a framework for integrating model predictive controllers ...jbr · a framework for integrating...
TRANSCRIPT

A Framework for Integrating Model PredictiveControllers to Control Large-Scale Systems
Aswin N. Venkat1, James B. Rawlings1
and Stephen J. Wright2
1Department of Chemical and Biological Engineering2Department of Computer SciencesUniversity of Wisconsin–Madison
Future Directions in Systems and ControlAIChE Annual Meeting
October 31, 2005
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 1 / 26

Outline
1 Introduction
2 Results for Distributed MPCModelsCommunicationCooperation
3 Conclusions
4 Future Directions
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 2 / 26

Introduction
Increase reliability of critical infrastructures
Typically consist of networks of interconnected/interacting subsystemsChemical plants, electrical power grids, water distribution networks, etc.
R
x ipaR
Trim Cooler
Ext
ract
orFlash
F
xF
SyS
Bx ipaB
Fw
xFs
Make up CO2
Subsystem 1
TS
Tsh
StrippingColumn
Subsystem 2
Subsystem 3
Reboiler
x ipaD
L
V
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 3 / 26

Introduction
Increase reliability of critical infrastructures
Typically consist of networks of interconnected/interacting subsystemsChemical plants, electrical power grids, water distribution networks, etc.
CONTROL AREA 2 CONTROL AREA 3
P23tie
CONTROL AREA 1CONTROL AREA 4
P34tie
P12tie
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 3 / 26

Introduction
Increase reliability of critical infrastructures
Typically consist of networks of interconnected/interacting subsystemsChemical plants, electrical power grids, water distribution networks, etc.
Reach 8
Gate 1
4 km 4 km 3 km 2 km 2 km
Reach 1
Gate 8
Q1
3 km3 km7 km
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 3 / 26

Introduction
Traditional approach: decentralized control
Wealth of literature from the 1970’s on improved decentralized controlWell known that poor performance may result if the interconnectionsare not negligible
Steady increase in available computational power has provided theopportunity for centralized control
Most practitioners view centralized control of large, networkedsystems as impractical and unrealistic
Centralized control law grows exponentially with system sizeDifficult to tailor a centralized controller to meet operational objectives
A divide and conquer strategy is essential for control of large,networked systems (Ho [2005])
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 4 / 26

Introduction
Integrating subsystem-based MPCs
1990’s: linear MPC became a dominant advanced control technology
Notion of Nash equilibrium and Pareto optimality in multi-agentgames (Basar and Olsder [1999])
Potential benefits and requirements of cross-integration within theMPC framework (Kulhavy et al. [2001], Havlena and Lu [2005])
Available distributed MPC formulations in the literature(Camponogara et al. [2002], Jia and Krogh [2002], Keviczky et al.[2004])
Nominal properties (feasibility, optimality, closed-loop stability) havenot all been established for any single distributed MPC framework
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 5 / 26

Modeling for Distributed MPCDecentralized, interaction models
xii(k + 1) = Aiixii(k) + Biiui(k)
Decentralized Model
(Aii, Bii, Cii)
yi(k)ui(k)
xii(k + 1) = Aiixii(k) + Biiui(k)
Decentralized Model
(Aii, Bii, Cii)
(local subsystem inputs)
Interaction Model
xij(k + 1) = Aijxij(k) + Bijuj(k)
(Aij, Bij, Cij)
yi(k) =∑
j Cijxij(k)
uj 6=i(k)
(external subsystem inputs)
+ +
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 6 / 26

Modeling for Distributed MPCDecentralized, interaction models
xii(k + 1) = Aiixii(k) + Biiui(k)
Decentralized Model
(Aii, Bii, Cii)
yi(k)ui(k)
xii(k + 1) = Aiixii(k) + Biiui(k)
Decentralized Model
(Aii, Bii, Cii)
(local subsystem inputs)
Interaction Model
xij(k + 1) = Aijxij(k) + Bijuj(k)
(Aij, Bij, Cij)
yi(k) =∑
j Cijxij(k)
uj 6=i(k)
(external subsystem inputs)
+ +
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 6 / 26

Distributed MPCFormulations and Assumptions
Formulations for distributed MPC
Communication-based MPC
Cooperation-based MPC
Assumptions
All MPC cost functions are positive definite, quadratic
Each subsystem represented by a linear, state-space model
All interaction models are stable
Local input inequality constraints (e.g., input bounds)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 7 / 26

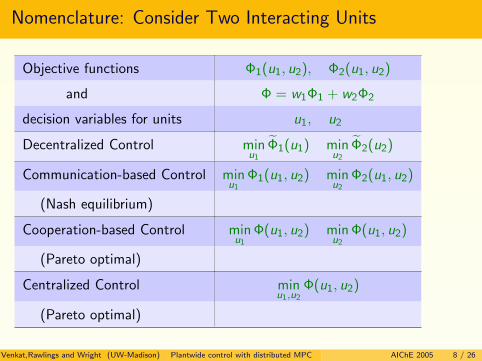
Nomenclature: Consider Two Interacting Units
Objective functions Φ1(u1, u2), Φ2(u1, u2)
and Φ = w1Φ1 + w2Φ2
decision variables for units u1, u2
Decentralized Control minu1
Φ1(u1) minu2
Φ2(u2)
Communication-based Control minu1
Φ1(u1, u2) minu2
Φ2(u1, u2)
(Nash equilibrium)
Cooperation-based Control minu1
Φ(u1, u2) minu2
Φ(u1, u2)
(Pareto optimal)
Centralized Control minu1,u2
Φ(u1, u2)
(Pareto optimal)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 8 / 26

Nomenclature: Consider Two Interacting Units
Objective functions Φ1(u1, u2), Φ2(u1, u2)
and Φ = w1Φ1 + w2Φ2
decision variables for units u1, u2
Decentralized Control minu1
Φ1(u1) minu2
Φ2(u2)
Communication-based Control minu1
Φ1(u1, u2) minu2
Φ2(u1, u2)
(Nash equilibrium)
Cooperation-based Control minu1
Φ(u1, u2) minu2
Φ(u1, u2)
(Pareto optimal)
Centralized Control minu1,u2
Φ(u1, u2)
(Pareto optimal)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 8 / 26

Nomenclature: Consider Two Interacting Units
Objective functions Φ1(u1, u2), Φ2(u1, u2)
and Φ = w1Φ1 + w2Φ2
decision variables for units u1, u2
Decentralized Control minu1
Φ1(u1) minu2
Φ2(u2)
Communication-based Control minu1
Φ1(u1, u2) minu2
Φ2(u1, u2)
(Nash equilibrium)
Cooperation-based Control minu1
Φ(u1, u2) minu2
Φ(u1, u2)
(Pareto optimal)
Centralized Control minu1,u2
Φ(u1, u2)
(Pareto optimal)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 8 / 26

Nomenclature: Consider Two Interacting Units
Objective functions Φ1(u1, u2), Φ2(u1, u2)
and Φ = w1Φ1 + w2Φ2
decision variables for units u1, u2
Decentralized Control minu1
Φ1(u1) minu2
Φ2(u2)
Communication-based Control minu1
Φ1(u1, u2) minu2
Φ2(u1, u2)
(Nash equilibrium)
Cooperation-based Control minu1
Φ(u1, u2) minu2
Φ(u1, u2)
(Pareto optimal)
Centralized Control minu1,u2
Φ(u1, u2)
(Pareto optimal)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 8 / 26
Nomenclature: Consider Two Interacting Units
Objective functions Φ1(u1, u2), Φ2(u1, u2)
and Φ = w1Φ1 + w2Φ2
decision variables for units u1, u2
Decentralized Control minu1
Φ1(u1) minu2
Φ2(u2)
Communication-based Control minu1
Φ1(u1, u2) minu2
Φ2(u1, u2)
(Nash equilibrium)
Cooperation-based Control minu1
Φ(u1, u2) minu2
Φ(u1, u2)
(Pareto optimal)
Centralized Control minu1,u2
Φ(u1, u2)
(Pareto optimal)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 8 / 26

Communication-based MPC1
Exchange of state and inputtrajectory informationbetween MPCsSubsystems’ MPCoptimizations solved untilstate and input trajectoriesconvergeFirst move in each convergedinput trajectory injected intothe plant
MPC 1 Prediction MPC 2 Prediction
Prediction horizonPrediction horizon
Process-process interactions
State trajectorySetpoint trajectory
Process
MPC 1 MPC 2
Process
u1
Controlled input trajectory
y2
u2
y1
1 2
1Similar schemes proposed by Jia and Krogh [2001], Camponogara et al. [2002]Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 9 / 26

Communication-based MPC1
Exchange of state and inputtrajectory informationbetween MPCsSubsystems’ MPCoptimizations solved untilstate and input trajectoriesconvergeFirst move in each convergedinput trajectory injected intothe plant
MPC 1 Prediction MPC 2 Prediction
Prediction horizonPrediction horizon
Process-process interactions
State trajectorySetpoint trajectory
Process
MPC 1 MPC 2
Process
u1
Controlled input trajectory
y2
u2
y1
1 2
1Similar schemes proposed by Jia and Krogh [2001], Camponogara et al. [2002]Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 9 / 26

Geometry of Communication-based MPCStable Nash Equilibrium
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
u1
u2
Φ2(u)
Φ1(u)
b
a
pd 0
1
2
3
n
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 10 / 26

Geometry of Communication-based MPCNash Equilibrium does not exist
-2
-1
0
1
2
3
4
5
-3 -2 -1 0 1 2 3 4 5
u1
u2
Φ2(u)
Φ1(u)
b
ap
d0
1
2
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 11 / 26

Communication-based MPC
Distillation column of Ogunnaike and Ray [1994]
Outputs T21,T7; Inputs L,VTwo SISO MPCsIntentionally choose bad pairing:
MPC-1 : T21 − VMPC-2 : T7 − L
Stable Nash Equilibrium exists butcommunication-based MPC isunstable
An unreliable plantwide control strategy
-1.25
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0 50 100 150 200Time (sec)
T21
setpointcent-MPC
comm-MPC
-1.5
-1
-0.5
0
0.5
1
1.5
0 50 100 150 200Time (sec)
V
cent-MPCcomm-MPC
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 12 / 26

Communication-based MPC
Distillation column of Ogunnaike and Ray [1994]
Outputs T21,T7; Inputs L,VTwo SISO MPCsIntentionally choose bad pairing:
MPC-1 : T21 − VMPC-2 : T7 − L
Stable Nash Equilibrium exists butcommunication-based MPC isunstable
An unreliable plantwide control strategy
-1.25
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0 50 100 150 200Time (sec)
T21
setpointcent-MPC
comm-MPC
-1.5
-1
-0.5
0
0.5
1
1.5
0 50 100 150 200Time (sec)
V
cent-MPCcomm-MPC
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 12 / 26

Feasible Cooperation-based MPC (FC-MPC)
Tasks involved
Model interconnections between subsystemsExchange input trajectories among interconnected subsystems’ MPCsReplace local objectives by a suitable global objective e.g.,
Φ =∑
i
wiΦi wi > 0,
M∑i=1
wi = 1
Eliminate the state variables using the model equality constraints
Each MPC solves an optimization problem in the local input variables
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 13 / 26

Feasible Cooperation-based MPC (FC-MPC)
Properties
1 All iterates are plantwide feasible2 The sequence of cost functions is a non-increasing function of the
iteration number
Also bounded below, hence convergent
3 The sequence of iterates converges to an optimal limit point(centralized MPC solution)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 14 / 26

Geometry of Feasible Cooperation-based MPC
-2
-1
0
1
2
3
4
5
-3 -2 -1 0 1 2 3 4 5
u1
u2
Φ2(u)
Φ1(u)
b
ap
d0
1
2
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 15 / 26

Geometry of Feasible Cooperation-based MPC
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3 -2 -1 0 1 2
u1
u2
Φ2(u)
Φ1(u)
b
ap
d0
1
2
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 15 / 26

Closed-loop Properties of FC-MPC with State Estimation
Distributed MPC control law
Subsystem states (decentralized+interaction) estimated using asteady-state Kalman filter
First input move in the last calculated input trajectory of eachsubsystem’s FC-MPC injected into the plant
Properties
Nominal closed-loop stability under intermediate termination
Disturbance scenarios that destabilize FC-MPC also destabilizecentralized MPC
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 16 / 26

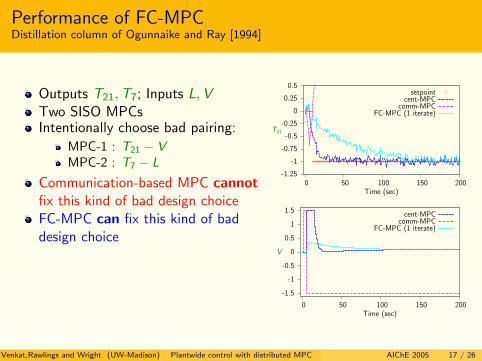
Performance of FC-MPCDistillation column of Ogunnaike and Ray [1994]
Outputs T21,T7; Inputs L,VTwo SISO MPCsIntentionally choose bad pairing:
MPC-1 : T21 − VMPC-2 : T7 − L
Communication-based MPC cannotfix this kind of bad design choice
FC-MPC can fix this kind of baddesign choice
-1.25
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0 50 100 150 200Time (sec)
T21
setpointcent-MPC
comm-MPC
-1.5
-1
-0.5
0
0.5
1
1.5
0 50 100 150 200Time (sec)
V
cent-MPCcomm-MPC
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 17 / 26
Performance of FC-MPCDistillation column of Ogunnaike and Ray [1994]
Outputs T21,T7; Inputs L,VTwo SISO MPCsIntentionally choose bad pairing:
MPC-1 : T21 − VMPC-2 : T7 − L
Communication-based MPC cannotfix this kind of bad design choiceFC-MPC can fix this kind of baddesign choice
-1.25
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0 50 100 150 200Time (sec)
T21
setpointcent-MPC
comm-MPCFC-MPC (1 iterate)
-1.5
-1
-0.5
0
0.5
1
1.5
0 50 100 150 200Time (sec)
V
cent-MPCcomm-MPC
FC-MPC (1 iterate)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 17 / 26

Integrated Styrene Polymerization Plants
Plant 1
End use grade fraction: (1− β)
V
L D
B
Frecy, Cmr, Tr
Fm1, cm1
, T1
Plant 2
Fs0, cs, Tf0
Fc2, Tc2
Fs2, cs2
, Tf2
Fm2, cm2
, Tf2
Fc0, Tc0
Cp, Cmbot, Cinitbot
Finit2, ci2, Tf2
Finit0, ci0, Tf0
Fm0, cm0
, Tf0
Fm3, cm3
, T2
Two MPCs, one for each plant
Plant 1:
Manipulate Finit0 to controlT1
Produces grade A (lowergrade) of polymer
Plant 2:
Two units–polymerizationreactor and separatorMPC manipulates Finit2 ,Frecy and V to control T2,Cmr and Cp
Produces grade B (highergrade) of polymer
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 18 / 26

Integrated Styrene Polymerization PlantsPerformance of different MPC frameworks
-10
-8
-6
-4
-2
0
0 10 20 30 40 50 60Time (hrs)
T1
setpointCentralized MPC
Decentralized MPC
-8
-7
-6
-5
-4
-3
-2
-1
0
0 10 20 30 40 50 60Time (hrs)
T2
setpointCentralized MPC
Decentralized MPC
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0 10 20 30 40 50 60Time (hrs)
Finit0
Centralized MPCDecentralized MPC
-0.1
0
0.1
0.2
0.3
0.4
0.5
0 10 20 30 40 50 60Time (hrs)
Finit2
Centralized MPCDecentralized MPC
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 19 / 26

Integrated Styrene Polymerization PlantsPerformance of different MPC frameworks
-10
-8
-6
-4
-2
0
0 10 20 30 40 50 60Time (hrs)
T1
setpointCentralized MPC
Decentralized MPCFC-MPC (1 iterate)
-8
-7
-6
-5
-4
-3
-2
-1
0
0 10 20 30 40 50 60Time (hrs)
T2
setpointCentralized MPC
Decentralized MPCFC-MPC (1 iterate)
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0 10 20 30 40 50 60Time (hrs)
Finit0
Centralized MPCDecentralized MPCFC-MPC (1 iterate)
-0.1
0
0.1
0.2
0.3
0.4
0.5
0 10 20 30 40 50 60Time (hrs)
Finit2
Centralized MPCDecentralized MPCFC-MPC (1 iterate)
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 19 / 26
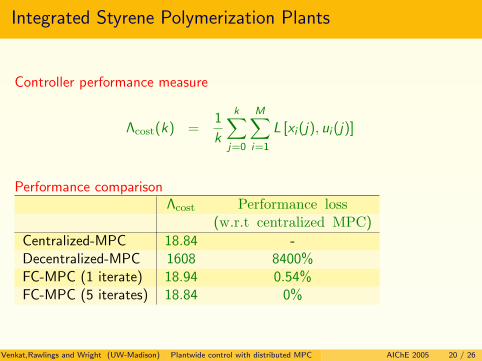
Integrated Styrene Polymerization Plants
Controller performance measure
Λcost(k) =1
k
k∑j=0
M∑i=1
L [xi (j), ui (j)]
Performance comparisonΛcost Performance loss
(w.r.t centralized MPC)
Centralized-MPC 18.84 -Decentralized-MPC 1608 8400%FC-MPC (1 iterate) 18.94 0.54%FC-MPC (5 iterates) 18.84 0%
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 20 / 26

Conclusions
In this talk, we have shown some first results on
sharing information and combining objectives in multiple MPCs.a distributed MPC methodology with guaranteed feasibility, stability,and optimality properties.
Wealth of unexplored issues and approaches remain.
Large potential for societal impact.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 21 / 26

Conclusions
In this talk, we have shown some first results on
sharing information and combining objectives in multiple MPCs.a distributed MPC methodology with guaranteed feasibility, stability,and optimality properties.
Wealth of unexplored issues and approaches remain.
Large potential for societal impact.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 21 / 26

Conclusions
In this talk, we have shown some first results on
sharing information and combining objectives in multiple MPCs.a distributed MPC methodology with guaranteed feasibility, stability,and optimality properties.
Wealth of unexplored issues and approaches remain.
Large potential for societal impact.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 21 / 26
Future Directions
Develop methods for identification of significant interactions fromclosed-loop data (minimal modeling).Develop methods to reduce the information sharing betweensubsystems’ MPCs.Develop strategies that update and adapt the models when the plantchanges.Extend these ideas to nonlinear models.Test and implement the approach on industrial applications.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 22 / 26

Future Directions
Develop methods for identification of significant interactions fromclosed-loop data (minimal modeling).Develop methods to reduce the information sharing betweensubsystems’ MPCs.Develop strategies that update and adapt the models when the plantchanges.Extend these ideas to nonlinear models.Test and implement the approach on industrial applications.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 22 / 26

Future Directions
Develop methods for identification of significant interactions fromclosed-loop data (minimal modeling).Develop methods to reduce the information sharing betweensubsystems’ MPCs.Develop strategies that update and adapt the models when the plantchanges.Extend these ideas to nonlinear models.Test and implement the approach on industrial applications.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 22 / 26

Future Directions
Develop methods for identification of significant interactions fromclosed-loop data (minimal modeling).Develop methods to reduce the information sharing betweensubsystems’ MPCs.Develop strategies that update and adapt the models when the plantchanges.Extend these ideas to nonlinear models.Test and implement the approach on industrial applications.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 22 / 26

Future Directions
Develop methods for identification of significant interactions fromclosed-loop data (minimal modeling).Develop methods to reduce the information sharing betweensubsystems’ MPCs.Develop strategies that update and adapt the models when the plantchanges.Extend these ideas to nonlinear models.Test and implement the approach on industrial applications.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 22 / 26

Further Reading I
J. Antwerp and R. Braatz. Model predictive control of large scale processes. J. Proc.Control, 10:1–8, 2000.
T. Basar and G. J. Olsder. Dynamic Noncooperative Game Theory. SIAM, Philadelphia,1999.
R. Bartlett, L. Biegler, J. Backstrom, and V. Gopal. Quadratic programming algorithmsfor large-scale model predictive control. J. Proc. Cont., 12(7):775–795, 2002.
A. Bemporad, M. Morari, V. Dua, and E. Pistikopoulos. The explicit linear quadraticregulator for constrained systems. Automatica, 38(1):3–20, 2002.
E. Camponogara, D. Jia, B. H. Krogh, and S. Talukdar. Distributed model predictivecontrol. IEEE Ctl. Sys. Mag., pages 44–52, February 2002.
J. E. Cohen. Cooperation and self interest: Pareto-inefficiency of Nash equilibria in finiterandom games. Proc. Natl. Acad. Sci. USA, 95:9724–9731, 1998.
V. Havlena and J. Lu. A distributed automation framework for plant-wide control,optimisation, scheduling and planning. In Proceedings of the 16th IFAC WorldCongress, Prague, Czech Republic, July 2005.
Y.-C. Ho. On Centralized Optimal Control. IEEE Trans. Auto. Cont., 50(4):537–538,2005.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 23 / 26

Further Reading II
D. Jia and B. H. Krogh. Distributed model predictive control. In Proceedings of theAmerican Control Conference, Arlington, Virginia, June 2001.
D. Jia and B. H. Krogh. Min-max feedback model predictive control for distributedcontrol with communication. In Proceedings of the American Control Conference,Anchorage,Alaska, May 2002.
T. Keviczky, F. Borelli, and G. J. Balas. A study on decentralized receding horizoncontrol for decoupled systems. In Proceedings of the American Control Conference,Boston, Massachusetts, July 2004.
R. Kulhavy, J. Lu, and T. Samad. Emerging technologies for enterprise optimization inthe process industries. In J. B. Rawlings, B. A. Ogunnaike, and J. W. Eaton, editors,Chemical Process Control–VI: Sixth International Conference on Chemical ProcessControl, pages 352–363, Tucson, Arizona, January 2001. AIChE Symposium Series,Volume 98, Number 326.
S. Li and T. Basar. Distributed algorithms for the computation of noncooperativeequilibria. Automatica, 23(4):523–533, 1987.
J. Lu. Challenging control problems and emerging technologies in enterpriseoptimization. Control Eng. Prac., 11(8):847–858, August 2003.
J. Lunze. Feedback Control of Large Scale Systems. Prentice-Hall, London, U.K, 1992.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 24 / 26

Further Reading III
D. Q. Mayne, J. B. Rawlings, C. V. Rao, and P. O. M. Scokaert. Constrained modelpredictive control: Stability and optimality. Automatica, 36(6):789–814, 2000.
M. Morari and J. H. Lee. Model predictive control: past, present and future. InProceedings of joint 6th international symposium on process systems engineering(PSE ’97) and 30th European symposium on computer aided process systemsengineering (ESCAPE 7), Trondheim, Norway, 1997.
B. A. Ogunnaike and W. H. Ray. Process Dynamics, Modeling, and Control. OxfordUniversity Press, New York, 1994.
S. J. Qin and T. A. Badgwell. A survey of industrial model predictive controltechnology. Control Eng. Prac., 11(7):733–764, 2003.
J. B. Rawlings and K. R. Muske. Stability of constrained receding horizon control. IEEETrans. Auto. Cont., 38(10):1512–1516, October 1993.
N. R. Sandell-Jr., P. Varaiya, M. Athans, and M. Safonov. Survey of decentralizedcontrol methods for larger scale systems. IEEE Trans. Auto. Cont., 23(2):108–128,1978.
D. Siljak. Decentralized Control of Complex Systems. Academic Press, London, 1991.
M. Sznaier and M. J. Damborg. Heuristically enhanced feedback control of constraineddiscrete-time linear systems. Automatica, 26(3):521–532, 1990.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 25 / 26

Further Reading IV
R. E. Young, R. D. Bartusiak, and R. W. Fontaine. Evolution of an industrial nonlinearmodel predictive controller. In J. B. Rawlings, B. A. Ogunnaike, and J. W. Eaton,editors, Chemical Process Control–VI: Sixth International Conference on ChemicalProcess Control, pages 342–351, Tucson, Arizona, January 2001. AIChE SymposiumSeries, Volume 98, Number 326.
Venkat,Rawlings and Wright (UW-Madison) Plantwide control with distributed MPC AIChE 2005 26 / 26