advances in compliant and soft controlled structures for ... · 10.07.2014 mesrob 2014 - prof dr...
TRANSCRIPT

Advances in Compliant and Soft Controlled Structures for Eff i d S f R b E i I i Effective and Safe Robot - Environment Interaction
TUTORIAL
Prof. dr. Petar. B. PETROVIĆC b M f t i S t L b t (CMS L b)CyberManufacturing Systems Laboratory (CMSysLab)Faculty of Mechanical Engineering, Belgrade University
MESROB 2014International Workshop and Summer School on Medical and Service Robotics
EPFL La sanne CH J l 10 12 2014
10.07.2014 1MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
EPFL Lausanne, CH, July 10-12 2014

Joint space stiffness 2Generalized stiffness 1Joint space stiffnessKinematic redundancy and null-space stiffness
23
Generalized virtual displacement 4Numerical examples and experiments 5p p
10.07.2014 2MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Generalized stiffness 1
Robot is not a rigid body! g yAny robot is flexible elastomechanical structure. It deforms like a spring!
From a modeling point of view, flexibility can be assumed as concentrated at the robot joints and / or distributed (in different ways) along the robot links.For the sake of simplicity, robots are classified into two classes:
Robots with flexible jointsRobots with flexible links
10.07.2014 3MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

ROBOT ARM = GENERALIZED SPRING
xKF TCPxTCP δ=Force – displacement relationship:
Task space (Cartezian) stiffness matrix:Task space (Cartezian) stiffness matrix:
xFK TCPx
)(∂
∂=
Li l ti hi b t i fi it i l
xTCPx ∂
Linear relationship between infinitesimal displacements in task and joint space:
qqJxTCP δδ )(=Kineto-statical model of the robot arm
10.07.2014 4MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
qqJxTCP δδ )(

ROBOT ARM = PROGRAMMABLE GENERALIZED SPRING
Robot arm behaves as a GENERALIZED SPRING with PROGRAMMABLE STIFFNESS parameters. We can change the stiffness parameters in time and adapt the robot behavior to the task at adapt the robot behavior to the task at hand.
SUPERVISOR specifies the DESIRED STIFFNESS d i th t h STIFFNESS and in that way morphs compliant behavior of the robot arm
The concept of SOFT ROBOTICS = pLightweight COMPLIANT robotic manipulators
10.07.2014 5MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

WHY COMPLIANT BEHAVIOR?
Compliance can be exploited and is essential to:Compliance can be exploited and is essential to:
Constrained motion control / stability issues and adaptation
Force and Impedance control / robot interaction with environment
Impact control and energy storing
Human-robot interaction / robot in human environment
Safety / intrinsic safety
Humanoid robots that imitate human behavior / uncanny valley problem
10.07.2014 6MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

An example of a manipulation task which requires complex complianace control patterns: Human performing a bimanual peg-in-hole task. Initial configuration (B), and realizedconfiguration as a result of compliance control motions (C). Human and robots’ endingg p ( ) gconfiguration coincide which probably gives evidence to the similarity in control principles.
AARobot controller should effectively
modulate of the size and directionality of the realized TCP
stiffness in task coordinates Since
Stiffness profiles of both robots should provide stiff behavior along the direction of the hole
d li t b h i fil stiffness in task coordinates. Since the hole axis are move in the system
task space TCP stiffness matrix should change in time too.
and a compliant behvioruprofile along other directions to avoid generation of high interaction forces.
6 component F / T sensor
10.07.2014 7MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
B C

An example of the SOFT JOINT with integrated VARIABLE STIFFNESS ACTUATORMechatronic assembly with embedded control and sensory hardware
Link POSITION sensor Cross-roller bearing
Power converter unit
Joint and motor controller boardPower supply board
Mechanical and sensory interface to the nex link
dedicated force / position devicededicated force / position device
Frameless motor + brake + encoder
Harmonic drive gear unit
Link TORQUE sensor
Carbon fiber lightweight and rigid link
10.07.2014 8MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
and rigid linkDLR Soft robot arm

OUR PHILOSOPHY IS CHANGING
Evolutionary stages in design and our understanding of robots:
Stiffer is better → Stiffness isn’t everything → Soft robotics
Robots like MACHINE TOOLS → Robots like HUMANS
adapt the ROBOT to the WORLDadapt the WORLD to the ROBOT
10.07.2014 9MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

SOME COMPLIANT / SOFT ROBOTS
MIT DOMO RobotA Force Sensing Humanoid Robotgfor Manipulation Research (Edsinger and Weber, 2004)
10.07.2014 10MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

ABB FRIDA concept robotDual-arm robot with 14 dof designed to work safely in human environmentto work safely in human environmentFriendly Robot for Industrial Dual-arm Assembly
Joint actuation system:
10.07.2014 11MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
yNo reliable information!

DLR Robot ... KUKA IIWA Robot
Lightweight robot arm with 7 dof and advanced compliance control system
Joint actuation system:Joint actuation system:Custom-made frameles servo motor + hollow shaft harmonic drive reducer
10.07.2014 12MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

UNIVERSAL ROBOTSUR10 Robot UR10 Robot
6 dof collaborative robot arm with inherent li d b kd i bilitcompliance, and backdrivability;
Extremely simple design and consequently cheep robot (towards of robot ubiquity)
Joint actuation system:Custom-made frameles servo motor + hollow shaft harmonic drive reducerhollow shaft harmonic drive reducer
10.07.2014 13MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

BARRETT TECHNOLOGYWAM Arm
Weight of the arm beyond shoulder WAM Arm
7 dof cable drive lightweight robot arm ith i h t li d t l
is 5.8 kg / minimum kinetic and potential energy (less then weight of human arm)
with inherent compliance, and extremely low force backdrivability;
Joint act ation s stem
14 bits joint torque resolution!
Joint actuation system:Custom-made neodymium-iron servo-motor with embedded space-vector commutated current amplifier/control + commutated current amplifier/control + mechanical transmissions based on preloaded (zero-backlash) high-speed, near-frictionless cable transmission ( t t d bl d diff ti l )(patented cabled differentials)
10.07.2014 14MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
WAM = Whole Aarm Manipulator

US Patent 4,903,536 / Feb. 27, 1990COMPACT CABLE TRANSMISSION WITH CABLE DIFFERENTIALInventnors: Kenneth Salisbury et. al.
Preloaded / zero-e oaded / e obacklash Near frictionlessNo vibrations
Entirely gearless driven!
Lightweight
A PERFECT MECHANICAL PLATFORM FOR HIGH PERFOMANCE COMPLIANCE
10.07.2014 15MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
HIGH PERFOMANCE COMPLIANCE CONTROL (including backdrive)

CABLE DIFFERENTIAL DRIVE CONCEPT
10.07.2014 16MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

YASKAWA SIA10 family of redundant articulated robot arms
7 dof anthropomophic robot arm
15 dof dual arm robot 15 dof dual-arm robot
10.07.2014 17MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

JOINT SPACE STIFFNESS MATRIX
Joint space stiffness 2
Energy conservation principle:
Stiffness MAPPING from robot task space to the joint space
WWWW gF δδδδ μτ ++≡ Virtual works associated with joint torques and external forces are identical!0=+ μδδ WWg
xFq TCPT
TCPT δδτ =
μg
Di l t i f t k t
FqJ Tτ )(=qqJxTCP δδ )(= Displacements mapping from task to
joint space
JKJ
q
T δ)()(
)(xKF xδ=
Relationship between joint torques and robot TCP stiffness.
Relationship between joint torques
10.07.2014 18MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
qqJKqJ x δτ )()(= p j qand robot TCP stiffness

qKq= δτ
)()( qqJKqJ T= δτ )()( qqJKqJ
T
x δτ
),()(),( RKqJKqJKqKK nnqx
Txqq ∈== ×
)( qKK qx →An effective interpretation of the above results can be achieved by regarding the robot arm as a MECHANICAL TRANSFORMER of displacements and forces from the joint space to the robot task space. Joint stiffness of the robot arm is a nonlinear function of the desired Cartesian stiffness i e
10.07.2014 19MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
Joint stiffness of the robot arm is a nonlinear function of the desired Cartesian stiffness, i.e., the robot TCP stiffness in its task space and the robot configuration q.

PROBLEM!Off-diagonal entries of the joint space stiffnes matrix are NOT EQUAL to ZERO
∈= ×nnqxd
Tqd RKqJKqJK ),()(
≠∀≠= d jikKqfk 0)( ≠∀≠= ijqxdijqijq jikKqfk ___ ,0 ),,(
⎥⎥⎤
⎢⎢⎡
nqqq
nqqq
kkkkkk
22212
,1_2,1_1,1_
L
LStiffness of the cross-joint actuators
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
= nqqqq
kkk
K ,2_2,2_1,2_ MOMM
actuators
10.07.2014 20MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
⎥⎦⎢⎣ nnqnqnq kkk ,_2,_1,_ L

Desired robot TCP stiffness as a process variable
Desired robot joint space stiffness as a function of the desired robot TCP stiffnes and also a function of the time
xdqdxdT tKqKqJtKqJ = ),,()()()( xdqdxd
KKKKKK
qqq
≠ΔΔ 0
),,()()()(
xxdxKqqqd KKKKKKq ≠Δ ≠−=Δ⎯⎯ →⎯Δ=− 0 0
mmT RKJKJtKK ×−− )()()( 1 mmxq
Tqx RKqJKqJtKqK ×∈= ,)()(),,( 1
Our ability to control of JOINT SPACE STIFFNESS MATRIX is essential for control of robot
10.07.2014 21MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
ykineto-static behavior in the task space!

MORPHING TCP / ENDPOINT STIFFNESS
jik ijq ≠∀≠ ,0_
Technically TOO COMPLEX
REDUNDANCYSolution #1:
Joint actuation redundancy,polyarticular actuators, m = n
COMPLEX actuationSIMPLE kinematics
jik ∀0 0ΔK
kinematics
jik ijq ≠∀≈ ,0_
Solution #2:Kinematic redundancy
Solution #3:Joint actuation redundancy +
no limitations: 0=Δ xKSIMPLE actuationCOMPLEX
COMPLEX actuationCOMPLEX
monoarticular actuators, m < n kinematic redundancy
OPTIMAL FunctionalityTechnically and computationally complex
Technical COMPROMISEComputationally complex
COMPLEX kinematics
COMPLEX kinematics
10.07.2014 22MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
Technically and computationally complexComputationally complex

Solution #1:Joint actuation redundancy
polyarticular actuators
Joint actuation redundancy generates off-diagonal entries of the joint space stiffness matrix, i.e., cross-joint stiffness. Generation of an arbitrary stiffness matrix in the robot task space requires polyarticular actuators
m = ny p q
redundant actuation of the 1 to N type - POLYARTICUALAR ACTUATION
Monoarticular soft drive q2Monoarticular soft drive q2
Monoarticular soft drive q1
⎥⎦
⎤⎢⎣
⎡= 1
00q
q kk
K
10.07.2014 23MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
⎥⎦
⎢⎣ 20 q
q k

In case of redundantly actuated 2dof planar robot arm, the joint stiffness is the SUM of the monoarticular and the biarticular stiffnesses.monoarticular and the biarticular stiffnesses.
Biarticular cross-joint soft drive q12 Monoarticular soft drive q2soft drive q12 Monoarticular soft drive q2
Monoarticular soft drive q1
⎥⎦
⎤⎢⎣
⎡+
+= XXq
q kkkkkk
K 1
10.07.2014 24MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
⎥⎦
⎢⎣ + XqX
q kkk 2

Actuation of the human arm is highly redundant! An extensive actuation redundancy in biological systems certainly has its purpose. This indicates that complex actuation system of human arm uses extensive actuation redundancy to effectively and precisely shape the endpoint stiffness.
The human musculoskeletal system has a spring-like y p gactuation, essential to our interaction with surroundings. These actuators are controlled by motor command and neural by motor command and neural feedback systems.
Th t k d d t diff i l ti ti tt i l l b d!
10.07.2014 25MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
The task-dependent difference in muscle activation pattern is clearly observed!This kind of actuation is TECHNICALLY EXTREMELY COMPLEX to be effectively achieved!

BIARTICULAR VSA Solution with 6 or 12 servo motors and 2 output shafts
OUT #1
and 2 output shafts.
Bi ti l Biarticular coupling member
10.07.2014 26MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
OUT #2

Output shaft and differential planetary gear assembly
BASIC BUILDING module of the bidirectional antagonistic module
Servo motorHarmonic driveWave generatorWave generator
Harmonic driveCircular splineHarmonic drive
Felx spline
Linear spring
Cam disc and cam follower mechanism for generating
10.07.2014 27MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
Felx splinemechanism for generating nonlinear spring sharacteristics

Explicite stiffness control
Implicite stiffness control with embedded mechanical springs
10.07.2014 28MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Agonist Antagonist
Like in byological systems actuators work in pairs.This kind of actuation needs to have an agonist and an antagonist
Case #1: Linear spring joint stiffness
)(2 00 BA xxkkxF −+−= kdxdFkX 2−=−=
Case #1: Linear spring – joint stiffness
Case #2: Nonlinear spring joint stiffness
)()(2 20
2000 ABBA xxkxxkxF −+−−= )(2 00 BAX xxk
dxdFk −==
Case #2: Nonlinear spring – joint stiffness
002
02
0 BABA xxxxx +=
−=
Case #2: Nonlinear spring – equation of motion
Springs must be nonlinear
10.07.2014 29MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
2)(2 00 BA xxx
−Springs must be nonlinear

Embodying Desired Behavior in Variable Stiffness Actuators
Mechanical subassembly with nonlinear springs dirven by two antagonist actuators that can variate the joint stiffnes – embodied desired behavior (developed in DLR Germany )
10.07.2014 30MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
variate the joint stiffnes embodied desired behavior (developed in DLR Germany )

Biological solution of a Variable Stiffness Actuation
10.07.2014 31MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Solution #2:Kinematic redundancymonoarticular actuators
Position and orientation of the end-effector in redundant mechanism can be obtained by infinite number of postures / configurations of its links. The same holds for joint torques: ROBOT TCP FORCE CAN BE monoarticular actuators
m < n INDUCED BY INFINITE NUMBER OF ROBOT CONFIGURATIONS.
f )(nm
TCP
RR
qfx
→
= )(
Task space Joint space
A robot is kinematically redundant if: m < ni.e. if it has more degrees of freedom then those strictly necessary for performing the task asigned.
Redundancy is RELATIVE concept: the dimenzionality of the task space may be less then the dimenzionality of the robot operational space, i.e., the space in which robot can mechanically operate Task space is subspace of the operational space
10.07.2014 32MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
operate. Task space is subspace of the operational space.

Monoarticular soft drive of the joint q2 and all other jointsjoint q2 and all other joints
⎤⎡ 00k
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
3
2
1
000000
q
q
q
kk
kK
⎦⎣ 300 qk
Only SUBOPTIMAL SOLUTION IS POSSIBLE with kinematically redundant robot!But we are engineers, we always look for a good compromise! Consequently, our task is to find g , y g p q y,a SUFFICIENTLY GOOD SOLUTION for the canonization problem of a joint stifness matrix by selecting the optimal robot configuration. With this approach we eliminate the needs for poliarticular actuation of the robot mechanism,
10.07.2014 33MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
i.e., we are looking for the compromise where actuation redundancy will no longer be necessary!

PROBLEM!Only square Jacobian matrix is invertible
)( xqqJ δδ Given displacement of the )( TCPxqqJ δδ = probot TCP / Endpoint
)(1TCPxqJq δδ −=Joint displacement to be
calculated
)())(()()( 11 kTCPkkk txtqJtqtq δ−+ +=
Numerical integration
10.07.2014 34MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

REDUNDANCY RESOLUTION AT THE DISPLACEMENT LEVEL
Two possible solutions: 1 ),( ×∈= mTCPTCP Rxqfx
1. Augmented (extended ) Jacobian method
qf ⎥⎤
⎢⎡ ∂
⎤⎡)(
1 ),(
),(×∈= r
TCPTCP
Ryqhy
qf
nrC
nmnn
CA RqJRqJR
qhq
qfq
qJqJ
qJ ××× ∈∈∈
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣ ∂∂∂=⎥
⎦
⎤⎢⎣
⎡= )(,)(,
)(
)(
)()(
)(
As a result of extending the kinematics at the displacement / velocity level, Jacobian is no longer redundant. But there are two major drawbacks associated with this method:
The dimension of the additional constraint (secondary task constraint differentiable
q ⎥⎦⎢⎣ ∂
The dimension of the additional constraint (secondary task constraint differentiable function h(q)) should be equal to the degree of redundancy. This limitation makes the method not applicable for a wide class of additional / secondary tasks.The other problem is the occurrence of artificial singularities in addition to the primary p g p ytask kinematic singularities. There is a conflict between the primary and secondary tasks. Furthermore these additional singularities are task dependent which makes them hard to determine analytically.
10.07.2014 35MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
2. Jacobian nullspace method

NONHOMOGENOUS SYSTEM
Kinematic redundancy and null-space stiffness 3
Redundant Jacobian matrix turns the robot inverse kinematics to the domain of underdetermined linear systems.
F t l t i t i f th i i t li d i i For rectangular matrices we use extension of the inversion concept - generalized inversion, or pseudo inversion. Generalized inversion requires additional conditions. Therefore, there is an infinite number of solutions.
qxqqJ →−)(min δδδThe least-norm of robot joint displacements condition leads to the Moore-Penrose pseudo inversion of Jacobian matrix
xqJq += )( δδ
Jacobian matrix.
The Moore-Penrose pseudoinverse exists for any matrix and is unique!
( ) mnTT RJJJJ ×−+ 1)()()()(
y q
10.07.2014 36MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
( ) mnTT RqJqJqJqJ ×+ ∈= )()()()(

HOMOGENOUS SYSTEMEvery homogenous system has at least one solution, known as the zero, or trivial solution.
If the system has a square non-singular Jacobian matrix then the trivial solution is only l ti Th f l J bi t i f d d t b t h l ti t ith i fi it solution. Therefore, only Jacobian matrix of redundant robot has a solution set with an infinite
number of nontrivial solutions!
J 0)( δ mTCPxqqJ 0)( ==δ
Set of nontrivial solutions is called NULL-SPACE or KERNEL of JACOBIAN MATRIX
mq 0=δ Trivial solution
Set of nontrivial solutions is called NULL SPACE, or KERNEL of JACOBIAN MATRIX.
}0)(:{))(( mn qqJRqqJN =∈= δδ
10.07.2014 37MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
})({))(( mqqqq

TWO FUNDAMENTAL SUBSPACES are associated with a linear transformation that is generated by Jacobian matrix of the kinematically redundant robot are its null space and its range space.
}:)({))(( nRqqqJqJR ∈= δδThe RANGE of the Jacobian matrix:
The NULL of the Jacobian matrix:
}0)(:{))(( qqJRqqJN mn =∈= δδ
10.07.2014 38MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
))(())(( qJRqJN T=⊥ !!!

Null space calculation:
First, Jacobian matrix is transformed to reduced row echelon form (rref). This transformation always generates unique rref matrix. Jacobian matrix can be transformation in to rref by Gaussian elimination method.
m r = n - m
⎥⎥⎤
⎢⎢⎡ +
)()(00010)()(00001 ,11,1
qaqaqaqa nm
LL
LL
m( )⎥⎥⎥
⎦⎢⎢⎢
⎣
=
+
+
)()(10000
)()(00010)(
1
,21,2
qaqa
qaqaqJrref
nmmm
nm
LL
MMMMMMM
n
⎦⎣ + )()( ,1, qq nmmm
10.07.2014 39MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

( ) 0)( = mqqJrref δ
0)()(0)()( ,111,11 =+++ ++ nnmm qqaqqaq
δδδδδδ L
0)()(
0)()( ,211,22
=+++
=+++ ++ nnmm
qqaqqaq
qqaqqaq
δδδ
δδδMMMM
L
0)()( ,11, =+++ ++ nnmmmmm qqaqqaq δδδ L
r = n - mr n mdimension of the nullspace
(degree of degeneration of the Jacobian matrix)
10.07.2014 40MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Generalized virtual displacement 4
1 )( xqJqq P δδδ == −Nonredundant robot kineto-statics
0)( )()( qqPxqJqqq JNc
NP δδδδδ +=+= +
PARTICULAR SOLUTION of the NONHOMOGENOUS SYSTEM
NULL SOLUTION for theHOMOGENOUS SYSTEM
Task-space displacementEnd-effector displacement, i.e., motion of the robot
mechanism that produces variation of the position and th i t ti f th d ff t
Null-space displacementSelf-motion displacement , i.e., internal motion of the robot mechanism that produces zero-variation of the
iti d th i t ti f th d ff t
10.07.2014 41MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
the orientation of the end-effector position and the orientation of the end-effector

COMPLEMENTARY PROJECTOR Operator that projects an arbitrary n-dimensional vector to the null space of the JacobianPPP =
JNc qqP 0)()( ≡δ
vector to the null space of the Jacobian
)()( qJqJPPIP
PPPc
+=
−=
=
mJN qqP 0)( 0)( ≡δ)()( qJqJP =
0)( )()( qqPxqJqqq JNc
NP δδδδδ +=+= +
PARTICULAR SOLUTION of the NONHOMOGENOUS SYSTEM
NULL SOLUTION for theHOMOGENOUS SYSTEM
Task-space displacementEnd-effector displacement, i.e., motion of the robot
mechanism that produces variation of the position and th i t ti f th d ff t
Null-space displacementSelf-motion displacement , i.e., internal motion of the robot mechanism that produces zero-variation of the
iti d th i t ti f th d ff t
10.07.2014 42MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
the orientation of the end-effector position and the orientation of the end-effector

0)]()([)( qqJqJIxqJq δδδ ++ −+= 0)]()([ )( qqJqJIxqJq n δδδ +
Displacement vector defined by the PRIMARY task
Displacement vector defined by the SECONDARY task
TASK FUSION MACHINEInference machine that provides formally consequent tool for SUPERPOSTION of the PRIMARY task: position and motion control of the robot arm and any other task of SECONDARY priority –NONCONFLINCTING INCLUSION OF SECONDARY TASK into primary control task.
SECONDARY task: Robot TCP STIFFNESS control / morphing
{ }qqdqqn KKKKqRqq −=ΔΔ=∈= ),min( 000 δδδ
S CO tas obot C S SS co t o / o p g
10.07.2014 43MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

{ }qqdqqn KKKKqRqq −=ΔΔ=∈= ),min( 000 δδδ
10.07.2014 44MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Primary task: TCP position control Secondary task: TCP compliance control
0)]()([)( qqJqJIxqJq n δδδ ++ −+=
COST FUNCTION: scalar potential field defined over the robot configuration space
jiqkqunnijq ≠∀= ,)()(
)]1([defined over the robot configuration space - minimum perturbation condition
njq − )]1(2
[_
)min( qKΔ
⎤⎡
⎥⎥⎤
⎢⎢⎡
nqqq
nqqq
kkkkkk
KK ,22,21,2
,1_2,1_1,1_
L
L
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
=≈ nqqqqqd
kkk
KK ,2_2,2_1,2_
L
MOMM
10.07.2014 45MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
⎥⎦⎢⎣ nnqnqnq kkk ,_2,_1,_ L

Primary task: TCP position control Secondary task: TCP compliance control
0)]()([)( qqJqJIxqJq n δδδ ++ −+=
COST FUNCTION: scalar potential field defined over the robot configuration
,)()()]1([_ ≠∀=
−jiqkqu
nnijqdefined over the robot configuration space - minimum perturbation condition
)]1(2
[_ nj
0)min( qKΔ
0 ),()(0 >∂∂
−=∇−= λλλδ quq
quqSearching for the local minimumq
Gradient optimization method for selecting optimal null-space joint vector which minimizes influence of the cross-joint memmbers to the robot TCP stiffness.
10.07.2014 46MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
Suboptimal solution! This solution always exists!

)( qqPq δδ =
Qasistatic Nullspace Projection
0)( )( qqPq JNN δδ =
DISPLACEMENT FORCE DISPLACEMENT-FORCE kineto-static duality cycle
0)( )( ττ qP TJNN =
Dynamic Nullspace Projection
10.07.2014 47MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

SUGGESTED LITERATURE on
LINEAR SPACESLINEAR SPACES
H.Yanai, K. Takeuchi and Y. Takane, PROJECTION MATRICES, GENERALIZED INVERSE ,MATRICES, AND SINGULAR VALUE DECOMPOSITIONSpringer New York Dordrecht Heidelberg London, 2011, ISBN 978-1-4419-9886-6.
10.07.2014 48MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Example #1: MINIMAL r = 1 REDUNDANT ROBOT - MRR-R1
Numerical examples and experiments 5
+==+== 122111
)cos();cos()(
qqcqcclclqfx
m = 1 / n = 2 → r = n – m = 1
Example #1: MINIMAL r 1 REDUNDANT ROBOT MRR R1
+== 211211 )cos();cos( qqcqc
JACOBIAN MATRIX
[ ]( )[ ]−+−=
==
12212211
2,11,1 )()(slslsl
qJqJJ(q)( )[ ]
+==+
211211
12212211
)sin();sin(
qq sqsslslsl
( )[ ] ⎥⎤
⎢⎡
+ 1qlll
δδ
Direct kinematics
10.07.2014 49MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
( )[ ] ⎥⎦
⎢⎣
−+−=2
122122111 qslslslx
δδ

Moore-Penrose PSEUDOINVERSION:
221
211
1,1
)()()(
)()( 11
q+ JqJqJ
qJJ ⎥
⎥⎤
⎢⎢⎡
⎥⎤
⎢⎡ +
+
22,1
21,1
2,1
2,11,1
)()()(
)()()(
)(1,2
1,1
q + JqJqJ
qqqJ
qJ
⎥⎥⎥
⎦⎢⎢⎢
⎣
=⎥⎥⎦⎢
⎢⎣
= ++
Inverse kinematics
)( xqJq δδ = +
( ) ( ) 1122
122112
1222
122112
1 1 xsl
slsl sl+ sls lq
qδ
δδ
⎥⎦
⎤⎢⎣
⎡ +
+−=⎥
⎦
⎤⎢⎣
⎡
10.07.2014 50MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

⎤⎡⎤⎡
RANGE SPACE of Jacobian matrix
12
1
)()(
1,2
1,1 xqJqJ
δδδ
⎥⎥⎦
⎤
⎢⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
+
2122
1221121 )(
)(
1,2
1,1 qsl
slslqqJqJ
q δδδ +== +
+
⎤⎡
Reduced row echelon form of Jacobian matrix .... NULLSPACE of Jacobian matrix
( )[ ]
[ ]2
112212211
1))(())((
0
JfJNqq
slslsl =⎥⎦
⎤⎢⎣
⎡+
δδ
2
1
12211
122 01qq
slslsl
δδ
=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+[ ]
1222,1
)()(
)(
1))(())((
llsl
JqJ
qaa
aqJrrefqJN
xx
x
+===
==
212211
1222
1,1
2,11
212211
)()(
qslsl
slqqJqJ
q
q
δδδ+
−=−=
⎦⎣⎦⎣
10.07.2014 51MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
122111,1 )( slslqJ + ,

PARTICULAR SOLUTION in accordance to the Moore-Penrose Jacobian inverse
2122
122111 q
slslslq δδ +
=212211
1221 q
slslslq δδ+
−=
10.07.2014 52MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

COMPLEMENTARY PROJECTOR to the nullspace of the Moore-Penrose Jacobian inverse
[ ]⎥⎥⎥⎤
⎢⎢⎢⎡
−=−= +
22,1
21,1
2,11,12
2,12
1,1
2,1
))(( )()()()()(
)()()()(
)(
)()(1 qJqJqJq + JqJ
qJqJq + JqJ
qJ
qJqJP qJNc [ ]
⎥⎥
⎦⎢⎢
⎣− 2
2,12
1,1
1,12
2,12
1,1
2,11,1
)()()(
)()()()()()(
q + JqJqJ
q + JqJqJqJqq
( ) ( )( )
( ) ( ) ⎥⎤
⎢⎡ +
− 2212212211
22122
lllslslsl
lllsl
( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )
=
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣ ++
++
−
++=
2122
212211
122112
1222
12211
12212211
2122
212211
2122
212211))((
sl+slslslsl
sl+slslslslsl
sl+ slslsl+ sls lP qJNc
( ) ( ) ( ) ( )
( ) ( )( )
( ) ⎥⎦
⎤⎢⎣
⎡++−+−
+=
⎦⎣ ++
1221112212211
1221221112222
1221221112212211
1 slslslslsl
slslslslsl+slsl
sl+ slslsl+ sls l
10.07.2014 53MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
( ) ( ) ( ) ⎦⎣ +++ 122111221221112212211 slslslslslsl+ sls l

SECONDARY TASK DISPLACEMENT VECTORProjected arbitrary configuration vector to the nullspace of the Jacobian matrix:
[ ] [ ] TNNN qqqqJqJq )()(1 201000 δδδδ =−= +
0222,1
21,1
2,11,1012
2,12
1,1
2,110 )()(
)()()()(
)(q
q + JqJqJqJ
qq + JqJ
qJq N δδδ =−+=
( ) ( )( )
( ) ( ) 022122
212211
12212211012
1222
12211
122
,,,,
q sl+ sls l
slslslq sl+ sls l
sl δδ+
+−+
+=
021,1
012,11,1
20
)()()(q
qJq
qJqJq N δδδ =+−=
( )( ) ( ) ( ) ( ) 0222
122110122
12212211
0222,1
21,1
0122,1
21,1
20 )()()()(
qslslqslslsl
qq+ JqJ
qq+ JqJ
q N
δδ
δδδ
+−
+−=
+
10.07.2014 54MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
( ) ( ) ( ) ( ) 022122
212211
012122
212211
qsl+ slsl
qsl+ sls l ++

10.07.2014 55MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

⎤⎡ )()()(2 JJJ
⎥⎥⎦
⎤
⎢⎢⎣
⎡=→=
)()()()()()(
22,12,11,1
2,11,11,1
qJqJqJqJqJqJ
kKkK xqxx
10.07.2014 56MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
Joint stiffness matrix

( ))()()( slslslkqJqJkqu +==
COST Function:
( )122111222,11,1 )()()( slslslkqJqJkqu xx +==
SCALAR POTENTIAL Field
10.07.2014 57MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
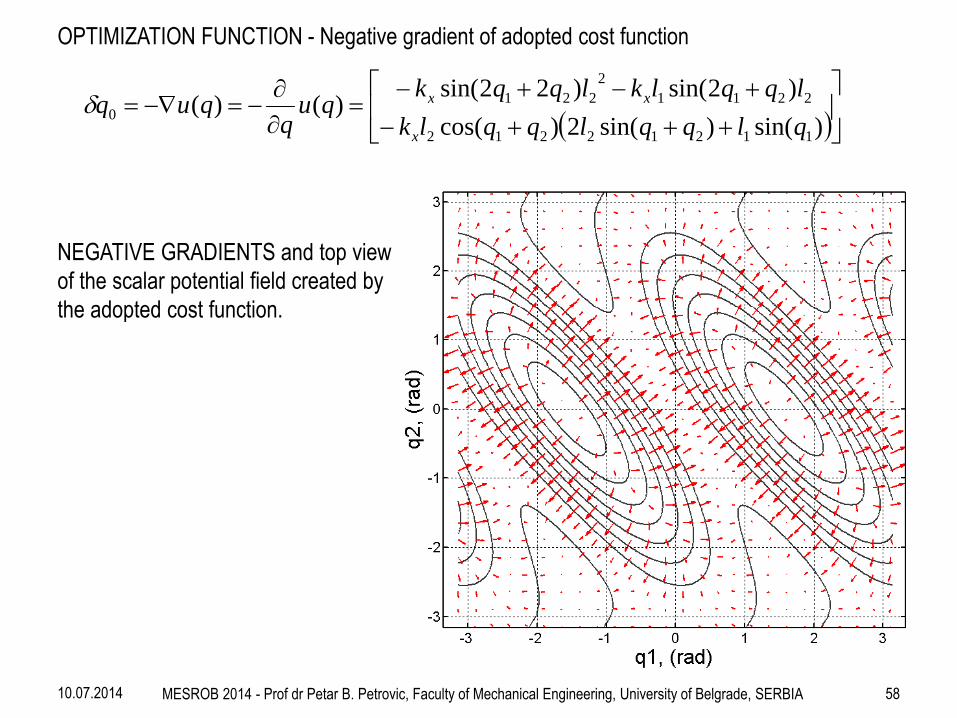
⎥⎤
⎢⎡ +−+−∂
∇)2sin()22sin()()( 2211
2221 lqqlklqqkququq xxδ
OPTIMIZATION FUNCTION - Negative gradient of adopted cost function
( )⎥⎦⎢⎣ +++−
=∂
−=−∇=)sin()sin(2)cos(
)()(11212212
22112210 qlqqlqqlk
quq
quqx
xxδ
NEGATIVE GRADIENTS and top view of the scalar potential field created by the adopted cost functionthe adopted cost function.
10.07.2014 58MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Relative variation of generated TCP stiffness over the entire configuration space
,)()(),,( 1 ∈= ×−− mmxq
Tqx RKqJKqJtKqK
D i d tiff K d 1
0
,)()(),,(
0 ≠−=Δ⎯⎯ →⎯Δ=− ≠Δ xxdxKqqqd
xqqx
KKKKKK
qqq
q
Desired stiffness: Kxd = 1
10.07.2014 59MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

An example of robot internal / nullspace motion for given x_d = (L1 + L2) / 2
Robot mechanism parameters:l_1 = 0.36 ml_2 = 0.7* l_1 = 0.252 m
Desired position:l 1 0 36
l_2 = 0.252 m
Nullspace motionp
x_d = (L1 + L2) / 2 = 0.306ml_1 = 0.36 m
q optimal:q_optimal:
q1 = - 0.7583 (rad)q2 = 2.1510 (rad)
x_d = 0.306m
10.07.2014 60MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Robot nullspace motion and corresponding value of generated TCP stiffness
Nullspace motion trajectory for given x_d = 0.306 m
Desired stiffness: Kxd = 1Desired stiffness: Kxd = 1
10.07.2014 61MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Desired stiffness: Kxd = 1
End of nullspace range End of nullspace range
q_optimal for x_d = 0.306mm :
q_1 = -0.7583 (rad)q_2 = 2.1510 (rad)
10.07.2014 62MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Example #2: MINIMAL r = 2 REDUNDANT ROBOT - MRR-R2
m = 1 / n = 2 → r = n – m = 2
Analytical model ...............
10.07.2014 63MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

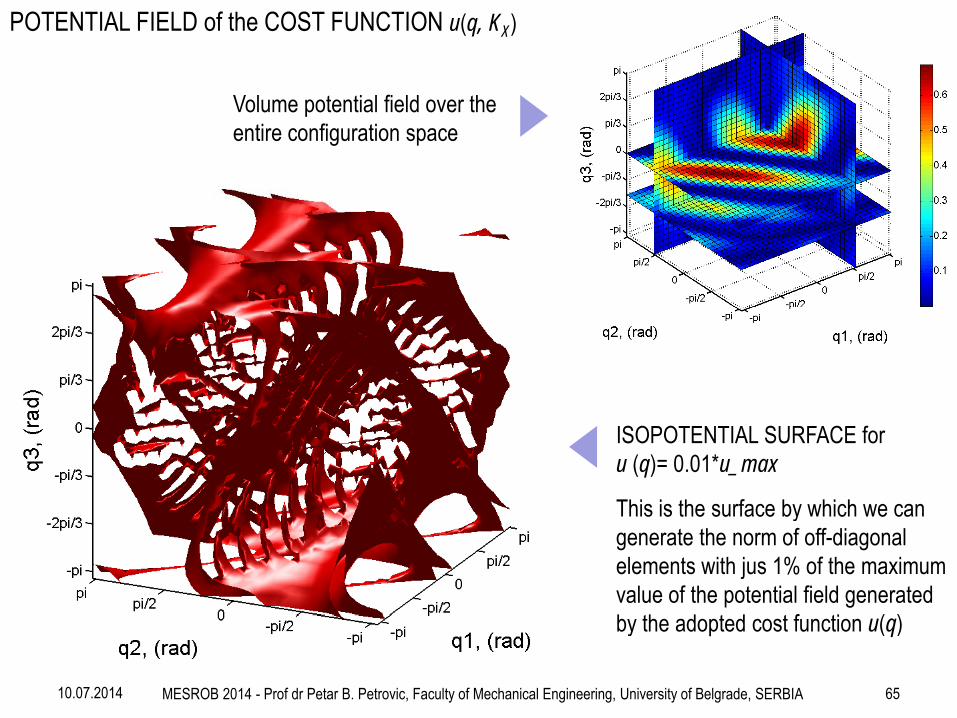
POTENTIAL FIELD of the COST FUNCTION u(q, KX)
Volume potential field over the
Orthogonal slice at q2 = pi/2
Volume potential field over the entire configuration space
q2, (rad)q1, (rad)
POTENTIAL FIELD SLICE for q_2 = pi/2Stream lines indicate negative ggradient of the potential field sliced surface. Stream lines smoothly converges to the nearest minimum of the potential field.
10.07.2014 64MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
p
q1, (rad) q3, (rad)
POTENTIAL FIELD of the COST FUNCTION u(q, KX)
Volume potential field over the Volume potential field over the entire configuration space
ISOPOTENTIAL SURFACE for u (q)= 0.01*u_max
This is the surface by which we can This is the surface by which we can generate the norm of off-diagonal elements with jus 1% of the maximum value of the potential field generated b th d t d t f ti ( )
10.07.2014 65MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
by the adopted cost function u(q)

EXPERIMENTAL SETUP USED AT CMSYS LAB FOR NULLSPACE STIFFNESS EVALUATION
7dof Yaskawa SIA 10F robot arm which is reduced to 3dof redundant SCARA configuration
CMSysLab at University of Belgrade
10.07.2014 66MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

NULL-SPACE STIFFNESS MEASUREMENTInfluence of the robot self motion to the TCP stiffness parameters
Measuring setup for TCP excitation in X DIRECTION
Measuring setup for TCP excitation in Y DIRECTION
Mechanism for generation of external force with integrated
Laser sensor for TCP displacement
CMSysLab at University of Belgrade
10.07.2014 67MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
external force with integrated single axis force sensor
displacement measurement

Posture # 4Recorded displacements of the TCP in horizontal xy plane for 4 POSTURES in the robot nullspace induced by CONSTANT EXCITATION FORCE of 40N applied in x and y direction
Posture # 3 Posture # 4
direction.
Posture # 3 Posture # 4
Posture # 3
Posture # 2
Posture # 3
Posture # 2
Posture # 1Posture # 1
10.07.2014 68MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
TCP stiffness is posture dependant and highly nonlinear!

Strain gaugesBonding of strain gauges to the link interface flange
Soft joint developed at CMSyLab
Servo motor
EncoderDistributed multiprocessor s stem for force/position
CMSysLab at University of Belgrade
system for force/position control of the VSA actuator
ReducerSensorized link interfacing flange
10.07.2014 69MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Soft joint behaves as a LINEAR SPRINGVery soft Stiff
Joint angular displacementdisplacement
Joint reactive torqueq
Joint displacementfunction
10.07.2014 70MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Soft joint behaves as a SPRING WITH CONSTANT REACTIVE FORCEVery soft Stiff
Joint angular displacementdisplacement
Joint reactive torqueq
Joint displacementfunction
10.07.2014 71MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Soft joint behaves as a PASSIVE, BACKDRIVABLE SYSTEMLight Heavy
Joint angular displacementdisplacement
Joint reactive torqueq
Joint displacementfunction
10.07.2014 72MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

ACCURACY OF THE NULL-SPACE MOTION MEASUREMENT‘motion leakage’ from the robot nullspace to the task space
Yaskawa SIA 10F robot R d d t ti l t d b t
Robot virtual TCP support / pivoting pin (no Redundant articulated robot
arm with 7 d.o.f.Payload : 10 kgArm reach: 720 mmT t l i ht 60k
pivoting pin (no motion is allowed theoretically)
Total arm weight: 60kg
Laser sensor (optical curtain)
Precise XY rotary table ith h ll t l (optical curtain)with hollow central area
CMSysLab at University of Belgrade
10.07.2014 73MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
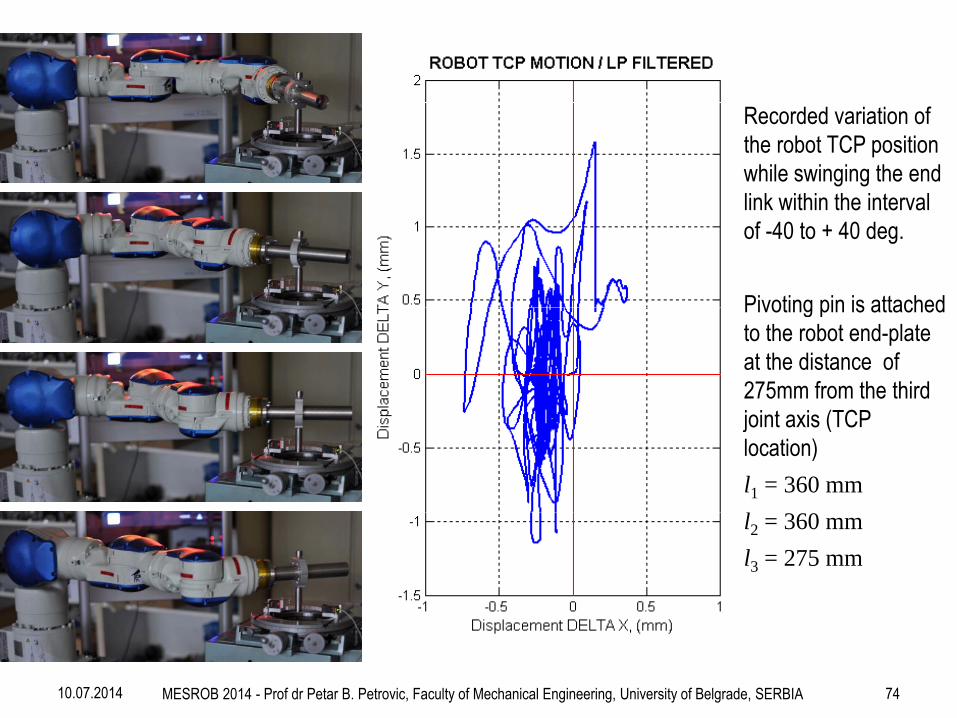
Recorded variation of the robot TCP position while swinging the end link within the interval link within the interval of -40 to + 40 deg.
Pivoting pin is attached Pivoting pin is attached to the robot end-plate at the distance of 275mm from the third j i i (TCP joint axis (TCP location) l1 = 360 mmll2 = 360 mml3 = 275 mm
10.07.2014 74MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA

Th k f tt tiThank you for your attention
Self motion and null space stiffness control researchSelf motion and null-space stiffness control research
10.07.2014 75MESROB 2014 - Prof dr Petar B. Petrovic, Faculty of Mechanical Engineering, University of Belgrade, SERBIA
This research is supported by the Serbian Ministry for Science and Technology Development under the grant No. TR35007: Smart Robotic Systems for Customized Manufacturing