aeroacoustics: introduction, measurement, computation and ... · aeroacoustics: introduction,...
TRANSCRIPT

Aeroacoustics: Introduction, Measurement,Computation and Control
Xun Huang
Mechanics and Aerospace EngineeringPeking University
Lecture for China Aerodynamics Research Institute of Aeronautics,June 2010
[email protected] (Peking University) Aeroacoustics June 2010 1 / 46

Personal Track of Record
95-99 NWPU 99-02 THU 02-03 GE GRC 03-09 UoS 09-Present PKUBackground: Aeroacoustics, Signal Processing, and Control.
[email protected] (Peking University) Aeroacoustics June 2010 2 / 46


My Research Group at PKU
(a) Long Bai (b) Qingkai Wei (c) Jianchao Ji
(d) Chi Xu (e) Igor Vinogradov
[email protected] (Peking University) Aeroacoustics June 2010 4 / 46
PKUHyper
(f) Hypersonic vehicle (g) Rapid prototype controller
[email protected] (Peking University) Aeroacoustics June 2010 5 / 46

Outline for the Lecture of Aeroacoustics
1 Motivation
2 Beamforming
3 Observer
4 Validations
5 Summary
[email protected] (Peking University) Aeroacoustics June 2010 6 / 46
Motivation
The Research Objectives?
(h) Cruise noise? (i) Cabin noise reduction?
Carbin noise
[email protected] (Peking University) Aeroacoustics June 2010 7 / 46

Motivation
Magic of Human Technology
”I had the privilege to fly once in an Air France Concord. The mostnoteworthy thing was that it was not really any different from any otheraircraft. The cabin noise was quite normal.”Where the noise mainly from?
[email protected] (Peking University) Aeroacoustics June 2010 8 / 46

Motivation
Landing and Take-off Noise Problems
[email protected] (Peking University) Aeroacoustics June 2010 9 / 46

Motivation
CARDC 2020 Objectives
[email protected] (Peking University) Aeroacoustics June 2010 10 / 46

Motivation
Innovative Designs Emerging
[email protected] (Peking University) Aeroacoustics June 2010 11 / 46

Motivation
Strategy Problem for Our Country
[email protected] (Peking University) Aeroacoustics June 2010 12 / 46

Motivation
Aircraft Noise at Various Flight Stages
Take off noise Landing noise
[email protected] (Peking University) Aeroacoustics June 2010 13 / 46

Motivation
Aircraft Noise Certification
To solve the problem
Set overall noise reduction objective;
Identify noise sources;
Modify/improve design accordingly;
Check aerodynamics and noise performance.
Applicable methodologies
Theory (aeroacoustics), experiments (array) and computation (CAA).
[email protected] (Peking University) Aeroacoustics June 2010 14 / 46

Motivation
Certification
But provide little information for aeroacoustic design.
[email protected] (Peking University) Aeroacoustics June 2010 15 / 46

Motivation
Noise Measurements
Flow-induced noise study hence focuses on noise measurements.
[email protected] (Peking University) Aeroacoustics June 2010 16 / 46

Beamforming
Array Measurement Fundamentals
[email protected] (Peking University) Aeroacoustics June 2010 17 / 46

Beamforming
Array Measurement Directivity
[email protected] (Peking University) Aeroacoustics June 2010 18 / 46
Beamforming
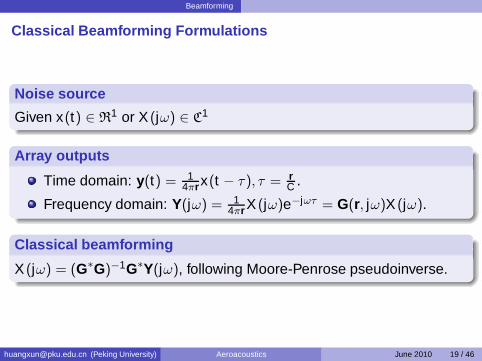
Classical Beamforming Formulations
Noise source
Given x(t) ∈ R1 or X (jω) ∈ C
1
Array outputs
Time domain: y(t) = 14πr x(t − τ), τ = r
C .
Frequency domain: Y(jω) = 14πr X (jω)e−jωτ = G(r, jω)X (jω).
Classical beamforming
X (jω) = (G∗G)−1G∗Y(jω), following Moore-Penrose pseudoinverse.
[email protected] (Peking University) Aeroacoustics June 2010 19 / 46

Beamforming
Problems in Classical Beamforming
Background noise can at least be partially resolved by algorithmdevelopment.
[email protected] (Peking University) Aeroacoustics June 2010 20 / 46

Beamforming
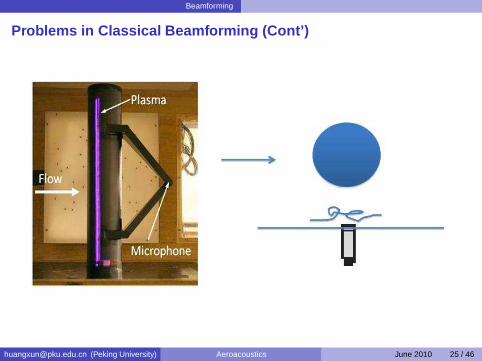
Problems in Classical Beamforming (Cont’)
Background noise and solutions
Array outputs YB(jω) = G(r, jω)XB , and YBS(jω) = G(r, jω)XBS .
If XBS = XB + XS , sound satisfies superposition.
Define AB = YBY∗B, ABS = YBSY∗
BS , < AS >≈< ABS > − < AB >.
Open problem: cases with coherent sources, i.e. < XBX ∗S > 6= 0.
[email protected] (Peking University) Aeroacoustics June 2010 21 / 46

Beamforming
Problems in Classical Beamforming (Cont’)
[email protected] (Peking University) Aeroacoustics June 2010 22 / 46
Beamforming
Problems in Classical Beamforming (Cont’)
−0.4
−0.2
0
0.2
0.4
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
−0.5
0
0.5
1
1.5
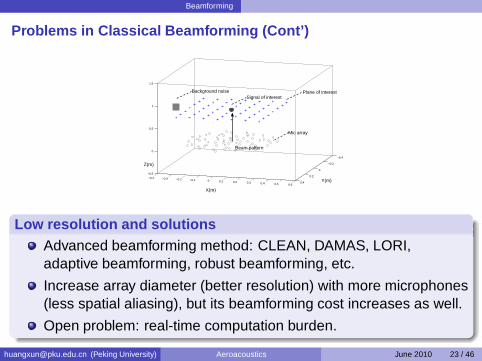
Background noise
Mic array
Signal of interest
Z(m)
X(m)
Y(m)
Beam pattern
Plane of interest
Low resolution and solutionsAdvanced beamforming method: CLEAN, DAMAS, LORI,adaptive beamforming, robust beamforming, etc.
Increase array diameter (better resolution) with more microphones(less spatial aliasing), but its beamforming cost increases as well.
Open problem: real-time computation burden.
[email protected] (Peking University) Aeroacoustics June 2010 23 / 46

Beamforming
Problems in Classical Beamforming (Cont’)
[email protected] (Peking University) Aeroacoustics June 2010 24 / 46
Beamforming
Problems in Classical Beamforming (Cont’)
[email protected] (Peking University) Aeroacoustics June 2010 25 / 46

Beamforming
Anechoic Chamber Experiments
[email protected] (Peking University) Aeroacoustics June 2010 26 / 46

Beamforming
Wind Tunnel Experiments
[email protected] (Peking University) Aeroacoustics June 2010 27 / 46

Beamforming
Wind Tunnel Experiments
[email protected] (Peking University) Aeroacoustics June 2010 28 / 46
Observer
Observer IntroductionOpen problems remain : real-time computation burden.Can we develop a real-time algorithm that can identify coherent noisesources? Borrow idea from classical control theory.
Signal model
x(t) = Ax(t) + Bu(t), state equation, a new equation.y(t) = Gx(t), measurement equation.
[email protected] (Peking University) Aeroacoustics June 2010 29 / 46
Observer
Observer IntroductionOpen problems remain : real-time computation burden.Can we develop a real-time algorithm that can identify coherent noisesources? Borrow idea from classical control theory.
Signal model
x(t) = Ax(t) + Bu(t), state equation, a new equation.y(t) = Gx(t), measurement equation.
Observer˙x(t) = Ax(t) + Bu(t) + L(y − y).y(t) = Gx(t), where x is the estimation of x .
[email protected] (Peking University) Aeroacoustics June 2010 29 / 46

Observer
Observer IntroductionOpen problems remain : real-time computation burden.Can we develop a real-time algorithm that can identify coherent noisesources? Borrow idea from classical control theory.
Signal model
x(t) = Ax(t) + Bu(t), state equation, a new equation.y(t) = Gx(t), measurement equation.
Observer˙x(t) = Ax(t) + Bu(t) + L(y − y).y(t) = Gx(t), where x is the estimation of x .
Estimation error
e = x − ˙x = (A− LG)e, e approaches 0 as long as the eigenvalue(s) of(A − LG) is(are) less than 0, which is assured by accordingly setting L.
[email protected] (Peking University) Aeroacoustics June 2010 29 / 46
Observer
Observer in Frequency Domain
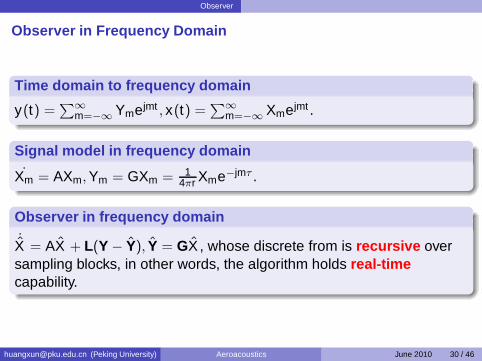
Time domain to frequency domain
y(t) =∑∞
m=−∞ Ymejmt , x(t) =∑∞
m=−∞ Xmejmt .
Signal model in frequency domain
Xm = AXm, Ym = GXm = 14πr Xme−jmτ .
Observer in frequency domain˙X = AX + L(Y − Y), Y = GX , whose discrete from is recursive oversampling blocks, in other words, the algorithm holds real-timecapability.
[email protected] (Peking University) Aeroacoustics June 2010 30 / 46
Observer
Observer In Wind Tunnel
(
YB
YBS
)
=
(
GGejφ G
)(
XB
XS
)
, (1)
where φ is the phase shift due to the time difference between the twomeasurements of YB and YBS .
[email protected] (Peking University) Aeroacoustics June 2010 31 / 46

Observer
Observer-Based Method
The linear state model of the sound propagation is:(
XB|k+1XS|k+1
)
=
(
A 00 A
)(
XB|kXS|k
)
, (2)
(
YB|kYBS |k
)
=
(
G 0Geiφ G
)(
XB|kXS|k
)
. (3)
The corresponding state observer are:(
XB|k+1
XS |k+1
)
=
(
A 00 A
)
(
XB|kXS|k
)
+ L
[
(
YB |kYBS |k
)
−
(
YB|kYBS |k
)]
,
(4)(
YB|kYBS |k
)
=
(
G 0Geiφ G
)
(
XB|kXS|k
)
. (5)
[email protected] (Peking University) Aeroacoustics June 2010 32 / 46
Observer
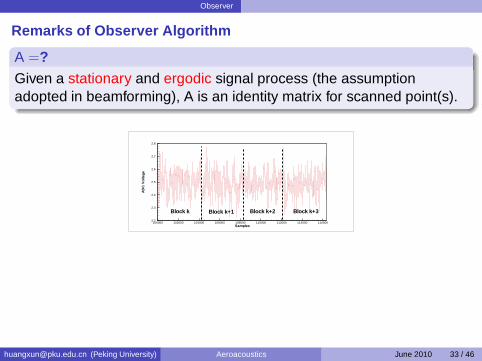
Remarks of Observer Algorithm
A =?Given a stationary and ergodic signal process (the assumptionadopted in beamforming), A is an identity matrix for scanned point(s).
Samples
AD
CV
olta
ge
100000 102000 104000 106000 108000 110000 112000 114000 1160002.2
2.3
2.4
2.5
2.6
2.7
2.8
Block k Block k+1 Block k+3Block k+2
[email protected] (Peking University) Aeroacoustics June 2010 33 / 46

Observer
Remarks of Observer Algorithm
A =?Given a stationary and ergodic signal process (the assumptionadopted in beamforming), A is an identity matrix for scanned point(s).
Samples
AD
CV
olta
ge
100000 102000 104000 106000 108000 110000 112000 114000 1160002.2
2.3
2.4
2.5
2.6
2.7
2.8
Block k Block k+1 Block k+3Block k+2
φ =? Assumed known in X. Huang, JAXA, 2009, but can be
φ|k+1 = φ|k + mH∗(Y|k − Y|k ), (6)
where H , ∂Y/∂φ.
[email protected] (Peking University) Aeroacoustics June 2010 33 / 46

Observer
Summary of the Algorithm
(
XB|k+1
XS|k+1
)
=
(
A 00 A
)
(
XB|kXS|k
)
+ L
[
(
YB|kYBS |k
)
−
(
YB |kYBS |k
)]
,
(7)(
YB |kYBS |k
)
=
(
G 0Geiφ|k G
)(
XB|kXS |k
)
, (8)
φ|k+1 = φ|k + mH∗(Y|k − Y|k ). (9)
Prepare A, G, initial guess φ and X , and compute L;
Collect one block of data Y and generate an sound image.
Conduct Eq. (9) to approximate φ.
Recursively repeat above two steps for each block.
[email protected] (Peking University) Aeroacoustics June 2010 34 / 46

Observer
Point Spread Function
(j) Beamforming. (k) Observer.
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25−30
−25
−20
−15
−10
−5
0
5
x
dB
beamformingobserver
(l)
[email protected] (Peking University) Aeroacoustics June 2010 35 / 46

Validations
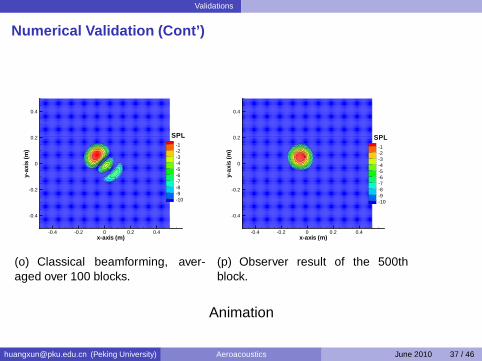
Numerical ValidationTwo monopoles of 3 kHz are closely placed. Both are coherent with120 deg difference in φ. The bottom right one is regarded as abackground noise. An array consists of 56 microphones. Typicalbeamforming and observer-based method are tested to remove thecoherent background noise below.
x-axis (m)
y-ax
is(m
)
0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(m) Coherent noise sources.
−0.4
−0.2
0
0.2
0.4
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
−0.5
0
0.5
1
1.5
Background noise
Mic array
Signal of interest
Z(m)
X(m)
Y(m)
Beam pattern
Plane of interest
(n) Array [email protected] (Peking University) Aeroacoustics June 2010 36 / 46
Validations
Numerical Validation (Cont’)
x-axis (m)
y-ax
is(m
)
0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(o) Classical beamforming, aver-aged over 100 blocks.
x-axis (m)
y-ax
is(m
)0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(p) Observer result of the 500thblock.
Animation
[email protected] (Peking University) Aeroacoustics June 2010 37 / 46

Validations
Computational Costs
Beamforming cost
AB = YBY∗B, ABS = YBSY∗
BS , < AS >≈< ABS > − < AB >,|X (jω)| =
√
(G∗G)−1G∗ < AS > G(G∗G)−1.Cost O(N × N × b), N is array sensor number, and b sample blocks.
Observer cost
(
XB|k+1
XS|k+1
)
=
(
A 00 A
)
(
XB|kXS|k
)
+ L
[
(
YB|kYBS |k
)
−
(
YB |kYBS |k
)]
,
φ|k+1 = φ|k + mH∗(Y|k − Y|k ).
Cost O(N × N) for each sample block.
[email protected] (Peking University) Aeroacoustics June 2010 38 / 46

Validations
Convergence Rate
The convergence of the estimation error (φ − φ) of each sampling datablock, where φ is approximated for each scanned points.
Blocks
Est
imat
ion
erro
r(de
g)
0 500 1000 1500 2000 2500 30000
5
10
15
20
25
30
[email protected] (Peking University) Aeroacoustics June 2010 39 / 46

Validations
Convergence Rate (Cont’)Approximate φ for a representative scanned point only. Adjust φ in theoriginal data (black line), the estimation φ can approach φ quickly in10 blocks, which last less than 1 s. However, an error of 5 deg betweenφ and φ appears.
Blocks
φ
0 100 200 300 400 500
50
100
150
200
Phase shiftPhase estimation
(deg
)
[email protected] (Peking University) Aeroacoustics June 2010 40 / 46

Validations
Experimental Setup of PKUArray
[email protected] (Peking University) Aeroacoustics June 2010 41 / 46

Validations
Experimental Setup (Cont’)
[email protected] (Peking University) Aeroacoustics June 2010 42 / 46

Validations
Experimental Results
x-axis (m)
y-ax
is(m
)
0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(q) Beamforming, BKG.
x-axis (m)
y-ax
is(m
)
0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(r) Beamforming, no BKG.
x-axis (m)
y-ax
is(m
)
0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(s) Observer, k=1.
x-axis (m)
y-ax
is(m
)
0.4 0.2 0 0.2 0.4
0.4
0.2
0
0.2
0.4
SPL12345678910
(t) Observer, [email protected] (Peking University) Aeroacoustics June 2010 43 / 46

Validations
Experimental Results (Cont’)
The estimation φ|k is insensitive to the chosen of φ|k=0.
Blocks
φ
0 20 40 60 80 100170
175
180
185
190
195
200
Initial estimation=180 degInitial estimation=172 degInitial estimation=196 deg
estim
atio
n(d
eg)
[email protected] (Peking University) Aeroacoustics June 2010 44 / 46
Summary
Summary
Summarise of the history of aeroacoustics;
Introduce classical beamforming and its aeroacoustic applications;
Propose a new algorithm holds real-time capability;
Provide various numerical and experimental results.
[email protected] (Peking University) Aeroacoustics June 2010 45 / 46
