a user manual for jmarkov package
TRANSCRIPT

A User Manual for jMarkov Package
Trabajo de Tesispresentado al
Departamento de Ingeniería Industrial
por
Marco Sergio Cote Vicini
Asesor: Raha Akhavan-TabatabaeGerman Riaño
Para optar al título deIngeniero Industrial
Ingeniería IndustrialUniversidad de Los Andes
Junio 2011

To my father and my mother for their constant support, to my sister
for her unconditional love.
ii

Acknowledge
I want to acknowledge the work done by German Riaño, Juan Fernando Perez,
Andres Sarmiento and Julio Goez who are the developers of the jMarkov software
and were always there to support me and answerer my in�nite questions.
Also I want to acknowledge all the support and guidance given by German, Raha
and Andres through this last year. Without their help and advice this document
have never been done.
iii
Table of Contents
Dedicatoria ii
Acknowledge iii
List of Figures vi
Abstract vii
I Introduction 1
II Background 4
2.1 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Markov Chains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Quasi Birth and Death Process (QBD) . . . . . . . . . . . . . . . . 7
2.4 Phase Type Distributions (PH Distributions) . . . . . . . . . . . . . 9
2.4.1 Fitting Algorithms . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Markov Decision Process (MDP) . . . . . . . . . . . . . . . . . . . . 12
2.5.1 Finite Horizon Problems . . . . . . . . . . . . . . . . . . . . 13
2.5.2 In�nite Horizon Problems . . . . . . . . . . . . . . . . . . . . 14
2.5.3 Continuous Time Markov Decision Processes . . . . . . . . . 15
2.5.4 Event Modeling . . . . . . . . . . . . . . . . . . . . . . . . . 15
III Work Process 18
IV User Manual 22
4.1 Programming Knowledge . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 Structure Description . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2.1 jMarkov.basic . . . . . . . . . . . . . . . . . . . . . . . . . . 23
iv
4.2.2 jMarkov and jQBD . . . . . . . . . . . . . . . . . . . . . . . 25
4.2.3 jPhase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.4 jMDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 Modeling Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3.1 jMarkov.basic . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3.2 jMarkov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.3 jQBD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3.4 jPhase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3.5 jMDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
V Applications in Real Life Problems 64
VI Conclusions 66
v

List of Figures
1 Taxonomy for MDP problems . . . . . . . . . . . . . . . . . . . . . . 12
2 User's Manual Architecture . . . . . . . . . . . . . . . . . . . . . . . 20
3 The main classes of the basic package . . . . . . . . . . . . . . . . . . 24
4 The main classes of the jMarkov modeling package . . . . . . . . . . 25
5 BuildRS algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6 The User Interface of jMarkov and jQBD . . . . . . . . . . . . . . . . 27
7 The Toolbar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
8 The Interface Views . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
9 The jPhase Main Classes . . . . . . . . . . . . . . . . . . . . . . . . . 29
10 The jPhase Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
11 Createing a New PH Distribution . . . . . . . . . . . . . . . . . . . . 32
12 Choosing a Fitting Process . . . . . . . . . . . . . . . . . . . . . . . . 32
13 The jMDP Main Classes . . . . . . . . . . . . . . . . . . . . . . . . . 33
vi

Abstract
This document presents the user manual of the jMarkov software, an object-
oriented modeling software designed for the analysis of stochastic systems in steady
state. It allows the user to create Markov models of arbitrary size with its component
jMarkov. It also provides the tools to model quasi-birth-death process. processes
with its jQBD component.
Further development of the software has created two new modules. jPhase allows
representation of phase-type distributions that are useful when representing real-life
systems, and jMDP is a module for modeling and solving Markov decision processes
and dynamic programming problems.
vii
Chapter I
Introduction
When analyzing real-life stochastic systems, using analytical models is often eas-
ier, cheaper and more e�ective than studying the physical system or a simulation
model of it. The stochastic modeling is a powerful tool that helps the analysis and
optimization of stochastic systems.
However, the use of stochastic modeling is not widespread in today's industries
and among practitioners. This lack of acceptance has two main causes. The �rst is
the curse of dimensionality, which is de�ned by the number of states required to de-
scribe a system. This number grows exponentially as the size of the system increases.
The second is the lack of user-friendly and e�cient software packages that allow the
modeling of the problem without involving the user with the implementation of the
solution algorithms necessary to solve it.
The curse of dimensionality is a constant problem that has been addressed by
di�erent approaches over time, but it is outside the scope of this document. The
focus of this it is the latter issue, the lack of user-friendly and e�cient software
packages. We propose a generic solver that enables the user to focus on modeling
without becoming involved in the complexity required by the solution methods.
1

jMarkov is an object-oriented framework for stochastic modeling with four com-
ponents: jMarkov, which models Markov chains; jQBD, which models quasi-birth-
death processes; jPhase, which models phase-types distributions; and jMDP, which
models Markov decision processes (MDPs). The main contribution of this frame-
work is the separation of modeling steps from the solution algorithms. The user can
concentrate on modeling the problems and choose from a set of solvers at his or her
convenience. The structure of the software package allows third-party developers to
plug in their own solvers.
The modeling software does not use external plain �les, like ".txt" or ".dat" �les,
written with speci�c commands; rather, it is based on object-oriented programming
(OOP) [1], which enables the encapsulation of entities in classes and exposes its
functionality independently of its internal implementation. This has many bene�ts,
including, �rst, the analogy between the mathematical elements and their compu-
tational representation; second, the exploration algorithm, which �nds all the states
in the chain, avoiding possible mistakes the user can make by manual de�nition in
very large systems; and, third, that the software is based in Java, so the user need
not deal with technical processes like memory allocations.
Although jMarkov was developed a few years ago, stochastic modeling is not
widespread. Most people still prefer other system-analyzing tools like simulations.
jMarkov has not �xed the initial problem of creating an user-friendly software for
motivating the use of stochastic modeling. The main reason for this is the lack of
a simple and easy reading manual. The existing documentation has an academic
and computer-science approach, confusing to people new to stochastic modeling and
lacking extensive programming knowledge. Its examples require signi�cant software
understanding, making jMarkov look like a complex tool, when it is actually quite
2

easy to work with. The existing user manual is presented in this document.
The present document is organized as follows. Section 2 provides a brief mathe-
matical background needed to understand the other sections, as well as descriptions
of the notations used. Readers who feel comfortable with the topic can skip this
section without any break in continuity. Section 3 describes the work done to create
the new manual. Section 4 is the user manual. It explains the main computational
elements that the user needs to know to build a model and describes the handling of
di�erent problems with an example. Section 5 presents references to real industry
problems that have been and are being solved using the software. Section 6 presents
general conclusions.
3
Chapter II
Background
In this section we give a short explanation of the main mathematical topics the
reader has to be familiar with to facilitate understanding of the software. We do
not intend to explain the topics, just to present a quick review. We also provide
references for readers who want to read more about these topics. And we present
the literature review done for look onder software packages similar to jMarkov.
It is important to mention that to ful�ll the main purpose of the document-to
create an e�ective user manual for jMarkov-this chapter has been taken from the
thesis done by jMarkov developers. We want to acknowledge credit for the following
pages to German Riaño [30], Juan Fernando Perez [47], Andres Sarmiento [48] and
Julio Goez [45].
2.1 Literature Review
Several packages for solving stochastic processes, such as MAMSolver [2], MGMTool
[3], SMAQ [4], Qnap2 [5], and XMarca [6], can be found but them have a focus on the
solution algorithm rather than ours, which has a modeling purpose. They are tools
that implement analytical algorithms to solve queuing problems. Additionally, there
can be found the SIMULA language [7], which is the �rst modeling tool based on
4
OOP. Others, such as MARCA [8], SMART [9], PROBMELA [10] and Generalized
Markovian Analysis of Timed Transitions Systems [11], allow building and analyzing
Markov chains, but they are not based on OOP, so the modeling becomes harder
for beginners to the subject.
The program most similar to jMarkov is probably SHARPE [24], which mod-
els di�erent types of systems including combinatorial ones, such as fault trees and
queuing networks, and state-space ones, such as Markov and semi-Markov reward
models, as well as stochastic Petri nets. It also computes steady-state, transient and
interval measures. The main di�erence between these software packages and ours is
that jMarkov has a component for Markov decision processes (MDPs) that allows
not only analysis, but also optimization, of the systems under study.
From another perspective, some stochastic linear programming languages have
been developed, such as Xpress-SP [12], extensions for AMPL [13] and SAMPL/SPInE
[14]. These are not fully comparable to the framework presented in this document,
because they have some speci�c limitations and are not very open to reach to any
type of stochastic modeling.
The literature review speci�c on MDP modeling software includes a program
able to solve them, winQSB [15], into which the user needs to input the transition
matrices for each action. Other works include MDPLab [16], an educational tool
developed by Lamond to test di�erent algorithms, a toolbox for Matlab to handle
MDPs [17] and a variety of software made in academia, such as Pascal Poupart
from University of Waterloo [18], Trey Smith's with his software called ZMDP [19],
Anthony R. Cassandra from Brown University [20], Matthijs Spaan from Universiteit
van Amsterdam with his software called perseus [21], Tarek Taha with a set of tools
for solving POMDP (partially observable MDP) [22] and an open source project
5
called Caylus [23]. However, all of these software packages are primarily focused
on the solutions algorithm, and all of them use plain �les as inputs for building
the Markov chain. Our proposed software package centers the e�ort on facilitating
the modeling aspect of the problem providing a pre-coded solution algorithms while
also leaving open the possibility of coding new solvers, such as the ones mentioned
above.
2.2 Markov Chains
Suppose we observe some characteristic of a system. Let X(t) be the value of the
system characteristic at time t, this value is not known with certainty before time
t so it can be viewed as a random variable. This characteristic that describes the
system in a speci�c time is called state. A state changes its value, when an event
occurs. The probability of passing from one state to another is called the transition
probability. A stochastic process is simply a description of the relation between the
random variables [25].
A Discrete Time Markov Chain (DTMC) is a special type of stochastic process
that meets the Markovian property. The property de�nes a process where the condi-
tional distribution of any future stateX(t+1), given the past statesX(0), ..., X(t−1)
and the present state X(t) , is independent of the past states and depends only on
the present state [25].
From now on we limit our description to Continuous Time Markov Chain (CTMC),
although jMarkov can also handle Discrete Time Markov Chains (DTMC) as well.
Let {X(t), t ≥ 0} be a CTMC, with �nite State Space S and generator matrix
Q, with components
qij = limt↓0
P {X(t) = j|X(0) = i} i, j ∈ S.
6

It is well known that this generator matrix, along with the initial conditions, com-
pletely determines the transient and stationary behavior of the Markov Chain [26].
The diagonal components qii are non-positive and represent the exponential hold-
ing rate for state i, whereas the o� diagonal elements qij represent the transition
rate from state i to state j.
The transient behavior of the system is described by the matrix P(t) with com-
ponents
pij(t) = P {X(t+ s) = j|X(s) = i} i, j ∈ S.
This matrix can be computed as
P(t) = eQt t > 0.
For an irreducible chain, the stationary distribution π = [π1, π2, . . . , ] is determined
as the solution to the following system of equations
πQ = 0
π1 = 1,
where 1 is a column vector of ones.
2.3 Quasi Birth and Death Process (QBD)
Consider a Markov process {X(t) : t ≥ 0} with a two dimensional state space
S = {(n, i) : n ≥ 0, 1 ≤ i ≤ m}. The �rst coordinate n is called the level of the
process and the second coordinate i is called the phase. We assume that the number
of phases m is �nite. In applications, the level usually represents the number of
items in the system, whereas the phase might represent di�erent stages of a service
process.
7

We will assume that, in one step transition, this process can go only to the states
in the same level or to adjacent levels. This characteristic is analogous to a Birth and
Death Process, where the only allowed transitions are to the two adjacent states [26].
Transitions can be from state (n, i) to state (n′, i′) only if n′ = n, n′ = n − 1 or
n′ = n+1, and, for n ≥ 1 the transition rate is independent of the level n. Therefore,
the generator matrix, Q, has the following structure
Q =
B00 B01
B10 A1 A0
A2 A1 A0
. . . . . . . . .
,
where, as usual, the rows add up to 0. Note that Aij and Bij presents sub matri-
ces, don't confused them to simple elements. An in�nite Markov Process with the
conditions described above is called a Quasi-Birth and Death Process (QBD).
In general, the level zero might have a number of phases m0 6= m. We will call
these �rst m0 states the boundary states, and all other states will be called typical
states. Note that matrix B00 has size (m0×m0), whereas B01 and B10 are matrices
of sizes (m0 ×m) and (m×m0), respectively. Also note that Aij has size (m×m)
Assume that the QBD is an ergodic Markov Chain. As a result, there is a steady
state distribution π that is the unique solution π to the system of equations πQ = 0,
π1 = 1. Divide this π vector by levels, analogously to the way Q was divided, as
π = [π0,π1, . . .].
Then, it can be shown that a solution exists that satis�es
πn+1 = πnR, n > 0,
8

where R is a constant square matrix of order m [28]. This R is the solution to the
matrix quadratic equation
A0 +RA1 +R2A2 = 0.
There are various algorithms that can be used to compute the matrix R. For
example, one can start with any initial guess R0 and obtain a series of Rk through
iterations of the form
Rk+1 = −(A0 +R2kA2)A
−11 .
This process is shown to converge (and A1 does have an inverse). More elaborated
algorithms are presented in Latouche and Ramaswami [27]. Once R has been de-
termined then π0 and π1 are determined by solving the following linear system of
equations. [π0 π1
]B00 B01
B10 A1 +RA2
=
[0 0
]
π01+ π1(I−R)−11 = 1.
2.4 Phase Type Distributions (PH Distributions)
In this subsection, we review the de�nition and some properties of PH distributions.
We follow the treatment presented in [29] and [27], and therefore, the proofs in this
section are not included since the interested reader can �nd them in those books.
A continuous PH distribution is de�ned as the time until absorption in a CTMC,
with one absorbing state and all others transient. The generator matrix of such
process with m+ 1 states can be written as
Q =
0 0
a A
,
9

where A is a square matrix of size m, a is a column vector of size m and 0 is a row
vector of zeros. Here, the the �rst entry in the state space represents the absorbing
state. As the sum of the elements on each row must be equal to zero, a is determined
by
a = −A1,
where 1 is a column vector of ones. In order to completely determine the process,
the initial probability distribution is de�ned, and can be partitioned, in an similar
way to the generator matrix, as [α0 α
],
where α0 is the probability that the process starts in the absorbing state 0. Since
the sum of all the components in the initials conditions vector must be equal to 1,
α0 is determined by
α0 = 1−α1.
The distribution of a continuous PH variable X is, therefore, completely determined
by the parameters α and A given above. X has a representation (α,A). The
cumulative distribution function (CDF) of X is shown to be
F (t) = 1−αeAt1, t ≥ 0.
Notice that this has a clear similarity to the well-known exponential distribution.
In fact, if there is just one transient phase with associated rate λ and it is selected
at time 0 with probability one, then the distribution is the exponential. From the
previous expression, the probability density function (PDF) of the continuous part
can be computed as
f(t) = αeAta, t > 0.
10

The Laplace-Stieltjes transform of F (·) is given by
E[e−sX ] = α0 +α(sI−A)−1a, Re(s) ≥ 0,
from which, the non-centered moments can be calculated as
E[Xk] = k!α(−A−1)k1, k ≥ 1.
A Discrete PH distribution can be seen as a discrete analogous case to the contin-
uous PH distribution. In this case, the distribution is de�ned as the number of steps
until absorption in a Discrete Time Markov Chain (DTMC), with one absorbing
state and all others transient. The properties for this case can be found in [27].
As stated above, a relevant property of PH distributions is that they are closed
under various operations, such as convolution, order statistics, convex mixtures,
among others. For example, the mixture of two independent PH variables with
representations (α,A) and (β,B) which are chosen with probabilities p and (1−p),
respectively, has a PH representation (γ,C), where
γ = [pα, (1− p)β] and C =
A 0
0 B
Note that this is analogous to the construction of a hyper-exponential distribu-
tion.
These closure properties can be exploited in modeling some systems, as done, for
example, in [30]. Continuous PH distributions have some extra closure properties
such as the distribution of the waiting time in a M/PH/1 queue, the residual time,
the equilibrium residual time, and the termination time of a PH process with PH
failures [31].
11
2.4.1 Fitting Algorithms
In the last twenty years, the problem of �tting the parameters of a PH distribution
has received great attention from the applied probability community. There are
di�erent approaches that, as noted in [32], can be classi�ed in two major groups:
maximum likelihood methods and moment matching techniques. Nevertheless, al-
most all the algorithms designed for this task have an important characteristic in
common: they reduce the set of distributions to be �tted from the whole PH set to
a special subset.
The maximum likelihood algorithms we review were by Asmussen et. al. [33],
Khayari et. al. [34], and Thümmler et. al. [35], as well as the moment matching
algorithms by Telek and Heindl [36], Osogami and Harchol [37], and Bobbio et.
al. [38].
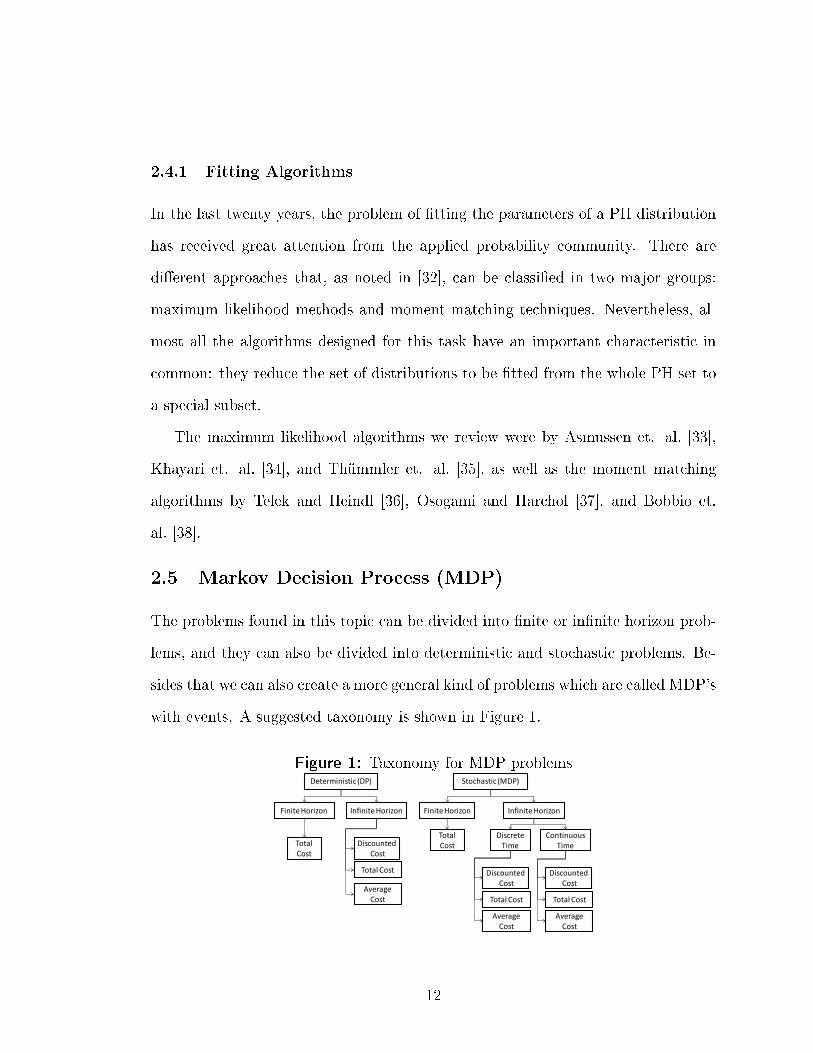
2.5 Markov Decision Process (MDP)
The problems found in this topic can be divided into �nite or in�nite horizon prob-
lems, and they can also be divided into deterministic and stochastic problems. Be-
sides that we can also create a more general kind of problems which are called MDP's
with events. A suggested taxonomy is shown in Figure 1.
Figure 1: Taxonomy for MDP problemsDeterministic (DP) Stochastic (MDP)
Infinite HorizonFinite Horizon Infinite HorizonFinite Horizon
TotalCost
TotalCost
DiscreteTime
Continuous Time
Average Cost
Total Cost
DiscountedCost
Average Cost
Total Cost
DiscountedCost
Average Cost
Total Cost
DiscountedCost
12

2.5.1 Finite Horizon Problems
We will show how a �nite horizon Markov decision process is built (for a com-
plete reference see Puterman [39] and Bertsekas [40]). Consider a discrete state
space, discrete time epochs or stages and a bivariate random process {(Xt, At), t =
0, 1, . . . , T − 1}. Each of the variable Xt ∈ St represents the state of the system at
stage t, and each At ∈ At is the action taken at that stage. The quantity T <∞ is
called the horizon of the problem.
The sets St and At represent the feasible states and actions at stage t, and
we assume that both are �nite. Let Ht be the history of the process up to time
t, i.e. Ht = (X0, A0, X1, A1, . . . , Xt−1, At−1, Xt). The dynamics of the system are
governed by a state in which an action is taken, leading the system to another
state according to a probability distribution. In general, the resulting state after
a transition from one state to another when the process is moved up to the next
stage depends on the history and the action taken in the previous stage. The
system satis�es the Markov property which implies P{Xt+1 = j|Ht = h,At = a} =
P{Xt+1 = j|Xt = i, At = a} = pijt(a). A decision rule is a function πt that, given a
history realization, assigns a probability distribution over the set A. A sequence of
decision rules π = (π0, π1, . . . , πT ) is called a policy . A policy π is called Markovian
if given Xt all previous history becomes irrelevant, that is
Pπ{At = a|Ht = h} = Pπ{At = a|Xt = i},
where Pπ denotes the transition probability distribution following policy π. A
Markovian policy π is called deterministic if there is a function ft(i) ∈ A such
13

that
Pπ{At = a|Xt = i} =
1 if a = f(i)
0 otherwise.
For each action a taken at state i and stage t, a �nite cost ct(i, a) is incurred.
Consequently it is possible to de�ne a total expected cost vπt (i) incurred from time
t to the �nal stage T following policy π; this is called the value function
vπt (i) = Eπ
[T∑s=t
cs(Xs, As)∣∣∣Xt = i
], i ∈ S0 (1)
where Eπ is the expectation operator following the probability distribution associ-
ated with policy π.
2.5.2 In�nite Horizon Problems
Consider a discrete space discrete time bivariate random process{(Xt, At), t ∈ N
}.
In particular we will assume that the the system is time homogeneous, this means
that at every stage the state space and action space remain constant and the tran-
sition probabilities are independent of the stage. i.e. pijt(a) = pij(a) = P{Xt+1 =
j|Xt = i, At = a} for all stages. Consequently, a policy π = (π0, π0, . . .) must also
be time homogeneous. Costs are also time homogeneous and ct(i, a) = c(i, a) stands
for the cost incurred when action a is taken in state i at any stage. Besides the total
cost objective function presented in the �nite horizon problem, it is customary to
de�ne two other objective functions namely, discounted cost and average cost. The
respective value functions under a policy π are
vπα(i) = Eπ
[∞∑t=0
αtc(Xt, At)∣∣∣X0 = i
], i ∈ S,
for the discounted cost where 0 < α < 1,
vπ(i) = Eπ
[∞∑t=0
c(Xt, At)∣∣∣X0 = i
], i ∈ S,
14

for the total cost, and
vπ(i) = limT→∞
1
TEπ
[T∑t=0
c(Xt, At)∣∣∣X0 = i
], i ∈ S,
for the average cost.
2.5.3 Continuous Time Markov Decision Processes
Consider an in�nite horizon problem with time-homogeneity, where the set{(X(t), A(t)
), t ≥
0}is the bivariate process that describes the state of the system and the action taken
at time t, on a continuous time space. The continuous time in�nite horizon problem
is denoted by CTMDP. Time-homogeneous transitions between states are described
by a transition rate λij(a) = limh→0 P{X(t + h) = j|X(t) = i, A(t) = a}. The
Markovian property implies that the time between transitions from one state to an-
other has an exponential distribution with parameter λi(a) equal to the sum of the
exit rates from the former state. This implies that a transition occurs only when
the state of the system X(t) changes and no self transitions are allowed. We de�ne
rate λ such that λ ≥ λ(i, a) for all states and actions. Costs can be lump costs
c̃(i, a) incurred in the instant when an action is taken and can also be continuously
incurred at rate γ(i, a) while remaining at state i.
2.5.4 Event Modeling
In this subsection we introduce the MDP's with events (for complete reference see
the work of Becker [41], Mahadevan [42], and Feinberg [43]) in order to show that the
process with events is equivalent to another process without events such as the ones
described earlier in this section. The mathematical model presented is an extension
of the mathematical models explained before in the sense that the same problems
can be represented in both. The diference lies that in the problems with event we
15

need to condition each transition to the event triggering it. The advantage of such a
presentation is that conditioning reduces the reachable set for each state and permits
an easier characterization of the system dynamics.
For the mathematical model with events, consider the discrete time random
process{(Xt, At, Et), t = 0, 1, . . . , T − 1
}, where Xt represents the state of the
system, At represents the action taken, and Et is the event that occurs at stage t (as
a consequence of the current state and the action taken) that triggers the transition
to Xt+1.We call the set of events that can occur at stage t, Et(i, a). The history of the
process up to stage t, is de�ned as Ht = (X0, A0, E0 . . . , Xt−1, At−1, Et−1, Xt). The
Markovian behavior of the system implies that P{Xt+1 = j|Ht = h,At = a,Et =
e} = P{Xt+1 = j|Xt = i, At = a,Et = e}. Consequently the dynamics can be
described by transition probabilities de�ned as pijt(a, e) = P{Xt+1 = j|Xt = i, At =
a,Et = e} that describe the conditional probability of reaching state j in the set of
reachable states St(i, a, e), given that the current state is i, action a is chosen and
given that event e occurs. The actions also present a Markovian property in the
sense that P{At = a|Ht = h} = P{At = a|Xt = i}. Finally, we assume that the
occurrence of events follows the Markov property. i.e.
P{Et = e|Ht = h,At = a} = P{Et = e|Xt = i, At = a},
e ∈ Et(i, a).
Let ct(i, a, e) be the cost incurred by taking action a at stage t from state i and
pt(e|i, a) = P{Et = e|Xt = i, At = a} be the conditional probability of occurrence
of event e at stage t.
16

In the �nite horizon problem, the value function is de�ned as
vπt (i) = Eπ
[T∑s=t
cs(Xs, As, Es)∣∣∣Xt = i
],
i ∈ S0, t = 0, 1, . . . , T − 1.
17

Chapter III
Work Process
As stated before, the jMarkov project lacks a user manual by which any person can
learn how to model with the program. When the software was coded, each of the
designers wrote a document for each component that tried to explain that modeling
process. But as user manuals, the documents have some problems.
They mostly focus on the package structure that is the software architecture.
In them, the user can �nd detailed explanations of all the classes' codes, as well
as the relationships between them. Although this is important for a designer, it
is unnecessary information for the user, who does not need to know the internal
processes of the software.
The documents also explain the modeling and solving algorithms used by the
software. We believe this is an excessively academic approach. It is very important
to understand which algorithms we are using in the software, but new users and
beginners to the subject will �nd this unnecessary information.
Finally, the examples provided in the documents are composed of just the coding.
They need to be explained so users can fully understand what they have to do to
work with jMarkov. The examples must be written for beginners, not knowledgeable
users.
18

The purpose of the software is to help stochastic modeling become widespread
and 'widespread' does not mean within computer science or academic communities,
but instead in industry. We need to make the manuals as simple as they can be, so
that people with a minimum knowledge of programming and the basic concepts in
stochastic modeling can use them to analyze small systems. We hope that this way,
in time, more and more people will become interested in the software and will use
it for more complex problems.
Thus we decided to create a user manual that will help users understand jMarkov
and realize how easy it is to work with. This manual gives the steps for modeling
with the software. It does not explain the internal working; it only provides the
information a user really needs to solve a problem. This explanation will consist of
a description of the classes the user will work with, as well as one example explaining
the steps for working with the tool. Through the document we will provide references
to other documents written for users who want to learn about jMarkov's internal
functions. We used the following process to write the manual:
1. Read the existing documents to see what had already been done toward the
goal writing a user manual. From those documents we adapted some informa-
tion as mathematical background.
2. Read the code and the existing examples to understand the internal working
of the software and to determine which parts were important to explain and
which were not.
3. Held meetings with the designers of the software to answer questions about
it. During those meetings we con�rmed the need for a user manual, since the
only way to completely understand the software was by talking to its authors.
19
4. Solved small problems in each component to determine the best way to explain
the process with jMarkov.
5. Translated the modeling steps into simple less technical words so that anyone
would to understand them.
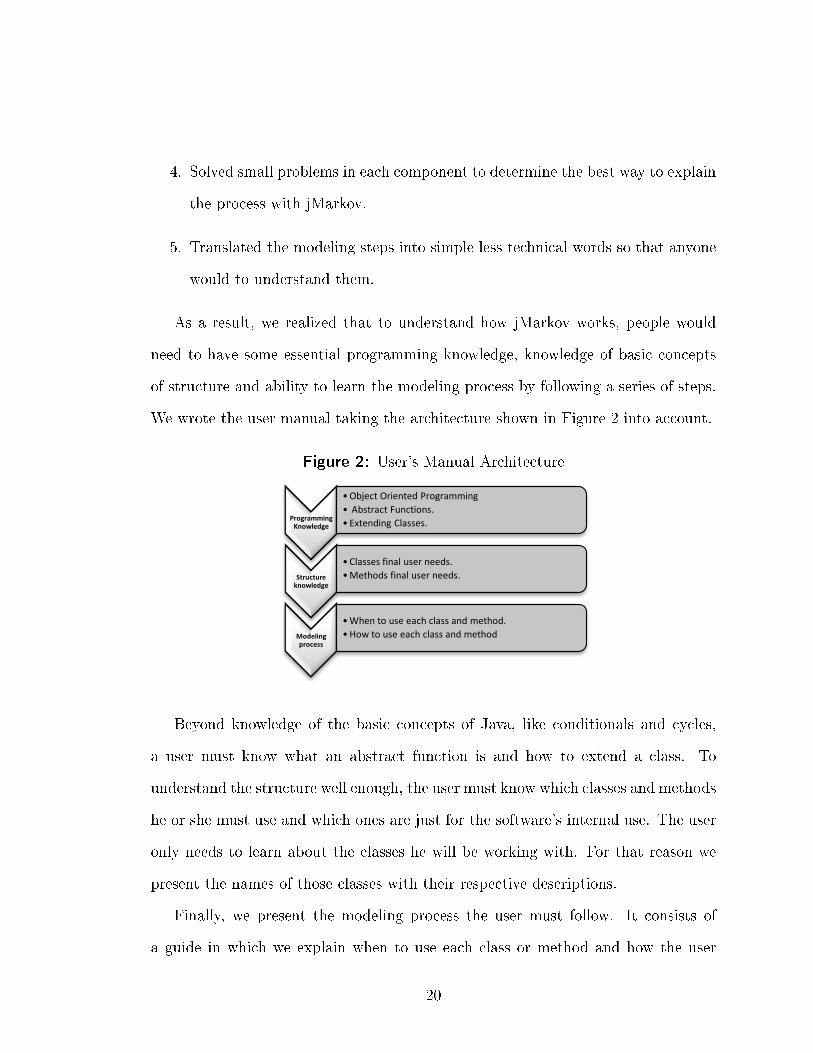
As a result, we realized that to understand how jMarkov works, people would
need to have some essential programming knowledge, knowledge of basic concepts
of structure and ability to learn the modeling process by following a series of steps.
We wrote the user manual taking the architecture shown in Figure 2 into account.
Figure 2: User's Manual Architecture
Programming Knowledge
•Object Oriented Programming
• Abstract Functions.
• Extending Classes.
Structure knowledge
•Classes final user needs.
•Methods final user needs.
Modeling process
•When to use each class and method.
•How to use each class and method
Beyond knowledge of the basic concepts of Java, like conditionals and cycles,
a user must know what an abstract function is and how to extend a class. To
understand the structure well enough, the user must know which classes and methods
he or she must use and which ones are just for the software's internal use. The user
only needs to learn about the classes he will be working with. For that reason we
present the names of those classes with their respective descriptions.
Finally, we present the modeling process the user must follow. It consists of
a guide in which we explain when to use each class or method and how the user
20
should use them. This is followed by an example to better illustrate the point for
the reader.
21

Chapter IV
User Manual
4.1 Programming Knowledge
Java is a high-level programming language created by Sun Microsystems [1]. It
implements an object-oriented approach, the main idea of which can be explained
as "divide and conquer." It assumes that every software program can be divided
into elements or objects, which can be coded separately and then connected to the
others to create a program. This approach is very useful when working with massive
problems.
The object-oriented programming is based on four key principles: abstraction,
encapsulation, inheritance and polymorphism. An excellent explanation of OOP
and the Java programming language can be found in [1].
The abstraction capability is the one that we take the most advantage of for pro-
gramming jMarkov. It consists of the creation of abstract functions and extending
abstract classes.
An abstract function is one in which only the input parameter must be de�ned,
and the output type is returned without coding the function implementation. The
modeler can use an abstract function to program the di�erent algorithms, which
22
work the same without taking into account the di�erent implementations the ab-
stract elements can have.
Extending abstract classes consists of creating general classes that will later help
code particular ones. In a general class we code the algorithms and the abstract
functions. Later, when the user wants to model something, he just needs to extend
an abstract class. By doing so, he must code the abstract functions in the extending
class, so the model can compile and run. Thanks to this, the user does not need
to worry about the coding the extended class; he only needs to be concerned with
coding the few abstract functions.
4.2 Structure Description
In this section we discuss the classes that are part of the modeling process and that
have a direct relationship to the user. The focus of this document is to give new
users the key elements necessary to model with jMarkov and to give an idea of the
software's capabilities. If the reader wants details about the solving packages or the
architecture of the coding in the software, please refer to the reference provided in
each subsection. The following subsections describe each of the important packages,
limiting the explanation to the de�nition of the classes the user needs in order to
create a model.
4.2.1 jMarkov.basic
This package is a collection of classes designed to represent the most basic elements
that interact in any kind of Markov chain or MDP. Figure 3 shows the name of the
main classes in the packages that the user should extend to model a problem.
The state class represents a state in a Markov Chain or MDP. The user of the
class should establish the coding convention and code the compareTo method. In the
23

Figure 3: The main classes of the basic package
jmarkov.basic
ActionEventState
PropertiesEventPropertiesState PropertiesAction
compareTo method the user should give a formula of how the computer must organize
the states. In other words, when comparing two states, the system must determine
which is larger. This is done to create an organized data structure to facilitate
internal searching. The coding convention means that the user should code the data
structure, where the states are going to be saved, while coding the construction
method on the extended class. That data structure, along with the compareTo, must
be established. A complete element order is needed since, for e�ciency, jMarkov
works with ordered sets.
The package also provides a class, called PropertiesState, with a default order
process to do general-problem modeling. It has all the methods implemented in
the state class and it orders the states by an array of integer-valued properties, so
the user does not have to be concerned with the structure or the comparison. In
conclusion, if the state can be represented with a vector of integers describing its
properties, then it might be easier to implement PropertiesState class rather than
state class.
The same situation works with the Event class versus PropertiesEvent class and
Action class versus PropertiesAction class. The class Event allows the user to de�ne
the implementation of the events that can alter the states of the Markov chain. The
class Action represents a single action in MDP.
24
4.2.2 jMarkov and jQBD
In this package the user can �nd all the classes needed to model a Markov chain or
a QBD. Figure 4 shows two main classes: Simple MarkovProcess and GeomProcess.
For a more detailed explanation, see [45]
Figure 4: The main classes of the jMarkov modeling package
The Simple MarkovProcess class is the more general, and it is the class used to
create a CTMC or DTMC with a �nite state space. The class generates the model
through the buildRS algorithm (See Figure 5). This enables it to generate all states
and the transition matrix from the behavior rule speci�ed by the user. These rules
are determined by implementing the methods active, dests and rate.
The class GeomProcess represents a continuous or discrete QBD process. This
class extends the class Simple MarkovProcess. The building algorithm uses the in-
formation stored about the dynamics of the process to explore the graph and build
only the �rst three levels of the system. From this, extracting matrices B00, B01,
B10, A0, A1, and A2 is straightforward. Once these matrices are obtained, the sta-
bility condition is checked. If the system is found to be stable, then the matrices A0,
A1, and A2 are passed to the solver, which takes care of computing the matrix R
and the steady-state probabilities vectors π0 and π1, using the formulas described
above. The implemented solver uses the logarithmic reduction algorithm [27].
4.2.2.1 Space state building algorithm
Transitions in a CTMC are triggered by the occurrence of events such as arrivals
and departures. The matrix Q can be decomposed as Q =∑
e∈E Q(e), where Q(e)
25
contains the transition rates associated with event e, and E is the set of all possible
events that may occur.
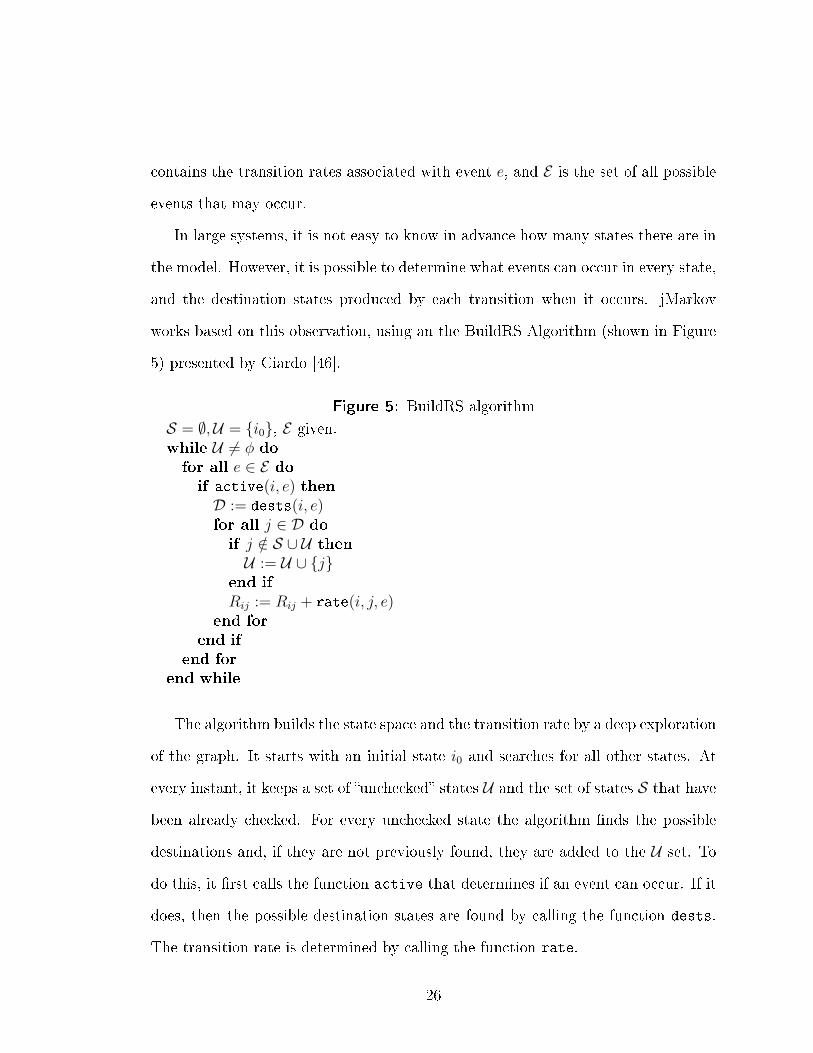
In large systems, it is not easy to know in advance how many states there are in
the model. However, it is possible to determine what events can occur in every state,
and the destination states produced by each transition when it occurs. jMarkov
works based on this observation, using an the BuildRS Algorithm (shown in Figure
5) presented by Ciardo [46].
Figure 5: BuildRS algorithm
S = ∅,U = {i0}, E given.while U 6= φ dofor all e ∈ E doif active(i, e) thenD := dests(i, e)for all j ∈ D do
if j /∈ S ∪ U then
U := U ∪ {j}end if
Rij := Rij + rate(i, j, e)end for
end if
end for
end while
The algorithm builds the state space and the transition rate by a deep exploration
of the graph. It starts with an initial state i0 and searches for all other states. At
every instant, it keeps a set of �unchecked� states U and the set of states S that have
been already checked. For every unchecked state the algorithm �nds the possible
destinations and, if they are not previously found, they are added to the U set. To
do this, it �rst calls the function active that determines if an event can occur. If it
does, then the possible destination states are found by calling the function dests.
The transition rate is determined by calling the function rate.
26

From this algorithm, we can see that a system is fully described once the states
and events are de�ned and the functions active, dests, and rate have been spec-
i�ed. As we will see, modeling a problem with jMarkov entails coding these three
functions.
4.2.2.2 User Interface
The packages of jMarkov and jQBD have a graphic interface, where the results of
the model are shown. Figure 6 shows the �rst view of the interface. Figure 7 shows
the toolbar found in the interface. Finally, �gure 8 shows a close-up of the di�erent
views of the program.
Figure 6: The User Interface of jMarkov and jQBD
Figure 7: The Toolbar
Explanation of each view:
27

Figure 8: The Interface Views
• Browse: Provides visualization of the entire system graphically. It shows the
states, events and transition probabilities in tree form.
• States: Shows all the states of the system with their respective equilibrium
probabilities.
• Rates: Shows the transition probabilities.
• MOPs: Shows the mean and the standard deviation of the system's Measures
of performance (MOP). These measures are calculated by default in some
cases, but in most the user has to code them.
• Events: Shows the system's events with the event occurrence rate as shown.
This rate indicates the expected value of occurrence of each event in a speci�c
period.
• Output: Shows a summary of all the other views, making copying and past-
ing the results in a text �le easy. Any �exible output mechanism can be
programmed from the code, bypassing the graphical interface.
4.2.3 jPhase
As explained before in section 2.4, to completely represent a continuous Phase-type
distribution (PH distribution), a user only needs the generator matrix Q and the
vector of initial probabilities or the transition probability matrix P and the vector of
28

initial probabilities for represent a discrete one. In jPhase, the user can represent the
matrix and the vector in dense or sparse form. The dense form consists of putting
the entire matrix with all its zeros. This is useful for many applications, where the
number of phases is not large and memory is not a problem. However, the sparse
form shows only the numbers di�erent from zero, so it uses a compressed sparse row.
This two types of representation are the reason why the structure of the package
shown in �gure 9 is made up of four modeling classes, the ones that the user will
usually manipulate. For further explanation of the structure of the package, refer
to [47].
Figure 9: The jPhase Main Classes
jphase
SparseContPhaseVarDenseDiscPhaseVarSparseDiscPhaseVar DenseContPhaseVar
The DenseContPhaseVar and DenseDiscPhaseVar are classes that represent con-
tinuous and discrete PH distributions with a dense representation. They have
constructors for many simple distributions, such as exponential or Erlang in the
continuous case and geometric or negative binomial in the discrete case. The
SparseContPhaseVar and SparseDiscPhaseVar classes represent continuous and dis-
crete PH distributions with a sparse representation.
4.2.3.1 jFitting
The jFitting module is a complement of jPhase and allows �tting a set of data of
a distribution to a PH distribution. Di�erent �tting algorithms can be classi�ed in
two major groups: maximum-likelihood methods and moment-matching techniques.
Some algorithms, believed to be representative of each group, are coded in di�erent
29

classes in the package and described below. For further explanation, refer to [47].
1. Moment Matching
• MomentsACPH2Fit: Implements the acyclic continuous PH distributions of
second order. This is for the continuous case [36].
• MomentsADPH2Fit: Implements the acyclic discrete PH distributions of
second order. This is for the discrete case [36].
• MomentsECCompleteFit: Erlang-Coxian distributions. The method matches
the �rst three moments of any distribution to a subclass of phase-type dis-
tributions known as Erlang-Coxian distributions. This class implements
the complete solution [37].
• MomentsECPositiveFit: Erlang-Coxian distributions. This class imple-
ments the positive solution [37].
• MomentsACPHFit: Acyclic PH distributions. The method matches the �rst
three moments of any distribution to a subclass of phase-type distribu-
tions known as acyclic phase-type distributions [38].
2. Maximum Likelihood Estimate (MLE)
• EMPhaseFit: EM for general PH distributions. The method �ts any dis-
tribution to the entire class of phase-type distributions [33].
• EMHyperExpoFit: EM for hyper-exponential distributions. The method
�ts heavy-tailed distributions to the class of hyper-exponential distribu-
tions [34].
30

• EMHyperErlangFit: EM for hyper-Erlang distributions. The method �ts
any distribution to a subclass of phase-type distributions known as hyper-
Erlang distributions [35].
4.2.3.2 Users Interface
Figure 10 shows the user interface of jPhase packages. The interface has three
important views. The �rst one shows the parameters of the PH distributions (the
matrix and the initial vectors), the other two show a graphic of the PDF and the
CDF, respectively.
Figure 10: The jPhase Interface
Figure 10 shows the user interface of jPhase packages. The interface has three
important views. The �rst one shows the parameters of the PH distributions (the
matrix and the initial vectors); the other two show a graphic of the PDF and the
CDF, respectively.
Figure 11 shows the interface for creating a new PH distribution, with examples
of the most common distributions already coded in the packages. The Figure 12
also shows the options for choosing the �tting algorithm that the user wants to use.
31
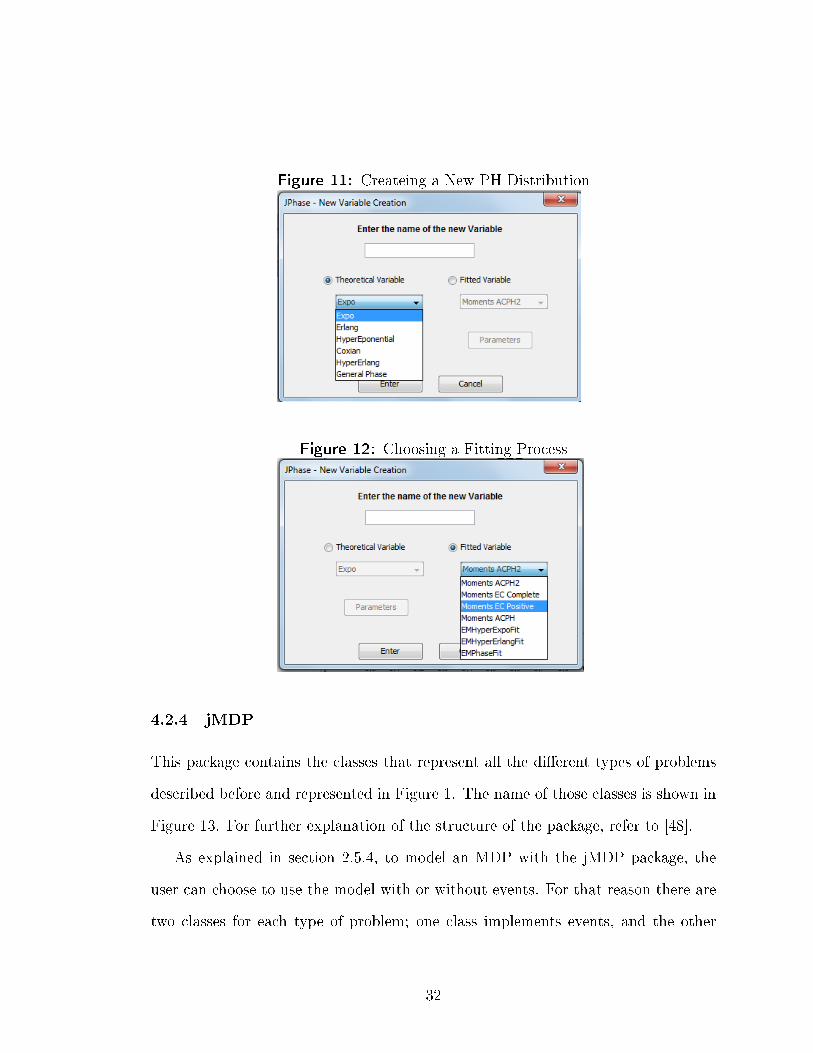
Figure 11: Createing a New PH Distribution
Figure 12: Choosing a Fitting Process
4.2.4 jMDP
This package contains the classes that represent all the di�erent types of problems
described before and represented in Figure 1. The name of those classes is shown in
Figure 13. For further explanation of the structure of the package, refer to [48].
As explained in section 2.5.4, to model an MDP with the jMDP package, the
user can choose to use the model with or without events. For that reason there are
two classes for each type of problem; one class implements events, and the other
32
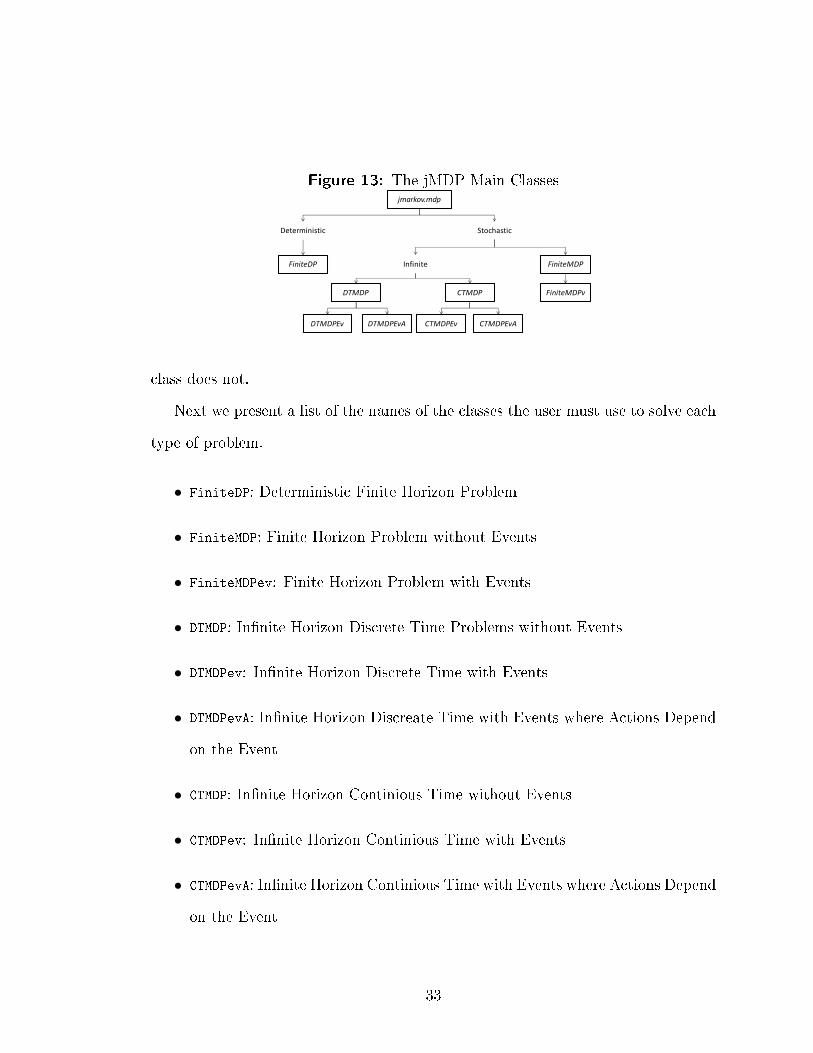
Figure 13: The jMDP Main Classes
jmarkov.mdp
DTMDP
FiniteMDPFiniteDP
FiniteMDPv
Deterministic Stochastic
Infinite
CTMDP
DTMDPEvADTMDPEv CTMDPEvACTMDPEv
class does not.
Next we present a list of the names of the classes the user must use to solve each
type of problem.
• FiniteDP: Deterministic Finite Horizon Problem
• FiniteMDP: Finite Horizon Problem without Events
• FiniteMDPev: Finite Horizon Problem with Events
• DTMDP: In�nite Horizon Discrete Time Problems without Events
• DTMDPev: In�nite Horizon Discrete Time with Events
• DTMDPevA: In�nite Horizon Discreate Time with Events where Actions Depend
on the Event
• CTMDP: In�nite Horizon Continious Time without Events
• CTMDPev: In�nite Horizon Continious Time with Events
• CTMDPevA: In�nite Horizon Continious Time with Events where Actions Depend
on the Event
33

4.3 Modeling Process
In this section we explain the jMarkov package modeling process. We use a sim-
ple example just for educational reasons, not because the program cannot handle
complex examples (it was actually built for that), but because we think it would be
easier to understand the modeling process with an example for which the reader will
not need to spend too great of an e�ort to understand what the software is doing.
Throughout the section we will add some features to the initial problem so we can
show how the entire software works with the same example. Proper following of the
steps described in this section will allow the problem to be solved. In every step we
also include the code used to solve the problem.
Consider a queuing system comprised of two parallel servers, each one with a
service time that follows an exponential distribution with rate µ1 for server 1 and
µ2 for server 2. The entities arrive at a single queue, and as both servers can attend
all the clients, the entities go to the idle one. If both servers are idle there is a
α probability that the entity will go to server 1 instead of to server 2. The time
between entity arrivals at the queue follows an exponential distribution with rate λ.
The queue has a �nite capacity N . The problem represents a very common queuing
model, more speci�cally an M/M/2/N problem.
4.3.1 jMarkov.basic
First we need to identify the basic components of the model. As it is a Markov
chain, those are states and events.
1. De�ne the states of the Markov chain. We decided that the states in the
34
problem would have three dimensions. We identi�ed each state with the triplet
(X, Y, Z), where X and Y are the status of the servers. They can take the
values of 0 if the server is idle or 1 if it is busy. Z is the queue number that
can take the values of (0, 1, ..., N − 2).
• We extend the class PropertiesState. The explanation of this class can
be found in section 4.2.1. Note that MM2dNState is the name of the class,
and is chosen by the user.
class MM2dNState extends Prope r t i e sS t a t e { . . . }
• Code the construction method. The user must de�ne the space state
here; in our case it is the triplet (X, Y, Z).
MM2dNState( int x , int y , int z ) {
super (3 ) ;
this . prop [ 0 ] = x ;
this . prop [ 1 ] = y ;
this . prop [ 2 ] = z ;
}
From the last method we can make some remarks. The super(3) is a
method normally used when extending classes. Our class extends from
PropertiesState, which had its own constructor that determines the cod-
ing convention (see 4.2.1). The super(3) tells the computer to use the
constructor of the extended or super class (PropertiesState) and the
number 3 conveys that the state space has 3 dimensions or properties.
The PropertiesState organizes the states in a vector of integers, so we
need to clarify in which position of the vector the value of each property
is going to be saved. The line this.prop[0] = x does that.
35
• Code the measures of performance (MOPs) we want to calculate for each
state. For our example, we �nd the level of utilization for each server, the
average queue length and the average number of entities in the system.
Note that we separate the method into many sub-methods. This is not
necessary, but it is good programming practice to create cleaner code.
public void computeMOPs(MarkovProcess mp) {
setMOP(mp, " U t i l i z a t i o n Server A" , getStatus1 ( ) ) ;
setMOP(mp, " U t i l i z a t i o n Server B" , ge tStatus2 ( ) ) ;
setMOP(mp, "Queue Length" , getQSize ( ) ) ;
setMOP(mp, "Number in System" , getStatus1 ( ) + getStatus2 ( ) +
getQSize ( ) ) ;
}
public int getStatus1 ( ) {
return prop [ 0 ] ;
}
public int getStatus2 ( ) {
return prop [ 1 ] ;
}
public int getQSize ( ) {
return prop [ 2 ] ;
}
Note that the method received by parameter a MarkovProcess. This is
the class that represents the Markov chain that will be explained later.
The line setMOP(...) is used to set any MOP the user needs to �nd.
It received by parameters the process (mp), an string with the label of
the MOP (Utilization Server A) and the value of the MOP in the state
(getStatus1()).
• Finally, for the interface, the user can program the methods label() and
description(), where he or she can enter a description of the state space
and the labels from every state, which will be shown on the interface.
36
public St r ing label ( ) {
St r ing s tg = "Empty system" ;
i f ( ( ge tStatus1 ( ) == 1) && ( getStatus2 ( ) == 0) )
s tg = " Server 1 busy / Server 2 i d e l / Numeber in l i n e 0" ;
i f ( ( ge tStatus2 ( ) == 1) && ( getStatus1 ( ) == 0) )
s tg = " Server 1 i d l e / Server 2 busy / Numeber in l i n e 0" ;
i f ( ( ge tStatus2 ( ) == 1) && ( getStatus1 ( ) == 1) )
s tg = " Server 1 busy / Server 2 busy / Numeber in l i n e : " +
( getQSize ( ) ) ;
return s tg ;
}
public St r ing d e s c r i p t i o n ( ) {
St r ing s tg = "" ;
s tg += "Server 1 i s " + ( ( getStatus1 ( ) == 1) ? "busy" : " i d l e " ) ;
s tg += " . Server 2 i s " + ( ( getStatus2 ( ) == 1) ? "busy" : " i d l e " ) ;
s tg += " . There are " + getQSize ( ) + " customers wai t ing in queue . " ;
return s tg ;
}
2. De�ne the events. Each event here represents the happenings that can change
the state of the system. In our example the events can be explained as the
arrival of a new entity to the system or the departure of an entity from the
system.
• We will extend the class Events. The explanation of this class can be
found in section 4.2.1. Note that QMM2dNEvent is the name of the class,
and it is chosen by the user.
class QMM2dNEvent extends Event { . . . }
• Create constants that represent each event with an integer. This is done
so the computer can distinguish between each event. Note that we sepa-
rate the two events into more speci�c ones. This is done to facilitate the
37
coding of the model.
public enum Type {
ARRIVAL,
ARRIVAL1,
ARRIVAL2,
DEPARTURE1,
DEPARTURE2;
}
The event ARRIVAL represents a general arrival to the system. The ARRIVAL1
represents an arrival to server 1 and is only used when the system is idle.
The ARRIVAL2 represents an arrival to server 2 and is only used when the
system is idle. The DEPARTURE1 represents a departure from server 1 and
DEPARTURE2 represents a departure from server 2. This method enum can
be changed by declaring a constant for each event that is shown as follow.
f ina l stat ic int ARRIVAL = 0 ;
f ina l stat ic int ARRIVAL1 = 1 ;
f ina l stat ic int ARRIVAL2 = 2 ;
f ina l stat ic int DEPARTURE1 = 3 ;
f ina l stat ic int DEPARTURE2 = 4 ;
• Code the constructor of the class. Here we also need to declare an at-
tribute that will represent the type of event it will be.
private Type type ;
public QMM2dNEvent(Type nType ) {
super ( ) ;
type = nType ;
}
Note that in the declaration of the attribute the type of the attribute is
Type, the name of the enum already shown. If we were using the constant
38
forms, the type of the attribute would be an integer and would look like
this: private int type;.
• Now we need to code a method that returns a list of all events. This
would be necessary when coding the actual Markov process. Note that
the EventsSet is a data structure also provided with the packages, a
special structure that works like a list.
public stat ic EventsSet<QMM2dNEvent> getAl lEvents ( ) {
EventsSet<QMM2dNEvent> evSet = new EventsSet<QMM2dNEvent>() ;
for (Type type : Type . va lue s ( ) )
evSet . add (new QMM2dNEvent( type ) ) ;
return evSet ;
}
• Finally, as in the state, we can choose to code the method label for the
events. It is a requirement for the graphic interface.
public St r ing label ( )
{
St r ing s tg = "" ;
switch ( type )
{
case ARRIVAL:
s tg = "Arr i va l o f the system" ;
break ;
case ARRIVAL1:
s tg = "Arr i va l to s e r v e r 1 , (Only both I d l e ) " ;
break ;
case ARRIVAL2:
s tg = "Arr i va l to s e r v e r 2 , (Only both I d l e ) " ;
break ;
case DEPARTURE1:
s tg = "Departure from se rv e r 1" ;
break ;
case DEPARTURE2:
39

s tg = "Departure from se rv e r 2" ;
break ;
}
return s tg ;
}
4.3.2 jMarkov
Now that we have coded the basic components, we are going to program the actual
process.
1. We need to extend the class that represents a �nite state Markov chain. As
shown in 4.2.2, this class name is SimpleMarkovProcess. Note that, as before,
the name of our class is QueueMM2dN and is de�ned by the user. After extending
the class we need to clarify the name of the classes that represents the state
and the event in the code. In our example the state is MM2dNState and the
event is QMM2dNEvent.
public class QueueMM2dN extends SimpleMarkovProcess<MM2dNState , QMM2dNEvent>
{ . . . }
2. We need to code the constructor of the process. We need to create an attribute
for each initial parameter, and we must initialize them in the method.
private double lambda ;
private double mu1, mu2 , alpha ;
private int N;
public QueueMM2dN(double nLambda , double nMu1, double nMu2, double nAlpha ,
int nN) {
super ( (new MM2dNState (0 , 0 , 0) ) , QMM2dNEvent . getAl lEvents ( ) ) ;
lambda = nLambda ;
mu1 = nMu1 ;
mu2 = nMu2 ;
alpha = nAlpha ;
40
N = nN;
}
Note that in the method we need to de�ne an initial state. This is essential to
the algorithm explained in 4.2.2.1. In our case we are saying the initial state
is when the system is idle. We are also calling the method getAllEvents, as
explained in the last section.
3. We had to code the three methods needed for the creation of the process,
which are also explained in the algorithm 4.2.2.1. They are the active method,
the destinations method and the rates method.
• Code the active method. Here we must de�ne the set of feasible events
that can occur when staying in state i. To do so, we need to specify what
conditions the state i has to meet for the event e to occur. For example,
if the system is full there cannot be more arrivals, as a server cannot
attend to two entities at the same time.
public boolean a c t i v e (MM2dNState i , QMM2dNEvent e ) {
boolean r e s u l t = fa l se ;
switch ( e . getType ( ) ) {
case ARRIVAL:
r e s u l t = ( ( i . getQSize ( ) < N − 2) &&
( getStatus1 ( ) + getStatus2 ( ) + getQSize ( ) != 0) ;
break ;
case ARRIVAL1:
r e s u l t = i . isEmpty ( ) ;
break ;
case ARRIVAL2:
r e s u l t = i . isEmpty ( ) ;
break ;
case DEPARTURE1:
r e s u l t = ( i . ge tStatus1 ( ) > 0) ;
41

break ;
case DEPARTURE2:
r e s u l t = ( i . ge tStatus2 ( ) > 0) ;
break ;
}
return r e s u l t ;
}
• Code the dest method. Here the user must de�ne the set of reachable
states from state i, given that event e occurs. For our example, we need
to specify that when an arrival occurs it can be attended by an idle server
or it can go to the queue, and when a departure occurs, if there is another
in the line, it will be attended or the server will become idle. In other
words, we need to de�ne the new state j to which the system will go if it
is in state i and the event e happens.
public States<MM2dNState> de s t s (MM2dNState i , QMM2dNEvent e ) {
int newx = i . ge tStatus1 ( ) ;
int newy = i . ge tStatus2 ( ) ;
int newz = i . getQSize ( ) ;
switch ( e . getType ( ) ) {
case ARRIVAL:
i f ( i . ge tStatus1 ( ) == 0) {
newx = 1 ;
}
else i f ( i . ge tStatus2 ( ) == 0) {
newy = 1 ;
}
else {
newz = i . getQSize ( ) + 1 ;
}
break ;
case ARRIVAL1:
newx = 1 ;
break ;
42
case ARRIVAL2:
newy = 1 ;
break ;
case DEPARTURE1:
i f ( i . getQSize ( ) != 0) {
newx = 1 ;
newz = i . getQSize ( ) − 1 ;
} else {
newx = 0 ;
}
break ;
case DEPARTURE2:
i f ( i . getQSize ( ) != 0) {
newy = 1 ;
newz = i . getQSize ( ) − 1 ;
} else {
newy = 0 ;
}
break ;
}
return new StatesSet<MM2dNState>( new MM2dNState(newx , newy , newz ) ) ;
}
Note that in the code we are �rst initializing each one of the properties
of the state by putting its values in state i. Then we create a condi-
tional function in which we code what changes in each property when the
event e occurs. Finally, we return the state j with the new values of the
properties.
• Code the rate method. Here we de�ne the transition probabilities for
passing between states.
public double r a t e (MM2dNState i ,MM2dNState j , QMM2dNEvent e ) {
double r e s = 0 ;
switch ( e . getType ( ) ) {
case ARRIVAL:
43
r e s = lambda ;
break ;
case ARRIVAL1:
r e s = lambda ∗ alpha ;
break ;
case ARRIVAL2:
r e s = lambda ∗ (1 − alpha ) ;
break ;
case DEPARTURE1:
r e s = mu1 ;
break ;
case DEPARTURE2:
r e s = mu2 ;
break ;
}
return r e s ;
}
4. The user can choose to code the description method which is the one that
describes the system, it is just used for the graphic interface.
public St r ing d e s c r i p t i o n ( ) {
return "M/M/2/N SYSTEM Queueing System with two s e r v e r s (1 , 2) , with r a t e s
"
+ mu1 + " and " + mu2 + " . Ar r i v a l s are Poisson with ra t e "
+ lambda +" and the maximum number in the system (N) i s " + N;
}
5. Finally, we need to code the main method of the problem. In this method we
initialized the problem, which is the one the computer is going to run when
running the package. This is where the user must de�ne the value of the initial
parameters (µ1, µ2, λ, N and α).
public stat ic void main ( St r ing [ ] a ) {
double lda = 5 ;
44

double mu1 = 3 ;
double mu2 = 2
double alpha = 0 . 6 ;
int N = 10 ;
QueueMM2dN theQueue = new QueueMM2dN( lda , mu1 , mu2 , alpha , N) ;
theQueue . showGUI ( ) ;
theQueue . p r i n tA l l ( ) ;
}
4.3.2.1 Results
In this part we will show the results of the problem given by the software. We
will skip them in the following section, since our intention in showing them is to
demonstrate the utility of the software, and showing the same result format twice
would be redundant.
M/M/2/N SYSTEM
Queueing System with two s e r v e r s (1 , 2) , with r a t e s 3 .0 and 2 . 0 . A r r i v a l s are
Poisson with ra t e 5 .0 and the maximum number in the system (N) i s 10 .
System has 12 Sta t e s .
EQUILIBRUM
STATE PROBAB.
Empty system 0.04639
Server 1 i d l e / Server 2 busy / 0 l i n e 0 .05412
Server 1 busy / Server 2 i d l e / 0 l i n e 0 .04124
Server 1 busy / Server 2 busy / 0 l i n e 0 .09536
Server 1 busy / Server 2 busy / 1 l i n e 0 .09536
Server 1 busy / Server 2 busy / 2 l i n e 0 .09536
Server 1 busy / Server 2 busy / 3 l i n e 0 .09536
Server 1 busy / Server 2 busy / 4 l i n e 0 .09536
Server 1 busy / Server 2 busy / 5 l i n e 0 .09536
Server 1 busy / Server 2 busy / 6 l i n e 0 .09536
Server 1 busy / Server 2 busy / 7 l i n e 0 .09536
Server 1 busy / Server 2 busy / 8 l i n e 0 .09536
MEASURES OF PERFORMANCE
NAME MEAN SDEV
45

Ut i l i z a t i o n Server A 0.89948 0.30069
U t i l i z a t i o n Server B 0.91237 0.28275
Queue Length 3.43299 2.76915
Number in System 5.24485 3.03406
EVENTS OCCURANCE RATES
NAME MEAN RATE
Arr i va l o f the system 4.29124
Ar r i va l to s e r v e r A, (Only both I d l e ) 0 .13918
Ar r i va l to s e r v e r B, (Only both I d l e ) 0 .09278
Departure from se rv e r A 2.69845
Departure from se rv e r B 1.82474
4.3.3 jQBD
This package models in�nite Markov chains, so it is similar in many ways to the
one explained before. In that order of ideas we are just explaining the di�erences
between the coding procedures between them.
Consider the last example but with the following changes. The queue is an
in�nite one and the servers are not in parallel but in series and both cannot be busy
at the same time. In other words, until an entity has �nished the process with server
1 and then with server 2, the next entity cannot start its own process.
The basic components are still almost the same. The state class becomes the
duplet (X, Y ). We have to delete the property Z, because now the number of entities
is in�nite, so keeping track of that is impossible. The change in the event is the
deletion of the event ARRIVAL2, because now the servers are in series so the entities
always have to arrive �rst at server 1 and then at server 2. The rest of the coding
stays the same.
The di�erences are not great in the process of modeling a QBD. The methods
are the same, and the di�erences lie only in the extended class. As the queue is
46
in�nite, we have to work with something we call the relative level. Remember that
in section 2.3 we explained the relative level and that it was in�nite. So the relative
level just shows whether the system will go one level up, go one level down or stays
the same. This last one means a change in the phase of the system. Next we will
show the problem's code and explain it in detail.
• The class that should be extended is called GeomProcess. The class GeomPro-
cess represents a continuous time or discrete time quasi-birth-death process.
This class extends the class SimpleMarkovProcess. The class generates the G
matrix through the logarithmic reduction algorithm.
public class QueueMM2 extends GeomProcess<MM2State , QMM2Event> { . . . }
• We present the active method next. Here we must de�ne the set of feasible
events that can occur while staying in state i and absolute level l. The absolute
level is the real level the system is in, and the relative level can be understood
as the change in the absolute level.
public boolean a c t i v e (MM2State i , int l , QMM2Event e ) {
boolean r e s u l t = fa l se ;
switch ( e . getType ( ) ) {
case ARRIVAL:
r e s u l t = ( l != 0) ;
break ;
case ARRIVAL1:
r e s u l t = ( l == 0) ;
break ;
case DEPARTURE1:
r e s u l t = ( i . ge tStatus1 ( ) == 1) ;
break ;
case DEPARTURE2:
r e s u l t = ( i . ge tStatus2 ( ) == 1) ;
break ;
47

}
return r e s u l t ;
}
Note that we now use the absolute level to de�ne the events that will be active
in every case. For example, for event ARRIVAL to occur, the system cannot be
empty, so the level has to be greater than 0; however, for the event ARRIVAL1,
the arrival when the system is idle, to occur, the system has to be empty, so
the absolute level has to be 0.
• We present the dest method next. Here we must de�ne the set of reachable
states from state i, given that event e occurs and we are in absolute level l.
public GeomRelState<MM2State>[ ] d e s t s (MM2State i , int l , QMM2Event e ) {
int newx = i . ge tStatus1 ( ) ;
int newy = i . ge tStatus2 ( ) ;
int rLeve l = 0 ;
switch ( e . getType ( ) ) {
case ARRIVAL:
rLeve l = 1 ;
break ;
case ARRIVAL1:
newx = 1 ;
rLeve l = 1 ;
break ;
case DEPARTURE1:
newy = 1 ;
newx = 0 ;
break ;
case DEPARTURE2:
i f ( l == 1) {
newy = 0 ;
newx = 0 ;
} else {
rLeve l = −1;
48
newy = 0 ;
newx = 1 ;
}
break ;
}
MM2State newSubState = new MM2State (newx , newy) ;
GeomRelState<MM2State> s ;
i f ( e . getType ( ) == Type .DEPARTURE2 && l == 1)
{
s = new GeomRelState<MM2State> ( newSubState ) ;
} else {
s = new GeomRelState<MM2State> ( newSubState , rLeve l ) ;
}
StatesSet<GeomRelState<MM2State>> s t a t e s S e t
= new StatesSet< GeomRelState <MM2State>> ( s ) ;
return s t a t e s S e t . toStateArray ( ) ;
}
Note that in the method we used the relative level (rLevel) to de�ne the next
stage j. Also note that as the method dest coded in jMarkov, the method has
to return the new state, but in this case the process is longer. That process
occurs as follows. First, we create the new state j, as done before. Next, we
use an abstract class called GeomRelState, which receives as its parameter the
new state j. Then we use a data structure, provided in the package, called
StatesSet, whose function is to store the states. Finally, call the method
toStateArray from the data structure class. This process can appear di�cult,
but it is actually quite mechanical, since the problem does not matter; the
process must always be done the same way. We do not show the other methods
here, because the coding is the same as in the last section.
49
4.3.4 jPhase
This subsection has two parts: �rst, the jPhase package modeling explanation, and
second, how to connect this package to the last two, especially with jQBD. The
subsection is divided thus because it is important to show the entire functionality of
this package and how useful it becomes when used together with the other packages.
4.3.4.1 Modeling with jPhase
The package's main purpose is the generation of PH distributions, meaning that the
package returns the matrix and the vector needed to de�ne any kind of PH distribu-
tion. The package also calculates the cumulative distribution function (CDF) and
the probability density function (PDF). This package works in four ways:
1. The most used PH distributions are already coded in the package, so a user
only needs to call them as if he or she is calling a normal method. The
continuous PH distributions that are coded are Erlang, exponential, hyper-
exponential, hyper-Erlang, Coxian, Erlang-Coxian, and the discrete PH dis-
tributions that are coded are geometric and negative binomial.
For example, suppose we want to �nd the probability that a random variable
that follows an Erlang distribution, with λ = 5 and 2 phases, takes a value
less than 2. Note that in this case we are throwing the result by console, but
it can be also shown in the interface. We did not show it in the interface since
using the interface would prohibit us from seeing the code.
private void example0 ( ) {
System . out . p r i n t l n ( "EXAMPLE 0" ) ;
ContPhaseVar v1 = DenseContPhaseVar . Erlang (5 , 2) ;
System . out . p r i n t l n ( "P( v1 <= 2.0 ) : \ t " +v1 . cd f ( 2 . 0 ) ) ;
}
50
2. Another way of generating a PH distribution is by using the closure properties.
These properties dictate that the result of operating two PH distributions will
also be a PH distribution. The closure properties that are coded in the package
are shown following their respective names in the code.
• sum(X): Convolution between the original distribution and X
• sumGeom(P): Computes the convolution of a geometric number (with pa-
rameter P ) of i.i.d. PH distributions as the original one
• sumPH(P): Convolution of a discrete PH(P ) number of i.i.d. PH distribu-
tions
• mix(P, X): Convex mixture between the original distribution (weight P )
and Y .
• min(X): Minimum between the original variable and X
• max(X): Maximum between the original variable and X
For example, suppose we have two PH distributions, the same Erlang as before
and an exponential distribution with λ = 3. We want to �nd the PH distri-
bution generated by the sum of the last two. Note that we used the method
toString, which returns the matrix and the vector that de�nes the new PH
distribution.
private void example1 ( ) {
System . out . p r i n t l n ( "EXAMPLE 1" ) ;
ContPhaseVar v1 = DenseContPhaseVar . expo (3 ) ;
ContPhaseVar v2 = DenseContPhaseVar . Erlang (5 , 2) ;
ContPhaseVar v3 = v1 . sum( v2 ) ;
System . out . p r i n t l n ( "v3 : \ n"+v3 . t oS t r i ng ( ) ) ;
}
51

3. The third way consists of knowing the matrix and the vector that completely
de�ne a PH distribution. In that case, users choose the class depending on
whether the PH is continuous or discrete, and then plug in the data. Note that
we are using the classes DenseMatrix and DenseVector, and that the data can
be also supplied sparsely, using the SparseMatrixPanel class and SparseVector
class.
private void example2 ( ) {
System . out . p r i n t l n ( "EXAMPLE 2" ) ;
DenseMatrix A = new DenseMatrix (new double [ ] [ ] { {−4 ,2 ,1} , {1 ,−3 ,1} , {2 ,
1 ,−5} } ) ;
DenseVector alpha = new DenseVector (new double [ ] { 0 . 1 , 0 . 2 , 0 . 2 } ) ;
DenseContPhaseVar v1 = new DenseContPhaseVar ( alpha , A) ;
double rho = 0 . 5 ;
PhaseVar v2 = v1 . waitingQ ( rho ) ;
System . out . p r i n t l n ( "v2 : \ n"+v2 . t oS t r i ng ( ) ) ;
}
4. Finally, we can generate the PH distribution by using the jFitting module. As
previously explained, some algorithms �t a set of data or a distribution to a
PH distribution. The moment matching algorithms receive the moments of
the distribution or data to �t them, and the maximum likelihood algorithms
only receive a set of data for the �tting. If the user wants to �t a distribution
with a maximum likelihood algorithms, he or she needs to generate random
numbers that follow the distribution and use them as a set of data.
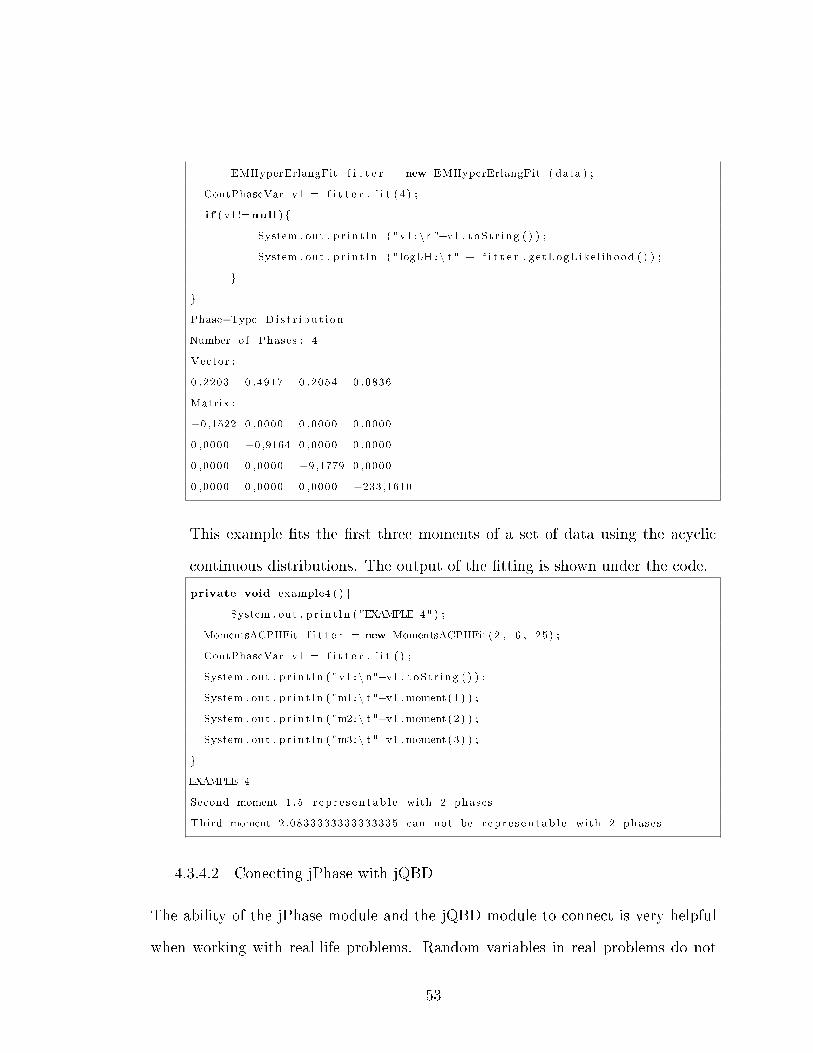
This example �ts a set of data from a plain �le with the hyper-exponential
distribution EMAlgorithm. The output of the �tting is shown under the code.
private void example3 ( ) {
System . out . p r i n t l n ( "EXAMPLE 3" ) ;
double [ ] data = readTextFi l e ( " examples / jphase /W2. txt " ) ;
52
EMHyperErlangFit f i t t e r = new EMHyperErlangFit ( data ) ;
ContPhaseVar v1 = f i t t e r . f i t (4 ) ;
i f ( v1!=null ) {
System . out . p r i n t l n ( "v1 : \ n"+v1 . t oS t r i ng ( ) ) ;
System . out . p r i n t l n ( "logLH :\ t " + f i t t e r . ge tLogLike l ihood ( ) ) ;
}
}
Phase−Type D i s t r i bu t i on
Number o f Phases : 4
Vector :
0 ,2203 0 ,4917 0 ,2054 0 ,0836
Matrix :
−0 ,1522 0 ,0000 0 ,0000 0 ,0000
0 ,0000 −0 ,9164 0 ,0000 0 ,0000
0 ,0000 0 ,0000 −9 ,1779 0 ,0000
0 ,0000 0 ,0000 0 ,0000 −233 ,1610
This example �ts the �rst three moments of a set of data using the acyclic
continuous distributions. The output of the �tting is shown under the code.
private void example4 ( ) {
System . out . p r i n t l n ( "EXAMPLE 4" ) ;
MomentsACPHFit f i t t e r = new MomentsACPHFit (2 , 6 , 25) ;
ContPhaseVar v1 = f i t t e r . f i t ( ) ;
System . out . p r i n t l n ( "v1 : \ n"+v1 . t oS t r i ng ( ) ) ;
System . out . p r i n t l n ( "m1: \ t "+v1 .moment (1 ) ) ;
System . out . p r i n t l n ( "m2: \ t "+v1 .moment (2 ) ) ;
System . out . p r i n t l n ( "m3: \ t "+v1 .moment (3 ) ) ;
}
EXAMPLE 4
Second moment 1 .5 r ep r e s en t ab l e with 2 phases
Third moment 2.0833333333333335 can not be r ep r e s en t ab l e with 2 phases
4.3.4.2 Conecting jPhase with jQBD
The ability of the jPhase module and the jQBD module to connect is very helpful
when working with real-life problems. Random variables in real problems do not
53

normally follow an exponential distribution, so the ability of the jPhase and the
jQBD to combine is a powerful tool when modeling real life problems.
A PH distribution can be modeled with jQBD without the need of jPhase, how-
ever it would be much easier to use them together. The example in section 4.3.3
can be seen as a QBD with a PH distribution. Let us imagine that there are not
two servers, but rather just one server, and the entities have to follow two phases of
service to complete the process. Then we will have an M/PH/1 queue. But work-
ing with just jQBD can be complicated when handling large PH distributions with
many phases. For that reason, working with the two packages together is easier and
very important.
Going back to our example, consider the same system with one queue, but instead
of two servers we have only one, which has a hyper-exponential service time. Let us
suppose the arrivals are also hyper-exponentials.
As always, we must start by coding the basic components. The state space X
would be de�ned as the current phase of the service (1, ..., N) or 0 if the system is
idle, and the events would be just two, an arrival or a departure from the system.
We will skip the coding of these two because it is identical to that explained in the
previous sections.
Then we have to code the QBD process. We just paste the active, dest and
rate methods to show how the packages can connect. We skip the other methods
because they do not present a signi�cant change.
1. Active Method.
public boolean a c t i v e ( HiperExQueueState i , int iLeve l , HiperExQueueEvent e ) {
boolean r e s u l t = fa l se ;
switch ( e . type ) {
case ARRIVAL:
54

r e s u l t = true ;
break ;
case FINISH_SERVICE :
r e s u l t = ( i . getSrvPhase ( ) == e . getCurPH ( ) ) ;
break ;
}
return r e s u l t ;
}
Note that the getSrvPhase asks for the current service phase of state i, but the
getCurPH is asking for the total phases of the hyper-exponential distribution
we are modeling. The ARRIVAL returns true because it is always active, and
the queue in QBD is in�nite.
2. Dests Method.
public GeomRelState<HiperExQueueState >[ ] d e s t s ( HiperExQueueState i ,
int absLevel , HiperExQueueEvent e ) {
Sta t e sSe t <GeomRelState <HiperExQueueState>> de s tS ta t e s
= new Sta t e sSe t <GeomRelState <HiperExQueueState>>() ;
int newPhase = i . getSrvPhase ( ) ;
int rLeve l = 0 ;
switch ( e . type ) {
case ARRIVAL:
rLeve l = +1;
i f ( absLeve l == 0)
addDestsFin i shServer ( rLevel , d e s tS t a t e s ) ;
else
de s tS ta t e s . add (new GeomRelState <HiperExQueueState>(
new HiperExQueueState ( newPhase ) , rLeve l ) ) ;
break ;
case FINISH_SERVICE :
rLeve l = −1;
i f ( absLeve l == 1)
de s tS ta t e s . add (new GeomRelState <HiperExQueueState>
(new HiperExQueueState (0 ) ) ) ;
55

else
addDestsFin i shServer ( rLevel , d e s tS t a t e s ) ;
break ;
}
return de s tS ta t e s . toStateArray ( ) ;
3. Rate Method.
public double r a t e ( HiperExQueueState i , int iLeve l , HiperExQueueState j , int
jLeve l ,
HiperExQueueEvent e ) {
double r a t e = −1;
double [ ] a = se rvD i s t . getMat0Array ( ) ;
switch ( e . type ) {
case ARRIVAL:
i f ( i L ev e l == 0) {
int newPhase = j . getSrvPhase ( ) ;
double alpha [ ] = se rvD i s t . getVectorArray ( ) ;
r a t e = lambda ∗ alpha [ newPhase − 1 ] ;
}
else {
ra t e = lambda ;
}
break ;
case FINISH_SERVICE :
i f ( i L ev e l > 1) {
int newPhase = j . getSrvPhase ( ) ;
double alpha [ ] = se rvD i s t . getVectorArray ( ) ;
r a t e = a [ e . getCurPH ( ) − 1 ] ∗ alpha [ newPhase − 1 ] ;
}
else {
ra t e = a [ e . getCurPH ( ) − 1 ] ;
}
break ;
}
return r a t e ;
56
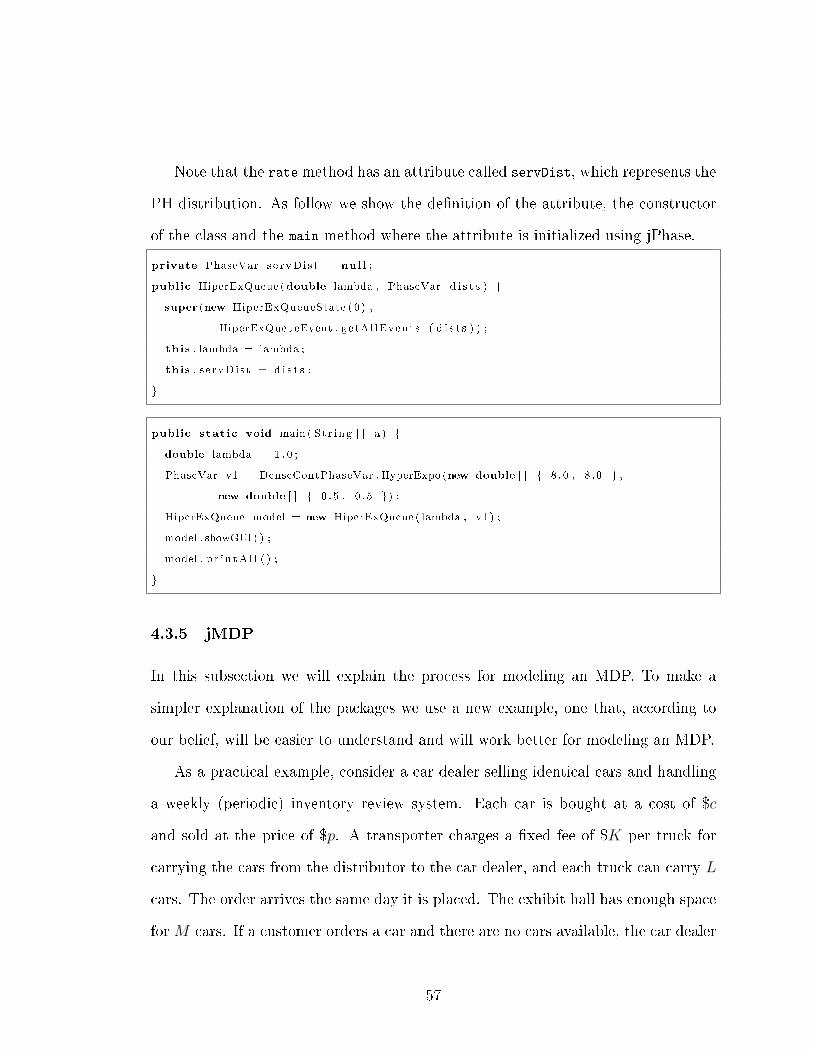
Note that the ratemethod has an attribute called servDist, which represents the
PH distribution. As follow we show the de�nition of the attribute, the constructor
of the class and the main method where the attribute is initialized using jPhase.
private PhaseVar s e rvD i s t = null ;
public HiperExQueue (double lambda , PhaseVar d i s t s ) {
super (new HiperExQueueState (0 ) ,
HiperExQueueEvent . getAl lEvents ( d i s t s ) ) ;
this . lambda = lambda ;
this . s e rvD i s t = d i s t s ;
}
public stat ic void main ( St r ing [ ] a ) {
double lambda = 1 . 0 ;
PhaseVar v1 = DenseContPhaseVar . HyperExpo (new double [ ] { 8 . 0 , 8 . 0 } ,
new double [ ] { 0 . 5 , 0 . 5 }) ;
HiperExQueue model = new HiperExQueue ( lambda , v1 ) ;
model . showGUI ( ) ;
model . p r i n tA l l ( ) ;
}
4.3.5 jMDP
In this subsection we will explain the process for modeling an MDP. To make a
simpler explanation of the packages we use a new example, one that, according to
our belief, will be easier to understand and will work better for modeling an MDP.
As a practical example, consider a car dealer selling identical cars and handling
a weekly (periodic) inventory review system. Each car is bought at a cost of $c
and sold at the price of $p. A transporter charges a �xed fee of $K per truck for
carrying the cars from the distributor to the car dealer, and each truck can carry L
cars. The order arrives the same day it is placed. The exhibit hall has enough space
for M cars. If a customer orders a car and there are no cars available, the car dealer
57

gives him the car as soon as it arrives with a $b discount. The car dealer does not
allow more than B backorders of this type. Holding inventory implies a capital cost
of β annually (in the form of interest rate). The marketing data indicates that the
demand follows a Poisson distribution with a mean of θ cars per week. The dealer
is looking for an optimal ordering policy that minimizes its costs. The rest of this
section describes the detailed modeling process. [48]
Let Dt represent the random weekly demand, pn = P{Dt = n} and qn = P{Dt ≥
n}. The problem is an in�nite-horizon stochastic decision-making problem. It is
possible to model the problem with or without events.
In order to solve the problem, the following steps are to be completed. In every
step we include the code used to solve the problem. For this problem the stages are
de�ned as weeks because, as stated earlier, the inventory review happens weekly.
The modeling process is:
1. De�ne the states of the Markov chain. For our example, each state is the level
of physical inventory (Xt) at the end of week t. The class InvLevel represents
each state.
public class InvLeve l extends StateArray {
public InvLeve l ( int k ) {
super (new int [ ] {k}) ;
}
public int getLeve l ( ) {
return s t a tu s [ 0 ] ;
}
public St r ing label ( ) {
return "Leve l " + getLeve l ( ) ;
}
}
58
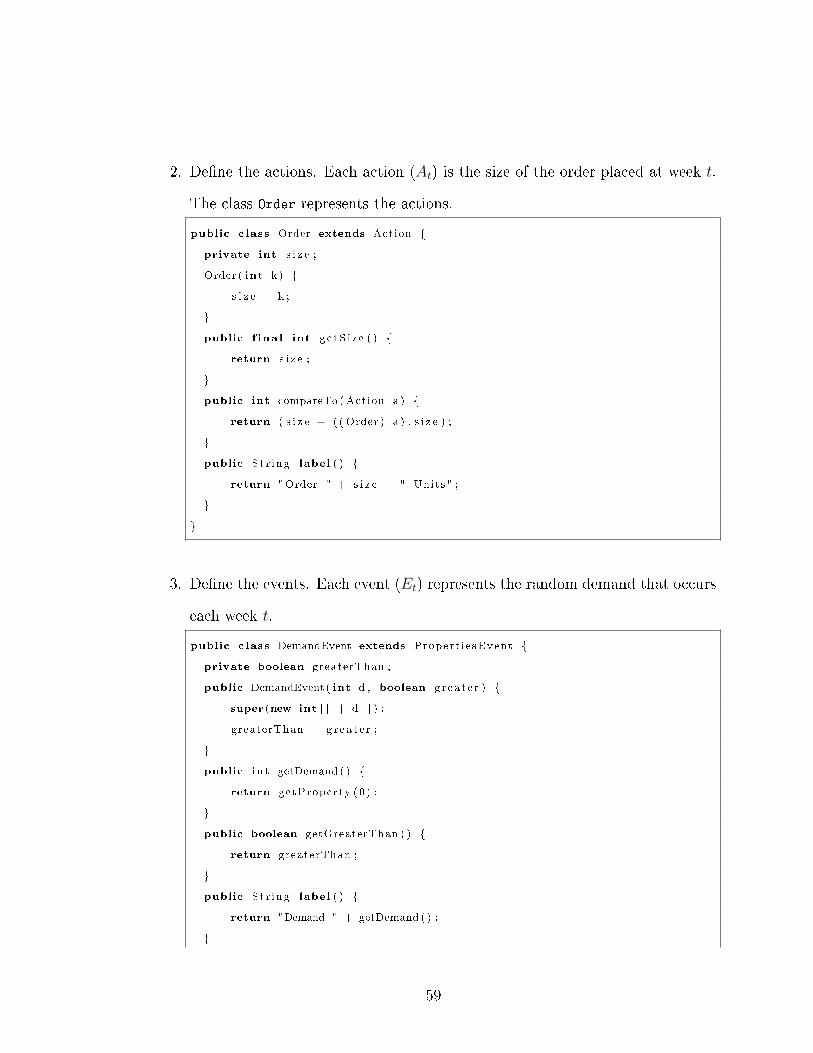
2. De�ne the actions. Each action (At) is the size of the order placed at week t.
The class Order represents the actions.
public class Order extends Action {
private int s i z e ;
Order ( int k ) {
s i z e = k ;
}
public f ina l int g e tS i z e ( ) {
return s i z e ;
}
public int compareTo ( Action a ) {
return ( s i z e − ( ( Order ) a ) . s i z e ) ;
}
public St r ing label ( ) {
return "Order " + s i z e + " Units " ;
}
}
3. De�ne the events. Each event (Et) represents the random demand that occurs
each week t.
public class DemandEvent extends Propert i e sEvent {
private boolean greaterThan ;
public DemandEvent ( int d , boolean g r e a t e r ) {
super (new int [ ] { d }) ;
greaterThan = gr ea t e r ;
}
public int getDemand ( ) {
return getProperty (0 ) ;
}
public boolean getGreaterThan ( ) {
return greaterThan ;
}
public St r ing label ( ) {
return "Demand " + getDemand ( ) ;
}
59

}
4. Select the type of problem. The problem is an in�nite-horizon problem. It is
stochastic and the time is discrete. We will use events; therefore, we should
extend the class DTMDPEv. After extending the class, we need to clarify the
name of the classes that represent the state, action and event in the code. In
our example, InvLevel is the state, Order is the action and DemandEvent is the
event.
public class ControlProduccion extends DTMDPEv<InvLevel , Order , DemandEvent>
{ . . . }
5. De�ne the set of feasible actions from state i. For each state i the feasible
actions that can be taken are those that will not exceed the exhibit hall's
capacity. The maximum order feasible is M − i, so the feasible set of actions
for each state i is A(i) = {0, . . . ,M − i}.
public Actions<Order> f e a s i b l eA c t i o n s ( InvLeve l i ) {
ActionsSet<Order> ac t i onSe t = new ActionsSet<Order >() ; //empty s e t
int max = maxInventory − i . g e tLeve l ( ) ;
for ( int n = 0 ; n <= max ; n++){
ac t i onSe t . add (new Order (n) ) ; //add each f e a s i b l e ac t ion
}
return ac t i onSe t ; // return the s e t
}
6. De�ne the set of active events. For each state i and given that action a is
taken, we de�ne the feasible events that can occur. For example, zero-demand
is active in every state. Demand equal to i + a + B is indistinguishable from
larger demands. So the sets of active events are E(i, a) = {0, . . . , i+ a+B}.
60

public Events<DemandEvent> act iveEvents ( InvLeve l i , Order a ) {
EventsSet<DemandEvent> eventSet = new EventsSet<DemandEvent>() ;
eventSet . add (new DemandEvent ( i . ge tLeve l ( ) + a . g e tS i z e ( ) , true ) ) ;
for ( int n = 0 ; n < i . ge tLeve l ( ) + a . g e tS i z e ( ) ; n++) {
eventSet . add (new DemandEvent (n , fa l se ) ) ;
}
return eventSet ;
}
7. De�ne the set of reachable states from state i, given that action a is taken and
event e occurs. The only reachable state is (i + a − e). The set of reachable
states is S(i, a, e) = {i+ a− e}.
public States<InvLevel> reachab l e ( InvLeve l i , Order a , DemandEvent e ) {
StatesSet<InvLevel> s tSe t = new StatesSet<InvLevel >() ;
i f ( e . getGreaterThan ( ) )
s tS e t . add (new InvLeve l (0 ) ) ; // minimum l e v e l
else
s tS e t . add (new InvLeve l ( i . g e tLeve l ( ) + a . g e tS i z e ( ) − e . getDemand ( ) ) ) ;
return s tS e t ;
}
8. De�ne the transition probabilities for passing between states. When demand
is greater than or equal to i+ a+B, the destinations state is (0), and all are
indistinguishable.
pij(a, e) =
pi+a+B if e < i+ a+B
qi+a+B if e ≥ i+ a+B
public double prob ( InvLeve l i , DemandEvent e ) {
i f ( e . getGreaterThan ( ) )
return demCCDF[ e . getDemand ( ) ] ;
return demPMF[ e . getDemand ( ) ] ;
61
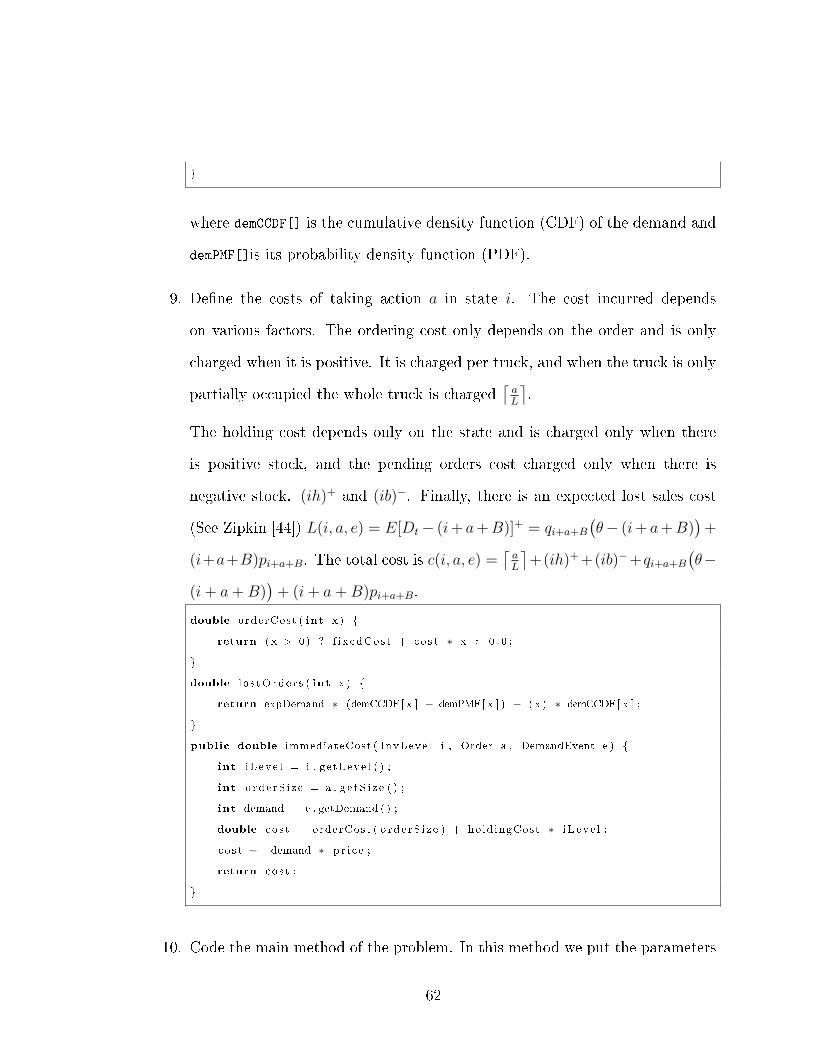
}
where demCCDF[] is the cumulative density function (CDF) of the demand and
demPMF[]is its probability density function (PDF).
9. De�ne the costs of taking action a in state i. The cost incurred depends
on various factors. The ordering cost only depends on the order and is only
charged when it is positive. It is charged per truck, and when the truck is only
partially occupied the whole truck is charged⌈aL
⌉.
The holding cost depends only on the state and is charged only when there
is positive stock, and the pending orders cost charged only when there is
negative stock. (ih)+ and (ib)−. Finally, there is an expected lost sales cost
(See Zipkin [44]) L(i, a, e) = E[Dt− (i+ a+B)]+ = qi+a+B(θ− (i+ a+B)
)+
(i+a+B)pi+a+B. The total cost is c(i, a, e) =⌈aL
⌉+(ih)++(ib)−+qi+a+B
(θ−
(i+ a+B))+ (i+ a+B)pi+a+B.
double orderCost ( int x ) {
return ( x > 0) ? f ixedCost + cos t ∗ x : 0 . 0 ;
}
double l o s tOrde r s ( int x ) {
return expDemand ∗ (demCCDF[ x ] − demPMF[ x ] ) − ( x ) ∗ demCCDF[ x ] ;
}
public double immediateCost ( InvLeve l i , Order a , DemandEvent e ) {
int i L ev e l = i . ge tLeve l ( ) ;
int o rde rS i z e = a . g e tS i z e ( ) ;
int demand = e . getDemand ( ) ;
double co s t = orderCost ( o rd e rS i z e ) + hold ingCost ∗ i L ev e l ;
c o s t −= demand ∗ p r i c e ;
return co s t ;
}
10. Code the main method of the problem. In this method we put the parameters
62
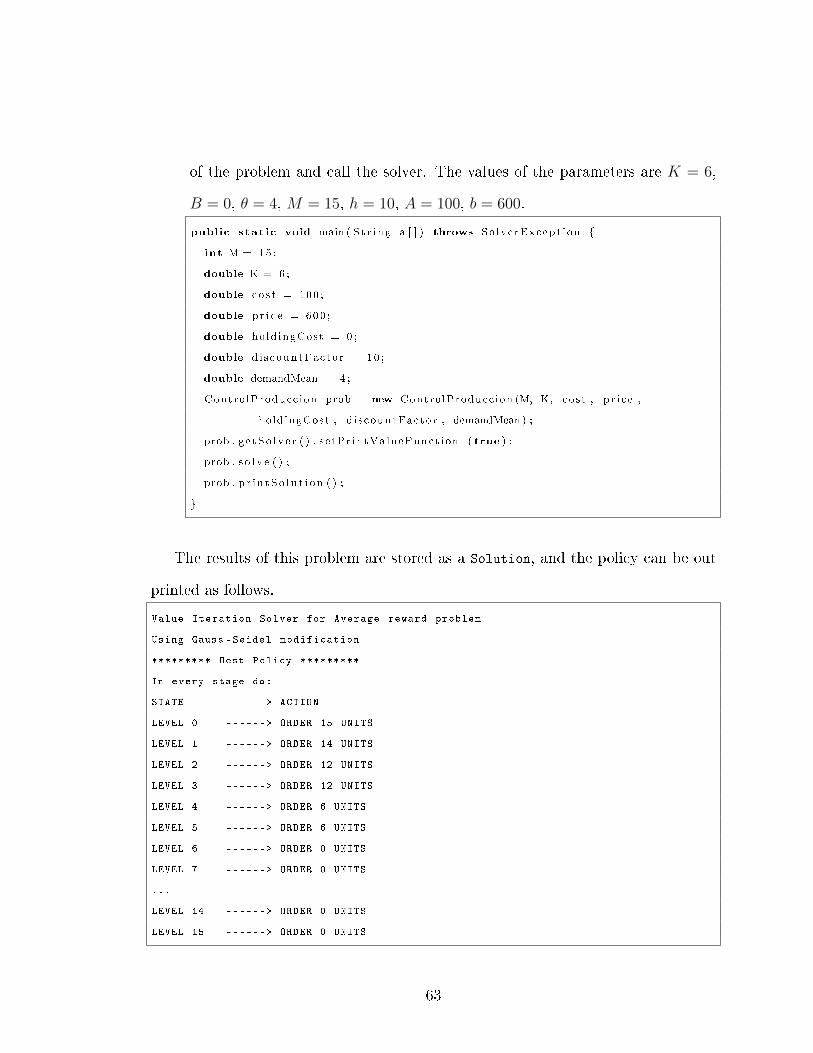
of the problem and call the solver. The values of the parameters are K = 6,
B = 0, θ = 4, M = 15, h = 10, A = 100, b = 600.
public stat ic void main ( St r ing a [ ] ) throws SolverExcept ion {
int M = 15 ;
double K = 6 ;
double co s t = 100 ;
double p r i c e = 600 ;
double hold ingCost = 0 ;
double di scountFactor = 10 ;
double demandMean = 4 ;
ControlProduccion prob = new ControlProduccion (M, K, cost , p r i c e ,
holdingCost , d i scountFactor , demandMean) ;
prob . g e tSo l v e r ( ) . se tPr intValueFunct ion ( true ) ;
prob . s o l v e ( ) ;
prob . p r i n tSo l u t i on ( ) ;
}
The results of this problem are stored as a Solution, and the policy can be out
printed as follows.
Value Iteration Solver for Average reward problem
Using Gauss -Seidel modification
********* Best Policy *********
In every stage do:
STATE ------> ACTION
LEVEL 0 ------> ORDER 15 UNITS
LEVEL 1 ------> ORDER 14 UNITS
LEVEL 2 ------> ORDER 12 UNITS
LEVEL 3 ------> ORDER 12 UNITS
LEVEL 4 ------> ORDER 6 UNITS
LEVEL 5 ------> ORDER 6 UNITS
LEVEL 6 ------> ORDER 0 UNITS
LEVEL 7 ------> ORDER 0 UNITS
...
LEVEL 14 ------> ORDER 0 UNITS
LEVEL 15 ------> ORDER 0 UNITS
63

Chapter V
Applications in Real Life Problems
In this section we will enumerate some of the work done with the jMarkov software
by di�erent students for their thesis projects, giving only a very brief summary of
their work. We also provide references for interested readers who want to �nd out
more about these projects.
• Blocking models on inventory analysis: The author studied an order picking
system. One of the biggest problems in those systems was the blocking in
the trajectory of the workers while picking the products. The workers' idle
time was translated in delivery delays and additional expenses. The idea
of the project was to minimize this idle time using jMakov and simulation
techniques [49].
• A dynamic programming model for structuring mortgage-backed securities:
The project was based on the structure of the Colombian mortgage securities
issued in the Colombian stock market. The author used dynamic program-
ming for restructuring the securities, lowering their issued cost through the
minimization of the future payments to the bondholders. This paper won the
best paper award in the IEEE SIEDS 2005 [50].
64

• Implementation of the shortest path: the project intended to built a generic
algorithm to solve stochastic shortest-path problems using the jMarkov soft-
ware [51].
• A parallel partitioned e�cient-value iteration: The idea of the project was
to create an extension of the jMarkov software, explicitly in the jMDP pack-
age. The author achieved more e�cient results while running the solution
algorithms by using clusters of computers for the calculations [52].
• Linear programming solvers for Markov decision processes: The project con-
nected the jMarkov software to some of the most commercial linear program-
ming optimization software's. The author gave more �exibility to the jMarkov
software so the users could solve Markov decision process through linear pro-
gramming [53].
65
Chapter VI
Conclusions
The jMarkov package was coded with the objective of creating a user-friendly envi-
ronment. We concentrated all our e�orts to create a software program that allows
the user to model any kind of system, like an Markov chain, a QBD or an MDP,
with fairly basic knowledge of programming. To this end, we separated the modeling
part from the solution algorithms. Therefore, the user only needs to mathematically
model the problem as explained in the previous sections and the software will solve
the problem.
Although jMarkov is a user-friendly software, the existing documentation ex-
plaining how it works is not. Any kind of software needs explanatory documentation
to explain it, which must be written for every type of reader. This is the reason we
present a user manual that explains the basic principles for modeling with jMarkov.
The user manual is divided into three sections, namely: programming knowledge,
structure description and modeling process. The programming knowledge section
gives the basic programming components needed to understand and model with
jMarkov. We de�ne the abstraction capabilities of Java.
In the structure description we explain the main components of the software that
the user must know about. These include the basic elements package, the jMarkov
66

package, the jQBD package, the jPhase package and the jMDP package. The �rst
collects all the basic components a stochastic problem should have and which are
essential for its modeling; here we have a class that represents a state or an event.
The other ones are used to model Markov chains, quasi-birth-death processes, phase-
type distributions and Markov decision processes, respectively. They have all the
classes that represent every type of problem we have discussed previously in the
document. Those classes are the ones in charge of modeling the system based on
what the user codes.
In this part we successfully decrease the number of classes the user must work
with in each component. The basic elements package contains 24 classes, but we
determine that only 6 are important. jMarkov and jQBD have 6 classes, narrowed
down to 2. jPhase has 18 classes, but only 4 are essential. Finally, jMDP has 13
classes, of which 8 are important.
We explain the modeling process for stochastic problems in our software by using
practical examples and giving a list of real-life problems that have been solved using
jMarkov to show the full capacity of the software. In conclusion, we have created a
user-friendly manual that any type of person can use to learn to work with jMarkov,
making the software an easy-to use tool.
67

References
[1] Java Developers Site, Sun Microsystems. http://sun.java.com
[2] A. Riska and E. Smirni. MAMSolver: A matrix analytic methods tool. In Pro-
ceedings of the 12-th international conference on modeling Techniques and tools
for computer and communication system performance evaluation tools, pages
205-211, April 2002.
[3] B. R. Haverkort, A. P. van Moorsel, and A. Dijkstra. MGMtool: A performance
modelling tool based on matrix geometric techniques. In R. Pooley and J. Hill-
ston, editors, Computer performance evaluation '92, modelling techniques and
tools, pages 397-401. Antony Rowe Ltd., 1992.
[4] S. Li, S. Park, and D. Ari�er. SMAQ: Ameasurement-based tool for tra�c
modeling and queuing analysis Part I: Design methodologies and software ar-
chitecture. IEEE Communications Magazine, 36:56-65, August 1998.
[5] D. Potier and M. Veran. QNAP2: A portable environment for queueing sys-
tems modelling. In Modelling and Tools for Performance Analysis. Proceedings
of the First International Conference on Modelling Techniques and Tools for
Computer Performance Evaluation, 1984.
68

[6] W. J. Stewart. Introduction to the Numerical Solution of Markov Chains, vol-
ume First edition. Princeton University Press, 1994.
[7] O.J. Dahl and K. Nygaard. SIMULA - an ALGOL-based simulation language.
Communications of the ACM, 9(9):671-678, September 1966.
[8] William J. Stewart. MARCA: Markov chain analyzer, a software package for
markov modelling. Technical report, North Carolina State University - Depart-
ment of Computer Science, 1996.
[9] G. Ciardo, R. Jones, A. Miner, and R. Siminiceanu. SMART: Stochastic Model-
checking Analyzer for Reliability and Timing. In Proceedings of the Interna-
tional Conference on Dependable Systems and Networks (DSN'02), 2002.
[10] Christel Baier, Frank Ciesinski, and Marcus Groÿer. PROBMELA: a modeling
language for communicating probabilistic processes. University at Bonn,Institut
for Informatik I, Germany,.
[11] W. Knottenbelt. Generalised markovian analysis of timed transitions systems.
Master's thesis, Department of Computer Science, Faculty of Science, Univer-
sity of Cape Town, June 1996.
[12] Alan Dormer, Alkis Vazacopoulos, Nitin Verma, and Horia Tipi. Modeling and
solving stochastic programming problems in supply chain management using
Xpress-SP. Dash Optimization, Inc.
[13] AMPL. Stochastic programming extensions proposed new AMPL features.
Technical report, AMPL http://www.ampl.com/NEW/FUTURE/stoch.html,
August1996
69

[14] Patrick Valente. SAMPL/SPInE user's manual. Technical report, OptiRisk Sys-
tems, Middlesex, United Kingdom, 2002.
[15] Yih-Long Chang and Kiran Desai. WinQSB, Version 2.0. John Wiley and Sons,
2003.
[16] Bernard Lamond. An interactive computer program for markov dynamic pro-
gramming. Technical report, Universite Laval Department doperations et sys-
temes de decision, October 1984.
[17] Markov Decision Processes (MDP) Toolbox http://www.inra.fr/internet/
Departements/MIA/T//MDPtoolbox/
[18] Poupart, Pascal. Symbolic Perseus. http://www.cs.uwaterloo.ca/
~ppoupart/
[19] Smith, Trey. ZMDP Software for POMDP and MDP Planning. http://www.
cs.cmu.edu/~trey/zmdp/
[20] Cassandra, Anthony. POMDP solver software. http://www.cs.brown.edu/
research/ai/pomdp/
[21] Spaan, Matthijs. Perseus. http://staff.science.uva.nl/~mtjspaan/
software/approx/
[22] Taha, Tarek. POMDP Tools. http://www.tarektaha.com/research/
download.php?list.3
[23] Caylus open source library for MDP. http://sourceforge.net/projects/
caylus/
70

[24] Trivedi, Kishor S. SHARPE (Symbolic Hierarchical Automated Reliability and
Performance Evaluator). http://people.ee.duke.edu/~kst/
[25] W. Winston. Introducción to Probability Models. Brooks/Cole. 2004.
[26] V. Kulkarni. Modeling and analysis of stochastic systems. Chapman and Hall.,
1995.
[27] G. Latouche and V. Ramaswami. Introduction to matrix analytic methods in
stochastic modeling. Society for Industrial and Applied Mathematics (SIAM),
Philadelphia, PA, 1999.
[28] M. F. Neuts. Matrix-geometrix solutions in stochastic models. The John Hop-
kins University Press, 1981.
[29] M. F. Neuts. Matrix-geometrix solutions in stochastic models. The John Hop-
kins University Press, 1981.
[30] G. Riaño. Transient behavior of stochastic networks: application to produc-
tion planning with load dependent lead times. PhD thesis, Georgia Institute of
Technology, 2002.
[31] M. F. Neuts. Two further closure properties of PH-distributions. Asia-Paci�c
J. Oper. Res., 9(1):77-85, 1992.
[32] A. Lang and J. Arthur. Parameter approximation for Phase-Type distributions.
In S. Chakravarty, editor, Matrix Analytic methods in Stochastis Models. Mar-
cel Dekker, Inc., 1996.
[33] S. Asmussen, O. Nerman, and M. Olsson. Fitting Phase Type distributions via
the EM algorithm. Scandinavian Journal of Statistics, 23:419,441, 1996.
71
[34] R. Khayari, R. Sadre, and B. Haverkort. Fitting worldwide web request traces
with the EM-algorithm. Performance Evaluation, 52:175-191, 2003.
[35] A. Thümmler, P. Buchholz, and M. Telek. A novel approach for �tting prob-
ability distributions to real trace data with the EM algorithm. In Proceedings
of the International Conference on Dependable Systems and Networks, 2005.
[36] M. Telek and A. Heindl. Matching moments for acyclic discrete and continuous
Phase-Type distributions of second order. I.J. of Simulation, 3(3-4):47-57, 2002.
[37] T. Osogami and M. Harchol. Closed form solutions for mapping general dis-
tributions to quasi-minimal PH distributions. Performance Evaluation, 63:524-
552, 2006.
[38] A. Bobbio, A. Horvath, and M. Telek. Matching three moments with minimal
acyclic Phase Type distributions. Stochastic Models, 21:303-326, 2005.
[39] Martin Puterman. Markov decision processes: discrete stochastic dynamic pro-
gramming. John Wiley and Sons, New York, 1994.
[40] Dimitri Bertsekas. Dynamic Programming and Optimal Control. Athena Sci-
enti?c, Belmont, Massachusetts, 1995.
[41] Raphen Becker, Shlomo Zilberstein, and Victor Lesser. Decentralized markov
decision processes with event-driven interactions. In Autonomous Agents and
multi Agent Systems, New your, New Your, USA, July 2004.
[42] Sridhar Mahadevan, Nikfar Khaleeli, and Nicholas Marchalleck. Designing
agent controllers using discrete-event markov models. Department of Computer
Science, Michigan State University.
72

[43] Eugene A. Feinberg. Continuous time discounted jump markov decision pro-
cesses: A discrete-event approach. Mathematics of Operations Research,
29(3):492-524, August 2004.
[44] Paul Herbert Zipkin. Foundations of Inventory Management. Management and
Organization Series. McGraw-Hill International Editions, 2000.
[45] G. Riaño and J. Góez. jMarkov user's guide. Industrial Engineering, Universi-
dad de los Andes, 2005.
[46] G. Ciardo. Tools for formulating Markov models. In W. K. Grassman, edi-
tor, Computational Probability. Kluwer's International Series in Operations
Research and Management Science, Massachusetts, USA, 2000.
[47] J. F. Pérez and G. Riaño. jPhase: an object oriented tool for modeling Phase-
Type distributions. In Proceedings of the SMCtools'06, October 2006. Pisa,
Italy.
[48] G. Riaño and A. Sarmiento. jMDP: an object-oriented framework for modeling
MDPs. Universidad de los Andes, 2006.
[49] G. Riaño, D. Silva and C. Amaya. Desarrollo y validacion computacional de
modelos de bloqueo en order - picking - systems. Industrial Engineering, Uni-
versidad de los Andes, 2008.
[50] G. Riaño, J. Medina and J. Villareal. A Dynamic Programming Model for
Structuring Mortgage Backed Securities. Industrial Engineering, Universidad de
los Andes, 2005. http://www.sys.virginia.edu/sieds07/papers/SIEDS07_
0026_FI.pdf
73
[51] G. Riaño and J. Redondo. Implementacion generica para problemas de ruta
mas corta estocastica. Industrial Engineering, Universidad de los Andes, 2005.
[52] G. Riaño and I. Rey. A parallel partitioned e�cient value iteration implemen-
tation for jMDP. Industrial Engineering, Universidad de los Andes, 2008.
[53] G. Riaño and D. Bello. Linear Programming solvers for Markov Decision Pro-
cesses. Industrial Engineering, Universidad de los Andes, 2006. http://www.
sys.virginia.edu/sieds06/papers/FMorningSession5.1.pdf
74