5 feedback control pid - upm
TRANSCRIPT
1
Control de Procesos Industriales
1
Linear Control
5. Basic Regulatory Control by
Pascual Campoy Universidad Politécnica Madrid
2
Basic Regulatory Control
• Feedback control structure • Basic control actions • PID controllers • Close loop behaviour • Controller tuning for 1st order systems • Controller tuning for higher order systems

2
Linear Control U.P.M.-C.V.G. P. Campoy
Feedback control structure
3
¿how to evaluate u(t) depending on ε(t)?
system y(t) r(t)
- +
sensor
Control law ε(t)
ym(t)
u(t)
4
Basic Regulatory Control
• Feedback control structure • Basic control actions • PID controllers • Close loop behaviour • Controller tuning for 1st order systems • Controller tuning for higher order systems

3
Linear Control U.P.M.-C.V.G. P. Campoy 5
Basic control actions: proportional action
Kc= 1, 2, 4, 8, 16, 32
Linear Control U.P.M.-C.V.G. P. Campoy 6
Basic control actions: proportional-derivative action
Td= 0, 0.1, 0.2, 0.4, 0.8, 1.6
Kc= 16

4
Linear Control U.P.M.-C.V.G. P. Campoy 7
Basic control actions: proportional-integral action
1/Ti= 0, 0.1, 0.2, 0.4, 0.8
Kc= 16
Linear Control U.P.M.-C.V.G. P. Campoy 8
Basic control actions: proportional-integral-derivative
P, Gc(s) = 16 PD, Gc(s) = 16 (1+0.4s) PI, Gc(s) = 16 (1+0.4/s) PID, Gc(s) = 16 (1+0.4s+0.4/s)

5
9
Basic Regulatory Control
• Feedback control structure • Basic control actions • PID controllers • Close loop behaviour • Controller tuning for 1st order systems • Controller tuning for higher order systems
Linear Control U.P.M.-C.V.G. P. Campoy
10
Parallel PID controller
system Y(s) R(s)
- +
sensor
Tds
ε(s)
Ym(s)
U(s) 1/Tis Kc

6
Linear Control U.P.M.-C.V.G. P. Campoy
11
Serial PID controller
system Y(s) R(s)
- +
sensor
ε(s)
Ym(s)
U(s) 1/T´is
K´c
U(s) = K´c (1+1/T´is) (1+T´ds) ε(s)
T´ds
Linear Control U.P.M.-C.V.G. P. Campoy
Serial vs. Parallel controllers
12
• Serial controller ( ): – Also known as “classical controller”, easier for analogue
implementation (e.g. pneumatic, electrical, ) • Parallel controller ( ) :
– Also known as “non interlaced controller”, each parameter is associated to one control action
• serial version only when Ti≥4Td parallel version is more general and allows complex ceros
• same values when Td/Ti→0 Parameter relationships:

7
13
Feasible PID controllers
• Ideal PID controller: parallel:
where γ is a fixed parameter for each controller, whose value is isually in the range 0.05 y 0.1
• Feasible PID controller : parallel: serial:
serial:
14
Basic Regulatory Control
• Feedback control structure • Basic control actions • PID controllers • Close loop behaviour • Controller tuning for 1st order systems • Controller tuning for higher order systems

8
Linear Control U.P.M.-C.V.G. P. Campoy
15
Feedback transfer function
Dynamic:
Estatic when estable:
Y(s) Yref(s) -
+ ε(s) U(s) Gp(s) Gc(s)
Linear Control U.P.M.-C.V.G. P. Campoy
16
Performance evaluation
Y(s) Yref(s) -
+ ε(s) U(s) Gp(s) Gc(s)

9
17
Basic Regulatory Control
• Feedback control structure • Basic control actions • PID controllers • Close loop behaviour • Controller tuning for 1st order systems • Controller tuning for higher order systems
Linear Control U.P.M.-C.V.G. P. Campoy
18
PI tuning in 1st. order systems
Y(s) Yref(s)
- + ε(s) U(s)
Kp (tps+1)
Kc(Tis+1) Tis
when:

10
19
Basic Regulatory Control
• Feedback control structure • Basic control actions • PID controllers • Close loop behaviour • Controller tuning for 1st order systems • Controller tuning for higher order systems
20
PID empirical tuning: Ziegler Nichols based in open loop behaviour
• Open loop step response:
Controller Kc
Gain
Ti Integral
time
Td Derivative
time
P 1Kp
tctd
PI 0,9Kp
tctd
3,33 td
PID 1,2Kp
tctd
2 td 0,5 td
System ue(t) y(t)
tc td
Kp
tc td
tc td Kp
tc td Kp
application range:

11
Linear Control U.P.M.-C.V.G. P. Campoy
PID empirical tuning: Ziegler-Nichols based in close loop behaviour
21
Controller Kc
Gain
Ti Integral
time
Td Derivative
time
P 0,5 Ku PI 0,45 Ku 0,83 Tu
PID 0,6 Ku 0,5 Tu 0,125 Tu Tu
system KC y(t) yr(t)
- +
Linear Control U.P.M.-C.V.G. P. Campoy
Z-N parameters for which tipe of controller ?
22
1. Only PID controllers are different 2. It is not clear which controller Z-N used in
their original work 3. The parallel version (with or without filter) is
used in most of the cases. 4. Results are similar, slightly better when
applied to parallel controllers (calculating the parallel version in case they were the serial parameters, we obtain Kc=1.25K’c, Ti=1.25T’i, Td=0.8T’d, that implies a more generic and overshooting response)

12
23
Example 5.1 …
• Zigler-Nichols open loop tuning:
td=0.5 tc=2.1
KP=0.166 Kc=30 ti=1 td=0.25
tc td
Kp y(t)
ue(t) y(t) 1 (s+1)(s+2)(s+3)
Linear Control U.P.M.-C.V.G. P. Campoy
… example 5.1 …
24
y(t)
Tu=2
Ku=60
Ku=60 Tu=2
Kc=36 ti=1 td=0.25
KC r(t)
-+ 1
(s+1)(s+2)(s+3)
• Zigler-Nichols close loop tuning:

13
25
… example 5.1
• Results for both controllers:
Kc=30, ti=1, td=0.25
Kc=36, ti=1, td=0.25
Linear Control U.P.M.-C.V.G. P. Campoy
Example 5.2 …
26
td=0.25 tc=1
KP=1 Kc=4.8 ti=0.5 td=0.125
tc td
ue(t) y(t) e-0.25s 1+s
• Zigler-Nichols open loop tuning:

14
Linear Control U.P.M.-C.V.G. P. Campoy
… example 5.2 …
27
Tu=1
Ku=7.2
Ku=7.2 Tu=1
Kc=4.32 ti=0.5 td=0.125
e-0.25s 1+s KC
y(t) r(t) -
+
• Zigler-Nichols close loop tuning:
28
… example 5.2
• Results for both controllers:
Kc=4.8, ti=0.5, td=0.125
Kc=4.32, ti=0.5, td=0.125
15
Linear Control U.P.M.-C.V.G. P. Campoy
29
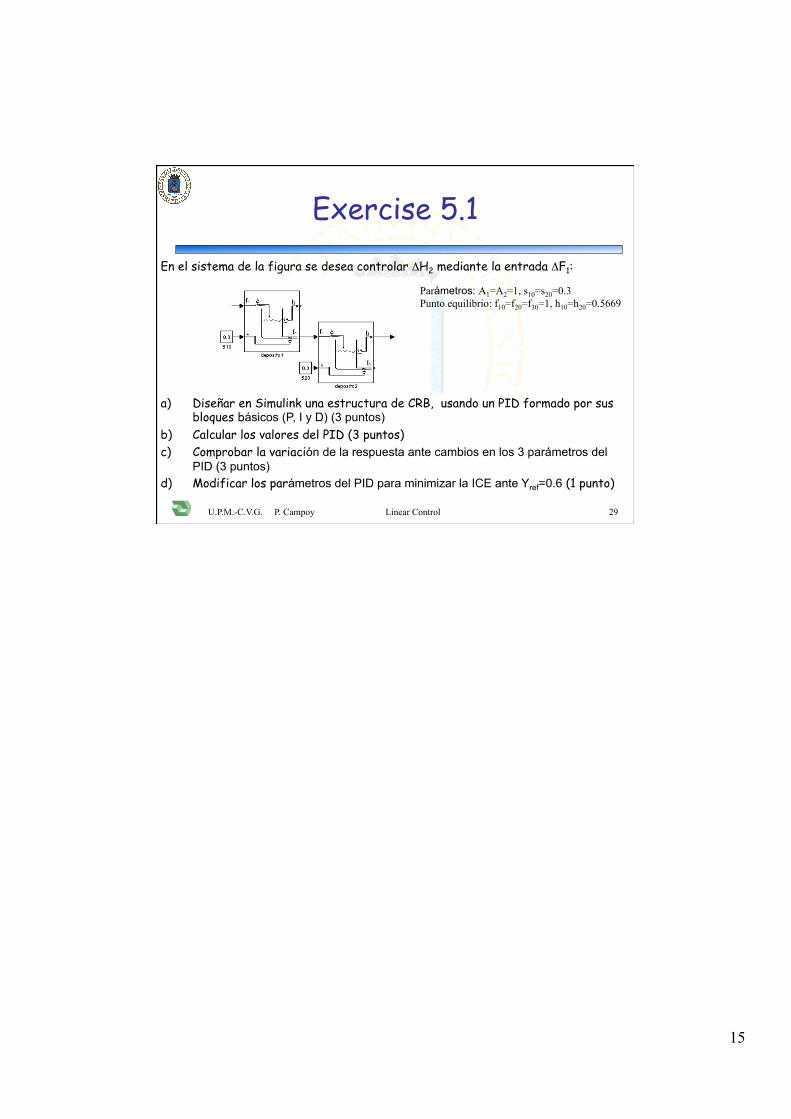
Exercise 5.1
En el sistema de la figura se desea controlar ΔH2 mediante la entrada ΔF1:
Parámetros: A1=A2=1, s10=s20=0.3 Punto equilibrio: f10=f20=f30=1, h10=h20=0.5669
a) Diseñar en Simulink una estructura de CRB, usando un PID formado por sus bloques básicos (P, I y D) (3 puntos)
b) Calcular los valores del PID (3 puntos) c) Comprobar la variación de la respuesta ante cambios en los 3 parámetros del
PID (3 puntos) d) Modificar los parámetros del PID para minimizar la ICE ante Yref=0.6 (1 punto)