5 reti a tempo discreto a - diee.unica.itmusai/cirdig/5_reti a tempo discreto_a.pdf · diagramma di...
TRANSCRIPT

M. Usai Circuiti digitali 5_a 1
Reti a tempo discreto a5.0 IntroduzionePer realizzare un filtro discreto nel tempo sia• con la simulazione utilizzando software di computer, • che fisicamente con una hardware (programmable DSP “Digital
Signal Processor” chip, or custom VLSI “Very Large Scale Integration”), deve essere definita una rete descrivendo la procedura di calcolo per realizzarla.
• Per l’implementazione software, la rete corrisponde a un diagramma di flusso ( flowchart ) dell'algoritmo del filtro;
• mentre per le realizzazioni hardware, la rete descrive gli elementi del circuito effettivo e le loro interconnessioni.
M. Usai Circuiti digitali 5_a 2
La definizione della rete comporta i seguenti vantaggi:
• attraverso i coefficienti di certe strutture di rete possono essere messe in evidenza molte importanti proprietà del filtro discreto nel tempo, indirizzando verso le modifiche progettuali che consentono di effettuare interventi mirati per ottenere gli output desiderati ;
• inoltre possono essere ottenuti significativi risparmi computazionali scegliendo una rete appropriata;
La prestazione della implementazione digitale èsostanzialmente molto legata alla scelta della struttura di rete a causa degli effetti della quantizzazione.

M. Usai Circuiti digitali 5_a 3
5.1 Proprietà del grafico di flusso (Flow Graph)
Almeno una implementazione, la più ovvia, del filtro discreto nel tempo è deducibile dalla struttura della sua funzione di trasferimento H(z), e molte altre possono essere generate facilmente ( processo di sintesi).
Viceversa la funzione di trasferimento H(z) è facilmente deducibile, in molti casi, dal diagramma a blocchi della implementazione del filtro ( processo di analisi).

M. Usai Circuiti digitali 5_a 4
Le semplici procedure di sintesi e di analisi descritte di seguito sono basate sulle seguenti proprietà dei diagrammi di flusso, per cui si definiscono:
Reti parallele: quando due filtri o elementi di filtro con risposte impulsive h1(n) e h2(n) sono disposti in parallelo,la risposta impulsiva h(n) della combinazione dei due filtri èuguale a:
h(n)= h1(n) + h2(n),
quindi la funzione di trasferimento della rete in parallelo è data da:
H1(z)+H2(z) (5.1.1)
M. Usai Circuiti digitali 5_a 5
Reti in cascata: quando due filtri o elementi di filtro sono disposti in cascata,la risposta impulsiva h(n) della combinazione dei due filtri :
h(n) = h(n)1*h2(n)
e quindi la funzione di trasferimento della rete in cascata èsemplicemente:
H(z)=H1(z)H2(z) (5.1.2)

M. Usai Circuiti digitali 5_a 6
Reti in controreazione
Se i tre elementi del filtro con le relative funzioni del sistema E(z), F(z) e G(z) sono sistemati nella configurazione positiva di controreazione in figura.
la funzione di trasferimento totale della rete di controreazione èdata da:
(5.1.3) )()(1
)()()(zGzF
zFzEzH−
=

M. Usai Circuiti digitali 5_a 7
La funzione di trasferimento della rete in controreazione èfacilmente deducibile relazionando X(z), Y(z) e W(z) e presenta proprietà analoghe a quelle corrispondenti della trasformata di Laplace per la reti continue nel tempo.
La funzione di trasferimento risulta uguale alla funzione di trasferimento diretta , divisa per uno meno la funzione di trasferimento dell’anello (loop): , infatti: ( ) ( ) ( ) ( ) ( )[ ] ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( )( )
( ) ( ) ( ) 1 ( ) ( )
Y z E z X z G z Y z F z
Y z G z F z Y z X z E z F z
Y z E z F zH zX z F z G z
= +
− =
= =−
)()( zFzE)()(1 zGzF−

M. Usai Circuiti digitali 5_a 8
Reti trasposte
Se nel diagramma di flusso relativo a un filtro a tempo discreto:
le direzioni di tutti i rami del diagramma di flusso vengono invertite, scambiando l'ingresso con l'uscita e viceversa,
la funzione di trasferimento della trasposta risultante è la stessa di quella della rete originaria.
• Tutti i nodi dei rami (branch nodes) della rete originale diventano nodi sommatori nella rete trasposta e
• analogamente i nodi sommatori (summation nodes) diventano nodi di rami.
Praticamente:• la forma diretta realizza prima gli zeri e poi i poli, mentre • la forma diretta trasposta realizza prima i poli e poi gli zeri.
M. Usai Circuiti digitali 5_a 9
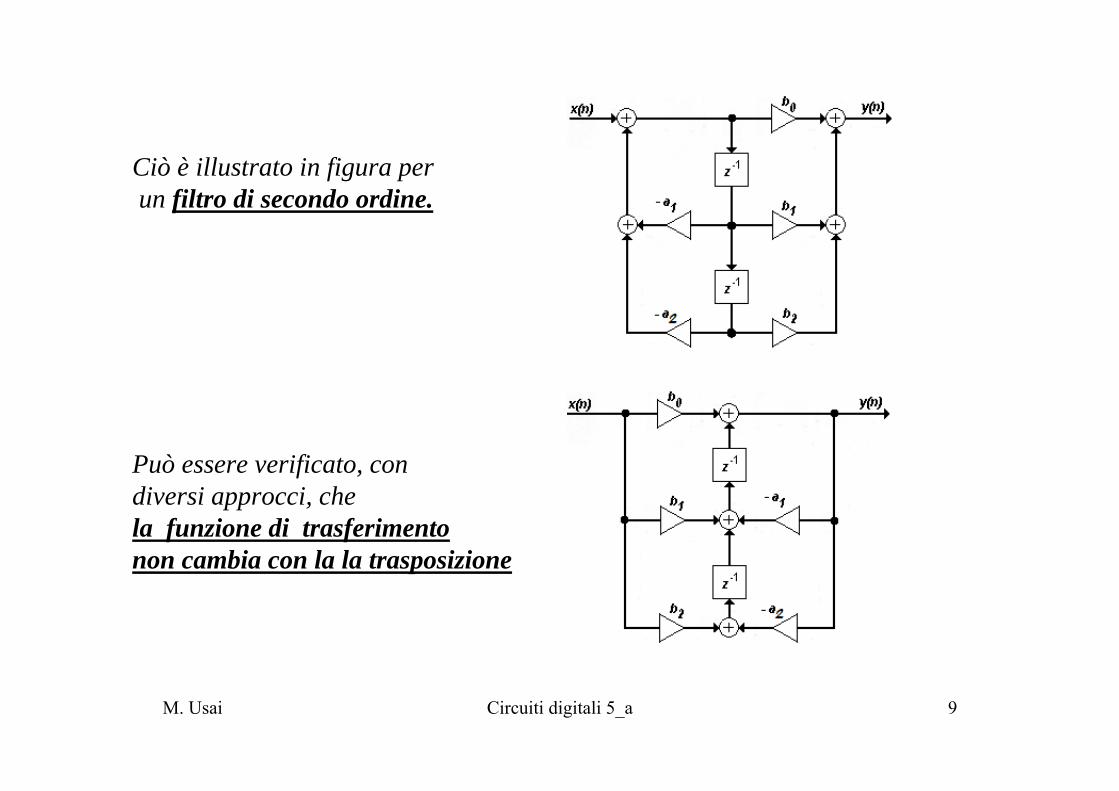
Ciò è illustrato in figura perun filtro di secondo ordine.
Può essere verificato, condiversi approcci, che la funzione di trasferimentonon cambia con la la trasposizione

M. Usai Circuiti digitali 5_a 10
Esempio: si consideri la rete di figura nella forma delle variabili di stato, si ottiene la descrizione delle variabili di stato della rete trasposta mostrata in fig. 5.3.
Fig. 5.3 Rappresentazione con le variabili di stato e relativa trasposta
Si noti che c sostituisce b e bt sostituisce ct e At sostituisce A.
n
1n
1nt zbAcdH(z) −∞
=
−∑+=
n
1n
1ntt zcAd(z)H −
∞
=
−∑+= tb

M. Usai Circuiti digitali 5_a 11
Inoltre il guadagno aij da sj(n) a si(n+1) diventa il guadagno da si(n) a sj(n+1) nella rete trasposta, quindi aji deve sostituire aij.
La funzione di trasferimento per la rete trasposta è quindi:
(5.1.6)Ma questa è proprio la matrice trasposta della matrice H(z) e
quindi H(z)=H'(z), che dimostra l'asserzione. Sebbene• H(z) e i suoi output associati y(n) sono invariati nella
trasposizione, • i vettori di stato prima e dopo la trasposizione
saranno in generale del tutto diversi.Fare la trasposizione è dunque uno dei metodi che possono
essere utilizzati per modificare e/o ottimizzare la struttura e la rappresentazione di un filtro digitale.
(n)s e s(n)
n
1n
1ntt zcAd(z)H −
∞
=
−∑+= tb
M. Usai Circuiti digitali 5_a 12
5.2 Strutture di rete
La varietà delle possibili strutture di rete a tempo discreto èmolto ampia e varia e il problema della definizione di strutture ottimali dei filtri digitali è allo stato attuale un importante tema di ricerca.
La maggior parte dell'analisi comparativa di strutture di rete è fattibile quando si studiano gli effetti della quantizzazione, perché soltanto quando vengono considerati gli effetti della quantizzazione, si presentano le differenze significative nella realizzazione di strutture di reti diverse.
In questo capitolo saranno introdotte le proprietà di base delle strutture più comuni.

M. Usai Circuiti digitali 5_a 13Fig. 4.3 Implementazione diretta della equazione alle differenze
-
-
M N
m km 0 k 1
y(n) b x(n m) a y(n k)= =
= − − −∑ ∑
Forma diretta di un filtro

M. Usai Circuiti digitali 5_a 14
Forma diretta
La struttura precedentemente mostrata in fig. 4.3 riportata nella slide precedente, è anche chiamata forma diretta di un filtro a tempo discreto, perché è una implementazione diretta della equazione base alle differenze:
∑∑==
−−−=N
kk
M
mm knyamnxbny
10
(4.2.2) )()()(

M. Usai Circuiti digitali 5_a 15
Cioè, ponendo:
dove a0=1.Il diagramma di figura 4.3 realizza la funzione di trasferimentoH(z)=H1(z)H2(z), con H1(z) per prima seguita da H2(z).Per i filtri IIR possono essere generate strutture più efficienti con numero minimo di blocchi di ritardo, invertendo l'ordine delle due sezioni di filtro, che risultano effettivamente collegate in cascata.
(5.2.1)
1)(
1)(
e )()(
0
2
01
∑
∑
=
−
=
−
==
==
N
k
kk
M
m
mm
zazDzH
zbzNzH
-
-
H1(z) H2(z)

M. Usai Circuiti digitali 5_a 16
Invertendo questo ordine ed eliminando un numero di blocchi di ritardo pari al min (N, M),diventati ridondanti, si ottiene la struttura mostrata in fig.5.4 per M=N che chiameremo nella forma diretta II.
Sebbene la forma diretta IIsoddisfa ancora l'equazione alle differenze in (4.2.2), ma non implementa direttamente questa equazione alle differenze .
Fig. 5.4 Rappresentazione con la forma diretta II

M. Usai Circuiti digitali 5_a 17
→
Implementazione con la forma diretta 2
-
-
Implementazione diretta
Implementazioni diretta della equazione alle differenze

M. Usai Circuiti digitali 5_a 18
La forma diretta II è invece una implementazione diretta delle equazioni che legano x(n), y(n) e w(n) come segue:
Si noti che questa struttura è ancora ricorsiva per l’output intermedio ω(n) ma non per l’output finale y(n).
∑
∑
=
=
−=
−−=
M
mm
N
kk
mnbny
knanxn
0
1
(5.2.3) )()(
)()()(
ω
ωω
x(n) ω(n) y(n)H2*(z) H1*(z)
M. Usai Circuiti digitali 5_a 19
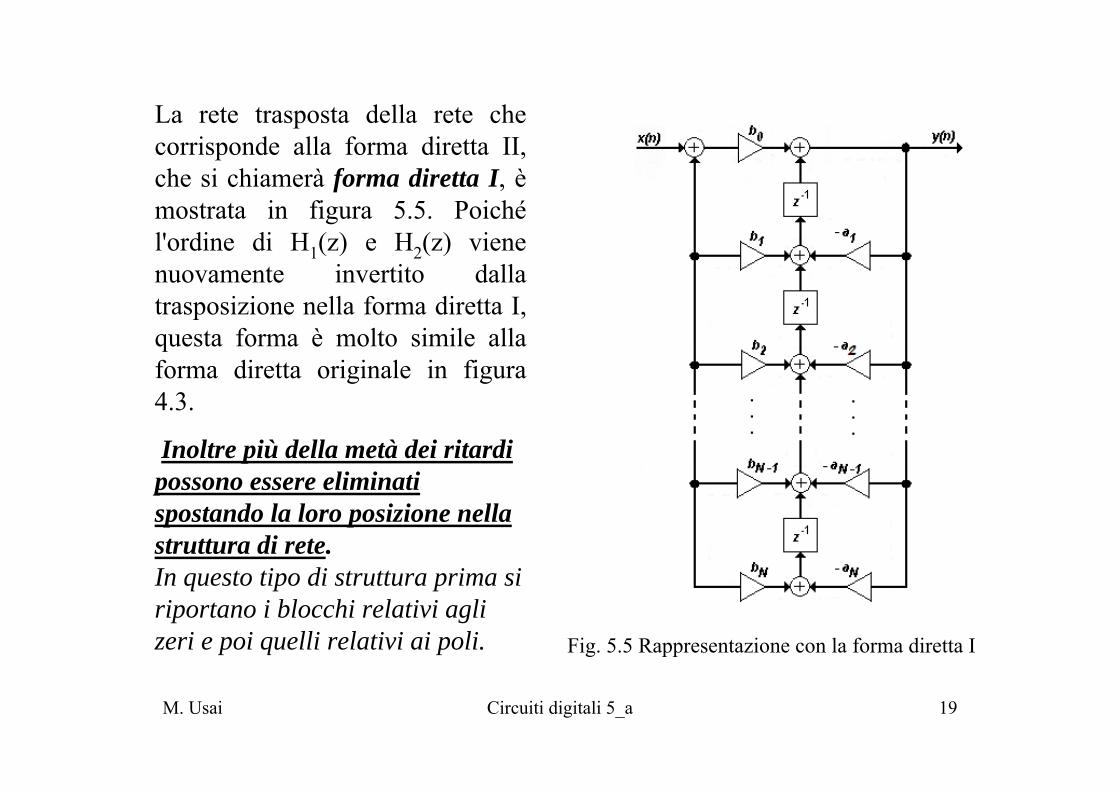
La rete trasposta della rete che corrisponde alla forma diretta II, che si chiamerà forma diretta I, èmostrata in figura 5.5. Poichél'ordine di H1(z) e H2(z) viene nuovamente invertito dalla trasposizione nella forma diretta I, questa forma è molto simile alla forma diretta originale in figura 4.3.
Inoltre più della metà dei ritardi possono essere eliminati spostando la loro posizione nella struttura di rete. In questo tipo di struttura prima si riportano i blocchi relativi agli zeri e poi quelli relativi ai poli. Fig. 5.5 Rappresentazione con la forma diretta I

M. Usai Circuiti digitali 5_a 20
Le forme dirette I e II sono esempi diretti di strutture canoniche, che in generale realizzano la funzione di trasferimento data conun minor numero di ritardi, di sommatori e di moltiplicatori.Assumendo M=N, come spesso accade nel caso di filtri IIR,il numero di ciascuno di questi componenti richiesto in una implementazione canonica è come segue:numero di ritardi =N,numero di sommatori =2N,numero di moltiplicatori=2N+1 (5.2.3)
Come sommatori intendiamo sommatori di due input, e quindi un nodo sommatore con F input implica F-1 sommatori nella implementazione.Si può verificare che la (5.2.3) è realmente soddisfatta attraverso la forme dirette I e II quando M=N.

M. Usai Circuiti digitali 5_a 21
Forme parallele
L'espressione di H(z) in uno sviluppo a frazioni parziali (fratti) porta ad altre strutture canoniche chiamate forme parallele.
Per ottenere coefficienti reali multipli nella struttura del filtro, i termini nello sviluppo a frazioni parziali, che corrispondono a coppie di poli complessi coniugati, devono essere combinati in termini del II ordine; e risulta conveniente, sia per la notazione che per l'implementazione, combinare anche i poli reali in coppie.

M. Usai Circuiti digitali 5_a 22
Si ottiene così la seguente forma di funzione di trasferimento, assumendo che M=N;
con
dove il simbolo [ ] int significa "la parte intera di".Se N è dispari, nella H(z) è presente un termine del I° ordine in (5.2.4) per i=L, e quindi γ1L=α2L=0.
(5.2.4) 1
* 1
)(
12
21
1
110
0
110
∑
∑
=−−
−
=−
+++
+=
−+=
L
i ii
ii
N
k k
k
zzz
zpAzH
ααγγγ
γ
(5.2.5) 2
1NLint⎥⎦⎤
⎢⎣⎡ +
=

M. Usai Circuiti digitali 5_a 23
* L’espressione dello sviluppo precedente si può facilmente verificare, infatti accorpando i fratti a due a due, si ha:
( ) ( )
( ) ( )
( ) ( )
(5.2.4) 1
)(
)(
:ponendo
)(1
1
11
111
)(
12
21
1
110
0
1211
11110
122
11
1
1111
0
122
111
1
11
11
0
121
1
110
110
∑
∑
∑
∑∑
=−−
−
−−
−−−
+=−
−−
−
−−−−
+=−
−−−
−
−−
−−
+=−
−
−−
=−
+++
+=
⎩⎨⎧
=+−=+−=+=
⎟⎟⎠
⎞⎜⎜⎝
⎛
++−+−+
+=
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−−−+−
+=
⎟⎟⎠
⎞⎜⎜⎝
⎛
−+
−+=
−+=
L
i ii
ii
iiiiii
iiiiiiii
L
ki iiii
iiiiii
L
ki iiii
iiii
L
ki i
i
i
iN
k k
k
zzzzH
pppppApAAA
zppzppzpApAAA
zppzpzpzpAzpA
zpA
zpA
zpAzH
ααγγγ
ααγγ
γ
γ
γγ
M. Usai Circuiti digitali 5_a 24
Di seguito si ricercheranno proprietà addizionali per questi coefficienti dei filtri. L'equazione (4.4.29) riportata di seguito, corrisponde a una struttura parallela simile, ma differente.
Poiché la funzione di trasferimento in (5.2.4) è espressa come somma dei termini del II° ordine, le implementazioni corrispondenti devono essere combinazioni parallele di reti del II° ordine o sezioni (section).
1
ˆˆ
1
1ˆˆ
1
ˆˆ
1ˆˆ
)(
121
1
12
21
1
22
11
121
1
11*
1**
1
1
∑∑
∑∑
+=−
−
=−−
−−
+=−
−
=−
−
−
−
−+
+++
+=
=−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
−+
−+=
N
ki i
iiK
i ii
ii
N
ki i
iiK
i i
ii
zzcb
zzzzd
zzcb
z
zcb
zzcbdzH
i
ii
λσασσ
λλλ
M. Usai Circuiti digitali 5_a 25
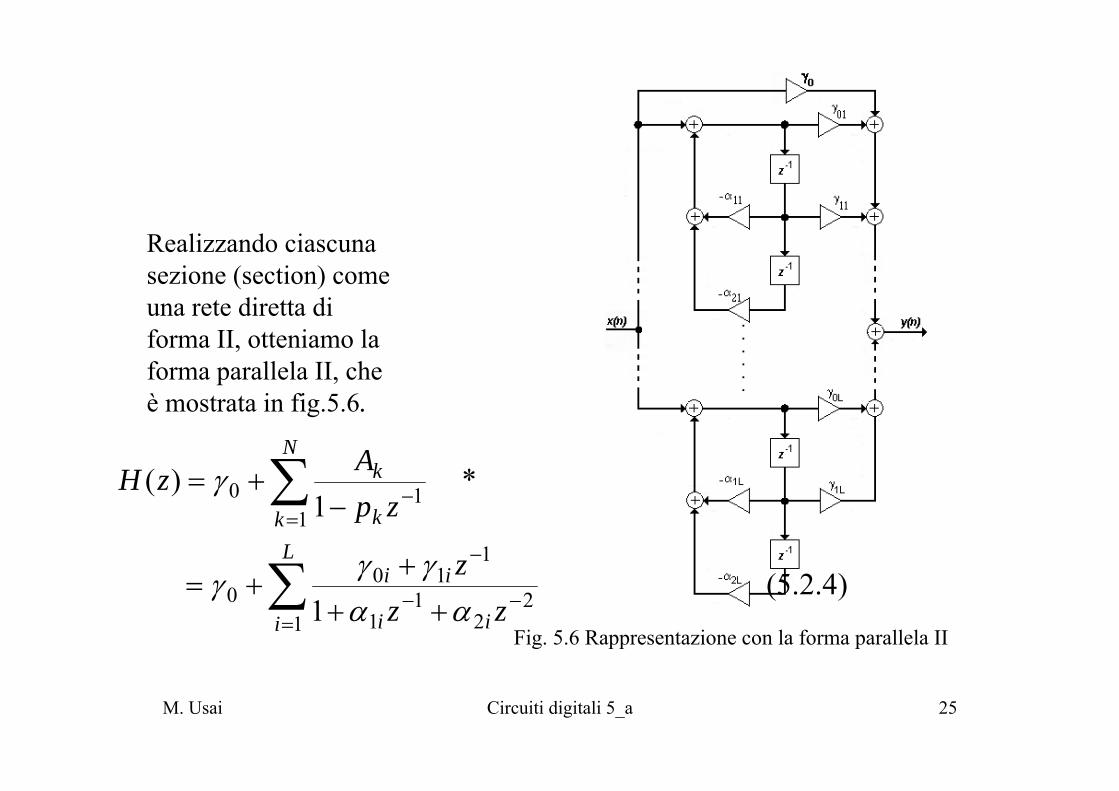
Realizzando ciascuna sezione (section) come una rete diretta di forma II, otteniamo la forma parallela II, che è mostrata in fig.5.6.
Fig. 5.6 Rappresentazione con la forma parallela II
(5.2.4) 1
* 1
)(
12
21
1
110
0
110
∑
∑
=−−
−
=−
+++
+=
−+=
L
i ii
ii
N
k k
k
zzz
zpAzH
ααγγγ
γ
M. Usai Circuiti digitali 5_a 26
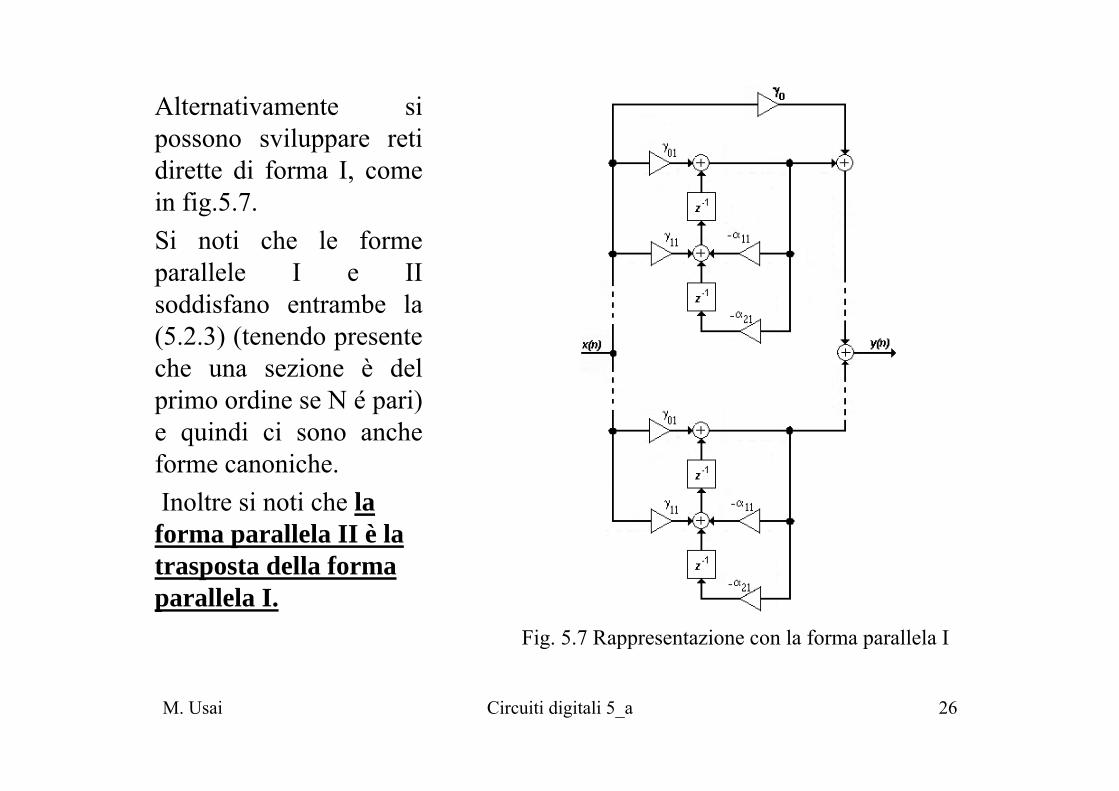
Alternativamente si possono sviluppare reti dirette di forma I, come in fig.5.7. Si noti che le forme parallele I e II soddisfano entrambe la (5.2.3) (tenendo presente che una sezione è del primo ordine se N é pari) e quindi ci sono anche forme canoniche.Inoltre si noti che la forma parallela II è la trasposta della forma parallela I.
Fig. 5.7 Rappresentazione con la forma parallela I
M. Usai Circuiti digitali 5_a 27
Forma in cascata
Se oltre alla fattorizzazione del polinomio a denominatore D(z) in (5.2.1), nei fattori del secondo ordine come per la forma parallela, viene fattorizzato nello stesso modo il polinomio a numeratore N(z), la funzione del sistema può essere scritta comeil prodotto:
dove
L è ancora dato da (5.2.5) e α2L = β2L =0 se N è dispari.
∏∏==
−
−
=−−
=L
ii
N
k k
k zHbzpzzbzH
10
11
1
0 (5.2.6) ** )(11)(
(5.2.7) 11)( 2
21
1
22
11
−−
−−
++++
=zzzzzH
ii
iii αα
ββ

M. Usai Circuiti digitali 5_a 28
** L’espressione dello sviluppo precedente si può facilmente verificare, infatti accorpando i fratti a due a due, si ha:
( )( )( )( )
∏
∏
∏∏
∏
=−−
−−
−−
−−
=−
−−
−
−−
−−
=−
−−−
−
−−
−−−
=−
−−
−−
−
=−
−
++++
==
=+−==+−=
++−++−
=
+−−+−−
=−−−−
=
=−−
=
L
i ii
iiii
kkikki
kkikki
L
k kkkk
kkkk
L
k kkkk
kkkkL
k kk
kk
N
k k
k
zzzzzHzHbzH
ppppzzzz
zppzppzzzzzzb
zppzpzpzzzzzzzb
zpzpzzzzb
zpzzbzH
12
21
1
22
11
0
1211
1211
12
11
1
21
11
0
12
111
1
21
111
01
11
1
11
1
0
11
1
0
1
1)(con )()(
)( )(
:ponendo )(1
)(1
11
1 11 1
11)(
ααββ
ααββ

M. Usai Circuiti digitali 5_a 29
Poiché H(z) è il risultato del prodotto di funzioni Hi(z) del II ordine, la
corrispondente struttura del filtro comprende una
cascata di sezioni del secondo ordine.
Implementando queste sezioni nelle forme dirette
II e I, si ottengono le forme a cascata del II e I,
rispettivamente, come riportato in figura 5.8 e
5.9.
Fig. 5.8 Rappresentazione con la forma in cascata II
Fig. 5.9 Rappresentazione con forma in cascata I
M. Usai Circuiti digitali 5_a 30
Si può verificare che queste strutture sono anche canoniche e che sono legate nella topologia attraverso la trasposizione.
Quindi la forma a cascata II diventa la trasposta attuale della forma I soltanto se l'ordine delle sezioni del filtro è invertita da una forma all'altra. Ovviamente si possono ottenere molte altre strutture del filtro usando, per esempio:• combinazioni di forme in cascata e in parallelo;• diversi dispositivi in controreazione; • sviluppi o espansioni in fratti di H(z) e così via.

M. Usai Circuiti digitali 5_a 31
Inoltre si possono generare molte strutture addizionali per analogia con i classici filtri continui nel tempo come:
• wave digital filter;• ladder structures e• lattice structures.Saranno esaminate alcune di queste strutture.
Le strutture più comuni dei filtri digitali sono:• le forme diretta, • parallela e • in cascata e di queste, le forme in cascata sono spesso impiegate per i filtri
IIR per motivi legati alla quantizzazione e implementazione.
M. Usai Circuiti digitali 5_a 32
5.3 Proprietà dei coefficienti di rete
Molte proprietà di un filtro discreto nel tempo si possono determinare velocemente attraverso l’esame dei coefficienti di certe strutture di rete.Nel caso dei filtri IIR le informazioni relative:•alla stabilità, •le singolarità reali e complesse, •transmission zeros e •effetti di quantizzazione. sono facilmente ottenibili dai coefficienti della forma a cascata o dai coefficienti della forma parallela.

M. Usai Circuiti digitali 5_a 33
Per i filtri FIR proprietà, come
•la fase lineare,
•il ritardo di fase di 90° o
•la risposta in frequenza simmetrica
sono deducibili dai coefficienti della forma diretta o da certe strutture in cascata.

M. Usai Circuiti digitali 5_a 34
PremessaI fattori del denominatore delle forme in cascata e in parallelo, e i fattori del numeratore della forma in cascata sono tutte funzioni quadratiche riconducibili alla forma:
dove le radici q1i e q2i sono le corrispondenti posizioni delle singolarità (poli o zeri) nel piano z.Le radici possono essere reali o complesse, ma in entrambi i casi:
dove:• se (c1i)2 ≥ 4c2i, le radici sono reali,• mentre se (c1i)2 < 4c2i , le radici sono complesse coniugate.
(5.3.1) )1)(1(1)( 12
11
22
11
−−−− −−=++= zqzqzczczF iiiii
(5.3.3) (5.3.2) )(
212
211
iii
iii
qqcqqc
=+−=

M. Usai Circuiti digitali 5_a 35
Inoltre essendo:
dove
• ri è il raggio delle singolarità nel piano z, e
• ±θi sono gli angoli corrispondenti.
Perciò le posizioni dei poli sono facilmente calcolabili dai coefficienti delle forme in parallelo e in cascata e gli zeri sono determinabili allo stesso modo
⎪⎩
⎪⎨⎧
==
−=−=
==
(5.3.5) qc
(5.3.4) cos2)Re(2c: ha si ,
22i2i
1i
*21
i
iii
iii
r
rqqqq
ϑ
ri
θi

M. Usai Circuiti digitali 5_a 36
Condizioni di stabilità del sistema sui coefficienti del denominatore di H(z)
Essendo i valori dei poli strettamente legati ai valori dei coefficienti, si possono facilmente ottenere le condizioni sui coefficienti per garantire la stabilità del filtro dall'esame dei coefficienti dei denominatori delle forme in parallelo e in cascata.
Specificamente i fattori del denominatore del secondo ordine di questa forma sono dati da:
la condizione necessaria , ma non sufficiente per la stabilità comporta che i poli siano all'interno del cerchio unitario per la stabilità, cioè: |p1i|, |p2i|<1, per la (5.3.3) diventa:
|α2i| = |p1i p2i|<1. (5.3.6)
per cui nel piano (α1i,, α2i), la retta α2i = 1 delimita il campo di definizione.
)1)(1(1)( 12
11
22
11
−−−− −−=++= zpzpzzzD iiiii αα

M. Usai Circuiti digitali 5_a 37
La corrispondente condizione su α1i, si ottiene imponendo che : e
e sostituendo le espressioni in funzione dei coefficienti del polinomio di 2°:si ottiene : |α1i|<1+α2i. ***, per cui le rette
-α1i=1+α2i e α1i=1+α2i delimitano il campo. Le condizioni trovate sono illustrate
in figura 5.10, che mostra il triangolo della stabilità risultante nel piano α1 e α2. Cioè la parte del polinomio del secondo ordine è stabile se e solo se α1i e α2idefiniscono un punto che giace all'interno di questo triangolo.
24 2
211
2,1iii
ii ppααα −±−
=
11 <ip 12 <ip
Fig. 5.10 Regione dei valori dei coefficienti per i quali il filtro del secondo ordine è stabile

M. Usai Circuiti digitali 5_a 38
*** Infatti le seguenti condizioni sui poli: e
considerando le espressioni delle soluzioni del denominatore diventano:
( ) ( )
c.v.d.ii
iiii
iiii
iiii
iiiiiiii
iiiiii
iiiiii
iiiiii
iii
1:a oequivalgon relazioni due le
1 1 1 1
1- 1 444 444
2- 4 2 4
2- 4 24
1- 2
4 1
24
:nidisequazio seguenti due delle sistema al equivale che 12
4
21
2121
2121
1212
2112
21
2112
21
212
21
212
21
122112
21
22112
211
221 1
αα
αααααααα
αααααααααααα
αααααα
αααααα
αααααα
ααα
+<
+<+<−−−<−−−>
−>+<−+−>−++<−
+>−+<−
+>−+<−
>−−
<−−
<−−
mm
mm
m
11 <ip 12 <ip

M. Usai Circuiti digitali 5_a 39
Come precedentemente sottolineato i poli α1i e α2i sono complessi quando(α1i)2 < 4α2i
e sono reali in tutti gli altri casi.
Ciò comporta che la parabola : α2i =1/4(α1i)2 con vertice nell’origine degli assi sia il luogo dei punti per i quali i poli sono reali coincidenti, ossia la curva che separa la regione relativa a poli reali distinti da quella con poli complessi coniugati.
- - - - - - - - - - -
Molto spesso gli zeri di H(z) giacciono sul cerchio di raggio unitario nel piano z.Ciò è sempre vero per i filtri discreti nel tempo derivati da trasformazioni bilineari dei classici modelli continui nel tempo.
24 2
211
2,1iii
ii ppααα −±−
=

M. Usai Circuiti digitali 5_a 40
Se questi zeri sono complessi coniugati (includendo il caso in cui i due zeri sono uguali reali), allora dalla (5.3.5) i coefficienti a numeratore β2i della forma a cascata devono essere unitari.
Così, in questo caso essendo ri=1: β1i =-2cosθi e β2i =1.
⎪⎩
⎪⎨⎧
==
−=−===
q
cos2)Re(2 : ha si , 22
i2i
1i*21
i
iiiii r
rqqqq
β
ϑβ
q1i
θi
q*1i
-θi
Re
Im

M. Usai Circuiti digitali 5_a 41
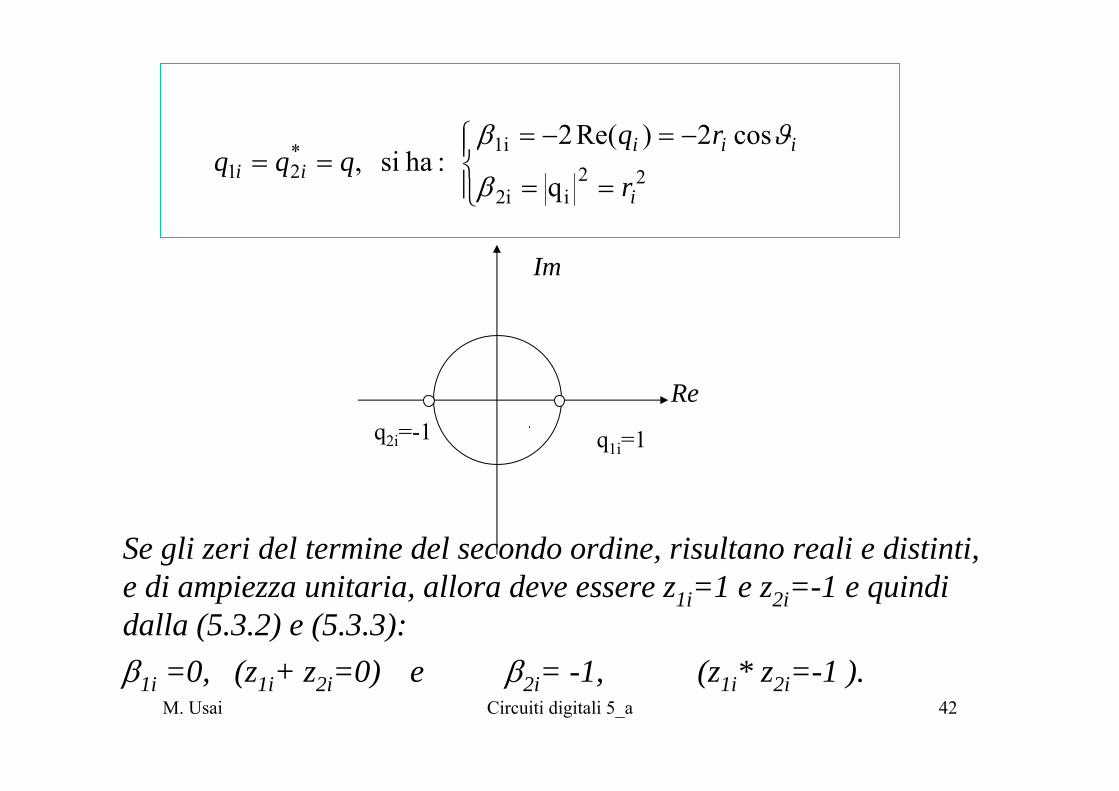
Se inoltre gli zeri sono reali e coincidenti θi =0 e si ha: β1i =±2 e
β2i =1 .
q1i=q2i=1Re
Im
q1i=q2i=-1Re
Im
⎪⎩
⎪⎨⎧
==
−=−===
q
cos2)Re(2 : ha si , 22
i2i
1i*21
i
iiiii r
rqqqq
β
ϑβ
M. Usai Circuiti digitali 5_a 42
Se gli zeri del termine del secondo ordine, risultano reali e distinti, e di ampiezza unitaria, allora deve essere z1i=1 e z2i=-1 e quindi dalla (5.3.2) e (5.3.3):β1i =0, (z1i+ z2i=0) e β2i= -1, (z1i* z2i=-1 ).
q1i=1
Re
Im
q2i=-1
⎪⎩
⎪⎨⎧
==
−=−===
q
cos2)Re(2 : ha si , 22
i2i
1i*21
i
iiiii r
rqqqq
β
ϑβ
M. Usai Circuiti digitali 5_a 43
Inoltre se il numeratore è del primo ordine con un solo zero, allora :
β1i =±1 e β2i= 0.
Quindi, in tutti i casi in cui sono presenti zeri sul cerchio unitario, i coefficienti β2i della forma a cascata sono sempre interi ±1 o 0, e i coefficienti β1i sono interi anche loro (±2, ±1 o 0) se gli zeri sono reali.
Per questa ragione, i moltiplicatori β2i sono riportati con linea tratteggiata in figura 5.8 e 5.9 perché gli attuali moltiplicatori non sono richiesti per implementare questi coefficienti interi.
Ciò spiega in parte la divulgazione della forma a cascata con modelli, poiché con filtri aventi zeri sul cerchio unitario, può essere risparmiato dal 25% al 50% del tempo di moltiplicazione (o hardware).