a system of linear equations is a set of linear equations ...d00922011/matlab/282/20170624.pdf ·...
TRANSCRIPT
System of Linear Equations
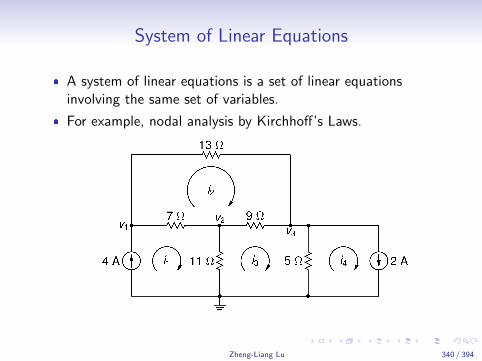
� A system of linear equations is a set of linear equationsinvolving the same set of variables.
� For example, nodal analysis by Kirchhoff’s Laws.
Zheng-Liang Lu 340 / 394

� A general system of m linear equations with n unknowns canbe written as
a11x1 +a12x2 · · · +a1nxn = b1a21x1 +a22x2 · · · +a2nxn = b2
......
. . .... =
...am1x1 +am2x2 · · · +amnxn = bm
where x1, . . . , xn are unknowns, a11, . . . , amn are thecoefficients of the system, and b1, . . . , bm are the constantterms.
Zheng-Liang Lu 341 / 394
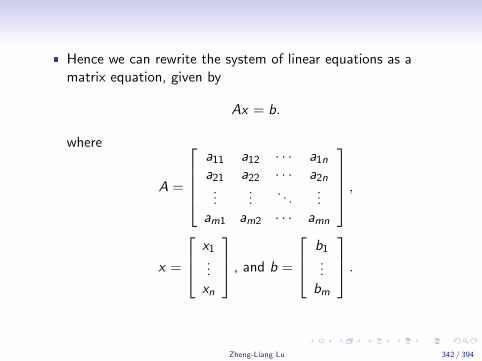
� Hence we can rewrite the system of linear equations as amatrix equation, given by
Ax = b.
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
......
. . ....
am1 am2 · · · amn
,
x =
x1...xn
, and b =
b1...bm
.
Zheng-Liang Lu 342 / 394

Solving General System of Linear Equations
� Let x be the column vector with n independent variables andm constraints.1
� If m = n, then there exists the unique solution.2
� If m > n, then there is no exact solution.� Fortunately, we can find a least-squares error solution such
that ‖Ax ′ − b‖2 is minimal. (See the next page.)
� If m < n, then there are infinitely many solutions.
� We can calculate the inverse by simply using the left matrixdivide operator (\) or mldivide like this:
x = A\b.
1Assume that they are linearly independent.2Equivalently, rank(A) = rank([A, b]). Also see Cramer’s rule.
Zheng-Liang Lu 343 / 394

Unique Solution (m = n)
� For example, 3x +2y −z = 1x −y +2z = −1−2x +y −2z = 0
1 >> A = [3 2 -1; 1 -1 2; -2 1 -2];2 >> b = [1; -1; 0];3 >> x = A \ b4
5 16 -27 -2
Zheng-Liang Lu 344 / 394
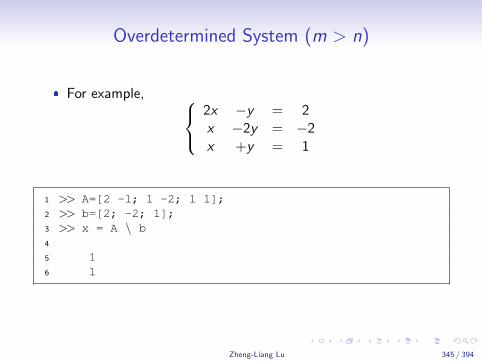
Overdetermined System (m > n)
� For example, 2x −y = 2x −2y = −2x +y = 1
1 >> A=[2 -1; 1 -2; 1 1];2 >> b=[2; -2; 1];3 >> x = A \ b4
5 16 1
Zheng-Liang Lu 345 / 394

Underdetermined System (m < n)� For example, {
x +2y +3z = 74x +5y +6z = 8
1 >> A = [1 2 3; 4 5 6];2 >> b = [7; 8];3 >> x = A \ b4
5 -36 07 3.3338
9 % (Why?)
� Note that this solution is a basic solution, one of infinitelymany.
� How to find the directional vector?Zheng-Liang Lu 346 / 394

Gaussian Elimination
� Recall the procedure of Gaussian Elimination in high school.
� Now we proceed to write a program which solves the followingsimultaneous equations:
3x +2y −z = 1x −y +2z = −1
−2x +y −2z = 0
� Then we have x = 1, y = −2, and z = −2.
Zheng-Liang Lu 347 / 394

� Suppose det(A) 6= 0.
� Form an upper triangular matrix
A =
1 a12 · · · a1n0 1 · · · a2n...
... 1...
0 0 · · · 1
with b =
b1b2...bn
,where aijs and bi s are the values after math.
� Use a backward substitution to determine the solution vectorx by
xi = bi −n∑
j=i+1
aijxj ,
where i = 1, 2, · · · , n.
Zheng-Liang Lu 348 / 394
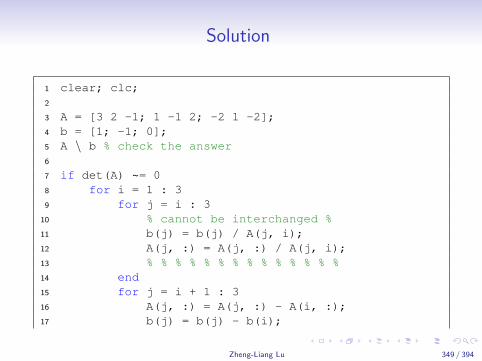
Solution
1 clear; clc;2
3 A = [3 2 -1; 1 -1 2; -2 1 -2];4 b = [1; -1; 0];5 A \ b % check the answer6
7 if det(A) ~= 08 for i = 1 : 39 for j = i : 3
10 % cannot be interchanged %11 b(j) = b(j) / A(j, i);12 A(j, :) = A(j, :) / A(j, i);13 % % % % % % % % % % % % % %14 end15 for j = i + 1 : 316 A(j, :) = A(j, :) - A(i, :);17 b(j) = b(j) - b(i);
Zheng-Liang Lu 349 / 394

18 end19 end20 x = zeros(3, 1);21 for i = 3 : -1 : 122 x(i) = b(i);23 for j = i + 1 : 1 : 324 x(i) = x(i) - A(i, j) * x(j);25 end26 end27 else28 disp('No unique solution.');29 end30 x
Zheng-Liang Lu 350 / 394

Exercise
� Write a program which solves a general system of linearequations.
� The function rank(A) provides an estimate of the number oflinearly independent rows or columns of A.3
� Check if rank(A) = rank([A, b]).� If so, then there is at least one solution.� If not, then there is no solution.
� The function rref([A, b]) produces the reduced row echelonform of A.
3rank(A) ≤ min{r , c} where r and c are the numbers of rows and columns.Zheng-Liang Lu 351 / 394

Zheng-Liang Lu 352 / 394

Solution
1 function y = linearSolver(A, b)2
3 if rank(A) == rank([A, b]) % argumented matrix4 if rank(A) == size(A, 2);5 disp('Exact one solution.')6 x = A \ b7 else8 disp('Infinite numbers of solutions.')9 rref([A b])
10 end11 else12 disp('There is no solution. (Only least ...
square solutions.)')13 end
Zheng-Liang Lu 353 / 394

Example: 2D Laplace’s Equation for Electrostatics
� Laplace’s equation4 is one of 2nd-order partial differentialequations (PDEs).5
� Let Φ(x , y) be an electrical potential, which is a function ofx , y ∈ R.
� Consider∇2Φ(x , y) = 0,
where ∇2 = ∂2
∂x2+ ∂2
∂y2 is the Laplace operator.
� Solving Laplace’s equation in practical applications oftenrequires numerical methods.
4Pierre-Simon Laplace (1749–1827).5See
https://en.wikipedia.org/wiki/Partial_differential_equation.Zheng-Liang Lu 354 / 394

Rectangular Trough
Zheng-Liang Lu 355 / 394

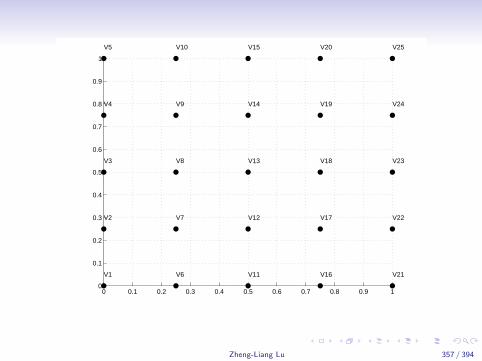
Extremely Simple Assumption
� First, we can partition the region into many subregions by aproper mesh generation.
� If Φ(x , y) satisfies the Laplace’s equation, then Φ(x , y) can beapproximated by
Φ(x , y) ≈ Φ(x + ε, y) + Φ(x − ε, y) + Φ(x , y + ε) + Φ(x , y − ε)4
,
where ε is a small distance compared with the system size.
Zheng-Liang Lu 356 / 394
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
V1
V2
V3
V4
V5
V6
V7
V8
V9
V10
V11
V12
V13
V14
V15
V16
V17
V18
V19
V20
V21
V22
V23
V24
V25
Zheng-Liang Lu 357 / 394

Reformulation
� Consider the boundary condition:� V1 = V2 = · · · = V4 = 0� V21 = V22 = · · · = V24 = 0� V1 = V6 = · · · = V16 = 0� V5 = V10 = · · · = V25 = 100
� Now define
x =[V7 V8 V9 V12 V13 V14 V17 V18 V19
]Twhere T is the transposition operator.
Zheng-Liang Lu 358 / 394

� Then we form Ax = b where
A =
4 −1 0 −1 0 0 0 0 0−1 4 −1 0 −1 0 0 0 00 −1 4 0 0 −1 0 0 0−1 0 0 4 −1 0 −1 0 00 −1 0 −1 4 −1 0 −1 00 0 −1 0 −1 4 −1 0 −10 0 0 −1 0 0 4 −1 00 0 0 0 −1 0 −1 4 −10 0 0 0 0 −1 0 −1 4
and
b =[
0 0 100 0 0 100 0 0 100]T.
� As you can see that V7 = V17,V8 = V18 and V9 = V19 due tothe spatial symmetry, the dimension of A can be reduced to 6!(Try.)
Zheng-Liang Lu 359 / 394

1 clear; clc; close all;2
3 a = 1; b = 1; n = 5; V0 = 100;4
5 x = linspace(0, a, 5);6 y = linspace(0, b, 5);7 [X Y] = meshgrid(x, y);8
9 figure; hold on; grid on;10 plot(X, Y, 'k.', 'markersize', 24);11 for i = 1 : length(x)12 for j = 1 : length(y)13 text(X(n * (i - 1) + j), Y(n * (i - 1) + ...
j) + 0.05, sprintf('V%d', n * (i - 1) ...+ j));
14 end15 end16
17 % boundary condition
Zheng-Liang Lu 360 / 394
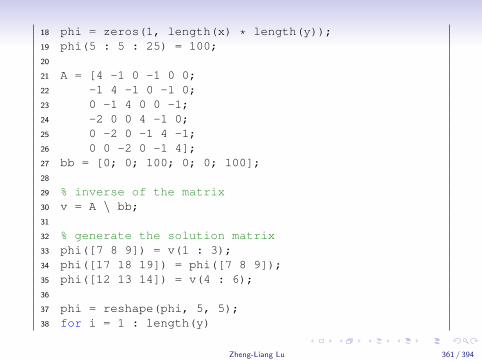
18 phi = zeros(1, length(x) * length(y));19 phi(5 : 5 : 25) = 100;20
21 A = [4 -1 0 -1 0 0;22 -1 4 -1 0 -1 0;23 0 -1 4 0 0 -1;24 -2 0 0 4 -1 0;25 0 -2 0 -1 4 -1;26 0 0 -2 0 -1 4];27 bb = [0; 0; 100; 0; 0; 100];28
29 % inverse of the matrix30 v = A \ bb;31
32 % generate the solution matrix33 phi([7 8 9]) = v(1 : 3);34 phi([17 18 19]) = phi([7 8 9]);35 phi([12 13 14]) = v(4 : 6);36
37 phi = reshape(phi, 5, 5);38 for i = 1 : length(y)
Zheng-Liang Lu 361 / 394

39 for j = 1 : length(x)40 h = text(X(n * (i - 1) + j), Y(n * (i - ...
1) + j) - 0.05, sprintf('%7.4f', ...phi(j, i)));
41 set(h, 'color', 'r');42 end43 end44
45 figure; hold on; grid on;46 contour(X, Y, phi); colorbar;
� This is a toy example for numerical methods.
� You may consider Finite Difference Method (FDM) and FiniteElement Method (FEM), both widely used in commercialsimulation softwares!6
� Besides, the mesh generation is also important for numericalmethods.7
6Read http://www.macs.hw.ac.uk/~ms713/lecture_1.pdf.7See https://en.wikipedia.org/wiki/Mesh_generation.
Zheng-Liang Lu 362 / 394

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
10
1010
10
10
20
20
20
2030
3030
3040
40 40
4050
50 50
5060
60 60
70
70 70
80 8080
90 9090
100 100 100
10
20
30
40
50
60
70
80
90
100
Zheng-Liang Lu 363 / 394
Method of Least Squares
� The first clear and concise exposition of the method of leastsquares was published by Legendre in 1805.
� In 1809, Gauss published his method of calculating the orbitsof celestial bodies.
� The method of least squares is a standard approach to theapproximate solution of overdetermined systems, that is, setsof equations in which there are more equations thanunknowns.8
� To obtain the coefficient estimates, the least-squares methodminimizes the summed square of residuals.
8Aka degrees of freedom.Zheng-Liang Lu 364 / 394

� Let {yi}ni=1 be the observed response values and {yi}ni=1 bethe fitted response values.
� Let εi = yi − yi be the residual for i = 1, . . . , n.
� Then the sum of square error estimates associated with thedata is given by
S =n∑
i=1
ε2i .
Zheng-Liang Lu 365 / 394

Illustration
Zheng-Liang Lu 366 / 394

Linear Least Squares
� In the sense of linear least squares, a linear model is said to bean equation which is linear in the coefficients.
� Now we choose a linear equation,
y = ax + b,
where a and b are to be determined.
� So εi = (axi + b)− yi and then
S =n∑
i=1
((axi + b)− yi )2.
� The coefficient a and b can be determined by differentiating Swith respect to each parameter, and setting the result equalto zero. (Why?)
Zheng-Liang Lu 367 / 394
� More explicitly,
∂S
∂a=− 2
n∑i=1
xi (yi − (axi + b)) = 0,
∂S
∂b=− 2
n∑i=1
(yi − (axi + b)) = 0.
� So the aforesaid equations are reorganized as
an∑
i=1
x2i + bn∑
i=1
xi =n∑
i=1
xiyi ,
an∑
i=1
xi + nb =n∑
i=1
yi .
Zheng-Liang Lu 368 / 394

� In form of matrices,[ ∑ni=1 x
2i
∑ni=1 xi∑n
i=1 xi n
] [ab
]=
[ ∑ni=1 xiyi∑ni=1 yi
].
� So we have
a =n∑n
i=1 xiyi −∑n
i=1 xi∑n
i=1 yin∑n
i=1 x2i − (
∑ni=1 xi )
2=
cov(x , y)
cov(x),
where cov(x , y) denotes the covariance between x = {xi}ni=1
and y = {yi}ni=1.
� Then we have
b =1
n(
n∑i=1
yi − an∑
i=1
xi ).
Zheng-Liang Lu 369 / 394

Example: Circle Fitting
� Consider a set of data points surrounding some center.
� Now the coordinates of the circle center and also the radiusare desired.
� This needs to estimate 3 unknowns: (xc , yc) and r > 0.
� Recall that a circle equation is (x − xc)2 + (y − yc)2 = r2.
� The above equation can be equivalent to
2xxc + 2yyc + z = x2 + y2,
wherez = r2 − x2c + y2c .
Zheng-Liang Lu 370 / 394

� For a set of data points (xi , yi ), i = 1, 2, 3, . . . ,N, thisrearranged equation can be written in matrix form
Aw = b,
where
A =
2x1 2y1 1...
. . ....
2xN 2yN 1
,w =
xcycz
, b =
x21 + y21
...x2N + y2N
.
Zheng-Liang Lu 371 / 394

1 clear; clc; close all;2
3 N = 100;4 theta = 2 * pi * rand(1, N);5 xcc = 5;6 ycc = 3;7 rcc = 10;8
9 x = xcc + rcc * cos(theta) + randn(1, N) * 0.5;10 y = ycc + rcc * sin(theta) + randn(1, N) * 0.5;11
12 xt = x - mean(x);13 yt = y - mean(y);14 distance = sqrt(xt .ˆ 2 + yt .ˆ 2)15 maxR = max(distance);16
17 xt = xt / maxR;18 yt = yt / maxR;19 distance = distance / maxR;
Zheng-Liang Lu 372 / 394

20
21 A = [2 * xt', 2 * yt', ones(N, 1)];22 b = (distance .ˆ 2)';23
24 % v = [xc; yc; z]25 v = A \ b26 r = sqrt(v(3) + v(1) ˆ 2 + v(2) ˆ 2) * maxR27 xc = v(1) * maxR + mean(x)28 yc = v(2) * maxR + mean(y)29
30 figure; plot(x, y, 'o');31 hold on; grid on; axis equal;32
33 theta = linspace(0, 2 * pi, 100);34 x = xc + r * cos(theta );35 y = yc + r * sin(theta );36 plot(x , y , 'r-');
Zheng-Liang Lu 373 / 394

−5 0 5 10 15
−6
−4
−2
0
2
4
6
8
10
12
Zheng-Liang Lu 374 / 394

Polynomials9
� In fact, all polynomials of n-th order with addition andmultiplication to scalars form a vector space, denoted by Pn.
� In general, f (x) is said to be a polynomial of n-order providedthat
f (x) = anxn + an−1x
n−1 + · · ·+ a0,
where an 6= 0.
� It is convenient to express a polynomial by a coefficient vector(an, an−1, . . . , a0), where the elements are the coefficients ofthe polynomial in descending order.
9Weierstrass approximation theorem states that every continuous functiondefined on a closed interval [a, b] can be uniformly approximated as closely asdesired by a polynomial function. Seehttps://en.wikipedia.org/wiki/Stone_Weierstrass_theorem.
Zheng-Liang Lu 375 / 394
Arithmetic Operations
� P1 + P2 returns the addition of two polynomials.
� P1 − P2 returns the subtraction of two polynomials.
� The function conv(P1,P2) returns the resulting coefficientvector for multiplication of the two polynomials P1 and P2.10
� The function [Q,R] = deconv(B,A) deconvolves vector Aout of vector B.
� Equivalently, B = conv(A,Q) + R.� This is so-called “Euclidean division algorithm.”
� The function polyval(P,X ) returns the values of a polynomialP evaluated at x ∈ X .
10See Convolution.Zheng-Liang Lu 376 / 394

1 clear; clc;2
3 p1 = [1 -2 -7 4];4 p2 = [2 -1 0 6];5 %%% addition6 p3 = p1 + p27 %%% substraction8 p4 = p1 - p29 %%% multiplcaition
10 p5 = conv(p1, p2)11 %%% division: q is quotient and r is remainder12 [q, r] = deconv(p1, p2)13 x = -1 : 0.1 : 1;14 plot(x, polyval(p1, x), 'o', x, polyval(p2, x), ...
'*', x, polyval(p5, x), 'd');15 grid on; legend('p1', 'p2', 'conv(p1, p2)');
Zheng-Liang Lu 377 / 394

−1 −0.5 0 0.5 1
−20
−10
0
10
20
30
p1p2conv(p1,p2)
Zheng-Liang Lu 378 / 394
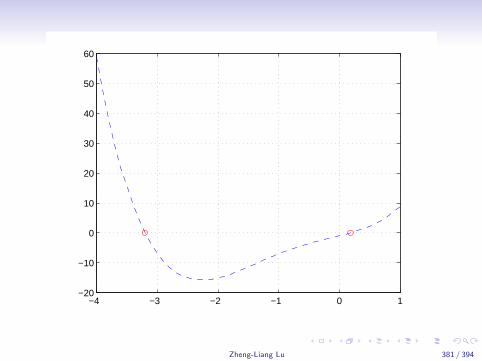
Roots Finding
� The function roots(P) returns a vector whose elements are allroots of the polynomial P.11
� For example,
1 clear; clc;2
3 p = [1, 3, 1, 5, -1];4 r = roots(p)5 x = -4 : 0.1 : 1;6 plot(x, polyval(p, x), '--'); hold on; grid on;7 for i = 1 : length(r)8 if isreal(r(i)) == 19 plot(r, polyval(p, r(i)), 'ro');
10 end11 end12 polyval(p, r)
11See https://en.wikipedia.org/wiki/Jenkins-Traub_algorithm.Zheng-Liang Lu 379 / 394

1 >> r =2
3 -3.20514 0.0082 + 1.2862i5 0.0082 - 1.2862i6 0.18867
8 >> ans =9
10 1.0e-013 *11
12 0.404113 -0.0133 + 0.0529i14 -0.0133 - 0.0529i15 0
� Why not exactly zero?
Zheng-Liang Lu 380 / 394
−4 −3 −2 −1 0 1−20
−10
0
10
20
30
40
50
60
Zheng-Liang Lu 381 / 394

Exercise: Internal Rate of Return (IRR)
� Given a collection of pairs (time, cash flow) involved in aproject, the IRR is a rate of return when the net present valueis zero.
� Explicitly, the IRR can be calculated by solving
N∑n=0
Cn
(1 + r)n= 0,
where Cn is the cash flow at time n.
� For example, consider an investment may be given by thesequence of cash flows:
C0 = −123400,C1 = 36200,C2 = 54800,C3 = 48100.
� Then the IRR is 5.96%.
Zheng-Liang Lu 382 / 394
Forming Polynomials
� The function poly(V ), where V is a vector, returns a vectorwhose elements are the coefficients of the polynomial whoseroots are the elements of V .
� Simply put, the function roots and poly are inverse functionsof each other.
Zheng-Liang Lu 383 / 394

Example
1 clear; clc;2
3 v = [0.5 sqrt(2) 3];4 y = 1;5 for i = 1 : 36 y = conv(y, [1 -v(i)]);7 end8 y9
10 poly(v)
Zheng-Liang Lu 384 / 394

Integral and Derivative of Polynomials
� The function polyder(P) returns the derivative of thepolynomial whose coefficients are the elements of vector P indescending powers.
� The function polyint(P,K ) returns a polynomial representingthe integral of polynomial P, using a scalar constant ofintegration K .
1 clear; clc;2
3 p = [4 3 2 1];4 p der = polyder(p)5 p int = polyint(p, 0) % assume K = 0
Zheng-Liang Lu 385 / 394

Exercise
� Consider f (x) = 4x3 + 3x2 + 2x + 1 for x ∈ R.
� Determine the coefficients of its derivative f ′ and integrationF (x) =
∫ x0 f (t)dt.
� Do not use the built-in functions.
Zheng-Liang Lu 386 / 394

1 clear; clc;2
3 p = [4 3 2 1];4 K = 0;5 q1 = zeros(1, length(p));6 for i = 2 : length(p) - 17 q1(i) = p(i - 1) * (length(p) - (i - 1));8 end9 q1
10
11 q2 = zeros(1, length(p) + 1);12 q2(length(q2)) = K;13 for i = 1 : length(p)14 q2(i) = 1 / (length(p) - i + 1) * p(i);15 end16 q2
Zheng-Liang Lu 387 / 394

Curve Fitting by Polynomials
� The function polyfit(x , y , n) returns the coefficients for apolynomial p(x) of degree n that is a best fit (in aleast-squares sense) for the data in y .
Zheng-Liang Lu 388 / 394

Example
1 clear; clc; close all;2
3 x = linspace(0, 1, 10);4 y = cos(rand(1, length(x)) * pi / 2) + x .ˆ 2;5 figure; hold on; grid on; plot(x, y, 'o');6
7 color = 'rgbck';8 x = linspace(0, 1, 100);9 for i = 1 : 5
10 p = polyfit(x, y, i);11 plot(x , polyval(p, x ), color(i));12 end13 p14
15 A = [x' .ˆ 5, x' .ˆ 4, x' .ˆ 3, x' .ˆ 2, x' .ˆ 1, ...ones(10, 1)];
16 b = y';17 pp = A \ b
Zheng-Liang Lu 389 / 394

Overfitting
Zheng-Liang Lu 390 / 394

Occam’s Razor
“Entities must not be multiplied beyond necessity.”– Duns Scotus
� In science, Occam’s razor is used as a heuristic to guidescientists in developing theoretical models rather than as anarbiter between published models.
� Among competing hypotheses, the one with the fewestassumptions should be selected.
� For example, Runge’s phenomenon is a problem of oscillationat the edges of an interval that occurs when using polynomialinterpolation with polynomials of high degree over a set ofequispaced interpolation points.12
12See https://en.wikipedia.org/wiki/Runge’s_phenomenon.Zheng-Liang Lu 391 / 394
Eigenvalues and Eigenvectors13
� Let A be a square matrix.
� Then v is an eigenvector associated with the eigenvalue λ if
Av = λv .
� Equivalently,(A− λI )v = 0.
� For nontrivial vectors v , det(A− λI ) = 0.
� The above equation is the so-called characteristic polynomial,whose roots are actually eigenvalues!
� Use eig(A) to derive the eigenvalues associated witheigenvectors for the matrix A.
13See https://en.wikipedia.org/wiki/Eigenvalues_and_
eigenvectors#Applications.Zheng-Liang Lu 392 / 394
Singular Value Decomposition (SVD)14
� Let Am×n be a matrix.
� Then σ is called one singular value associated with thesingular vectors u ∈ Rm×1 and v ∈ Rn×1 for A provided that{
Av = σu,ATu = σv .
� We further have {AV = UΣ,ATU = VΣ,
where U and V are both unitary, and the diagonal terms in Σare σ’s, 0’s in off-diagonal terms.
� You may use the built-in function svd.
14Seehttps://www.mathworks.com/help/matlab/math/singular-values.html.
Zheng-Liang Lu 393 / 394

Example: Low-rank Approximation for Image Compression
� This idea originates from Principal Component Analysis(PCA).15
� Use svd to calculate the principal components of the inputimage.
� Then we can have an image extremely similar to the originone, but with a smaller image size by keeping the vectorsassociated with a few first largest of principal components.
15See https://www.cs.princeton.edu/picasso/mats/
PCA-Tutorial-Intuition_jp.pdf andhttp://setosa.io/ev/principal-component-analysis/.
Zheng-Liang Lu 394 / 394