a troubled bridge over water?
TRANSCRIPT
9552002
007
"A troubled bridge over water?"Meting van rijgedrag op de gerenoveerde Zeelandbrug
Scriptie van het afstudeerproject, vakgroep experimentele en arbeidspsychotogie,Rijksuniversiteit Groningen
Voorwoord
De scriptie van m'n afstudeerproject 'meting van rijgedrag op de gerenoveerde
Zeelandbrug' is bij deze voltooid. Aangezien ik dit nooit alteen had kunnen doen (ik ben
nametijk nóg student), wil ik de volgende mensen bedanken.
Als eerste wit 1k natuurlijk m'n stagebegeleider Frank Steyvers en mentor Karel
Brookhuis hartetijk danken voor hun tijd, inzet en moeite bij het mede tot stand laten
komen van het uitgevoerde onderzoek en dit bijbehorend versiag. Het personeel van het
Audiovisueel Centrum van de Rijksuniversiteit Groningen en met name Jan Veeman wit
ik bedanken voor de huip bij het monteren van de camera (en de gezellige reis naar
Zeetand). Dankzij het personeel van de Provinciale Onderhoudsdienst van de
Zeelandbrug zijn we naar de constructie gebracht, zijn de banden verwisseld, de
weersomstandigheden bijgehouden en is betangrijke informatie opgestuurd, bedankt.
Verder wit ik dhr. Rothengatter bedanken voor het vinden van een relevant artikel en
bedank 1k Maaike omdat ze vaak om negen uur 's ochtends een bakje koffie met me
wilde drinken. M'n vrienden wit ik hartetijk bedanken voor hun gezetschap van de
afgelopen maanden. Bedankt, Yvonne dat je het drie weken met me hebt uitgehouden in
een stacaravan van zeven vierkante meter, waar ik aan de Franse Riviera aan m'n scriptie
heb gewerkt.
Pap en mam, dit versiag en de but van 27 september heb ik grotendeels aan jullie te
danken. Mijn dank is erg groot.
Meting van rijgedrag op de gerenoveerde Zeelandbrug
Samenvatting
In het jaar 2000 is er een renovatie geweest van de Zeelandbrug. Aangezien er eerst
sprake van zou zijn dat de wegbreedte kleiner zou worden in verband met nieuwe
betonnen barriers, heeft de provincie Zeeland de Rijksuniversiteit Groningen gevraagd
om onderzoek te doen naar veilige wegbreedtes. Hierbij is videomatenaal geanalyseerd
van het verkeer rijdend over de ruim vijf kilometer lange Zeelandbrug van de
oorspronkelijke indeling en drie altematieven met leuning.
Naar aanleiding van de gedane aanbevelingen van de universiteit, heeft de provincie
Zeeland de volgende aanbevelingen meegenomen in de renovatie: breng een dubbele
doorgetrokken streep aan op de wegas, probeer de njstroken zo breed mogelijk te maken
en zorg voor akoestische belijning. De opnamen van het verkeer rijdend over de
Zeelandbrug voor de huidige voormeting zijn gemaakt in het vootjaar van 2002 met
behuip van een camera aan de zijkant van de weg. Deze videofragmenten zijn
geanalyseerd en vervolgens vergeleken met de hiervoor genoemde beschikbare analyses
van verschillende indelingsvarianten met de oude leuning op de Zeelandbrug en met de
gegevens uit de rijsimulator. De tweede nameting (camera boven het wegdek, als in de
voormeting) zal in het najaar van 2002 plaatsvinden.
Naar aanleiding van de vooronderzoeken en de gevonden literatuur is de volgende
hypothese opgesteld: ten opzichte van de oude situatie, zullen nu minder
lijnoverschrijdingen plaatsvinden, wat de veiligheid op de brug vergroot.
Uit dit eerste deel van de nameting kan worden opgemaakt dat ten opzichte van de
oude situatie het verkeer beter tussen de belijning is gaan rijden. Verder is het veiliger
dan vroeger om over de Zeelandbrug te rijden door onder andere een enorme reductie van
het aantal inhaalmanoeuvres op de brug en door minder slingergedrag door met name
bussen en vrachtwagens bij tegenliggers ten opzichte van de oude brug, waardoor de kans
op ongevallen met vrachtwagens en bussen kleiner is.
Echter de invloed van de onderhoudsconstructie op het fietspad brengt wel met zich
mee dat het verkeer op de linker (westelijke) njstrook meer tegen de wegas aanrijdt. Als
gevolg van perspectiefvertekening wat komt door de positie van de camera aan de zijkant
in plaats van boven de weg, is het tweede deel van de nameting noodzakelijk, waarbij de
camera wel recht boven het midden van de rijbaan kan geplaatst worden.
Meting van rijgedrag op de gerenoveerde Zeelandbrug
1. Inleiding 1
1.1 Vooronderzoeken____________________________________________________ 1
1.2DoeI 3
1.3Derijtaak 3
1.4 Taakanalyse van het njden over de Zeelandbrug____________________________ 7
1.5 Koershouden 9
1.6 Koershouden tussen belijning
__________________________________________
11
1.6.1 Invloed van markerings- of ooghoogte op koershouden tussen belijning____ 13
1.7 Koershouden tussen tegenliggers en de barrier
___________________________
13
1.8 Invloed van zijwind en zicht op koershouden
___________________________
15
1.9 Hypothese 16
2. Methode 16
2.1 Onderzoeksopzet
________________________________________________
16
2.2 Metingen 18
3. Resultaten 22
3.1 Inleiding 22
3.2 Laterale positie 223.2.1 Laterale positie - personenauto's__________________________________ 243.2.2 Laterale positie - bussen en vrachtauto's______________________________ 273.2.3 Laterale positie - overzicht
___________________________________________
313.2.4 Laterale positie - zijwind_____________________________________________ 34
3.3 Sneiheid 35
3.4 Vergelijking met simulatordata
___________________________________________
35
4. Discussie 37
5. Conclusie 40
6. Literatuur 41
7. Bijiagen 48
1. Inleiding
Drie jaar geleden is er een renovatie geweest van de Zeelandbrug. Ondanks dat er tot op
dat moment relatief weinig ongelukken waren gebeurd op de Zeelandbrug, wilde men de
veiligheid op de brug toch proberen te vergroten, want voorkomen is beter dan genezen.
De leuningen die op de oude brug waren geplaatst, zouden bij een ongeluk, waarbij een
voertuig tegen de leuning zou botsen, mogelijk niet voldoende weerstand kunnen bieden
met als gevoig dat het voertuig ofwel te water zou raken ofwel op de fietsstrook terecht
zou komen. Aangezien er de kans bestond dat dit in beide gevallen mensenlevens zou
kunnen kosten, is besloten om de leuningen te vervangen door barriers. Echter de barriers
zouden breder worden dan de constructie met de leuningen, wat noodzakelijkerwijs zou
leiden tot een nieuwe inrichting van de weg, want het brugdek was een gegeven.
1.1 Vooronderzoeken
Om te kijken of het in gebruik nemen van de barriers en daarmee het opnieuw inrichten
van het wegdek, consequenties zou kunnen hebben voor de veiligheid op de weg, heeft de
provincie Zeeland de Rijksuniversiteit Groningen de opdracht gegeven om de veiligheid
op de weg bij mogelijke nieuwe wegvarianten te gaan onderzoeken. Het onderzoek
bestond uit twee delen.
Ten eerste zijn er, aan de hand van drie op de brug aangebrachte varianten van
belijning op de weg, onderzoeken op de Zeelandbrug uitgevoerd. Met behuip van een
videocamera is het verkeer op de oude brug en de drie varianten opgenomen en deze
gegevens zijn geanalyseerd. Gekeken is naar afstand van de voertuigen tot aan de
belijning, oftewel positie op de rijstrook. Er is een onderverdeling gemaakt in grootte van
het voertuig (auto, bus of vrachtauto) en de aan- of afwezigheid van tegenliggers. Verder
zijn de omgevingsinvloeden meegenomen, zoals zicht, aanwezigheid en sterkte van
(zij)wind.
Ten tweede zijn beelden van de Zeelandbrug geImplementeerd in de rijsimulator en
ritten van proefpersonen in de simulator hebben geresulteerd in data over verschillende
variabelen die van directe invloed zijn op het rijgedrag op de Zeelandbrug. Het voordeel
van een simulatoronderzoek ten opzichte van het onderzoek op de Zeelandbrug zelf is dat
er in de simulator ook een variant kon worden bekeken waarbij de fietsstrook virtueel
werd vervangen door een voetpad met als gevolg extra brede rijstroken.
Meting van njgedrag op de gerenoveerde Zeelandbrug
Uit dit onderzoek (Steyvers & van Wolffelaar, 1998) is gebleken dat de veiligste
situatie zich voordoet wanneer er in tegenstelling tot de oude situatie een dubbele
doorgetrokken streep op de wegas wordt aangebracht om inhalen op de Zeelandbrug
tegen te gaan. Verder is het advies uitgebracht om de variant met de meest brede
rijstroken aan te brengen. Hierbij moet worden vermeld dat provincie Zeeland de
fietsstrook graag wilde behouden met name in verband met de recreatie in de
zomermaanden.
Steyvers (1999) heeft vervolgens een nader preferentie- en belevingsonderzoek
uitgevoerd naar wegdek- en barrierkleuren op de Zeelandbrug. Uit dit onderzoek is
gebleken dat plaatsing van acoustische belijning, zowel aan de wegkant als op de
geplande doorgetrokken streep, een hulpmiddel kan vormen om de laterale positiekeuze
te bepalen. Daarnaast is diepzwart asfalt niet geschikt, omdat het dan niet meer een goed
waameembare achtergrond is om op te rijden (vooral niet bij regen of njden in de nacht).
Basalt- of porfiergrijs asfalt met wine of lichtgrijze barrier worden het meest
gewaardeerd en geprefereerd. Ook geel scoort hoog, dit is vooral gunstig bij mist. Tot
slot worden een barrier met opgeplaatste staken (jalons) of een lage leuning het meest
gewaardeerd en geprefereerd. Van windschermen hebben de proefpersonen een afkeer.
Dinnissen (1999) heeft met behuip van het materiaal van het onderzoek van Steyvers
& van Wolffelaar (1998) een analyse uitgevoerd naar het inhaalgedrag op de
Zeelandbrug. Het effect van de aanwezigheid van de klapbrug en verschillen tussen beide
rijstroken is in dit onderzoek meegenomen. Tussen de varianten is verschil in
inhaalgedrag geconstateerd. Echter de positiekeuze op de weg is weinig verschillend voor
beide rijstroken en het soort verkeer. Tevens heeft wind weinig invloed op de
positiekeuze op de weg.
Tijdens de vooronderzoeken is er vanuit gegaan dat plaatsing van de barriers veel
ruimte in beslag zou nemen. In de nameting van deze vooronderzoeken, waarvan hier
verslag wordt gedaan, is gebleken dat deze ruimte wel kon worden gebruikt. De barriers
konden namelijk toch smaller worden gemaakt met als gevolg dat er voor bredere
rijstroken kon worden gekozen. Dc fietsstrook kon daardoor behouden blijven. Echter
hoe de brug er precies uit is komen te zien na de renovatie, zal nog nader beschouwd
worden.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 2
1.2 Doe!
Het algemene doe! van het besturen van een voertuig is het op de plaats van bestemming
komen, zonder daarbij ongelukken te veroorzaken (Van der Hulst, 1999). Om dit doe!
verder uit te diepen, wordt in paragraaf 1.4 aan de hand van een taakanalyse gekeken hoe
de rijtaak op de Zeelandbrug kan worden uitgevoerd, wat in de paragrafen 1.5 t/m 1.8
vervolgens uitgebreid wordt behandeld. Kritiek op de traditionele taakana!ysemethoden is
dat ze beschreven worden als sequentieel gedrag. Dit wordt uitgevoerd in een vaste,
normatieve volgorde, terwiji complex gedrag niet op zo'n eenvoudige manier mag
worden omschreven (Vicente, 1995, van der Huist, 1999). De taakanalyse van het huidige
onderzoek dient echter alleen om inzicht te krijgen in de problernatiek bij het rijden op de
Zeelandbrug. Verder wordt de positie op de weg van verschi!!ende voertuigen gerneten,
waarbij het onmogelijk is om over comp!exe gedragingen uitspraken te doen. Vandaar
dat in de vo!gende paragraaf eerst dieper wordt ingegaan op de comp!exiteit van de
rijtaak en in dat !icht kunnen de andere paragrafen worden bekeken.
1.3 De rijtaak
Het besturen van een motorvoertuig is een zeer comp!exe taak aangezien er tijdens het
rijden met vee! factoren rekening moet worden gehouden. Deze factoren kunnen
omschreven worden op drie taalcniveaus van autorijden, namelijk op strategisch, tactisch
en contro!e-niveau (Janssen, 1979).
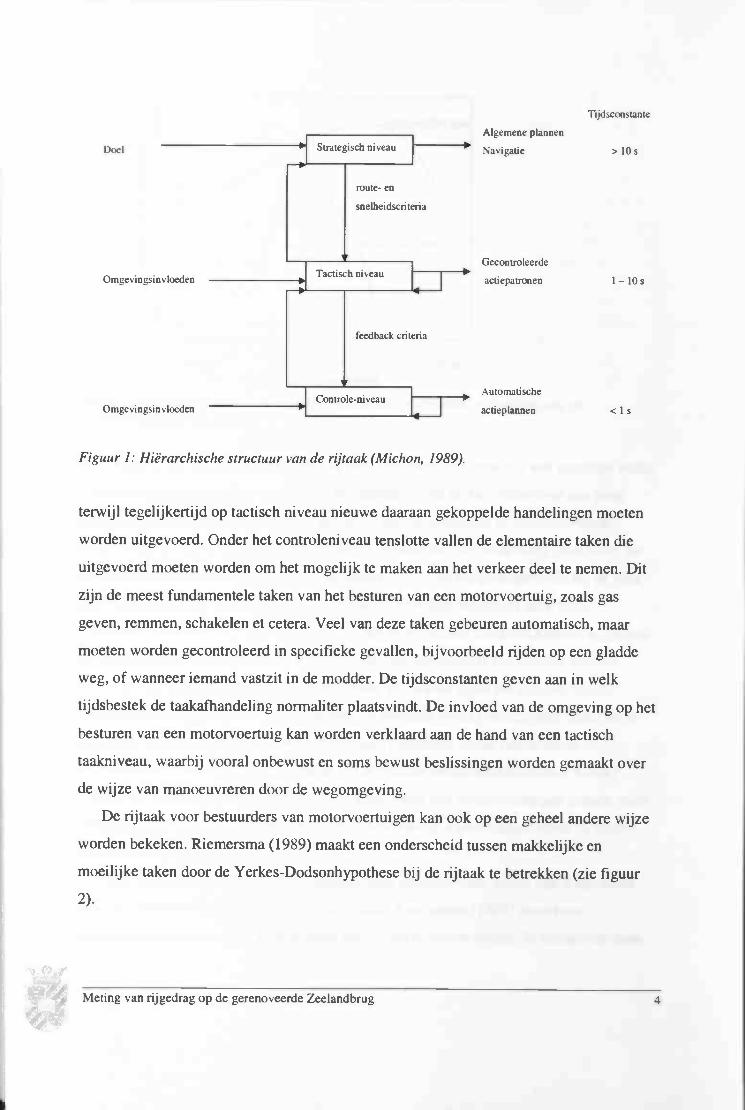
In figuur 1 is de samenhang tussen de drie taakniveaus weergegeven (Michon, 1989).
Het strategisch niveau beschnjft de manier waarop mensen hun verplaatsingen
voorbereiden, dat wil zeggen, hoe zij hun bestemming, route en voertuig kiezen. Daarbij
spe!en onder andere overwegingen inzake kosten en risico's een be!angrijke rol. Deze
p!annen worden bovendien beInvloed door de algemene opvattingen en gevoe!ens
(attitudes) die weggebruikers koesteren met betrekking tot verkeer en vervoer, hun
persoon!ijke omstandigheden en verder door factoren zoals de behoefte aan ontspanning
of comfort. Het tactisch niveau beschrijft op welke wijze weggebruikers zich gedragen
als zij reageren op de omstandigheden van het moment, zoals inhalen. Dit
manoeuvregedrag wordt in belangrijke mate gedicteerd door de heersende situatie. Er kan
een interactie optreden tussen de diverse niveaus. Wanneer er bijvoorbeeld een omleiding
is, zal op strategisch niveau een nieuwe route en tijdsplanning moeten worden uitgedacht,
Meting van njgedrag op de gerenoveerde Zeelandbrug 3
Tjdsconstante
Algemenc planncn
i)oel Strategisch niVeaU Navigatic > 10 s
route- en
snelhcidscriteria
Gecontroleerde
omgevingsinvloeden __________.._...JSChI,, I
acticpatrtxien I — lOs
feedback criteria
AutornatischeControle-niveau
Omgevingsinvloeden actieplannen <1 $
Figuur 1: Hiërarchische structuur van de rijtaak (Michon, 1989).
terwiji tegelijkertijd op tactisch niveau nieuwe daaraan gekoppelde handelingen moeten
worden uitgevoerd. Onder het controleniveau tenslotte vallen de elementaire taken die
uitgevoerd moeten worden om het mogelijk te maken aan het verkeer deel te nemen. Dit
zijn de meest fundamentele taken van het besturen van een motorvoertuig, zoals gas
geven, remmen, schakelen et cetera. Veel van deze taken gebeuren automatisch, maar
moeten worden gecontroleerd in specifieke gevallen, bijvoorbeetd rijden op een gladde
weg, of wanneer iemand vastzit in de modder. De tijdsconstanten geven aan in welk
tijdsbestek de taakathandeling normaliter plaatsvindt. De invloed van de omgeving op het
besturen van een motorvoertuig kan worden verklaard aan de hand van een tactisch
taakniveau, waarbij vooral onbewust en soms bewust beslissingen worden gemaakt over
de wijze van manoeuvreren door de wegomgeving.
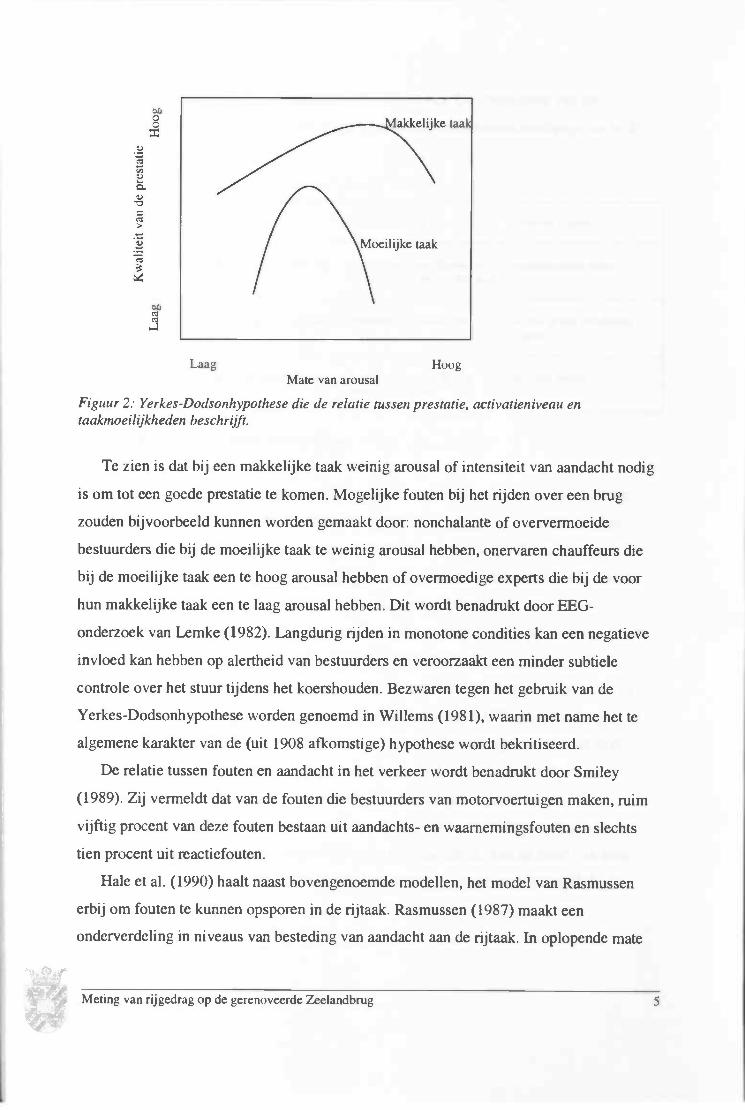
De rijtaak voor bestuurders van motorvoertuigen kan ook op een geheel andere wijze
worden bekeken. Riemersma (1989) maakt een onderscheid tussen makkelijke en
moeilijke taken door de Yerkes-Dodsonhypothese bij de rijtaak te betrekken (zie figuur
2).
Meting van njgedrag op de gerenoveerde Zeelandbrug 4
00
4)
UI-
U
>
V
.1
Mate van arousal
Figuur 2: Yerkes-Dodsonhypothese die de relatie tussen prestatie, activatieniveau entaakmoeilijkheden beschrzjft.
Te zien is dat bij een makkelijke taak weinig arousal of intensiteit van aandacht nodig
is om tot cen goede prestatie te komen. Mogelijke fouten bij het rijden over een brug
zouden bijvoorbeeld kunnen worden gemaakt door: nonchalante of oververmoeide
bestuurders die bij de moeilijke taak te weinig arousal hebben, onervaren chauffeurs die
bij de moeilijke taak een te hoog arousal hebben of overmoedige experts die bij de voor
hun makkelijke taak een te laag arousal hebben. Dit wordt benadrukt door EEG-
onderzoek van Lemke (1982). Langdung njden in monotone condities kan een negatieve
invloed kan hebben op alertheid van bestuurders en veroorzaakt een minder subtiele
controle over het stuur tijdens het koershouden. Bezwaren tegen het gebruik van de
Yerkes-Dodsonhypothese worden genoemd in Willems (1981), waarin met name het te
algemene karakter van de (uit 1908 afkomstige) hypothese wordt bekritiseerd.
Dc relatie tussen fouten en aandacht in het verkeer wordt benadrukt door Smiley
(1989). Zij vermeldt dat van de fouten die bestuurders van motorvoertuigen maken, ruim
vijftig procent van deze fouten bestaan uit aandachts- en waamemingsfouten en slechts
tien procent uit reactiefouten.
Hale et al. (1990) haalt naast bovengenoemde modellen, het model van Rasmussen
erbij om fouten te kunnen opsporen in de rijtaak. Rasmussen (1987) maakt een
onderverdeling in niveaus van besteding van aandacht aan de rijtaak. In oplopende mate
Meting van rijgedrag op de gerenoveerde Zeelandbrug 5
Laag Hoog
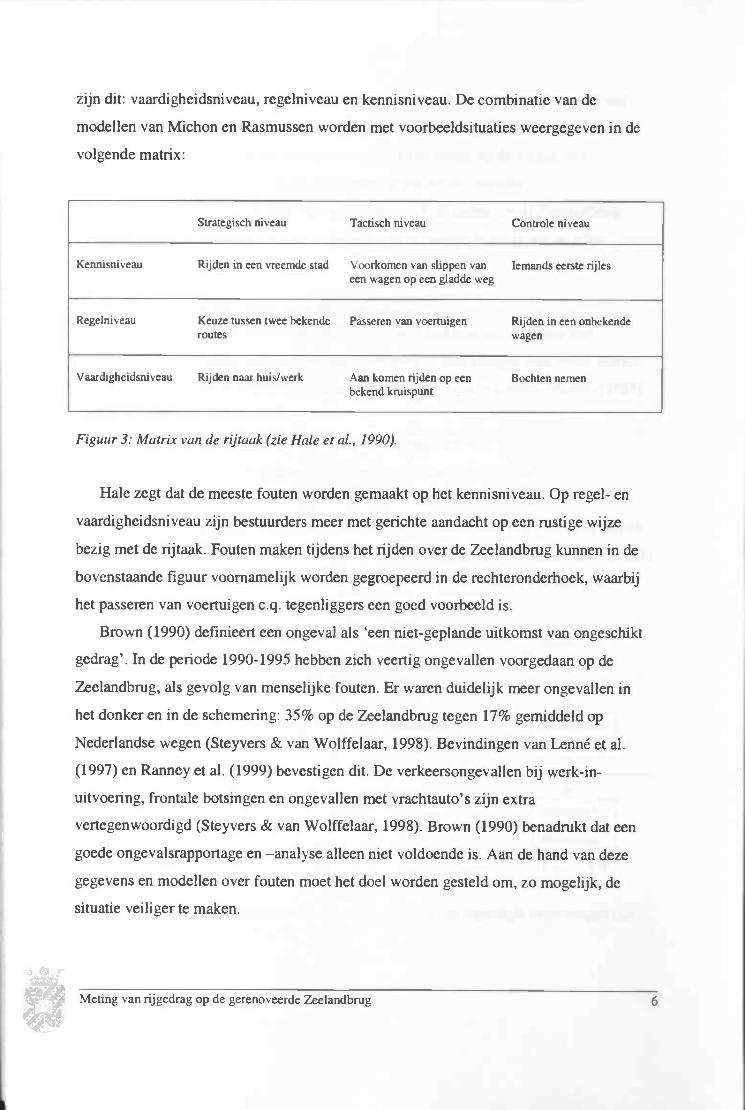
zijn dit: vaardigheidsniveau, regelniveau en kennisniveau. De combinatie van de
modellen van Michon en Rasmussen worden met voorbeeldsituaties weergegeven in de
volgende matrix:
Strategisch niveau Tactisch niveau Controte niveau
Kennisniveau Rijden in een vreemde stad Voorkomen van slippen van lemands eerste rijieseen wagen op een gladde weg
Regelniveau Keuze tussen twee bekende Passeren van voertuigen Rijden in een onbekenderoutes wagen
Vaardigheidsniveau Rijden naar huislwerk Aan komen rijden op een Bochten nemenbekend kruispunt
Figuur 3: Matrix van de rijtaak (zie Hale et a!., 1990).
Hale zegt dat de meeste fouten worden gemaakt op het kennisniveau. Op regel- en
vaardigheidsniveau zijn bestuurders meer met gerichte aandacht op een rustige wijze
bezig met de rijtaak. Fouten maken tijdens het rijden over de Zeelandbrug kunnen in de
bovenstaande figuur voornamelijk worden gegroepeerd in de rechteronderhoek, waarbij
het passeren van voertuigen c.q. tegenhiggers een goed voorbeeld is.
Brown (1990) definieert een ongeva! als 'een niet-geplande uitkomst van ongeschikt
gedrag'. In de periode 1990-1995 hebben zich veertig ongevallen voorgedaan op de
Zeelandbrug, als gevoig van menselijke fouten. Er waren duidelijk meer ongevallen in
het donker en in de schemenng: 35% op de Zeelandbrug tegen 17% gemiddeld op
Nederlandse wegen (Steyvers & van Wo!ffelaar, 1998). Bevindingen van Lenné et al.
(1997) en Ranney et al. (1999) bevestigen dit. De verkeersongevallen bij werk-in-
uitvoering, frontale botsingen en ongevallen met vrachtauto's zijn extra
vertegenwoordigd (Steyvers & van Wolffelaar, 1998). Brown (1990) benadrukt dat een
goede ongevaisrapportage en —analyse alleen niet voldoende is. Aan de hand van deze
gegevens en modellen over fouten moet het doe! worden geste!d om, zo mogelijk, de
situatie veiliger te maken.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 6
Risico's nemen komt voor op alle niveaus in het hierboven genoemde model van
Hale (Summala, 1996). Vandaar dat er op de Zeelandbrug is geprobeerd om risico's te
voorkomen met behuip van de dubbele doorgetrokken streep op de wegas, een
snelheidslimiet van tachtig km/u en bijbehorende snelheidscontroles.
Om een goed beeld te krijgen van wat flu eigenlijk de rijtaak op de Zeelandbrug
inhoudt, zal dit met behuip van een taakanalyse in de volgende paragraaf worden
uitgediept.
1.4 Taakanalyse van het rijden over de Zeelandbrug
Hackman (1969) omschrijft een benadering voor een taakanalyse in termen van
gedragsvereisten ('behaviour requirements'), waarin de handelingen naar voren komen
die een persoon moet verrichten om tot een gewenst resultaat te komen. Michon (1985)
maakt de volgende onderverdeling:
- een feitelijke beschnjving van de rijtaak, 'task requirements'
- een beschnjving van de gedragsvereisten, 'performance objectives'
- een beschrijving van de vermogensvereisten, 'ability requirements'.
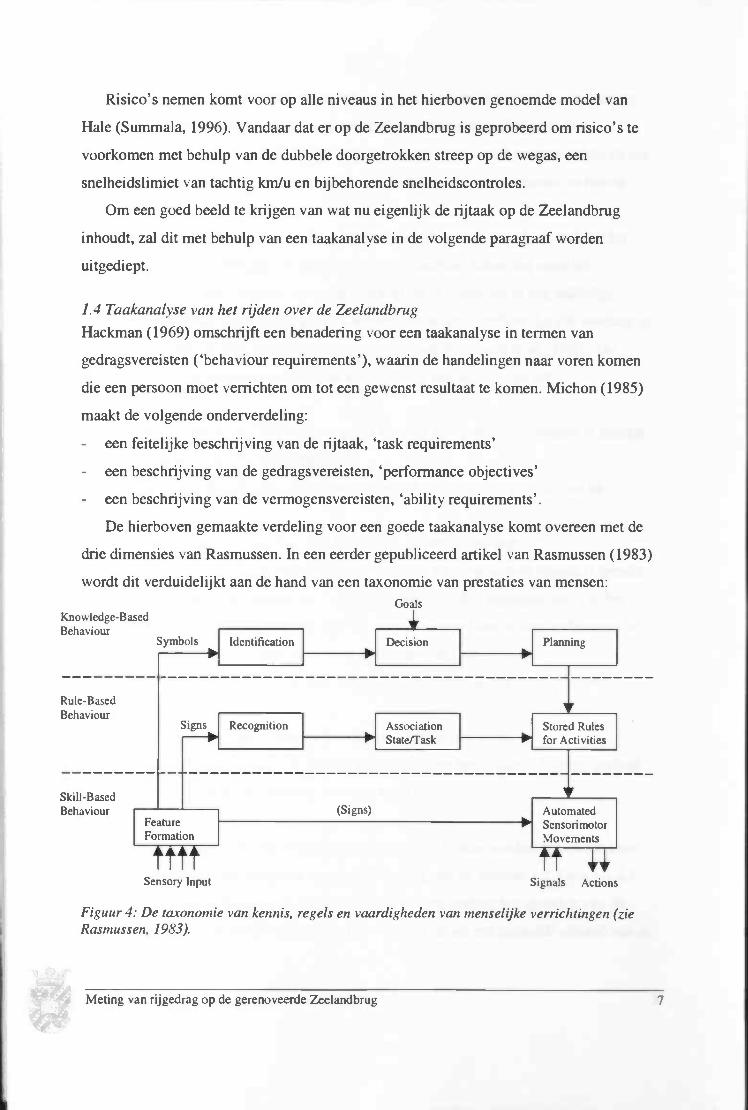
De hierboven gemaakte verdeling voor een goede taakanalyse komt overeen met de
drie dimensies van Rasmussen. In een eerder gepubliceerd artikel van Rasmussen (1983)
wordt dit verduidelijkt aan de hand van een taxonomie van prestaties van mensen:Goals
Figuur 4: De taxonomie van kennis, regels en vaardigheden van menselijke verrichtingen (zieRasmussen, 1983).
Meting van rijgedrag op de gerenoveerde Zeelandbrug 7
Knowledge-BasedBehaviour
Sensory Input Signals Actions
Rasmussen legt de betekenis van signalen ('signals'), tekens ('signs') en symbolen
('symbols') uit met respectievelijk de voorbeelden: een continue afstand tussen
voorligger en de persoon zeif, de marge waarbinnen de lijnen moet worden gebleven om
zich veilig voort te kunnen bewegen en het verderop een auto zien remmen en hierop
anticiperen.
Hetzelfde probleem dat zich bij de modellen voor de rijtaak voordoet, is dat er bij
taakanalyses vanuit wordt gegaan dat een perfecte chauffeur achter het stuur zit
(Brookhuis, 1989). Het voordeel van zo'n taakanalyse is echter dat er een volledige,
uitputtende omschrijving wordt gegeven van de taak van de chauffeur die z'n voertuig in
dit onderzoek over de brug moet manoeuvreren (zie ook Stammers et al., 1990). Dc
taakanalyse van het koershouden over de Zeelandbrug ziet er als volgt uit:
1. Koershouden op de (Zeeland)brug met als doel veilig naar de overkant te komen.
1.1 Het rijden tussen de belijning.
1.1.1 Kijken naar de belijning en de positie van het voertuig ten opzichte van de
belijning.
1.1.2 De situatie dat het voertuig zich te dicht bij de wegas bevindt.
1.1.2.1 Met weinig kracht een beetje naar rechts sturen tot de gewenste positie is bereikt.
1.1.2.2 Hierna moet mogelijk nog een beetje naar links worden tegengestuurd om het
voertuig weer in de gewenste richting over de weg te laten rijden. In Wickens et
al. (1998) wordt dit omschreven als de eerste-orde controletaak.
1.1.3 De situatie dat het voertuig zich te dicht bij de rechter doorgetrokken streep
bevindt.
1.1.3.1 Zie 1.1.2.1, maardan rechts in plaats van links en vice versa.
1.1.4 Situaties dat als gevolg van windverplaatsing, door hetzij zijwind, hetzij invloed
van tegenliggers, het voertuig uit koers raakt.
1.1.4.1 Zie 1.1.2.1 en 1.1.3.1
1.1.5 Het rijden tussen de tegenliggers en de barriers. Dit kan worden gezien als soort
van afgeleide van het njden tussen de belijning, zie de stappen 1.1.1 tIm 1.1.4.1.
Opmerking hierbij: aan de ene kant is er iets meer speling ten opzichte van de
belijning aangezien de tegenliggers en barrier zich op een bepaalde afstand van de
Meting van rijgedrag op de gerenoveerde Zeelandbrug 8
belijning bevinden. Aan de andere kant worden de gevolgen van gemaakte fouten
meteen opgevolgd door fysiek contact tussen het voertuig en de tegenligger of de
barrier. Met andere woorden: de gevolgen bij het maken van fouten bij deze vorm
van koershouden hebben een veel grotere impact dan bij het maken van fouten
tijdens koershouden tussen belijning
1.5 Koershouden
Algemene theorieen over koershouden, onaThankelijk van mogelijke invloeden van de
wegomgeving worden besproken in regelmodellen. In oudere regelmodellen wordt er
vanuit gegaan dat de bestuurder van het voertuig zich bij het koershouden en
manoeuvreren richt op een 'aim point'. Het meest bekende voorbeeld hiervan is het
'cross-over' model, afkomstig uit de luchtvaart (Allen & McRuer, 1977, Baxter &
Harrison, 1979). De bestuurder wordt hierbij verondersteld door middel van
stuurcorrecties het voertuig in de richting van het aim point te bewegen.
Bezwaren die worden genoemd door Godthelp (1989) en Riemersma (1987) zijn: er
wordt vanuit gegaan dat de bestuurder continu z'n aandacht bij de stuurtaak heeft, de
bestuurder wordt verondersteld de voertuigpositie en -beweging waar te nemen vanuit
een vogelvluchtpositie en het model neemt aan dat er een perfecte chauffeur achter het
stuur zit op basis van een perfecte waameming. Carson & Wierwille (1978) komen aan
deze bezwaren tegemoet door in hun model een waarnemingsdrempel op te nemen en
Godthelp & Riemersma (1982) geven aan hoe de bestuurder vanuit z'n voertuig de weg
als perspectief zal waarnemen, zie figuur 5. Dc waarnemingsdrempel, naar voren
gekomen uit de beide hierboven beschreven onderzoeken, bedraagt 0.10 rn/s.
In vroege oogbewegingsstudies hebben Mourant & Rockwell (1970,1972)
aangetoond dat ervaren chauffeurs meer oogfixaties laten zien op de randen van de weg
en ze verder voor zich uit kijken. Ervaren chauffeurs gebruiken volgens hen meer perifere
(dat wil zeggen informatie afkomstig uit de 'ooghoeken') informatie dan onervaren
chauffeurs. Summala (1998) heeft hier onderzoek naar gedaan door mensen te laten
kijken naar ledjes in de auto die op 7, 23 en 38 graden ten opzichte van het verdwijnpunt
van de weg waren gepositioneerd. Uit dit onderzoek is onder andere gebleken dat
onervaren chauffeurs at bij plaatsing van de ledjes op 23 graden minder goed presteerden
Meting van rijgedrag op de gerenoveerde Zeelandbrug 9
Figuur 5: Het door de bestuurder waargenomen beeld van de bebakening en/of de markering,waarbij ziy de laterale positie waarneming voorstelt.
op koershouden en dat ervaren chauffeurs bij 38 graden een vermindenng in prestaties
tijdens het rijden lieten zien. Dit geeft aan dat de ervaren chauffeurs inderdaad meer
gebruik maken van perifere informatie. Echter hoe deze informatie in combinatie met
motorische vaardigheden Ieidt tot betere prestaties tijdens het besturen van een voertuig,
is moeilijk vast te leggen. Uit het onderzoek blijkt tevens dat onervaren chauffeurs bij
zo'n simpele taak soms bijna even goed scoren als ervaren chauffeurs, vooral na een
korte training.
Hughes & Cole (1988) laten zien dat er meer geconcentreerde perifere fixaties
plaatsvinden in het wegbeeld wanneer proefpersonen de opdracht krijgen om extra goed
koers te houden.
Bij koershouden maakt de chauffeur, naast het vergaren van de visuele stimuli
verkregen door de ramen, gebruik van de fysieke karakteristieken van z'n voertuig, met
name door middel van referentiepunten afhankelijk van de breedte en lengle van z'n
wagen. Bij het wegvallen van deze hulpmiddelen tijdens het rijden, bijvoorbeeld door een
beperking in het zichtsveld, zou dit kunnen leiden tot een verslechtering van bet rijgedrag
(Kao & Nagamachi, 1969). Echter breedte van het voertuig is voor een chauffeur minder
belangrijk dan de breedte van de weg (DeFazio et aL, 1992).
Wikman et a!. (1998) hebben onderzoek gedaan naar de invloed van rijervaring en
taken in de auto op koershouden op wegen met verschillende breedte. Op de bredere
autosneiwegen kon beter worden koersgehouden in vergelijking met smallere normale
wegen. Verder werd door experts ten opzichte van de bestuurders met weinig rijervaring
minder tijd besteedt aan de taken in het voertuig.
Meting van njgedrag op de gerenoveerde Zeelandbrug 10
Koershouden kan, zoals in de taakanalyse naar voren is gekomen, ook vanuit een ander
perspectief worden bekeken. Godthelp (1989) vermeldt dat de meeste modellen ervan
uitgaan dat de strategie van de bestuurder erop gencht is koersfouten zoveel mogelijk te
beperken. In dit geval wordt met koershouden meesta! het manoeuvreren van het voertuig
tussen de belijning bedoeld. Met uitzondering van mogelijke invloed van geluid
afkomstig van acoustische belijning, vomit voor de bestuurder belijning slechts visuele
feedback om zich op een veilige manier voort te bewegen. In Steyvers (1994) wordt dit
duidelijk gemaakt door de functionaliteit van de wegrnarkering te omschrijven: "Wegen
worden gemarkeerd om te voorkomen dat voertuigen van de weg raken (kantstrepen) en
om te voorkomen dat voertuigen elkaar raken (middenas-markering)".
Naast koershouden tussen belijning kan naar een andere dimensie worden gekeken,
namelijk het koershouden tussen de fysieke elementen in de wegomgeving. Dit komt
extra duidelijk naar voren op tweebaanswegen en bruggen, waarin koersfouten bij
tegenliggers en barriers, leuningen of wegranden grotere implicaties kunnen hebben in
vergelijking met koersfouten gemaakt bij het koershouden tussen belijning op een
autosneiweg. Beide, hierboven besproken dimensies van koershouden zullen in de
paragrafen 1.6 en 1.7 worden besproken.
1.6 Koershouden tussen belijning
Het belang van belijning bij koershouden komt naar voren in een artikel van Riemersma
(1989). Hier wordt gesteld dat de visuele informatie voor het koershouden beter is
naarmate de hoek tussen de weg en de horizon en de hoeksnelheid beter kunnen worden
waargenomen. Dit zal het geval zijn als de begrenzing van de weg (wegbelijning) een
duidelijker contrast heeft, op grotere afstand kan worden waargenomen en meer continu
van karakter is (zie ook Riemersma, 1987). Vooral bij het rijden in de nacht met regen is
er extra behoefte aan duidelijke belijning (Blaauw, 1985, McKnight et al., 1998).
Steyvers (1994) beaamt dat zichtbare wegbelijningen in het algemeen een positief effect
OP de veiligheid hebben. Een kanttekening die geplaatst wordt, is dat de njstrook niet erg
smal mag worden en dat de belijning consequent moet worden toegepast als onderdeel
van een totaalbeeld van de weg in relatie tot de functie en het gewenste gebruik ervan.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 11
Invloed van belijning op rijgedrag is onderzocht in De Waard et al. (1995). Hier is op
een experimentele weg extra dikke en brede belijning aangebracht en vervolgens is
gekeken naar gereden sneiheid en naar de laterale positie (LP). Een verlaging van de
sneiheid en een constante LP waren het gevoig (zie ook Steyvers & de Waard, 2000).
Wanneer in de literatuur wordt gezocht naar koershouden en belijning, dan komen
hier twee stromingen naar voren, 'Time-to-Line Crossing' (TLC) en standaard deviatie
laterale positie (SDLP). Met TLC wordt de voertuigheweging in het tijdsdomein
beschreven, waardoor het mogelijk wordt de zijdelingse voertuigpositie, de rijsnelheid en
het stuurgedrag van de bestuurder geIntegreerd te beschouwen (Godthelp, 1989). Bij de
SDLP wordt de standaard deviatie gemeten van de laterale positie van het voertuig op de
rijstrook. Voordelen van de TLC boven de SDLP en de LP worden genoemd in de
literatuur. Snelheidsafhankelijkheid van een effect van kijktijd is in Godthelp (1984) naar
voren gekomen uit de TLC analyse en niet uit geIsoleerde (dat wil zeggen zonder een
relatie met de beschikbare ruimte en tijd) data van de laterale positie en van het aantal
graden van het stuurwiel. Dit illustreert bet nut van de TLC als een integrale kwantificatie
van het goed kunnen rijden. Verder blijkt uit Godthelp (1989) dat de TLC tegemoet kan
komen aan en onderzoek mogelijk maakt naar één van de bezwaren van modellen van
koershouden, namelijk de situatie dat iemand tijdelijk z'n aandacht niet richt op de
rijtaak.
Echter in het huidige onderzoek kan niet zomaar gebruik worden gemaakt van (één
van) beide maten van koershouden, aangezien er wordt gewerkt met video-opnamen op
een vaste positie op de brug. Voor de zojuist beschreven TLC en SDLP zijn continue
registraties nodig van het rijgedrag van één proefpersoon. Echter, de SDLP kan worden
afgeleid uit de gemiddelden van alle voertuigen. In het huidige onderzoek zal uitsluitend
gewerkt worden met de LP en de SDLP van verschillende voertuigen, waarbij een
vergelijking met de SDLP via interproefpersoon-observatie kan worden gemaakt.
Zoals eerder is vermeld, gaan de meeste modellen ervan uit dat de strategie van de
bestuurder erop gericht is koersfouten zoveel mogelijk te beperken (Godthelp, 1989).
Godthelp en Konings (1981) hebben dit duidelijk gemaakt in een experiment waarin
proefpersonen over een rechte weg reden en ofwel de opdracht kregen om zo recht
mogelijk over de weg te rijden of om aspecten uit de omgeving op te noemen. Hieruit is
Meting van rijgedrag op de gerenoveerde Zeelandbrug 12

gebleken dat de variatie in de laterale positie op de weg bij het rechtrijden kleiner was
dan bij het benoemen.
Onderzoek met de SDLP kan volgens Godthelp (1989) interpretatieproblemen
opleveren. Er wordt gerefereerd aan een onderzoek van O'Hanlon et al. (1982) waarin
wordt gekeken naar invloed van diazepam op het rijgedrag. Een waarde van de SDLP van
0.30 m wordt als kritisch beschouwd bij het rijden op een autosnelweg. Hierbij is echter
van invloed met welke sneiheid op de autosneiweg wordt gereden en ook de breedte van
de njstrook en van het voertuig zijn factoren die mee kunnen spelen bij het interpreteren
van de SDLP.
1.6.1 Invloed van markerings- of ooghoogte op koershouden tussen belzj'ning
Er is enig onderzoek gedaan naar anticiperen op grond van waarneming van het
wegverloop en/of op basis van voorkennis. Riemersma (1982) en Godthelp & Riemersma
(1982) hebben onderzoek gedaan naar het effect van hoogte van wegmarkeringen op het
voorspellen van het wegverloop. Hieruit is gebleken dat bij hoge wegmarkeringen zich
een hoog foutenpercentage voordoet in het doen van voorspellingen over het wegverloop
en een laag percentage bij lage wegmarkeringen. Vervolgens kan dus worden gesteld dat
voor bestuurders van voertuigen met een grote zithoogte (bussen en vrachtwagens) in
vergelijking met bestuurders van voertuigen met een kleine zithoogte (auto's en motoren)
een duidelijker beeld wordt gevormd van het wegverloop. Voor de eerstgenoemde
bestuurders bevindt de wegmarkenng zich namelijk dichter bij de grond. Tevens wordt
uit figuur 5 uit de vorige paragraaf duidelijk dat hoogte in het perspectiefbeeld van
invloed kan zijn op inzicht in het wegverloop.
Een wederkerend nadeel is dat er ook in dit model vanuit wordt gegaan dat de
bestuurder continu z'n volledige aandacht bij de rijtaak heeft, terwiji dit in werkelijkheid
niet altijd zo hoeft te zijn. Dergelijke beschrijvingen van rijgedrag zijn daarom in principe
ongeschikt om de mate waarin de bestuurder tijd kan besteden aan andere aspecten van
de rijtaak, te verkiaren.
1.7 Koershouden tussen tegenliggers en de barrierOver invloed van tegenhiggers op rijgedrag is enig onderzoek gedaan. In Björkman
(1963) en Semb (1969) moesten chauffeurs een schatting maken van de sneiheid van een
Meting van njgedrag op de gerenoveerde Zeelandbrug 13
tegemoetkomende auto. Proefpersonen bleken een overschatting te maken van de
sneiheid en daardoor dachten ze dat de tegenligger eerder aan hen voorbij zou komen.
Daamaast hebben Summala et al. (1981) naar aanleiding van bevindingen van onderzoek
van Helander (1978) de stuurbewegingen gemeten van proefpersonen voor, tijdens en
nadat ze werden gepasseerd door een tegenhigger. Uit beide onderzoeken is opmerkelijk
genoeg gebleken dat bij smalle en brede wegen er twee seconden voordat de beide
voertuigen elkaar passeren, eerst een lichte stuurbeweging naar links wordt gemaakt,
gevolgd door een correctie naar rechts.
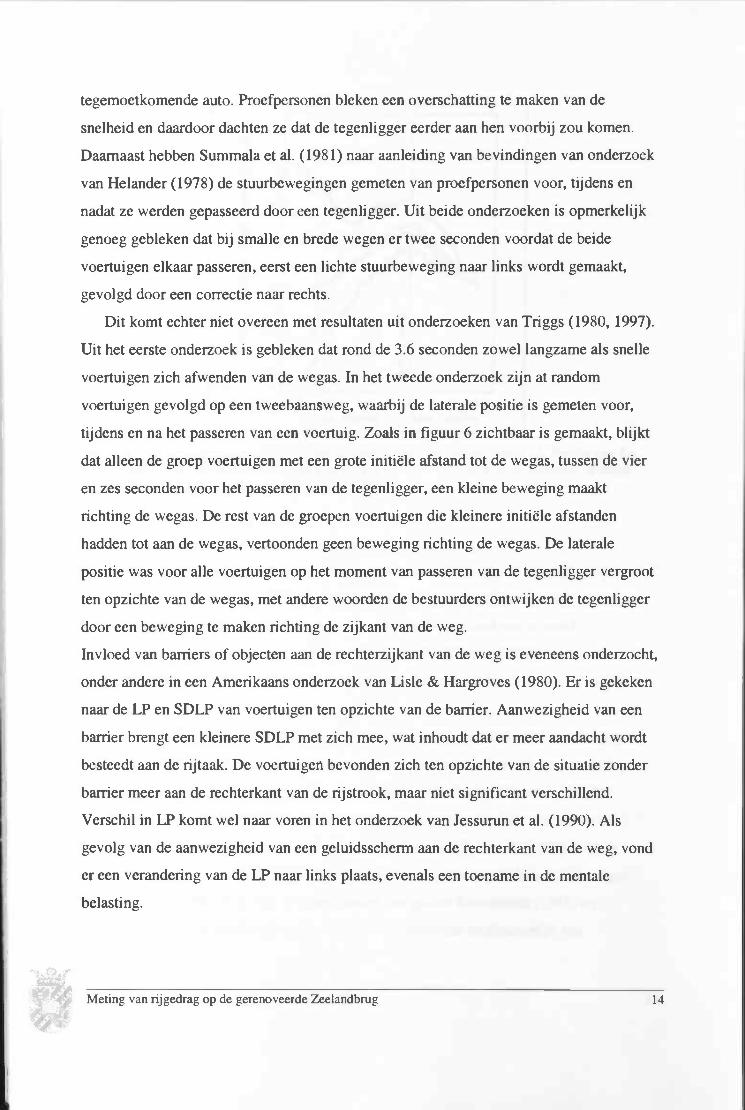
Dit komt echter niet overeen met resultaten uit onderzoeken van Tnggs (1980, 1997).
Uit het eerste onderzoek is gebleken dat rond de 3.6 seconden zowel langzame als snehle
voertuigen zich afwenden van de wegas. In het tweede onderzoek zijn at random
voertuigen gevolgd op een tweebaansweg, waarbij de laterale positie is gemeten voor,
tijdens en na het passeren van een voertuig. Zoals in figuur 6 zichtbaar is gemaakt, blijkt
dat alleen de groep voertuigen met een grote initiële afstand tot de wegas, tussen de vier
en zes seconden voor het passeren van de tegenligger, een kleine beweging maakt
richting de wegas. De rest van de groepen voertuigen die kleinere initiële afstanden
hadden tot aan de wegas, vertoonden geen beweging richting de wegas. De laterale
positie was voor alle voertuigen op het moment van passeren van de tegenhigger vergroot
ten opzichte van de wegas, met andere woorden de bestuurders ontwijken de tegenligger
door een beweging te maken richting de zijkant van de weg.
Invloed van barriers of objecten aan de rechterzijkant van de weg is eveneens onderzocht,
onder andere in een Amerikaans onderzoek van Lisle & Hargroves (1980). Er is gekeken
naar de LP en SDLP van voertuigen ten opzichte van de barrier. Aanwezigheid van een
barrier brengt een kleinere SDLP met zich mee, wat inhoudt dat er meer aandacht wordt
besteedt aan de rijtaak. Dc voertuigen bevonden zich ten opzichte van de situatie zonder
barrier meer aan de rechterkant van de rijstrook, maar niet significant verschillend.
Verschil in LP komt wel naar voren in het onderzoek van Jessurun et al. (1990). Als
gevoig van de aanwezigheid van een geluidsscherm aan de rechterkant van de weg, vond
er een verandering van de LP naar links plaats, evenals een toename in de mentale
belasting.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 14
Figuur 6: Gemiddelde afstand van het midden van de auto tot aan de wegas alsfiinctie van hetinterval voor en na het passeren van de tegenligger voor vier groepen onderverdeeld op basisvan hun initiële positie op de weg (zie Triggs, 1997).
1.8 Invloed van zijwind en zicht op koershouden
In Godthelp (1989) is, zoals eerder vermeld, summier de invloed van zijwind op de
interpretatie van de laterale positie en op de waamemingsdrempel besproken, namelijk
dat er interpretatieproblemen zouden kunnen ontstaan bij invloed van zijwind.
Daarentegen is uit het onderzoek van Steyvers & van Wolffelaar (1998) naar voren
gekomen dat het effect van zijwind niet significant van invloed bleek te zijn op de LP en
SDLP.
Tenkink (1988) heeft gekeken naar de relatie tussen de sneiheid van het voertuig en
de mate van zicht. Uit literatuur waren al suggesties gedaan dat bestuurders pas hun
sneiheid aanpassen op het moment dat de maximale zicht afstand kleiner is dan de
minimale stopafstand. Er is gebleken dat problemen met koershouden niet alleen een
determinant is voor de snelheidskeuze. Het kan zijn zoals Allen et al. (1977) hebben
geponeerd dat een toename in benodigde aandacht voor inteme problemen kan zorgen.
Deze problemen slaan dan niet op koershouden, aangezien Riemersma (1982) en
Godthelp (1984) ook hebben aangetoond dat snelheidskeuze onafhankelijk van
Meting van rijgecirag op de gerenoveerde Zeelandbrug 15
a.e6SS
III I 4 4 1 1 1 .4.4
kfors M.sflng -. Aft ""i
koershouden is, maar misschien zijn de problemen wel gerelateerd aan keuze van de
sneiheid.
Hildreth et a!. (2000) hebben gekeken naar invloed van volledige zichtsbeperking op
rijgedrag. Hieruit is naar voren gekomen dat het vertoonde rijgedrag aan de hand van
twee modellen kan worden verklaard. Ten eerste zijn stuurhandelingen gekoppeld aan
perceptuele variabelen, zoals laterale positie. Ten tweede zetten de chauffeurs een soort
van visuele target voort, als richtpunt om naar toe te rijden. Mocht er plotseling een
mistbank opdoemen, dan zijn dit mogelijke theorieën van hoe een bestuurder zou kunnen
reageren.
1.9 Hypothese
Naar aanleiding van de vooronderzoeken en de gevonden literatuur is de volgende
probleemstelling opgesteld: zijn de gedane aanbevelingen van inv!oed geweest op het
actuele rijgedrag ten opzichte van het rijgedrag in de voorgaande onderzoeken?
Dc hypothese is: ten opzichte van de oude situatie, zullen flu minder
!ijnoverschnjdingen plaatsvinden, wat de veiligheid op de brug vergroot.
Het resultaat za! inzicht geven in de verandering van het verkeersgedrag voor zover
dat mogelijk is mede beInvloed door de gedane aanbevelingeri. Dit geeft tezamen met de
huidige nameting van het vooronderzoek, ook meteen de theoretische relevantie weer. De
maatschappelijke relevantie is het nagaan of het doen van aanbevelingen uit dit soort
onderzoek kan leiden tot een verhoging van de verkeersveiligheid.
2. Methode
2.1 Onderzoeksopzet
Voor het onderhoud van de Zeelandbrug is een constructie op het fietspad geplaatst. Op
deze constructie zijn met behuip van een camera (JVC TK-C1360 digitale videocamera
met ½ inch CCD) in het voorjaar van 2002 opnames gemaakt van het verkeer rijdend
over de Zee!andbrug. Aangezien er toevallig passerend verkeer als data-materiaal wordt
gebruikt, is er in dit onderzoek niet gewerkt met individueel bekende proefpersonen. Dc
tijden van de opnamen staan in tabel 1 vermeld.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 16
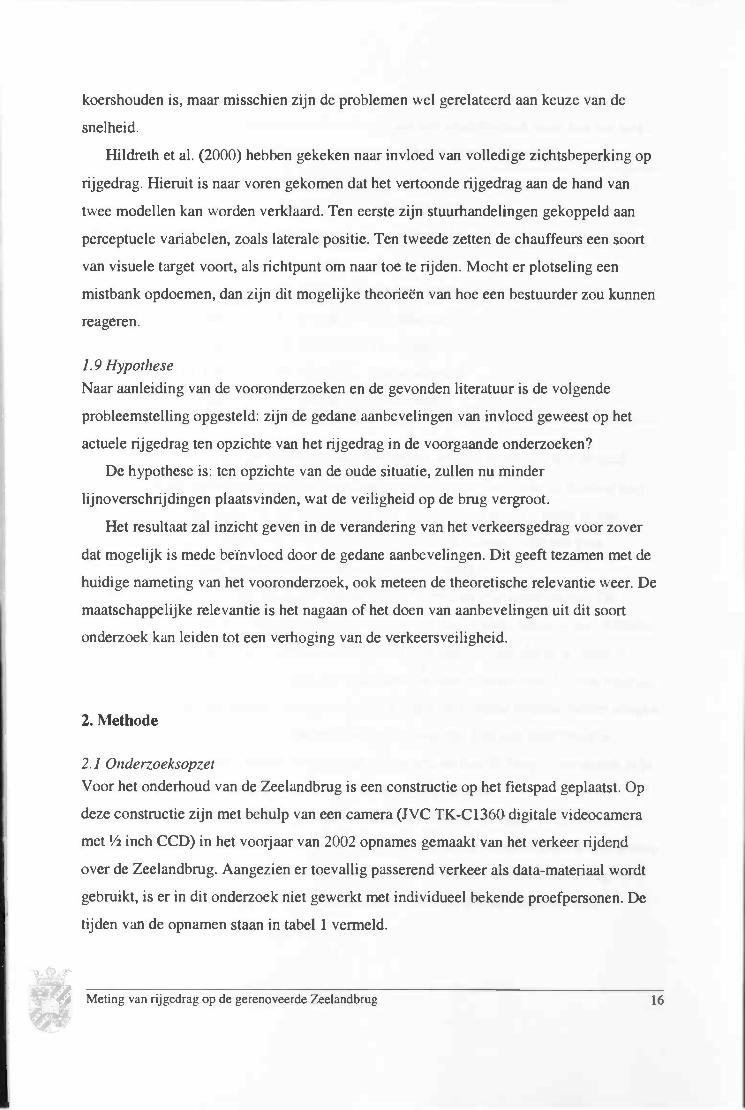
Tabel 1: Opnameschema Zeelandbrug. Het schema was niet strikt bindend, maar Icon met enige
soepeiheid en naar eigen oordeel wegens de omstandigheden worden toe gepast.
Week 23 (03-O9juni) & week 24 (10-l6juni)
vrijdag: 07 juni 11-l4uur (middaguren)
vrijdag: 07 juni 15-18 uur (avondspits)
vrijdag: 07 juni 18-21 uur (avonduren)
maandag: 10 juni 07-10 uur (ochtendspits)
maandag: 10 juni 12-15 uur (middaguren)
maandag: 10 juni 16-19 uur (avondspits)
donderdag: 13 juni 07-10 uur (ochtendspits)
donderdag: 13 juni 15-18 uur (avondspits)
De videocamera was op ruim vijf meter boven het wegdek bevestigd aan de paal
waarop zich een windmeter beyond en op dusdanige wijze geplaatst dat de horizon nog
net te zien was (zie figuur 7). De camera was naar het noorden gericht, zodat er van
invallende zon geen sprake was. Voor een overzicht van de situatie, zijn een paar
fotoprints toegevoegd (zie de laatste bladzijde van dit versiag).
De voormeting bestond uit onderzoek op de oude brug en drie proefvakken. De
huidige situatie is dat de brugleuningen vervangen zijn door smalle barriers, een dubbele
doorgetrokken streep op de wegas is aangebracht en de rijstrookbreedte drie meter is.
Van de proefvakken uit de voormeting zal de derde variant tezamen met de oude brug als
vergelijkingsmateriaal dienen. Voor deze variant is gekozen omdat doorgetrokken strepen
op de wegas zijn aanbevolen en aangebracht op het wegdek. Om een goed beeld te
krijgen van hoe de oude situatie en proefvak drie waren en hoe de brug er flu uitziet, is in
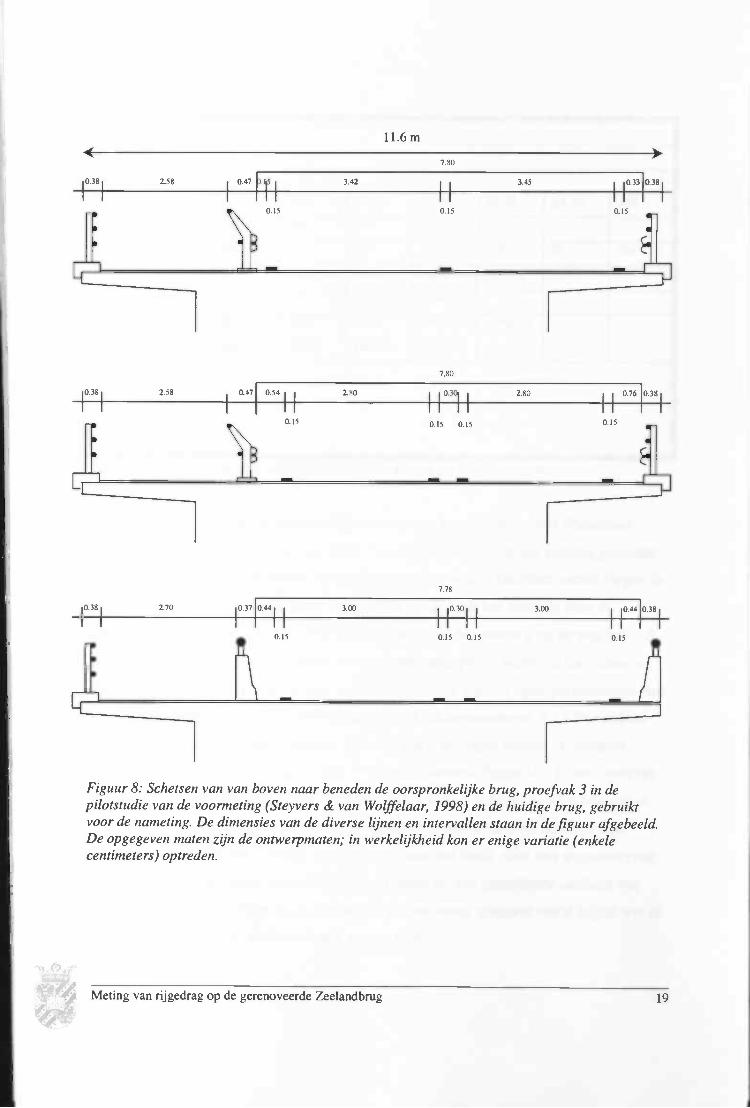
figuur 8 een beeld van de drie voorgenoemde situaties geschetst.
De opnamen werden vastgelegd met een (JVC SR-L900E timelaps PAL-VHS)
videorecorder welke samen met een monitor in een af te sluiten roestvrijstalen kast waren
geplaatst. Het personeel van de Provinciale Onderhoudsdienst van de Zeelandbrug heeft
de banden verwisseld en de weersomstandigheden genoteerd in een Iogboek (zie
Meting van rijgedrag op de gerenoveerde Zeelandbrug 17

2
Figuur 7: Schets van de camera-opstelling op de constructie aan de linkerkant van het brugdekvan de Zeelandbrug. De constructie is hier getekend zoals deze gezien wordt vanaf dezuidkant,zodat aan de linkerkant het portaal is waar defletsstrook doorheen gaat. Met veridaring by deschets:1 constructie ten behoeve van onderhoud van de Zeelandbrug geplaatst over hetfietspad2 een videocamera bevestigd op ruim 5 m hoogte3fietspad4 njbaan voor motorvoertuigen5 nieuw geplaats:e barriers
figuur 9). Bij beide voorgenoemde hebben zich geen problemen voorgedaan.
2.2 Metingen
De video-opnames zijn met behuip van het computerprogramma LATPOSAN verwerkt.
Ben duidelijke omschrijving wordt gegeven in Steyvers & van Wolffelaar (1998):
'Voor het meten van de laterale positie werd een computerprogramma ontwikkeld in
Visual Basic. Op het beeldscherm van een computer werd met een speciale video-
overlaykaart (Screen machine) en een resident programma het videobeeld gezet. Het
analyseprogramma maakte het mogelijk een dwarslijn te tekenen van de buitenkant van
de belijning van de linkerrijstrook tot de buitenkant van de belijning van de
rechterrijstrook. Omdat de afstand hiertussen bekend was, was hiermee ook de schaal in
het videobeeld ter hoogte van deze dwarslijn bekend.
Meting van rijgedrag op de gerenoveerde Zeelandbrug18
4
11.6m
2.58 0.47 IilJS
3.42
0.15
7.80
I I I10.3310.381
0.15 0.15
2.58 0.47
I
0.54 2.80
0.15
7.80
I I
0.3012.80 0.76 p0.381
0.15 0.15 0.15
2.70
7.78
I0.3hI0lI I I°I
3.00
I
0.15 0.15 0.15 0.15
Figuur 8: Schetsen van van boven naar beneden de oorspronkelijke brug, proefvak 3 in depilotstudie van de voormeting (Steyvers & van Wolffelaar, 1998) en de huidige brug, gebruiktvoor de nameting. De dimensies van de diverse lijnen en intervallen swan in defiguur afgebeeld.De opgegeven maten zjn de ontwerpmaten; in werkelijkheid kon er enige variatie (enkelecentimeters) optreden.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 19

Datum:
Starttijd:
Weer:
Temp. <0 0-5 5-10 10-15 15-20 20-25 25-30 >30
Windk. 0-1 2-3 4-5 6-7 8-9 10-11
Windr. N NO 0 ZO Z ZW W NW
Neersi. geen dauw motregen regen hagel sneeuw
Bewolk. geen 1/3 1/2 2/3 geheel
Zicht <50 m 50-
200m
200-
500m
500-
l000m
1000-
5000m
>5000 m
Opm
Figuur 9: Voorbeeld van een tabel voor een video-opname uit het video-logboek.
Vervolgens werd met de enkelbeeldbediening van de analyserecorder (Panasonic
video cassetterecorder AG 7330) het beeld van een passerend voertuig zodanig geplaatst
dat deze met de voorwielen (linkerrijstrook) of de achterwielen (rechterrijstrook) tegen de
dwarslijn stond, waarna met de muis de buitenste randen van het voertuig (niet de
spiegels) werden aangeklikt. Hiermee was de positie van het voertuig op de weg bekend
aismede de breedte. Vervolgens werd met een code aangegeven welke verkeerssituatie
het betrof: vnj njdende personenauto, vrij rijdende bus of vrachtwagen, personenauto met
tegenligger, vrachtwagen of bus met tegenhigger, of inhaalmanoeuvre. (...) Vrij rijdend
werd gedefinieerd als het niet aanwezig zijn van een tegenligger binnen Ca. honderd
meter van het te meten voertuig. (...) Zie voor een voorbeeld figuur 10.' Er kon voor het
verkeer rijdend van noord naar zuid (linkerrijbaan) echter niet direct worden bepaald of
er wel of niet een tegenligger aankwam, aangezien de camera naar het noorden was
gericht. Daarom is bij elk voertuig op de linkerrijbaan het beeld ruim vier seconden (wat
overeenkomt met de eerder genoemde honderd meter bij een gemiddelde sneiheid van
tachtig km/u van het verkeer op de Zeelandbrug) naar voren gespoeld om te kijken wat de
verkeerssituatie voor het desbetreffende voertuig was.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 20
---\--+ -
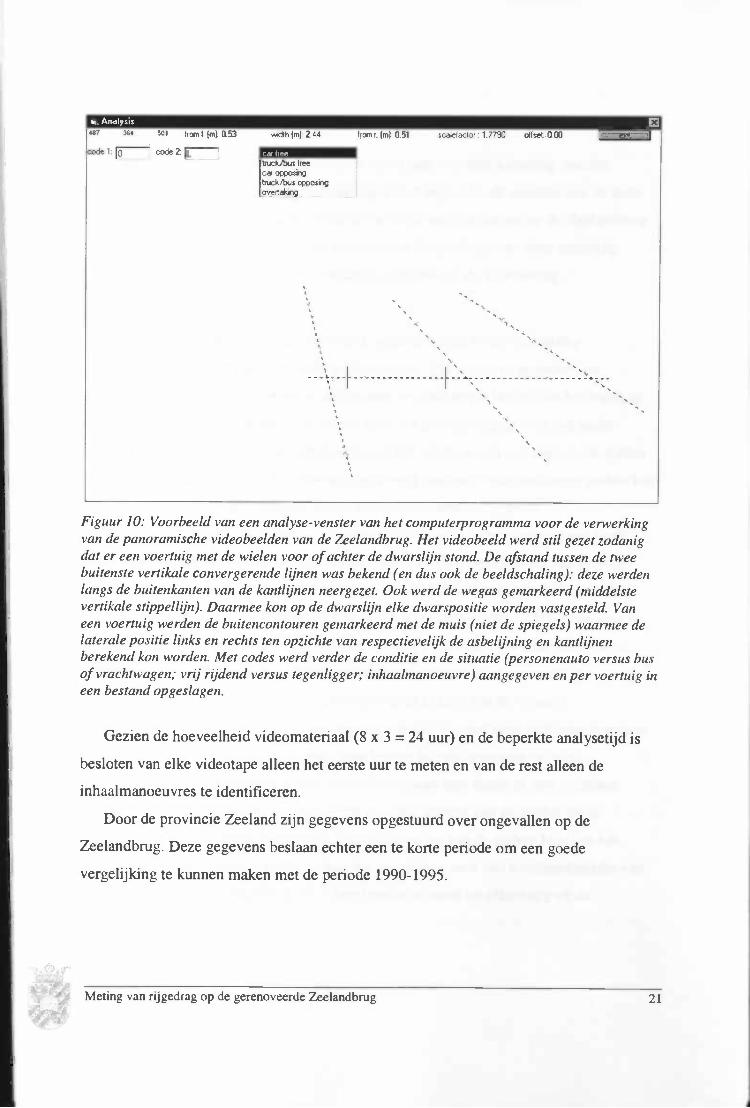
Figuur 10: Voorbeeld van een analyse-venster van het computerprogramma voor de verwerkingvan de panoramische videobeelden van de Zeelandbrug. Het videobeeld werd stil gezet zodanigdat er een voertuig met de wielen voor of achter de dwarslijn stond. De afstand tussen de tweebuitenste vertikale convergerende li:jnen was bekend (en dus ook de beeldschaling): deze werdenlangs de buitenkanten van de kantlijnen neergezet. Ook werd de wegas gemarkeerd (middelstevertikale stippellzjn). Daarmee kon op de dwarslijn elke dwarspositie worden vastgesteld. Vaneen voertuig werden de buitencontouren gemarkeerd met de muis (niet de spiegels) waarmee delateraie positie links en rechts ten opzichte van respectievelijk de asbelijning en kantlijnenberekend kon worden. Met codes werd verder de conditie en de situatie (personenauto versus busof vrachtwagen; vrij rijdend versus tegenligger; inhaalmanoeuvre) aangegeven en per voertuig ineen bestand opgeslagen.
Gezien de hoeveelheid videomateriaal (8 x 3 = 24 uur) en de beperkte analysetijd is
besloten van elke videotape alleen het eerste uur te meten en van de rest alleen de
inhaalmanoeuvres te identificeren.
Door de provincie Zeeland zijn gegevens opgestuurd over ongevallen op de
Zeelandbrug. Deze gegevens beslaan echter een te korte periode om een goede
vergelijking te kunnen maken met de periode 1990-1995.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 21
IPILIPIJ. LLJ
odel Ia adeZIL1bus freecaooseigbJbus
3. Resultaten
3.1 Inleiding
In dit resultatengedeelte zullen ten eerste de resultaten van deze nameting worden
uitgezet tegen de resultaten uit de voormeting, in het bijzonder de conditie van de oude
brug en proefvak drie. Ten tweede wordt de snelheid van voertuigen op de Zeelandbrug
nader beschouwd. Ten slotte zullen de betrouwbaarheidsindices van deze nameting
worden vergeleken met die van het simulatoronderzoek uit de voorrneting.
3.2 Laterale positie
Er zijn meer dan 6400 voertuigen ingevoerd, waarbij net als in de voormeting
personenauto's smaller dan 1.30 meter en breder dan 2.25 meter en motoren zijn
uitges!oten. Verder zijn personenvoertuigen met een aanhanger breder dan het voertuig
zeif (bijvoorbee!d een caravan of een brede kar) wel als tegenhigger voor een ander
voertuig meegenomen, maar de coordinaten van het voertuig zijn niet ingevoerd. Reden
hiervoor is dat de positie van het voertuig op de weg met een brede aanhanger anders kan
zijn dan wanneer de aanhanger niet achter de personenauto had gezeten.
Een bijkomstigheid wat zich in de voormeting niet en in deze nameting we! heeft
voorgedaan is dat de camera zich niet boven, maar aan de (linker)zijkant van de weg
beyond. Dit bracht een perspectiefvertekening met zich mee waar voor de linkerrijbaan
gecorrigeerd moest worden met een vermenigvuldigingsfactor van 3.15/3.30 en voor de
rechterrijbaan was deze factor 3.45/3.30. Bij het nog uit te voeren tweede dee! van de
nameting zal dezelfde cameraopstelling worden gebruikt als in de voormeting
(videocamera boven het midden in plaats van aan de zijkant van de rijbaan).
Een nadee! ten opzichte van de voormeting wat met bovenstaand probleem te maken
heeft, was dat de linkerwielen van met name bussen en vrachtwagens voor de
Iinkerrijbaan en de rechterwie!en voor de rechterrijbaan zeer slecht of niet zichtbaar
waren. Hierdoor konden voertuigbreedte en precieze afstand van de wielen tot de
be!ijning niet goed worden vastgesteld. Echter de wielen aan de andere kant van bet
voertuig waren goed zichtbaar en vandaar dat gekozen is voor een standaardbreedte van
2.45 m voor bussen en vrachtwagens. Deze breedte is deels uit alkomstig uit de
Meting van rijgedrag op de gerenoveerde Zeelandbrug 22
voormeting en deels uit een klein exploratief onderzoek op internet naar breedtes van
vrachtwagens en bussen.
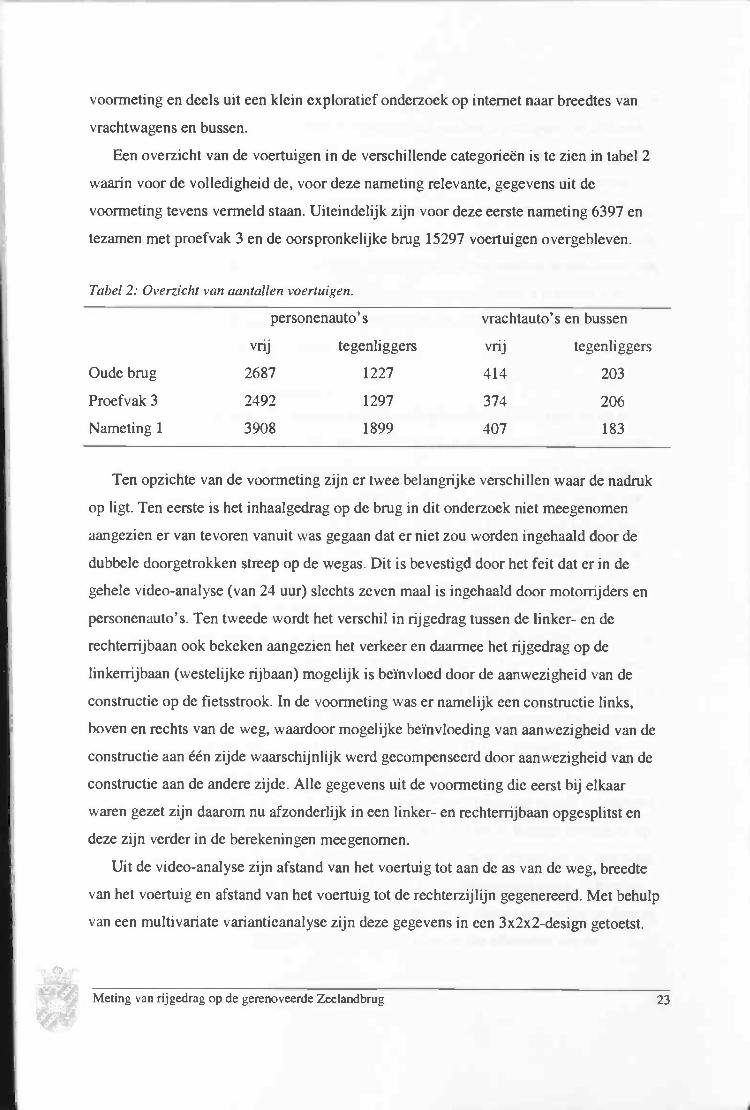
Een overzicht van de voertuigen in de verschillende categorieen is te zien in tabel 2
waarin voor de volledigheid de, voor deze nameting relevante, gegevens uit de
voormeting tevens vermeld staan. Uiteindelijk zijn voor deze eerste nameting 6397 en
tezamen met proefvak 3 en de oorspronkelijke brug 15297 voertuigen overgebleven.
Tabel 2: Overzicht van aantallen voertuigen.
personen auto's
tegenliggersvrij
vrachtaut0's en bussen
vrij tegenliggers
Oudebrug 2687 1227 414 203
Proefvak3 2492 1297 374 206
Nameting 1 3908 1899 407 183
Ten opzichte van de voormeting zijn er twee belangrijke verschillen waar de nadruk
op Iigt. Ten eerste is het inhaalgedrag op de brug in dit onderzoek niet meegenomen
aangezien er van tevoren vanuit was gegaan dat er niet zou worden ingehaald door de
dubbele doorgetrokken streep op de wegas. Dit is bevestigd door het feit dat er in de
gehele video-analyse (van 24 uur) slechts zeven maal is ingehaald door motorrijders en
personenauto's. Ten tweede wordt het verschil in rijgedrag tussen de linker- en de
rechterrijbaan ook bekeken aangezien het verkeer en daarrnee het rijgedrag op de
linkerrijbaan (westelijke rijbaan) mogelijk is beInvloed door de aanwezigheid van de
constructie op de fietsstrook. In de voormeting was er namelijk een constructie links,
boven en rechts van de weg, waardoor mogelijke beInvloeding van aanwezigheid van de
constructie aan één zijde waarschijnlijk werd gecompenseerd door aanwezigheid van de
constructie aan de andere zijde. Alle gegevens uit de voormeting die eerst bij elkaar
waren gezet zijn daarom flu afzonderlijk in een linker- en rechterrijbaan opgesplitst en
deze zijn verder in de berekeningen meegenomen.
Uit de video-analyse zijn afstand van het voertuig tot aan de as van de weg, breedte
van het voertuig en afstand van het voertuig tot de rechterzijlijn gegenereerd. Met behuip
van een multivariate variantieanalyse zijn deze gegevens in een 3x2x2-design getoetst.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 23
Dit zijn respectievelijk de drie condities (originele brug, proefvak 3 van de voormeting en
de nameting), de verkeerssituatie (aan- of aiwezigheid van een tegenhigger) en rijstrook
(de linker, ofwel westelijke rijstrook en de rechter, ofwel oostelijke rijstrook). Aangezien
er een toetsing plaatsvindt ten opzichte van de originele brug, is een simpele contrast
vergelijking in MANOVA gemaakt. Verder is de breedte van de voertuigen van invloed
bij de bepaling van de afstand tot de wegas en de zijhijn en om met deze invloed rekening
te houden, zal breedte als covariaat worden meegenomen. Eerst worden de resultaten van
personenauto's en vervolgens de resultaten van bussen en vrachtauto's getoond. Een
overzicht van deze resultaten wordt daarna getoond en ten slotte wordt ingegaan op
invloed van zijwind op laterale positie.
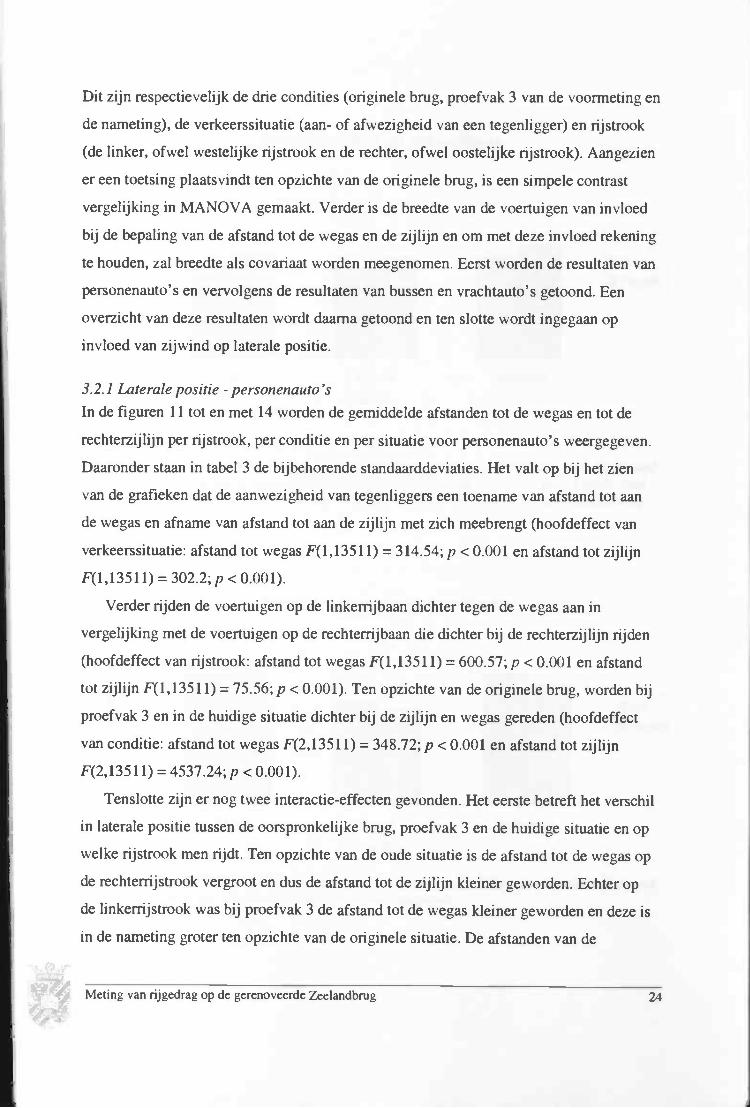
3.2.1 Laterale positie - personenauto 's
In de figuren 11 tot en met 14 worden de gemiddelde afstanden tot de wegas en tot de
rechterzijlijn per rijstrook, per conditie en per situatie voor personenauto's weergegeven.
Daaronder staan in tabel 3 de bijbehorende standaarddeviaties. Het valt OP bij het zien
van de grafieken dat de aanwezigheid van tegenliggers een toename van afstand tot aan
de wegas en afname van afstand tot aan de zijlijn met zich meebrengt (hoofdeffect van
verkeerssituatie: afstand tot wegas F(1,1351 1) = 314.54; p <0.001 en afstand tot zijlijn
F(1,1351 1) = 302.2; p <0.001).
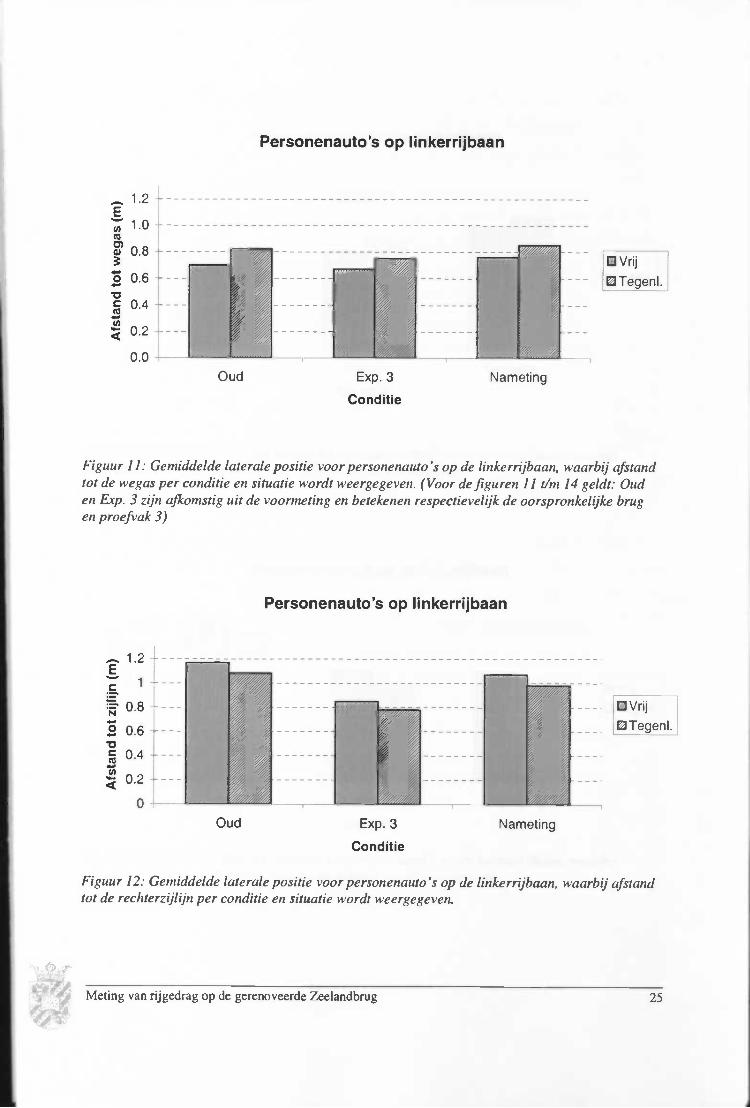
Verder rijden de voertuigen OP de hinkerrijbaan dichter tegen de wegas aan in
vergehijking met de voertuigen op de rechterrijbaan die dichter bij de rechterzijlijn rijden
(hoofdeffect van rijstrook: afstand tot wegas F(1,1351 1) = 600.57; p <0.001 en aistand
tot zijlijn F(1,13511) = 75.56; p <0.001). Ten opzichte van de originele brug, worden bij
proefvak 3 en in de huidige situatie dichter bij de zijlijn en wegas gereden (hoofdeffect
van conditie: afstand tot wegas F(2,1351 1) = 348.72; p <0.001 en afstand tot zijhijn
F(2,13511) = 4537.24;p <0.001).
Tenslotte zijn er nog twee interactie-effecten gevonden. Het eerste betreft het verschil
in laterale positie tussen de oorspronkelijke brug, proefvak 3 en de huidige situatie en op
welke njstrook men rijdt. Ten opzichte van de oude situatie is de afstand tot de wegas op
de rechtemjstrook vergroot en dus de afstand tot de zijlijn kleiner geworden. Echter op
de linkerrijstrook was bij proefvak 3 de afstand tot de wegas kleiner geworden en deze is
in de nameting groter ten opzichte van de originele situatie. De aistanden van de
Meting van rijgedrag op de gerenoveerde Zeelandbrug 24
Personenauto's op Iinkerrijbaan
1.2 -
UIUI
UI
4-04-VCUI4-UI
N4-04-VCUI4-UI
Personenauto's op Iinkerrijbaan
1.0
0.8 -t-
0.6 -i----
0.4
0.2
DVrijD Tegeni.
Conditie
Figuur 11: Gerniddelde laterale positie voor personenauto 's op de linkerrijbaan, waarbij afstandtot de wegas per conditie en situatie wordt weergegeven. (Voor defiguren 11 tIm 14 geldt: Ouden Exp. 3 zijn afkomstig uit de voormeting en betekenen respectievelijk de oorspronkelijke brugen proefvak 3)
1.2
1
0.8
0.6
0.4
0.2
Oud Exp. 3 Nameting
DVrijo Tegenl.
Conditie
Figuur 12: Gemiddelde laterale positie voor personenauto 's op de linkerrijbaan, waarbij afstandtot de rechterzijlijn per conditie en situatie wordt weergegeven.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 25

Personenauto's op rechterrljbaan
1.2
o 0.6—
I
Exp. 3
Conditie
-- DVrij
OTegeni.
Figuur 13: Gemiddelde laterale positie voor personenauto 's op de rechterrijbaan, waarbijafstand tot de wegas per conditie en situatie wordt weergegeven.
Personenauto's op rechterrijbaan
Figuur 14: Gemiddelde laterale positie voor personenauto 's op de rechterrzjbaan, waarbijafstand tot de rechterzzjlijn per conditie en situatie wordt weergegeven.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 26
Oud Nameting
1.2---1.0 1----
0.8
0.4÷---
0.2t---Oud Exp. 3 Nameting
Conditie
personenauto's tot de zijlijn zijn in proefvak 3 en de nameting kleiner dan de oude
situatie (interactie tussen conditie en rijstrook: aistand tot wegas F(2,1351 1) = 193.79; p<0.001 en afstand tot zijlijn F(2,1351 1) = 591.42; p <0.001). In paragraaf 3.2.3 wordtdit interactie-effect uitvoerig besproken.
Bij het interactie-effect tussen conditie en situatie is te zien dat verschillen tussen de
positie van personenauto's met of zonder tegenliggers kleiner zijn bij proefvak 3 en denameting dan bij de oorspronkelijke brug (afstand tot wegas F(2,1351 1) = 57.75; p <0.001 en afstand tot zijlijn F(2,1351 1) = 61.13; p <0.001). Het interactie-effect tussensituatie (wel of geen tegenliggers) en rijstrook is niet gevonden, dus er zijn geenverschillen in laterale positie wanneer er op de linker- of rechterrijstrook al dan niet eentegenligger is.
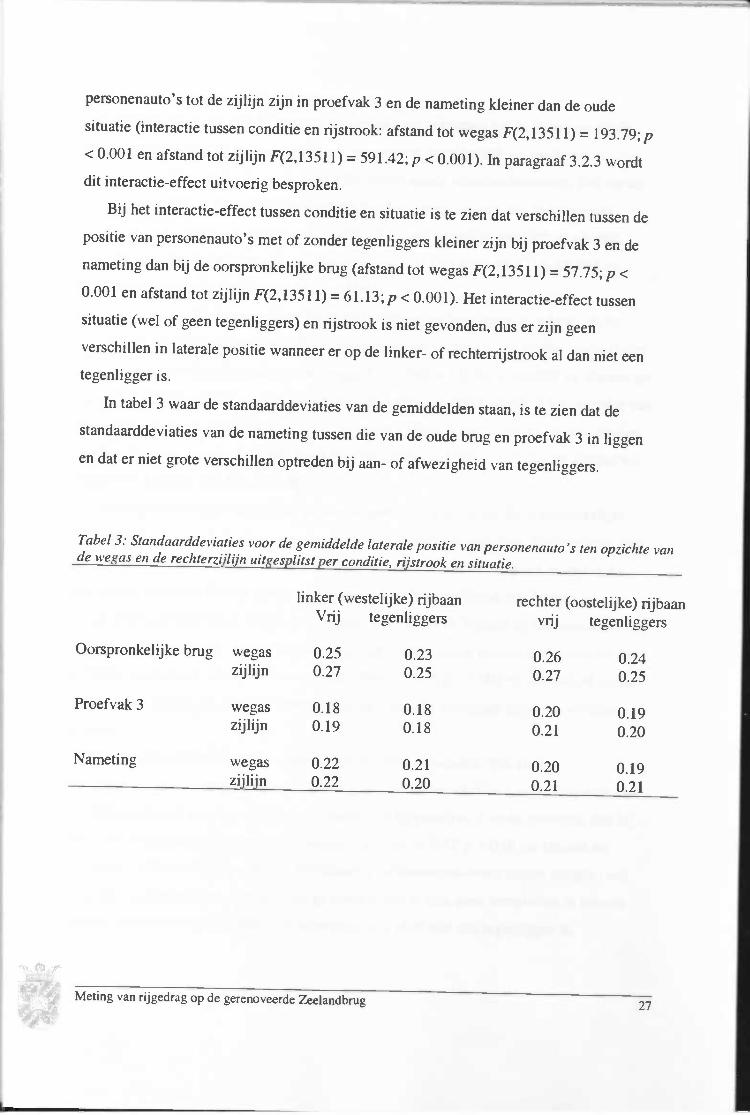
In tabel 3 waar de standaarddeviaties van de gemiddelden staan, is te zien dat de
standaarddeviaties van de nameting tussen die van de oude brug en proefvak 3 in liggenen dat er niet grote verschillen optreden bij aan- of afwezigheid van tegenliggers.
Tabel 3: Standaarddevjatjes voor de gemiddelde laterale positie van personenauto 's ten opzichte vande wegas en de rechterzijlzjn uitgesplitst per conditie, rijstrook en situatie.
linker (westelijke) rijbaan rechter (oostelijke) njbaanVrij tegenliggers vrij tegenhiggers
Oorspronkelijke brug wegas 0.25 0.23 0.26 0.24zijlijn 0.27 0.25 0.27 0.25
Proefvak 3 wegas 0.18 0.18 0.20 0.19zijlijn 0.19 0.18 0.21 0.20
Nameting wegas 0.22 0.21 0.20 0.19zijlijn 0.22 0.20 0.21 0.21
Meting van rijgedrag op de gerenoveerde Zeelandbrug 27

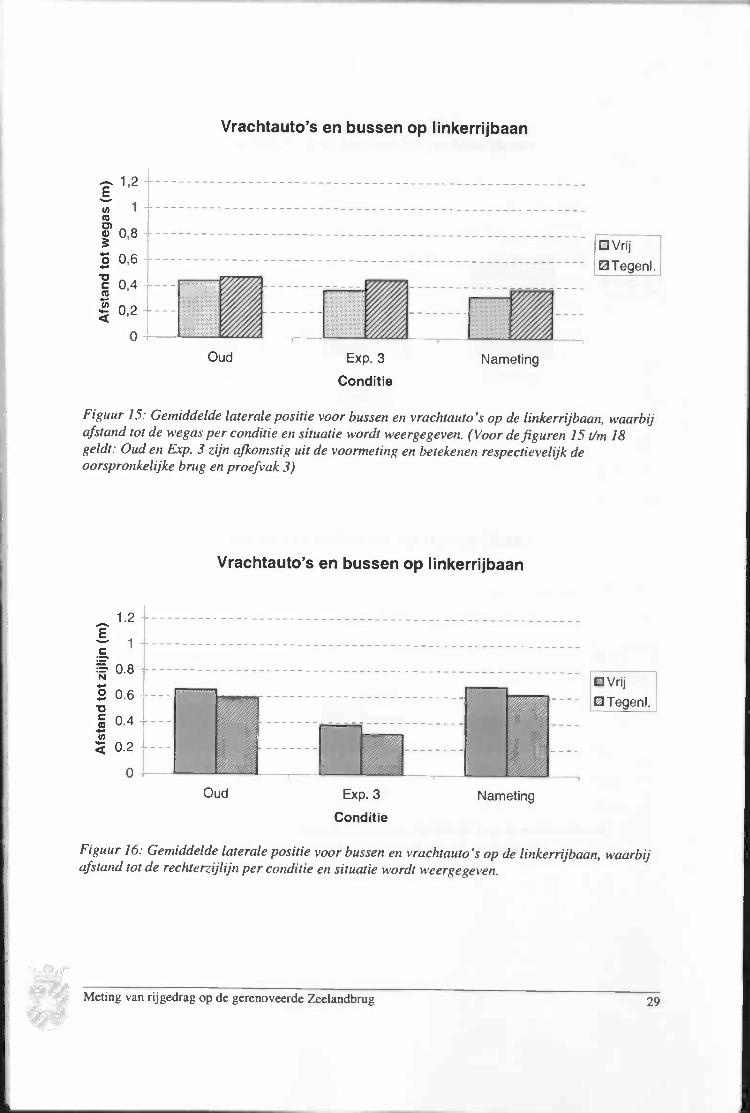
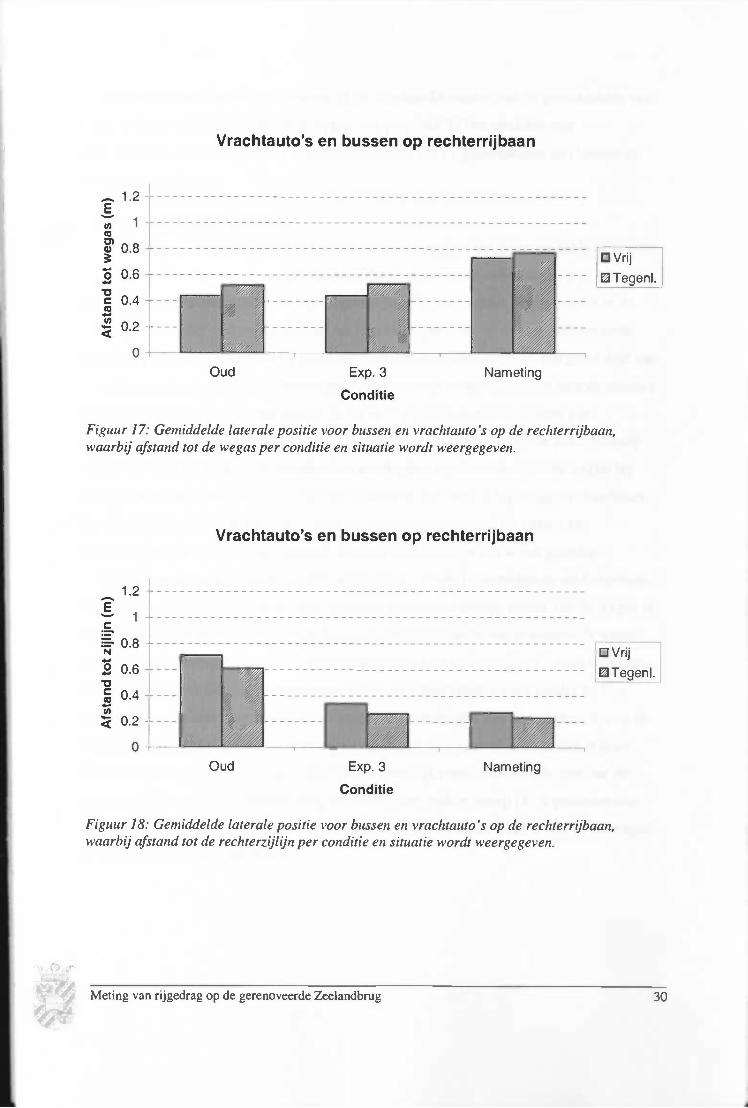
3.2.2 Laterale posirie - bussen en vrachtauto'sIn de figuren 15 tot en met 18 worden de gemiddelde afstanden tot de wegas en tot de
rechterzijlijn per rijstrook, per conditie en per situatie voor bussen en vrachtauto's
weergegeven. Daaronder staan in tabel 4 de bijbehorende standaarddeviaties. Net als bij
de personenauto's is te zien dat de aanwezigheid van tegenliggers een toename van
afstand tot aan de wegas en afname van afstand tot aan de zijlijn met zich meebrengt
(hoofdeffect van verkeerssituatie: afstand tot wegas F(1,1786) = 28.87; p <0.001 en
afstand tot zijlijn F(1,1786) = 29.24; p <0.001).
Bussen en vrachtwagens rijden op de linkerrijbaan dichter tegen de wegas aan in
vergelijking met de voertuigen op de rechterrijbaan die dichter bij de rechterzijlijn rijden
(hoofdeffect van rijstrook: afstand tot wegas F(1,1786) = 151.46; p <0.001 en aistand tot
zijlijn F(1 ,1786) = 38.71; p <0.001). Net als bij personenauto's wordt er ten opzichte van
de originele brug in proefvak 3 en in de nameting dichter bij de zijlijn en wegas gereden
(hoofdeffect van conditie: afstand tot wegas F(2,1786) = 27.47; p <0.001 en aistand tot
zijlijn F(2,1786) = 533.51;p <0.001).
In de grafieken zijn verschillen in laterale positie te zien tussen de oorspronkelijke
brug, proefvak 3 en de huidige situatie en op welke rijstrook men rijdt. Ten opzichte van
de oude situatie is de afstand tot de wegas op de rechterrijstrook vergroot en dus is de
afstand tot de zijlijn kleiner geworden. Echter op de linkerrijstrook zijn bussen en
vrachtauto's dichter bij de wegas gaan rijden en in proefvak 3 rijden ze ten opzichte van
de oorspronkelijke brug verder van de zijlijn dan in de huidige situatie (interactie tussen
conditie en rijstrook: afstand tot wegas F(2,1786) = 30.8; p <0.001 en afstand tot zijlijn
F(2,1786) = 80.68; p <0.001). Hierop zal in de volgende paragraal dieper in worden
gegaan.
Het tweede interactie-effect is dat tussen conditie en situatie. Net als bij
personenauto's is in de grafieken zichtbaar gemaakt dat verschillen tussen de positie van
voertuigen met of zonder tegenliggers kleiner zijn bij proefvak 3 en de nameting dan bij
de oorspronkelijke brug (afstand tot wegas F(2,1786) = 5.52; p < 0.01 en aistand tot
zijlijn F(2,1786) = 6.51; p <0.01). Wederom is het interactie-effect tussen situatie (we!
of geen tegenliggers) en rijstrook niet gevonden, dus er zijn geen verschillen in laterale
positie wanneer er op de linker- of rechterrijstrook al of niet een tegenligger is.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 28
Vrachtauto's en bussen op Iinkerrijbaan
Exp. 3 Nameting
Conditle
Figuur 15: Gemiddelde laterale positie voor bussen en vrachtauto 's op de linkerrijbaan, waarbijafstand tot de wegas per conditie en situatie wordt weergegeven. (Voor defiguren 15 tIm 18geldt: Oud en Exp. 3 zijn afkomstig uit de voormeting en betekenen respectievelijk deoorspronkelijke brug en proefvak 3)
1.2I1
C
0.820.6C
Vrachtauto's en bussen op Iinkerrijbaan
Meting van rijgedrag op de gerenoveerde Zeelandbrug
-
1
0,8DVrij
6 0,6 Olegeni.•0C 0,4 ---
0
Oud
-- DVrij- OTegeni.
0
Oud Exp. 3 Nameting
Conditie
Figuur 16: Gemiddelde laterale positie voor bussen en vrachtauto 's op de linkerrijbaan, waarbijafstand tot de rechterzqlijn per conditie en situatie word: weergegeven.
29
Vrachtauto's en bussen op rechterriJbaan
1.2 -
1 -
0.8 — - - - -•Vrij
°.6t OTegeni.
0.4—---
0.2 ---- --
Exp. 3 Nameting
Conditie
Exp. 3 Nameting
Conditie
0)
4-04-0C4-
Oud
Figuur 17: Gemiddelde laterale positie voor bussen en vrachtauto 's op de rechterrijbaan,waarbij afstand tot de wegas per conditie en situatie wordt weergegeven.
Vrachtauto's en bussen op rechterrljbaan
1.2 ± --I•- 1C
DVrij0.6 olegeni.0.4 -i----
0.2-----
Oud
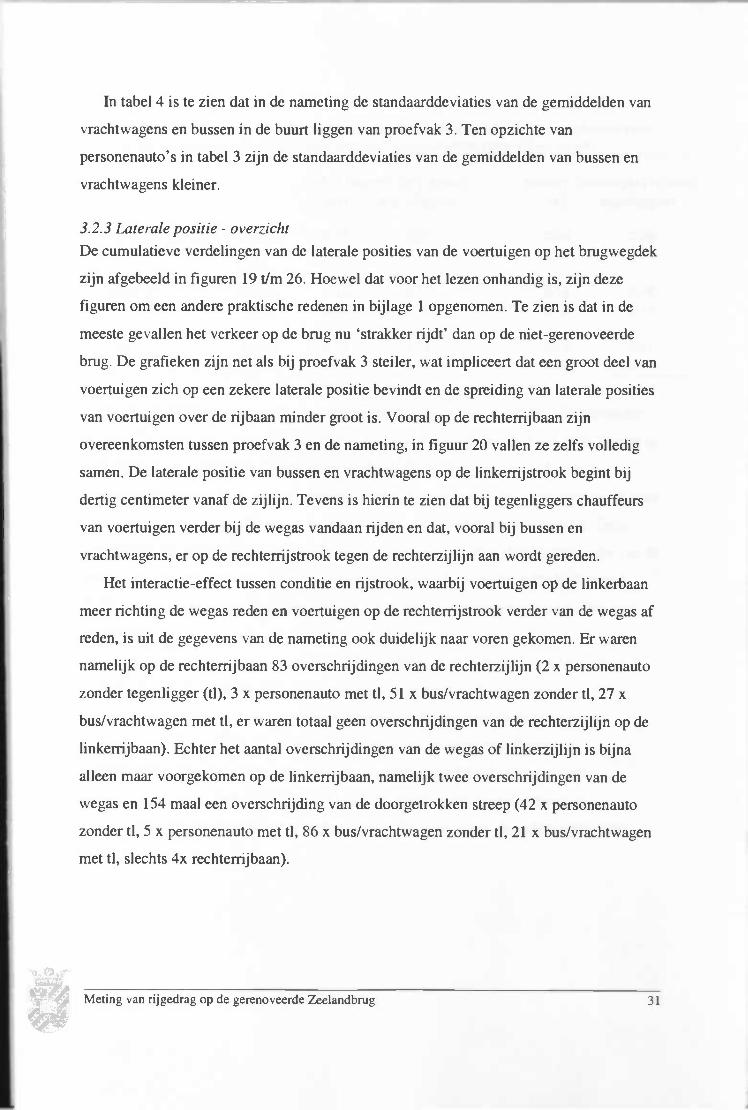
Figuur 18: Gemiddelde laterale positie voor bussen en vrachtauto 's op de rechtemjbaan,waarbij afstand tot de rechterzijlijn per conditie en situatie wordt weergegeven.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 30
In tabel 4 is te zien dat in de nameting de standaarddeviaties van de gemiddelden van
vrachtwagens en bussen in de buurt liggen van proefvak 3. Ten opzichte van
personenauto's in tabel 3 zijn de standaarddeviaties van de gemiddelden van bussen en
vrachtwagens kleiner.
3.2.3 Laterale positie - overzicht
De cumulatieve verdelingen van de laterale posities van de voertuigen op het brugwegdek
zijn afgebeeld in figuren 19 tIm 26. Hoewel dat voor het lezen onhandig is, zijn deze
figuren om een andere praktische redenen in bijiage 1 opgenomen. Te zien is dat in de
meeste gevallen het verkeer op de brug flu 'strakker rijdt' dan op de niet-gerenoveerde
brug. De grafieken zijn net als bij proefvak 3 steiler, wat impliceert dat een groot dee! van
voertuigen zich op een zekere laterale positie bevindt en de spreiding van laterale posities
van voertuigen over de rijbaan minder groot is. Vooral op de rechterrijbaan zijn
overeenkomsten tussen proefvak 3 en de nameting, in figuur 20 vallen ze zelfs volledig
samen. De laterale positie van bussen en vrachtwagens op de Iinkerrijstrook begint bij
dertig centimeter vanaf de zijlijn. Tevens is hierin te zien dat bij tegenhiggers chauffeurs
van voertuigen verder bij de wegas vandaan njden en dat, vooral bij bussen en
vrachtwagens, er op de rechterrijstrook tegen de rechterzijlijn aan wordt gereden.
Het interactie-effect tussen conditie en rijstrook, waarbij voertuigen op de linkerbaan
meer richting de wegas reden en voertuigen op de rechterrijstrook verder van de wegas af
reden, is uit de gegevens van de nameting ook duidelijk naar voren gekomen. Er waren
name!ijk op de rechterrijbaan 83 overschrijdingen van de rechterzij!ijn (2 x personenauto
zonder tegenhigger (t!), 3 x personenauto met tI, 51 x bus/vrachtwagen zonder U, 27 x
bus/vrachtwagen met t!, er waren totaal geen overschnjdingen van de rechterzijlijn op de
Iinkerrijbaan). Echter het aanta! overschrijdingen van de wegas of linkerzij!ijn is bijna
alleen maar voorgekomen op de Iinkemjbaan, name!ijk twee overschnjdingen van de
wegas en 154 maal een overschrijding van de doorgetrokken streep (42 x personenauto
zonder ti, 5 x personenauto met tI, 86 x bus/vrachtwagen zonder tI, 21 x bus/vrachtwagen
met t!, s!echts 4x rechterrijbaan).
Meting van rijgedrag op de gerenoveerde Zeelandbrug 31
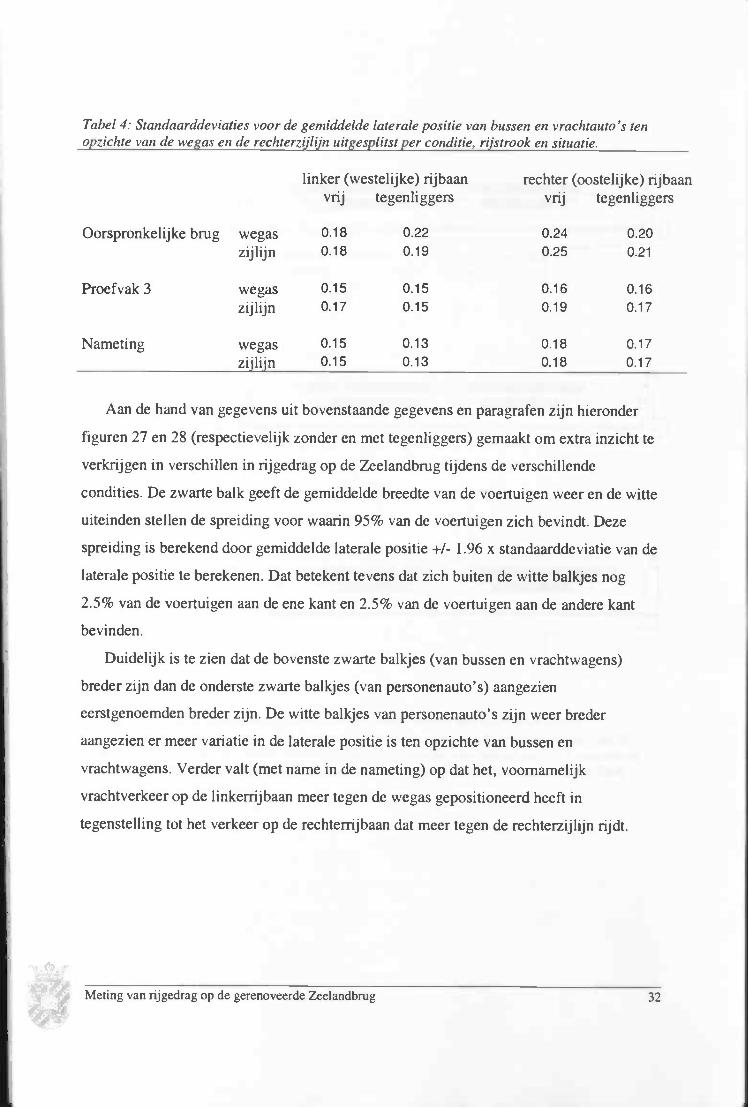
Tabel 4: Standaarddeviaties voor de gemiddelde laterale positie van bussen en vrachtauto 's tenopzichte van de wegas en de rechterzijlijn uitgesplitst per conditie, rijstrook en situatie.
linker (westelijke) rijbaan rechter (oostelijke) rijbaanvrij tegenhiggers vnj tegenliggers
Oorspronkelijke brug wegas 0.18 0.22 0.24 0.20zijlijn 0.18 0.19 0.25 0.21
Proefvak 3 wegas 0.15 0.15 0.16 0.16zijlijn 0.17 0.15 0.19 0.17
Nameting wegas 0.15 0.13 0.18 0.17zijlijn 0.15 0.13 0.18 0.17
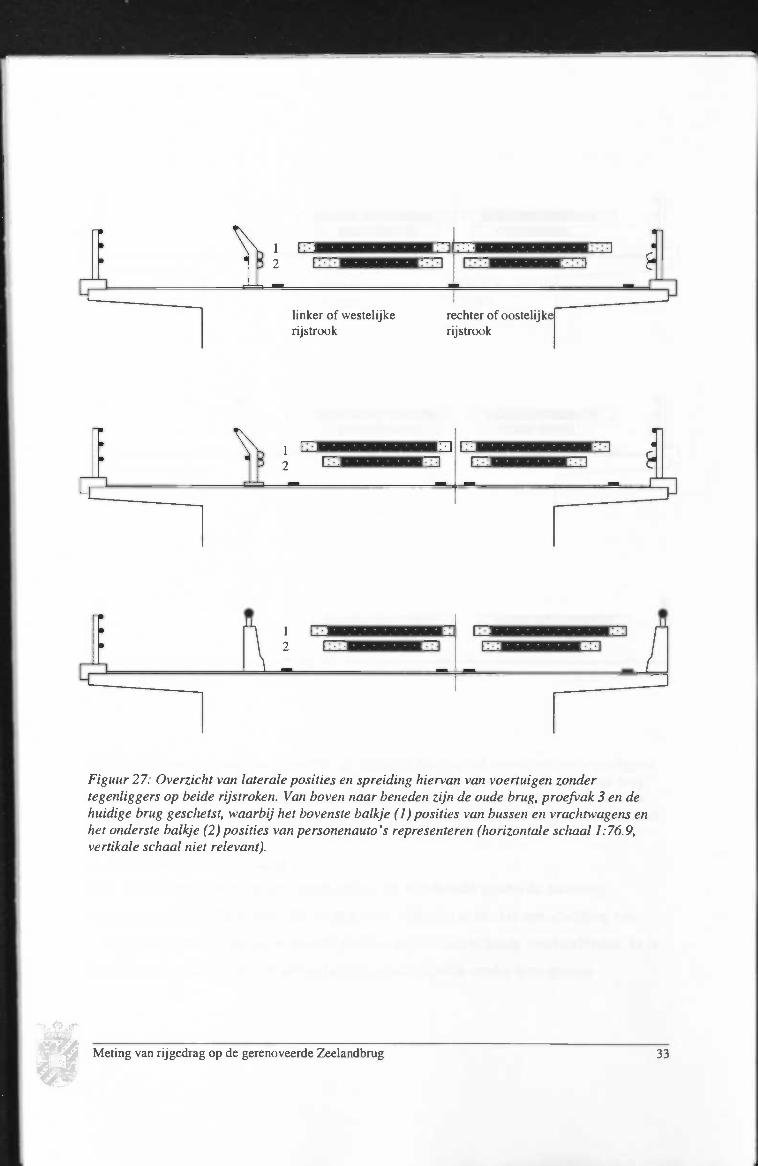
Aan de hand van gegevens uit bovenstaande gegevens en paragrafen zijn hieronder
figuren 27 en 28 (respectievelijk zonder en met tegenhiggers) gemaakt om extra inzicht te
verkrijgen in verschillen in rijgedrag op de Zeelandbrug tijdens de verschihlende
condities. De zwarte balk geeft de gemiddelde breedte van de voertuigen weer en de witte
uiteinden stellen de spreiding voor waarin 95% van de voertuigen zich bevindt. Deze
spreiding is berekend door gemiddelde laterale positie +1- 1.96 x standaarddeviatie van de
laterale positie te berekenen. Dat betekent tevens dat zich buiten de witte balkjes nog
2.5% van de voertuigen aan de ene kant en 2.5% van de voertuigen aan de andere kant
bevinden.
Duidelijk is te zien dat de bovenste zwarte balkjes (van bussen en vrachtwagens)
breder zijn dan de onderste zwarte balkjes (van personenauto's) aangezien
eerstgenoemden breder zijn. Dc witte balkjes van personenauto's zijn weer breder
aangezien er meer variatie in de laterale positie is ten opzichte van bussen en
vrachtwagens. Verder vail (met name in de nameting) op dat het, voornamelijk
vrachtverkeer op de hinkerrijbaan meer tegen de wegas gepositioneerd heeft in
tegenstelhing tot het verkeer op de rechterrijbaan dat meer tegen de rechterzijhijn rijdt.
Meting van njgedrag op de gerenoveerde Zeelandbrug 32
Meting van rijgedrag op de gerenoveerde Zeelandbrug 33
linker of westelijkerijstrook
rechter of oostelijlnjstrook
rr.
Figuur 27: Overzicht van laterale posities en spreiding hiervan van voertuigen zondertegenliggers op beide rijstroken. Van boven naar beneden zijn de oude brug. proefvak 3 en dehuidige brug geschetst, waarbij het bovenste balkje (1) posities van bussen en vrachtwagens enhet onderste balkje (2) posit ies van personenauto 's representeren (horizontale schaal 1:76.9,vertikale schaal niet relevant).
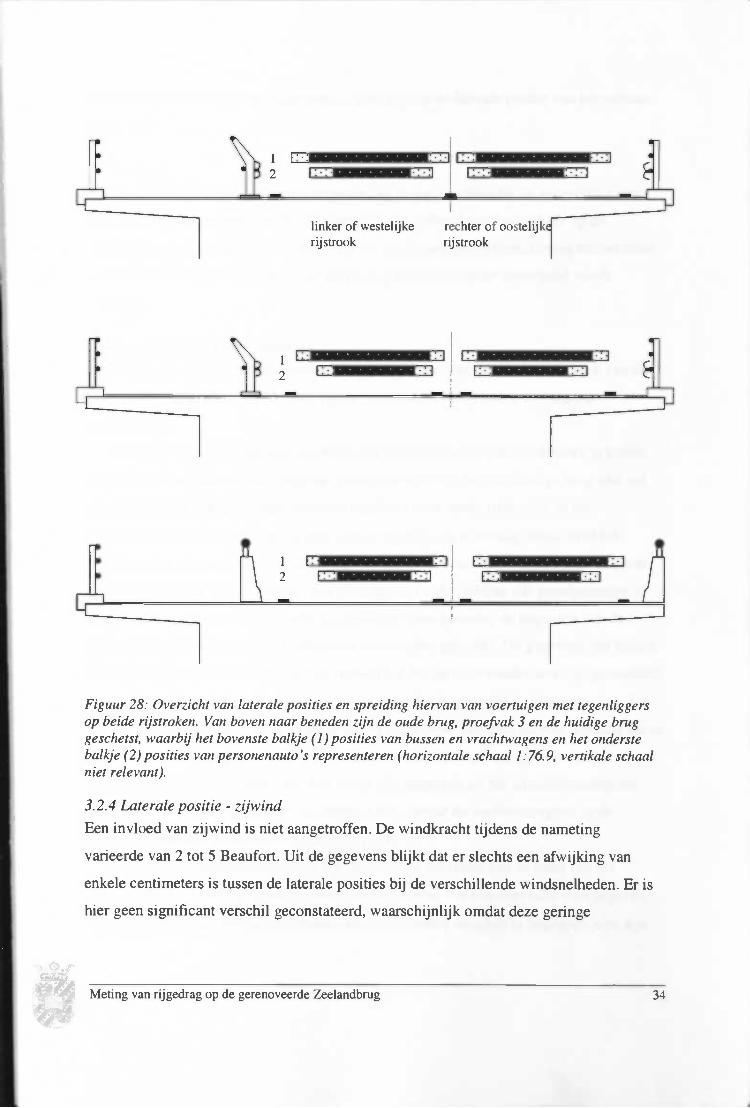
3.2.4 Laterale positie - zijwindEen invloed van zijwind is niet aangetroffen. De windkracht tijdens de nameting
varieerde van 2 tot 5 Beaufort. Uit de gegevens blijkt dat er slechts een alwijking van
enkele centimeters is tussen de laterale posities bij de verschillende windsnelheden. Er is
hier geen significant verschil geconstateerd, waarschijnlijk omdat deze geringe
Meting van rijgedrag op de gerenoveerde Zeelandbrug 34
linker of westelijkerijstrook rijstrook
1
2 I I..-l
r-.
Figuur 28: Overzicht van laterale posities en spreiding hiervan van voertuigen met tegenliggersop beide rijstroken. Van boven naar beneden zijn de oude brug, proefvak 3 en de huidige bruggeschetst, waarbij het bovenste balkje (1) posities van bussen en vrachtwagens en het onderstebalkje (2) posities van personenauto 's representeren (horizontale schaal 1:76.9, vertikaje schaalniet relevant).
windsnelheden niet of nauwelijks van invloed zijn op de laterale positie van bet verkeer
op de weg.
3.3 Sneiheid
Snelheidsmetingen zijn gedurende de nameting in tegenstelling tot de voormeting niet
verricht. Om aan de hand van de videobeelden de sneiheid van het verkeer op de
Zeelandbrug te kunnen bepalen, zijn beelden zonder perspectiefvertekening en met meer
details noodzakelijk. Vandaar dat in dit versiag niet nader op de rijsnelheid wordt
ingegaan.
3.4 Vergelzjking nzet simularordata
In dit gedeelte worden de resultaten uit het gedeelte van het simulatoronderzoek van de
voormeting vergeleken met de data van de nameting. Hierbij horen de volgende
opmerkingen:
Als vergelijkingsmateriaal is voor altematief 2 uit het simulatoronderzoek gekozen,
aangezien deze gesimuleerde brug het meest overeenkomt met de huidige brug (dat wil
zeggen dubbele doorgetrokken streep en een bijna even brede rijstrook). In bet
simulatoronderzoek waren steeds regelmatig tegenliggers aanwezig, maar werd het
rijgedrag niet uitgesplitst op de aan- of afwezigheid hiervan. Vandaar dat deze data van
de huidige meting over dit aspect zijn gemiddeld. Verder hebben alle proefpersonen in
het simulatoronderzoek op de rechter (oostelijke) baan gereden, de gegevens van de
linkerrijbaan uit deze nameting zullen dus niet worden gebruikt. Dc gegevens van bussen
en vrachtwagens die afzonderlijk zijn verwerkt in het simulatoronderzoek zijn gemiddeld,
aangezien er geen onderscheid tussen voorgenoemden is gemaakt in deze nameting. Uit
§ 3.2.4 is gebleken dat zijwind in de nameting nauwelijks van invloed was, vandaar dat in
deze vergelijking de gegevens van de conditie zonder invloed van zijwind van het
simulatoronderzoek gebruikt zijn. Ten slotte zijn gegevens uit het simulatoronderzoek
gebruikt van de snelheidslimiet van tachtig km/u, omdat dit snelheidsregime in de
werkelijke situatie van deze nameting ook gold.
De betrouwbaarheidsintervallen van de data zijn berekend aan de hand van het
gemiddelde +1- 1.96*SD/1(aanta1 observaties). In tabel 5 is een overzicht weergegeven.
Aangezien deze betrouwbaarheidsintervallen cijfermatig moeilijk te begrijpen zijn, zijn
Meting van rijgedrag op de gerenoveerde Zeelandbrug 35

de intervallen voor het simulatoronderzoek van de voormeting en de nameting in figuur
29 weergegeven als spreidingsmaten.
Tabel 5: Betrouwbaarheidsintervallen voor het simulatoronderzoek uit de voormeting en denameting, waarbij de getallen van het interval respecrievelijk afstand tot de wegas en afstand totde rechterzijlijn voorstellen.
Personenauto' s bussen en vrachtauto' s
Simulatoronderzoek van 0.36 tot 0.95 m van 0.13 tot 0.48 m
Nameting van 0.95 tot 0.82 m van 0.72 tot 0.24 m
Het betrouwbaarheidsinterval van de nameting van personenauto's beslaat een
kleinere ruimte dan het vergelijkbare betrouwbaarheidsinterval van het
simulatoronderzoek. Te zien is dat er een grotere spreiding is bij personenauto's in het
simulatoronderzoek ten opzichte van vrachtauto's en bussen in het simulatoronderzoek.
Verder is bij de berekening van betrouwbaarheidsintervallen bijna geen spreiding
geconstateerd bij de nameting.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 36
Personenauto simulatorPersonenauto nameting
I
—
Vrachtauto/bus simulatorVrachtaut&bus nameting
Figuur 29: Betrouwbaarheidsintervallen van het simulatoronderzoek en de nametingweergegeven als spreidingsmaten, met boven de gegevens van personenauto 's en onder gegevensvan bussen en vrachtwagens.
4. Discussie
In het huidige onderzoek is, met behuip van een camera aan de zijkant van de weg
gemonteerd op een constructie op de fietsstrook van de Zeelandbrug, gekeken naar
laterale posities van personenauto's, bussen en vrachtauto's njdend over deze brug. Er is
met name gekeken naar aan- of afwezigheid van tegenliggers en op welke rijstrook men
reed. Deze gegevens zijn vergeleken met gegevens van de oorspronkelijke brug en met
proefvak 3 in de pi!otstudie van de voormeting (Steyvers & van Wolffelaar, 1998).
Daarnaast is een verge!ijking gemaakt met een gesimuleerde brugvariant in genoemd
onderzoek.
Voor zowel personenauto's als bussen en vrachtauto's zijn de hoofdeffecten van
rijstrook en aan- of afwezigheid van tegenhiggers duidelijk naar voren gekomen. Het
verschil tussen rijden op de linker- of rechterrijstrook heeft hoogstwaarschijnlijk te
maken met de, toch we! imposante constructie op de fietsstrook, gebruikt voor het
onderhoud van de Zeelandbrug. Waarschijn!ijk is de inv!oed van de constructie dusdanig
dat chauffeurs van voertuigen hiermee rekening houden en vervolgens de positie van hun
voertuig op de weg aanpassen, wat ook is gebleken uit onderzoeken van Lisle &
Hargroves (1980) en Jessurun et al (1990). Het verkeer op de linkerrijstrook rijdt
namelijk meer tegen de wegas aan en het verkeer op de rechterrijstrook rijdt meer tegen
de zij!ijn aan. In de voormeting was deze constructie ook aanwezig, echter toen bestond
de constructie ook uit een dee! boven en een deel aan de ooste!ijke kant van de brug, dus
toen was het gehee! meer symmetrisch.
Tevens is de inv!oed van tegen!iggers bij personenauto's, bussen en vrachtauto's te
zien. Op zowel de linker- als rechterrijstrook wordt bij de verkeerssituatie met
tegenhiggers een beweging in de nchting van de rechterzijlijn gemaakt. Deze invloed van
tegenliggers op de latera!e positie van voertuigen was ook te zien in de onderzoeken van
onder andere Summala et al. (1981) en Triggs (1980, 1997). Tijdens het analyseren van
de video's is de suggestie ontstaan dat de hoedanigheid van de tegen!igger van inv!oed
zou kunnen zijn. Wanneer de tegenligger een vrachtwagen of bus is, kan het zijn dat de
invloed op het njgedrag groter is dan wanneer de tegen!igger een personenauto is. Zoa!s
in de in!eiding is gesuggereerd, is de aanwezigheid van fysieke objecten in de
wegomgeving (bijvoorbeeld de tegenliggers en barriers) van grotere invloed dan de
Meting van rijgedrag op de gerenoveerde Zeelandbrug 37
A
belijning, doordat 'koersfouten bij tegenliggers en barriers, leuningen of wegranden
grotere implicaties kunnen hebben in vergelijking met koersfouten gemaakt bij het
koershouden tussen belijning'.
Bij zowel personenauto's als bij bussen en vrachtauto's is dichter bij de wegas en
dichter bij de zijlijn gereden. Dit komt doordat ten opzichte van de oorspronkelijke brug
in proefvak 3 uit voormeting en in de huidige situatie er smallere rijstroken zijn.
Bij het interactie-effect van conditie en njstrook bij personenauto's is te zien dat
zowel afstand tot de zijlijn als afstand tot de wegas toeneemt. Dit komt waarschijnlijk
door perspectiefvertekening aangezien de camera zich niet boven maar aan de zijkant van
de brug beyond. Om dit te ondervangen is voor de breedte van vrachtwagens en bussen
een standaard-waarde genomen. Het was echter zeer moeilijk om breedtes van
personenauto's te standaardiseren, aangezien deze breedtes kunnen vanëren van ruim één
tot twee meter. Het gevoig is dat de gemiddelde breedte van personenvoertuigen
ongeveer tien centimeter lager uitviel dan tijdens de voormeting, wat consequenties kan
hebben voor het onderzoek, bijvoorbeeld een verschoven of verkeerde laterale positie van
het verkeer. In het nog uit te voeren tweede deel van de nameting komt dit probleem niet
meer naar voren, want dan wordt de camera, net als in de voormeting boven de weg
gemonteerd.
Ten opzichte van de oude situatie zijn de laterale positie-verschillen tussen de aan- of
afwezigheid van tegenliggers kleiner geworden, zoals bij de interactie tussen conditie en
verkeerssituatie te zien is. Aangezien onder andere slingergedrag een maat is voor
veiligheid op de brug, is de huidige situatie waarbij minder dan vroeger wordt
uitgeweken voor tegenhiggers, veiliger. Dit zou kunnen komen door de duidehijke
belijning, die ook een acoustische component heeft bij overschrijdingen. Bij
lijnoverschrijdingen krijgt de bestuurder van het voertuig auditieve feedback over de
laterale positie van bet voertuig op de weg. Deze belijning speelt hoogstwaarschijnlijk
een grote rol bij de interactie tussen conditie en rijstrook bij bussen en vrachtwagens.
Voorgenoemden njden ten opzichte van personenauto's meer tegen de zijlijn op de
rechterrijstrook (zie figuren 17 en 18), waarbij het zou kunnen dat de acoustische
belijning dient als referentiepunt voor een veilige laterale positie op de weg. Daarnaast
wekken de gegevens uit paragraaf 3.2.3, waarin te zien is dat met name bussen en
Meting van rijgedrag op de gerenoveerde Zeelandbrug 38
vrachtwagens tegen de belijning aan njden, de indruk dat door aanwezigheid van
acoustische belijning op de huidige brug minder lijnoverschrijdingen plaatsvinden (zie
figuren 27 en 28). In de inleiding is de relatie tussen waameming en aandacht en fouten
in het verkeer beschreven aan de hand van een artikel van Smiley (1989). Zij vermeldt
dat van de fouten die bestuurders van motorvoertuigen maken, ruim vijftig procent van
deze fouten bestaan uit aandachts- en waamemingsfouten en slechts tien procent uit
reactiefouten. Wanneer de belijning met acoustische effecten bij lijnoverschrijdingen
ervoor zorgt dat bij het overschrijden van de belijning de chauffeur meteen z'n aandacht
weer heeft gericht op de weg, kunnen in vergelijking met de oorspronkelijke brug
ongelukken eerder voorkomen worden. Het ziet er dus naar uit dat de laterale positie van
voertuigen tussen de belijning op de huidige Zeelandbrug veiliger is dan bij de originele
situatie of zelfs bij de pilots van de voormeting.
Uit de videoregistratie is verder gebleken dat wanneer twee personenauto's dicht
achter elkaar rijden, het achterste voertuig ten opzichte van het voorste voertuig dichter
bij de wegas rijdt. Voor de tweede nameting of mogelijk vervolgonderzoek kan het
relevant zijn dit te registreren en mee te nemen als beInvloedende factor van laterale
positie van voertuigen op de weg. Tevens zou de invloed van de klapbrug en daarmee
gepaard gaand de grote hoeveelheid verkeer op ofwel de linker- of rechterrijbaan kunnen
worden meegenomen. Snelheidsmetingen zouden in de tweede nameting of in een
mogelijk vervolgonderzoek nog verricht kunnen worden. Zo kan gekeken worden wat de
sneiheid is van het verkeer dat over de Zeelandbrug rijdt en of men zich daadwerkelijk
aan de snelheidslimiet van tachtig km/u houdt. Deze snelheidslimiet brengt in
vergelijking met de snelheidslimiet van honderd km/u een veiliger situatie met zich mee,
aangezien dan zowel personenauto's als bussen en vrachtauto's dezelfde snelheid kunnen
en moeten rijden en er dan minder chauffeurs van personenauto's zijn die de drang
kunnen hebben om bijvoorbeeld een vrachtauto in te halen.
Ten slotte wordt nog kort ingegaan op het simulatoronderzoek uit voormeting. Er is
bijna geen spreiding geconstateerd bij de nameting. Aangezien met grote aantallen
observaties is gewerkt, wordt de spreiding bijna gereduceerd tot nul. In de simulator is
uitsluitend de visuele situatie van de Zeelandbrug geImplementeerd. Het ontbreken van
acoustische effecten bij Iijnoverschnjdingen in het simulatoronderzoek, kan een
Meting van rijgedrag op de gerenoveerde Zeelandbrug 39
verkJaring zijn voor de verschillen tussen de simulatormeting en deze videometing op de
echte brug.
In de voormeting is gekeken naar de invloed van verschillende wegbreedtes op bet
rijgedrag op de Zeelandbrug. Achteraf blijkt dat de wegbreedte toch nagenoeg behouden
kon blijven, zodat effecten vooral aan belijningsverandenngen en de aanwezigheid van
de barriers kunnen worden toegeschreven.
5. Conclusie
Aanbevelingen uit de vooronderzoeken waren: breng een dubbele doorgetrokken streep
aan op de wegas, probeer de rijstroken zo breed mogelijk te maken en zorg voor een
belijning met acoustische effecten bij overschrijdingen. Uit de huidige meting kan
worden opgemaakt dat ten opzichte van de oude situatie het verkeer beter tussen de
belijning is gaan rijden. Verder is bet veiliger dan vroeger om over de Zeelandbrug te
rijden door onder andere een enorme reductie van het aantal inhaalmanoeuvres op de
brug en door minder slingergedrag van met name bussen en vrachtwagens bij
tegenliggers ten opzichte van de oude brug, waardoor de kans op ongevallen met
vrachtwagens en bussen kleiner is.
Echter de invloed van de constructie brengt wel met zich mee dat bet verkeer op de
linker (westelijke) rijstrook meer tegen de wegas aanrijdt. Als gevolg van
perspectiefvertekening is een tweede nameting noodzakelijk met een camera recht boven
de rijbaan. Hierbij zouden tevens snelheidsmetingen kunnen worden uitgevoerd.
Aan bet begin van dit versiag is het algemene dod van het besturen van een voertuig
omschreven als: 'Het op de plaats van bestemming komen, zonder daarbij ongelukken te
veroorzaken (Van der Huist, 1999).' Om er aan bij te dragen dat bestuurders dit doel
kunnen nastreven en uitvoeren, is een voorlopig advies naar aanleiding van deze eerste
nameting: zorg voor een goed onderhoud van de acoustische belijning.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 40
6. Literatuur
Allen, R.W., & McRuer, D.T. (1977). The effect of adverse visibility on driver steering
performance in an automobile simulator. Society of automotive engineers, SAE
paper 770239, Detroit.
Allen, R.W., O'Hanlon, J.F., McRuer, D.T. et a!. (1977). Driver's visibility requirements
for roadway delineation. Vol. 1: Effects of contrast and configuration on driver
performance and behavior. FHWA-report FHWA-RD-77-165. Hawthorne, CA:
STI.
Baxter, J., & Harrison, J.Y. (1979). A nonlinear model describing driver behavior on
straight roads. Human Factors, 21, 87-97.
Blaauw, G.J. (1985). Vehicle guidance by delineation systems at night. Ergonomics,
28(12), 1601-1615.
BjOrkman, M. (1963). An exploratory study of predictive judgments in a traffic situation.
Scandinavian journal of psychology, 4, 65-76.
Brookhuis, K.A. (1989). Taakanalyses. In: C.W.F. van Knippenberg, J.A. Rothengatter &
J.A. Michon, Handboek sociale verkeerskunde. Assen: van Gorcum.
Brown, I.D. (1990). Accident reporting and analysis. In: J.R. Wilson & E.N. Corlett,
Evaluation of human work: a practical ergonomics methodology. Philadelphia:
Taylor & Francis.
Carson, J.M., & Wierwille, W.W. (1978). Development of a strategy model of the driver
in lane keeping. Vehicle system dynamics, 7, 223-253.
DeFazio, K., Wittman, D., & Drury, C.G. (1992). Effective vehicle width in self-paced
tracking. Applied ergonomics, 23(6), 382-386.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 41
Dc Waard, D., Jessurun, M., Steyvers, F.J.J.M., Raggatt, P.T.F., & Brookhuis, K.A.
(1995). Effect of road layout and road environment on driving performance,
drivers' physiology and road appreciation. Ergonomics, 38(7), 1395-1407.
Dinnissen, V. (1999). Nadere analyse van het rzjgedrag op de Zeelandbrug. Stageverslag.
Groningen: Rijksuniversiteit Groningen.
Godthelp, J. (1984). Studies on human vehicle control. Utrecht: drukkerij Elinkwijk By.
Godthelp, J. (1989). De rijtaak in een auto. In: C.W.F. van Knippenberg, J.A.
Rothengatter & J.A. Michon, Handboek sociale verkeerskunde. Assen: van
Gorcum.
Godthelp, J., & Konings, H. (1981). Levels of steering control: some notes on the time to
line crossing concept as related to driving strategy. Proceedings first european
annual conference on human decision making and manual control. Deift, The
Netherlands, 373-357.
Godthelp, J., & Riemersma, J.B.J. (1982). The vehicle guidance in road workzones.
Ergonomics, 25(10), 909-916.
Hackman, J.R. (1969). Toward understanding the role of tasks in behavioural research.
Acta psychologica, 31, 97-128.
Hale, A.R., Stoop, J., & Hommels, J. (1990). Human error models as predictors of
accident scenarios for designers in road transport systems. Ergonomics, 33(10-
11), 1377-1387.
Helander, M. (1978). Drivers' steering behavior during traffic events: a case of
perceptual tropism? Human factors, 20, 68 1-690.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 42
Hildreth, E.C., Beusmans, J.M.H., Boer, E.R., & Royden, C.S. (2000). From vision to
action: experiments and models of steering control during driving. Journal of
experimental psychology: human perception and performance, 26(3), 1106-1132.
Hughes, P.K., & Cole, B.L. (1988). The effect of attentional demand on eye movement
behaviour when driving. In: A.G. Gale et al. (Eds), Vision in vehicles II.
Amsterdam: Elsevier, North Holland.
Janssen, W.H. (1979). Routeplanning en geleiding: Een literatuurstudie. Soesterberg:
Instituut voor Zintuigfysiologie TNO. Rapport IZF 1979 C-13.
Jessurun, M., Steyvers, F.J.J.M., De Waard, D., Dekker, K., & Brookhuis, K.A. (1990).
Beleving, waarneming en activatie tijdens het rijden over een deel van de A2.
Haren: Verkeerskundig Studiecentrum, Rijksuniversiteit Groningen. Rapport VK
90-18.
Kao, H.S.R., & Nagamachi, M. (1969). Visual-manual feedback mechanism in human
vehicular performance. Ergonomics, 12(5), 741-751.
Lemke, M. (1982). Correlation between EEG and driver's actions during prolonged
driving under monotonous conditions. Accident analysis and prevention, 14 (1),
7-17.
Lenné, M.G., Tnggs, T.J., & Redman, J.R. (1997). Time of day variations in driving
performance. Accident analysis and prevention, 29(4), 431-437.
Lisle, F.N., & Hargroves, B.T. (1980). Evaluation of the performance of portable precast
concrete traffic bathers. Transportation research record, 769, 30-37.
Meting van njgedrag op de gerenoveerde Zeelandbrug 43
McKnight, A.S., McKnight, A.J., & Tippetts, A.S. (1998). The effect of lane line width
and contrast upon lanekeeping. Accident analysis and prevention, 30(5), 617-624.
Michon, J.A. (1985). A critical view of driver behavior models: what do we know, what
should we know? In: L.A. Evans & R.C. Swing (Eds), Human behavior and
traffic safely. New York: Plenum press.
Michon, J.A. (1989). Modellen van bestuurdersgedrag. In: C.W.F. van Knippenberg, J.A.
Rothengatter, & J.A. Michon, Handboek sociale verkeerskunde (pp 207-23 1).
Assen: Van Gorcum.
Mourant, R.R., & Rockwell, T.H. (1970). Mapping eye-movement patterns to the visual
scene in driving: an exploratory study. Human factors, 12, 81-87.
Mourant, R.R., & Rockwell, T.H. (1972). Strategies of visual search by novice and
experienced drivers. Human factors, 14, 325-335.
O'Hanlon, J.F., Haak, T.W., Blaauw, G.J., & Riemersma, J.B.J. (1982). Diazepam
impairs lateral position control in highway driving. Science, 217, 79-8 1.
Ranney, T.A., Simmons, L.A., & Masalonis, A.J. (1999). Prolonged exposure to glare
and driving time: effects on performance in a driving simulator. Accident analysis
and prevention, 31, 601-610.
Rasmussen, J. (1983). Skills, rules, and knowledge; signals, signs, and symbols, and other
distinctions in human performance models. IEEE Transactions on Systems, Man,
and Cybernetics, SMC-13, 257-266.
Rasmussen, J. (1987). The definition of human error and a taxonomy for technical system
design. In: J. Rasmussen, K. Duncan and J. Leplat (Eds), New technology and
human error. Chichester: Wiley.
Meting van njgedrag op de gerenoveerde Zeelandbrug 44
Riemersma, J.B.J. (1982). Perception and control of deviations from a straight course.
Soesterberg: Instituut voor zintuigfysiologie TNO. Rapport IZF 1979 C-6.
Riemersma, J.B.J. (1987). Visual cues in straight road driving. Soest: drukkerij Neo
Print.
Riemersma, J.B.J. (1989). Waamemen van weg en omgeving en rijgedrag. In: C.W.F.
van Knippenberg, J.A. Rothengatter & J.A. Michon, Handboek sociale
verkeerskunde. Assen: van Gorcum.
Semb, G. (1969). Scaling automobile speed. Perception & psychophysics, 5(2), 97-10 1.
Smiley, A. (1989). Cognitieve vaardigheden van autobestuurders. In: C.W.F. van
Knippenberg, J.A. Rothengatter & J.A. Michon, Handboek sociale verkeerskunde.
Assen: van Gorcum.
Stammers, R.B., Carey, M.S., & Astley, J.A. (1990). Task analysis. In: J.R. Wilson &
E.N. Corlett, Evaluation of human work: a practical ergonomics methodology.
Philadelphia: Taylor & Francis.
Steyvers, F.J.J.M. (1994). Effecten van wegbelzjning op rijgedrag en verkeersveiligheid—
een literatuuroverzicht. Haren: Verkeerskundig Studiecentrum, Rijksuniversiteit
Groningen. Rapport WR 94-05.
Steyvers, F.J.J.M. (1999). Preferentie- en belevingsonderzoek naar wegdek- en
barrierkleuren op de Zeelandbrug. Groningen: COy, faculteit PPSW,
Rijksuniversiteit Groningen. Rapport COV 99-04.
Steyvers, F.J.J.M., & de Waard, D. (2000). Road-edge delineation in rural areas: effects
on driving behaviour. Ergonomics, 43(1), 223-238.
Meting van njgedrag op de gerenoveerde Zeelandbrug 45
Steyvers, F.J.J.M., & van Wolffelaar, P.C. (1998). Naar een nieuwe rijstrookindeling op
de Zeelandbrug: wetenschappelijk versiag. Groningen: COV, faculteit PPSW,
Rijksuniversiteit Groningen. Rapport COV 98-06.
Summala, H., Leino, M., & Vierimaa, J. (1981). Drivers' steering behavior when meeting
another car: the case of perceptual tropism revisited. Human factors, 23(2), 185-
189.
Summala, H. (1996). Accident risk and driver behaviour. Safety science, 22(1-3), 103-
117.
Summala, H. (1998). Forced peripheral vision driving paradigm: evidence for the
hypothesis that car drivers learn to keep in lane with peripheral vision. In: A.G.
Gale (Ed), Vision in vehicles VI. Amsterdam: Elsevier, North Holland.
Tenkink, E. (1988). Lane keeping and speed choice with restricted sight distances. In:
J.A. Rothengatter & R.A. de Bruin (Eds), Road user behaviour: theory and
research. Assen: van Gorcum.
Triggs, T.J. (1980). The influence of oncoming vehicles on automobile lateral position.
Human factors, 22, 427-433.
Tnggs, T.J. (1997). The effect of approaching vehicles on the lateral position of cars
travelling on a two-lane rural road. Australian psychologist, 32(3), 1-5.
Van der Huist, M. (1999). Adaptive control of safety margins in driving. Proefschrift,
Rijksuniversiteit Groningen.
Meting van rijgedrag op de gerenoveerde Zeelandbrug 46
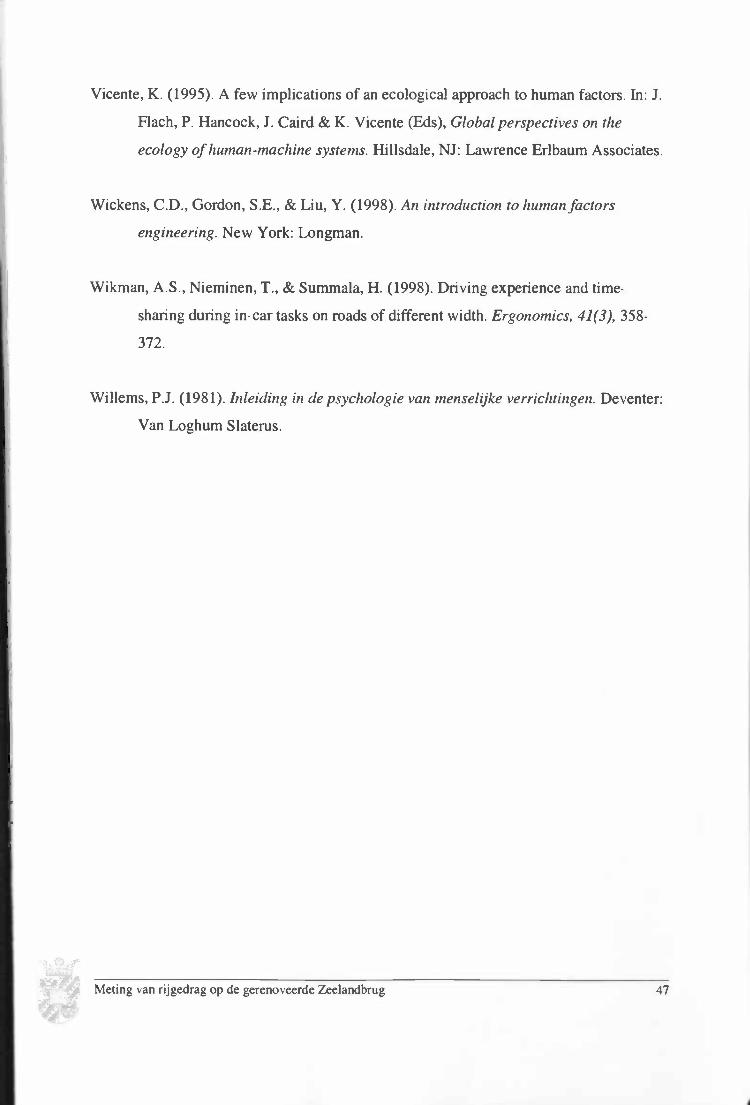
Vicente, K. (1995). A few implications of an ecological approach to human factors. In: J.
Each, P. Hancock, J. Caird & K. Vicente (Eds), Global perspectives on the
ecology of human-machine systems. Hilisdale, NJ: Lawrence Eribaum Associates.
Wickens, C.D., Gordon, S.E., & Liu, Y. (1998). An introduction to human factors
engineering. New York: Longman.
Wikman, A.S., Nieminen, T., & Summala, H. (1998). Driving experience and time-
sharing during in-car tasks on roads of different width. Ergonomics, 41(3), 358-
372.
Willems, P.J. (1981). inleiding in de psychologie van menselijke verrichtingen. Deventer:
Van Loghum Slaterus.
Meting van njgedrag op de gerenoveerde Zeelandbrug 47

7. Bijlagen
Bijlage 1: cumulatieve grafieken
Bijiage 2: foto's van (montage van de videocamera op) de Zeelandbrug
Meting van rijgedrag op de gerenoveerde Zeelandbrug 48
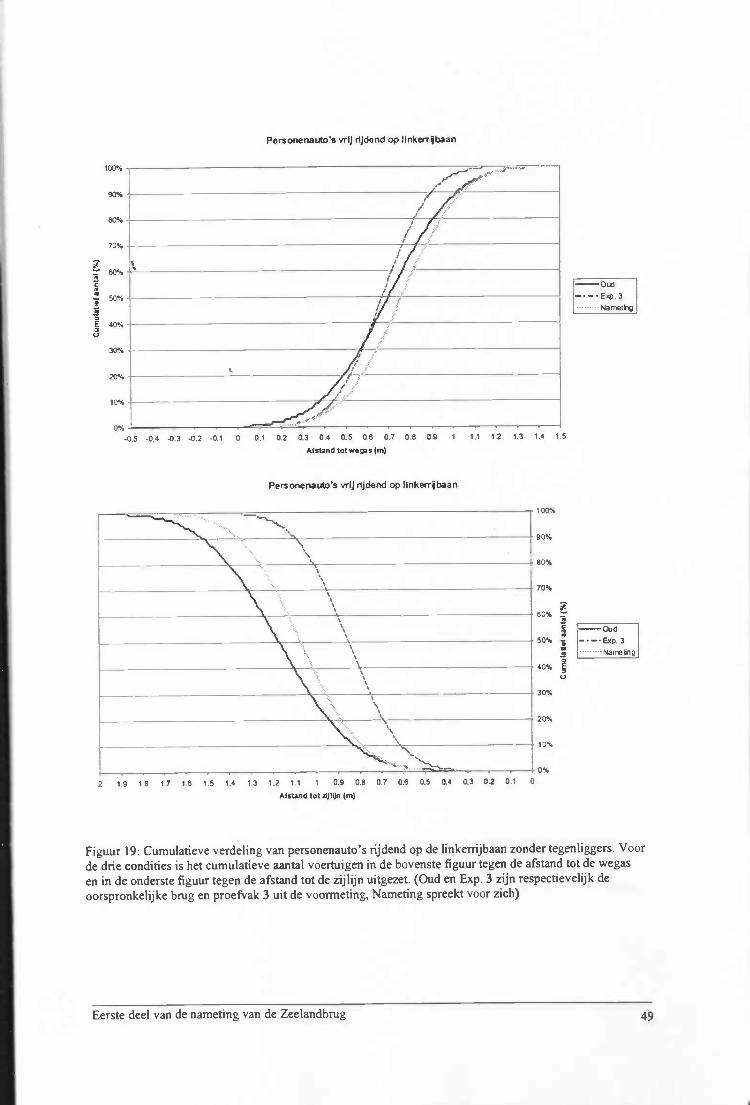
3
iU
100%- ..
____ __________
90%
_._____._\\ 80%
__ __ ______
70%
\.. 30%
20%
10%
0%
2 19 1.8 1.7 16 1.5 1.4 1.3 1.2 1.1 1 0.9 08 0.7 0.6 0.5 0.4 03 0.2 0.1 0
Afstand tot 4*1(m)
60%
______
—Oud50% -—Exp3
Nwa81g
Figuur 19: Cumulatieve verdeling van personenauto's rijdend op de Iinkerrijbaan zonder tegenliggers. Voorde drie condities is het cumulatieve aantal voertuigen in de bovenste figuur tegen de afstand tot de wegasen in de onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud en Exp. 3 zijn respectievelijk deoorspronkelijke brug en proefvak 3 uit de voormeting, Nameting spreekt voor zich)
Eerste deel van de nameting van de Zeelandbrug 49
Personenautos vrIj ilJd.nd op IInk.rrb.an
—Otd--Ei.3
N3mSUIQ
0%
-0.5 -0.4 .0.3 -0.2 -0.1 0 0.1 02 0.3 0.4 05 0.6 0.7 0.6 0.9 1 1.1 12 1.3 1.4 1.5
Afstand totws (in)
Personenautos wIJ rljdend op II,*.nIbaan
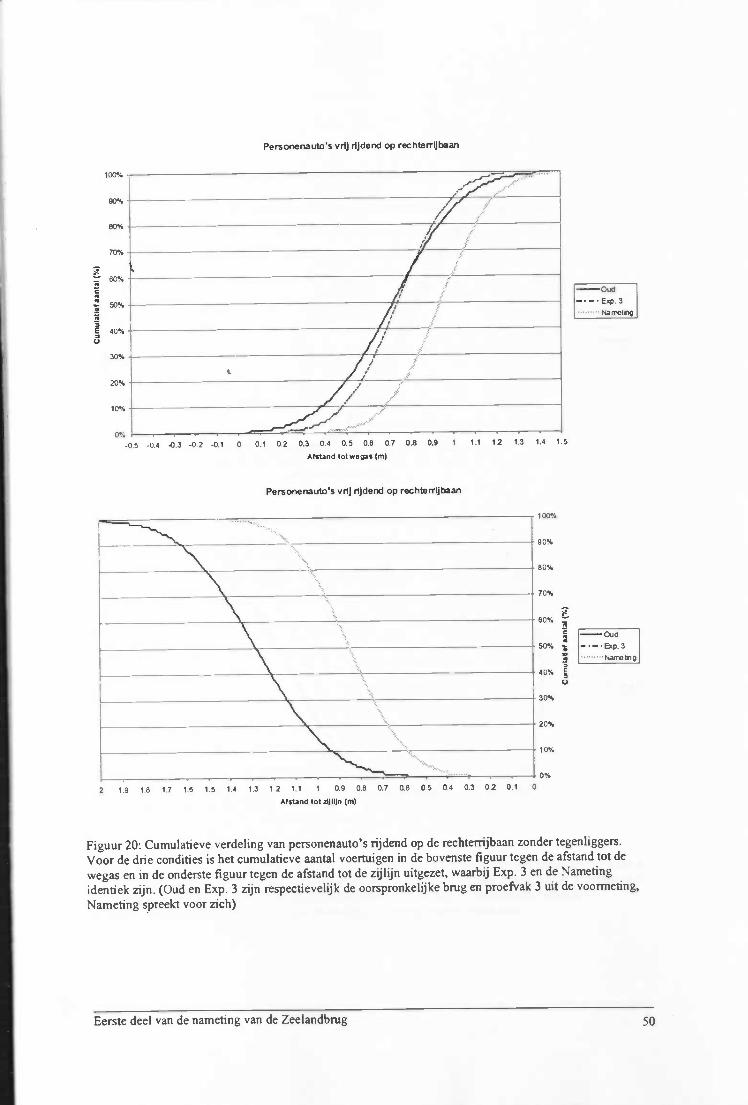
Personenautos vilj ilJd.nd op echenbsa
—out• Nsntng
3
___________
-—Exp.3• PQraIg
Figuur 20: Cumulatieve verdeling van personenauto's rijdend op de rechternjbaan zonder tegenliggers.Voor de drie condities is het cumulatieve aantal voertuigen in de bovenste figuur tegen de afstand tot dewegas en in de onderste figuur tegen de afstand tot de zijlijn uitgezet, waarbij Exp. 3 en de Nametingidentiek zijn. (Oud en Exp. 3 zijn respectievelijk de oorspronkelijke brug en proefvak 3 uit de vooimeting,
Nameting spreekt voor zich)
Eerste deel van de nameting van de Zeelandbrug 50
jSO%
.0.5 .0.4 -0.3 -0.2 .0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 12 1.3 14 1.5
Ailtand tot wsS (m)
P.rsonenauto's vdj ,ijd.nd op rschtsrrebsal
2 1.9 1.8 17 16 1.5 14 1.3 1.2 1.1 1 0.9 0.8 0.7 06 05 0.4 03 0.2 0.1 0
AfttandtOt4n(m)
N
Iaaa
U
Personenauto's met tegenligger op IInk.rrijbaan
— ---——-.———— .—----—-—-— —— 60%
40%
30%
20%
0%
2 19 18 17 16 15 14 13 12 II 1 0.9 08 0.7 0.6 0.5 0.4 0.3 02 0 1 0
At stand tot zIjIIJn (m)
Figuur 21: Cumulatieve verdeling van personenauto's rijdend op de linkemjbaan met tegenliggers. Voor dedne condities is het cumulaneve aantal voertuigen in de bovenste figuur tegen de afstand tot de wegas en inde onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud en Exp. 3 zijn respectievelijk deoorspronkelijke brug en proefvak 3 uit de voormeting, Nameting spreekt voor zich)
Eerste deel van de nameting van de Zeelandbrug 51
40%
t30%
20%
fl%
-0.5 -04 -03 -02 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.6 0.9 I II 12 13 14 15
Atatand tot wig.. (m)
Personenauto's met tegenfigger op Ilnkerrijbaan
— -—. —Esip.3
Narirç
Cui— .— . -E,p.3
Navirg
N
IaaaIaU
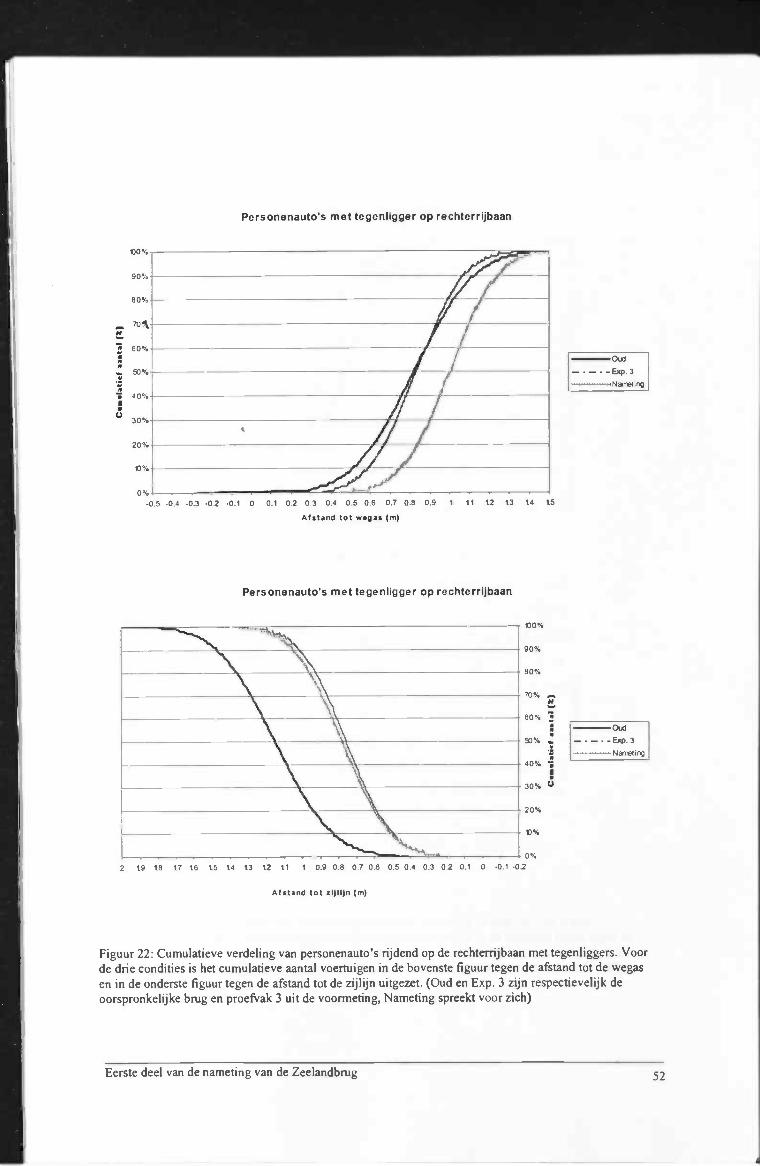
E0%
Personenautos met togenligger op rechterriJbaan
80%
70
60%
40%
30%t
20%
0%-0.5 -04 -03 -02 -0.1 0 0.1 02 0.3 0.4 0.5 0.8 0.7 0.8 0.9 1 II 12 13 14 1.5
At.tand tot wsgal (m)
Figuur 22: Cumulatieve verdeling van personenauto's rijdend op de rechterrijbaan met tegenliggers. Voorde drie condities is het cumulatieve aantal voertuigen in de bovenste figuur tegen de afstand tot de wegasen in de onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud cii Exp. 3 zijn respectievelijk deoorspronkelijke brug en proefvak 3 uit de voormeting, Nameting spreekt voor zich)
Eerste dccl van de nameting van de Zeelandbrug 52
N
aaaa
a
aaIp
U
Otd— - — - —E,q.3
Naiir
Personenauto's met tegenhigger op rechterrijbaan
N
Iaa
a
apIpU
— . —. .Exp.3
2 1918 1706 1.51403 1.2 II 1 0.90.8 0.70.6 0.50.4 0.3 02 0.1 0-0.1-02
Atstand tot zIJIIjn (m)
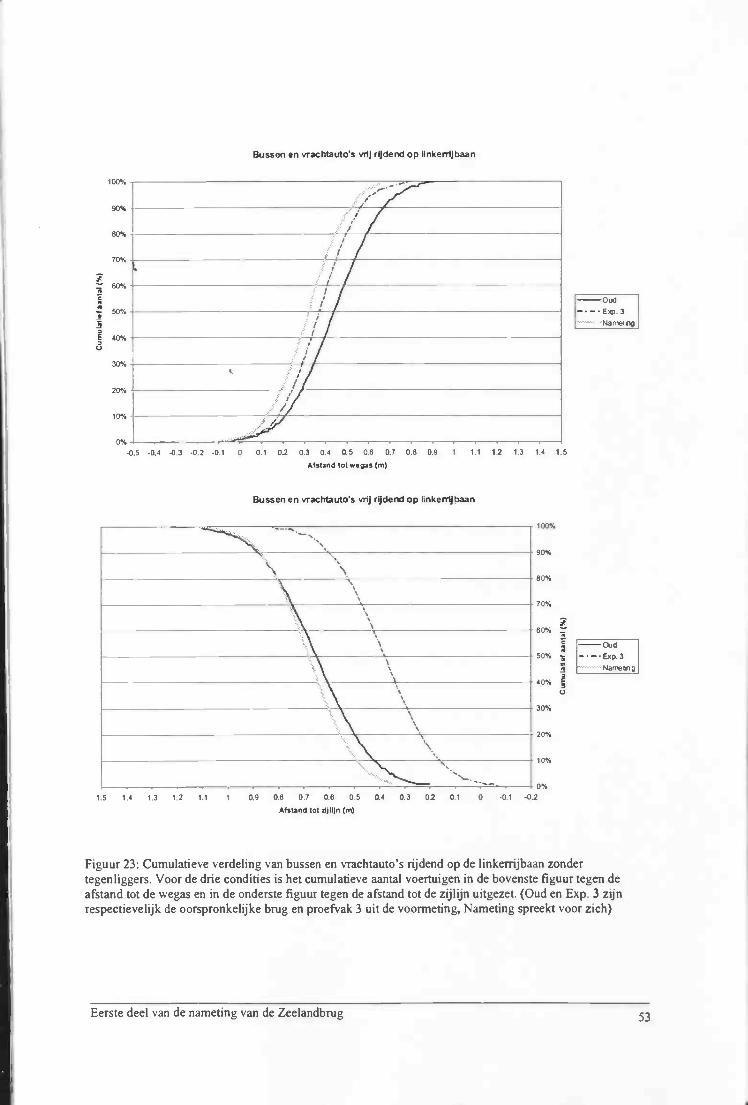
Buss.n sn wacMautos n1J rMdend op Ink.rrljbaan
Buuen en wachtautos vilj rdend op Inkeffljbaan
—Oud——E3
100%
90%
80%
70%
60%j
____
OUd50% I--"ExP.3
L PTthg401
30%
20%
10%
0%
1.5 1 4 1.3 1.2 1.1 1 09 0.8 0.7 0.8 0.5 0.4 03 0.2 0.1 0 .0.1 -0.2
At dtotn(m)
Figuur 23: Cumulatieve verdeling van bussen en vrachtauto's njdend op de linkerrijbaan zondertegenliggers. Voor de drie condities is het cumulatieve aantal voertuigen in de bovenste figuur tegen deafstand tot de wegas en in de onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud en Exp. 3 zijnrespectievelijk de oorspronkelijke brug en proefvak 3 uit de voormeting, Nameting spreekt voor zich)
Eerste dccl van de nameting van de Zeelandbrug 53
S
a
-0.5 -0.4 .0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 05 0.6 07 0.6 0.9 1 1.1 12 1.3 14 1.5
ASutand tOwS$ (m)
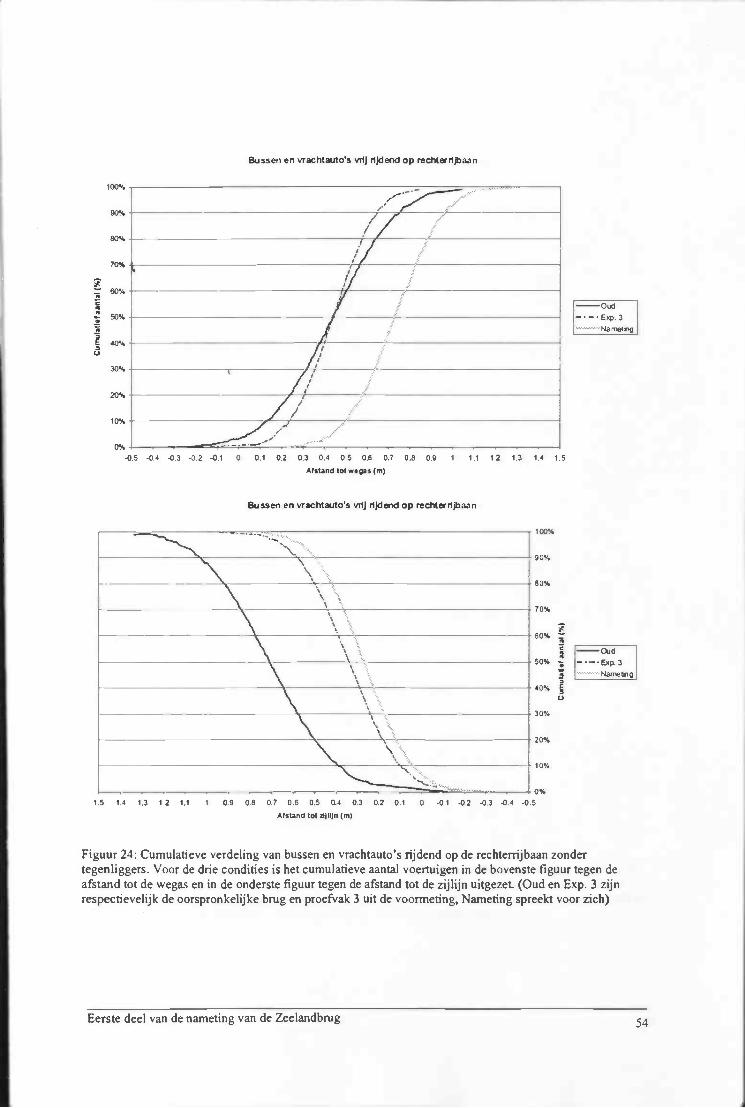
Bussen en vrachtautos vvlJ rildend op reChterrlj,aan
—o'--Eiq3
Namstig
at
50% Exp.3IT5819
Figuur 24: Cumulatieve verdeling van bussen en vrachtauto's rijdend op de rechterrijbaan zondertegenliggers. Voor de drie condities is het cumulatieve aantal voeTtuigen in de bovenste figuur tegen deafstand tot de wegas en in de onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud en Exp. 3 zijnrespectievelijk de oorspronkelijke brug en proefvak 3 uit de voormeting, Narueting spreekt voor zich)
Eerste dccl van de nameting van de Zeelandbrug 54
70%
20%
10%
0%
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 05 0.8 07 0.8 0.9 1 1.1 1.2 1.3 14 1.5
Mitand tot wsps (m)
&issen en wachtajtos vdj ,ljdend op recM&rIun
0%15 1.4 1.3 12 1.1 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 .0.4 -0.5
Afstandtot4n(m)
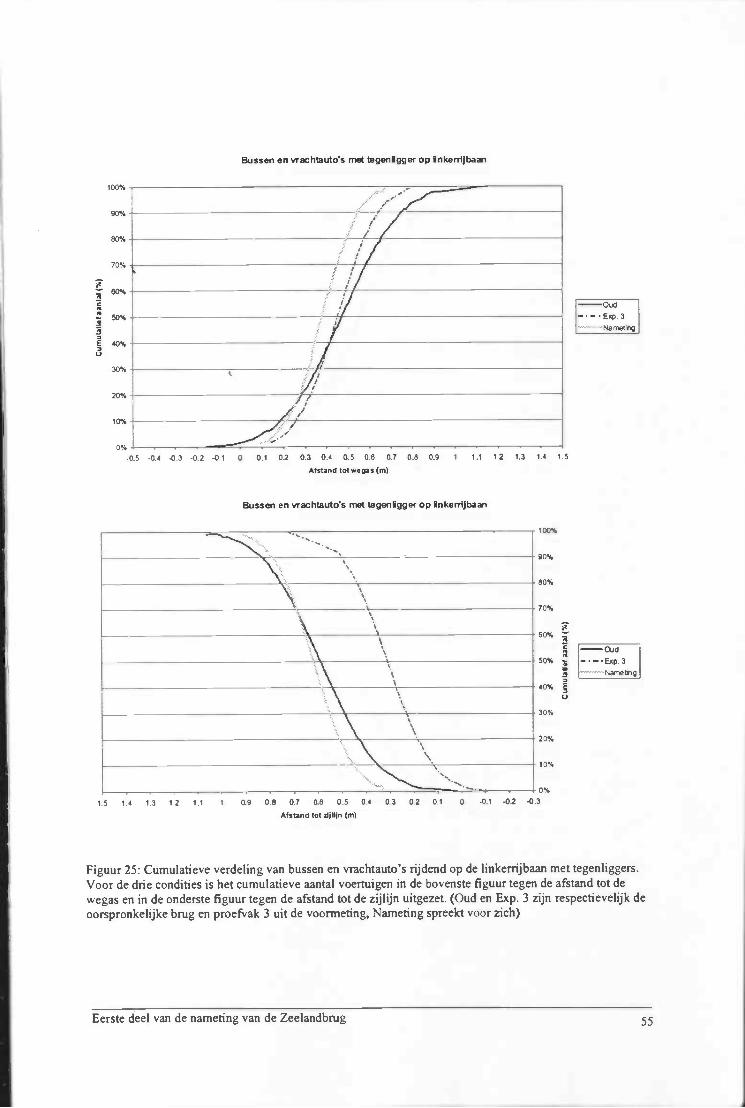
Figuur 25: Cumulatieve verdeling van bussen en vrachtauto's rijdend op de linkemjbaan met tegentiggers.Voor de drie condities is het cumulatieve aantal voertuigen in de bovenste flguur tegen de afstand tot dewegas en in de onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud en Exp. 3 zijn respectievelijk deoorspronkelijke brug en proefvalc 3 uit de voormeting, Nameting spreekt voor zich)
Eerste deel van de nameting van de Zeelandbrug 55
Bussen en vrachtautos met tegeniggec op nken1Jbaai
3
i
-0.5 -0.4 0.3 -0.2 -0.1 0 0.1 02 0.3 0.4 05 06 0.7 08 0.9 I Ii 12
AMend tot wes (m)
Bussen en wachtauto's met t.genlggsr op Ink.fflJbaa
1.3 1.4 1.5
—-—•E4.3mmg
3
__________
--—-Exp3
1.5 1.4 1.3 1.2 1.1 1 0.9 08 0.7 0.6 0.5 0.4 03 0.2 01 0 -0.1 -02 -0.3
Afsbndtotn(m)
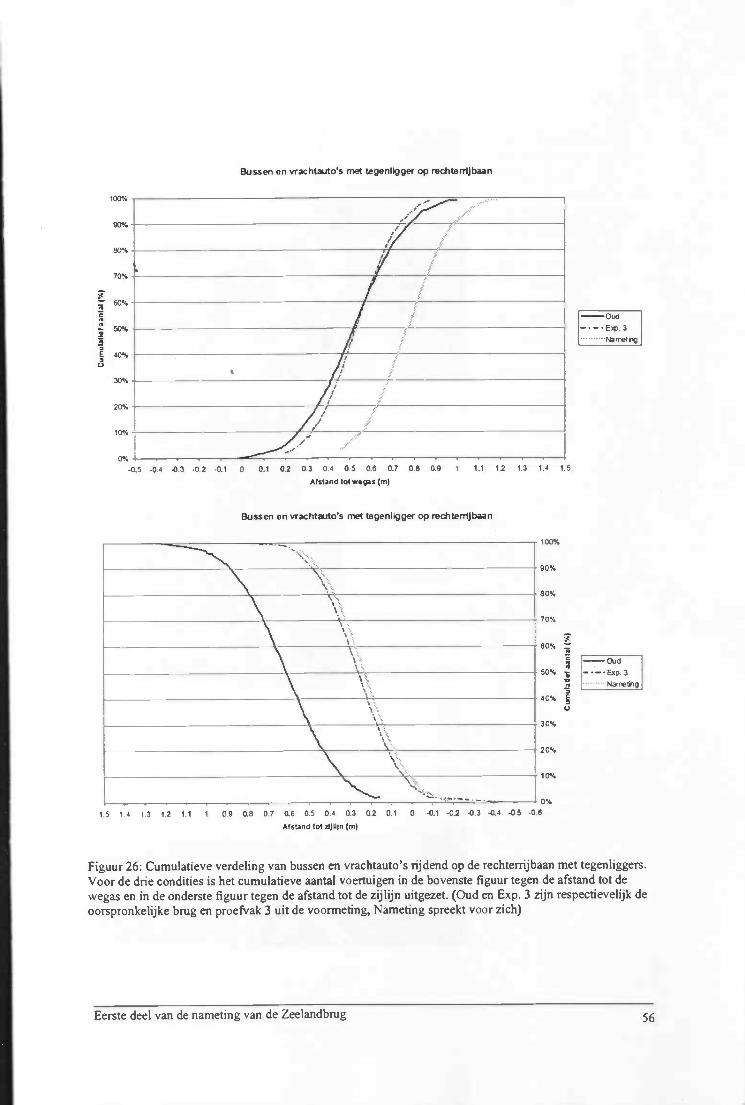
3NI3
1Al7.
90%
\,.80%
70%
—_________________ ._______________ 60%50%
\..40%
\ \...30%
\ 20%\\ \'.. 10%
Sc—- —r 0%
1.5 1.4 1.3 1.2 1.1 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 01 0 -0.1 -02 -0.3 -0.4 -0.5 -0.6
AfstandtotUn(m)
13
Figuur 26: Cumulatieve verdeling van bussen en vrachtauto's njdend op de rechterrijbaan met tegenliggers.Voor de drie condities is het cumulatieve aantal voertuigen in de bovenste figuur tegen de afstand tot dewegas en in de onderste figuur tegen de afstand tot de zijlijn uitgezet. (Oud en Exp. 3 zijn respectievelijk deoorspronkelijke brug en proefvak 3 uit de voormeting, Nameting spreekt voor zich)
Eerste dccl van de nameting van de Zeelandbrug 56
Buuen en vrachtautos met tegenhigger op rechterrhjbaan
—Oud
-05 -0.4 0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 05 06 0.7 0.8 0.9 1 1.1 12 1.3 1.4 1.5
Ailtand tot wss (m)
Bussen en vrachtaitos met eg.nhIgger op ,.dtenhjbssn

Dhr. Veeman is bezigmet de montage van decamera op deconstructie van deZeelandbrug. De fotois naar het zuidengenomen, waarbij tezien is dat de cameranaar het noordengericht is. In deopenstaande ijzerenbak zaten devideorecorder en eenmonitor.
De verrijdbare constructieten behoeve van hetonderhoud van deZeelandbrug staand op defietsstrook.
Zicht op defietsstrook (links) ende rijbaan (rechts)van de Zeelandbrug.Dit is ongeveerhetzelfde beeld alsbij de video-opnamen zijngebruikt.
Eerste deel van de nameting van de Zeelandbrug 57