6. rectification 2 hours - uacg.bg · ... master course photogrammetry 2003 b. marinov . lecture 6...
TRANSCRIPT

Lecture 6 - 1 - 11/2/2003 ____________________________________________________________________________________
Concept Hell/Pfeiffer February 2003 ___________________________________________________________________________________
6. Rectification 2 hours Aim: Principles for rectification Theory: Indirect rectification in digital image processing Methods of rectification and integration in programs ___________________________________________________________________________________ 6.1. The deformations of metric photograph A line map is unsatisfactory for some regions (undeveloped areas). Photo-map is a map that
shows the content of the aerial photographs and is better solution. Photo maps are significantly
less expensive and quicker for producing in comparison to conventional topographic line maps.
The deformations of images, including photographs are described in differential geometry by
means of the Tissot indicatrix. This theory is developed for analytical surfaces. Ground surface is
represented in photogrammetry by digitizing a large set of individual points on the surface
Another method is based on the closely spaced discrete points, defined by their XYZ-coordinates.
The deformation between photograph and terrain are described by co-linearity equations
11 0 21 0 31 0
13 0 23 0 33 0
12 0 22 0 32 0
13 0 23 0 33 0
.( ) .( ) .( ).
.( ) .( ) .( ).( ) .( ) .( )..( ) .( ) .( )
i i ip
i i i
i i ip
i i i
r X X r Y Y r Z Zx x cr X X r Y Y r Z Zr X X r Y Y r Z Zy y cr X X r Y Y r Z Z
− + − + −− = −
− + − + −− + − + −
− = −− + − + −
(6.1)
Geometrically this deformation is presented in the next figure
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 2 - 11/2/2003 ____________________________________________________________________________________
Figure 6.1. Relations between grids in object and photo
The estimation of deformation can be obtain by the deformation of square grid, shown on the
next figure
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 3 - 11/2/2003 ____________________________________________________________________________________
1 2
3 4
1’ 2’
3’ 4’
ξ
η Y
X
Figure 6.2. Deformations of square grid
Deformations in length in X and Y directions are given by expressions
12 13 , x yX Yδ δλ λ=∆ ∆
= (6.2)
where 2( ) (ik i k i kδ ξ ξ η η= − + − 2) (6.3)
Deformations of grid and photos due to the projection and terrain are presented in the next figure
Figure 6.3. Deformed grid of aerial photograph
For plane object surface the deformation can be see very clearly in comparison with XY-grid of
the object
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov
Lecture 6 - 4 - 11/2/2003 ____________________________________________________________________________________
ξ
η Y
X
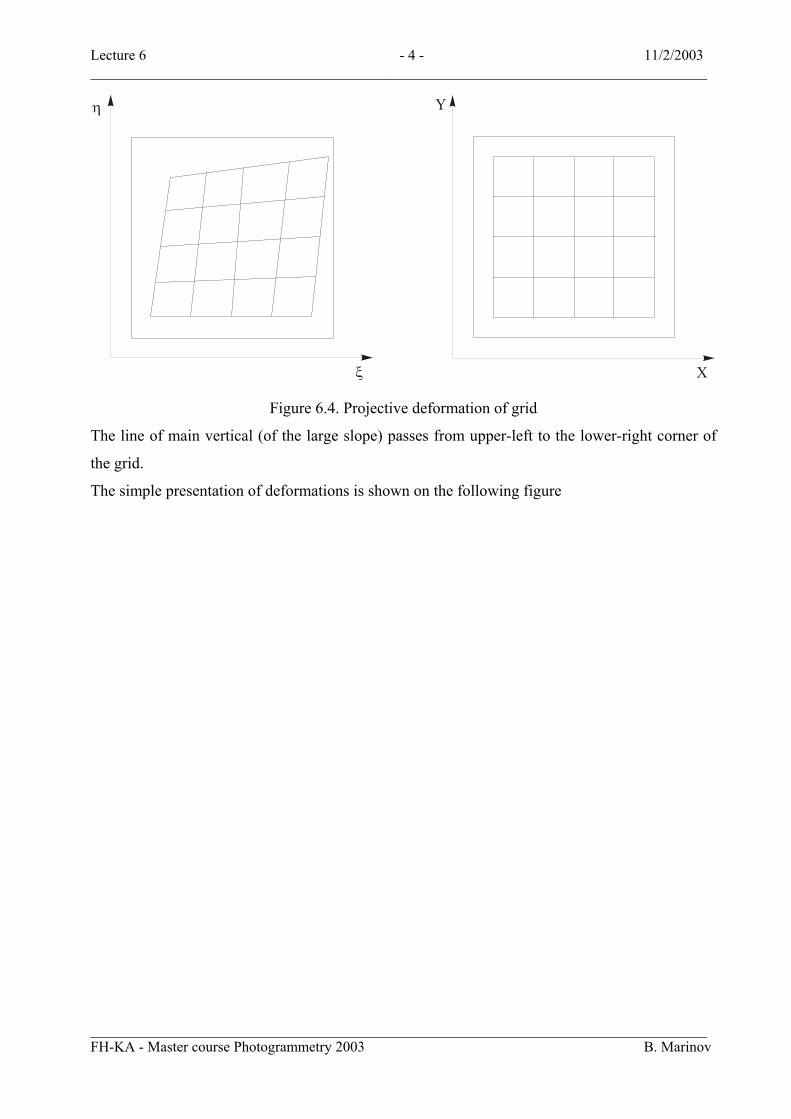
Figure 6.4. Projective deformation of grid
The line of main vertical (of the large slope) passes from upper-left to the lower-right corner of
the grid.
The simple presentation of deformations is shown on the following figure
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 5 - 11/2/2003 ____________________________________________________________________________________
ντ
τ
0
ρ
ρ
0
a
a 0
A
pn p
N
0 0
n
O
Figure 6.5. Reduction of length in tilted photograph.
The radial displacement of point position with radius ρ for small angles of tilt ν is presented by
expression 2
.vc
ρρ∆ = (6.4)
where 2 2ρ ξ η= + and 2 2ρ ξ η∆ = ∆ + ∆
The increase or reduction of small lengths dρ is obtained by differentiating the previous
expression
( ) 2. . .dc
dρρ ν ρ∆ = (6.5)
The photograph is similar to the orthophoto (without geometrical distortions) if the object plane
and image plane are made parallel. The images that does not lye in this plane are displaced from
there actual position depending on the difference of distance from the projection center (that
means different height for aerial photos).
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov
Lecture 6 - 6 - 11/2/2003 ____________________________________________________________________________________
P2
A’
A
B
O
∆R b
B’
∆ρa∆ρb
a’ab b’bρ ρa
p
∆ZA
∆RA∆ZB
Z0
c
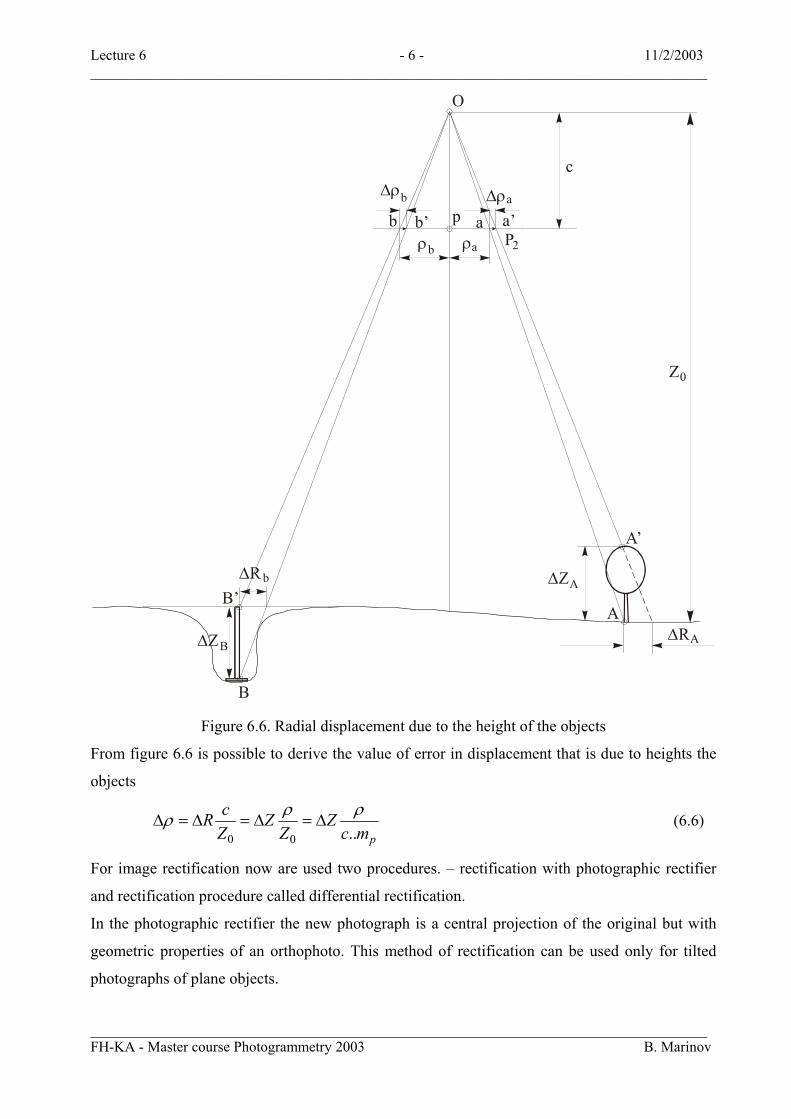
Figure 6.6. Radial displacement due to the height of the objects
From figure 6.6 is possible to derive the value of error in displacement that is due to heights the
objects
0 0 .. p
cR Z ZZ Z c m
ρ ρρ∆ = ∆ = ∆ = ∆ (6.6)
For image rectification now are used two procedures. – rectification with photographic rectifier
and rectification procedure called differential rectification.
In the photographic rectifier the new photograph is a central projection of the original but with
geometric properties of an orthophoto. This method of rectification can be used only for tilted
photographs of plane objects.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 7 - 11/2/2003 ____________________________________________________________________________________
6.2. Rectification by central perspective transformation There are two possible methods for perspective rectification – with and without establishment of
inner orientation parameters in the rectifier.
6.2.1. Perspective rectification with establishment of inner orientation The inner and outer orientation of original photograph must reestablished for the solution of
rectification task.
Figure 6.7. Rectifier with reestablished inner and outer orientation
The projector has fiducial marks for reestablishements of the inner orientation. Three elements of
outer orientation can be set: z0 of the projector, rotations ω and φ.
00
0
Zzm
= (6.7)
where m0 is the scale factor of the orthophoto ____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 8 - 11/2/2003 ____________________________________________________________________________________
The focal length of the projector lens must be different from the focal length of the original
camera lens. This rectifier requires three control points from which the six elements of outer
orientation can be determined (from them only three are important for rectification).
6.2.2. Perspective rectification with reestablishment of inner orientation. It is necessary to satisfy two optical condition to achieve a sharp projected image over the full
format.
Optical conditions
The plane of the photograph in the rectifier must be tilted relative to the optical axis. This
condition however is not satisfied in metric cameras where the plane of photograph is
perpendicular to the optical axis of the camera.
First optical condition is called Scheimpflug condition, because T.Sheimpflug first developed it.
importance. It says that plane of the photograph IP, the principle plane of the objective He
and the plane of the projection stage PS must intersect in the same straight line S. This is
shown at the figure 6.8.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov
Lecture 6 - 9 - 11/2/2003 ____________________________________________________________________________________
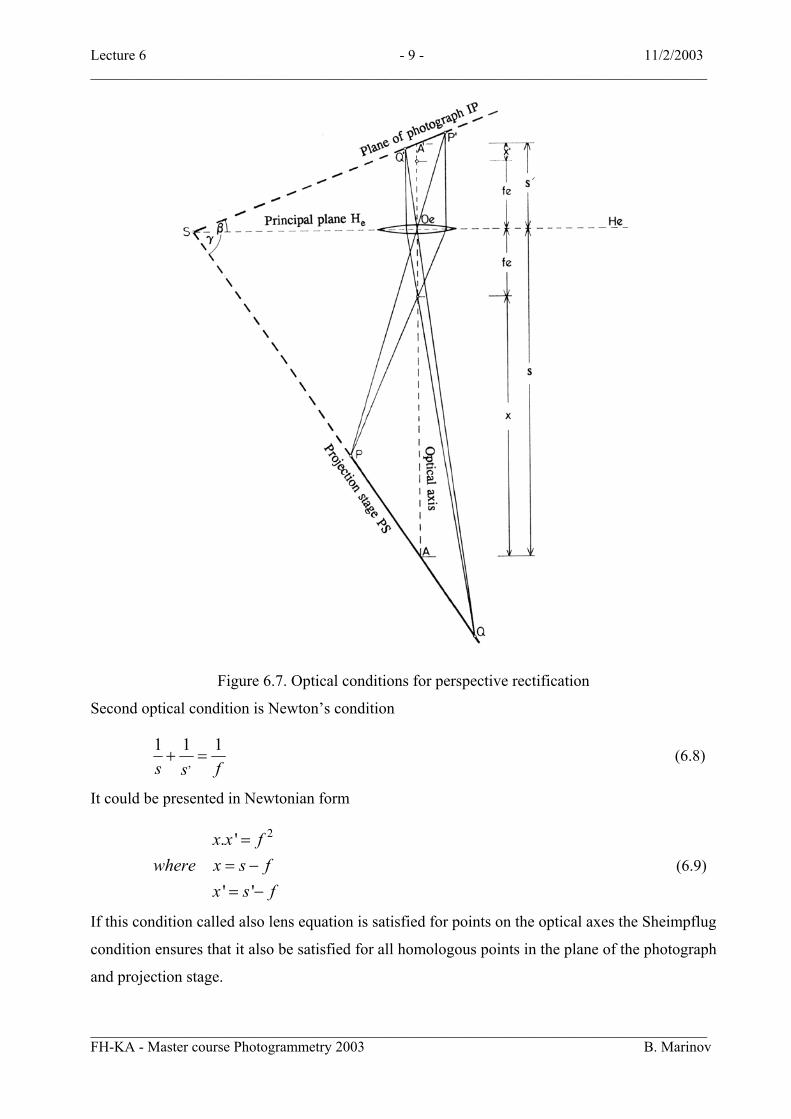
Figure 6.7. Optical conditions for perspective rectification
Second optical condition is Newton’s condition
,1 1 1s fs
+ = (6.8)
It could be presented in Newtonian form
2 . '
' '
x x fwhere x s f
x s f
== −= −
(6.9)
If this condition called also lens equation is satisfied for points on the optical axes the Sheimpflug
condition ensures that it also be satisfied for all homologous points in the plane of the photograph
and projection stage.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov
Lecture 6 - 10 - 11/2/2003 ____________________________________________________________________________________
The lens equation and Scheimpflug condition are satisfied by mechanical devices, so-called
inversors and by electronic control systems in newer instruments.
Geometric conditions
The Scheimpflug condition is not satisfied when photograph is taken. It is seen in the next figure.
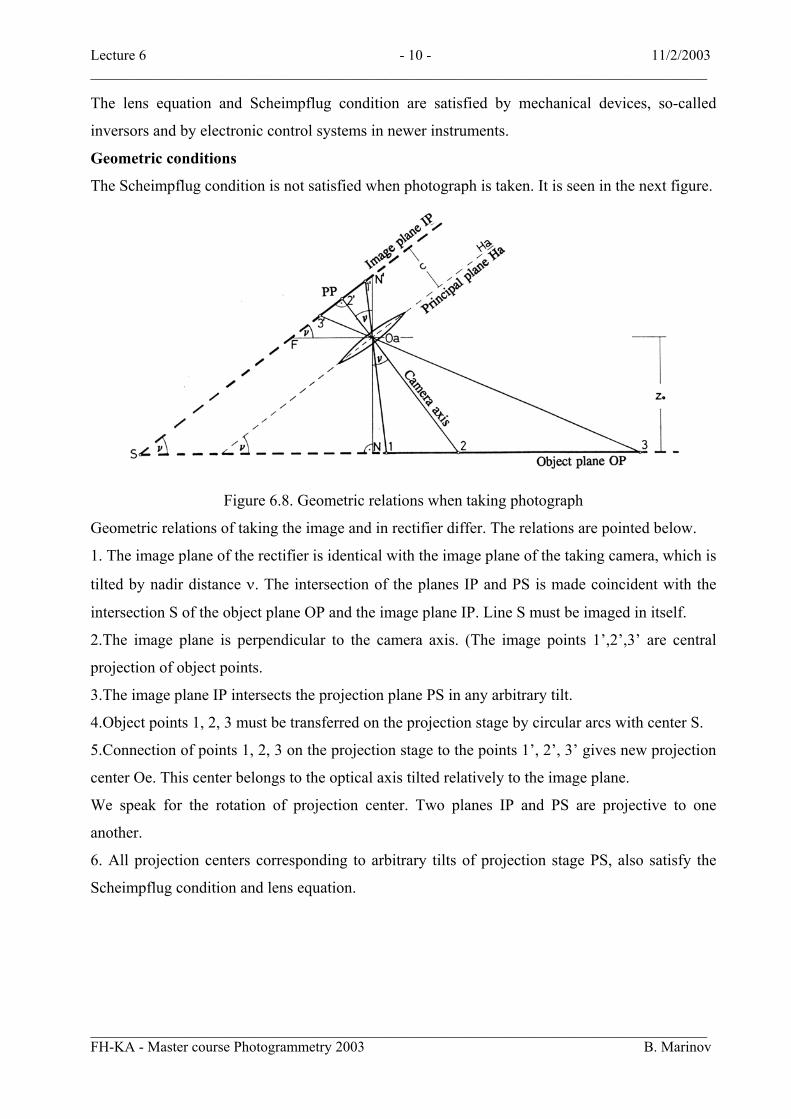
Figure 6.8. Geometric relations when taking photograph
Geometric relations of taking the image and in rectifier differ. The relations are pointed below.
1. The image plane of the rectifier is identical with the image plane of the taking camera, which is
tilted by nadir distance ν. The intersection of the planes IP and PS is made coincident with the
intersection S of the object plane OP and the image plane IP. Line S must be imaged in itself.
2.The image plane is perpendicular to the camera axis. (The image points 1’,2’,3’ are central
projection of object points.
3.The image plane IP intersects the projection plane PS in any arbitrary tilt.
4.Object points 1, 2, 3 must be transferred on the projection stage by circular arcs with center S.
5.Connection of points 1, 2, 3 on the projection stage to the points 1’, 2’, 3’ gives new projection
center Oe. This center belongs to the optical axis tilted relatively to the image plane.
We speak for the rotation of projection center. Two planes IP and PS are projective to one
another.
6. All projection centers corresponding to arbitrary tilts of projection stage PS, also satisfy the
Scheimpflug condition and lens equation.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 11 - 11/2/2003 ____________________________________________________________________________________
Figure 6.9.Rectification with not congruent bundle of rays
The relations between geometrical characteristics are shown in Appendix 1.
This rectifiers are with bundle of rays that is not congruent to that of the original photograph
Rectification with known instrument settings
When we calculate the outer orientation parameters of photo we obtain coordinates of the
projection center X0, Y0, Z0 and three rotation angles ω, φ, κ. From this parameters we must
derive the direction α, the nadir distance ϖ and swing κ.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 12 - 11/2/2003 ____________________________________________________________________________________
Figure 6.10. Definition of rectification angles
We construct new spatial rotation matrix
aR R R Rανκ ν κ= (6.10)
After expression in analytical form is possible to obtain angle elements from the coefficients of
rotation matrix
13 1333
23 32tan cos tanr rr
r rα ν= =
−κ = (6.11)
It is possible to make rectification with control points and with knowledge of the inner
orientation. For such orientation sufface three control points. However usually four control
points are used. The additional point is for check of the orientation process.
Two step procedure is used.
1. Change the projection distance
2.Tilt of projection stage about two axis (for some rectifiers only one tilt and rotation are given).
In the second case orientation procedure is more complicated.
There is possible to arrange the orientation procedure with control points, but without knowledge
of the inner orientation.
The construction of rectifiers allow two group of possibilities:
1. Group
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 13 - 11/2/2003 ____________________________________________________________________________________
• Tilts of the projection stage in two directions
• Displacement of the photograph in two directions
2. Group
• Tilt of the projection stage in one direction
• Displacement of the photograph in two directions and rotation of the
photograph.
6.2.3. Errors of perspective rectification Errors of perspective rectification depend on two types of sources. The first one is the error in
establishing the settings in the rectifier that are computed or derived from control points.
The second source of error is due to the diversity of terrain surface from assumed reference plane
for which the rectification is processed.. The errors accordingly to the errors of object heights
may be presented for small angles by equation. The derivation of errors is shown in Appendix 2
For error in the orthophoto plane we obtain the equation
. p
rr Zc m
∆ = ∆ (6.12)
The error are in radial direction from the nadir point of orthophoto. As a conclusion it must be
pointed that area of application of perspective rectification is limited to plane areas with
small diversity of height. The maximum allowed different in height from assumed plane can be
calculated by defining the permissible error (usually 1mm) at the corners of orthophoto by
solving the above equation.
. . pr c mZ
r∆
∆ = (6.13)
where ∆Z is on the terrain, and r is the displacement in orthophoto.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 14 - 11/2/2003 ____________________________________________________________________________________
A’
A
B
O
∆R b
B’
∆ρ
a
∆ρ
b
b a
∆ZA
∆RA∆ZB
Z0
∆r∆r
c
ν
np
r r
z =0 m0
Z0
N’
Z0
Figure 6.13. Radial image displacements of points outside the reference plane
The same is influence in the accuracy of the rectified photographs of buildings facades for
elements in front of or behind the plane of the facade.
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 15 - 11/2/2003 ____________________________________________________________________________________
6.3. Rectifiers 6.3.1. Classification of rectifiers Rectifiers with congruent bundle of rays are not produced because of the lack of sharpness in the
projected image. More over they need different objectives depending of required enlargement
ratio that is practically inconvenient.
There exist some photographic enlargers working with small angles of tilt.
6.3.2. Examples of optical-mechanical rectifiers Rectifiers with rigorously satisfied geometric and optical conditions are produced by firms Zeiss
Jena, Leica Heerbrugg and Zeiss Oberkochen.
Wild E4 has enlargement ratios 0.8-7.0x. Projection stage can be tilted about two perpendicular
axes up to ±15gon. Picture carrier can be displaced in two perpendicular directions up to ±4cm.
The focal length of the objective is 15cm.
The SEG6 Rectifier of Zeiss Oberkochen has approximately the same ranges as Wild E4.
The Rectimat C of Zeiss Jena was equipped with objective 15cm for enlargement ratios 0.85 to
8.0x and with objective 7cm for enlargement ratios 3.0 to 18.0x. These rectifiers can operate with
preset elements of outer orientation.
Figure 6.11. Rectifier ZEG 6
Accuracy of perspective transformation depends on the height error of terrain or the objects
6.4. Digital rectification Th main principal of digital transformation is similar to the general principal of image restoration. ____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 16 - 11/2/2003 ____________________________________________________________________________________
F (i,j) F (i,j) F (i,j)g (k,l)f (k,l)B
I O RR
Figure 6.12. Main scheme for image restoration
The possible sources for geometrical deformation are following:
But in digital rectification the object of restoration are not the radiometric properties but the
geometric properties of the images.
1. Projective transformations
2. Influence of the height of the objects
3. Lens distortions
4. Earth curvature
5. Map projection
Neverthless of source of geometrical deformation main goal of digital rectification is to reverse
the pixel position in this place, that it must have in the undisturb image of the corresponding
scale.
If we have some source of geometric distortion that is described by formulas
),(),(
,
,
IIyBo
IIxBo
jifyjifx
=
= (6.14)
Our goal is to find such reverse transformation
),(),(
,
,
OOyRR
OOxRR
jigyjigx
=
= (6.15)
In the case when the method of nearest neighbour is used the transformations take the form
]5.0),([]5.0),([
,
,
+=
+=
OOyRR
OOxRR
jigEntijigEntj
(6.16)
By reverse solution we can reach to the output coordinates (without corrections). Comparing the
values for this condition for perfect restoration
]5.0),([]5.0),([
]5.0),([]5.0),([
,1,
,1,
+=+=
+=+=
−
−
RRyIRRyRO
RRxIRRxRO
jigEntjigEnti
jigEntjigEntj (6.17)
These are conditions for geometrical restoration
),(),(
),(),(
,1,
,1,
xygxyg
xygxyg
yIyR
xIxR
=
=−
−
(6.18)
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 17 - 11/2/2003 ____________________________________________________________________________________
There are possible two schemes for digital rectification
- direct method or forward transformation;
- indirect method or reverse transformation.
In direct method the corrected coordinates of input image are calculated. Every pixel obtain its
real value coordinates in the matrix of restored image. It is possible to interpolate this value to
calculate the grey values in raster matrix. Thi smethod is shown graphically on the next figure.
g (k,l)R
m
n
o
o r
Figure 6.13. Direct transformation
Direct transformation method requires more memory because at the intermidate stage it is
necessary to keep not only the greg value but also the coordinates of transformed pixel. The
procedure for finding from which transformed pixel to calculate the interpolated values is
relatively complex.
In the indirect method is used calculation from the pixel coordinates of transformed image. For
this purposes the reverse formula is necessary to be applied. The graphic presentation of this
method is shown on the next figure
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 18 - 11/2/2003 ____________________________________________________________________________________
g (k,l)R
m
n
o
o r
-1
Figure 6.14. Indirect method
The calculated values in the input image are not integer. To calculate the grey value at the desired
point it is necessary to use some method of grey value interpolation.
There are used defferent methods:
- nearest neighbour; (square interpolation)
-bilinear interpolation;
- triangle;
-bell-shape curve;
-Gauss curve;
- sinc function (sinx/x) for different sizes of interpolation window.
The Graphical presentation and formulas for interpolation methods are shown in the Appendix 3.
Appendixes Appendix 1 From the figure 6.9 can be derived several relations
Tilt of the photograph β:
0
0.sin sineZ fSF
m ν β= = (6.19)
0
0
.sin .sinef mZ
β ν= (6.20)
m0 scale number of orthophoto.
Tilt of the stage γ:
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 19 - 11/2/2003 ____________________________________________________________________________________
sin sine
a ec fFO FOν γ
= = = (6.21)
sin .sinefc
γ ν= (6.22)
Image distance s’ - ' 'es O A=
' .cos .ees f FO tanγ β= + (6.23)
Substituting the value of eFO we find
tan' . 1tanes f β
γ
= +
(6.24)
Projection distance s - es O A=
Substituting s’ in lens equation we obtain
tan. 1tanes f γ
β
= +
(6.25)
Enlargement ratio (along the optical axis) – for straight lines in image and object perpendicular
to the optical axis
tan' tansvs
γβ
= = (6.26)
Displacement e of the principal point p from optical axis AA’.
.cot' .cotcosefe FP FA c γν
β= − = − (6.27)
Substituting the value of sinγ
2 2 2.sin cotsin cos
ee
f ce
γf γ
γ β−
= − (6.28)
Appendix 2 .. The errors accordingly to the errors of object heights may be presented for small angles by
equation.
0 0. . rr v Z v Z
Z Zρρ∆ = ∆ = ∆ = ∆ (6.29)
The value of Z0 depends on photo scale and photo scale.
0 . pZ c m= (6.30)
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 20 - 11/2/2003 ____________________________________________________________________________________
For error in the orthophoto plane we obtain the equation
. p
rr Zc m
∆ = ∆ (6.31)
The error are in radial direction from the nadir point of orthophoto.
Appendix 3 The mathematical formulation of interpolation
Presentation of restoration function
( , ) ( , ) ( , )J I
R Ij J i I
F x y F j x i y R x j x y i y=− =−
= −∑ ∑ −∆ ∆ ∆ ∆
−
(6.32)
The restoration process is described in spatial area by relation
( , ) ( , ).[ ( , ) ( , )]J I
D I Ij J i I
E x y F j x i y R x j x y i y R x j x y i y=− =−
= − − − −∑ ∑ ∆ ∆ ∆ ∆ ∆ ∆ (6.33)
The specral presentation of interpolation is obtained by Furier transformation
24( , ) ( , ) ( ,.
)R x y x y I x xs y ysj i
F R F jx y
∞ ∞
=−∞ =−∞
πω ω = ω ω ω − ω ω − ω∑ ∑
∆ ∆i (6.34)
This presentation allows easier to estimate the errors of interpolation
The presentation of different types of iterpolation function is shown in the next table
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov

Lecture 6 - 21 - 11/2/2003 ____________________________________________________________________________________
Function Graphic presentation Definition in spatial area Spectral Presentation sinc
y
sin(2 // )( , ) .(2 / ) (2 / )
2 / , T 2 /
sin(24 yx
x y x y
x xs ys
y Tx TR x yT T x T y T
T
ππ=
π π
= π ω = π ω
x y1, , ( , )
0 - otherwise xs ys
x yR ω ≤ ω ω ≤ ωω ω =
Rectangular
0
1 , x / 2, y / 2( , )
0 - otherwise
x yx y
T TT TR x y
≤ ≤=
0sin( / 2).sin( / 2)
( , )( / 2).( / 2)x x y y
x yx x y y
T TR
T Tω ω
ω ω =ω ω
Triangle 1 0 0( , ) ( , ) ( , )R x y R x y R x y= ∗ 21 0( , ) ( , )x y x yR Rω ω = ω ω
Bell-shape type
2 0 1( , ) ( , ) ( , )R x y R x y R x y= ∗ 32 0( , ) ( , )x y x yR Rω ω = ω ω
Cubic B-spline
3 0 2( , ) ( , ) ( , )R x y R x y R x y= ∗ 43 0( , ) ( , )x y x yR Rω ω = ω ω
Gauss curve
2 2
222
1( , ) .2
x y
R x y e ω
+−
σ
ω=
πσ
2 2 2( )2( , )x y
x yR eωσ ω +ω
−ω ω =
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov


Lecture 6 - 23 - 11/2/2003 ____________________________________________________________________________________
The derivation of relation for bilinear interpolation
X
Y
Z
Dy
Z
Z
Z
Z
ZZ
Dx
00
10
11
01
0d1d
0 1
00 01 10 11
11 10 01 00
.(1 ) .
= z .(1 ) . .(1 ) z .(1 ) . .
= . . z . .(1 ) .(1 ). z .(1 ).(1 )
xyx xz z zx xy y x y y xz zy y x y y x
x y x y x y xz z yx y x y x y x
δ δδ δ
= − + =
δ δ δ δ δ δ− + − + − + =
δ δ δ δ δ δ δ δ
+ − + − + − −
∆ ∆
∆ ∆ ∆ ∆ ∆ ∆
∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ y
(6.35)
____________________________________________________________________________________ FH-KA - Master course Photogrammetry 2003 B. Marinov