a review on importance of universal gripper … · a review on importance of universal gripper in...
TRANSCRIPT

255
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
A REVIEW ON IMPORTANCE OF UNIVERSALGRIPPER IN INDUSTRIAL ROBOT APPLICATIONS
Patakota Venkata Prasad Reddy1* and V V N Satya Suresh1
*Corresponding Author: Patakota Venkata Prasad Reddy,[email protected]
The main object of this report is importance of Universal Hand/Gripper in industrial Robotapplications and will deal exclusively with gripping of different variety of materials/parts by usingthe Universal gripper. So, that we can easily avoid the using of one type of gripper for each part.The design of the end-effector is a critical consideration in the applications of robotics to industrialoperations. The end effector must typically be designed for the specific application. By comparisonto the human hand, a robot’s gripper is very limited in terms of its mechanical complexity, practicalutility and general applications. In order to realize the full potential of future robotics technology,grippers must be designed more like human hand, both in their sensory and control capabilitiesas well as their anatomical configuration.
Keywords: Gripper, Manipulator, Degrees of freedom, Workpart
INTRODUCTIONA robotic gripper is an essential componentof a robotic manipulator. It serves as the robot’shand and allows the robot to manipulateobjects. Recently robotic gripper is widely usedfor different tasks in various fields. Variety ofrobotic grippers is developed in high flexibilityand multi-function. Particularly, humanoid robottechnology in this area attracts high attentionof public. This project is aimed to study currentexisting robotic grippers and explain theimportance of universal gripper to achievesimple grasping tasks of different workparts.
ISSN 2278 – 0149 www.ijmerr.comVol. 2, No. 2, April 2013
© 2013 IJMERR. All Rights Reserved
Int. J. Mech. Eng. & Rob. Res. 2013
1 Faculty of Mahatma Gandhi Institute of Technology (MGIT), Hyderabad, AP, India.
An end effector is the device at the end of arobotic arm, designed to interact with theenvironment. The robot’s use determines thetype of end effector needed. Robotic endeffectors can be used in many applications.NASA has used end effectors on the roboticarms on the Space Shuttle and the InternationalSpace Station. The Space Shuttle’s RemoteManipulator System (RMS) has been movedin varied ways to accomplish a particularmission. The RMS has seven Degrees ofFreedom (DOF). In robot terms, this meansthat the arm can bend and rotate in seven
Research Paper

256
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
different directions to accomplish its tasks.Like a human arm, it has a shoulder joint thatcan move in two directions (2 DOF); an elbowjoint (1 DOF); a wrist joint that can roll, pitch,and yaw (3 DOF); and a gripping device (1DOF). The gripping device is called an endeffector. That means it is located at the end ofthe arm and it has an effect (such as grasping)on objects within its reach. Other spaceutilization may include tools used on rovers forpurposes of scooping up samples, imagingthe contents of the scoop, and performingscience experiments. NASA has alsointroduced a Robonaut that uses an endeffector at the end of the arm that more closelysimulates the human hand. Robonaut 2 is thelatest addition to this effort. This robot can lift20 lbs. with each arm and has nimble hands,fingers, and opposable thumbs usingdexterous, human-like features to accomplishmany jobs.
TYPES OF GRIPPERSGrippers are end effectors used to grasp andhold objects. The objects are generallyworkparts that are to be moved by the robot.These part-handling applications includemachine loading and unloading, picking partsfrom a conveyor, and arranging parts onto apallet. In addition to workparts, other objectshandled by robot grippers include cartons,bottles, raw materials, and tools. The Singlegripper is only one grasping device is mountedon the robot's wrist. A double gripper has twogripping devices attached to the wrist and isused to handle two separate objects. The twograsping devices can be actuatedindependently. Grippers grasp and manipulateobjects during the work cycle. Typically theobjects grasped are workparts that need to
be loaded or unloaded from one station toanother. Grippers may be custom-designed tosuit the physical specifications of the workpartsthey have to grasp. The robot end effecter mayalso use tools.
Tools are used to perform processingoperations on the workpart. Typically the robotuses the tool relative to a stationary or slowly-moving object; in this way the process iscarried-out. For example, spot welding, arcwelding, and spray painting-which all use a toolfor processing the operation-may all becarried-out in this way. Other examples wherea tool is held by the robotic manipulator, andused against the workpart include: rotatingspindle for drilling, routing, grinding, andsimilar operations; the use of a heating torch;and when using a water jet cutting tool. Foreach instance, the robot controls both theposition of the workpart, and the position ofthe tool relative to the workpart; for this purpose,therefore, the robot must be able to transmitcontrol signals to the tool for starting, stooping,and otherwise regulating the tools actions.Figure 1 illustrates a sample gripper and tool.
Figure 1: Robotic Gripper and Tool(Spot Welding)

257
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
As end effectors, grippers are describedas follows:
Mechanical Gripper
It is an end effector that uses mechanicalfingers actuated by a mechanism to grasp anobject. The fingers, sometimes called jaws,are the appendages of the gripper that actuallymake contact with the object. The fingers areeither attached to the mechanism or are anintegral part of the mechanism. An example ofmechanical gripper is shown in Figure 2. Interchangeable Fingers
Mechanical gripper whereby, to accommodatedifferent workpart sizes, different fingers maybe attached. An example of interchangeablegripper is shown in Figure 4.
Figure 2: Mechanical Gripper
Two or more fingers that can be actuatedby robot controller to open and close on aworkpart. The use of replaceable fingersallows for wear and interchangeability.Different sets of fingers for use with the samegripper mechanism can be designed toaccommodate different part models.
Simple Mechanical Devices
For example, hooks and scoops.
Dual Grippers
Mechanical gripper with two grippingdevices in one end effector for machineloading and unloading. Reduces cycle timeper part by gripping two workparts at thesame time. An example of dual gripper isshown in Figure 3.
Figure 3: Dual Gripper
Figure 4: Interchangeable Gripper
Sensory Feedback Fingers
Mechanical gripper with sensory feedbackcapabilities in the fingers to aid locating theworkpart; and to determine correct grip forceto apply (for fragile workparts).
Multiple Fingered Grippers
Mechanical gripper with the general anatomyof the human hand. An example of multifingered gripper is shown in Figure 5.
Standard Grippers
Mechanical grippers that are commerciallyavailable, thus reducing the need to custom-

258
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
design a gripper for each separate robotapplication.
Vacuum Gripper
Suction cups are used to hold flat objects.Using strong suction cups to lift an item, the“vacuum” is used to lift large, flat, smoothsheets of material like wood paneling, metal,plastic and glass. An example of vacuumgripper is shown in Figure 6.
Magnetized Devices
Making use of the principles of magnetism,these are used for holding ferrous workparts.An example of magnetic gripper is shown inFigure 7.
Figure 5: Multiple Fingered Gripper
Figure 6: Vacuum Gripper
The robot arm moves into position andsecurely plants one or more airtight suctioncups to the material, and then activates apowerful inward suction force. The vacuumrequires less power than either of the other twodesigns, but is also more prone to mishapsdue to misaligned suction cups that fail toachieve an airtight seal.
Figure 7: Magnetic Gripper
Magnetic grippers are pickup different sizesparts very fast. Electromagnetic grippers areeasier to control, but require a d.c power andan appropriate controller unit. Permanentmagnets have the advantage of not requiringan external power source to operate themagnet.
Adhesive Devices
Gripper designs in which an adhesivesubstance performce the grasping action canbe used to handle fabrics and other lightweightmaterials. An example of adhesive gripper isshown in Figure 8.
The requirements on the items to behandled are that they must be gripped on oneside only. Deploying adhesive substancesthese hold flexible materials, such as fabric.
Various other types of grippers based onapplication are as follows:
The Clamp
Using a pincer-, scissors- or hook-arrangement, the “Clamp” style of gripper acts

259
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
like a human hand. The item to be manipulatedis positioned between two extrusions whichcontract, trapping the item between them. Thisdesign is perfect for robots handlinglightweight and/or odd-shaped items likeempty boxes, packing material, toys and lumpsof irregularly shaped material like rock ormetal.
The Air Hand
The “Air-Hand” gripper uses an expandingpiece of dense rubber material to pressagainst the interior of an item and lift it thatway. Think of dropping an un-inflated ballooninside of a cup, and then inflating it until it istight against the sides of the cup. You could liftit by virtue of the friction created against thewalls of the cup. This design is great for justthat; robots designed to manipulate cups,buckets, hollow tubes or any other material thathas an easily accessible hollow spot.
Basic Gripper
Basic gripper in this study context is an open-close gripper controlled by a DC servo motorequipped with rotary encoder from Maxonmotors (18 V, 3.0 W, lift-torque 10.8 mNm, maxrpm 16000 rpm) via spur gears and two-wayball screw with a 1mm lead. The encoder’sresolution is 100 ulse/rotation. The unique partabout the gripper compared to other grippersin the market is the thin part on both fingersthat are sensitive to changes in force. Straingages are attached on both sides of the thinpart of a finger where the strain.
This is useful in maintaining the graspingforce during tracing. A thick part just behindthe thin part acts as a stopper in case ofexcessive force to prevent the thin part fromfailure. 4 sets of infrared sensor (Toshiba) areembedded onto the fingers to give informationon whether clothes or fabric is inside thegripper or not. Based on the task, the thin partis designed to withstand 558 gf of force beforeit touches the thick part behind. This is morethan enough for clothes handling. RCH-40 isalways equipped with a basic gripper is shownin Figure 9a.
Roller Gripper
Roller gripper is a customized version of thebasic gripper. Basically, this gripper is thesame as the normal gripper except for the rollerfingertips and the inner fingers. The gripperalso has 3 sets of infrared sensors comparedto 4 sets for the basic gripper. From numerousclothes manipulation experiments, it was foundthat 3 sets of infrared sensors are sufficientfor clothes manipulation. The rollers atfingertips are made of identical spur gears(diameter: 14 mm, number of teeth: 14,
Figure 8: Adhesive Gripper
260
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
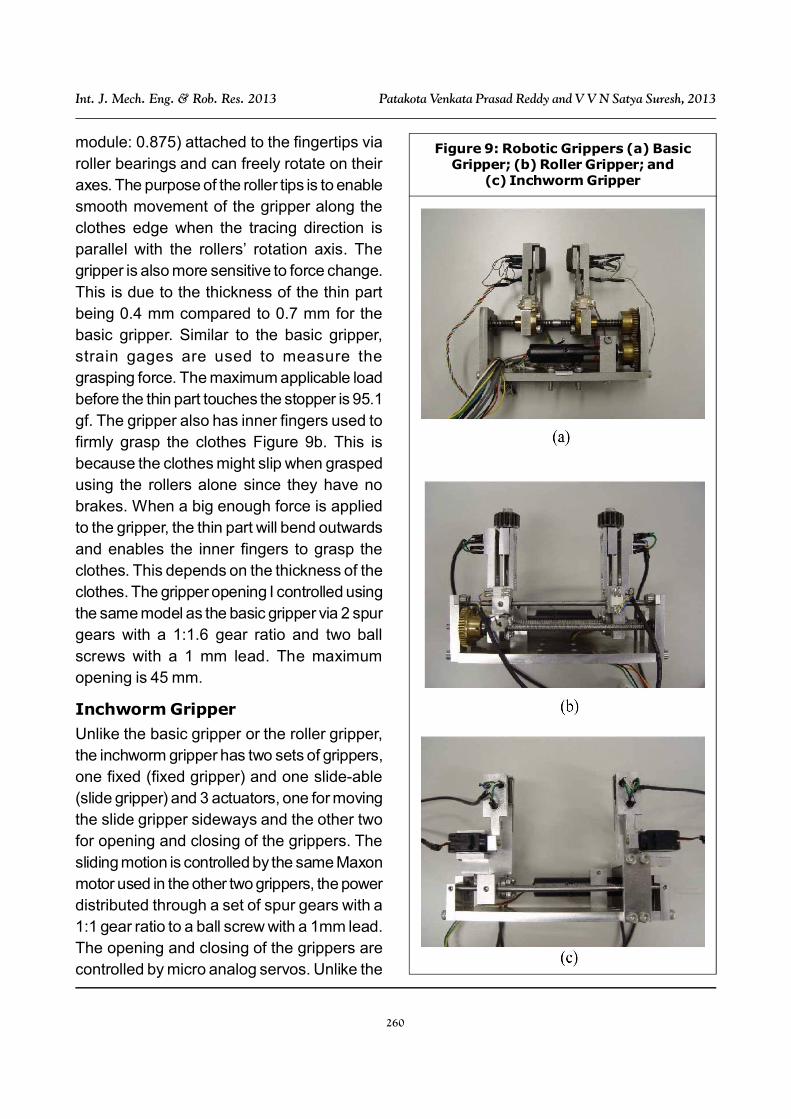
module: 0.875) attached to the fingertips viaroller bearings and can freely rotate on theiraxes. The purpose of the roller tips is to enablesmooth movement of the gripper along theclothes edge when the tracing direction isparallel with the rollers’ rotation axis. Thegripper is also more sensitive to force change.This is due to the thickness of the thin partbeing 0.4 mm compared to 0.7 mm for thebasic gripper. Similar to the basic gripper,strain gages are used to measure thegrasping force. The maximum applicable loadbefore the thin part touches the stopper is 95.1gf. The gripper also has inner fingers used tofirmly grasp the clothes Figure 9b. This isbecause the clothes might slip when graspedusing the rollers alone since they have nobrakes. When a big enough force is appliedto the gripper, the thin part will bend outwardsand enables the inner fingers to grasp theclothes. This depends on the thickness of theclothes. The gripper opening I controlled usingthe same model as the basic gripper via 2 spurgears with a 1:1.6 gear ratio and two ballscrews with a 1 mm lead. The maximumopening is 45 mm.
Inchworm Gripper
Unlike the basic gripper or the roller gripper,the inchworm gripper has two sets of grippers,one fixed (fixed gripper) and one slide-able(slide gripper) and 3 actuators, one for movingthe slide gripper sideways and the other twofor opening and closing of the grippers. Thesliding motion is controlled by the same Maxonmotor used in the other two grippers, the powerdistributed through a set of spur gears with a1:1 gear ratio to a ball screw with a 1mm lead.The opening and closing of the grippers arecontrolled by micro analog servos. Unlike the
Figure 9: Robotic Grippers (a) BasicGripper; (b) Roller Gripper; and
(c) Inchworm Gripper

261
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
other grippers, the actuators only control oneof the two fingers of a gripper. The servos aredirectly connected to the fingers which makesthe opening and closing motion to be rotational.This means the bigger the opening the harderfor the infrared sensors to function properlybecause the opening is in rotation form andnot linear.. There are 3 sets of infrared sensorson each gripper. The layout of the infraredsensors is the same as the roller gripper. Theslide gripper can slide a maximum 60 mmaway from the fixed gripper. Strain gages areattached to the thin part of the fixed finger onboth the slide and fixed grippers. The thin partsof the grippers are 0.5 mm in thickness andshould bear up to 339.5 gf of force beforetouching the thick parts that act as stoppers.This inchworm gripper is shown in Figure 9c,will enable the clothes to be firmly grasped atall times during clothes manipulation.
UNIVERSAL GRIPPERGripping and holding of objects are key tasksfor robotic manipulators. The development ofuniversal grippers able to pick up unfamiliarobjects of widely varying shape and surfaceproperties remains, however, challenging.Most current designs are based on themultifingered hand, but this approachintroduces hardware and softwarecomplexities. These include large numbers ofcontrollable joints, the need for force sensingif objects are to be handled securely withoutcrushing them, and the computationaloverhead to decide how much stress eachfinger should apply and where. Here wedemonstrate a completely different approachto a universal gripper. Individual fingers arereplaced by a single mass of granular materialthat, when pressed onto a target object, flows
around it and conforms to its shape. Uponapplication of a vacuum the granular materialcontracts and hardens quickly to pinch andhold the object without requiring sensoryfeedback. This advance opens up newpossibilities for the design of simple, yet highlyadaptive systems that excel at fast gripping ofcomplex objects. Universal gripper withdifferent applications is shown in Figure 10.
Figure 10: Universal Gripperwith Different Applications
Source: Brown et al. (2010)
Tasks that appear simple to humans, suchas picking up objects of varying shapes, canbe vexingly complicated for robots. Securegripping not only requires contacting an object,but also preventing potential slip while theobject is moved. Slip can be prevented eitherby friction from contact pressure or byexploiting geometric constraints, for exampleby placing fingers around protrusions or intothe opening provided by the handle of a cup.For reliable robotic gripping, the standarddesign approach is based on a hand with twoor more fingers, and typically involves acombination of visual feedback and forcesensing at the fingertips. Given the

262
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
evolutionary success of the multifingered handin animals, this approach clearly has manyadvantages. However, it requires a centralprocessor or brain for a multitude of decisions,many of which have to be made before thehand even touches the object, for exampleabout how wide to spread the fingers apart.Therefore, a multifingered gripper not only isa complex system to build and control, butwhen confronted with unfamiliar objects it mayrequire learning the shape and stiffness of theobject. The focus of this work is on the problemof gripping, not manipulation, and seeks tooffload system complexities such as tactilesensing and computer vision onto uniquemechanical design. This approach replacesindividual fingers by a material or interface thatupon contact molds itself around the object.Such a shapes and all shape adaptation isperformed autonomously by the contactingmaterial and without sensory feedback.
Universal robot grippers are robotic endeffectors that can grip a wide variety ofarbitrarily shaped objects. Proposed universalgrippers have ranged from vacuum-basedsuction grippers to multifingered hands, andthese can be divided along a spectrum fromactive universal grippers to passive universalgrippers (Scott, 1985). Most active universalgrippers typically have an anthropomorphicmultifingered design with many independentlyactuated joints. Many such grippers have beendeveloped, and multifingered grasping is anactive area of research (Tella et al., 1986).
Consisting of a single mass of granularmaterial encased in an elastic membrane, thegripper can conform to the shape of the targetobject, then vacuum-harden to grip it rigidly,later using pressure to reverse this transition-
releasing the object and returning to adeformable state. An example of this grippercan be seen in Figure 11.
Figure 11: A Universal Gripper is Ableto Grip a Wide Variety of Objects Without
Grasp Planning or Sensory Feedback.Multiple Objects Can Be Gripped at Once
Source: Brown et al. (2010)
This universal gripper that exploits thetemperature-independent fluid like to solid-likephase transition of granular materials. Thisgripper leverages three possible grippingmodes for operation: 1) static friction fromsurface contact; 2) geometric constraints fromcapture of the object by interlocking; and 3)vacuum suction when an airtight seal isachieved on some portion of the object’ssurface (Pak et al., 1995). These threegripping modes are illustrated in Figure 12.By achieving one or more of the three grippingmodes, the gripper can grip many differentobjects with widely varying shape, weight, andfragility, including objects that are traditionallychallenging for other universal grippers. Forexample, we have successfully been able togrip a coin, a tetrahedron, a hemisphere, a raw

263
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
CONCLUSIONIn this paper, we have presented a universalgripper in industrial robot applications will dealexclusively with gripping of different variety ofmaterials/parts comparing with other varioustypes of grippers. So, that we can easily avoidthe using of one type of gripper for each part.The design of the end-effector is a criticalconsideration in the applications of roboticsto industrial operations. The end effector musttypically be designed for the specificapplication. By comparison to the human hand,a robot's gripper is very limited in terms of itsmechanical complexity, practical utility andgeneral applications. In order to realize the fullpotential of future robotics technology, grippersmust be designed more like human hand, bothin their sensory and control capabilities as wellas their anatomical configuration.
With this universal gripper, objects of verydifferent shape, weight, and fragility can begripped, and multiple objects can be grippedat once while maintaining their relativedistance and orientation. This diversity ofabilities may make the gripper well suited foruse in unstructured domains ranging frommilitary environments to the home and,perhaps, for variable industrial tasks, such asfood handling. The gripper ’s airtightconstruction also provides the potential for usein wet or volatile environments and permitseasy cleaning.
The prime interest of this paper is to explorethe advantages of universal gripper and itsapplications for different product typemanufacturing robot application industries. So,the industry performance will increase anddecrease the cost of the product effectively.
egg, a jack toy, and a foam earplug. Whenmounted to the robot arm, the gripper functionsentirely in open loop-without grasp planning,vision, or sensory feedback. Optimalperformance of a universal gripper ismaintained by resetting the gripper to a neutralstate between gripping tasks. Prior to the workpresented here, this was accomplished byshaking the gripper, by kneading ormassaging the gripper, or by pushing thegripper against some resetting apparatus thatwas mounted in the workspace, for example.We call this process manually resetting thegripper, and without it, the ability to gripsubsequent objects degrades rapidly. Acapability that we call shooting, which mayserve as a new method for robots to extendtheir workspace and perform tasks like sortingobjects into bins in a factory or throwing awaytrash in a home.
Figure 12: A Universal Gripper CanAchieve Three Separate Gripping Modes.
(Left) Static Friction from SurfaceContact, (Center) Geometric Constraints
from Interlocking, (Right) Vacuum Suctionfrom an Airtight Seal

264
Int. J. Mech. Eng. & Rob. Res. 2013 Patakota Venkata Prasad Reddy and V V N Satya Suresh, 2013
REFERENCES1. Brown E M, Amend J R and Rodenberg
N (2011), “A Positive Pressure UniversalGripper Based on the Jamming ofGranular Material”, IEEE Transactions onRobotics, Vol. 28, pp. 341-350.
2. Hirose S and Umetani Y (1978), “TheDevelopment of Soft Gripper for theVersatile Robot Hand”, Mech. Mach.Theory, Vol. 13, pp. 351-359.
3. Mikell P Groover and Mitchell Weiss(1986), “Indusstrial Robotics”, McGraw-Hill Eds.
4. Möbius M E et al. (2005), “Effect of Air onGranular Size Separation in a VibratedGranular Bed”, Phys. Rev. E., Vol. 72,011304.
5. Monkman G J, Hesse S, Steinmann R andSchunk H (2007), Robot Grippers (Wiley-VCH Verlag GmbH and Co. KGaA,Weinheim).
6. Pak H K, van Doorn E and Behringer R P(1995), “Effects of Ambient Gases onGranular Materials Under VerticalVibration”, Phys. Rev. Lett., Vol. 74,pp. 4643-4646.
7. Scott P B (1985), “The ‘Omnigripper’: AForm of Robot Universal Gripper”,Robotica, Vol. 3, September, pp. 153-158.
8. Tella R, Birk J and Kelley R (1986), “Acontour-Adapting Vacuum Gripper”, inRobot Grippers, D T Pham and W BHeginbotham (Eds.), pp. 86-100,Springer-Verlag, New York.