(a)$experiment$ (b)$simula1on$
TRANSCRIPT
1
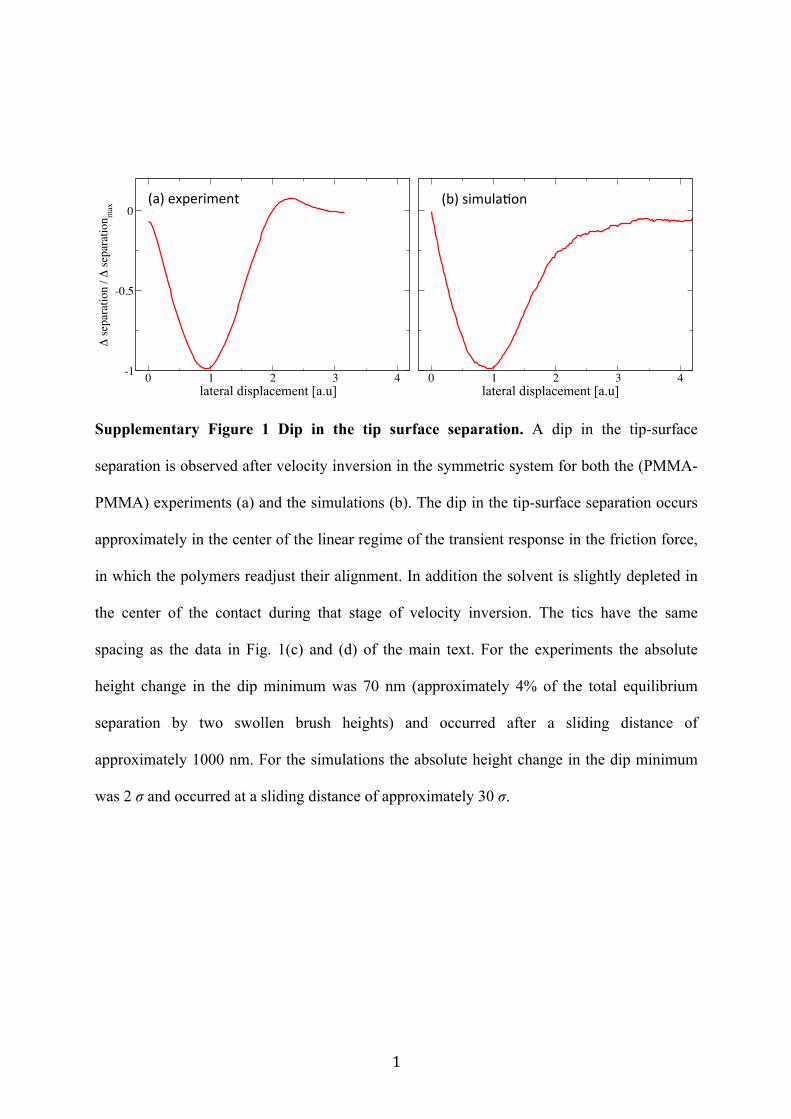
Supplementary Figure 1 Dip in the tip surface separation. A dip in the tip-surface
separation is observed after velocity inversion in the symmetric system for both the (PMMA-
PMMA) experiments (a) and the simulations (b). The dip in the tip-surface separation occurs
approximately in the center of the linear regime of the transient response in the friction force,
in which the polymers readjust their alignment. In addition the solvent is slightly depleted in
the center of the contact during that stage of velocity inversion. The tics have the same
spacing as the data in Fig. 1(c) and (d) of the main text. For the experiments the absolute
height change in the dip minimum was 70 nm (approximately 4% of the total equilibrium
separation by two swollen brush heights) and occurred after a sliding distance of
approximately 1000 nm. For the simulations the absolute height change in the dip minimum
was 2 σ and occurred at a sliding distance of approximately 30 σ.
0 1 2 3 4distance / (d2-d1)
-1
-0.5
0
6 se
para
tion
/ 6 se
para
tion m
ax0 1 2 3 4
distance / (d2-d1)
-1
-0.5
0
6 se
para
tion
/ 6 se
para
tion m
ax
lateral displacement [a.u] lateral displacement [a.u]
(a)$experiment$ (b)$simula1on$

2
Supplementary Figure 2 Transient response after velocity inversion asymmetric system.
The measured (a) and simulated (b) force traces for the asymmetric system. The experimental
force traces are flattened after the transient response.
0 10 20 30 40-0.02
0
0.02
F / F
sssymm
0 10 20 30 40-0.02
0
0.02
F / F
sssymm
(a)$experiment$
(b)$simula1on$
lateral displacement
3
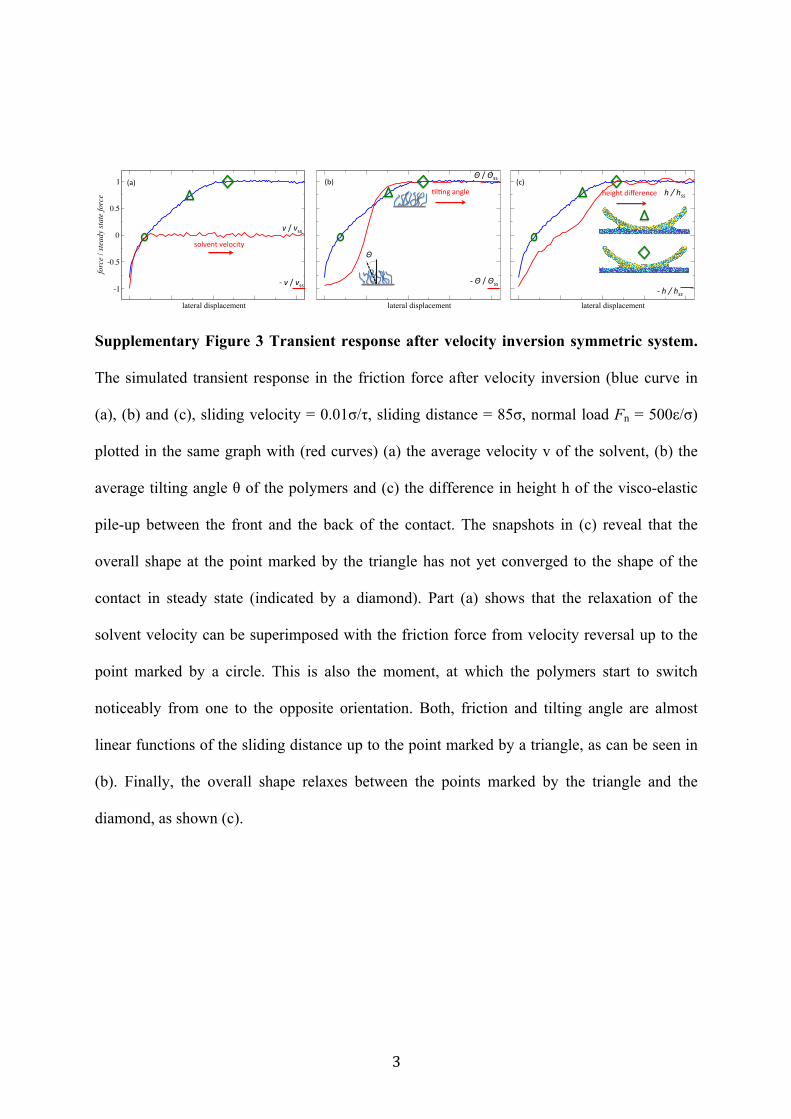
Supplementary Figure 3 Transient response after velocity inversion symmetric system.
The simulated transient response in the friction force after velocity inversion (blue curve in
(a), (b) and (c), sliding velocity = 0.01σ/τ, sliding distance = 85σ, normal load Fn = 500ε/σ)
plotted in the same graph with (red curves) (a) the average velocity v of the solvent, (b) the
average tilting angle θ of the polymers and (c) the difference in height h of the visco-elastic
pile-up between the front and the back of the contact. The snapshots in (c) reveal that the
overall shape at the point marked by the triangle has not yet converged to the shape of the
contact in steady state (indicated by a diamond). Part (a) shows that the relaxation of the
solvent velocity can be superimposed with the friction force from velocity reversal up to the
point marked by a circle. This is also the moment, at which the polymers start to switch
noticeably from one to the opposite orientation. Both, friction and tilting angle are almost
linear functions of the sliding distance up to the point marked by a triangle, as can be seen in
(b). Finally, the overall shape relaxes between the points marked by the triangle and the
diamond, as shown (c).
0 1 2 3 4
distance [a.u]0 1 2 3 4
distance [a.u]0 1 2 3 4
distance [a.u]
-1
-0.5
0
0.5
1
forc
e / s
tead
y st
ate
forc
e
!"v"/"vss"
"v"/"vss"
solvent"velocity"
.l.ng"angle"
Θ"/"Θss"
#$Θ"/"Θss"
$$Θ""
#$h$/$hss$
$h$/$hss$
lateral displacement lateral displacement lateral displacement
(a)" (b)" (c)"height"difference"
4
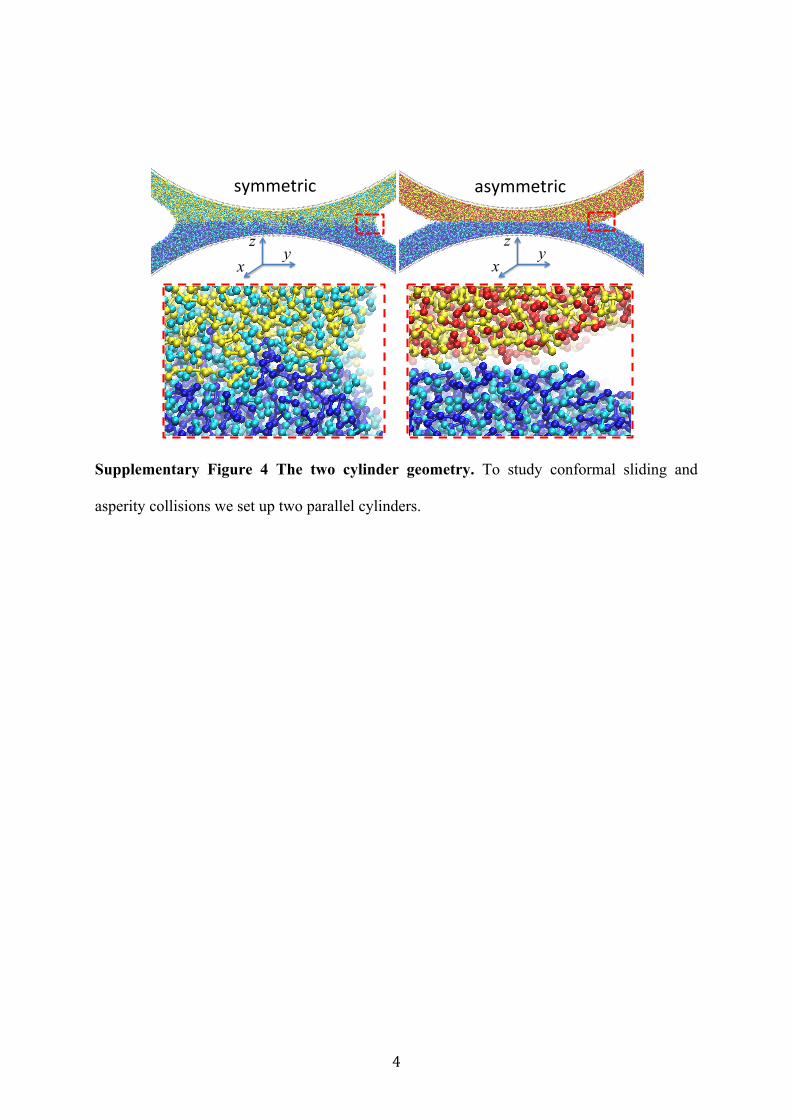
Supplementary Figure 4 The two cylinder geometry. To study conformal sliding and
asperity collisions we set up two parallel cylinders.
!"##$%&'() *!"##$%&'()
z y
x
z y
x

5
Supplementary Figure 5 The friction forces for the symmetric and asymmetric system in
long term measurements. The symmetric system consists out of two PNIPAM brushes. The
asymmetric system consists of a PNIPAM brush (colloid) on a PMMA brush-covered surface.
The brushes are fully solvated. The friction reduction remains approximately two orders of
magnitude. Over 4 hours, the force for the symmetric system slowly decreases. We believe
this is due to wear: The chain pullout decreases the grafting density and reduces the friction
forces. The friction force for the asymmetric system slowly increases. We believe this is due
to the slow evaporation of acetophenone from the PMMA brush.
6
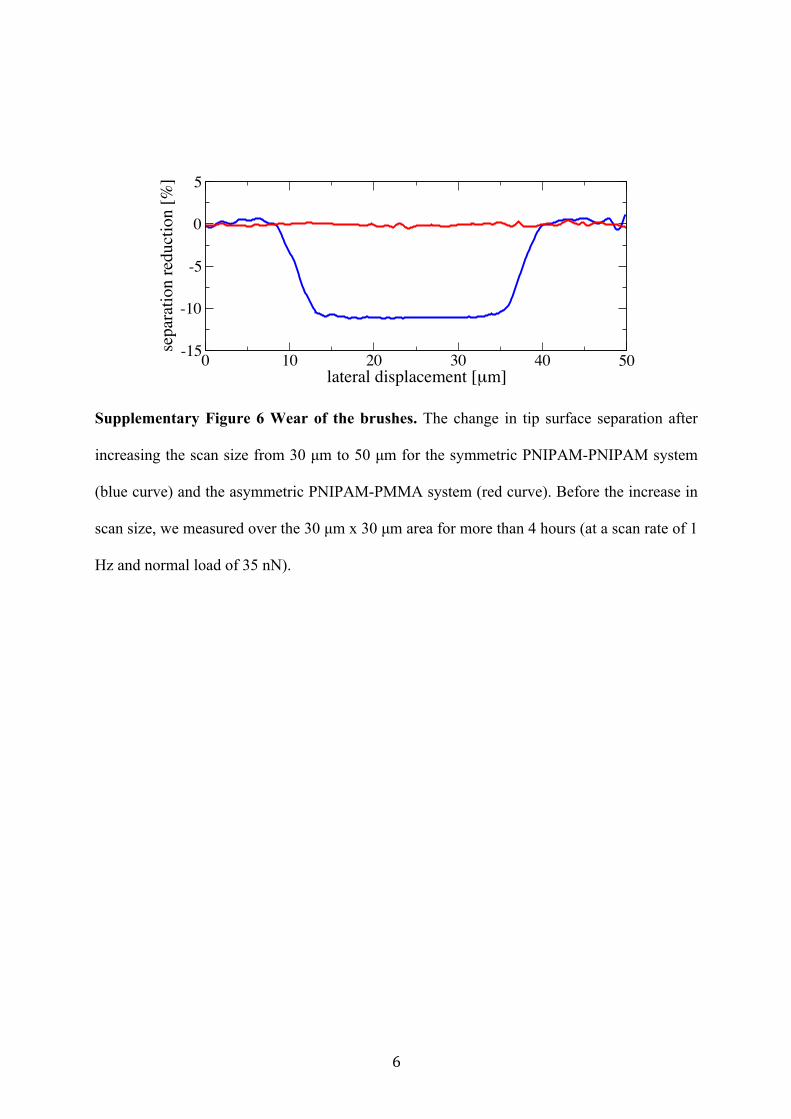
Supplementary Figure 6 Wear of the brushes. The change in tip surface separation after
increasing the scan size from 30 µm to 50 µm for the symmetric PNIPAM-PNIPAM system
(blue curve) and the asymmetric PNIPAM-PMMA system (red curve). Before the increase in
scan size, we measured over the 30 µm x 30 µm area for more than 4 hours (at a scan rate of 1
Hz and normal load of 35 nN).
0 10 20 30 40 50lateral displacement [µm]
-15
-10
-5
0
5se
para
tion
redu
ctio
n [%
]
7
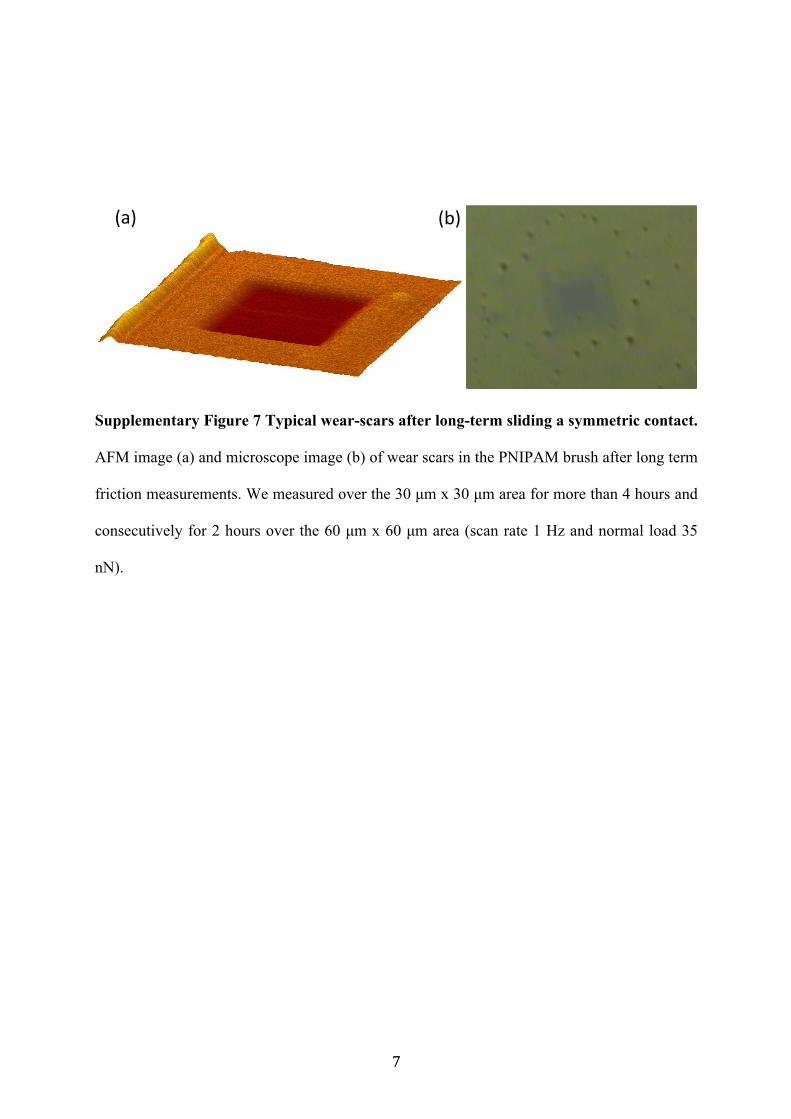
Supplementary Figure 7 Typical wear-scars after long-term sliding a symmetric contact.
AFM image (a) and microscope image (b) of wear scars in the PNIPAM brush after long term
friction measurements. We measured over the 30 µm x 30 µm area for more than 4 hours and
consecutively for 2 hours over the 60 µm x 60 µm area (scan rate 1 Hz and normal load 35
nN).
!"#$ !%#$
8
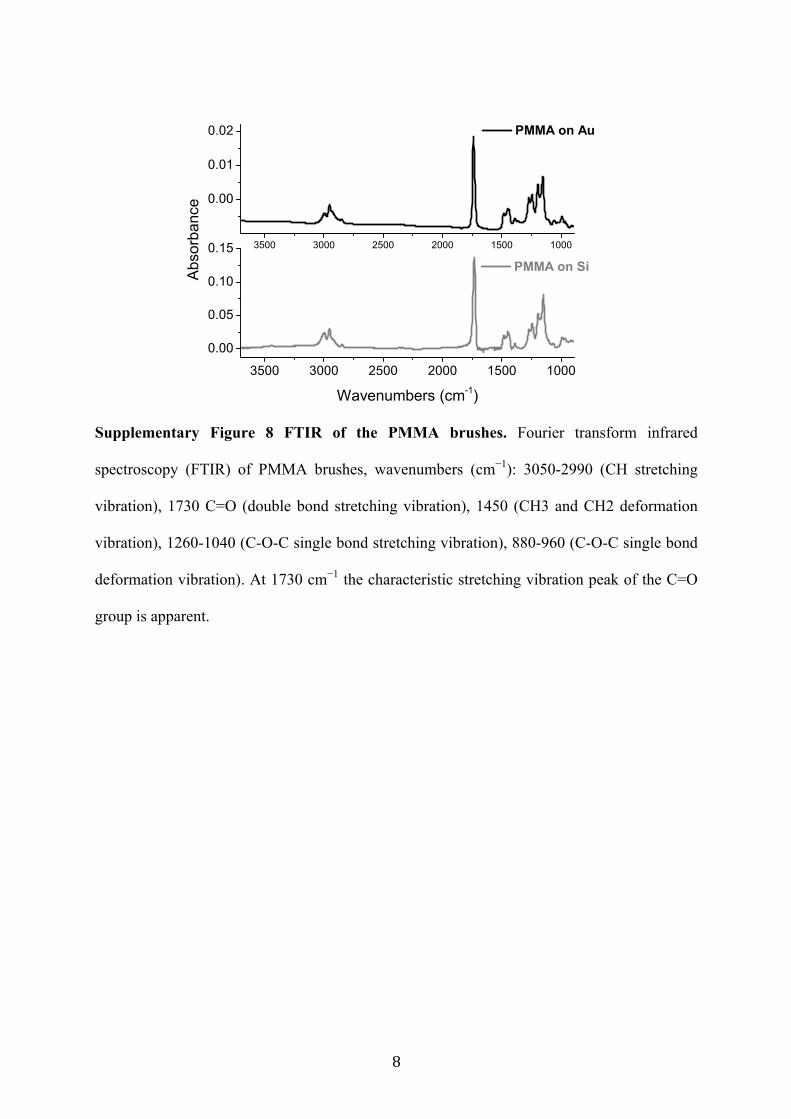
Supplementary Figure 8 FTIR of the PMMA brushes. Fourier transform infrared
spectroscopy (FTIR) of PMMA brushes, wavenumbers (cm−1): 3050-2990 (CH stretching
vibration), 1730 C=O (double bond stretching vibration), 1450 (CH3 and CH2 deformation
vibration), 1260-1040 (C-O-C single bond stretching vibration), 880-960 (C-O-C single bond
deformation vibration). At 1730 cm−1 the characteristic stretching vibration peak of the C=O
group is apparent.
3500 3000 2500 2000 1500 1000
0.00
0.01
0.02 PMMA on Au
3500 3000 2500 2000 1500 1000
0.00
0.05
0.10
0.15 PMMA on SiA
bsorbance
Wavenumbers (cm-1)
9
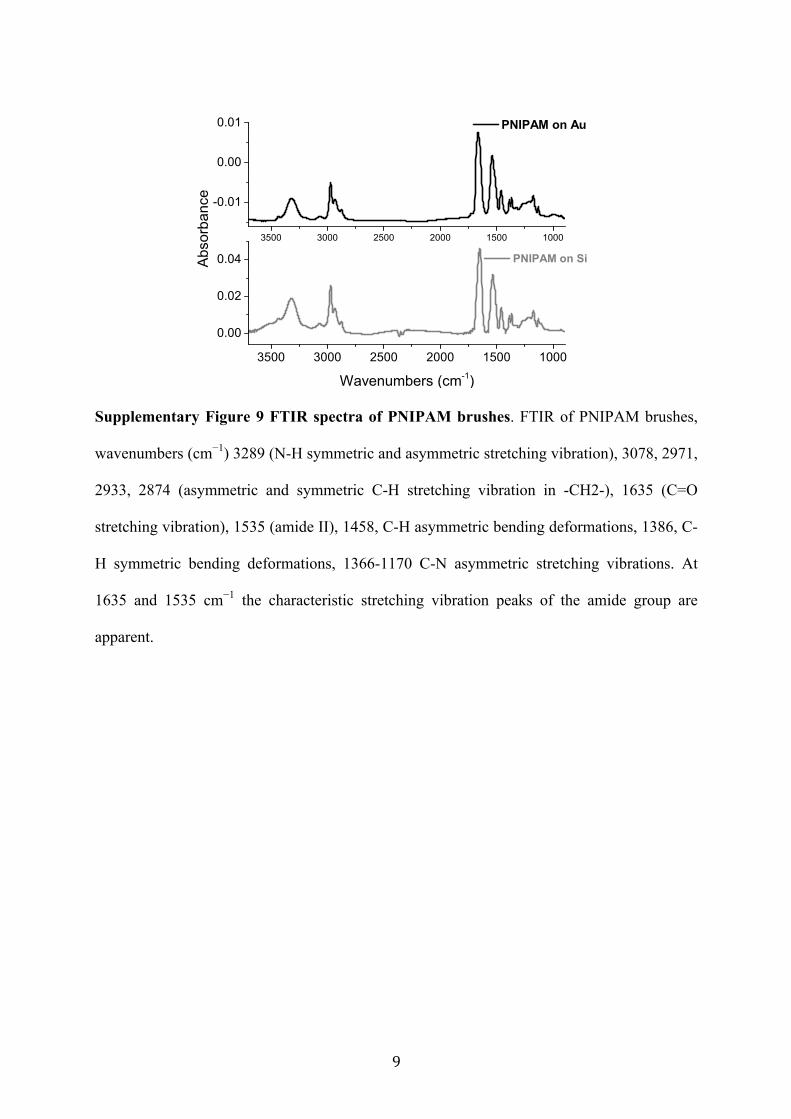
Supplementary Figure 9 FTIR spectra of PNIPAM brushes. FTIR of PNIPAM brushes,
wavenumbers (cm−1) 3289 (N-H symmetric and asymmetric stretching vibration), 3078, 2971,
2933, 2874 (asymmetric and symmetric C-H stretching vibration in -CH2-), 1635 (C=O
stretching vibration), 1535 (amide II), 1458, C-H asymmetric bending deformations, 1386, C-
H symmetric bending deformations, 1366-1170 C-N asymmetric stretching vibrations. At
1635 and 1535 cm−1 the characteristic stretching vibration peaks of the amide group are
apparent.
3500 3000 2500 2000 1500 1000
-0.01
0.00
0.01 PNIPAM on Au
3500 3000 2500 2000 1500 1000
0.00
0.02
0.04 PNIPAM on SiAbsorbance
Wavenumbers (cm-1)
10
Supplementary Notes
To put ourselves into a position in which we can rightfully compare experiment and
simulation, we tried to match dimensionless numbers as well as possible rather than to make
selected parameters identical. The rational is that dimensionless numbers predominantly
determine responses in fluid mechanics. Unfortunately, one can essentially only dispose of
two parameters in the experiments, i.e, the degree of polymerization P, and the grafting
density α, once a specific chemistry is identified. We chose them such that the Weissenberg
number W, i.e, the product of shear rate γ and the characteristic relaxation time τ would be of
similar order of magnitude. We also tried to keep the geometry, charaterized by the ratio of
brush height and radius of curvature, similar. A third parameter is the swelling ratio, which is
the swollen brush height normalized by the dry brush height. In the experimental system, the
ratio of swollen and unswollen brush is a little greater than three. In the simulations, the
swelling ratio is approximately 2.6. The detailed rational for the choices of grafting densities
and chain lengths can be summarized as follows: Firstly, experiments are done at much
smaller velocities and much smaller shear rates γ than the simulations. They deviate by
approximately four decades. Thus, in order to roughly match the Weissenberg number W
between simulation and experiment, we needed to set up experimental systems with
correlation times exceeding those of the in-silico brushes by a similar factor. This could be
achieved by using large degrees of polymerization. To make a crude estimate, we pursue as
follows: Polymer brushes have a spectrum of relaxation times1. For interdigitation, the
relevant relaxation time and thus W scales as γ(η(kBT)-1)P2.31(αg/d)0.31, where η is the solvent
viscosity, T is the temperature, P is the degree of polymerization, αg is the grafting density,
and d is the distance between the chains2. Thus, we can calculate the ratio Wexp/Wsim = 0.21.
Even if our calculations are off by one decade, we would argue that we targeted the
Weissenberg sufficiently well, as we see no qualitatively different results in the simulations
11
when changing shear rates by one decade in either direction. Secondly, we tried to keep the
geometric ratio R/L0 (R is tip radius and L0 is the swollen brush height) constant. For the
experiments and simulations described in the main text, we had R/L0 = 6 and R/L0 = 5,
respectively. In addition, all fluids are low viscosity solvents. Thus, the solvents should
always respond reasonably fast to changes and the polymers be much slower.
One parameter that turned out different between simulations and experiments is the Tabor
coefficient, µT, which is a dimensionless measure for how long-ranged interactions are.
Specifically, we associate a short-range interaction (or in the language of Hertzian contact
mechanics a JKR-like contact) with the experimental systems, in particular for the symmetric
contacts. Therefore, we found a weaker increase of the friction force on the normal load in the
experiments than in the simulations. Yet, the differences between JKR and DMT like contacts
are relatively subtle, i.e., prefactors and exponents describing displacement-load curves differ
by no more than O(30%). This is why one can expect that exponents differ for laboratory and
in-silico brushes, but trends will be similar.

12
Supplementary Methods
The experimental data is averaged over 70-150 force traces, symmetrized and small residual
oscillations (due to interference of the laser-light) are filtered out by fitting and subtracting a
cosine with a separation- dependent phase-shift. Moreover, the first 100 force traces are
discarded. In the simulations, 5 force traces were needed to equilibrate the system.
We discussed in the main text, that for the symmetric system both the simulated and the
measured transient response after velocity-inversion can be fitted with an empirical shape
function that consists of an exponential relaxation, a linear regime and an exponential
relaxation to the steady state force. The 3 different regimes are connected via a Heaviside
function θ(x), where θ(x < 0) = 0, θ(x > 0) = 1 and θ(x = 0) = 0.5. This results in the following
fit-function:
F = −Fss exp (−x/λ1) θ(X1−x) + (Ax+B) θ(x−X1) θ(X2−x) + Fss(1−Cexp(−x/λ2) θ(x−X2),
in which Fss is the steady state force, x is the sliding distance, λ1 and λ2 are the first and second
relaxation distance resp., A sets the slope of the linear regime, B the crossing with the y-axis
for the linear regime, C the decay of the final exponential relaxation and X1 and X2 are the
distances at which we link regime 1 to 2 and 2 to 3 resp.. By normalizing the measured or
simulated force by Fss and the sliding distance by, e.g. λ1, we are left with 6 fitting
parameters. By imposing that at X1 and X2 the function and its derivative should be
continuous, we can eliminate 4 more parameters, such that 2 independent fitting parameters
remain. At the highest simulation velocities (v > 0.01σ/τ) not all data perfectly matched the
shape function. For these datasets an extra fitting parameter is introduced by replacing the
function for the initial relaxation by −Fss + D (1 − exp (−x/λ1)), such that the final value of the
initial relaxation can be different from 0.

13
Supplementary References
1. de Beer, S. and Müser, M. H. Alternative dissipation mechanisms and the effect of the
solvent in friction between polymer brushes on rough surfaces, Soft Matter 9, 7234-7241
(2013).
2. Spirin, L., Galuschko, A., Kreer, T., Johner, A., Baschnagel, J. and Binder, K., Polymer-
brush lubrication in the limit of strong compression, Eur. Phys. J. E 33, 307-311 (2010).