a solution to security constrained non-convex economic dispatch problem by modified subgradient...
TRANSCRIPT

Electrical Power and Energy Systems 43 (2012) 849–858
Contents lists available at SciVerse ScienceDirect
Electrical Power and Energy Systems
journal homepage: www.elsevier .com/locate / i jepes
A solution to security constrained non-convex economic dispatch problem bymodified subgradient algorithm based on feasible values
Salih Fadıl a,⇑, Ahmet Yazici b, Burak Urazel a
a Department of Electrical and Electronics Engineering, Eskisehir Osmangazi University, 26480 Eskisehir, Turkeyb Department of Computer Engineering, Eskisehir Osmangazi University, 26480 Eskisehir, Turkey
a r t i c l e i n f o a b s t r a c t
Article history:Received 10 June 2010Received in revised form 30 November 2011Accepted 25 May 2012Available online 15 July 2012
Keywords:Economic power dispatchNon-convex fuel cost rate curvesValve point effectSecurity constraintsThe modified subgradient algorithm basedon feasible valuesF-MSG algorithm
0142-0615/$ - see front matter � 2012 Elsevier Ltd. Ahttp://dx.doi.org/10.1016/j.ijepes.2012.05.029
⇑ Corresponding author. Tel.: +90 222 239 2840x32E-mail addresses: [email protected] (S. Fadıl), ay
[email protected] (B. Urazel).
A security constrained power dispatch problem with non-convex total cost rate function for a lossy elec-tric power system is formulated. Then, an iterative solution method proposed by us and based on mod-ified subgradient algorithm operating on feasible values (F-MSG) is used to solve it.
Since all equality and inequality constraints in our nonlinear optimization model are functions of busvoltage magnitudes and phase angles, off-nominal tap settings and susceptance values of svar systems,they are taken as independent variables. Load flow equations are added to the model as equality con-straints. The unit generation constraints, transmission line capacity constraints, bus voltage magnitudeconstraints, off-nominal tap setting constraints and svar system susceptance value constraints are addedinto the optimization problem as inequality constraints. Since F-MSG algorithm requires that all inequal-ity constraints should be expressed in equality constraint form, all inequality constraints are convertedinto equality constraints by the method, which does not add any extra independent variable into themodel and reducing the solution time because of it, before application of it to the optimization model.
The proposed technique is tested on IEEE 30-bus and IEEE 57 bus test systems. The minimum total costrates and the solution times obtained from F-MSG algorithm and from the other techniques are com-pared, and the outperformance of the F-MSG algorithm with respect to the other methods in each testsystem is demonstrated.
� 2012 Elsevier Ltd. All rights reserved.
1. Introduction
Economic dispatch (ED) problem in power systems is a con-strained non-linear optimization problem. The aim of ED is mini-mizing the total active power generation cost rate under someconstraints.
In the literature, many methods have been developed and ap-plied to solve economic dispatch problem. Some of these methodsuse the genetic algorithm [1,2], the particle swarm optimizationtechnique [3,4], the tabu search technique [5,6], the evolutionary,differential evolutionary and the modified differential evolutionaryalgorithms [7–10], the pseudo spot price algorithm [11], the inte-rior point method [12], the quantum-inspired evolutionary algo-rithm [13], and finally the hybrid methods [14].
The non-convex dispatch problem of IEEE 30-bus and IEEE 57-bus test systems are considered in this paper. The dispatch problemof IEEE 30 bus test system was solved by means of tabu search [5],evolutionary programming [7], and improved evolutionary pro-gramming [8], differential evolution and modified differential
ll rights reserved.
64; fax: +90 222 221 39 [email protected] (A. Yazici),
evolution algorithms [9] previously. The dispatch problem of IEEE57 bus system was also solved by means of evolutionary program-ming and mixed-integer genetic algorithm with arithmetic opera-tors [2] previously. In test systems, the minimum total cost rateand solution time values produced by the F-MSG using different ini-tial points and the other methods are compared. The outperfor-mance of the F-MSG method against to the other methods interms of both the minimum total cost rate and solution time isdemonstrated.
The F-MSG method is a deterministic solution method, whichuses deterministic equations at one point to produce the next solu-tion point being closer to the optimum solution in the solutionspace; whereas the evolutionary methods work on a solution pop-ulation rather than on a single solution and use probabilistic toolsto produce new solutions [1–10]. In general, solution times for theevolutionary methods are considerably higher than those of deter-ministic methods for the lossy security constrained economic dis-patch problems with convex cost curve since they work on asolution population. In the problems with non-convex cost curve,the evolutionary methods can find the optimum solution point.Deterministic methods especially based on classical gradientmethod can have difficulty in finding the optimum solution inthe non-convex cost curve case, and this difficulty can be

Nomenclature
R a fictitious monetary unitR set of real numbersN number of buses in the networkNG set that contains all buses to which a generator is con-
nectedNQ set that contains all buses to which a reactive power
source is connectedNB i set that contains all buses directly connected to bus iNtap set that contains all tap changing transformers in the
networkNsvar set that contains all svar systems in the networkL set that contains all lines in the networkUi voltage magnitude of bus idi phase angle of bus irij + jxij series impedance of the line between buses i and jgij + jbij series admittance of the line between buses i and jgshi + jbshi the sum of the half line charging admittance and exter-
nal shunt admittance (svar system), bsh i = bcapi + bsvari, ifany at bus i.
bsvari susceptance of the svar system connected to bus iai off-nominal tap setting value of tap setting facility at
bus ipij, qij active and reactive power flows from bus i to bus j at
bus i border, respectively�pij,�qij active and reactive power flows from bus i to bus j at
bus j border, respectivelypl active power flow on line lPi,Qi net injected active and reactive powers to bus i, respec-
tivelyPG i,QG i active and reactive power generations of the ith unit,
respectively
PLoad,i,QLoad,i active and reactive loads of the ith bus, respectivelyPLoss,l active power loss on the line lPLOSS total active power loss in the networkFi active power generation cost rate function of the ith
generation unitFT total active power generation cost rate of the systemPmin
Gi ; PmaxGi lower and upper active generation limits of the ith gen-
eration unit, respectivelyQmin
Gi ; QmaxGi lower and upper reactive generation limits of the ith
generation unit, respectivelypmax
l maximum active transmission capacity of transmissionline l
nEQ number of equality constraintsnsvar number of static var systems in the networkntap numbers of off nominal tap ratio transformers in the
networkNVAR number of independent variablesxk variable vector obtained at the kth iteration of the inner
loopxn
k variable vector obtained at the kth iteration of the innerloop of the nth outer loop
uk,ck dual variables calculated at the kth iterationun
k ; cnk dual variables calculated at the kth iteration of the inner
loop of the nth outer loopsk positive step size parameter calculated at the kth itera-
tionFn
T total cost rate value which will be checked in the nthouter loop
Dn+1 decrement or increment on Fn value, at the end of nthouter loop, according to whether Fn is feasible or not
e1,e2 tolerance values for kh(x)k and Dn, respectively
850 S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858
overcome by initiating the solution method from different pointsin the solution space and choosing the solution with the minimumcost. In general there is no specific rule in selection of the startingpoints which will lead to the optimum solution. Also, as the num-ber of the selected starting points (number of solution) increases,the total solution time increases proportionally. Hence, using anevolutionary solution method can become advantageous. Althoughthe F-SMG method is a deterministic method, it can find the optimalsolution in the case of non-convex cost function. This is due to itssearch method and the formation of its augmented sharp LaGrangefunction [15].
In PSPA algorithm [11], the power system transmission loss isinserted into the solution procedure via a load flow calculation. Ini-tially, a power flow calculation is carried out with the selected ac-tive power generations; after that, new active generations arecalculated using the active power flows on the transmission linesand pseudo spot price of electricity of each bus. Then, a load flowcalculation is carried out with the newly determined active gener-ations. This iterative procedure continues until the decrease in thecost function is less than a predefined tolerance value. To correctthe bus voltages that exceed their limits, which are found at theend of active power optimization procedure, an iterative reactivepower optimization calculation procedure similar to active poweroptimization procedure is carried out. At the end, the power flowsof the lines that exceed their limits are corrected via an optimiza-tion model which uses generation shift factors of the consideredpower system. In PSPA algorithm, at least three optimization mod-els are used in a row to handle all security constraints. The F-MSGmethod handles all security constraints in a single optimizationmodel, and it does not use load flow calculation in the solution
procedure. Hence, the solution time of the F-MSG is considerablylower than that of the PSPA.
In the literature, classical gradient method is applied to solutionof various power dispatch problems. In those solutions, active gen-erations of the units are taken as independent variables. The powersystem loss is incorporated into the solution process via referencebus penalty factors that are obtained from Jacobian matrix of loadflow solution. The transmission line capacity constraints can behandled using another linear optimization model where the gener-ation shift factors are used. The linear model where active powergeneration changes are determined and the ac power flow calcula-tion are used in an iterative manner to determine the optimal solu-tion where transmission line capacity constraints are met. Thisprocess can be accomplished after finding the minimum cost solu-tion via the gradient method. To handle the bus voltage magnitudeconstraints in the gradient method, the calculation procedure sim-ilar to the active power dispatch can be used. In the calculation, thereactive power generations of the generation units are selected asindependent variables, and this procedure can be applied after thedetermination of the optimal active power generations. In the caseof non-convex cost function, the minimum cost solution can betried to be found using different starting point in the solution spacesince the calculated solution point depends on the selected startingpoint in the classical gradient method.
In the proposed solution algorithm based on F-MSG method[15], the bus voltage magnitudes and phase angles, the off nominaltap settings and the susceptance values of svar systems are takenas independent variables. Since all the constraints can be writtenin terms of those independent variables, the transmission linecapacity constraints, bus voltage magnitude constraints and svar

S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858 851
systems’ susceptance value constraints are handled together in thesame model easily. The load flow equations are imported into themodel as equality constraints; therefore, the system loss is insertedinto the solution process automatically. In the F-MSG algorithm, anupper bound for the cost function value is specified in advance, andthe algorithm tries to find a solution where the cost function is lessthan or equal to the upper bound while all constraints are met. If itfinds it (feasible solution), the upper bound is decreased by a certainamount, otherwise (infeasible solution) the upper bound is increasedby a certain amount. The amount of decrease or increase on theupper bound for the next iteration depends on whether any feasi-ble or infeasible solution was obtained in the previous iterations. Ifthe current solution is feasible and any infeasible solution has notbeen chosen yet, then the decrease amount on the upper bound forthe next iteration remains the same. If the current solution is fea-sible and an infeasible solution has been chosen before, then thedecrease amount on the upper bound for the next iteration is takenas the half of its previous value. If the current solution is infeasibleand any feasible solution has not been chosen yet, then the in-crease amount on the upper bound for the next iteration remainsthe same. If the current solution is infeasible and a feasible solutionhas been chosen before, then the increase amount on the upperbound for the next iteration is taken as the half of its previous va-lue. This process continues until absolute value of the change in theupper bound is less than a predefined tolerance value. Note that aspecific initial increase/decrease amount for the cost function is se-lected at the beginning of the algorithm. The way of search and theformation of the sharp augmented LaGrange function, which areemployed in the F-MSG algorithm, make finding of the absoluteminimum cost possible once the cost function is non-convex. Tofind the initial bus voltage magnitude and phase angles, an initialtotal cost rate value (being higher than the optimal one), a loadflow calculation is performed with the selected initial unit genera-tions and other quantities at the beginning of the algorithm. No moreload flow calculation is performed in the subsequent stages of theproposed solution process. Since the F-MSG algorithm works withonly the equality constraints, we convert inequality constraintsinto equality constraints using a method which does not add anyextra independent variable into the optimization model and re-duces the solution time because of it.
To our knowledge, the proposed algorithm has not been appliedto the problem considered in this paper so far.
2. Problem formulation
In this section, a nonlinear programming model is proposed forthe economic power dispatch problem as follows:
Min FT ¼Xi2NG
FiðPGiÞ ð1Þ
Subject to
PGi � PLoad;i �Xj2NBi
pij ¼ 0
QGi � Q Load;i �Xj2NBi
qij ¼ 0; i ¼ 1;2; . . . ;Nð2Þ
PminGi 6 PGi 6 Pmax
Gi ; i 2 NG ð3ÞQ min
Gi 6 Q Gi 6 Q maxGi ; i 2 NQ ð4Þ
� pmaxl 6 pl 6 pmax
l ; l 2 L ð5ÞUmin
i 6 Ui 6 Umaxi ; i ¼ 1;2; . . . ;N; i – ref ð6Þ
amini 6 ai 6 amax
i ; i 2 Ntap ð7Þbmin
svari 6 bsvari 6 bmaxsvari; i 2 Nsvar ð8Þ
The meanings of the symbols used in this paper are given in the listof symbols section.
2.1. Determination of line flows and power generations
In order to express the total cost rate function in terms of inde-pendent variables of our optimization model, line flows should bewritten in terms of bus voltage magnitudes and bus voltage phaseangles, off-nominal tap settings, susceptance values of svar sys-tems (see Eqs. (1) and (2)). The following equations give the activeand reactive power flows over the line being connected betweenbuses i and j [16].
pij ¼ U2i
gij
a2i
þ gshi
� �� UiUj
ai½gij cosðdi � djÞ þ bij sinðdi � djÞ� ð9Þ
pji ¼ U2j ðgij þ gshjÞ �
UiUj
ai½gij cosðdj � diÞ þ bij sinðdj � diÞ� ð10Þ
qij ¼ �U2i
bij
a2i
þ bshi
� �� UiUj
ai½gij sinðdi � djÞ � bij cosðdi � djÞ� ð11Þ
qji ¼ �U2j ðbij þ bshiÞ �
UiUj
ai½gij sinðdj � diÞ � bij sinðdj � diÞ� ð12Þ
In the equations above, Ui is the voltage magnitude of bus i, di is thephase angle of bus i, rij + jxij is the series impedance of the line betweenbuses i and j, gij + jbij is the series admittance of the line between busesi and j, where gij + jbij = 1/(rij + jxij), gshi + jbshi = gshi + j(bcapi + bsvari) isthe sum of the half line charging admittance and external shunt sus-ceptance (svar system) if any, and ai is the off-nominal tap settingwith tap setting facility at bus i. pij and qij are the active and reactivepower flows going from bus i to j at bus i border, respectively.�pji and�qji are the active and reactive power flows going from bus i to j at busj border, respectively.
With the help of Eqs. (9)–(12), from Eq. (2), the active and reac-tive power generations of the ith unit (connected to bus i) can becalculated by the following expressions:
PGi ¼ PLoad i þXj2NBi
pij ð13Þ
QGi ¼ Q Load i þXj2NBi
qij ð14Þ
The total loss of the network can be calculated as follows:
ploss ij ¼ pij þ pji ð15ÞPLOSS ¼
Xi2N
Xj2N;j–i
pij ð16Þ
The non-convex cost rate function of the ith unit is taken as
FiðPGiÞ ¼ bi þ ciPGi þ diP2Gi þ ei sin gi Pmin
Gi � PGi
� �� ���� ���; i 2 NG ð17Þ
where bi, ci, di, ei and gi are constant coefficients. The sine term in(17) is added to the cost rate curve to reflect the valve point loadingaffect. The non-convex total cost rate is also determined as:
FT ¼Xi2NG
FiðPGiÞ ðR=hÞ ð18Þ
2.2. Converting inequality constraints into equality constraints
Since the F-MSG algorithm requires all constraints be expressedin equality constraint form, the inequality constraints in the opti-mization model should be converted into corresponding equalityconstraints. The following method is used for this purpose sinceit does not add any extra independent variable (like in the slackvariable approach) into the optimization model and reduces thesolution time because of it [17]. The double sided inequalityx�i 6 xi 6 xþi can be written as the following two inequalities:

852 S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858
hþi ðxiÞ ¼ xi � xþi� �
6 0; h�i ðxiÞ ¼ x�i � xi� �
6 0 ð19Þ
Then we can rewrite the above inequalities as continuous equalityforms as follows:
heqþi ðxiÞ ¼max 0; xi � xþi
� � ; heq�
i ðxiÞ ¼max 0; x�i � xi� �
:
ð20Þ
If x�i 6 xi 6 xþi , it is obvious that xi � xþi� �
6 0; x�i � xi� �
6 0 andmax 0; xi � xþi
� � ¼ 0; max 0; x�i � xi
� � ¼ 0. So, the inequality
constraints in (19) can be represented by the corresponding equal-ity constraints in (20). In this paper, the inequality constraints givenin Eqs. (3)–(8) are converted into the corresponding equality con-straints in this manner.
3. The modified subgradient algorithm based on feasible values
The nonlinear optimization problem described by Eqs. (1)–(20)can be represented in the standard form given below:
Min FTðxÞ
S:t:hðxÞ ¼ 0x 2 K
� ð21Þ
where x ¼ ½U1;U2; . . . ;UN; d1; d2; . . . ; dN; a1; a2 . . . ; antap ; bsvar1; bsvar2;
. . . ; bsvarnsvar � is the independent variable vector consisting of thevoltage magnitudes and phase angles of the buses (except thereference bus), tap settings of the off-nominal tap ratio transform-ers and susceptance values of the svar systems in the network.FT(x) is the objective function that is given in Eq. (18), andhðxÞ ¼ ½h1ðxÞ;h2ðxÞ; . . . ;hnEQ ðxÞ� in (21) is the equality constraint vec-tor. It includes all the original equality constraints which are givenin (2) and the equality constraints, which are obtained from con-verting all the inequality constraints given in (3)–(8) into the corre-sponding equality constraints via the method given in Section 2.2. Kis a sufficiently large compact set containing the potential values ofx. Region K is bounded by the upper and the lower limits of the volt-age magnitudes of the buses and the upper and the lower limits ofthe tap settings of the off nominal tap ratio transformers, and theupper and the lower limits of the susceptance values of svar sys-tems which are given in Eqs. (6)–(8). Note that the voltage magni-tude and phase angle of the reference bus, (Uref,dref), are notincluded into x since they are not independent variables and remainconstant during the solution process. In solving the constrainedoptimization problem given by Eq. (21), the first step is to convertit into unconstrained one by constructing the dual problem. Thiscan be done using various LaGrange functions [18]. LaGrange func-tion must guarantee that the optimal solution of the dual problembe equal to that of the primal constrained problem. Otherwise,there will be a difference between the optimal values of these prob-lems, in other words, a duality gap will occur. Classical LaGrangefunction guarantees the zero duality gaps for the convex problems.However, if the objective function or some of the constraints are notconvex, then the classical LaGrange function cannot guarantee this.Therefore, for the non-convex problems, suitably selected augment-ed LaGrange functions should be used. Considering the non-convexnature of our problem, we form the dual problem using the follow-ing sharp augmented LaGrange function:
Lðx;u; cÞ ¼ FTðxÞ þ ckhðxÞk � hu;hðxÞi
¼ FTðxÞ þ cð½h1ðxÞ�2 þ ½h2ðxÞ�2 þ � � � þ ½hnEQ ðxÞ�2Þ1=2
� ðu1h1ðxÞ þ u2h2ðxÞ þ � � � þ unEQ hnEQ ðxÞÞ ð22Þ
where u1;u2; . . . ;unEQ 2 R and c P 0 are LaGrange multipliers (dualvariables). The dual function associated with the constrained prob-lem is defined as
Hðu; cÞ ¼ Minx2K
Lðx;u; cÞ ð23Þ
Then, the dual problem is given by
Maxðu;cÞ2RNEQ �Rþ
Hðu; cÞ ð24Þ
For the given dual problem, the conditions of guaranteeing zeroduality gaps are proven in [19]. The F-MSG algorithm which was re-cently developed by Kasimbeyli et al. [15] is used to solve the dualproblem given in this paper. It is a generalized version of modifiedsubgradient algorithm [19]. The algorithm having two nested loopsis described in the following section.
3.1. The F-MSG algorithm
Initialization step:Select arbitrary initial active, reactive powergenerations, tap ratios and susceptance values of the svar systems.Then, perform an AC power flow calculation with selected active,reactive power generations and tap ratios and susceptance valuesof svar systems to obtain the initial values for the voltage magni-tudes and phase angles of the buses. Calculate the initial total costrate FT.
Step 1 Choose positive numbers e1, e2, D1 and M (upper bound fork). Set n = 1, p = 0, q = 0, and Hn = FT.
Step 2 Choose un1; c
n1
� �2 RnEQ �Rþ and ‘(1) > 0 and set
k ¼ 1; uk ¼ un1; ck ¼ cn
1;
Step 3 Given (uk,ck), solve the following constraint satisfactionproblem (CSP)
Find a solution xk 2 K such thatFTðxkÞ þ ckkhðxkÞk � huk;hðxkÞi 6 Hn
ð25Þ
If a solution to (25) does not exist or ‘(k) > M, then go to step 6;otherwise, if a solution xk exists then check whether h(xk) = 0. Ifh(xk) = 0 (or if kh(xk)k 6 e1) then go to step 5, otherwise go to step 4.Step 4 . Update dual variables as;
ukþ1 ¼ uk � askhðxkÞ ð26Þckþ1 ¼ ck þ ð1þ aÞskkhðxkÞk ð27Þ
where sk is a positive step size parameter defined as
0 < sk ¼kaðHn � Lðxk;uk; ckÞÞ½a2 þ ð1þ aÞ2�khðxkÞk2 ð28Þ
where a and k are constant parameters with a > 0 and0 < k < 2. Step size sk corresponding to the dual variables(uk,ck) should also satisfy the following property:
ðskkhðxkÞk þ ck � kukkÞ > ‘ðkÞ ð29Þ
Set k = k + 1, update ‘(k) in such a way that ‘(k) ? +1 ask ? +1, and go to step 3.
Step 5 If p = 0, it means that any infeasible total cost rate valuehas not been chosen yet, then set Dn+1 = Dn, otherwiseset Dnþ1 ¼ 1
2 Dn. If Dn+1 < e2, then stop, xk is an approximateoptimal primal solution, and (uk,ck) is an approximate dualsolution; otherwise set Hn+1 = min{FT(xk), Hn � Dn+1},q = q + 1, n = n + 1, and go to step 2.
Step 6 If q = 0, it means that any feasible cost rate value has notbeen chosen yet, then set Dn+1 = Dn, otherwise setDnþ1 ¼ 1
2 Dn. If Dn+1 < e2 then stop, and in this case, the lastcalculated feasible xk is an approximate optimal primalsolution, and (uk,ck) is an approximate dual solution,otherwise, set Hn+1 = Hn + Dn+1, p = p + 1, n = n + 1 and goto step-2.

Table 2Selected four different initial actual generation set and their initial total cost ratevalues for non-convex IEEE 30-bus test system.
Set-1 Set-2 Set-3 Set-4
PG1 (MW) 77.87 103.40 130.52 174.71QG1 (MVAr) 10.45 �18.55 64.03 167.74PG2 (MW) 80.00 60.00 40.00 50.00QG2 (MVAr) 15.00 15.00 5.00 �5.00PG5 (MW) 50.00 45.00 40.00 20.00QG5 (MVAr) 15.00 10.00 5.00 �5.00PG8 (MW) 10.00 15.00 20.00 25.00QG8 (MVAr) 15.00 10.00 10.00 �5.00PG11 (MW) 30.00 30.00 25.00 15.00QG11 (MVAr) 15.00 35.00 10.00 �5.00PG13 (MW) 40.00 35.00 35.00 15.00QG13 (MVAr) 15.00 35.00 5.00 �5.00PLOSS (MW) 4.469 5.003 7.123 16.311FT (R/h) 1122.1558 1060.8892 1019.6718 964.8567
S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858 853
In this algorithm, steps 3 and 4 can be considered as the innerloop, and steps 2, 5 and 6 can be considered as the outer loop. Indi-ces n and k represent the number of performed outer and innerloop iterations, respectively. We call any outer loop, in which a fea-sible cost rate value is generated by the algorithm, as a feasiblestate, nf. The selected total cost rate value Hn is updated in the out-er loop. Step 3 of the inner loop is concerned with finding a solu-tion to the CSP problem for the updated total cost rate value Hn.Different methods can be used to find a solution x to the CSP prob-lem or to show the non-existence of such a solution.
Minimize f ¼ 0
Subject toLðx;u; cÞ � Hn 6 0x 2 K
� ð30Þ
where f is a ‘fictitious’ objective function which is identically zero,or can be taken as any constant value [15].
In the case of where Hn is a feasible value, a solution to the sub-problem given in (30) exists and it will be found at Step 3. Thesolution found at this step of kth iteration may be feasible or infea-sible. The way of updating the dual variables (uk,ck) in step 4 willforce the solution in step 3 to converge to the feasible solution(see theorems in [15]).
Note that, the user chooses a large number M as an upper limitfor the termination of inner iterations at initialization step. If thevalue of ‘(k) exceeds this limit, then this means that no feasiblesolution to the CSP problem exists. If the cost rate Hn is infeasible,then step 6 of outer loop is visited and the value of p is incre-mented. When a feasible total cost rate value is obtained in thealgorithm, the value of q is incremented in step 5 of the outer loop.Therefore, the values of q and p show the total number of feasibleand infeasible total cost rate values, respectively, generated by thealgorithm. Please refer to reference [15] for convergence theoremsand properties of different parameters used in the F-MSGalgorithm.
4. Numeric example
The proposed dispatch technique was tested on non-convex dis-patch problems of IEEE 30-bus and IEEE 57-bus test systems. Theminimum total cost rate and solution time values obtained fromthe proposed dispatch method and those obtained from the othersolution methods, reported in the literature recently, are com-pared, and the outperformance of the proposed solution methodin terms of both the total cost rate and the solution time againstto the other methods is demonstrated. The simulation programwas coded in Matlab 6.1. The CSP problem encountered in step-3of the F-MSG algorithm is solved by GAMS 21.5 with Conopt typesolver. We employed a PC with Intel Core 2 Duo 2.20 GHz CPU and4 GB RAM in solution of the dispatch problems.
4.1. Solving economic non-convex dispatch problem of IEEE 30-bustest system with F-MSG
Please refer to Ref. [5] for the system’s single line diagram, lineand bus data. Bus 1 is chosen as the reference bus, and its pu
Table 1Generator data for IEEE 30-bus test system.
Bus number (i) PmaxGi (MW) Pmin
Gi (MW) QmaxGi (MVAr) Qm
Gi
1 200 50 250 �22 80 20 100 �25 50 15 80 �158 35 10 60 �15
11 30 10 50 �113 40 12 60 �15
complex voltage is taken as 1.05\0 pu. The lower limit of voltagemagnitudes for all busses, except the reference bus, is taken as0.95 pu. The upper limit of voltage magnitudes for all the load bus-ses is chosen as 1.05 pu, while the upper limit for all the generatorbusses is taken as 1.10 pu. The lower and upper limits for all offnominal transformer taps are taken as 0.90 and 1.10, respectively.The parameters that are explained in Section 3.1 are chosen asa = 1500, k = 1, e1 = 1 � 10�5, e2 = 0.05, M = 250, D1 = 50 R/h,c1
1 ¼ 2000; u11 ¼ ½0;0; . . . 0;0�ð1�113Þ, and ‘(k) = k. The same dispatch
problem is solved four times via the F-MSG method by using fourdifferent initial generation sets. The same parameters are used inall solutions. The generator cost rate data is shown in Table 1where sine components are added to the cost rate curves of thegenerating units at bus 1 and 2 to reflect the valve-point loadingeffects (non-convex total cost rate curve), as it is given in Eq.(17). The selected actual initial active and reactive generationschedules for four different initial points are given in Table 2. Toobtain initial cost rate and initial complex bus voltage values foreach initial generation set, a load flow solution is carried out byusing each of them (please see Initialization Step in Section 3.1).The calculated initial total cost rate values for each initial genera-tion set are also shown in Table 2. The initial tap ratio values of theoff nominal tap changing transformers on the lines 11, 12, 15 and36 are taken as 0.978, 0.969, 0.932 and 0.968 respectively. Thesame initial tap values are used for each initial generation set.
The non-convex dispatch problem of IEEE 30 bus test systemwas solved via EP (Evolutionary Programming) [7], TS (TabuSearch) [5], IEP (Improved Evolutionary Programming) [8], DEAand MDEA (Differential Evolution Algorithm and Modified Differ-ential Evolution Algorithm) [9] previously. The optimal total costrate and solution time (ST) values produced by the F-MSG andthe other methods are given in Table 3. We see from the table thatEP and TS give less expensive total cost rate values than those ofgiven by the other methods. However the best solution given in[5] violates the limits of QG1 and the line 1 (from bus 1 to bus 2)loading (infeasible solution). The best solution given in [6] also vio-lates the limit of line 1 loading (infeasible solution) [9]. We see fromTable 3 that the F-MSG method outperforms IEP, DEA and MDEA in
in (MVAr) bi ci di ei gi
0 150.0 2.00 0.0016 50.00 0.06300 25.0 2.50 0.0100 40.00 0.0980
0 1.00 0.06250 0 00 3.25 0.00834 0 0
0 0 3.00 0.02500 0 00 3.00 0.02500 0 0
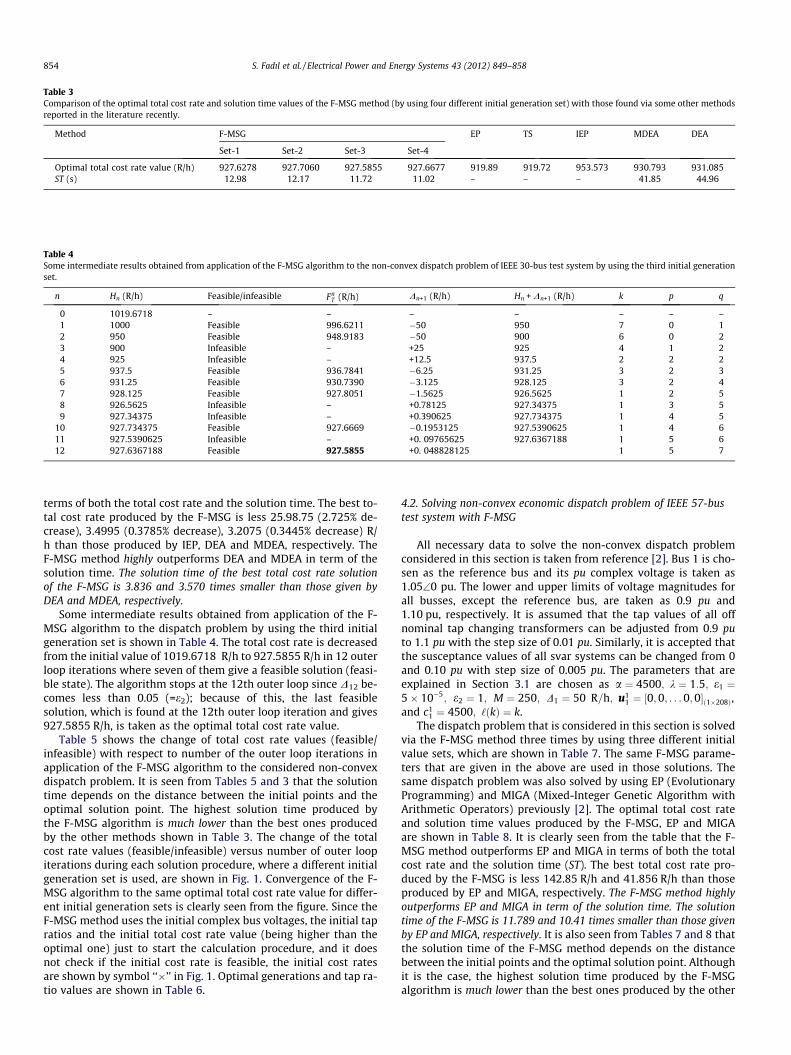
Table 4Some intermediate results obtained from application of the F-MSG algorithm to the non-convex dispatch problem of IEEE 30-bus test system by using the third initial generationset.
n Hn (R/h) Feasible/infeasible FnT (R/h) Dn+1 (R/h) Hn + Dn+1 (R/h) k p q
0 1019.6718 – – – – – – –1 1000 Feasible 996.6211 �50 950 7 0 12 950 Feasible 948.9183 �50 900 6 0 23 900 Infeasible – +25 925 4 1 24 925 Infeasible – +12.5 937.5 2 2 25 937.5 Feasible 936.7841 �6.25 931.25 3 2 36 931.25 Feasible 930.7390 �3.125 928.125 3 2 47 928.125 Feasible 927.8051 �1.5625 926.5625 1 2 58 926.5625 Infeasible – +0.78125 927.34375 1 3 59 927.34375 Infeasible – +0.390625 927.734375 1 4 5
10 927.734375 Feasible 927.6669 �0.1953125 927.5390625 1 4 611 927.5390625 Infeasible – +0. 09765625 927.6367188 1 5 612 927.6367188 Feasible 927.5855 +0. 048828125 1 5 7
Table 3Comparison of the optimal total cost rate and solution time values of the F-MSG method (by using four different initial generation set) with those found via some other methodsreported in the literature recently.
Method F-MSG EP TS IEP MDEA DEA
Set-1 Set-2 Set-3 Set-4
Optimal total cost rate value (R/h) 927.6278 927.7060 927.5855 927.6677 919.89 919.72 953.573 930.793 931.085ST (s) 12.98 12.17 11.72 11.02 – – – 41.85 44.96
854 S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858
terms of both the total cost rate and the solution time. The best to-tal cost rate produced by the F-MSG is less 25.98.75 (2.725% de-crease), 3.4995 (0.3785% decrease), 3.2075 (0.3445% decrease) R/h than those produced by IEP, DEA and MDEA, respectively. TheF-MSG method highly outperforms DEA and MDEA in term of thesolution time. The solution time of the best total cost rate solutionof the F-MSG is 3.836 and 3.570 times smaller than those given byDEA and MDEA, respectively.
Some intermediate results obtained from application of the F-MSG algorithm to the dispatch problem by using the third initialgeneration set is shown in Table 4. The total cost rate is decreasedfrom the initial value of 1019.6718 R/h to 927.5855 R/h in 12 outerloop iterations where seven of them give a feasible solution (feasi-ble state). The algorithm stops at the 12th outer loop since D12 be-comes less than 0.05 (=e2); because of this, the last feasiblesolution, which is found at the 12th outer loop iteration and gives927.5855 R/h, is taken as the optimal total cost rate value.
Table 5 shows the change of total cost rate values (feasible/infeasible) with respect to number of the outer loop iterations inapplication of the F-MSG algorithm to the considered non-convexdispatch problem. It is seen from Tables 5 and 3 that the solutiontime depends on the distance between the initial points and theoptimal solution point. The highest solution time produced bythe F-MSG algorithm is much lower than the best ones producedby the other methods shown in Table 3. The change of the totalcost rate values (feasible/infeasible) versus number of outer loopiterations during each solution procedure, where a different initialgeneration set is used, are shown in Fig. 1. Convergence of the F-MSG algorithm to the same optimal total cost rate value for differ-ent initial generation sets is clearly seen from the figure. Since theF-MSG method uses the initial complex bus voltages, the initial tapratios and the initial total cost rate value (being higher than theoptimal one) just to start the calculation procedure, and it doesnot check if the initial cost rate is feasible, the initial cost ratesare shown by symbol ‘‘�’’ in Fig. 1. Optimal generations and tap ra-tio values are shown in Table 6.
4.2. Solving non-convex economic dispatch problem of IEEE 57-bustest system with F-MSG
All necessary data to solve the non-convex dispatch problemconsidered in this section is taken from reference [2]. Bus 1 is cho-sen as the reference bus and its pu complex voltage is taken as1.05\0 pu. The lower and upper limits of voltage magnitudes forall busses, except the reference bus, are taken as 0.9 pu and1.10 pu, respectively. It is assumed that the tap values of all offnominal tap changing transformers can be adjusted from 0.9 puto 1.1 pu with the step size of 0.01 pu. Similarly, it is accepted thatthe susceptance values of all svar systems can be changed from 0and 0.10 pu with step size of 0.005 pu. The parameters that areexplained in Section 3.1 are chosen as a ¼ 4500; k ¼ 1:5; e1 ¼5� 10�5; e2 ¼ 1; M ¼ 250; D1 ¼ 50 R=h; u1
1 ¼ ½0;0; . . . 0;0�ð1�208Þ,and c1
1 ¼ 4500; ‘ðkÞ ¼ k.The dispatch problem that is considered in this section is solved
via the F-MSG method three times by using three different initialvalue sets, which are shown in Table 7. The same F-MSG parame-ters that are given in the above are used in those solutions. Thesame dispatch problem was also solved by using EP (EvolutionaryProgramming) and MIGA (Mixed-Integer Genetic Algorithm withArithmetic Operators) previously [2]. The optimal total cost rateand solution time values produced by the F-MSG, EP and MIGAare shown in Table 8. It is clearly seen from the table that the F-MSG method outperforms EP and MIGA in terms of both the totalcost rate and the solution time (ST). The best total cost rate pro-duced by the F-MSG is less 142.85 R/h and 41.856 R/h than thoseproduced by EP and MIGA, respectively. The F-MSG method highlyoutperforms EP and MIGA in term of the solution time. The solutiontime of the F-MSG is 11.789 and 10.41 times smaller than those givenby EP and MIGA, respectively. It is also seen from Tables 7 and 8 thatthe solution time of the F-MSG method depends on the distancebetween the initial points and the optimal solution point. Althoughit is the case, the highest solution time produced by the F-MSGalgorithm is much lower than the best ones produced by the other

Tabl
e5
Chan
geof
tota
lcos
tra
teve
rsus
num
ber
ofou
ter
loop
iter
atio
nsfo
rth
efo
urdi
ffer
ent
init
ialp
oint
sin
appl
icat
ion
ofth
eF-
MSG
met
hod
toth
eno
n-co
nvex
disp
atch
prob
lem
ofIE
EE30
-bus
test
syst
em.B
old
num
bers
repr
esen
tfe
asib
leto
tal
cost
rate
valu
es;
bold
and
ital
icnu
mbe
rssh
owth
eop
tim
alto
tal
cost
rate
valu
es.
Ou
ter
loop
iter
atio
nn
um
ber
(n)
01
23
45
67
89
1011
1213
14
Set-
111
22.1
558
1097
.561
310
48.2
185
996.
4312
948.
8215
900
925
936.
7270
930.
9801
927.
7741
926.
5625
927.
3437
592
7.70
5292
7.53
9062
592
7.62
78Se
t-2
1060
.889
210
49.8
638
997.
0205
949.
0153
900
925
936.
8512
930.
7251
927.
9042
926.
5625
927.
3437
592
7.70
6092
7.53
9062
592
7.63
6719
–Se
t-3
1019
.671
899
6.62
1194
8.91
8390
092
593
6.78
4193
0.73
9092
7.80
5192
6.56
2592
7.34
375
927.
6669
927.
5390
625
927.
5855
––
Set-
496
4.85
6794
9.01
9590
092
593
6.68
0193
0.72
5892
7.81
7992
6.56
2592
7.34
375
927.
6677
927.
5390
625
927.
6367
19–
––
Table 6The solution point generations, the total active loss, the solution time, the activepower flow on line 1 (between bus 1 and bus 2), the tap ratio (aline number,(bus�to bus))and the total cost rate values when the solution is started from the three differentinitial points.
Set-1 Set-2 Set-3 Set-4
PG1 (MW) 193.1858 193.0871 193.0883 193.0860QG1 (MVAr) �19.9988 �19.2820 �19.7934 �19.2834PG2 (MW) 42.1122 41.9362 41.8535 41.9378QG2 (MVAr) 14.1729 16.5869 17.7271 16.5907PG5 (MW) 20.7065 20.6575 20.8224 20.6563QG5 (MVAr) 33.8109 29.1394 28.5461 29.1391PG8 (MW) 15.6644 14.7184 14.9624 14.7109QG8 (MVAr) 26.3856 33.4648 33.3832 33.4708PG11 (MW) 10.4604 11.7071 11.3477 11.7057QG11 (MVAr) 26.0545 26.0007 25.8547 26.0020PG13 (MW) 11.9999 12.0000 11.9992 11.9988QG13 (MVAr) 32.5401 26.4289 26.6144 26.4321PLOSS (MW) 10.7447 10.7206 10.7110 10.7206FT (R/h) 927.6278 927.7060 927.5855 927.6677p12 (MW) 130.0003 130.0001 130.0002 129.9997ST (s) 12.98 12.17 11.72 11.02a11,(6�9) 1.012 1.002 0.994 0.992a12,(6�10) 1.003 0.995 1.007 1.011a15,(4�12) 0.997 0.989 0.992 1.003a36,(28�27) 0.990 1.000 0.998 0.995
890
940
990
1040
1090
1140
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
Cos
t rat
e, (R/h)
Numbers of outer loop iterations, n
set 4
set 3
set 2
set 1
solid symbols represent a feasible soltion point
Fig. 1. Change of the total cost rate values (feasible/infeasible) versus number ofouter loop iterations for four different initial points for IEEE 30-bus test system.
S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858 855
methods shown in Table 8. Fig. 2 shows the change of total costrate values (feasible/infeasible) with respect to the number ofouter loop iterations during application of the F-MSG algorithmto the considered non-convex dispatch problem by using three dif-ferent sets of initial values that are given in Table 7. It is clearlyseen from the figure that the F-MSG method converges the sameoptimal total cost rate value when it is started from different initialpoints in the solution space.
Some intermediate results obtained from application of the F-MSG algorithm to the dispatch problem of IEEE 57-bus test systemby using the third set of initial values is shown in Table 10. Thetotal cost rate is decreased from the initial value of15679.1783 R/h to 15419.1433 R/h in nine outer loop iterationswhere six of them give a feasible solution. The algorithm stops atthe 9th outer loop since D9 becomes less than 1.0 (=e2); becauseof this, the last feasible solution, which is found at the 9th outer
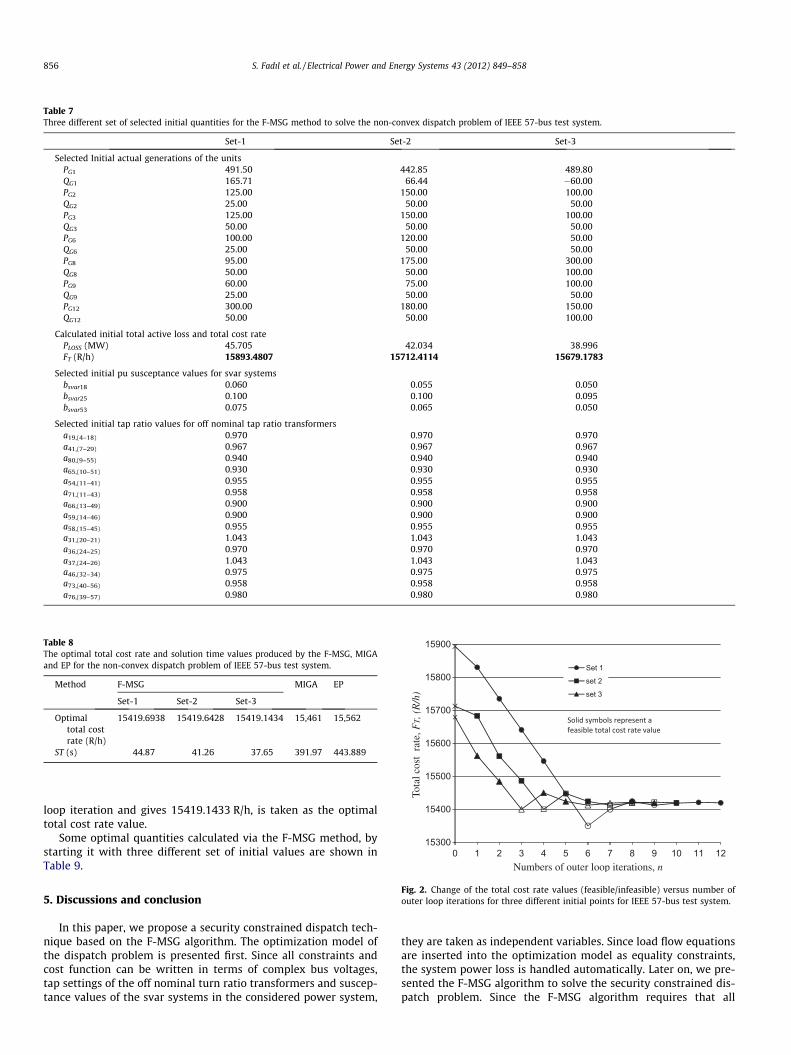
Table 7Three different set of selected initial quantities for the F-MSG method to solve the non-convex dispatch problem of IEEE 57-bus test system.
Set-1 Set-2 Set-3
Selected Initial actual generations of the unitsPG1 491.50 442.85 489.80QG1 165.71 66.44 �60.00PG2 125.00 150.00 100.00QG2 25.00 50.00 50.00PG3 125.00 150.00 100.00QG3 50.00 50.00 50.00PG6 100.00 120.00 50.00QG6 25.00 50.00 50.00PG8 95.00 175.00 300.00QG8 50.00 50.00 100.00PG9 60.00 75.00 100.00QG9 25.00 50.00 50.00PG12 300.00 180.00 150.00QG12 50.00 50.00 100.00
Calculated initial total active loss and total cost ratePLOSS (MW) 45.705 42.034 38.996FT (R/h) 15893.4807 15712.4114 15679.1783
Selected initial pu susceptance values for svar systemsbsvar18 0.060 0.055 0.050bsvar25 0.100 0.100 0.095bsvar53 0.075 0.065 0.050
Selected initial tap ratio values for off nominal tap ratio transformersa19,(4–18) 0.970 0.970 0.970a41,(7–29) 0.967 0.967 0.967a80,(9–55) 0.940 0.940 0.940a65,(10–51) 0.930 0.930 0.930a54,(11–41) 0.955 0.955 0.955a71,(11–43) 0.958 0.958 0.958a66,(13–49) 0.900 0.900 0.900a59,(14–46) 0.900 0.900 0.900a58,(15–45) 0.955 0.955 0.955a31,(20–21) 1.043 1.043 1.043a36,(24–25) 0.970 0.970 0.970a37,(24–26) 1.043 1.043 1.043a46,(32–34) 0.975 0.975 0.975a73,(40–56) 0.958 0.958 0.958a76,(39–57) 0.980 0.980 0.980
15300
15400
15500
15600
15700
15800
15900
0 1 2 3 4 5 6 7 8 9 10 11 12
Tota
l cos
t ra
te, F
T, (
R/h
)
Numbers of outer loop iterations, n
Set 1
set 2
set 3
Table 8The optimal total cost rate and solution time values produced by the F-MSG, MIGAand EP for the non-convex dispatch problem of IEEE 57-bus test system.
Method F-MSG MIGA EP
Set-1 Set-2 Set-3
Optimaltotal costrate (R/h)
15419.6938 15419.6428 15419.1434 15,461 15,562
ST (s) 44.87 41.26 37.65 391.97 443.889
856 S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858
loop iteration and gives 15419.1433 R/h, is taken as the optimaltotal cost rate value.
Some optimal quantities calculated via the F-MSG method, bystarting it with three different set of initial values are shown inTable 9.
Fig. 2. Change of the total cost rate values (feasible/infeasible) versus number ofouter loop iterations for three different initial points for IEEE 57-bus test system.
5. Discussions and conclusionIn this paper, we propose a security constrained dispatch tech-nique based on the F-MSG algorithm. The optimization model ofthe dispatch problem is presented first. Since all constraints andcost function can be written in terms of complex bus voltages,tap settings of the off nominal turn ratio transformers and suscep-tance values of the svar systems in the considered power system,
they are taken as independent variables. Since load flow equationsare inserted into the optimization model as equality constraints,the system power loss is handled automatically. Later on, we pre-sented the F-MSG algorithm to solve the security constrained dis-patch problem. Since the F-MSG algorithm requires that all

Table 10Some intermediate results obtained from the application of the F-MSG algorithm to the non-convex dispatch problem of IEEE 57-bus test system by starting it by the third set ofinitial values.
n Hn (R/h) Feasible/infeasible FnT (R/h) Dn+1 (R/h) Hn + Dn+1 (R/h) k p q
0 15679.1783 – – – – – – –1 15,600 Feasible 15562.2266 �100 15,500 15 0 12 15,500 Feasible 15484.5298 �100 15,400 11 0 23 15,400 Infeasible – +50 15,450 4 1 24 15,450 Feasible 15448.9941 �25 15,425 9 1 35 15,425 Feasible 15423.9541 �12.5 15412.5 7 1 46 15412.5 Infeasible – +6.25 15418.75 2 2 47 15418.75 Infeasible – +3.125 15421.875 2 3 48 15421.875 Feasible 15421.0834 �1.5625 15420.3125 6 3 59 15420.3125 Feasible 15419.1433 �0.78125 3 3 6
Table 9Some optimal quantities calculated via the F-MSG method by starting it with three different set of initial values for the non-convex dispatch problem of IEEE 57-bus test system.
Set-1 Set-2 Set-3
The optimal actual generations of the unitsPG1 391.8561 397.8429 381.3765QG1 40.8989 27.7887 30.8805PG2 81.6542 77.0855 94.7366QG2 60.0001 60.0005 59.9996PG3 117.4110 117.5413 118.0414QG3 60.0000 60.0000 59.9998PG6 50.0017 51.6531 50.2690QG6 �19.7737 �37.8178 18.4618PG8 224.7205 243.7762 240.6676QG8 �19.8591 27.0696 �53.0766PG9 114.6232 90.0401 92.6024QG9 49.9998 �10.2184 34.4224PG12 296.4411 299.9999 299.9963QG12 151.1041 199.9999 175.7354
The solution time, the total active and reactive power loss and the total cost rate values at the optimal solution pointST (s) 44.87 41.26 37.65PLOSS (MW) 25.9083 27.1388 26.9018QLOSS (MVAr) �11.1427 �6.6957 �7.0881FT (R/h) 15419.6938 15419.6428 15419.1434
The optimal pu susceptance values for svar systemsbsvar18 0.020 0.020 0.020bsvar25 0.005 0.005 0.005bsvar53 0.005 0.005 0.005
The optimal tap ratio values for off nominal tap ratio transformersa19,(4–18) 0.98 0.98 1.00a41,(7–29) 0.95 0.95 0.95a80,(9–55) 0.94 0.94 0.93a65,(10–51) 0.95 0.95 0.95a54,(11–41) 0.94 0.94 0.94a71,(11–43) 0.96 0.96 0.96a66,(13–49) 0.92 0.92 0.92a59,(14–46) 0.92 0.92 0.92a58,(15–45) 0.97 0.97 0.97a31,(20–21) 1.02 1.02 1.02a36,(24–25) 0.98 0.98 0.98a37,(24–26) 1.05 1.04 1.05a46,(32–34) 0.98 0.98 0.98a73,(40–56) 0.98 0.97 0.98a76,(39–57) 0.95 0.95 0.95
S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858 857
inequality constraints in the optimization model should be ex-pressed as corresponding equality constraints, the method givenin Section 2.2, which does not introduce any extra independentvariable into the model and reducing the solution time becauseof it, is used for this purpose. In order to supply initial complexbus voltages and a total cost rate value, being higher than the opti-mal one, the F-MSG method needs a load flow solution with the se-lected generations, susceptance values of the svar system and tapsettings just at the beginning of the solution procedure; no moreload flow solution is needed in the subsequent stages. The F-MSGmethod can solve dispatch problems with non-convex total cost
rate curves. This is due to its search method and the formation ofthe augmented sharp Lagrange function used by it. This fact isdemonstrated in the numerical example section where the outper-formance of the F-MSG method against some evolutionary meth-ods, reported in the literature, both in terms of solution time andtotal cost rate value is shown. The convergence of the F-MSG meth-od to the same optimal total cost rate value when it is started fromdifferent initial points in the solution space is demonstrated inboth numerical solutions of Numerical Example section.
We are currently performing research on application of the F-MSG method to some other non-convex economic power dispatch

858 S. Fadıl et al. / Electrical Power and Energy Systems 43 (2012) 849–858
problems such as short-term hydrothermal scheduling problemand pumped-storage hydraulic unit scheduling problem. To ourknowledge, the proposed solution technique has not been appliedto the problem given in this paper.
References
[1] Chiang CL. Genetic-based algorithm for power economic load dispatch. IETGener Transm Distrib 2007;1(2):261–9.
[2] Gaing ZL, Chang RF. Security-constrained optimal power flow by mixed-integer genetic algorithm with arithmetic operators. IEEE power engineeringsociety general meeting; 2006.
[3] Chaturvedi KT, Pandit M, Srivastava L. Particle swarm optimization with timevarying acceleration coefficients for non-convex economic power dispatch. IntJ Electr Power Energy Syst 2009;31:249–57.
[4] Park JB, Jeong YW, Shin JR, Lee KY. An improved particle swarm optimizationfor nonconvex economic dispatch problems. IEEE Trans Power Syst2010;25(1):156–66.
[5] Abido MA. Optimal power flow using Tabu search algorithm. Electr PowerCompon Syst 2002;30:469–83.
[6] Sangiamvibool W, Pothiya WS, Ngamroo I. Multiple Tabu search algorithm foreconomic dispatch problem considering valve-point effects. Int J Electr PowerEnergy Syst 2011;33:846–54.
[7] Yuryevich J, Wong KP. Evolutionary programming based optimal power flowalgorithm. IEEE Trans Power Syst 1999;14(4):1245–50.
[8] Ongsakul W, Tantimaporn T. Optimal power flow by improved evolutionaryprogramming. Electr Power Compon Syst 2006;34(1):79–95.
[9] Sayah S, Zehar K. Modified differential evolution algorithm for optimal powerflow with non-smooth cost functions. Energy Convers Manage2008;49:3036–42.
[10] Amjady N, Sharifzadeh H. Solution of non-convex economic dispatch problemconsidering valve loading effect by a new modified differential evolutionalgorithm. Int J Electr Power Energy Syst 2010;32:893–903.
[11] Fadil S, Sarioglu GR. An active and reactive power dispatch technique usingpseudo spot price of electricity. Electr Mach Power Syst 1998;26(4):87–95.
[12] Farhat IA, El-Hawary ME. Interior point methods application in optimumoperational scheduling of electric power systems. IET Gener Transm Distrib2009;3(11):1020–9.
[13] Vlachogiannis JG, Lee KY. Quantum-inspired evolutionary algorithm for realand reactive power dispatch. IEEE Trans Power Syst 2008;23(4):1627–36.
[14] Somasundaram P, Lakshmiramanan R, Kuppusamy K. Hybrid algorithm basedon EP and LP for security constrained economic dispatch problem. ElectrPower Syst Res 2005;76:77–85.
[15] Kasimbeyli R, Ustun O, Rubinov AM. The modified subgradient algorithmbased on feasible values. Optimization 2009;58(5):535–60.
[16] Jegatheesan R, Nor NM, Romlie MF. Newton-Raphson power flow solutionemploying systematically constructed Jacobian matrix. In: 2nd IEEEinternational conference on power and energy; 2008. p. 180–5.
[17] Burachik RS, Gasimov N, Ismayilova NA, Kaya CY. On a modified subgradientalgorithm for dual problems via sharp augmented Lagrangian. J Global Optim2006;34:55–78.
[18] Rubinov AM, Gasimov RN. The nonlinear and augmented Lagrangians fornonconvex optimization problems with a single constraint. Appl Comput Math2002;1:142–57.
[19] Gasimov RN. Augmented Lagrangian duality and nondifferentiableoptimization methods in nonconvex programming. J Global Optim2002;24:187–203.