a new method for generating initial condition ...cas.nuist.edu.cn/teacherfiles/file/20150916/... ·...
TRANSCRIPT

A New Method for Generating Initial Condition Perturbations in a Regional EnsemblePrediction System: Blending
YONG WANG,* MARTIN BELLUS,1 JEAN-FRANCOIS GELEYN,# XULIN MA,@ WEIHONG TIAN,& AND
FLORIAN WEIDLE*
* Department of Forecasting Models, Central Institute for Meteorology and Geodynamics, Vienna, Austria1NWP Division, Slovak Hydro-meteorological Institute, Bratislava, Slovakia
#CNRM, M�et�eo-France, Toulouse, France@College of Atmospheric Science, Nanjing University of Information Science and Technology, Nanjing, China
&NMC, China Meteorological Administration, Beijing, China
(Manuscript received 18 December 2012, in final form 9 January 2014)
ABSTRACT
A blending method for generating initial condition (IC) perturbations in a regional ensemble prediction
system is proposed. The blending is to combine the large-scale IC perturbations from a global ensemble
prediction system (EPS) with the small-scale IC perturbations from a regional EPS by using a digital filter and
the spectral analysis technique. The IC perturbations generated by blending can well represent both large-
scale and small-scale uncertainties in the analysis, and aremore consistent with the lateral boundary condition
(LBC) perturbations provided by global EPS. The blending method is implemented in the regional ensemble
system Aire Limit�ee Adaptation Dynamique D�eveloppement International-Limited Area Ensemble Fore-
casting (ALADIN-LAEF), in which the large-scale IC perturbations are provided by the European Centre
for Medium-Range Weather Forecasts (ECMWF-EPS), and the small-scale IC perturbations are gener-
ated by breeding in ALADIN-LAEF. Blending is compared with dynamical downscaling and breeding
over a 2-month period in summer 2007. The comparison clearly shows impact on the growth of forecast
spread if the regional IC perturbations are not consistent with the perturbations coming through LBC
provided by the global EPS. Blending can cure the problem largely, and it performs better than dynamical
downscaling and breeding.
1. Introduction
Ensemble prediction techniques have been applied in
most numerical weather prediction (NWP) centers as
a dynamicalwayof accounting for the forecast uncertainty.
The optimal design of an ensemble prediction system
(EPS) strongly depends on the quantification of uncer-
tainties due to errors in initial conditions (ICs), model
formulation, and physical parameterizations. Additional
challenges posed for a skillful regional EPS include, for
example, the problem of quantifying the uncertainties due
to errors in lateral boundary conditions (LBC).
The construction of the IC perturbation is crucial for
a skillful EPS. Previous work has shown significant
short-range forecast uncertainties on mesoscale and in
local detail (Zhang et al. 2002; McMurdie and Mass
2004; Bowler et al. 2008). The representation of those
mesoscale uncertainties in a regional EPS is particularly
important for forecasting high-impact weather, quanti-
tative precipitation prediction, low cloud and visibility,
wind gusts, etc. For perturbing IC in a regional EPS,
there are at least three key requirements:
d The IC perturbations should be effective immediately
from the initial time; this means that analysis errors
should be quantified in the IC perturbations.d The spatial scale of the IC perturbations should be in
accordance with the scales of variability resolved by
the mesoscale regional model.d The IC perturbations should be consistent with the
perturbation coming through the lateral boundary.
Various approaches are designed for dealing with IC
uncertainties related with the forecast in regional EPS.
The dynamical downscaling (Grimit and Mass 2002;
Frogner et al. 2006; Bowler et al. 2008; Marsigli et al.
Corresponding author address: Yong Wang, Department of Fore-
casting Models, Zentralanstalt f€ur Meteorologie und Geodynamik,
Hohe Warte 38, A-1190 Vienna, Austria.
E-mail: [email protected]
MAY 2014 WANG ET AL . 2043
DOI: 10.1175/MWR-D-12-00354.1
� 2014 American Meteorological Society

2008; Li et al. 2008; Iversen et al. 2011), in which the IC
perturbations of regionalEPS are obtainedby interpolating
the IC perturbations of the global EPS providing the LBC
perturbations, is themost popularway for simulating the IC
uncertainties. This is because of its simplicity and good
performance. The dynamical downscaling is a priori in-
capable of meeting the second key requirement, because
the regional small-scale uncertainties cannot be explicitly
simulatedwith dynamical downscaling, which is usually just
following the governance of the global ensemble that is
driving it.
An alternative is the breeding technique (Toth and
Kalnay 1993).When applied to a regional EPS, it creates
the perturbations including, in principle, all scales re-
solved by the mesoscale regional model, and takes at
least partly the analysis uncertainties into account.
There are two other improved versions of breeding: the
ensemble transform (ET; Bishop and Toth 1999; Wei
et al. 2008) and the ensemble transform Kalman filter
(ETKF; Bishop et al. 2001; Wang and Bishop 2003). ET
and ETKF are more optimal at sampling the analysis
uncertainties than the original breeding approach be-
cause they take account of the distribution of assimilated
observations.
In most regional EPSs the LBC perturbations are
obtained by the forecast from a global EPS. There is
a concern that because of different perturbation treat-
ment in regional EPS and its global driving EPS, the
regional IC perturbations might conflict with perturba-
tions coming from the LBC (Warner et al. 1997; Bowler
and Mylne 2009). It is unclear if an ill-posed setup like
that would be superior to the dynamical downscaling
global EPS.
For example it is very likely, that a regional ensemble
using regional breeding IC perturbations coupled to
a global EPS using singular vector (SV) perturbations
(Buizza and Palmer 1995), would lead to introducing
instability or leading to spurious gravity waves at the
lateral boundaries (C. Bishop 2007, personal commu-
nication). This is probably because SV perturbations in
particular have no continuity cycle to cycle. The bred
perturbations that develop in response to one set of
singular vectors are then attached to an unrelated set of
singular vectors on the next cycle. By contrast, if the
global ensemble used an ensemble Kalman filter
(EnKF), ensemble data assimilation (EDA), or breed-
ing method, there would be some continuity between
the LBCs for two successive cycles of the same member,
and thus less mismatch between the bred perturbations
that evolved in response to the LBCs from the previous
cycle and the LBCs for the new cycle.
To beware of the risk mentioned above, the National
Centers for Environmental Prediction (NCEP) has
successfully implemented breeding in the short-range
ensemble prediction system (SREP; Hamill and Colucci
1997; Stensrud et al. 2000; Du and Tracton 2001; Du
et al. 2003) for IC perturbations, while the ensemble of
LBCs required for SREP is obtained from the global ET
ensemble (Wei et al. 2008). Bishop et al. (2009) tested
ET for generating high-resolution initial perturbations
for regional ensemble forecast and theLBCperturbations
are provided by a global ET ensemble. Bowler andMylne
(2009) introduced ETKF in the regional component of
the Met Office Global and Regional EPS (MOGREPS;
Bowler et al. 2008) and it couples with the global ETKF
ensemble of the MORGREPS global component.
At Zentral Anstalt f€ur Meteorologie und Geodynamik
(ZAMG), the regional EPS Aire Limit�ee Adaptation
DynamiqueD�eveloppement International-Limited Area
Ensemble Forecasting (ALADIN-LAEF; Wang et al.
2010, 2011) has been developed for the purpose of pro-
viding a reliable short-range probabilistic forecast to the
national weather service of ALADIN-Limited Area
modeling for Central Europe (LACE) partners; and to
allow the probabilistic information be propagated into
downstreammodels, for example, of hydrology and energy
industry.
For ALADIN-LAEF the natural choice for the
LBC perturbations are those from European Centre
for Medium-Range Weather Forecasts (ECMWF-EPS)
forecasts. This is not only because of the similarity in
model physics in the ECMWF Integrated Forecast System
(IFS) and ALADIN, but also because of the quality of
ECMWF-EPS forecasts and their operational availability
at ZAMG.
The IC perturbations for ECMWF-EPS are generated
using SV technique. This is an appropriate method for
medium-range forecasting, but it is still unclear whether
it is appropriate for use in regional EPS. Research on
regional SVs is in a very early stage (Stappers and
Barkmeijer 2011); the design of SVs is surely not optimal
for a short-range ensemble, which has to quantify the
uncertainties in the analysis. Furthermore, the SV
technique is computationally expensive.
In ALADIN-LAEF we employ the breeding tech-
nique, as it is simple, inexpensive, and has been success-
fully applied at NCEP (Du et al. 2003). To deal with the
aforementioned inconsistency problem of coupling with
ECMWF-EPS, a blending idea for generating regional IC
perturbations has been implemented inALADIN-LAEF.
The idea is to use the ALADIN blending technique
(Giard 2001; Bro�zkov�a et al. 2001, 2006; Derkova and
Bellus 2007) to combine the large-scale uncertainties
provided by ECMWF-EPS with the small-scale un-
certainties generated by breeding with ALADIN model.
The ALADIN blending technique is a spectrally based
2044 MONTHLY WEATHER REV IEW VOLUME 142

digital filter. The blended perturbations should have the
large-scale perturbations from ECMWF-EPS, and the
small-scale part from ALADIN breeding.
We believe that the new perturbations meet the three
key requirements for regional IC perturbations. Through
ALADIN breeding the perturbations provided by blend-
ing attempt to estimate the errors in the initial analysis
based on the past information about the flow. On the large
scale, the IC perturbations are now consistent with the
LBC perturbations, with both of them being based on the
ECMWF-EPS perturbations. The small-scale uncertainty
in the analysis is more detailed and accurate due to the
higher resolution of ALADIN, and it is more in balance
with the orographic and surface forcing used in the re-
gional model. This should be a better representation of
reality than interpolated large-scale perturbations from
the global EPS.
A similar blending scheme was proposed by Caron
(2013). He uses a scale-selective ETKF in the context of
a convective-scale ensemble, including different possi-
ble truncation scales and a demonstration of the impact
of inconsistent LBCs.
In this study, we give a detailed description of the
blending method for generating IC perturbations in
ALADIN-LAEF, and document the performance of
blending compared with breeding and dynamical
downscaling. Here, we also investigate the impact of the
inconsistent coupling of ALADIN breeding IC pertur-
bations with ECMWF-EPS LBC perturbations.
Section 2 introduces the blending method. Section 3
describes the ALADIN-LAEF configuration, breeding,
and experimental setup. Section 4 evaluates the results
of a 2-month comparison between blending, dynamical
downscaling and breeding. A case study is also inves-
tigated in section 4. A summary and conclusions follow
in section 5.
2. The blending method
The idea of blending is to obtain a new perturbed
initial state by combining large-scale features of global
ensemble ICs with small-scale features provided by re-
gional ensemble ICs. The underlying hypothesis is that
the information on small-scale uncertainties is more
reliably represented by the regional ensemble than by
the global ensemble, since the small scales are not re-
solved in the global ensemble.
The blending method is a spectral technique using
standard nonrecursive low-pass Dolph–Chebyshev dig-
ital filter (Giard 2001; Bro�zkov�a et al. 2001). The
blending procedure is schematically and graphically il-
lustrated in Fig. 1. It consists of several consecutive
steps: 1) interpolating model fields of global ensemble
ICs on the spectral resolution of the regional ensemble;
2) mapping fields from the spectral resolution of the re-
gional ensemble to a lower spectral resolution, blending
truncation, which is predefined by the blending ratio;
3) applying a digital filter to both perturbed ICs of
global ensemble and regional ensemble on the original
grid of the regional model but at the blending trunca-
tion; 4) remapping the fields from blending trunca-
tion to the original spectral resolution of the regional
ensemble after digital filtering; and 5) computing the
difference between those filtered fields, which represents
a large-scale increment. This increment contains almost
pure low-frequency perturbation information, and is then
added to the original high-frequency signal of the per-
turbed high-resolution regional ensemble ICs. The com-
bination (blending) of both spectra is performed in a
spectral transition zone, which is implicitly defined by the
use of an incremental digital filter initialization technique
(Lynch et al. 1997). The detailed description of blending
is given mathematically in below.
Following the idea byMachenhauer andHaugen (1987)
and considering perturbed variable G from the global
ensemble, and R from the regional ensemble, bothG and
R being valid at the resolution of the regional model, their
full harmonic Fourier expansions are given by
G(x)5 �M
m52M
Gme2ip(mx/L
x) and
R(x)5 �M
m52MRme
2ip(mx/Lx) , (1)
FIG. 1. Schematic description of spectral blending.
MAY 2014 WANG ET AL . 2045

where M is the maximum wavenumber and Lx is the
horizontal domain length in the x direction. Let J be the
number of grid points of the whole regional domain
along the x direction, the inverse truncated Fourier
transform; that is, the spectral coefficients Gm and Rm
are obtained by
Gm 51
J�J21
j50
G( j)e22ip(jm/J) and
Rm 51
J�J21
j50
R( j)e22ip(jm/J) . (2)
Similar equations are applied in the y direction. As we
mentioned above, blending is applied on full gridpoint
resolution of the regional ensemble but with a lower
spectral resolution (we call it the blending truncation),
which represents the scale resolved by IC perturbations
of the global ensemble. When changing the spectral
truncation from the original resolution to the blending
spectral resolution, for both perturbed variables from
the global and the regional ensemble, but being valid at
the blending spectral resolution, denoted as GLB and
RLB, their full harmonic Fourier expansions are given by
GLB(x)5 �M
L
m52ML
GLOWm e2ip(mx/L
x) and
RLB(x)5 �M
L
m52ML
RLOWm e2ip(mx/L
x) , (3)
whereML is the maximum wavenumber of the blending
spectral truncation. The inverse truncated Fourier
transform (i.e., the spectral coefficients GLOWm and
RLOWm ) are obtained by
GLOWm 5
1
J�J21
j50
GLB( j)e22ip(jm/J) and
RLOWm 5
1
J�J21
j50
RLB( j)e22ip(jm/J) . (4)
The blending spectral truncation is determined by the
resolution of the global ensemble, the resolution of ini-
tial perturbations of the global ensemble, and the reso-
lution of the regional ensemble. The estimation of the
blending spectral truncation (number of equivalent
waves resolved around a great circle of the earth) TcutR
may be obtained as follows:
TcutR 5
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiTa2G 3T
fR
3
qand Ta
G 5ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiTfG 3T
pG
q, (5)
where TaG is defined as a geometric mean of spectral
resolution of the global ensemble TfG and of spectral
resolution of its IC perturbations TpG. Here T
fR is the
global equivalent of the spectral truncation of the re-
gional ensemble (i.e., it would be with the regional
model full resolution and corresponding grid extended
to the whole earth). Equation (5) is a compromise which
was found useful since it considers also a merge of scales
in order to estimate the true informative scales of global
IC perturbation. Of course, the choice of the geo-
metrical mean is somewhat arbitrary, but it proved quite
robust in tests. Indeed many experiments were con-
ducted to choose the optimum weighting of TaG and T
fR
and the solution proposed in this paper was clearly the
best one.
The maximum wavenumber of the blending spectral
truncation is then calculated by
ML 5M/(TfR/T
cutR ) . (6)
The blending ratioTfR/T
cutR is chosen larger than the ratio
between the average resolution of the global model over
the regional domain and the resolution of the regional
model, and smaller than the corresponding ratio be-
tween the scale of IC perturbations of the global and the
regional ensembles. The computation of the blending
ratio used in this study is given in section 3’s system and
experiment description.
The design of blending involves the definition of
a transition zone between the large scales provided by
the global ensemble and the small scales to be kept from
the regional ensemble, and an algorithm to combine
those fields in this transition zone. The transition zone
can be understood as an interval of frequencies roughly
bounded by the blending spectral truncation TcutR rather
than a specified single cutoff frequency. Within this
zone, the new blended state transforms smoothly from
the state of the global ensemble to the state of the re-
gional ensemble. Such smooth transition of the spectra
has better properties because the fields are not changed
by ‘‘jumps’’ but continuously.
The scale selection in the blending is implicitly de-
termined by employing an incremental digital filter ini-
tialization (DFI) technique, which was originally used
for the initialization of meteorological fields in NWP
(Lynch and Huang 1992; Lynch et al. 1997). A digital
filter is applied on both global and regional IC pertur-
bations on the grid of regional model but at the blending
spectral truncation. This is to separate the large-scale
part of the spectra containing the information provided
by global ensemble IC perturbations performed within
the higher-resolution framework of the regional ensem-
ble. The difference between the filtered fields provides
2046 MONTHLY WEATHER REV IEW VOLUME 142

a blending large-scale increment (Giard 2001), which is
then added on the original regional model spectra of the
regional ensemble. The choice of the filter determines the
implicit blending interval and weights. Hence, the blend-
ing spectral truncation is not used here to simply cut off
part of signal. It is used to define the transition zonewhere
the spectral coefficients are progressively damped by the
digital filter. The smooth transition between the spectra
also means that the method is not very sensitive to the
exact choice of the blending spectral truncation, provided
that the spectral transition is sufficiently wide in the DFI.
The DFI uses the digital filter applied to time series of
the model variables generated by short-range adiabatic
backward and diabatic forward integrations from the
initial time in order to ensure the appropriate state of
balance between the mass and wind initial fields (Lynch
and Huang 1992; Lynch et al. 1997).
For any model state GLOWm and RLOW
m , denoted in the
following as fn, known at the time step n f f2N, . . . , f21, f0,
f1, . . . , fNg, it may be regarded as the Fourier coefficients
of a function F(u):
F(u)5 �n5N
n52N
fn3 e2inu , (7)
where u is the digital frequency. The filtering of f could
be conducted by multiplying F(u) by a function H(u):
H(u)5
�1 if juj# uc0 if juj$ uc
, (8)
where uc is the cutoff frequency. Let f Ln denote the low-
frequency part of fn, clearly
H(u)3F(u)5 �n5N
n52N
fLn e2inu (9)
and
f Ln 5 �k5N
k52N
(H3F)k fn2k 5 �k5N
k52N
hk fn2k , (10)
where hk 5 h2k are filter weights defined by Dolph–
Chebyshev polynomials. We apply
H(u)5 h0 1 2 �N
k51
hk cos(kuDt) (11)
in the DFI, where Dt is the time step and 2N 1 1 is the
order of the filter. The detailed description of DFI can
be found in Lynch and Huang (1992) and in Lynch et al.
(1997). Since the ‘‘ideal low-pass’’ filter can produce
unpleasant oscillations in the stop band and also some
damping in the pass band (the attenuation of amplitudes
of the long waves), the weights of low-pass filter are
usually modulated by a ‘‘window.’’ This trick can sig-
nificantly reduce the Gibbs oscillations in the stop band
and at the same time minimizes waves dumping in the
pass band, too (Lynch et al. 1997).
Although DFI is by definition a time filter, it acts like
a space filter as well. It is because of the fact that in me-
teorology, where a wave’s propagation speed is limited,
high frequencies are usually associated with horizontally
short waves. As a consequence, the properties of the DFI
can be used besides its original purpose—the data ini-
tialization, also for the scale selection in the spectral
blending by digital filter technique (Derkov�a and Bellu�s
2007). One could apply a cheap low-pass filter directly in
space as inCaron (2013), as it was tried inALADIN some
years ago. But the disadvantage of such a direct blending
is an unknown degree of balance between the spectral
fields, and a very delicate choice of both transition zone
and the weights (Giard 2001). An advantage of DFI
blending is that it could provide a slight local adaptation
to atmospheric conditions through spectral mapping and
remapping. In case of rapidly changing situations (in
principle mostly linked to smaller scales) more confi-
dence will be given to the regional ICs, which is suppos-
edly more accurate than the interpolated global ICs.
The solution of the model, integrated from 2tN to tN,
is weighted averaged:
f L(0)5 �N
n52N
hnfn , (12)
so that at the end of the DFI a balanced initial state is
achieved. Supposing that the results of DFI on GLOWm
and RLOWm are Gm*
LOW and Rm*LOW, respectively, we ob-
tain the large-scale part of the perturbed ICs of global
and regional model by
GLSP(x)5 �M
m52M
Gm*LOWe2ip(mx/L
x) and
RLSP(x)5 �M
m52M
Rm*LOWe2ip(mx/L
x) . (13)
The symbolic equation of blending can be summarized after
Bro�zkov�a et al. (2006) and Derkova and Bellus (2007):
ICblend 5 R2RLSP|fflfflfflfflfflffl{zfflfflfflfflfflffl}regional small scale
1 GLSP|fflffl{zfflffl}global large scale
,
(14)
MAY 2014 WANG ET AL . 2047
where ICblend denotes initial condition after blending.
After blending, the field itself keeps the large scale from
global IC perturbations, and the small scale from re-
gional ensemble IC perturbations with a smooth and
fully model compatible transition between them both.
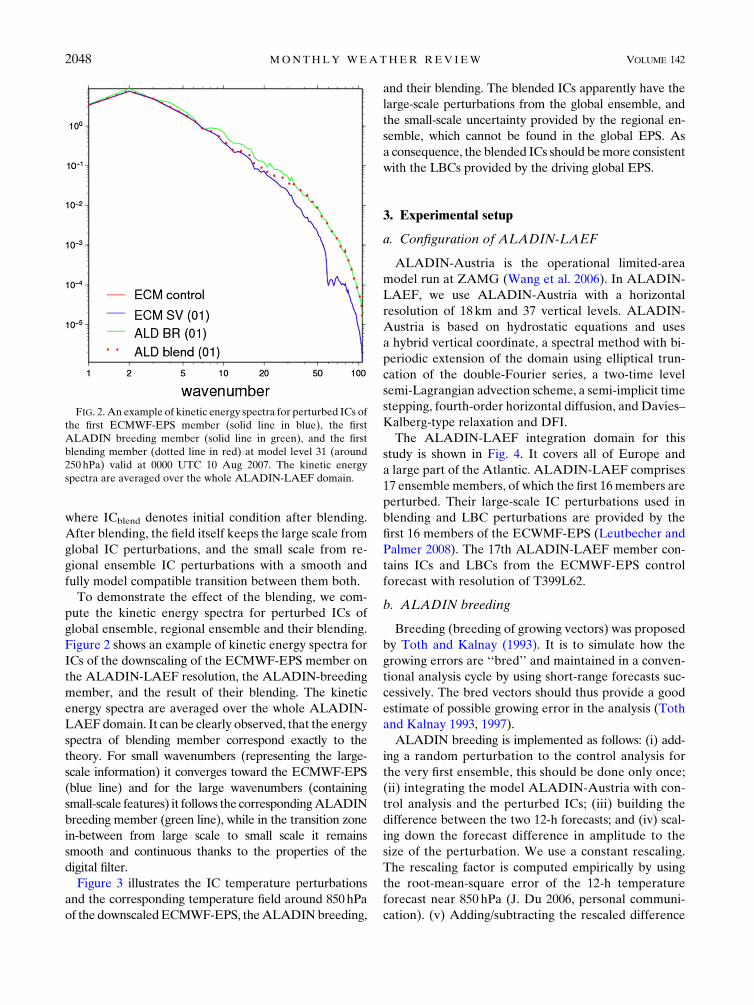
To demonstrate the effect of the blending, we com-
pute the kinetic energy spectra for perturbed ICs of
global ensemble, regional ensemble and their blending.
Figure 2 shows an example of kinetic energy spectra for
ICs of the downscaling of the ECMWF-EPS member on
the ALADIN-LAEF resolution, the ALADIN-breeding
member, and the result of their blending. The kinetic
energy spectra are averaged over the whole ALADIN-
LAEFdomain. It can be clearly observed, that the energy
spectra of blending member correspond exactly to the
theory. For small wavenumbers (representing the large-
scale information) it converges toward the ECMWF-EPS
(blue line) and for the large wavenumbers (containing
small-scale features) it follows the correspondingALADIN
breeding member (green line), while in the transition zone
in-between from large scale to small scale it remains
smooth and continuous thanks to the properties of the
digital filter.
Figure 3 illustrates the IC temperature perturbations
and the corresponding temperature field around 850hPa
of the downscaledECMWF-EPS, theALADINbreeding,
and their blending. The blended ICs apparently have the
large-scale perturbations from the global ensemble, and
the small-scale uncertainty provided by the regional en-
semble, which cannot be found in the global EPS. As
a consequence, the blended ICs should bemore consistent
with the LBCs provided by the driving global EPS.
3. Experimental setup
a. Configuration of ALADIN-LAEF
ALADIN-Austria is the operational limited-area
model run at ZAMG (Wang et al. 2006). In ALADIN-
LAEF, we use ALADIN-Austria with a horizontal
resolution of 18 km and 37 vertical levels. ALADIN-
Austria is based on hydrostatic equations and uses
a hybrid vertical coordinate, a spectral method with bi-
periodic extension of the domain using elliptical trun-
cation of the double-Fourier series, a two-time level
semi-Lagrangian advection scheme, a semi-implicit time
stepping, fourth-order horizontal diffusion, and Davies–
Kalberg-type relaxation and DFI.
The ALADIN-LAEF integration domain for this
study is shown in Fig. 4. It covers all of Europe and
a large part of the Atlantic. ALADIN-LAEF comprises
17 ensemble members, of which the first 16 members are
perturbed. Their large-scale IC perturbations used in
blending and LBC perturbations are provided by the
first 16 members of the ECWMF-EPS (Leutbecher and
Palmer 2008). The 17th ALADIN-LAEF member con-
tains ICs and LBCs from the ECMWF-EPS control
forecast with resolution of T399L62.
b. ALADIN breeding
Breeding (breeding of growing vectors) was proposed
by Toth and Kalnay (1993). It is to simulate how the
growing errors are ‘‘bred’’ and maintained in a conven-
tional analysis cycle by using short-range forecasts suc-
cessively. The bred vectors should thus provide a good
estimate of possible growing error in the analysis (Toth
and Kalnay 1993, 1997).
ALADIN breeding is implemented as follows: (i) add-
ing a random perturbation to the control analysis for
the very first ensemble, this should be done only once;
(ii) integrating the model ALADIN-Austria with con-
trol analysis and the perturbed ICs; (iii) building the
difference between the two 12-h forecasts; and (iv) scal-
ing down the forecast difference in amplitude to the
size of the perturbation. We use a constant rescaling.
The rescaling factor is computed empirically by using
the root-mean-square error of the 12-h temperature
forecast near 850 hPa (J. Du 2006, personal communi-
cation). (v) Adding/subtracting the rescaled difference
FIG. 2. An example of kinetic energy spectra for perturbed ICs of
the first ECMWF-EPS member (solid line in blue), the first
ALADIN breeding member (solid line in green), and the first
blending member (dotted line in red) at model level 31 (around
250 hPa) valid at 0000 UTC 10 Aug 2007. The kinetic energy
spectra are averaged over the whole ALADIN-LAEF domain.
2048 MONTHLY WEATHER REV IEW VOLUME 142

to the new control analysis. The perturbed ICs are
generated in sets of positive and negative pairs around
the control analysis. Steps (ii) to (v) are then repeated,
and the perturbations are bred to grow along the fore-
cast trajectory. After a few cycles, the breeding vector
structure should be statistically independent of the very
first arbitrary perturbations (Magnusson et al. 2008). In
ALADIN breeding, wind components, temperature,
moisture, and surface pressure are perturbed at each
level and model grid point.
c. Experiments
To evaluate the blending, comparisons with dy-
namical downscaling of ECMWF-EPS and ALADIN
breeding have been conducted. In Table 1 the setup of
the comparison is described. In the experiment, we did
not apply any other perturbations, for example, the land
surface perturbation and the multiphysics for the model
perturbation in ALADIN-LAEF. This makes possible to
have a clean comparison between blending, dynamical
downscaling and breeding.
In our experiments, the resolution of ECMWF-EPS is
TL399L62 (spectral triangular T399 with 62 vertical
levels, corresponding to 50-km resolution). Initial con-
ditions are perturbed using a combination of initial time
and evolved singular vectors (Buizza and Palmer 1995)
computed at T42L62 resolution, with a 48-h optimiza-
tion time interval and a total-energy norm. Singular
vectors are computed to maximize the final-time norm
over different areas (Barkmeuer et al. 1999), then
FIG. 3. (left) IC perturbations of temperature at about 850 hPa and (right) the corresponding temperature fields.
(top) ALADIN breeding, (middle) downscaling of ECMWF-EPS, and (bottom) blending of ECMWF-EPS and
ALADIN-breeding. Valid at 0000 UTC 10 Aug 2007.
MAY 2014 WANG ET AL . 2049

combined and scaled to have an initial amplitude
comparable to an estimate of the analysis error. Model
uncertainties due to physical parameterizations are
simulated using a stochastic scheme (Buizza et al.
1999). The ensemble control analysis is obtained by
interpolating the TL799L91 analysis to the ensemble
TL399L62 resolution.
For all those three experiments, the LBC perturba-
tions are provided by ECMWF-EPS forecasts in a 6-h
interval.
The blending implementation in this study is prac-
tically a breeding-blending cycle. Based upon the
ALADIN-LAEF 12-h forecasts, ALADIN breeding is
used to generate the IC perturbations, which are then
blended with the corresponding 16 perturbed ICs of
ECMWF-EPS. The new blended IC perturbations for
each of the 16 ALADIN-LAEF members are used as
ICs for the ALADIN-LAEF forecast; the ALADIN-
LAEF 12-h forecasts are employed for the next
breeding-blending cycle. In short, the blending system
takes its small scales from a separate breeding cycle
based on the ALADIN-LAEF 12-h forecasts started
with the blended IC perturbations.
In our implementation of blending, the spectral res-
olution of ECMWF ensemble TfG is equal to 399; and
the spectral resolution of its IC perturbations (i.e.,
the resolution of ECMWF SV TpG 5 42); the ECMWF
equivalent spectral resolution for ALADIN-LAEF TfR
is L/(3 3 18 km) 5 741, where L 5 40 000 km is the
Earth’s perimeter and 3 represents the denominator for
ALADIN-LAEF quadratic grid. Therefore, the blending
spectral truncation is computed as
TaG 5
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiTfG 3T
pG
qffi 129; Tcut
R 5ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiTa2G 3T
fR
3
qffi 231,
and the blending ratioTfR/T
cutR is about 3.2. InALADIN-
LAEF the original spectral resolution, the maximum
zonal and meridional wavenumbers are 107 and 74,
the corresponding blending spectral truncation imple-
mented in this study are then 33 and 23, respectively. In
the implementation of DFI, we used the standard
Dolph–Chebyshev filter. The DFI is applied by in-
tegrating ALADIN backward adiabatically and forward
diabatically. The time span of the filter is 4 h with eight
integration time steps in each direction.
4. Results
In this study the ALADIN-LAEF runs with blend-
ing, breeding, and dynamical downscaling have been
initialized at 0000 UTC and integrated to 54 h for
a 2-month period (15 June–20 August 2007). The fore-
casts of upper-air weather variables were verified against
ECMWF analysis, and both analysis and forecast are
interpolated to a common regular 0.158 3 0.158 latitude–longitude grid. Verification of the forecasts of surface
weather variables were performed against the surface
observations at the observation location. Forecast values
are interpolated to the observation site for smoothly
varying fields, such as 2-m temperature and 10-m wind
speed. For precipitation, which has strong spatial gradi-
ents, the observation is matched to the nearest grid point.
The verification is performed for a limited area of the
forecast domain over central Europe, as shown in Fig. 4.
There are 1219 synop stations in the verification domain
being used in this study.
A set of standard ensemble and probabilistic forecast
verification scores is applied to evaluate the perfor-
mance of the ALADIN-LAEF experiments. The scores
considered are ensemble spread, root-mean-square er-
ror (RMSE) of ensemble mean, continuous ranked
FIG. 4. ALADIN-LAEF domain and model topography. The
inner limited-area domain in red depicts the verification domain,
which covers all of central Europe.
TABLE 1. Description of experiments ‘‘downscaling,’’ ‘‘breed-
ing,’’ and ‘‘blending’’ used to evaluate the blending method.
ALADIN-LAEF is configured with initial perturbations generated
by using downscaling, breeding, and blending. The same lateral
boundary perturbations from the ECMWF-EPS forecast and the
same land surface analysis from ECMWF-EPS control are ap-
plied in those experiments. No multiphysics are in use in the
experiments.
Expt
Initial condition
perturbations
Lateral boundary
condition
perturbations
Downscaling Downscaling of
ECMWF-EPS
ECMWF-EPS forecast
Breeding ALADIN-breeding ECMWF-EPS forecast
Blending Blending ECMWF-EPS
with ALADIN-breeding
ECMWF-EPS forecast
2050 MONTHLY WEATHER REV IEW VOLUME 142
probability score (CRPS), and outlier statistics. Those
verification scores measure the quality of probabilistic
forecasts of scalar quantities. A detailed description of
those verification scores can be found in Hamill and
Colucci (1997), Mason (1982), Jolliffe and Stephenson
(2003), Stanski et al. (1989), and Wilks (2006).
In this study, we focus on verification of the most con-
cerned variables in regional EPS: 2-m temperature (T2m),
10-m wind speed (W10m), 12-h accumulated rainfall
(PREC), and three representative upper-air variables:
temperature at 850hPa (T850), wind speed at 850hPa
(V850), and relative humidity at 850hPa (RH850).
a. Ensemble mean RMSE and spread
RMSE of the ensemble mean describes the de-
terministic skill of the ensemble and gives good mea-
sures of overall forecast performance. The ensemble
spread is the standard deviation of the ensemble mem-
bers with respect to its mean. It reflects the diversity of
the ensemble forecast. The RMSE should basically
match the spread if the ensemble is correctly predicting
the distribution of potential outcomes.
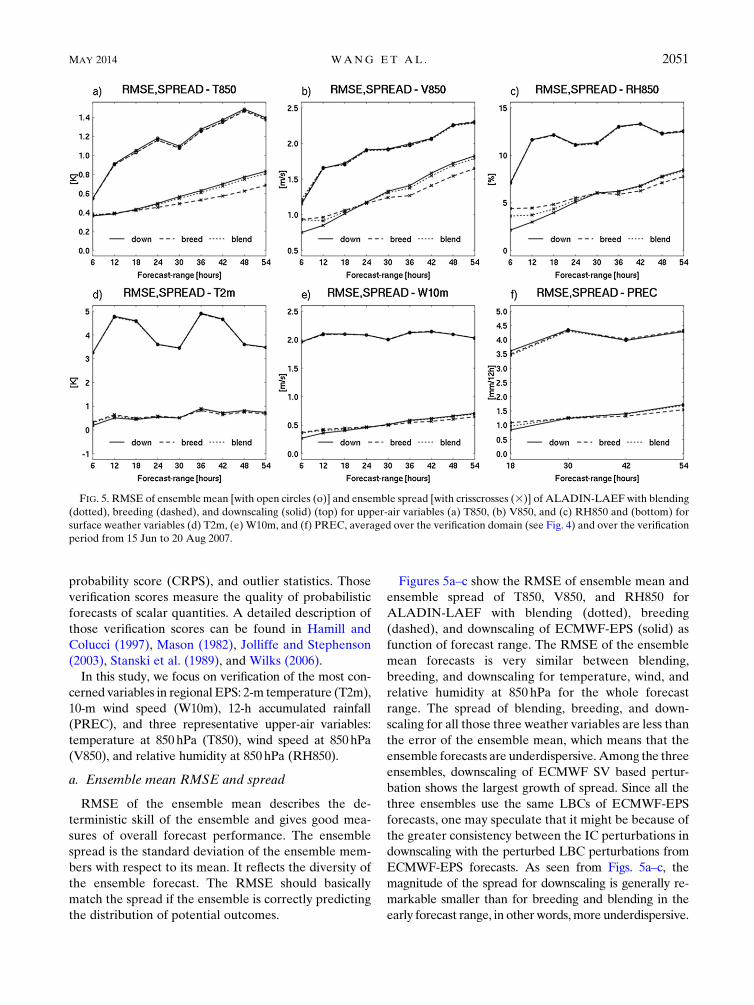
Figures 5a–c show the RMSE of ensemble mean and
ensemble spread of T850, V850, and RH850 for
ALADIN-LAEF with blending (dotted), breeding
(dashed), and downscaling of ECMWF-EPS (solid) as
function of forecast range. The RMSE of the ensemble
mean forecasts is very similar between blending,
breeding, and downscaling for temperature, wind, and
relative humidity at 850 hPa for the whole forecast
range. The spread of blending, breeding, and down-
scaling for all those three weather variables are less than
the error of the ensemble mean, which means that the
ensemble forecasts are underdispersive.Among the three
ensembles, downscaling of ECMWF SV based pertur-
bation shows the largest growth of spread. Since all the
three ensembles use the same LBCs of ECMWF-EPS
forecasts, one may speculate that it might be because of
the greater consistency between the IC perturbations in
downscaling with the perturbed LBC perturbations from
ECMWF-EPS forecasts. As seen from Figs. 5a–c, the
magnitude of the spread for downscaling is generally re-
markable smaller than for breeding and blending in the
early forecast range, in otherwords,more underdispersive.
FIG. 5. RMSE of ensemble mean [with open circles (o)] and ensemble spread [with crisscrosses (3)] of ALADIN-LAEF with blending
(dotted), breeding (dashed), and downscaling (solid) (top) for upper-air variables (a) T850, (b) V850, and (c) RH850 and (bottom) for
surface weather variables (d) T2m, (e) W10m, and (f) PREC, averaged over the verification domain (see Fig. 4) and over the verification
period from 15 Jun to 20 Aug 2007.
MAY 2014 WANG ET AL . 2051

Very probably this is related to the lack of small scales in
the downscaled ECMWF initial perturbations.
The spread for breeding performs similar to blending
and downscaling in the early forecast range (up to 18 h)
for T850, but in the later forecast range the spread for
breeding grows clearly slower than for blending and
downscaling, in which the spread of blending and
downscaling keeps growing almost equally. For V850
and RH850 breeding has much larger spread than
downscaling up to 24–30 forecast hours. In the later
forecast range the spread of breeding grows slower and
becomes smaller than downscaling and blending.
As expected, blending has the best overall perfor-
mance. It takes the advantage of breeding and down-
scaling. In the early forecast range, the spread for
blending is similar (T850 and V850) or very closed
(RH850) to breeding, which is considerably better than
downscaling. This competitive performance of blending
shows the dominated effect of breeding in the blending
perturbation. During the later forecast range the spread
of blending keeps increasing rapidly as the downscaling,
which is superior to breeding. This might explain that
the blending of large-scale uncertainty from its driving
global model in regional IC perturbations makes it more
consistent with the LBC perturbations coming from the
driving global EPS.
The performance of blending, breeding, and down-
scaling for the surface weather variables has been also
compared in Figs. 5d–f, which show the RMSE of the
ensemble mean and the ensemble spread of T2m,
W10m, and PREC for ALADIN-LAEF with blending,
breeding, and downscaling. The RMSE of blending,
breeding, and downscaling performs very similar for
T2m andW10m; a slightly better RMSE of blending and
breeding than downscaling can be observed for PREC in
the early forecast hours (up to 30 h), then they reach the
RMSE of downscaling and give the same result in the
late forecast hours (30–54 h).
Like the upper-air variables, the spread of all the
surface weather variables, T2m, W10m, and PREC for
blending, breeding, and downscaling are remarkably
underdispersive. The positive impact of blending can
also be seen in the growth of ensemble spread for the
surface variables. Blending is close to breeding, which
performs better than downscaling in the first 24 forecast
hours. In the late forecast period downscaling is supe-
rior; this could be due to the matched IC perturba-
tions of downscaling with the LBC perturbations from
ECMWF-EPS forecasts. Blending is similar to down-
scaling, as it has the same large-scale perturbations as in
downscaling, which are more consistent with the LBC
perturbations from ECMWF-EPS forecasts. Breeding
has a larger spread in the early forecast range, but the
growth of spread is slower than blending and down-
scaling.
b. Outlier statistics
The measure of the statistical reliability discussed in
this subsection is the percentage of outliers. This is the
statistic of the number of cases when the verifying
analysis at any grid point lies outside the whole ensem-
ble. A more reliable EPS should have a score closer to
2/(nens 1 1), where nens is the ensemble size.
Figures 6a–c give the outlier statistics for the forecasts
of temperature, wind speed, and relative humidity at
850 hPa for blending, breeding, and downscaling; while
Figs. 6d–f show the outlier statistics for the forecasts of 2-m
temperature, 10-m wind speed, and 12-h accumulated
precipitation.
The benefit of using blending can be found in the
outlier statistics for both upper-air and surface weather
variables. For T850 and V850 in Figs. 6a and 6b, blending
gets the best reliability in terms of outlier statistics. Su-
perior results for blending can be found for W10m and
PREC in Figs. 6d and 6f. Blending is close to breeding for
RH850 in Fig. 6c and for T2m in Fig. 6d at a short lead
time, they have less outliers than downscaling; and it
turns too close to downscaling at the later time, and they
have less outliers than breeding.
The result of outlier statistics and the result of the
ensemble spread in Fig. 5 are consistent with each other
for blending, breeding, and downscaling.
c. The continuous ranked probability score
The CRPS is an overall measure of the skill of
a probabilistic forecast, measuring the skill of the en-
semble mean forecast as well as the ability of the per-
turbations to capture the deviations around it (Bowler
and Mylne 2009). CRPS is the generalized form of the
discrete ranked probability score, simulating the mean
over all possible thresholds. As noted by Hersbach
(2000), CRPS is analogous to an integrated form of the
Brier score, which can be decomposed into reliability,
resolution, and uncertainty. The CRPS orientates neg-
atively, so smaller values are better; and it rewards
concentration of probability around the step function
located at the observed value. A perfect CRPS score is
zero, as with the Brier score (Wilks 2006).
Figure 7 shows CRPSs of upper-air variables T850,
V850, and RH850 for blending, breeding, and down-
scaling; and of surface variables T2m,W10m, and PREC,
respectively. The statistical significant tests for CRPS are
computed by using the bootstrap method (Wilks 2006).
The 95% and 5% confidence intervals for the three ex-
periments and all the verifying upper-air and surface
variables are also shown in Fig. 7. The differences in the
2052 MONTHLY WEATHER REV IEW VOLUME 142

skill score are statistically not significant, but noticeable.
CRPS score supports the findingswith spread and outliers
in the previous subsections. The blending has the best
performance, while breeding is better only at the short
lead time.
d. A case study
The impact of blending is evaluated by using several
standard statistical scores over a 2-month period in the
last subsections. To better understand the blending
method and its outperformance over the downscaling
and the regional breeding, a case study is investigated.
Figure 8 shows the time evolution of ensemble spread
of T850 of ALADIN-LAEF with the blending, the
breeding and the downscaling from initial time to 48-h
forecasts in a 12-h interval. The ensemble spread was
calculated on each grid over the whole ALADIN-LAEF
domain. It is a widely used measure to describe the
perturbation in the ensemble forecast. The blending has
more local small-scale information than downscaling at
initial time as expected; these scales cannot be properly
resolved by the downscaling. The ensemble spread of
blending has a similar distribution to the breeding, but
is smaller. The blending spread grows faster than the
breeding and becomes close to downscaling in the later
forecast range. The larger spread in the breeding at
initial time keeps the same magnitude and does not
grow during the forecast hours. It is noted that the local
small-scale perturbation in the blending and the
breeding decays after 12 forecast hours. The difference
of perturbations in the blending and the breeding at the
large scale keeps visible in the earlier and later forecast
range. These results are consistent with the result of
the 2 months of statistical scores discussed previously.
The ensemble spread of surface pressure has been
also investigated. They show the similar results (not
shown).
Figure 9 shows the time evolution of kinetic energy
spectra for perturbed ICs and forecasts of theALADIN-
LAEF member with downscaling, breeding, and blend-
ing at around 700 hPa. The kinetic energy spectra are
averaged over the whole ALADIN-LAEF domain.
Such a spectral analysis at different lead times for this
selected case can help us to understand ‘‘how’’ different
FIG. 6. Percentage of outliers of ALADIN-LAEF with blending (dotted), breeding (dashed), and downscaling (solid) (top) for upper-
air variables (a) T850, (b) V850, and (c) RH850 and (bottom) for surface weather variables (d) T2m, (e) W10m, and (f) PREC. The
verification domain and period are as in Fig. 5. The constant line in gray is the expected ideal percentage of outliers.
MAY 2014 WANG ET AL . 2053

perturbations evolve with time and, therefore, help to
explain their forecast skills.
The effect of the blending is obviously at the initial
time and in the earlier forecast range. After 12–18-h
forecasts the kinetic energy spectra of blending, breed-
ing, and downscaling at the small scale get closer to each
other. The spectra of the blending remains the same as
downscaling, while the spectra of the breeding differs
from the blending and downscaling at large scale clearly
in the earlier forecast range, and still keeps visible in the
later forecast range. This confirms the results discussed
before.
5. Summary and conclusions
In this paper a new blending method for generating
IC perturbations in regional EPS has been proposed
and described. Blending combines the large-scale IC
perturbations from the global EPS with the small-scale
IC perturbations from the regional EPS by using
the digital filter and spectral analysis techniques. The
blending method is implemented in ALADIN-LAEF,
in which the large-scale IC perturbations are provided by
ECMWF-EPS, and the small-scale IC perturbations are
generated by breeding in ALADIN-LAEF. Ensemble
forecasts with blending are compared with ensembles
with regional breeding and dynamical downscaling of
ECMWF-EPS. Results are evaluated by using some
standard verification scores over central Europe and for
a 2-month summer period in 2007. A case study is also
conducted to have an in-depth analysis of the results. We
verified the surface weather variables: 2-m temperature,
10-mwind, and 12-h accumulated rainfall; and the upper-
air weather variables: wind, temperature, and relative
humidity at 850 hPa.
The IC perturbations generated by blending imple-
mented in ALADIN-LAEF can provide a better esti-
mate of the actual errors in the initial analysis based on
the past information about the flow through breeding.
The small-scale uncertainty in the analysis is more de-
tailed and accurate due to the higher resolution of
ALADIN, and it is more in balance with the orographic
FIG. 7. Comparison of (top) CRPSs of upper-air variables (a) T850, (b) V850, and (c) RH850 and (bottom) surface weather variables
(d) T2m, (e) W10m, and (f) PREC between ALADIN-LAEF with blending (dotted), breeding (dashed), and downscaling (solid). The
verification domain and period are as in Fig. 5. The faint lines of solid, dashed, and dotted show the 95% and 5% confidence intervals of
downscaling, breeding, and blending experiments, respectively.
2054 MONTHLY WEATHER REV IEW VOLUME 142

FIG. 8. Ensemble spread of T850 of ALADIN-LAEF with blending (blend), breeding
(breed), and downscaling (down) from initial time to 48-h forecasts in a 12-h interval. The
forecast started at 1200 UTC 23 May 2011.
MAY 2014 WANG ET AL . 2055

and surface forcing that is used in the regional model.
This is a better representation of reality than the in-
terpolated large-scale perturbations from the global
model, for example, through dynamical downscaling,
since these scales are not resolved in the global model.
On the large scale, the regional IC perturbations gen-
erated by blending are the uncertainties from ECMWF-
EPS, which can better sample the large-scale feature
FIG. 9. Kinetic energy spectra for perturbed ICs and forecasts of first member of
ALADIN-LAEF with downscaling (down, solid line in blue), breeding (breed, solid line
in green), and blending (blend, dashed line in red) at model level 20 (around 700 hPa).
The kinetic energy spectra are averaged over the whole ALADIN-LAEF domain. The
forecast started at 1200 UTC 23 May 2011.
2056 MONTHLY WEATHER REV IEW VOLUME 142

because of its global geographical extent. As the LBC
perturbations are provided by ECMWF-EPS forecasts,
the IC perturbations of blending on the larger scale are
now consistent with the LBC perturbations.
Those features in the IC perturbations of blending
have been confirmed by the experiments presented in
this study, and it leads to the conclusion that blending
has the best overall performance in comparison with
breeding and downscaling.
The RMSE of the ensemble mean for blending,
breeding, and downscaling is very close to each other.
All three ensembles are underdispersive; their spread is
less than the errors of their ensemble mean, this is even
more evident for the surface variables. One may spec-
ulate that the strong underdispersion for the surface
weather variables may be due to lack of the perturba-
tions in the model physics and land surface conditions. It
should be also noted that the little spread might be due
to some extent to observation error (including the error
of representativeness, which may be particularly large
for station observations of surface variables) rather than
a deficiency in the ensemble (Saetra et al. 2004).
Downscaling underperforms at the short lead time.
The ensemble spread, statistical reliability, and the skill
score of CRPS for downscaling is noticeable inferior to
breeding and blending. Very probably this is related to
the lack of small scales in the downscaled ECMWF
initial perturbations. Downscaling of ECMWF SV-
based perturbation shows the largest growth rate of
spread among the three ensembles, and in the later
forecast period (after 24 h roughly) performs well, which
is comparable to blending. The relative rapid growth of
spread for downscaling might correspond to the greater
consistency between the IC perturbations in downscaling
with the LBC perturbations from the ECMWF-EPS
forecast, since all three ensembles use the same per-
turbed LBCs from ECMWF-EPS forecasts.
Breeding is superior during the first 24 forecast hours,
it has larger spread, which is better matched RMSE, has
fewer outliers, and slightly higher skill. A plausible ex-
planation for less underdispersion of breeding at the
short lead time may be due to the more detailed small-
scale IC perturbations generated by the regionalALADIN
breeding. In the later forecast range the spread of breeding
grows slower and becomes smaller than downscaling and
blending. This would be speculated to be due to the mis-
match between the IC perturbations generated by breed-
ingwith the large-scale forcing throughLBCperturbations
from ECMWF-EPS forecasts, and/or the properties of
breeding method itself (Wang and Bishop 2003). How-
ever, more in-depth studies are needed to verify if it is
really true or not. This is left to be our future research to
better understand the mechanism of blending.
One would expect that breeding performs better than
the downscaling, since it is attempting to simulate the
errors in the regional forecast. This would be true for the
short lead times since the IC perturbations are impor-
tant in this period; as the influence of the IC perturba-
tions decrease with increasing leading time, the impact
of the mismatch between IC and LBC perturbations be-
comes more dominant. This would suggest that regional
ensemble is best if it considers not only the uncertainties
in the regional analysis, but also the consistency between
the IC and LBC perturbations.
Blending has the best overall performance. In the
early forecast hours, blending is similar or much closer
to breeding, which is considerably better than down-
scaling. This competitive performance of blending shows
that the blending perturbations, like breeding, contain
more detail on the small scale than downscaling, which
persists to 24 h roughly. During the later forecast range
the spread of blending keeps increase rapidly as the
downscaling, which is superior to breeding. This is due to
the impact of the LBC perturbations. Blending has the
same large-scale perturbations as in downscaling, which
are consistent with the LBC perturbations.
As expected from the design of the blending method,
blending ensures that the scale of the IC perturbations
matches the scale resolved by the regional model, and
ensures that the IC perturbations match the LBC per-
turbations. It makes it possible that blending has the best
overall performance.
The case study confirms the results from the 2-month
averaged verification. It helps to better comprehend
how the blending works. The time evolution of the en-
semble spread and the kinetic energy spectra of the
blending, breeding, and downscaling prove that the ef-
fect of the blending is at the initial time and in the earlier
forecast range. The blending becomes close to the
downscaling at all the scales with the time, while the
breeding differs from the blending and downscaling at
the large scale clearly in the earlier forecast range, and
keeps visible in the later forecast range.
It has been noted that there are some issues that are
not investigated in this study, for example, what signal in
IC perturbations generated by breeding and downscal-
ing is good for the error growth in the ensemble, why
does the mismatch between IC and LBC cause the
slower growth rate of spread in the ensemble in the later
forecast hours, and what is the effect of spinup process
on IC perturbations for blending, breeding, and down-
scaling? These questions will be addressed in future
studies to better understand the mechanism of the
blending.
Furthermore, we are going to apply the blending idea
in convection-allowing ensembles. For such an ensemble,
MAY 2014 WANG ET AL . 2057

it would need to have its own initial perturbations, which
represent the uncertainties in the corresponding reso-
lution. Further, because the model domain of such an
ensemble is usually rather small, the possible impact of
the LBC perturbations and the mismatch between IC
and LBC perturbations might bemore significant. These
possibilities will be investigated in the future, too.
Acknowledgments. We gratefully acknowledge Domi-
nique Giard, Radmila Brozkova, and Dijana Klaric who
have contributed to the ALADIN spectral blending.
Special thanks to Jun Du, Craig Bishop, Xuguang Wang,
and Zoltan Toth for valuable discussions during the
ALADIN-LAEF implementation. ECMWF has pro-
vided the computer facilities and technical help imple-
menting ALADIN-LAEF on the ECMWF HPCF. The
work has been partly funded by RC LACE and €OAD
(Austrian Agency for International Cooperation in Ed-
ucation and Research, Project CN 13/2010).
REFERENCES
Barkmeuer, J., R. Buizza, and T. N. Palmer, 1999: 3D-Var Hessian
singular vectors and their potential use in the ECMWF en-
semble prediction system. Quart. J. Roy. Meteor. Soc., 125,
2333–2351, doi:10.1002/qj.49712555818.
Bishop, C. H., and Z. Toth, 1999: Ensemble transformation and
adaptive observations. J. Atmos. Sci., 56, 1748–1765, doi:10.1175/
1520-0469(1999)056,1748:ETAAO.2.0.CO;2.
——, B. Etherton, and S. Majumdar, 2001: Adaptive sampling
with ensemble transform Kalman filter. Part I: Theoretical
aspects. Mon. Wea. Rev., 129, 420–436, doi:10.1175/
1520-0493(2001)129,0420:ASWTET.2.0.CO;2.
——, T. R. Holt, J. Nachamkin, S. Chen, J. G. McLay, J. D. Doyle,
andW. T. Thompson, 2009: Regional ensemble forecasts using
the ensemble transform technique.Mon. Wea. Rev., 137, 288–
298, doi:10.1175/2008MWR2559.1.
Bowler, N. E., and K. R. Mylne, 2009: Ensemble transform Kalman
filter perturbation for a regional ensemble prediction system.
Quart. J. Roy. Meteor. Soc., 135, 757–766, doi:10.1002/qj.404.——, A. Arribas, K. R. Mylne, K. B. Robertson, and S. E. Beare,
2008: TheMOGREPS short-range ensemble prediction system.
Quart. J. Roy. Meteor. Soc., 134, 703–722, doi:10.1002/qj.234.
Bro�zkov�a, R., and Coauthors, 2001: DFI blending, an alternative
tool for preparation of the initial conditions for LAM. PWRP
Rep. 31 (CAS/JSC WGNE Rep.), WMO-TD-1064, 1–7.
——, M. Derkova, M. Bellus, and F. Farda, 2006: Atmospheric
forcing by ALADIN/MFSTEP and MFSTEP oriented tun-
ings. Ocean Sci., 2, 113–121, doi:10.5194/os-2-113-2006.
Buizza, R., and T. Palmer, 1995: The singular vector structure of the
atmospheric general circulation. J. Atmos. Sci., 52, 1434–1456,
doi:10.1175/1520-0469(1995)052,1434:TSVSOT.2.0.CO;2.
——,M. Miller, and T. N. Palmer, 1999: Stochastic representation of
model uncertainties in the ECMWF Ensemble Prediction Sys-
tem. Quart. J. Roy. Meteor. Soc., 125, 2887–2908, doi:10.1002/
qj.49712556006.
Caron, J. F., 2013: Mismatching perturbations at the lateral bound-
aries in limited-area ensemble forecasting: A case study. Mon.
Wea. Rev., 141, 356–374, doi:10.1175/MWR-D-12-00051.1.
Derkov�a, M., and M. Bellu�s, 2007: Various applications of the
blending by digital filter technique in ALADIN numerical
weather prediction system. Meteor. J. SHMU, 10, 27–36.Du, J., and M. S. Tracton, 2001: Implementation of a real-time
short-range ensemble forecasting system at NCEP: An
update. Preprints, Ninth Conf. on Mesoscale Processes,
Ft. Lauderdale, FL, Amer. Meteor. Soc., P4.9. [Available online
at https://ams.confex.com/ams/WAF-NWP-MESO/techprogram/
paper_23074.htm.]
——, G. DiMego, M. S. Tracton, and B. Zhou, 2003: NCEP short-
range ensemble forecasting (SREF) system: Multi-IC, multi-
model and multi-physics approach. Research Activities in
Atmospheric andOceanicModeling,Rep. 33, CAS/JSCWorking
Group Numerical Experimentation (WGNE), WMO/TD-1161,
5.09–5.10.
Frogner, I. L., H. Haakenstad, and T. Iversen, 2006: Limited-
area ensemble predictions at the Norwegian Meteorological In-
stitute. Quart. J. Roy. Meteor. Soc., 132, 2785–2808, doi:10.1256/
qj.04.178.
Giard, D., 2001: Blending of initial fields in ALADIN. Internal
Documentation Note, GMAP/CNRM, Meteo-France, 28 pp.
[Available online at http://www.cnrm.meteo.fr/gmapdoc/
IMG/ps/Blending.aw-3.ps.]
Grimit, E. P., and C. F. Mass, 2002: Initial results of a mesoscale
short-range ensemble forecasting system over the Pacific
Northwest. Wea. Forecasting, 17, 192–205, doi:10.1175/
1520-0434(2002)017,0192:IROAMS.2.0.CO;2.
Hamill, T.M., and S. J. Colucci, 1997: Verification ofEta/RSM short-
range ensemble forecasts. Mon. Wea. Rev., 125, 1312–1327,
doi:10.1175/1520-0493(1997)125,1312:VOERSR.2.0.CO;2.
Hersbach, H., 2000: Decomposition of the continuous ranked
probability score for ensemble prediction systems. Wea. Fore-
casting, 15, 559–570, doi:10.1175/1520-0434(2000)015,0559:
DOTCRP.2.0.CO;2.
Iversen, T., A. Deckmyn, C. Santos, K. Sattler, J. B. Bremnes,
H. Feddersen, and I. L. Frogner, 2011: Evaluation of
‘GLAMEPS’—A proposed multimodel EPS for short
range forecasting. Tellus, 63A, 513–530, doi:10.1111/
j.1600-0870.2010.00507.x.
Jolliffe, I., and D. Stephenson, 2003: Forecast Verification: A
Practitioner’s Guide in Atmospheric Science. Wiley and Sons,
240 pp.
Leutbecher, M., and T. Palmer, 2008: Ensemble forecasting.
J. Comput. Phys., 227, 3515–3539, doi:10.1016/j.jcp.2007.02.014.Li, X., M. Charron, L. Spacek, and G. Candille, 2008: A regional
ensemble prediction system based on moist targeted singular
vectors and stochastic parameter perturbation. Mon. Wea.
Rev., 136, 443–462, doi:10.1175/2007MWR2109.1.
Lynch, P., and X. Huang, 1992: Initialization of the HIRLAM
model using a digital filter. Mon. Wea. Rev., 120, 1019–1034,
doi:10.1175/1520-0493(1992)120,1019:IOTHMU.2.0.CO;2.
——, D. Giard, and V. Ivanovici, 1997: Improving the efficiency of
a digital filtering scheme for diabatic initialization.Mon. Wea.
Rev., 125, 1976–1982, doi:10.1175/1520-0493(1997)125,1976:
ITEOAD.2.0.CO;2.
Machenhauer, B., and J. E. Haugen, 1987: Test of a spectral limited
area shallow water model with time dependent lateral bound-
ary conditions and combined normal mode/semi-Lagrangian
time integration schemes. Proc. ECMWF Workshop on
Techniques for Horizontal Discretization in Numerical Pre-
diction Models,Reading, United Kingdom, ECMWF, 361–377.
Magnusson, L., M. Leutbecher, and E. K€allen, 2008: Comparison
between singular vectors and breeding vectors as initial
2058 MONTHLY WEATHER REV IEW VOLUME 142
perturbations for the ECMWF Ensemble Prediction System.
Mon. Wea. Rev., 136, 4092–4104, doi:10.1175/2008MWR2498.1.
Marsigli, C., A. Montani, and T. Paccagnella, 2008: A spatial verifi-
cation method applied to the evaluation of high-resolution
ensemble forecasts. Meteor. Appl., 15, 125–143, doi:10.1002/
met.65.
Mason, I., 1982: Amodel for assessment of weather forecasts.Aust.
Meteor. Mag., 30, 291–303.McMurdie, L., and C. F. Mass, 2004: Major numerical forecast
failures over the northeast Pacific. Wea. Forecasting,
19, 338–356, doi:10.1175/1520-0434(2004)019,0338:
MNFFOT.2.0.CO;2.
Saetra,O., H.Hersbach, J. Bidlot, andD.Richardson, 2004: Effects
of observation errors on the statistics for ensemble spread and
realiability. Mon. Wea. Rev., 132, 1487–1501, doi:10.1175/
1520-0493(2004)132,1487:EOOEOT.2.0.CO;2.
Stanski, H., L. Wilson, and W. Burrows, 1989: Survey of common
verification methods in meteorology. WMO/WWW Tech.
Rep. 8, 114 pp.
Stappers,R., and J. Barkmeijer, 2011: Properties of singular vectors
using convective available potential energy as final time norm.
Tellus, 63A, 373–384, doi:10.1111/j.1600-0870.2010.00501.x.
Stensrud, D. J., J. W. Bao, and T. T. Warner, 2000: Using initial
condition and model physics perturbations in short-range en-
semble simulations of mesoscale convective systems. Mon.
Wea. Rev., 128, 2077–2107, doi:10.1175/1520-0493(2000)128,2077:
UICAMP.2.0.CO;2.
Toth, Z., and E. Kalnay, 1993: Ensemble forecasting at NMC:
The generation of perturbation. Bull. Amer. Meteor. Soc.,
74, 2317–2330, doi:10.1175/1520-0477(1993)074,2317:
EFANTG.2.0.CO;2.
——, and ——, 1997: Ensemble forecasting at NCEP and the
breeding method. Mon. Wea. Rev., 125, 3297–3319,
doi:10.1175/1520-0493(1997)125,3297:EFANAT.2.0.CO;2.
Wang, X., and C. Bishop, 2003: A comparison of breeding and
ensemble Kalman filter ensemble forecast schemes. J. Atmos.
Sci., 60, 1140–1158, doi:10.1175/1520-0469(2003)060,1140:
ACOBAE.2.0.CO;2.
Wang, Y., T. Haiden, and A. Kann, 2006: The operational Limited
Area Modelling system at ZAMG: ALADIN-Austria.€Osterreich. Beitr. Meteor. Geophys., 37, 33 pp.
——, A. Kann, M. Bellus, J. Pailleux, and C. Wittmann, 2010: A
strategy for perturbing surface initial conditions in LAMEPS.
Atmos. Sci. Lett., 11, 108–113, doi:10.1002/asl.260.
——, and Coauthors, 2011: The Central European limited-area
ensemble forecasting system: ALADIN-LAEF.Quart. J. Roy.
Meteor. Soc., 137, 483–502, doi:10.1002/qj.751.
Warner, T., R. Peterson, and R. Treadon, 1997: A tutorial on
lateral boundary conditions as a basic and potentially se-
rious limitation to regional numerical weather predic-
tion. Bull. Amer. Meteor. Soc., 78, 2599–2617, doi:10.1175/
1520-0477(1997)078,2599:ATOLBC.2.0.CO;2.
Wei,M., Z. Toth, R.Wobus, andY. Zhu, 2008: Initial perturbations
based on the ensemble transform (ET) technique in the NCEP
global operational forecast system. Tellus, 60A, 62–79,
doi:10.1111/j.1600-0870.2007.00273.x.
Wilks, D. S., 2006: Statistical Methods in the Atmospheric Sciences.
2nd ed. Academic Press, 627 pp.
Zhang, F., C. Snyder, and R. Rotunno, 2002: Mesoscale predictability
of the ‘‘surprise’’ snowstorm of 24–25 January 2000. Mon. Wea.
Rev., 130, 1617–1632, doi:10.1175/1520-0493(2002)130,1617:
MPOTSS.2.0.CO;2.
MAY 2014 WANG ET AL . 2059