a nonlinear hybrid model of a 4-cylinder engine for idle speed control andrea balluchi (1), marco...
TRANSCRIPT

A Nonlinear Hybrid Model of a 4-Cylinder Engine for Idle Speed Control
Andrea Balluchi (1), Marco Zoncu (1), Tiziano Villa (1), Alberto L. Sangiovanni-Vincentelli (1, 2)
(1) PARADES E.E.I.G., Roma, Italy.(2) Dept. of EECS, University of California, Berkeley CA.
CC Meeting in Amsterdam June 16-17, 2003.
The Idle Speed Control Problem
specifications:
Maintaining the crankshaft speed within a specified range despite load torque disturbances and transmission engagements/disengagements.
constraints:
Good combustion and emission quality;
Acceptable NVH characteristics.

Nonlinear Hybrid Model of the Engine
Power-train (CTS + FSM)
Cylinders (FEM + DES)
Intake manifold(CTS)
n(t)
(t)p(t)(t) T(t)
Tload(t)spark
clutchcontrol inputs
disturbance inputs
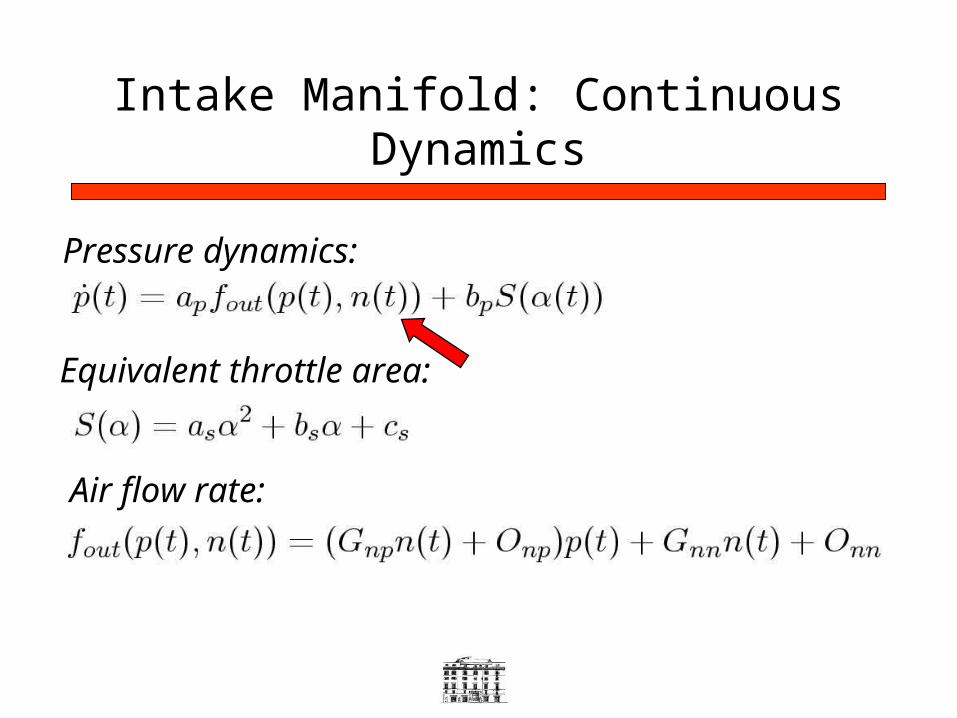
Intake Manifold: Continuous Dynamics
Pressure dynamics:
Equivalent throttle area:
Air flow rate:
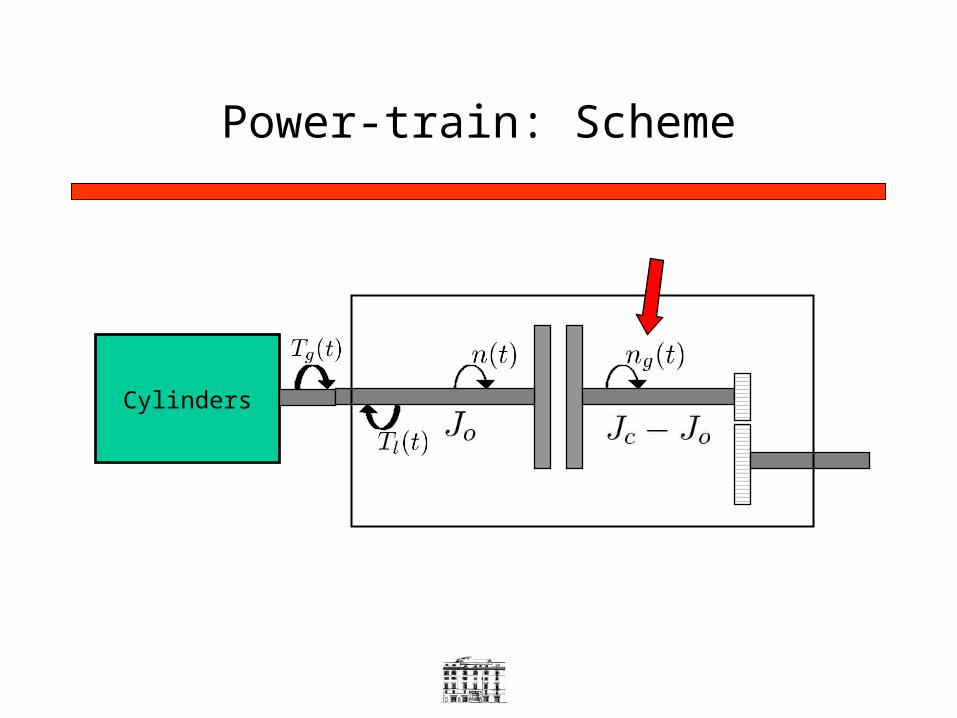
Power-train: Scheme
Cylinders
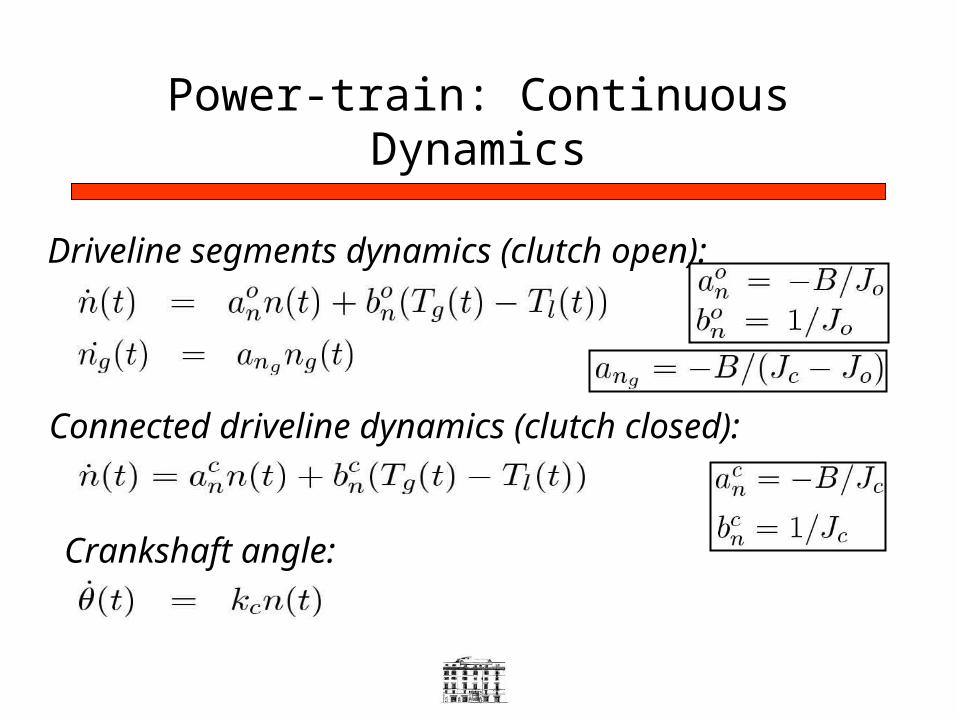
Power-train: Continuous Dynamics
Driveline segments dynamics (clutch open):
Connected driveline dynamics (clutch closed):
Crankshaft angle:
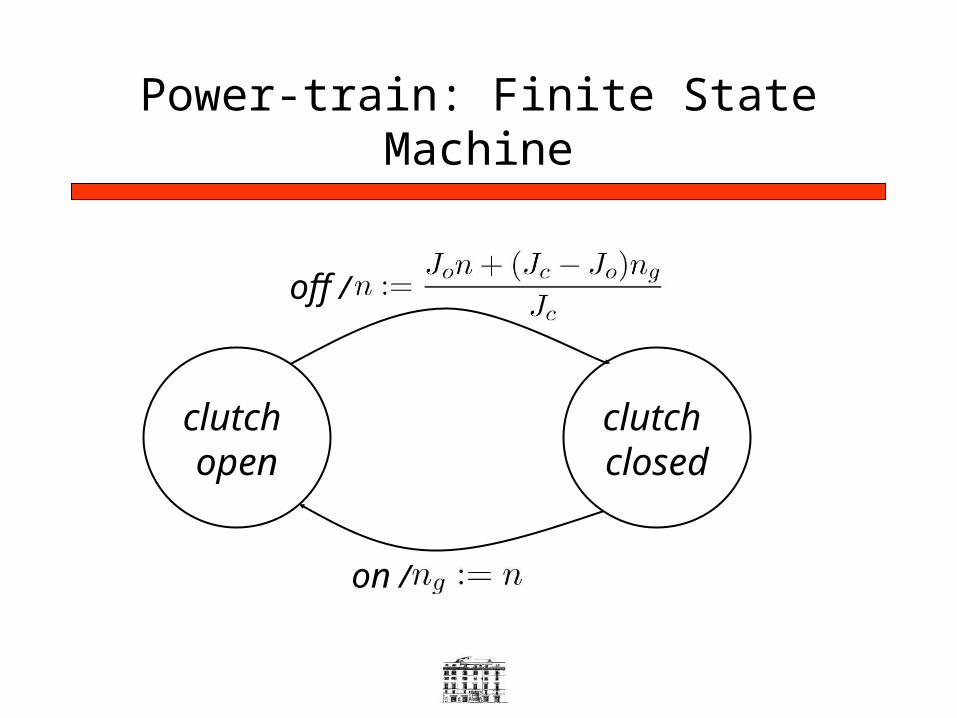
Power-train: Finite State Machine
off /
clutch open
clutch closed
on /

Single Cylinder’s Finite State Machine
dc
dcdc
dc
spk
spk
spk&
dc
dc
I
H
BS
ASPA
NA
C E
negative spark advancenegative spark advance positive spark advancepositive spark advance
T := 0AS to H
:= -
T := TE(m, - )
NA to AS
T := TE(m, )PA to AS
:= 180 -
T := -TC(p,n)
BS to PA
m := Gmpp + M0
T := -TC(p,n)
I to BS
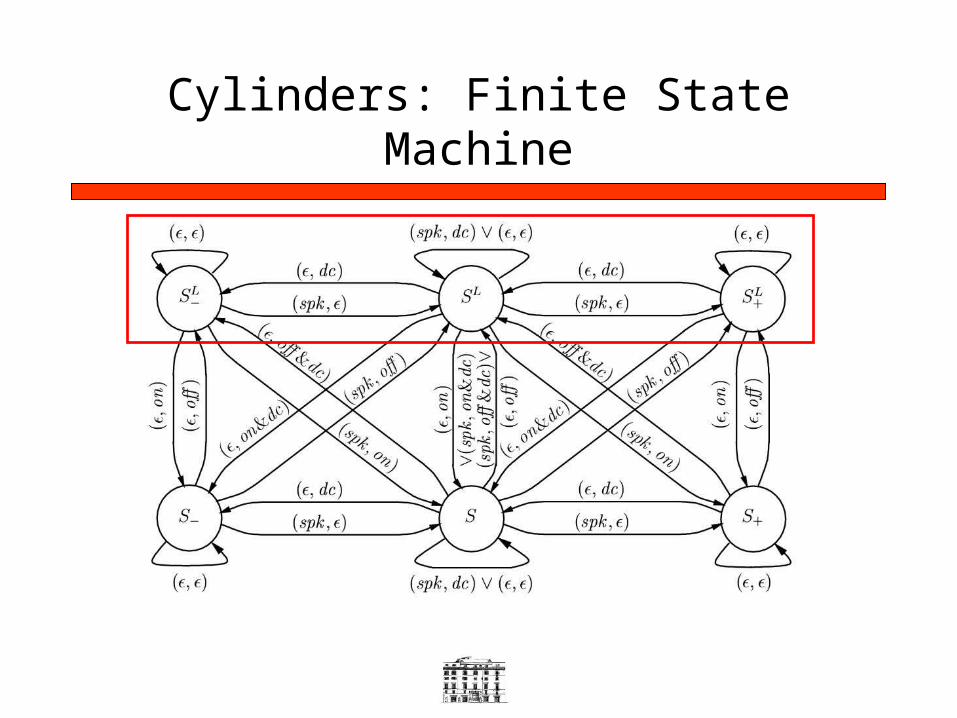
Cylinders: Finite State Machine
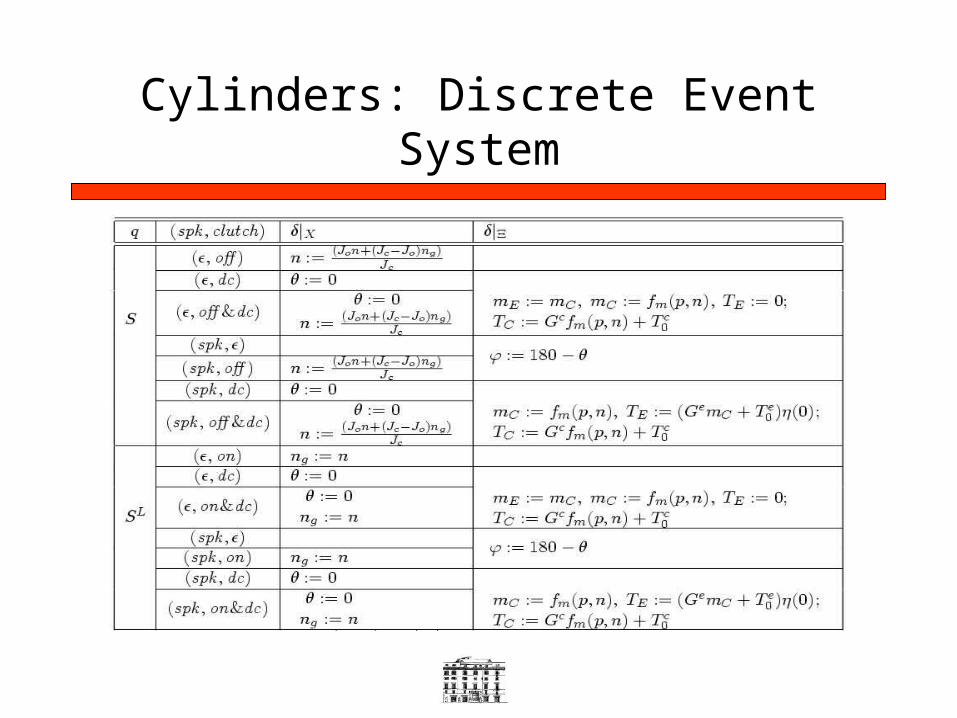
Cylinders: Discrete Event System

Cylinders: Discrete Event System
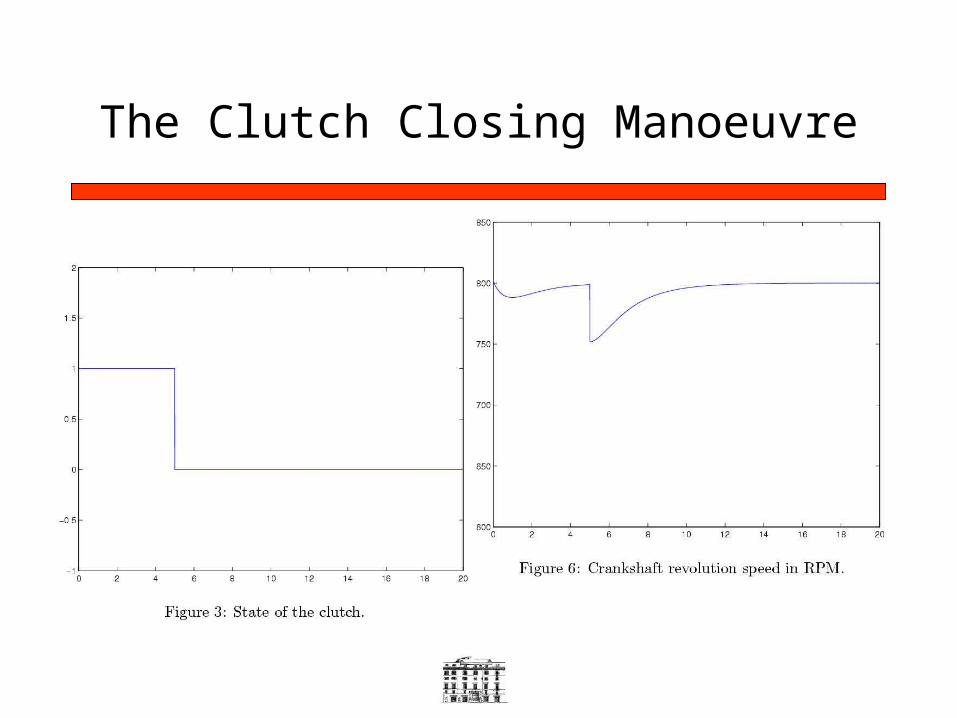
The Clutch Closing Manoeuvre
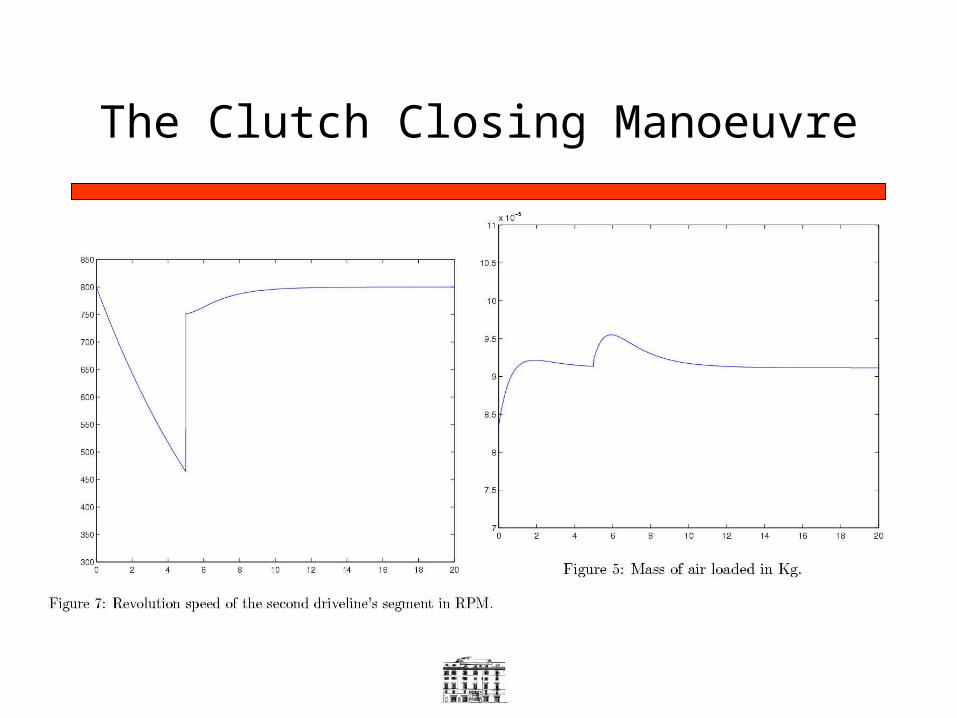
The Clutch Closing Manoeuvre

The Clutch Closing Manoeuvre

Hybrid Model’s Successive Refinements
single-location automaton
two-location automaton with spark advance
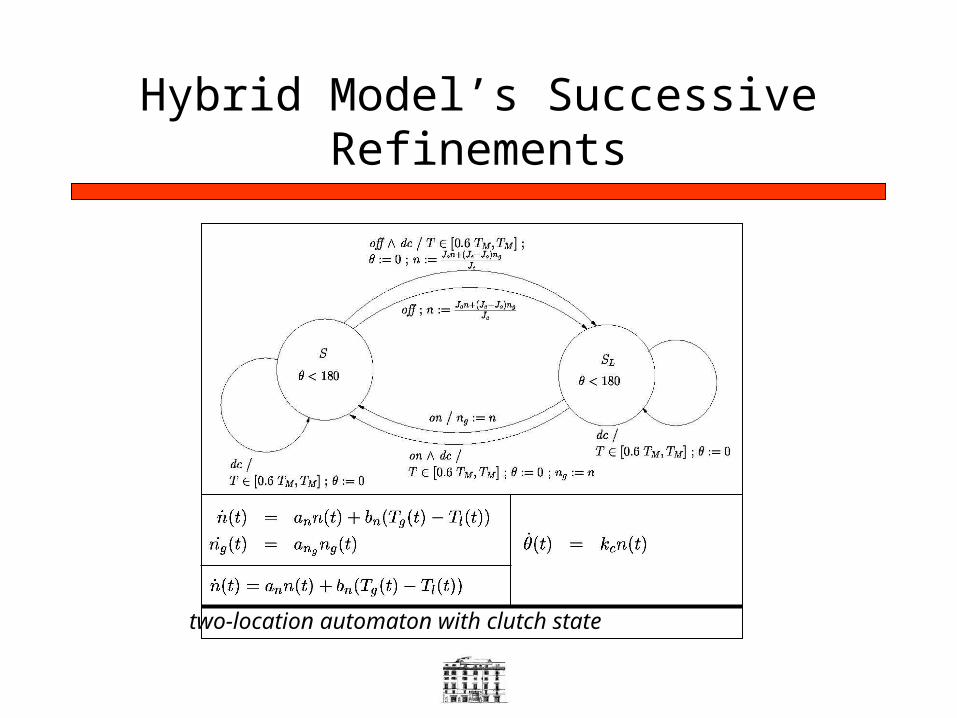
Hybrid Model’s Successive Refinements
two-location automaton with clutch state

Hybrid Model’s Successive Refinements
two-location automaton with manifold dynamics

Hybrid Model’s Successive Refinements
three-location automaton

Comparative Simulations
• Single-location Vs Two-location with spark advance
Tl
Tg
dc
Tg
Tl
dc
spark=20 o
=14 o

Comparative Simulations
• Single-location Vs Two-location with spark advance
dc
n
dc
spark
n
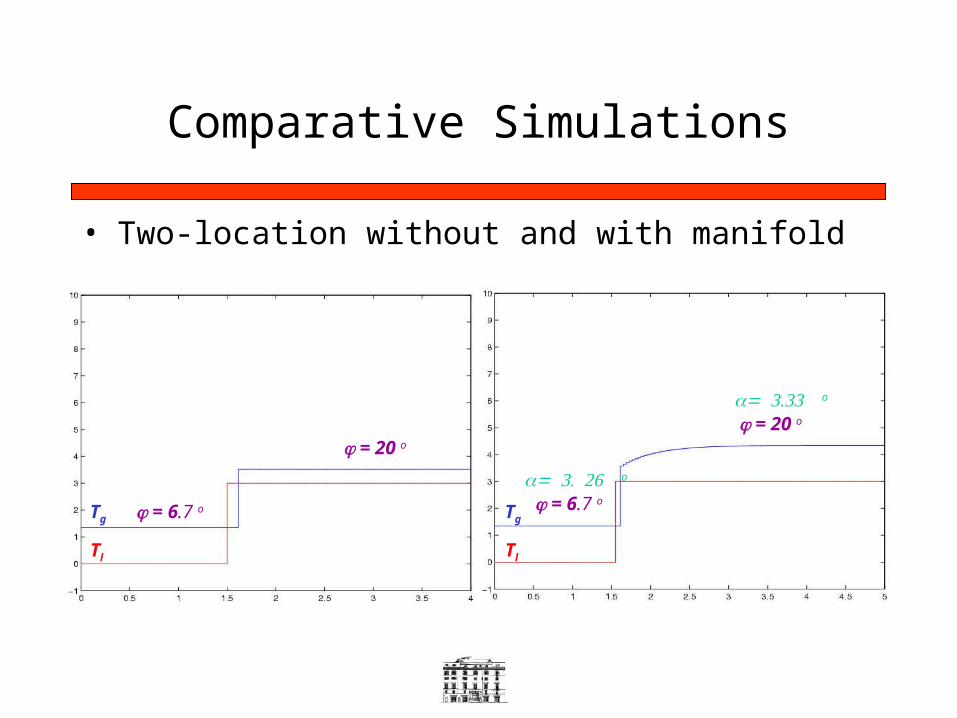
Comparative Simulations
• Two-location without and with manifold
Tg
Tl
= 20 o
o
= 6.7 o
o
Tl
Tg = 6.7 o
= 20 o
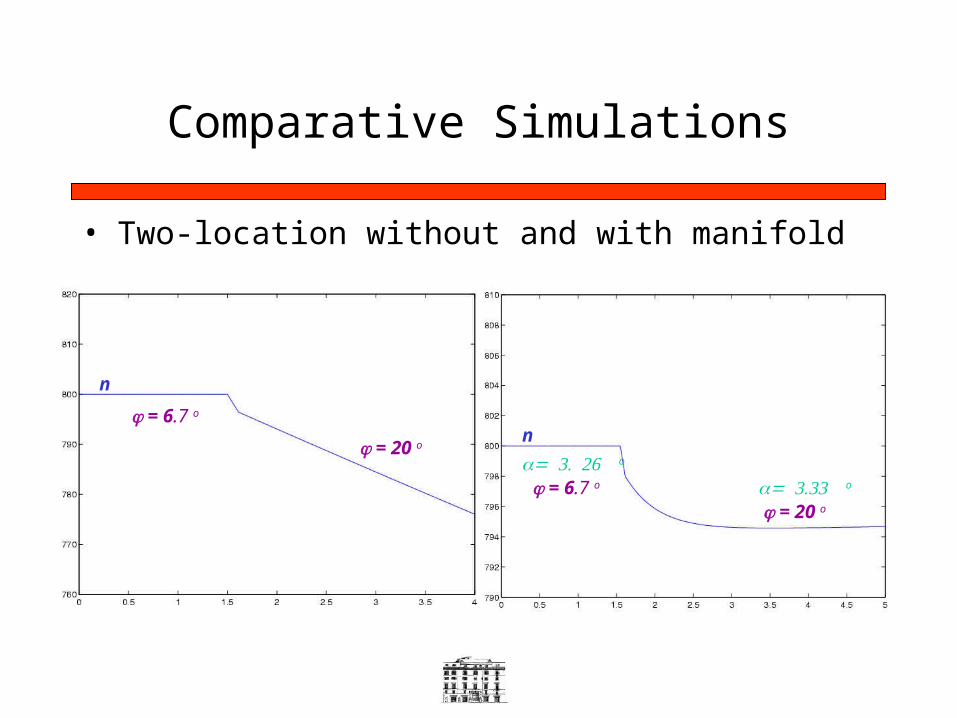
Comparative Simulations
• Two-location without and with manifold
n
= 6.7 o
= 20 on
= 6.7 o
o
= 20 o
o

Comparative Simulations
• Two-location Vs Three-location
Tl
Tg
Tg
Tl
= 5 o
= 0 o
= -3.7 o
o
= 5 o
o
o
o

Comparative Simulations
• Two-location Vs Three-location
Tl
= 5 o
o
n
= 5 o
o
= 0 o
o
n
= 5 o
o
= -3.7 o
o

Conclusions
• Nonlinear model of the intake manifold;
• Better modeling of the torque generation mechanism;
• Modeling of the secondary driveline.