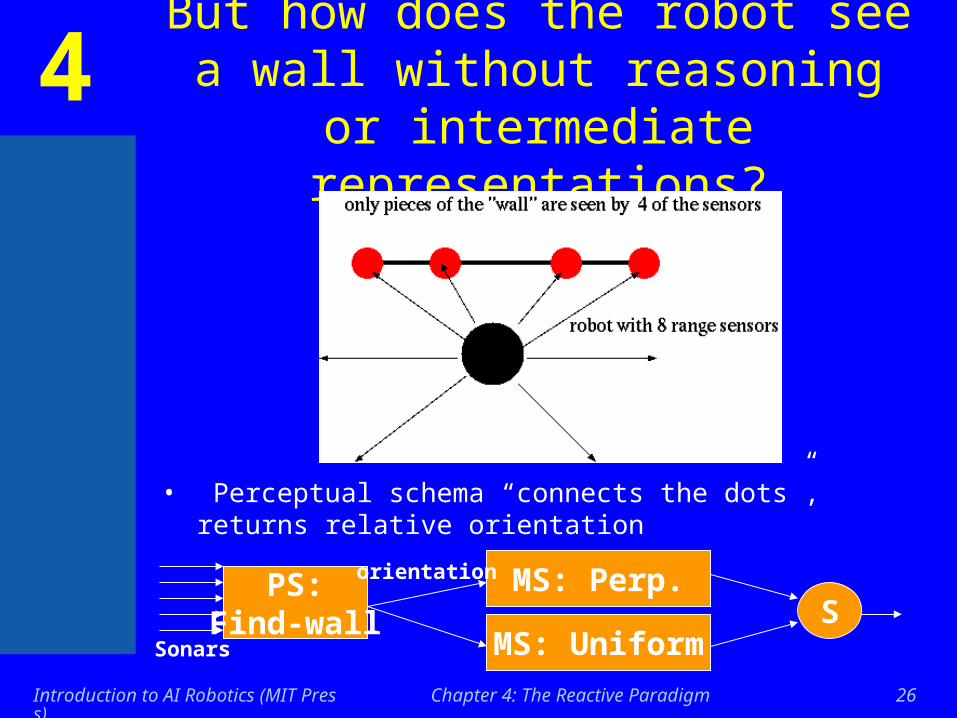
4 But how does the robot see a wall without reasoning or intermediate
representations?
• Perceptual schema “connects the dots”, returns relative orientation
PS:Find-wall
MS: Perp.
MS: UniformS
Sonars
orientation
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 27
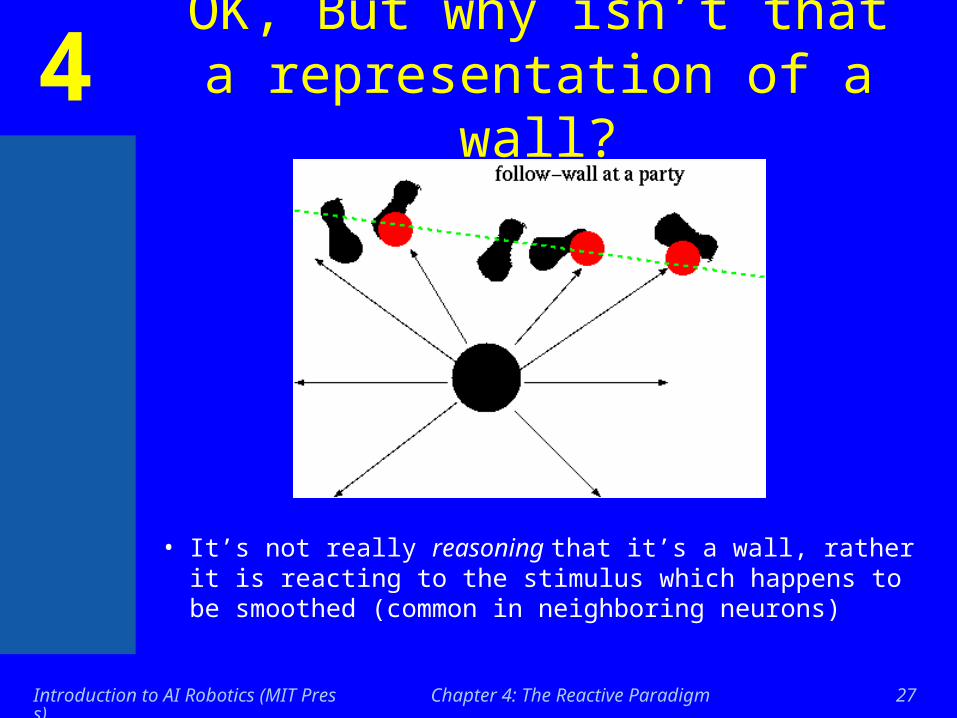
4 OK, But why isn’t that a representation of a wall?
• It’s not really reasoning that it’s a wall, rather it is reacting to the stimulus which happens to be smoothed (common in neighboring neurons)
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 28
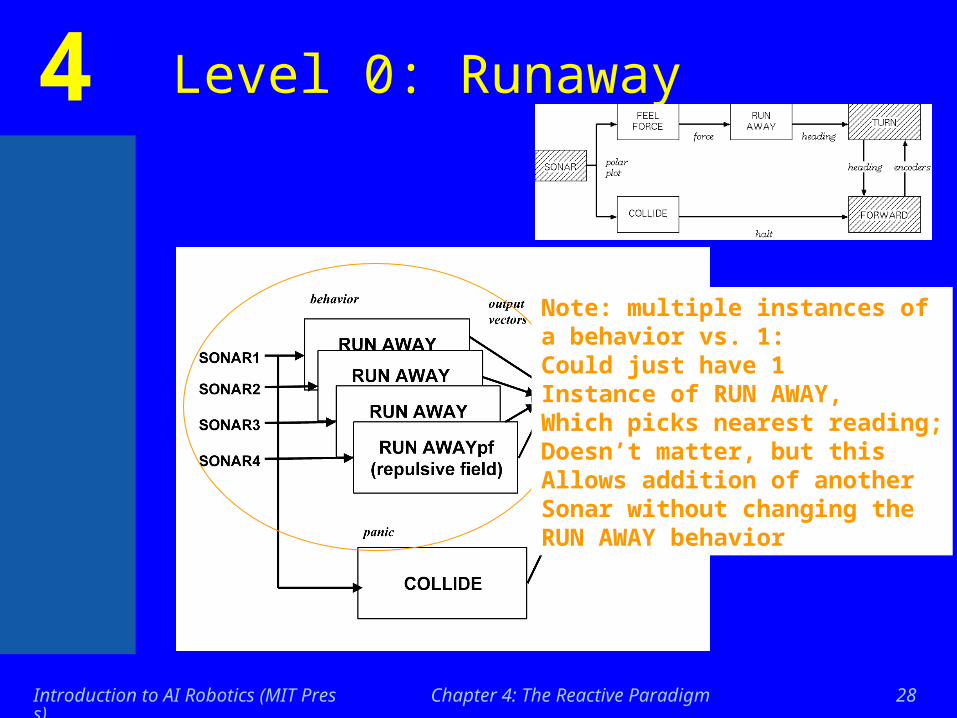
4 Level 0: Runaway
Note: multiple instances ofa behavior vs. 1:Could just have 1 Instance of RUN AWAY,Which picks nearest reading;Doesn’t matter, but thisAllows addition of anotherSonar without changing theRUN AWAY behavior
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 29
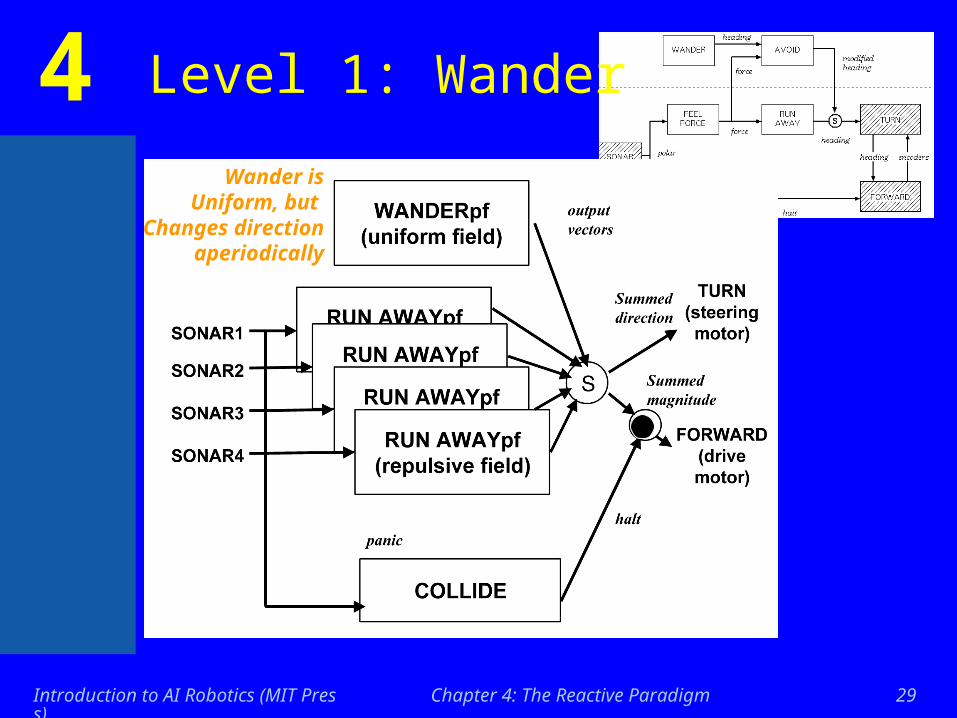
4 Level 1: Wander
Wander isUniform, but
Changes directionaperiodically
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 30
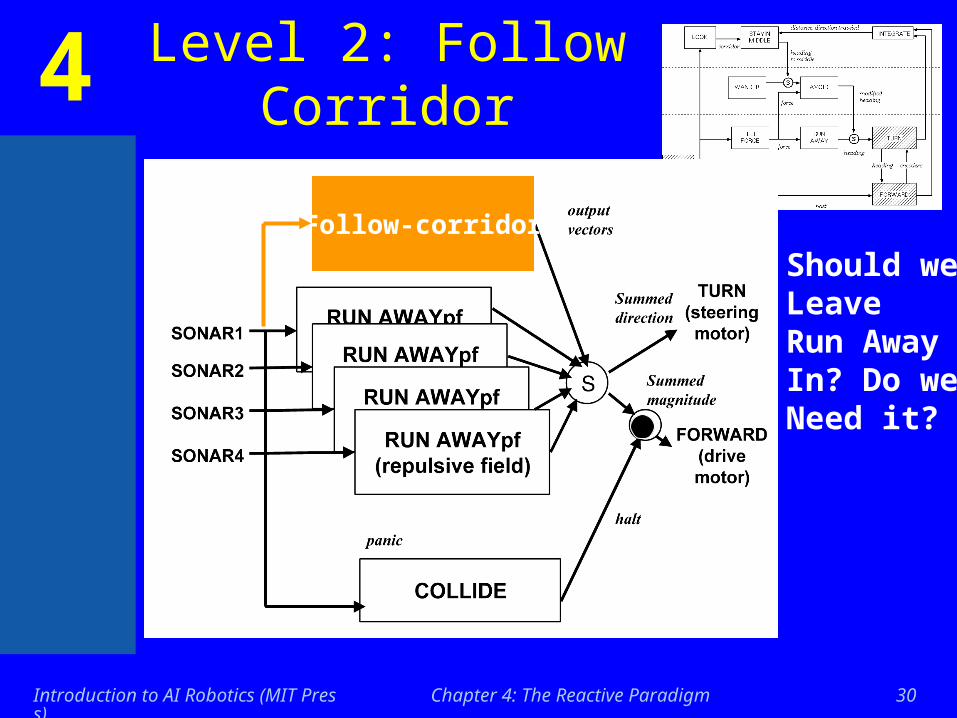
4 Level 2: Follow Corridor
Follow-corridor
Should weLeaveRun AwayIn? Do weNeed it?
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 31
4 Pfields
• Advantages– Easy to visualize
– Easy to build up software libraries
– Fields can be parameterized
– Combination mechanism is fixed, tweaked with gains
• Disadvantages– Local minima problem (sum to magnitude=0)
• Box canyon problem
– Jerky motion
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 32
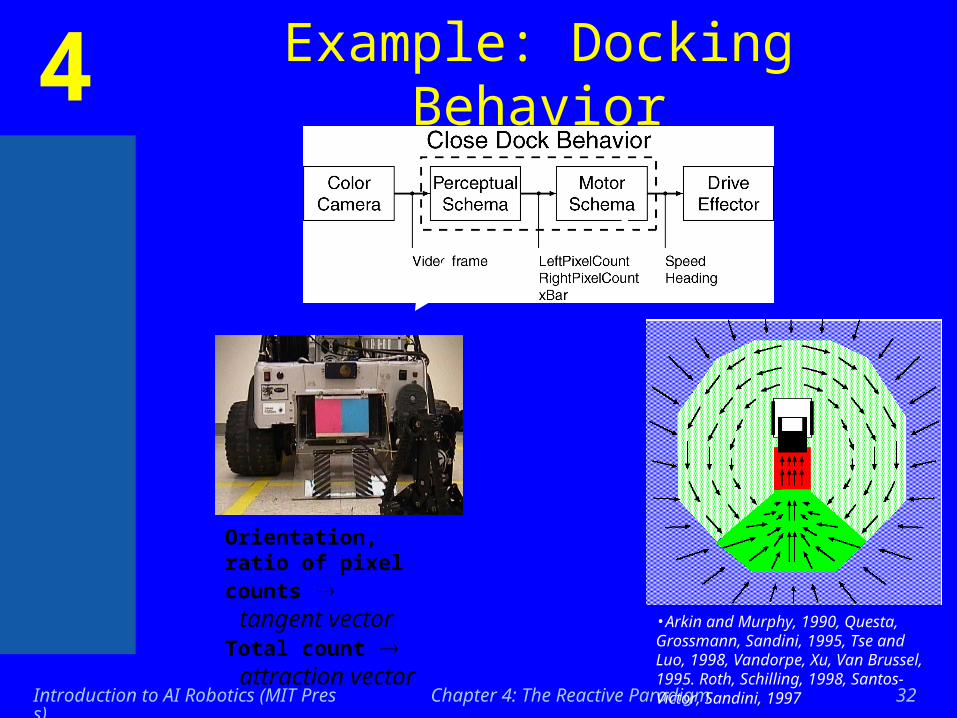
4 Example: Docking Behavior
•Arkin and Murphy, 1990, Questa, Grossmann, Sandini, 1995, Tse and Luo, 1998, Vandorpe, Xu, Van Brussel, 1995. Roth, Schilling, 1998, Santos-Victor, Sandini, 1997
Orientation, ratio of pixel counts tangent vectorTotal count attraction vector
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 33
4 Docking Behavior Video
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 34
4 Comparison of Architectures
• Similar in philosophy and results; essentially equivalent
• Support for modularity– Both decompose task into behaviors
– Subsumption favors hardware, pfields pure software• could do with just rules but lose modularity, design discipline
• Niche targetability – High; philosophy is to fit an ecological niche!
• Ease of portability to other domains– Only to ones that can be done with reflexive behaviors
– Subsumption not as easy with upper levels
• Robustness– Subsumption has implicit graceful degradation
Introduction to AI Robotics (MIT Press) Chapter 4: The Reactive Paradigm 35
4 Pfields Summary• Reactive Paradigm: SA, sensing is local
– Solves the Open World problem by emulating biology
– Eliminates the frame problem by not using any global or persistent representation
– Perception is direct, ego-centric, and distributed
• Two architectural styles are: subsumption and pfields
• Behaviors in pfield methodologies are a tight coupling of sensing to acting; modules are mapped to schemas conceptually
• Potential fields and subsumption are logically equivalent but different implementations
• Pfield problems include– local minima (ways around this)
– jerky motion
– bit of an art