air muscles:-the neo pneumatic actuators
TRANSCRIPT
AIR MUSCLE

ABSTRACT Air muscle is essentially a robotic actuator
which is replacing the conventional pneumatic cylinders at a rapid pace. Due to their low production costs and very high power to weight ratio, as high as 400:1, the preference for Air Muscles is increasing. Air Muscles find huge applications in biorobotics and development of fully functional prosthetic limbs, having superior controlling as well as functional capabilities compared with the current models.

INTRODUCTION Robotic actuators conventionally are
pneumatic or hydraulic devices. Hydraulic devices have many inherent disadvantages like low operational flexibility, high safety requirements, and high cost operational as well as constructional etc. The search for an actuator which would satisfy all these requirements ended in Air Muscles. They are easy to manufacture, low cost and can be integrated with human operations without any large scale safety requirements. Further more they offer extremely high power to weight ratio of about 400:1. As a comparison electric motors only offer a power ration of 16:1. Air Muscles are also called McKibben actuators named after the researcher who developed it.
HISTORY It was in 1958 that R.H.Gaylord invented a pneumatic
actuator whose original applications included a door opening arrangement and an industrial hoist. Later in 1959 Joseph.L.McKibben developed Air Muscles. The source of inspiration was the human muscle itself, which would swell when a force has to be applied. They were developed for use as an orthotic appliance for polio patients. Clinical trials were realized in 1960s. These muscles were actually made from pure rubber latex, covered by a double helical weave (braid) which would contract when expanded radially. This could actually be considered as a biorobotics actuator as it operates almost similar to a biological muscle.


WORKING The inner rubber tube is inflated by entering
air at a pressure, usually limited to 3.5 bar. The movement of this tube is constrained by the braid. When the tube gets inflated it experiences a longitudinal contraction. This would create a pull at both ends of the tube. Usually one end of the tube will be attached to somewhere so that force can be applied from one end. This pull when effectively utilized could provide the necessary motion. The working of the Air Muscle closely resembles that of the natural muscle and hence the name Muscle given to it along with Air.

Air Muscle at different stages

Air muscles have performance characteristics very similar to human muscles- the force exerted decreases as the muscle contracts. This is due to the change in the interweave angle of the braided mesh as the muscle contracts- as the mesh expands radially in a scissors like motion it exerts less force due to the weave angle becoming increasingly shallow as the muscle contracts gas law states that if you increase pressure you also increase the volume of an expandable cylinder (provided temperature is constant.) The expanding volume of the bladder is ultimately constrained by the physical properties of the braided mesh sleeve so in order to create a greater pulling force you need to be able to increase the effective volume of the bladder- the pulling force of the muscle is a function of the length and diameter of the muscle as well as its ability to contract due to the properties of the mesh sleeve (construction material, number of fibers, interweave angle) and bladder material

DIFFERENCES FROM PNEUMATIC CYLINDERS
1. Smooth jerk free motion from start to finish due to the complete lack of stiction, the feature of standard actuators which produces the characteristic jerk so well known in air operated devices.
2. Compliance - Although they can produce the force needed to move a function the Air Muscle will also yield when an obstacle is encountered, thus preventing damage to the object and the "Arm" - a distinct advantage where robots mix with humans.
3. Light weight - The materials from which the Air Muscle is made are non-metallic and give it a relatively high power-to-weight ratio - a critical feature in choosing an actuator for a mobile robot

ADVANTAGES• Lightweight - Air Muscles weigh as little as 10 gm
- particularly useful for weight-critical applications
• Lower Cost - Air Muscles are cheaper to buy and install than other actuators and pneumatic cylinders
• Smooth - Air Muscles have no 'stiction' and have an immediate response. This results in smooth and natural movement.
• Flexible - Air Muscles can be operated when twisted axially, bent round a corner, and need no precise aligning.
• Powerful - Air Muscles produce an incredible force especially when fully stretched.
• Damped - Air Muscles are self-dampening when contracting (speed of motion tends to zero), and their flexible material makes them inherently cushioned when extending.
• Compliant - Being a soft actuator, Air Muscles systems are inherently compliant.
• Efficient - a muscle length can be maintained with minimal energy input.
• Fast -full contraction can be achieved in less than one second from rest.

DISADVANTAGES• The force which can be applied is only tensile in
nature. For both kinds of forces additional mechanisms are required.
• The efficiency of Air Muscles is not as good as electric motors
• Its total displacement is only about 20% to 30% of its initial length
• Friction between the netting and the tube leads to a substantial hysteresis in the force-length characteristics; this obviously has an adverse effect on actuator behavior and necessitates using complex models and control algorithms
• Rubber is often needed to avoid the tube from bursting, this comes at the cost of a high threshold pressure—typically about 90 kPa —that has to be overcome in order to start deforming the rubber material and below which the actuator will simply not operate
• Rubber deformation, like any material deformation, needs energy, this will lower the force output of this type of muscle up to 60%.
APPLICATIONS
•Humanoid Robots•Prosthetic Limbs•The Dextrous Hand
HUMANOID ROBOTS
The major application of Air Muscles is in the field of humanoid robots. As these actuators nearly resemble the characteristics of actual skeletal muscles, they can perform a verity of functions as is performed by the human hand. Coupled with the implementation of neural networks and powerful, precise sensors, they are capable of high end applications such as assembling of very minute components etc.
RIC90-Japan A Drone Bot –U.S. Army
ARTIFICIAL LIMB While some traditional prosthetic arms
move via myoelectric motors and relays, the Air Muscle Operated Limb is pneumatic, using compressed air to simulate the expansion and contraction of muscles. That air comes from a refillable tank located in the user's pocket, although there are plans to move it into the arm itself. The relatively simple technology keeps the production costs of the arm down to about a quarter of those for other functional prosthetic arms
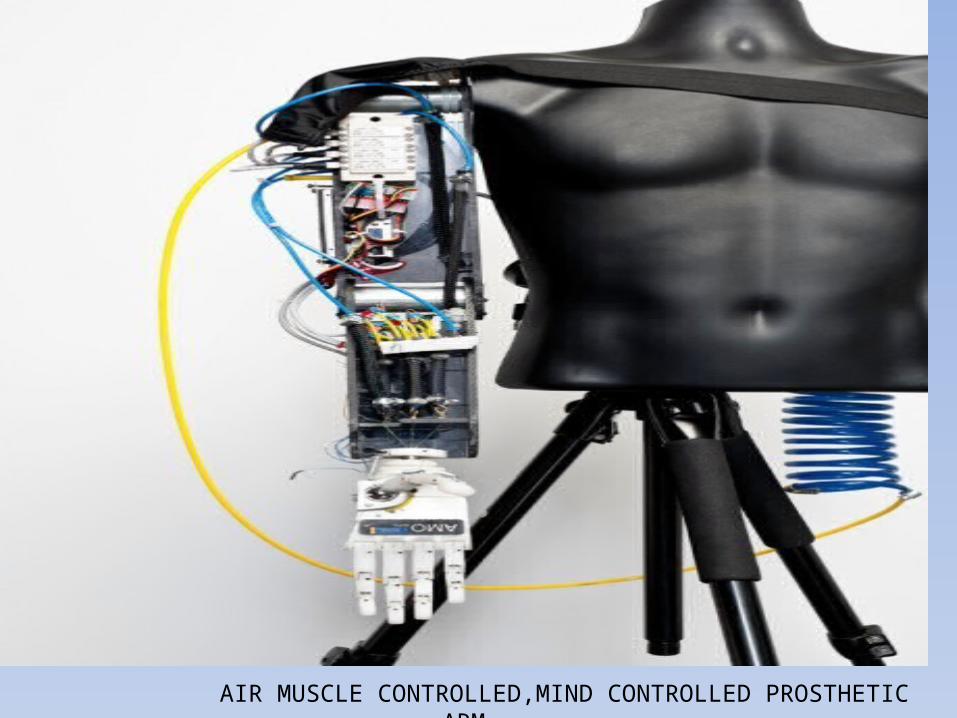
AIR MUSCLE CONTROLLED,MIND CONTROLLED PROSTHETIC ARM

DEXTEROUS HAND The dexterous hand was developed by the Shadow robotic
company. The hands operate just like human hands with five fingers. It is powered by 28 Air Muscles. The size is almost same as human hands as they closely fit into a human hand .The muscle can perform any function the human hand performs. Besides it is equipped to swivel its fingers. It makes use of 28 Air muscles for these movements. The human hand has 24 muscles. The additional four in case Dexterous hands due to the swiveling motion. The Shadow Dexterous Hand is a feat of miniaturisation. Within the same envelope as a human hand , there are packed highly sensed finger tips, position sensors for each joint and a control board on the palm allowing for system extension via add-ons. This increases operational capabilities significantly such as by wearing standard gloves for protection in specific tasks.

DEXTEROUS HAND

CONCLUSIONEven though Air Muscles are not capable of offering an extremely wide range of operations, but in the case of artificial legs, humanoid robots etc they offer a wide range of possibilities. With further developments in neural networks and sensor equipments, it might be possible to replace an entire limb for an amputee and function normally like a natural limb would do. The only draw back lies in developing a complete theoretical model for calculating the characteristics such as fatigue etc. Research is also directed towards substituting for Air with nitrogen or other gases for maximum efficiency and better damping.