aa203 optimal and learning-based controlasl.stanford.edu/aa203/pdfs/lecture/lecture_1.pdf · course...
TRANSCRIPT
AA203Optimal and Learning-based Control
Course overview, nonlinear optimization

Course mechanics
Teaching team:• Instructor: Marco Pavone• CAs: James Harrison and Jonathan Lacotte• Collaborators: Riccardo Bonalli (Stanford) and Roberto Calandra (FAIR)
Logistics:• Class info, lectures, and homework assignments on class web page:
http://asl.stanford.edu/aa203/• Forum: https://piazza.com/
4/1/19 AA 203 | Lecture 1 2
Course requirements
• Weekly homework, due Wednesday• Midterm exam (05/02)• Final project (more details later)• Grading:• homework 30% • midterm 30%• final project 35%• grading quality 5%
4/1/19 AA 203 | Lecture 1 3
Prerequisites
• Strong familiarity with calculus (e.g., CME100)• Strong familiarity with linear algebra (e.g., EE263 or CME200)
4/1/19 AA 203 | Lecture 1 4
Outline
1. Problem formulation and course goals
2. Non-linear optimization
3. Computational methods
4/1/19 AA 203 | Lecture 1 5
Outline
1. Problem formulation and course goals
2. Non-linear optimization
3. Computational methods
4/1/19 AA 203 | Lecture 1 6
Problem formulation
• Mathematical description of the system to be controlled• Statement of the constraints• Specification of a performance criterion
4/1/19 AA 203 | Lecture 1 7
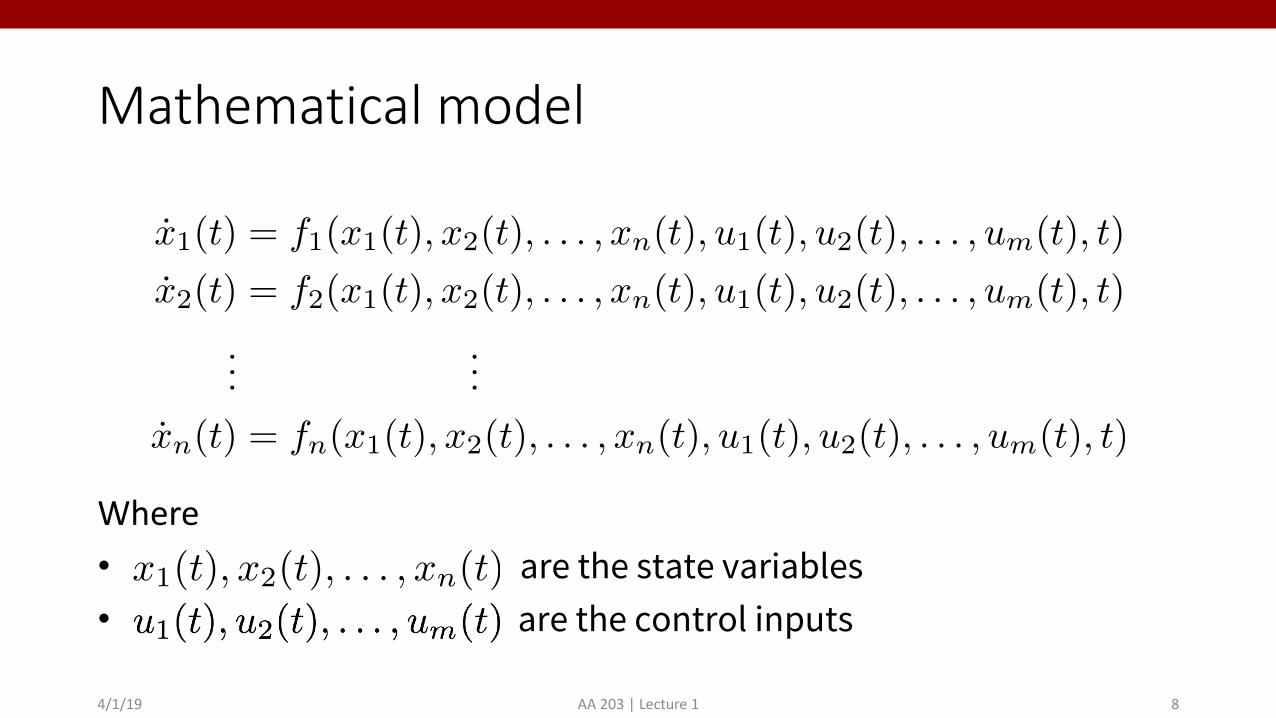
Mathematical model
Where• are the state variables• are the control inputs
4/1/19 AA 203 | Lecture 1 8
x1(t) = f1(x1(t), x2(t), . . . , xn(t), u1(t), u2(t), . . . , um(t), t)
x2(t) = f2(x1(t), x2(t), . . . , xn(t), u1(t), u2(t), . . . , um(t), t)
......
xn(t) = fn(x1(t), x2(t), . . . , xn(t), u1(t), u2(t), . . . , um(t), t)
x1(t), x2(t), . . . , xn(t)
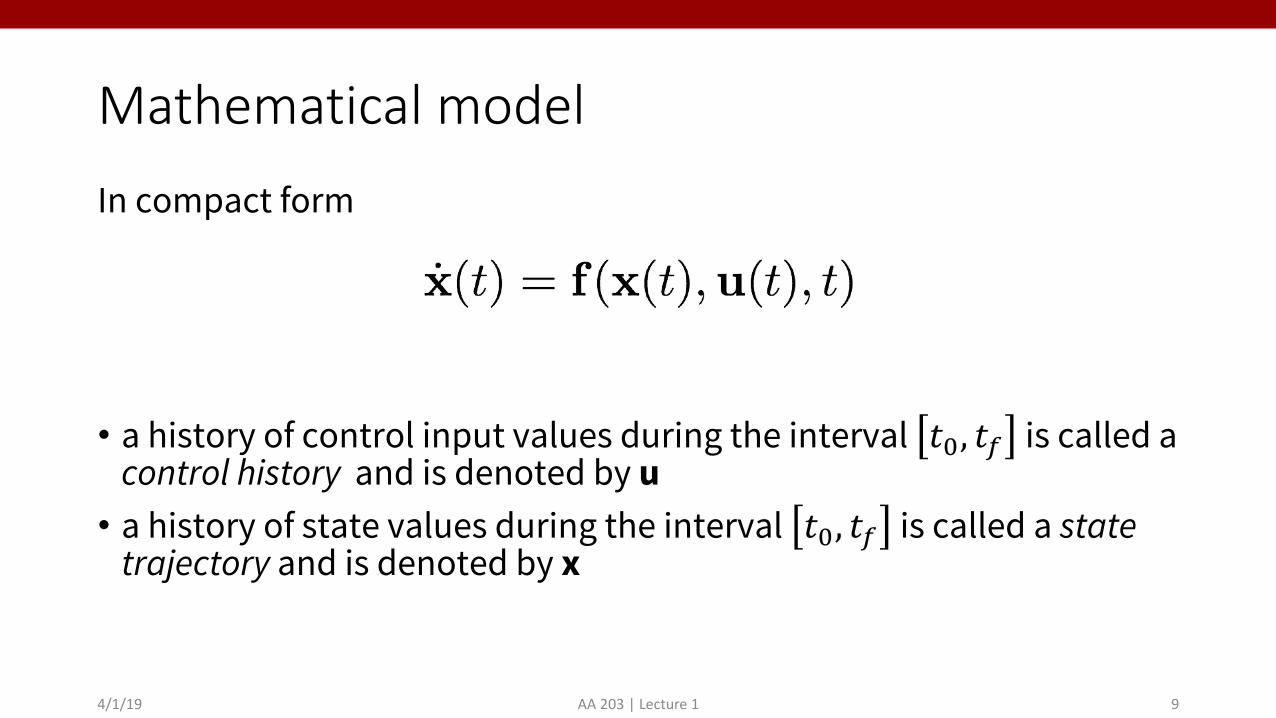
Mathematical model
• a history of control input values during the interval !", !$ is called a control history and is denoted by u• a history of state values during the interval !", !$ is called a state
trajectory and is denoted by x
4/1/19 AA 203 | Lecture 1 9
In compact form
Constraints
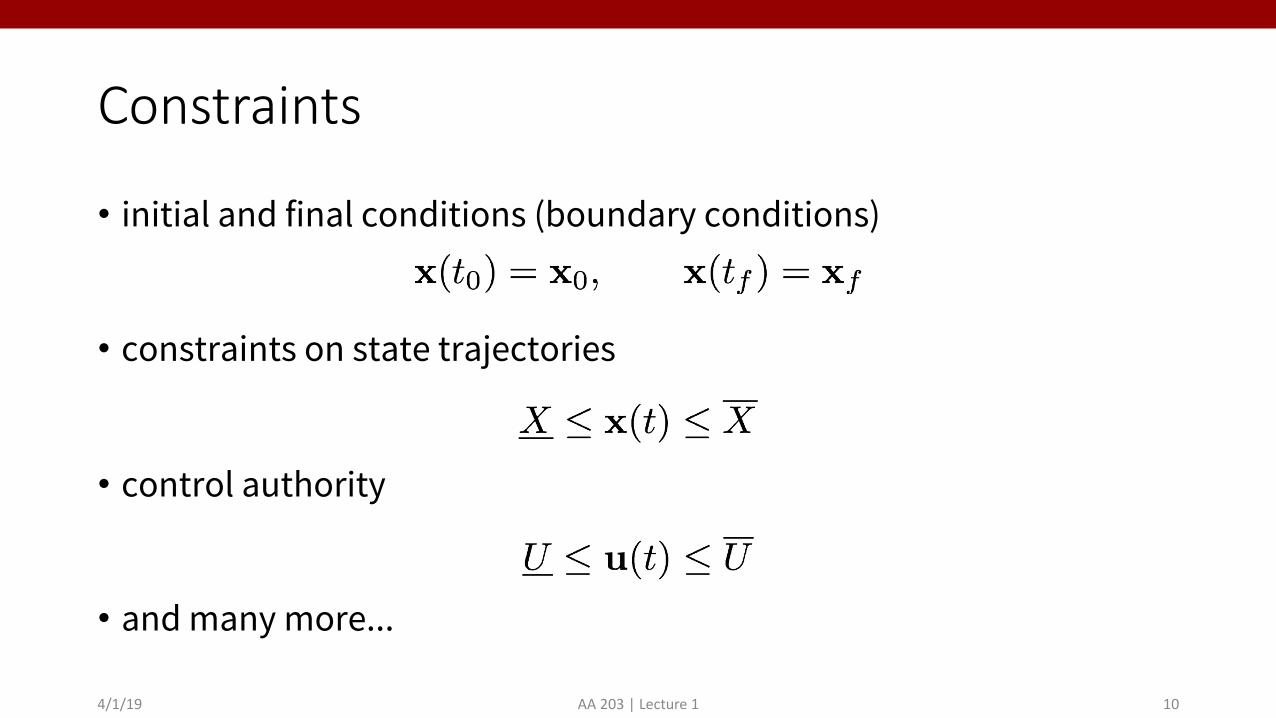
• initial and final conditions (boundary conditions)
• constraints on state trajectories
• control authority
• and many more...
4/1/19 AA 203 | Lecture 1 10

Constraints
• A control history which satisfies the control constraints during the entire time interval !", !$ is called an admissible control • A state trajectory which satisfies the state variable constraints
during the entire time interval !", !$ is called an admissible trajectory
4/1/19 AA 203 | Lecture 1 11

Performance measure
• ℎ and " are scalar functions• #$ may be specified or free
4/1/19 AA 203 | Lecture 1 12
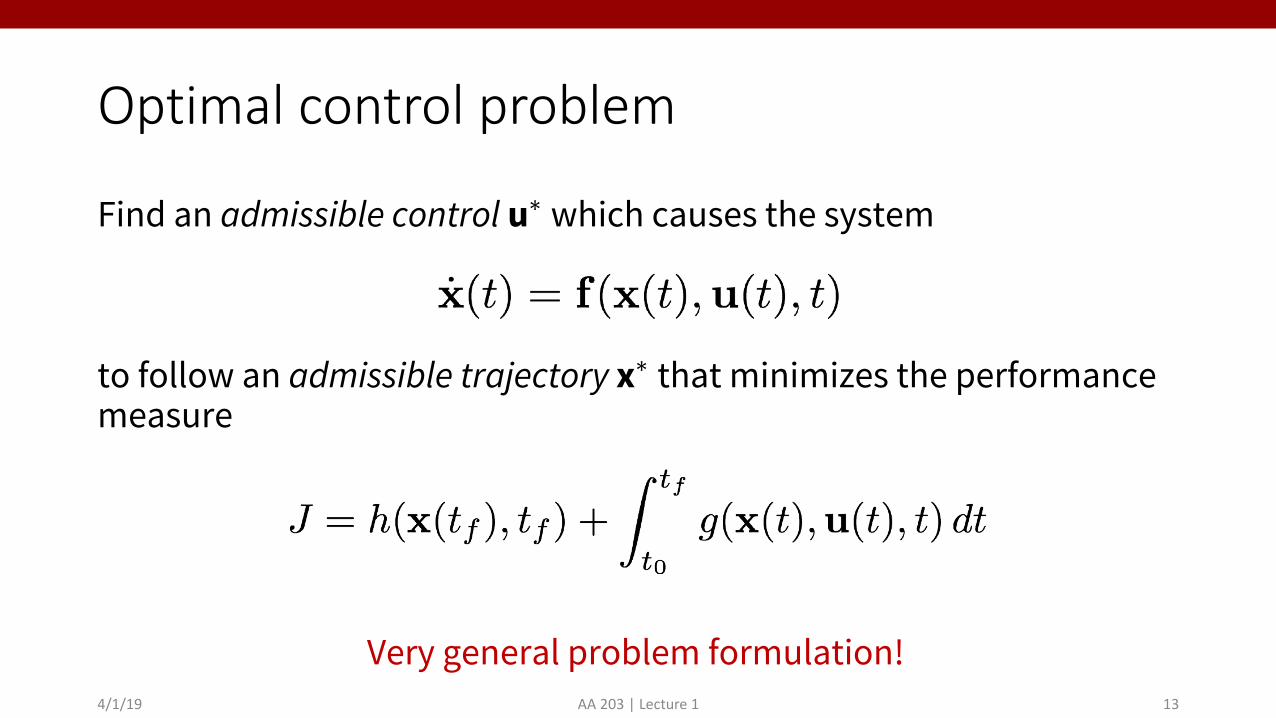
Optimal control problem
Find an admissible control u∗ which causes the system
to follow an admissible trajectory x∗ that minimizes the performance measure
4/1/19 AA 203 | Lecture 1 13
Very general problem formulation!
Optimal control problem
Comments:• minimizer (u∗, $∗) called optimal trajectory-control pair• existence: in general, not guaranteed• uniqueness: optimal control may not be unique• minimality: we are seeking a global minimum• for maximization, we rewrite the problem as minu −+
4/1/19 AA 203 | Lecture 1 14
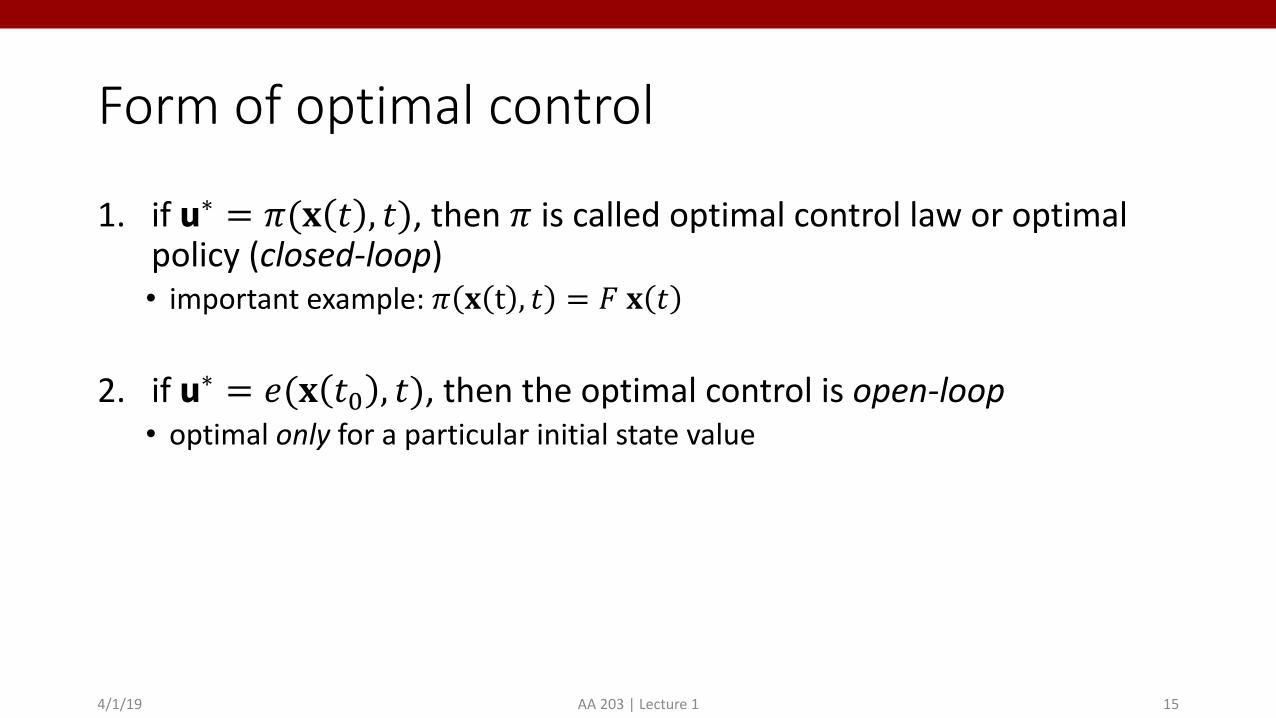
Form of optimal control
1. if u∗ = #(% & , &), then # is called optimal control law or optimal policy (closed-loop)• important example: # % t , & = * % &
2. if u∗ = +(% &, , &), then the optimal control is open-loop• optimal only for a particular initial state value
4/1/19 AA 203 | Lecture 1 15
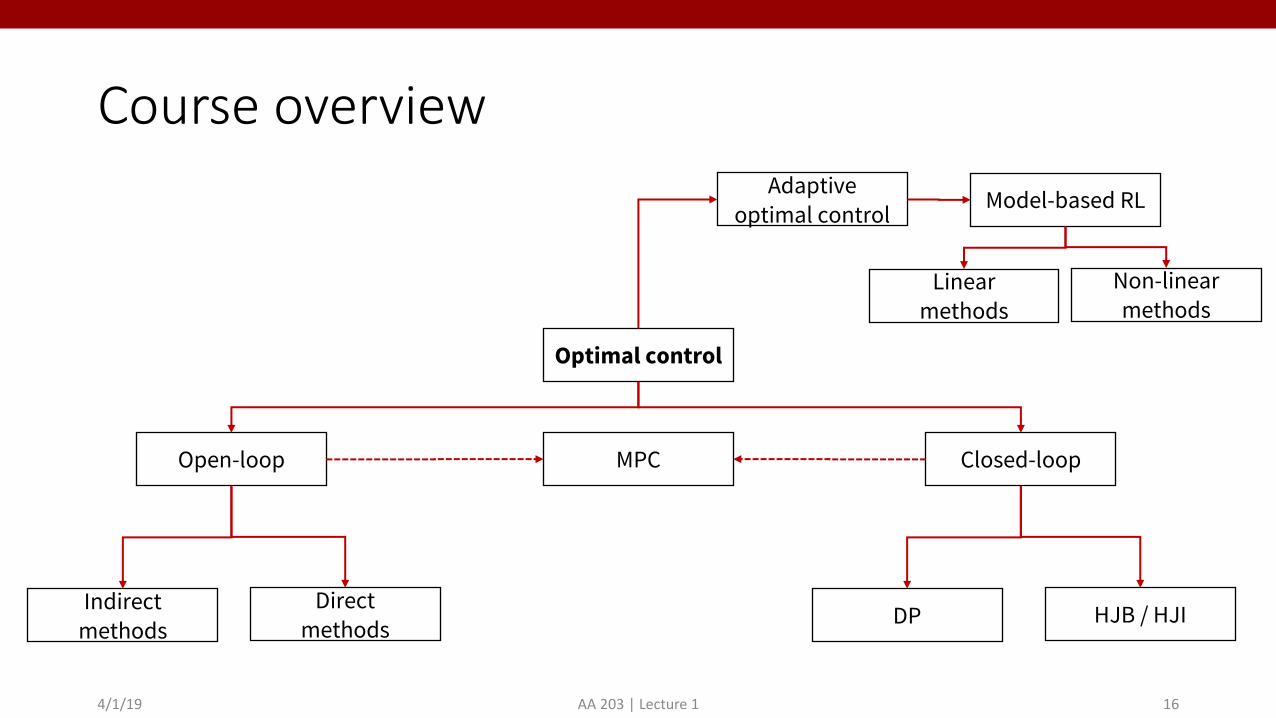
Course overview
4/1/19 AA 203 | Lecture 1 16
Optimal control
Open-loop
Indirect methods
Direct methods
Closed-loop
DP HJB / HJI
MPC
Adaptiveoptimal control Model-based RL
Linear methods
Non-linear methods
Course goals
To learn the theoretical and implementation aspects of main techniques in optimal control and model-based reinforcement learning
AA 203 | Lecture 1 174/1/19

Outline
1. Problem formulation and course goals
2. Non-linear optimization
3. Computational methods
4/1/19 AA 203 | Lecture 1 18
Non-linear optimization
Unconstrained non-linear program
• ! usually assumed continuously differentiable (and often twice continuously differentiable)
4/1/19 AA 203 | Lecture 1 19
Local and global minima
• A vector !∗ is said an unconstrained localminimum if ∃$ > 0 such that
• A vector !∗ is said an unconstrained globalminimum if
• !∗ is a strict local/global minimum if the inequality is strict
4/1/19 AA 203 | Lecture 1 20
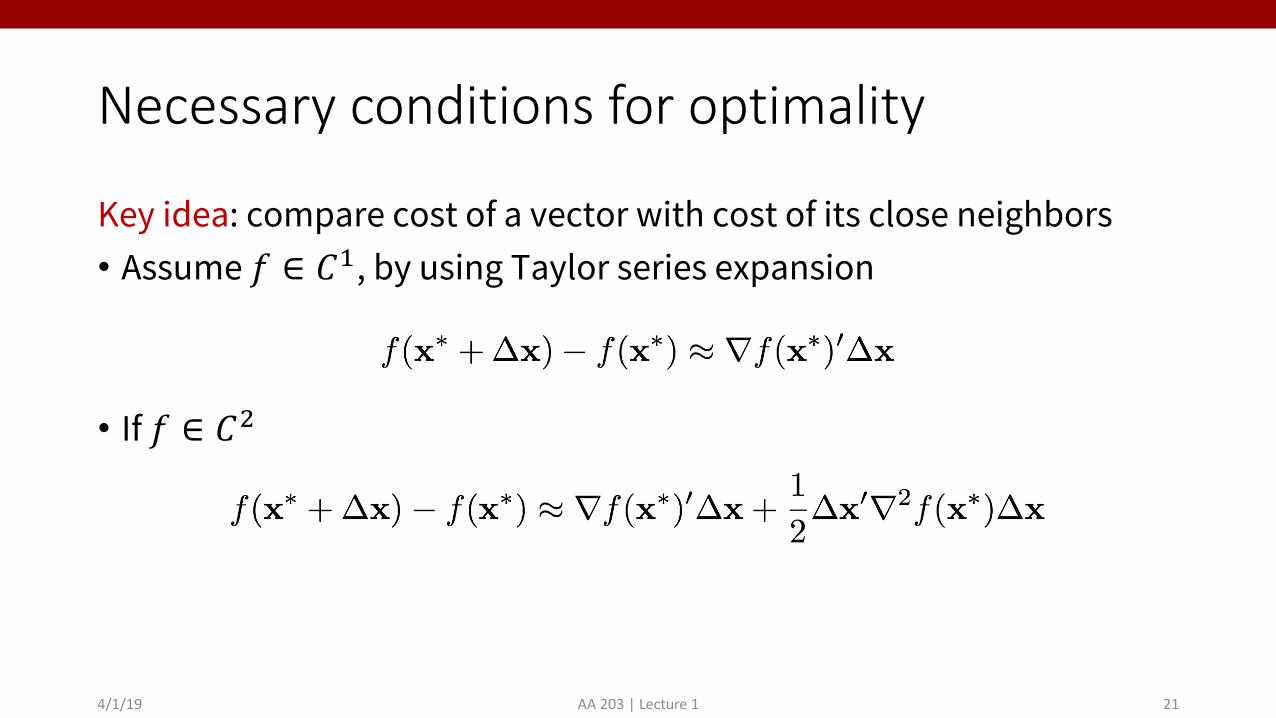
Necessary conditions for optimality
Key idea: compare cost of a vector with cost of its close neighbors• Assume ! ∈ #$, by using Taylor series expansion
• If ! ∈ #%
4/1/19 AA 203 | Lecture 1 21
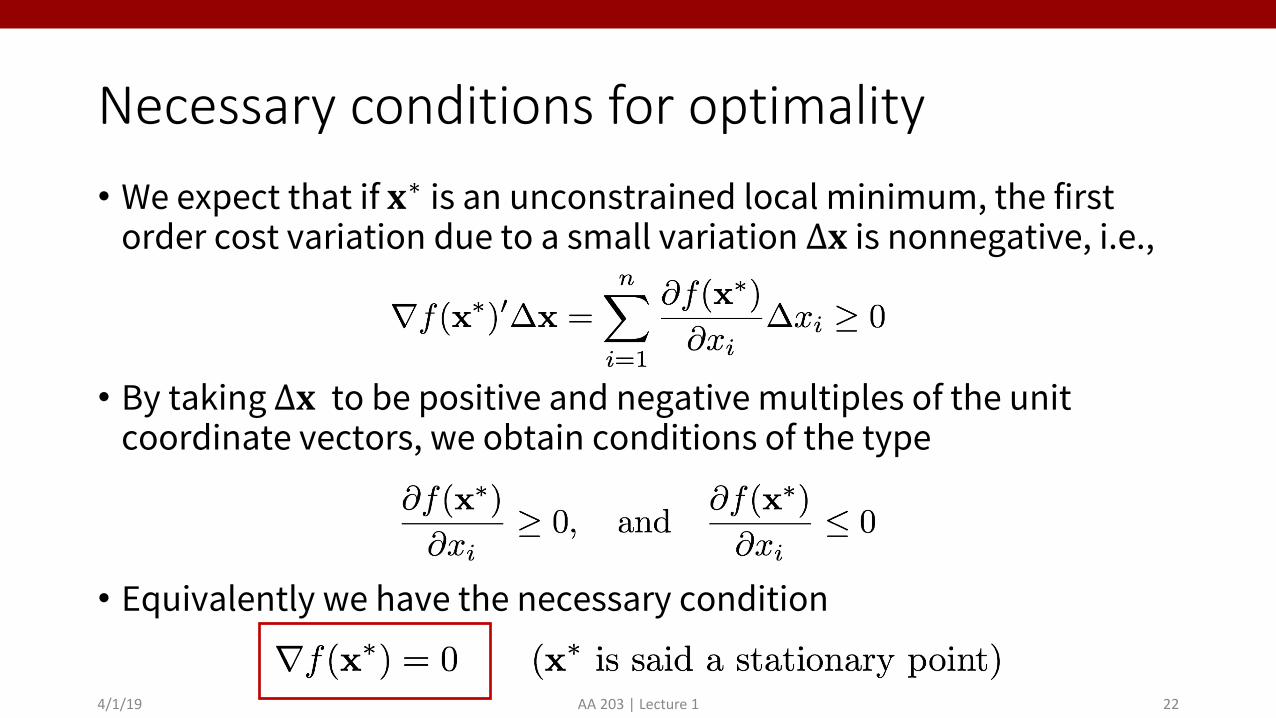
Necessary conditions for optimality• We expect that if !∗ is an unconstrained local minimum, the first
order cost variation due to a small variation Δ! is nonnegative, i.e.,
• By taking Δ! to be positive and negative multiples of the unit coordinate vectors, we obtain conditions of the type
• Equivalently we have the necessary condition
4/1/19 AA 203 | Lecture 1 22
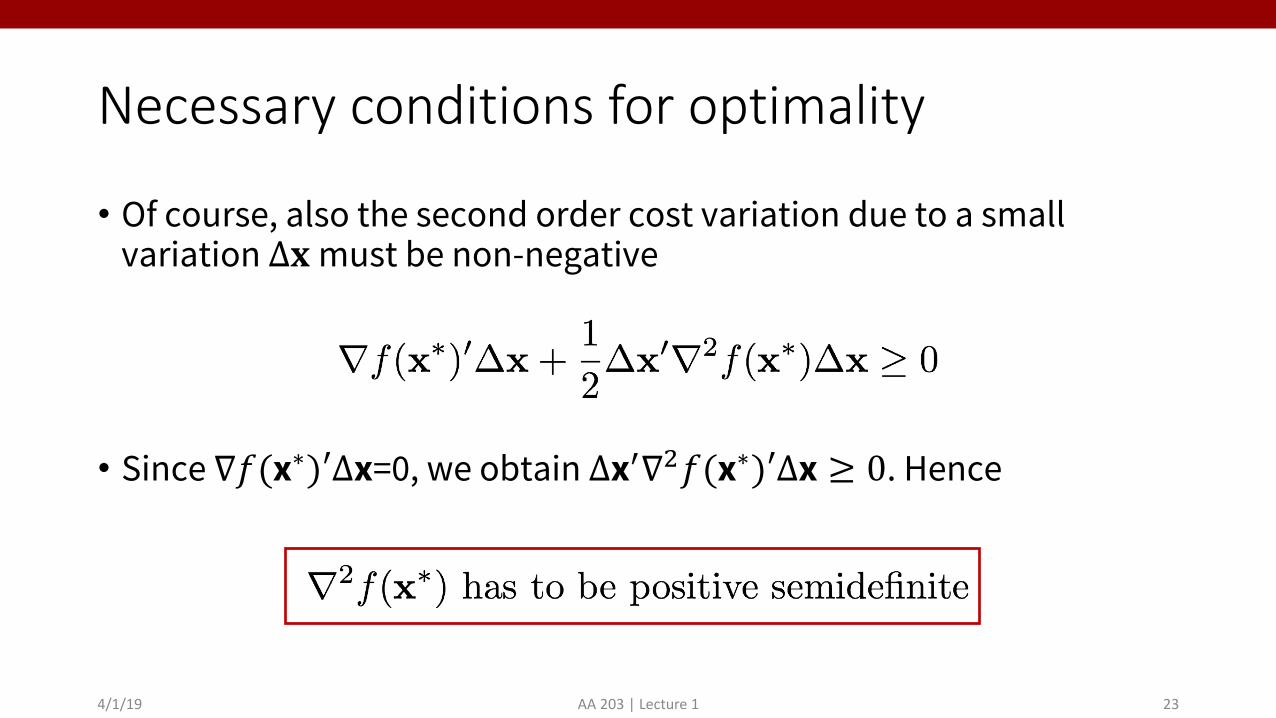
Necessary conditions for optimality
• Of course, also the second order cost variation due to a small variation Δ" must be non-negative
• Since ∇$(x∗)′∆x=0, we obtain ∆x*∇+$(x∗)′∆x ≥ 0. Hence
4/1/19 AA 203 | Lecture 1 23

NOC – formal
Theorem: NOC Let !∗be an unconstrained local minimum of #:ℝ& ↦ℝ and assume that # is () in an open set * containing !∗. Then
If in addition # ∈ (, within *,
4/1/19 AA 203 | Lecture 1 24
(first order NOC)
positive semidefinite (second order NOC)
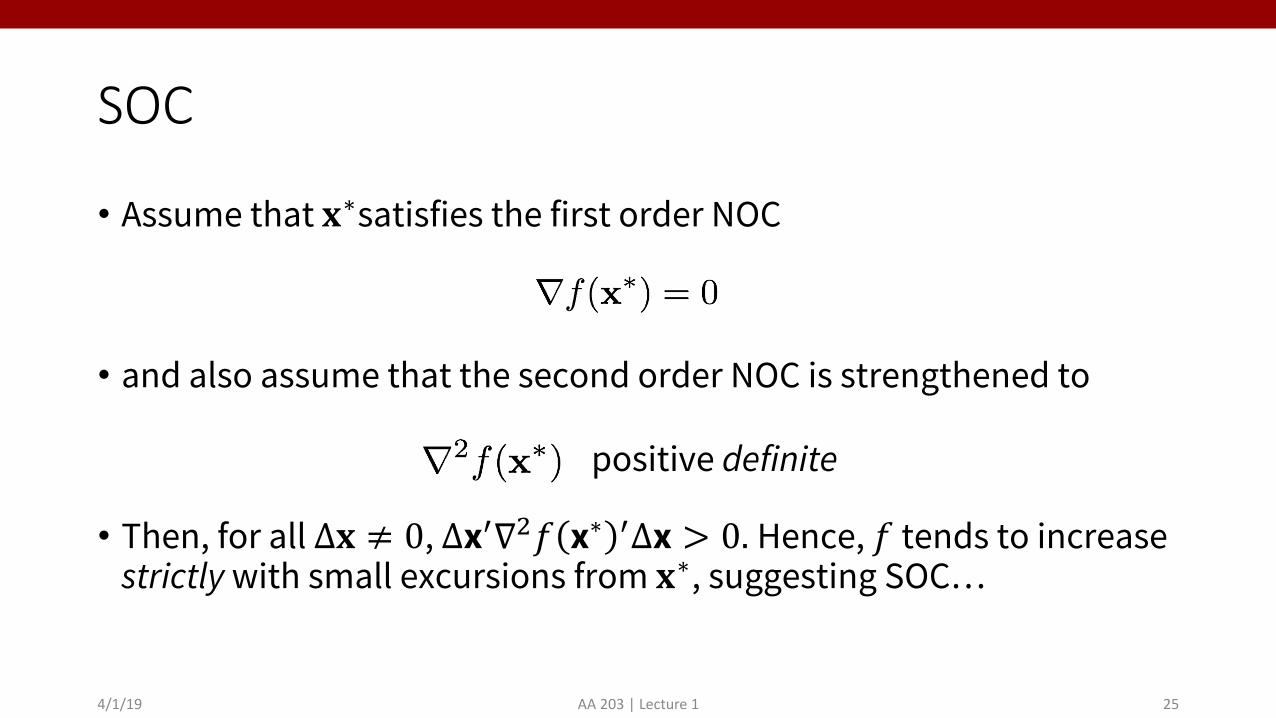
SOC
• Assume that !∗satisfies the first order NOC
• and also assume that the second order NOC is strengthened to
• Then, for all Δ! ≠ 0, ∆x'∇)* x∗ '∆x > 0. Hence, * tends to increase strictlywith small excursions from !∗, suggesting SOC…
4/1/19 AA 203 | Lecture 1 25
positive definite
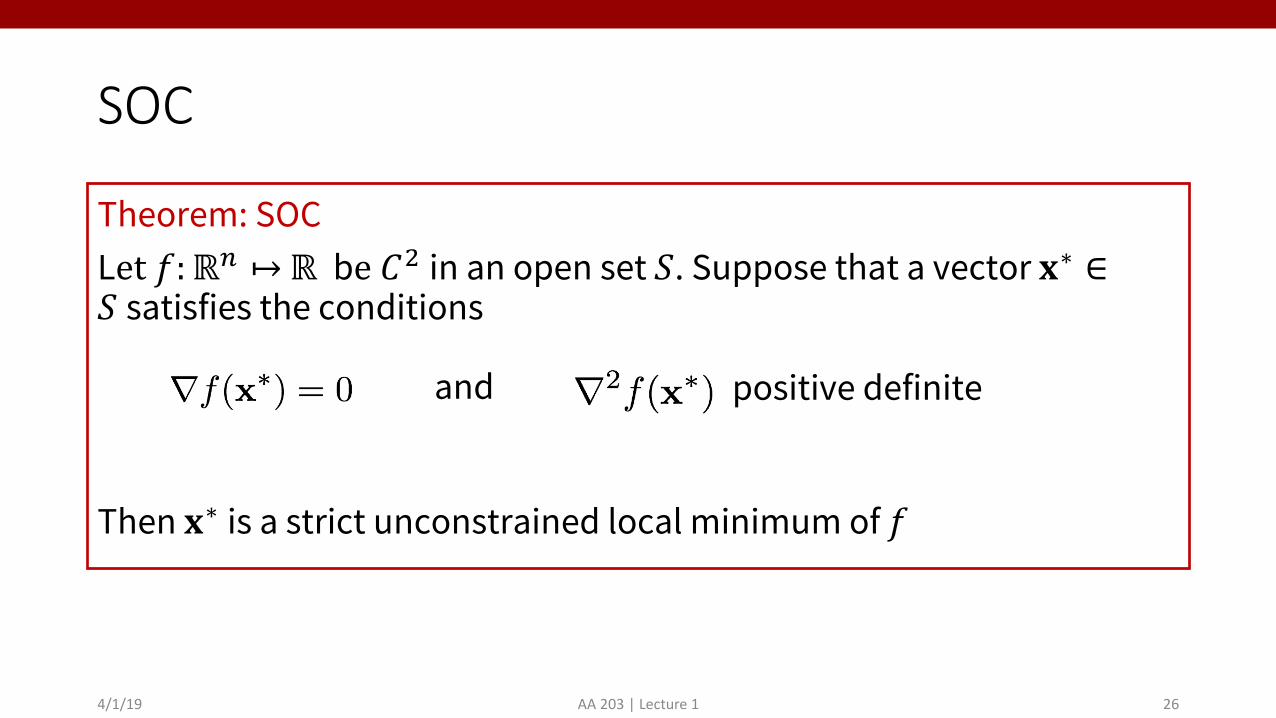
SOC
4/1/19 AA 203 | Lecture 1 26
Theorem: SOC Let #:ℝ& ↦ℝ be () in an open set *. Suppose that a vector +∗ ∈* satisfies the conditions
Then +∗ is a strict unconstrained local minimum of #
and positive definite
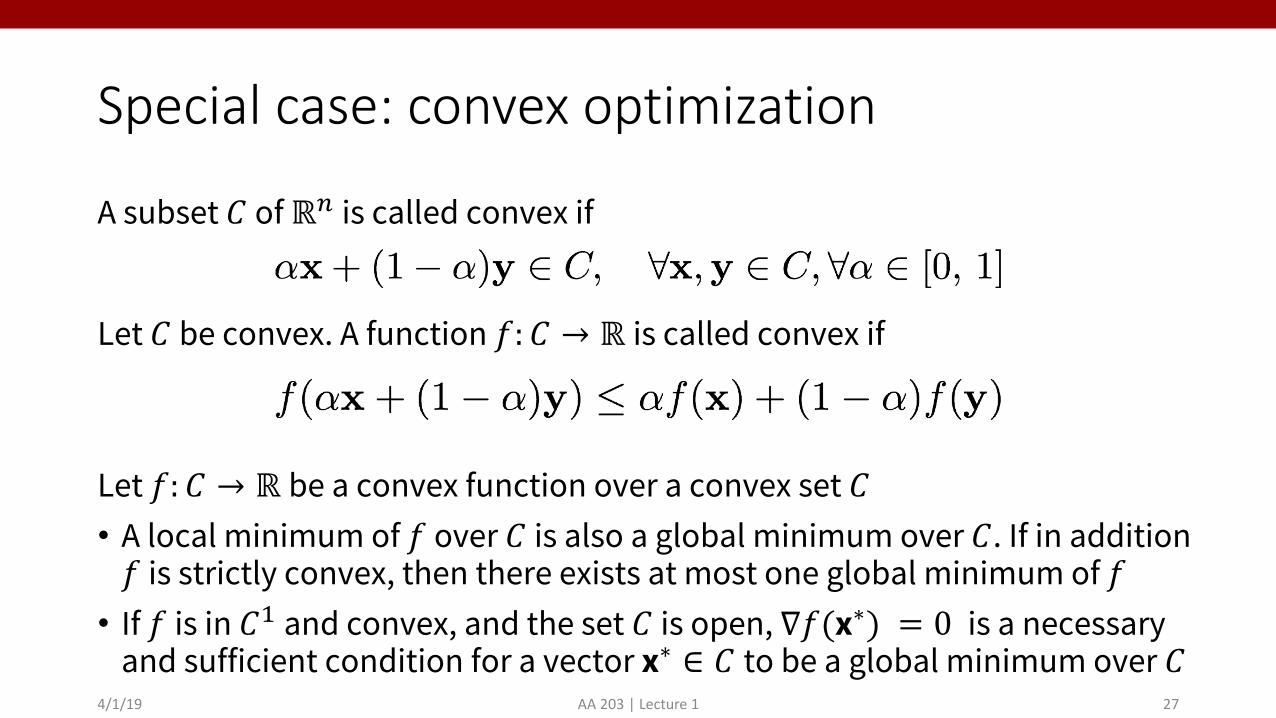
Special case: convex optimization
A subset ! of ℝ# is called convex if
Let ! be convex. A function $: ! → ℝ is called convex if
Let $: ! → ℝ be a convex function over a convex set !• A local minimum of $ over ! is also a global minimum over !. If in addition $ is strictly convex, then there exists at most one global minimum of $• If $ is in !' and convex, and the set ! is open, ∇$(x∗) = 0 is a necessary
and sufficient condition for a vector x∗ ∈ ! to be a global minimum over !4/1/19 AA 203 | Lecture 1 27
Discussion
• Optimality conditions are important to filter candidates for global minima • They often provide the basis for the design and analysis of
optimization algorithms• They can be used for sensitivity analysis
4/1/19 AA 203 | Lecture 1 28
Outline
1. Problem formulation and course goals
2. Non-linear optimization
3. Computational methods
4/1/19 AA 203 | Lecture 1 29
Computational methods (unconstrained case)
Key idea: iterative descent. We start at some point x! (initial guess) and successively generate vectors x", x$, … such that & is decreased at each iteration, i.e.,
The hope is to decrease & all the way to the minimum
4/1/19 AA 203 | Lecture 1 30
Gradient methods
Given x ∈ ℝ# with ∇% & ≠ 0, consider the half line of vectors
From first order Taylor expansion () small)
So for ) small enough %(&+) is smaller than %(&)!
4/1/19 AA 203 | Lecture 1 31

Gradient methods
Carrying this idea one step further, consider the half line of vectors
where ∇" # $% < ' (angle > 90∘)
By Taylor expansion
For small enough ,, "(# + ,%) is smaller than "(#)!
4/1/19 AA 203 | Lecture 1 32
Gradient methods
Broad and important class of algorithms: gradient methods
where if ∇" #$ ≠ 0, '$ is chosen so that
and the stepsize ( is chosen to be positive
4/1/19 AA 203 | Lecture 1 33
Gradient descent
Most often the stepsize is chosen so that
and the method is called gradient descent. “Tuning” parameters:• selecting the descent direction• selecting the stepsize
4/1/19 AA 203 | Lecture 1 34

Selecting the descent direction
General class
(Obviously, ∇" #$ %&$ < 0)
Popular choices:• Steepest descent:
• Newton's method: provided
4/1/19 AA 203 | Lecture 1 35
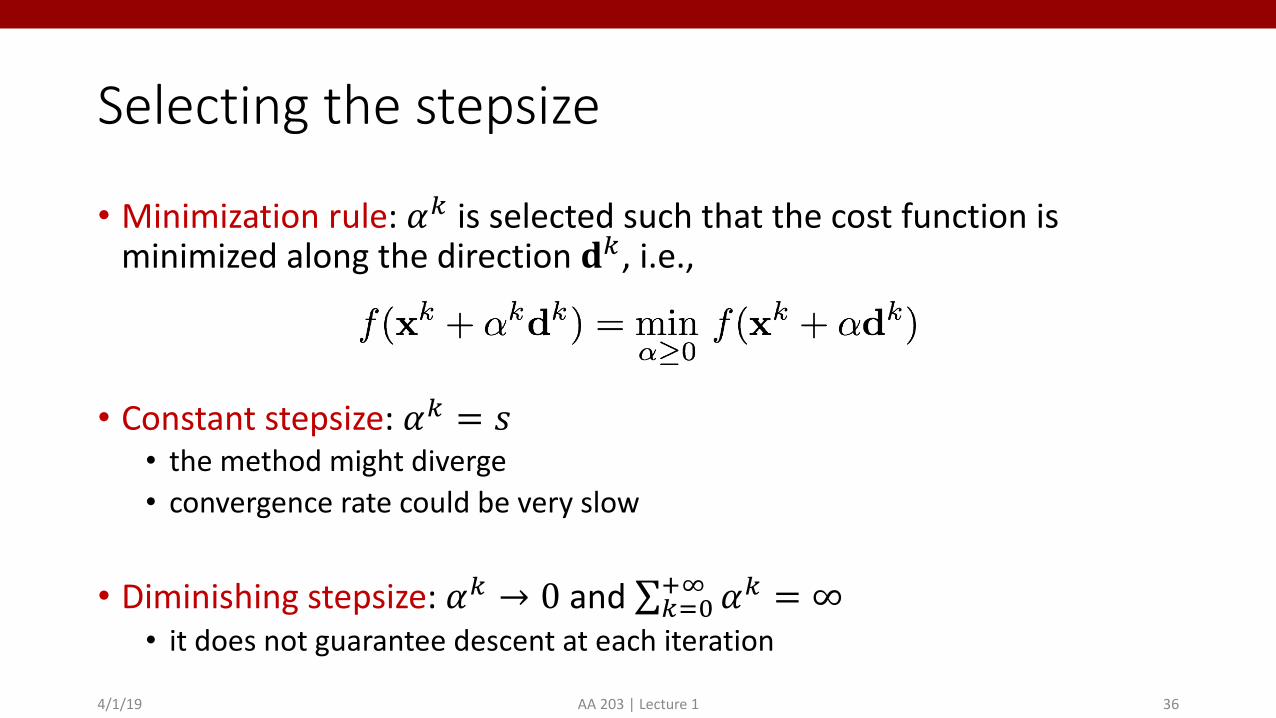
Selecting the stepsize
• Minimization rule: !" is selected such that the cost function is minimized along the direction #", i.e.,
• Constant stepsize: !" = %• the method might diverge• convergence rate could be very slow
• Diminishing stepsize: !" → 0 and ∑")*+, !" = ∞• it does not guarantee descent at each iteration
4/1/19 AA 203 | Lecture 1 36
Discussion
Aspects:• convergence (to stationary points)• termination criteria • convergence rate
Non-derivative methods, e.g., • coordinate descent
4/1/19 AA 203 | Lecture 1 37
Next time
4/1/19 AA 203 | Lecture 1 38
Constrained non-linear optimization