aggregation of evidence from random and fuzzy sets alberto bernardini associate professor
DESCRIPTION
WORKSHOP “ Applications of Fuzzy Sets and Fuzzy Logic to Engineering Problems ". Pertisau, Tyrol, Austria - September 29th, October 1st, 2002. Aggregation of Evidence from Random and Fuzzy Sets Alberto Bernardini Associate Professor Dipartimento di Costruzioni e Trasporti - PowerPoint PPT PresentationTRANSCRIPT
WORKSHOP “Applications of Fuzzy Sets and Fuzzy Logic to Engineering Problems".
Pertisau, Tyrol, Austria - September 29th, October 1st, 2002
Aggregation of Evidence from
Random and Fuzzy Sets
Alberto Bernardini
Associate Professor
Dipartimento di Costruzioni e Trasporti
University of Padova, Italy

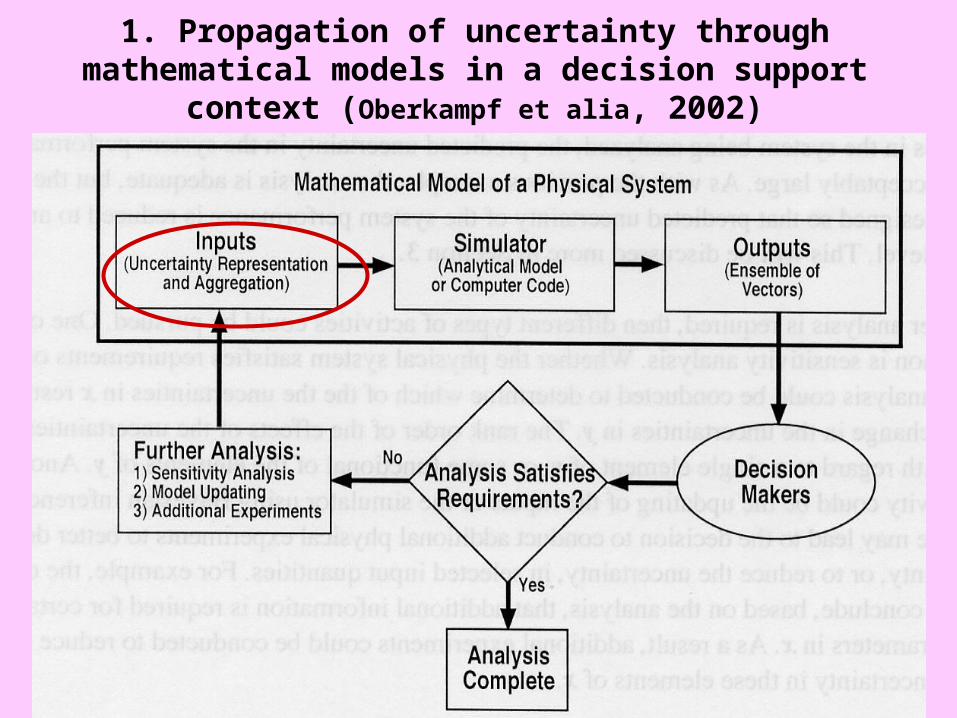
1. Propagation of uncertainty through mathematical models in a decision support context (Oberkampf et alia, 2002)

Challenge Problem A: abaY )(
1. a is an interval, b is an interval
2. a is an interval, b is characterized by multiple intervals
3. a and b are characterized by multiple intervals
4. a is an interval, b is specified by a probability distribution with imprecise parameters
5. a is characterized by multiple intervals, b is specified by a probability distribution with imprecise parameters
6. a is an interval, b is a precise probability distribution

Challenge Problem B:
22/ cmk
k
kY
XDs
• m is given by a precise triangular probability distribution
• k is given by n independent, equally credible, sources of information through triangular probability distributions with parameters measured by closed intervals
• c is given by q independent, equally credible, sources of information through closed intervals
• is given by a triangular probability distribution with parameters measured by closed intervals

Two Key problems
1 -Combination of random and set uncertainty
(random set uncertainty)
2 - Aggregation of different, eventually independent, sources of uncertain information
Both random and set uncertainty could be Aleatory (objective) or Epistemic (subjective)

2. RANDOM SET THEORY
Histograms of disjoint subsets Ai X
m m(Ai ) Ai
x 1 B B(x)
if B = Ai | i = k to l : Pr (B) = m (Ai ) | Ai B
else m (Ai ) | Ai B Pr (B) m (Ai ) | Ai B
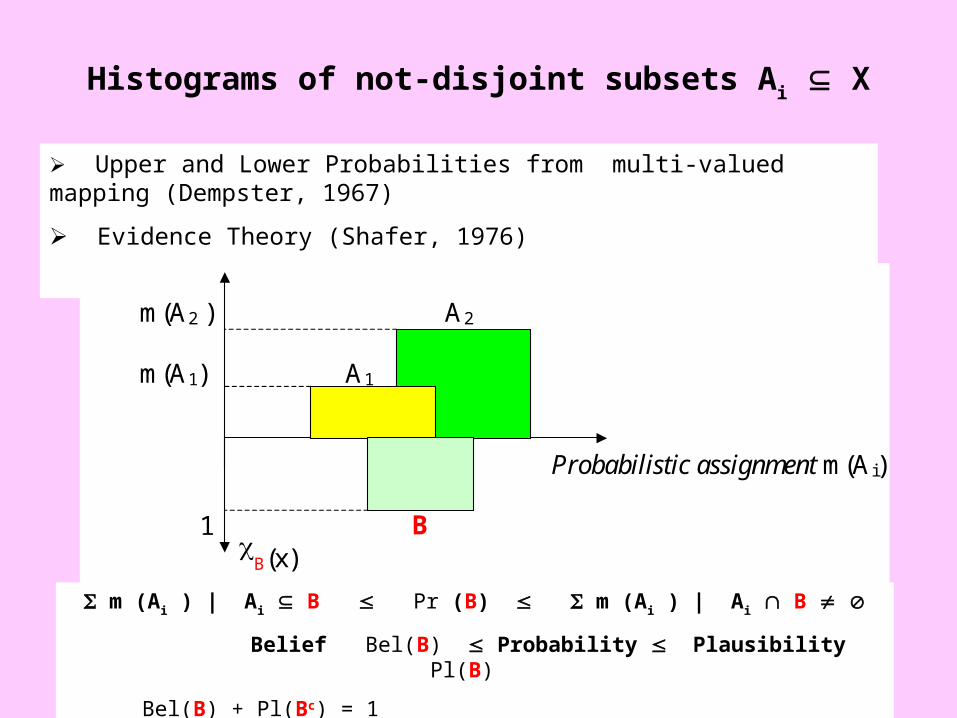
Histograms of not-disjoint subsets Ai X
Upper and Lower Probabilities from multi-valued mapping (Dempster, 1967)
Evidence Theory (Shafer, 1976)
m(A2 ) A2 m(A1) A1 Probabilistic assignment m(Ai) 1 B B(x)
m (Ai ) | Ai B Pr (B) m (Ai ) | Ai B
Belief Bel(B) Probability Plausibility Pl(B)
Bel(B) + Pl(Bc) = 1

Distribution on the singletons of a focal element Ai of the
“free probability” m(Ai) m(Ai ) Ai = [xL , xR ] m(Ai )/| Ai |
xL xR x Upper and Lower Cumulative Distribution Functions FLOW(x) = Pl ( B(x) = tX| t x) F(x) 1 FUPP(x) = Bel ( B(x) = tX| t x)= 1 - Pl ( tX| t > x) FWHP = White Probabilities x ELOW (f(x)) E (f(x)) EUPP (f(x))

Contour Function (x) = Pl ( B = x)
(x) 1 m2
m1
x
Pl ( B = x ) = (x)
Bel ( B = x ) = 0 if | Aì| > 1 for i = 1 to n
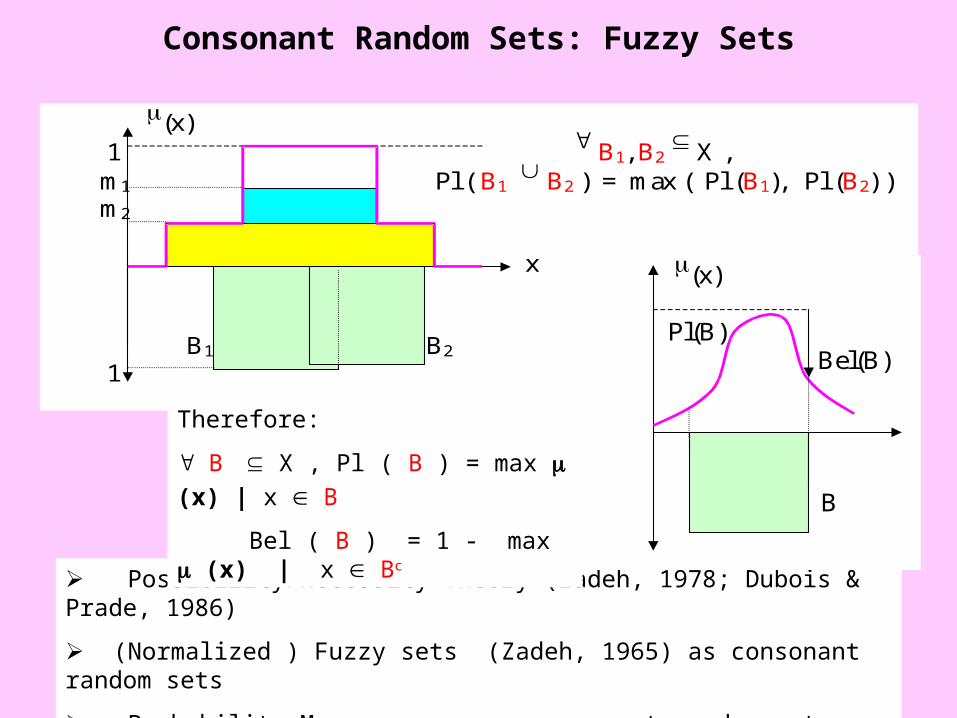
Consonant Random Sets: Fuzzy Sets
(x) 1 B1, B2 X , m1 Pl ( B1 B2 ) = max ( Pl (B1), Pl (B2) ) m2 x B1 B2 1
Possibility/Necessity Theory (Zadeh, 1978; Dubois & Prade, 1986)
(Normalized ) Fuzzy sets (Zadeh, 1965) as consonant random sets
Probability Measures as non-consonant random sets
Therefore:
B X , Pl ( B ) = max (x) | x B
Bel ( B ) = 1 - max (x) | x Bc
(x) Pl(B) Bel(B)
B

Random Set from a Fuzzy Set
(x) 1 = 1 A1
2 A2
3 = 0 x
A = x : (x) >
1 A =
2 A = A1 ; m(A1) = 1 - 2 = 1 - 2
3 A = A2 ;m(A2) = 2 - 3 = 3 ……….
i+1 A = Ai ; m(Ai) = i - i+1

3. Why Imprecise Probabilities in Engineering
Imprecise probabilities seem to be the natural consequence of set-valued measurements:
directly in real-world observations (for example geological or geo-mechanical surveys);
when we analyse statistical data trough histograms, even if the measurements are point-valued: the bars are in fact nothing else but non-overlapping focal elements.
when lack of direct experimental data forces us to resort to experts, each one giving imprecise measures (consonant or not-consonant)
Statistics from multi-choice questionnaire

4. Aggregation of different sources of information Set uncertainty - case 1 :AND
A B
C(A,B) = AB ( A AND B)
)(),(min)(
)(),(min)(
PPP
PPP
BAC
BAC
Notes:
1 – Total conflict (AB = ) – Total loss of information
2 – Partial conflict (AB ). Uncertainty decreases for the decision maker
3 – The rules works very well if AB and the sources of information for (A, B) are very reliable .

- case 2 : OR
A B
C(A,B) = AB ( A OR B)
)(),(max)(
)(),(max)(
PPP
PPP
BAC
BAC
Notes:
1 – Total conflict (AB = ) – No loss of information
2 – Partial conflict (AB ). Uncertainty increases for the decision maker
3 – The rule is reasonable when the sources of information for (A, B) are not very reliable .

- case 3 : Convolutive Averaging (X-Averaging)
A
B
If a distance d is defined in between points P or subsets:
C(A,B) = C | d(A, C) = d(C, B)
)(),(minsup)(
)(),(minsup)(
2
2
BBAAxx
x
C
BBAAxx
x
C
xxx
xxx
BA
BA
Notes:
1 – The rule in any case works and hides the conflict to the decision maker
In a vectorial Euclidean space X:

General properties of the rules and discussion
-Commutativity: C(A,B) = C(B,A)
-Associativity: C(A, C(B, D)= C(C(A,B), D)
-Idempotence : C(A, A) = A
Notes:
1 – Idempotence does not capture that our confidence in A grows with the repetitions.

Statistical aggregation and probability theory
Our confidence grows linearly with the number of repetitions of events (focal elements).
For n realisations of events in a finite space of events:
n
j
ijii n
XX
n
nXm
1
Notes:
1- Probabilities are obtained mixing (p-averaging) functions
2- Probabilities disclose the conflict to the decision maker (rule 2)
3- c-averaging of probability distributions (E[X]) hides the conflict

Aggregating probabilistic assignements (Rule 2)
For two assigned relative frequencies of events (focal elements):
/ ; / 2,221,11 nnXmnnXm iiii
21
,2,112 nn
nnXm ii
i
For infinite number of realisations, simply averaging:
2 21
12ii
i
XmXmXm
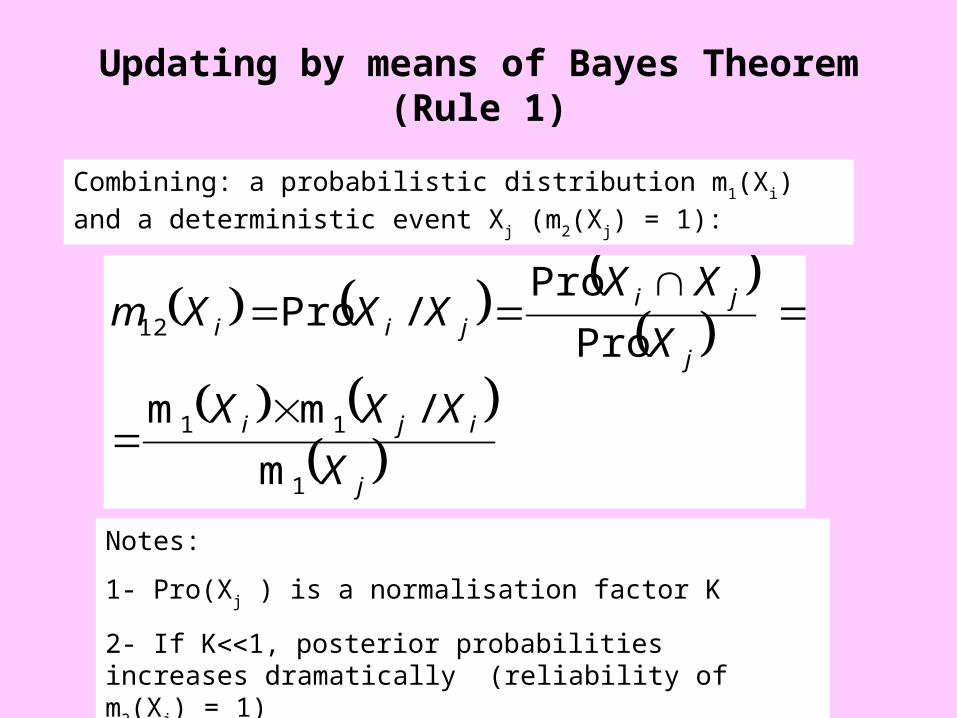
Updating by means of Bayes Theorem (Rule 1)
Combining: a probabilistic distribution m1(Xi) and a deterministic event
Xj (m2(Xj) = 1):
j
iji
j
jijii
X
XXX
X
XXXXXm
1
11
12
m
/mm
Pro
Pro /Pro
Notes:
1- Pro(Xj ) is a normalisation factor K
2- If K1, posterior probabilities increases dramatically (reliability of m2(Xj) = 1)
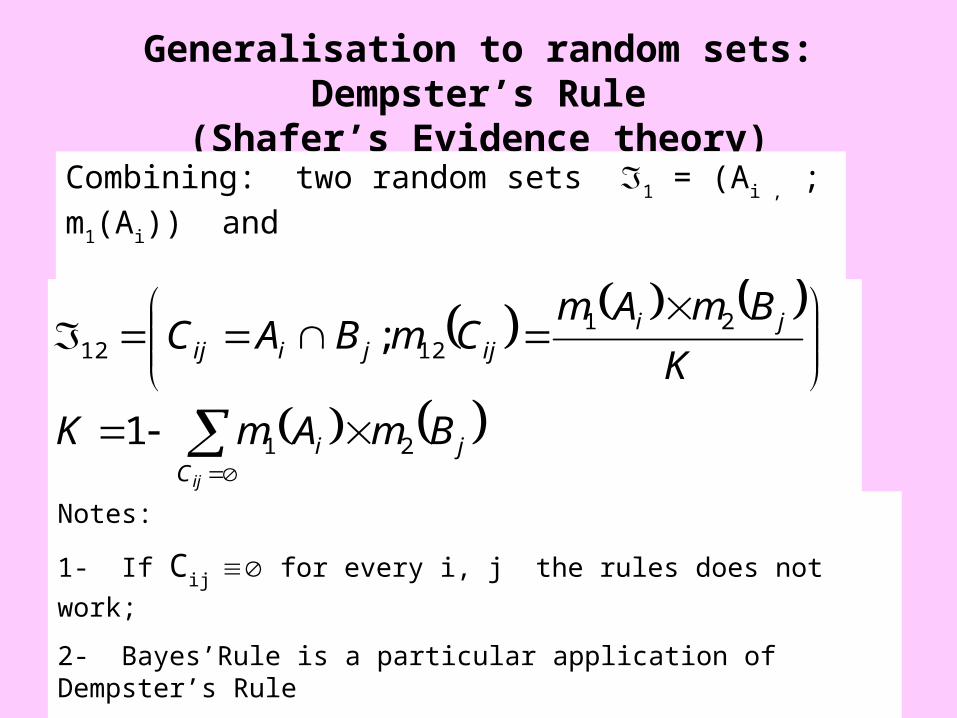
Generalisation to random sets: Dempster’s Rule(Shafer’s Evidence theory)
Combining: two random sets 1 = (Ai , ; m1(Ai)) and
2 = (Bj , ; m2(Bj)) :
ijCji
jiijjiij
BmAmK
K
BmAmCmBAC
21
211212
1
;
Notes:
1- If Cij for every i, j the rules does not work;
2- Bayes’Rule is a particular application of Dempster’s Rule
3- Combining two consonant random sets (two fuzzy sets) by means of Dempster’s Rule the resulting random sets is generally not consonant.

Criticism of Dempster’s Rule (Zadeh, 1984)
Combining two diagnosis about neurological symptoms in a patient: 1 = (A1 = {meningitis}; m1(A1) = 0.99),
(A2 = {brain tumor}; m1(A2) = 0.01) )
2 = (B1 = {concussion}; m2(A1) = 0.99),
(B2 = {brain tumor}; m2(A2) = 0.01) )
01.001.001.099.0299.099.01
101.001.0
;rbrain tumo 2212222212
K
KCmBAC
Therefore:
Bel({brain tumor})=Pro({brain tumor})=Pl({brain tumor})= 1

Yager’s Modified Dempster’s Rule (1987)
;
;;
212112
2112
12
ijCji
jiijjiij
BmAmmmm
BmAmCmBAC
1011;concussion r,brain tumo,meningitis
10101.001.0;rbrain tumo
412
422122222
12
m
CmBAC
Therefore: Bel({brain tumor})= 10-4 < Pro({brain tumor}) < Pl({brain tumor})= 1Bel({meningitis})= 0 < Pro({meningitis}) < Pl({meningitis})= 1- 10-4 Bel({concussion})= 0 < Pro({concussion}) < Pl({concussion})= 1- 10-4

Fuzzy composition of consonant random sets(Rule 1)
Given two fuzzy sets A, B
1=1
2
i
h(C)
k=0 x
)(),(min)( xxx BAC
k to2i:for
; 12112
12
iiiiiiii BmAmCmBAC
Let: Ai , Bi ; m1(Ai) = m2(Bi) = i-1 - i , i = 2 to k
their nested (strong) -cuts with the same probabilistic assignement:

Normalization of Fuzzy composition Rule
1=1
2
i
h(C)
k=0 x
Notes:
1-If AkBk = the rule does not
work
2- If A2B2 = C is subnormal
3- K=1-h(C) is the probability assignement of the empty set
Therefore two alternative rules can be used for normalization:
1
h(C) x
Dempster
1
1-h(C)
x
Yager
5. CONCLUSIONS
1) when information is affected by both randomness and imprecision, a reliability analysis can be conducted, taking into account the whole spectrum of uncertainty experienced in data collection. In this case imprecision leads to upper and lower bounds on the probability of an event of interest;
2) imprecision on basic parameters heavily has repercussions on the prediction of the behaviour of a construction, so that probabilistic analyses that ignore imprecision are meaningless, especially when very low probability of failure are calculated or required.
3) Three alternative basic rules has been identified for the aggregation of imprecise data: the subjective choice of the decision maker depend on the reliability of the available information and the aims of the analysis.
4) In the application of the “Intersection” rules attention should be given to the normalisation of the obtained probabilistic assignement: Yager’s modification of the Dempster’s rule seems to be reasonable in many cases