alongi math 291-1 notes part 1
DESCRIPTION
Notes for the first quarter of Northwestern University's Math 291 sequence.TRANSCRIPT

MENU Intensive Linear Algebra
c�2013 John M. Alongi. All Rights Reserved.
September 22, 2013

2

Contents
1 Vectors 1
1.1 Geometric Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Rectangular Coordinate Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Coordinate Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4 The Vector Sum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.5 The Scalar-Vector Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.6 Lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.7 Planes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351.8 Linear Combinations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2 The Inner Product 47
2.1 The Inner Product: Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.2 The Inner Product: Definition and Properties . . . . . . . . . . . . . . . . . . . . . . 492.3 Norm and Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.4 Orthogonality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612.5 Orthogonal Decomposition and Orthogonal Projection . . . . . . . . . . . . . . . . . 632.6 The Cauchy-Schwarz Inequality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3 Systems of Linear Equations 75
3.1 Systems of Linear Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753.2 Matrices, Row Reduction and Echelon Forms . . . . . . . . . . . . . . . . . . . . . . 843.3 Solving Systems of Linear Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 923.4 Span . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1053.5 The Matrix-Vector Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1093.6 Solution Sets of Linear Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1143.7 Linear Independence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4 Linear Transformations 127
4.1 Linear Transformations: Definition and Properties . . . . . . . . . . . . . . . . . . . 1274.2 The Standard Matrix of a Linear Transformation . . . . . . . . . . . . . . . . . . . . 1374.3 The Algebra of Linear Transformations and Matrices . . . . . . . . . . . . . . . . . . 1404.4 Surjectivity and Injectivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1524.5 Invertibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
i
ii CONTENTS
5 Linear Spaces 173
5.1 Linear Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1735.2 Subspaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1795.3 Span . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1855.4 Linear Independence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1885.5 Bases and Dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1925.6 Linear Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2005.7 Images, Kernels, and Isomorphisms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2045.8 The Rank-Nullity Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2085.9 Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2105.10 Change of Basis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
A Foundations 223
A.1 Mathematical Induction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223A.2 The Real Number System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230A.3 The Complex Number System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
B Table of Equivalent Statements 245
C Answers to Selected Exercises 247
C.1 Chapter 1: Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247C.2 Chapter 2: Inner Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250C.3 Chapter 3: Systems of Linear Equations . . . . . . . . . . . . . . . . . . . . . . . . . 252C.4 Chapter 4: Linear Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257C.5 Chapter 5: Linear Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261C.6 Appendix A: Foundations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265

Acknowledgments
These notes accompany the course Math 291 Intensive Linear Algebra and Multivariable Calculuso↵ered at Northwestern University. Anna Marie Bohmann, Paul Goerss, Ben Weinkove, Eric Zaslowand Dylan Moreland suggested valuable mathematical and stylistic improvements. I am grateful tothe following students who diligently read the manuscript, o↵ered suggestions, and reported errors:Joseph Breen, Matthew Du, Alejandro Jensen, David Kim, Pallavi Pandey, Adam Ratner, ClaytonShuttleworth, Alberto Takase, Melody Xu,Yang Yu and Kevin Zhao. The responsibility for anyremaining errors is entirely my own.
John M. AlongiChicago, ILSeptember 2013
iii

iv CONTENTS

Chapter 1
Vectors
Vectors are fundamental to the study of linear algebra and multivariable calculus. In this chapterwe explore vectors from both geometric and coordinate viewpoints. The geometric perspectiveprovides intuition and motivation for the formal development in coordinates.
1.1 Geometric Vectors
Objective
• Provide an intuitive introduction to geometric vectors and vector operations.
Some physical quantities such as displacement, velocity, acceleration, force and momentumpossess a magnitude and a direction. We refer to such quantities as vector quantities. It is naturalto represent a vector quantity by a directed line segment (or arrow) whose length is proportionalto the magnitude of the vector quantity, and whose direction indicates the direction of the vectorquantity.
A geometric vector is a directed line segment. See Figure 1.1. We denote geometric vectorsby boldface letters such as a or by an arrow over a letter1 such as ~a. As a directed line segment,
Figure 1.1: A Geometric Vector
a geometric vector has an initial point A and a terminal point B. The notation��!AB specifies a
1Use arrows over letters when notating vectors by hand to distinguish vectors from other mathematical objects.
1
2 CHAPTER 1. VECTORS
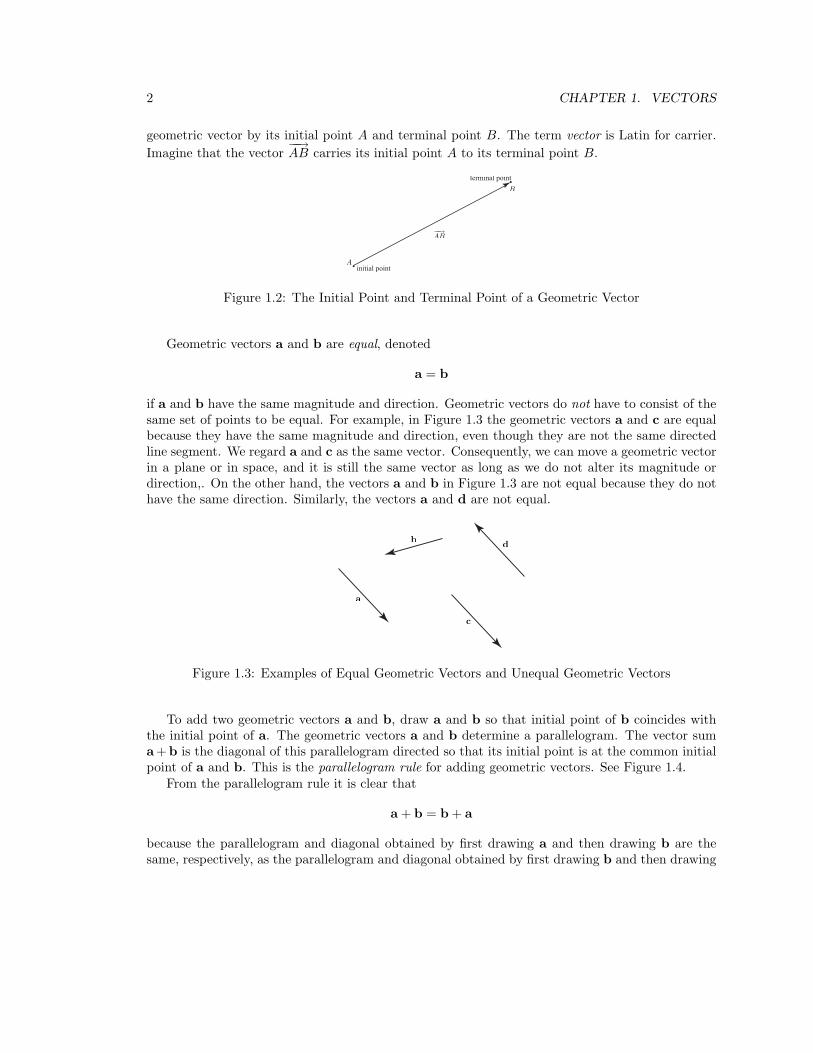
geometric vector by its initial point A and terminal point B. The term vector is Latin for carrier.Imagine that the vector
��!AB carries its initial point A to its terminal point B.
initial point
terminal point
A
B
��!AB
Figure 1.2: The Initial Point and Terminal Point of a Geometric Vector
Geometric vectors a and b are equal, denoted
a = b
if a and b have the same magnitude and direction. Geometric vectors do not have to consist of thesame set of points to be equal. For example, in Figure 1.3 the geometric vectors a and c are equalbecause they have the same magnitude and direction, even though they are not the same directedline segment. We regard a and c as the same vector. Consequently, we can move a geometric vectorin a plane or in space, and it is still the same vector as long as we do not alter its magnitude ordirection,. On the other hand, the vectors a and b in Figure 1.3 are not equal because they do nothave the same direction. Similarly, the vectors a and d are not equal.
a
b
c
d
Figure 1.3: Examples of Equal Geometric Vectors and Unequal Geometric Vectors
To add two geometric vectors a and b, draw a and b so that initial point of b coincides withthe initial point of a. The geometric vectors a and b determine a parallelogram. The vector suma+b is the diagonal of this parallelogram directed so that its initial point is at the common initialpoint of a and b. This is the parallelogram rule for adding geometric vectors. See Figure 1.4.
From the parallelogram rule it is clear that
a + b = b + a
because the parallelogram and diagonal obtained by first drawing a and then drawing b are thesame, respectively, as the parallelogram and diagonal obtained by first drawing b and then drawing

1.1. GEOMETRIC VECTORS 3
b
a
a + b
Figure 1.4: The Vector Sum: Parallelogram Rule
a. Because the sum of geometric vectors is independent of the order of the vectors, we say that thevector sum is commutative.
Alternatively, to add the geometric vectors a and b, draw a and b so that the initial point of b
coincides with the terminal point of a. The vector sum a+b is the vector whose initial point is theinitial point of a and whose terminal point is the terminal point of b. The vectors a,b and a + b
form the sides of a triangle. This is the triangle rule for adding geometric vectors. See Figure 1.5.Comparing Figures 1.4 and 1.5 we see that the triangle rule and the parallelogram rule produce the
a
b
a + b
Figure 1.5: The Vector Sum: Triangle Rule
same vector sum a + b.Using the triangle rule, notice that
(a + b) + c = a + (b + c)
See Figure 1.6. Because the sum of geometric vectors is independent of the grouping of the vectors,we say that the vector sum is associative.
For each geometric vector a we denote the geometric vector with same magnitude as a but inthe opposite direction from a by �a. The vector di↵erence of a and b is the geometric vector
a� b
def= a + (�b)
To subtract b from a, draw �b and add a to �b using the parallelogram rule. See Figure 1.7. Theinitial point of a � b is the terminal point of b, and the terminal point of a � b is the terminalpoint of a.

4 CHAPTER 1. VECTORS
a
b
a + b
c
a + (b + c)b + c
(a + b) + c =
Figure 1.6: Associativity of the Vector Sum
a� b
a� b
�b
a
b
Figure 1.7: The Vector Di↵erence
For the purposes of this section a scalar is a real number. (In Section 1.3 we formally define theterm scalar in a way that allows complex numbers to be scalars under some circumstances.) Wedenote scalars by letters in regular or italic font such as k.
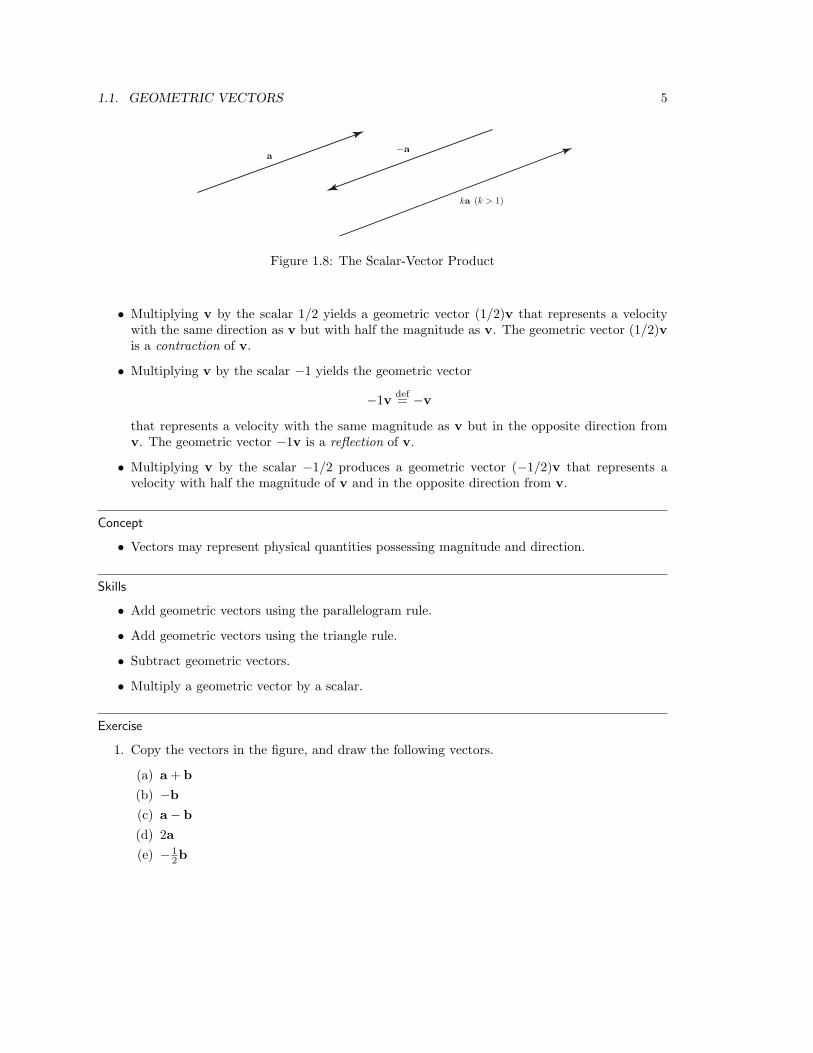
To multiply a geometric vector a by a scalar k, draw a. If |k| � 1, then expand the magnitudeof a by a factor of |k|. If |k| < 1, then contract the magnitude of a by a factor of k. If k < 0,then reverse the direction of a. The scalar-vector product of k with a is the geometric vector kaobtained from this procedure. See Figure 1.8.
Scalars arise in at least two ways. First, a scalar may describe a physical quantity such asdistance, speed, mass, charge and temperature that possesses a magnitude but not a direction. Inparticular, the magnitude of the geometric vector is a scalar.
Second, a scalar may express the expansion, contraction, reflection or a combination of anexpansion/contraction and a reflection of a geometric vector. For example, represent a nonzerovelocity by a geometric vector v.
• Multiplying v by the scalar 2 produces a geometric vector 2v that represents a velocity withthe same direction as v but with twice the magnitude as v. The geometric vector 2v is anexpansion of v.
1.1. GEOMETRIC VECTORS 5
a
ka
�a
(k > 1)
Figure 1.8: The Scalar-Vector Product
• Multiplying v by the scalar 1/2 yields a geometric vector (1/2)v that represents a velocitywith the same direction as v but with half the magnitude as v. The geometric vector (1/2)vis a contraction of v.
• Multiplying v by the scalar �1 yields the geometric vector
�1v def= �v
that represents a velocity with the same magnitude as v but in the opposite direction fromv. The geometric vector �1v is a reflection of v.
• Multiplying v by the scalar �1/2 produces a geometric vector (�1/2)v that represents avelocity with half the magnitude of v and in the opposite direction from v.
Concept
• Vectors may represent physical quantities possessing magnitude and direction.
Skills
• Add geometric vectors using the parallelogram rule.
• Add geometric vectors using the triangle rule.
• Subtract geometric vectors.
• Multiply a geometric vector by a scalar.
Exercise
1. Copy the vectors in the figure, and draw the following vectors.
(a) a + b
(b) �b
(c) a� b
(d) 2a(e) � 1
2b
6 CHAPTER 1. VECTORS
a
b
Figure 1.9: Vectors for Exercise 1
1.2 Rectangular Coordinate Systems
Objective
• Develop rectangular coordinate systems on lines and planes and in space.
A coordinate system uses numbers to uniquely determine the position of a point in a geomet-ric object such as a line, a plane, or space. Coordinates allow us to describe geometric problemsalgebraically and vice versa. In this section we provide an intuitive introduction to rectangular coor-dinate systems. A formal treatment of coordinates appears in Section 5.9. Later we study nonlinearcoordinate systems such as polar coordinates, cylindrical coordinates and spherical coordinates.
1.2.1 Rectangular Coordinates on a Line
We begin by establishing a one-to-one correspondence between the set of points on any line andthe set R of real numbers. A one-to-one correspondence between a line l and R is a relation thatassociates exactly one real number to each point of l and associates exactly one point of l to eachreal number.
Consider a line l. Choose a point O on l called the origin of the coordinate system. The pointO separates the line l into two rays. Choose one of the rays to be the positive ray of l and the otherto be the negative ray of l. There are two ways of choosing which ray is positive, each called anorientation of l. Choose a point I on the positive ray to represent a unit length on the line. SeeFigure 1.10.
Ol
I
Figure 1.10: A Rectangular Coordinate System on a Line
To assign a unique real number to each point, let P be a point on l. There exists a real numbera such that ��!
OP = a�!OI
Define the coordinate of P to be a if P lies on the positive ray of l and �a if P lies on the negativeray of l.

1.2. RECTANGULAR COORDINATE SYSTEMS 7
To assign a unique point to each real number, let a 2 R. If a � 0, then define P to be thepoint on the positive ray of l such that
��!OP = a
�!OI. If a < 0, then define P to be the point on the
negative ray of l such that��!OP = |a|�!OI. See Figure 1.11.
la
O P
Figure 1.11: A Coordinate Correspondence on a Line
1.2.2 Rectangular Coordinates on a Plane
Next, we establish a one-to-one correspondence between the set of points in any plane and the setR2 of ordered pairs of real numbers. Symbolically,
R2 def= {(a1, a2) : a1, a2 2 R}
Consider a plane P. Choose a point O in P called the origin of the coordinate system. Choosetwo perpendicular lines in P intersecting at O called the coordinate axes of the coordinate sys-tem. Choose an orientation and a unit of length for each axis so that each axis is in one-to-onecorrespondence with the set of real numbers as in Subsection 1.2.1.
There are two possible orders for the coordinate axes. Choose an order for the coordinate axes,calling the first axis the x-axis and calling the second axis the y-axis. Each order of the coordinateaxes is an orientation of the plane. If rotating the positive ray of the x-axis by 90� counterclockwisetransforms the positive ray of the x-axis into the positive ray of the y-axis, then the orientation ispositive. If rotating the positive ray of the x-axis by 90� clockwise transforms the positive ray ofthe x-axis into the positive ray of the y-axis, then the orientation is negative.
The coordinate axes separate the plane into four regions called quadrants. We usually labelquadrants with Roman numerals I, II, III and IV, starting in the quadrant bounded by the positiverays of the x- and y- axes and proceeding counterclockwise. See Figure 1.12.
To assign a unique ordered pair of real numbers to each point P in P, construct a line throughP perpendicular to the x-axis. Let a1 be the coordinate of the intersection of this line with thex-axis. Construct a line through P perpendicular to the y-axis. Let a2 be the coordinate of theintersection of this line with the y-axis. The ordered pair (a1, a2) corresponds to the point P .
To assign a unique point to each ordered pair (a1, a2) 2 R2, let Q be the point with coordinatea1 on the x-axis. Let R be the point with coordinate a2 on the y-axis. Construct a line m throughQ perpendicular to the x-axis, and construct a line n through R perpendicular to the y-axis. Thelines m and n intersect at a unique point P . The point P corresponds to the ordered pair (a1, a2).See Figure 1.13.
A rectangular coordinate system in the plane is often called a Cartesian coordinate system inhonor of the French philosopher, mathematician and writer Rene Descartes.2
2Rene Descartes (1596–1650), the ‘Father of Modern Philosophy,’ is perhaps best known for his statement, “Cogitoergo sum” (English: I think, therefore I am).

8 CHAPTER 1. VECTORS
O x
y
P
III
III IV
Figure 1.12: A Rectangular Coordinate System on a Plane
a1
a2
(a1, a2)
O
P
x
y
Q
R
Pm
n
Figure 1.13: A Coordinate Correspondence on a Plane
1.2.3 Rectangular Coordinates in Space
Finally, we define a one-to-one correspondence between the set of points in space and the R3 ofordered triples of real numbers. Symbolically,
R3 def= {(a1, a2, a3) : a1, a2, a3 2 R}
Choose a point O in space called the origin of the coordinate system. Choose three mutuallyperpendicular lines in space intersecting at O called the coordinate axes of the coordinate system.Choose a unit of length and an orientation for each axis. Each pair of coordinate axes determines acoordinate plane of the coordinate system. Each coordinate plane is in one-to-one correspondencewith R2 as in Subsection 1.2.2.
There are eight possible orders for the coordinate axes. Choose an order for the coordinateaxes, calling the first axis the x-axis, calling the second axis the y-axis, and calling the third axis
1.2. RECTANGULAR COORDINATE SYSTEMS 9
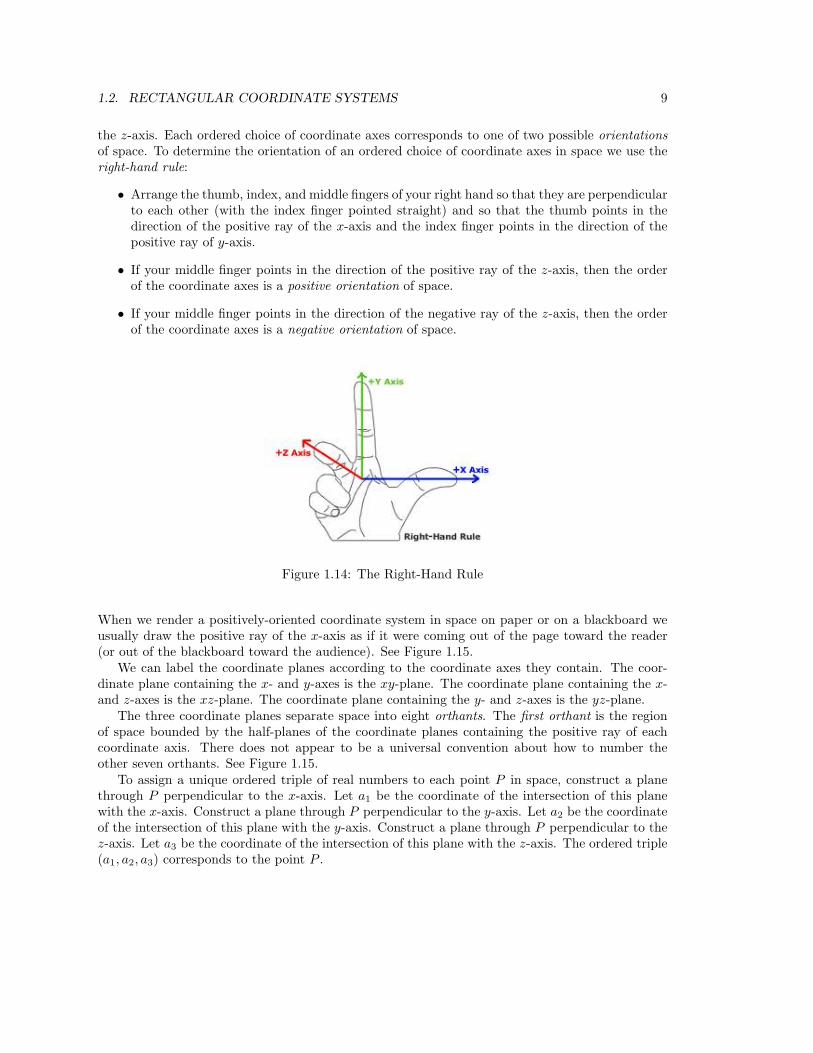
the z-axis. Each ordered choice of coordinate axes corresponds to one of two possible orientationsof space. To determine the orientation of an ordered choice of coordinate axes in space we use theright-hand rule:
• Arrange the thumb, index, and middle fingers of your right hand so that they are perpendicularto each other (with the index finger pointed straight) and so that the thumb points in thedirection of the positive ray of the x-axis and the index finger points in the direction of thepositive ray of y-axis.
• If your middle finger points in the direction of the positive ray of the z-axis, then the orderof the coordinate axes is a positive orientation of space.
• If your middle finger points in the direction of the negative ray of the z-axis, then the orderof the coordinate axes is a negative orientation of space.
Figure 1.14: The Right-Hand Rule
When we render a positively-oriented coordinate system in space on paper or on a blackboard weusually draw the positive ray of the x-axis as if it were coming out of the page toward the reader(or out of the blackboard toward the audience). See Figure 1.15.
We can label the coordinate planes according to the coordinate axes they contain. The coor-dinate plane containing the x- and y-axes is the xy-plane. The coordinate plane containing the x-and z-axes is the xz-plane. The coordinate plane containing the y- and z-axes is the yz-plane.
The three coordinate planes separate space into eight orthants. The first orthant is the regionof space bounded by the half-planes of the coordinate planes containing the positive ray of eachcoordinate axis. There does not appear to be a universal convention about how to number theother seven orthants. See Figure 1.15.
To assign a unique ordered triple of real numbers to each point P in space, construct a planethrough P perpendicular to the x-axis. Let a1 be the coordinate of the intersection of this planewith the x-axis. Construct a plane through P perpendicular to the y-axis. Let a2 be the coordinateof the intersection of this plane with the y-axis. Construct a plane through P perpendicular to thez-axis. Let a3 be the coordinate of the intersection of this plane with the z-axis. The ordered triple(a1, a2, a3) corresponds to the point P .

10 CHAPTER 1. VECTORS
x
y
z
O
first octant
Figure 1.15: A Rectangular Coordinate System in Space
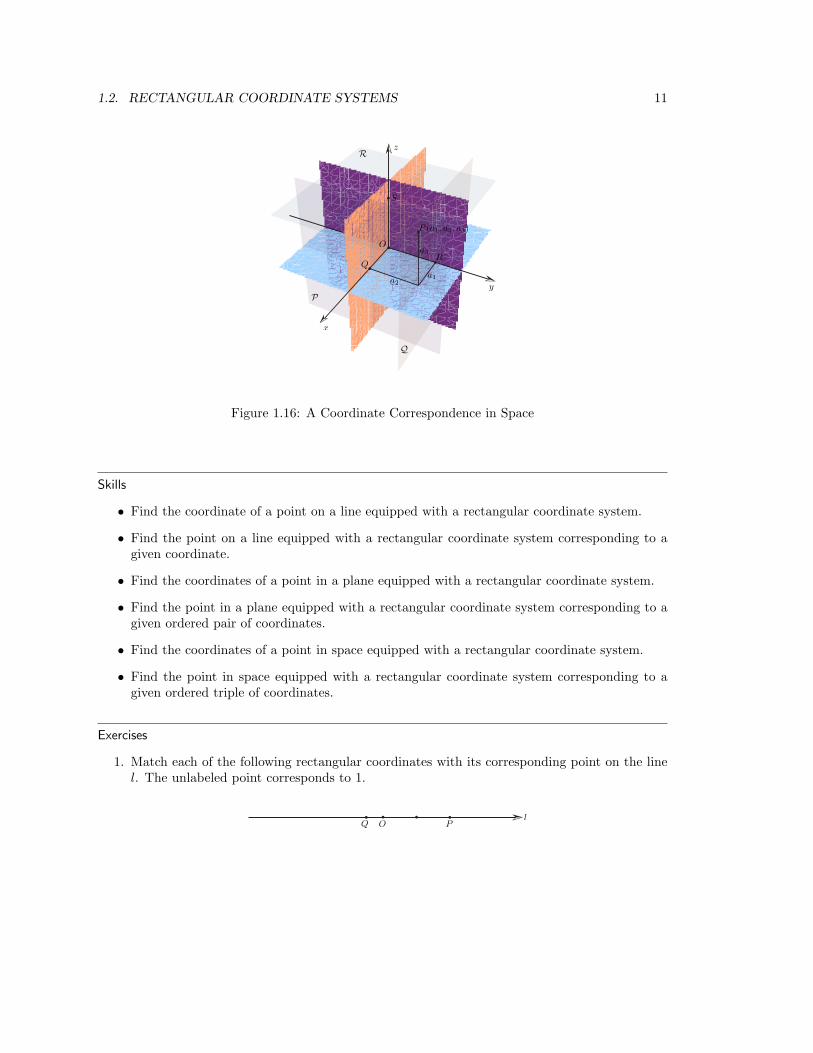
To assign a unique point to each ordered triple (a1, a2, a3) 2 R3, let Q be the point withcoordinate a1 on the x-axis. Let R be the point with coordinate a2 on the y-axis. Let S be apoint with coordinate a3 on the z-axis. Construct a plane P through Q perpendicular to the x-axis, construct a plane Q through R perpendicular to the y-axis, and construct a plane R throughS perpendicular to the z-axis . The planes P, Q and R intersect at a point P . The point Pcorresponds to the ordered triple (a1, a2, a3). See Figure 1.16.
Terms
• origin
• positive ray
• negative ray
• orientation
• coordinate axes
• coordinate planes
Concepts
• The set of real numbers is in one-to-one correspondence with the points on a line.
• The set of ordered pairs of real numbers is in one-to-one correspondence with the points in aplane.
• The set of ordered triples of real numbers is in one-to-one correspondence with the points inspace.
1.2. RECTANGULAR COORDINATE SYSTEMS 11
x
y
z
a2a1
a3
(a1, a2, a3)P
QR
S
P
Q
R
O
Figure 1.16: A Coordinate Correspondence in Space
Skills
• Find the coordinate of a point on a line equipped with a rectangular coordinate system.
• Find the point on a line equipped with a rectangular coordinate system corresponding to agiven coordinate.
• Find the coordinates of a point in a plane equipped with a rectangular coordinate system.
• Find the point in a plane equipped with a rectangular coordinate system corresponding to agiven ordered pair of coordinates.
• Find the coordinates of a point in space equipped with a rectangular coordinate system.
• Find the point in space equipped with a rectangular coordinate system corresponding to agiven ordered triple of coordinates.
Exercises
1. Match each of the following rectangular coordinates with its corresponding point on the linel. The unlabeled point corresponds to 1.
lO PQ
12 CHAPTER 1. VECTORS
(a) 2(b) �1/2
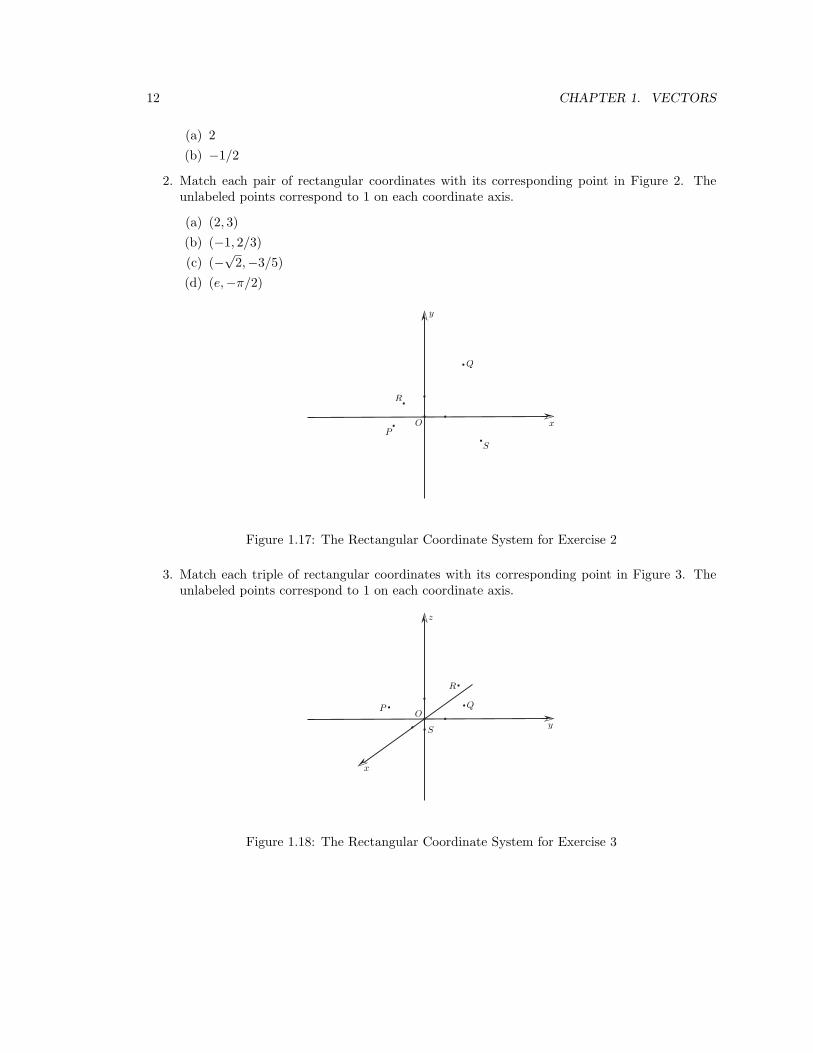
2. Match each pair of rectangular coordinates with its corresponding point in Figure 2. Theunlabeled points correspond to 1 on each coordinate axis.
(a) (2, 3)(b) (�1, 2/3)(c) (�p2,�3/5)(d) (e,�⇡/2)
OP
x
y
Q
R
S
Figure 1.17: The Rectangular Coordinate System for Exercise 2
3. Match each triple of rectangular coordinates with its corresponding point in Figure 3. Theunlabeled points correspond to 1 on each coordinate axis.
OP
x
y
Q
R
S
z
Figure 1.18: The Rectangular Coordinate System for Exercise 3

1.3. COORDINATE VECTORS 13
(a) (1, 2, 3)
(b) (0, 0,�1/2)
(c) (�2, ⇡/2, 0)
(d) (2,�3/5, e)
4. Draw a rectangular coordinate system on a line, and plot the points with the following rect-angular coordinates.3
(a) �2/3
(b) ⇡
5. Draw a rectangular coordinate system on a plane, and plot the points with the followingrectangular coordinates.
(a) (1, 1)
(b) (2, 0)
(c) (0,�3)
(d) (�1/2,p
3)
6. Draw a rectangular coordinate system in space, and plot the points with the following rect-angular coordinates.
(a) (1, 1, 1)
(b) (2, 3, 0)
(c) (0, 0, 1)
(d) (0,�2,�3)
7. Identify each of the rectangular coordinate systems in Figure 7 as positively oriented ornegatively oriented.
8. Identify each of the rectangular coordinate systems in Figure 8 as positively oriented ornegatively oriented.
1.3 Coordinate Vectors
Objective
• Define coordinate vectors, scalars, components of a vector, and equality of vectors.
In this we section we begin the formal development of vectors and scalars using the intuitiongained in the previous two sections about geometric vectors and rectangular coordinate systems.
3Use a straightedge when drawing figures.

14 CHAPTER 1. VECTORS
Ox
y
Ox
y
O x
y
(a) (b)
(c)
Figure 1.19: The Rectangular Coordinate Systems for Exercise 7
For each positive integer n denote the set of n-tuples of real numbers by Rn, and denote the setof n-tuples of complex numbers by Cn. Symbolically,
Rn
def= {(a1, . . . , an
) : a1, . . . , an
2 R}and
Cn
def= {(a1, . . . , an
) : a1, . . . , an
2 C}Throughout this text it is convenient to define terms and state theorems in a way that makes
sense for both real numbers and complex numbers simultaneously. We use the symbol F to representeither R or C when a term or theorem applies when replacing F by R and when replacing F by C.
Definition 1.3.1. A scalar is an element of F.
Definition 1.3.2. Let n be a positive integer. Define
Fn
def= {(a1, . . . , an
) : a1, . . . , an
2 F}A coordinate vector (or vector) is an element of Fn.
We denote vectors by boldface letters. For example, we might define a coordinate vector a inFn by
a
def= (a1, . . . , an
)

1.3. COORDINATE VECTORS 15
O
x
y
z
(a)
O
x
y
z
O
x
y
z
O
x
y
z
O
x
y
z
O
x
y
z
(b) (c)
(d) (e) (f)
Figure 1.20: The Rectangular Coordinate Systems for Exercise 8
Often it is useful to regard a as a column such as2
64a1...
an
3
75
Example 1.3.3.
(a) (0,�1, 2/3,p
5) is a vector in R4.
(b)
1i
�is a vector in C2.
We use n-tuple notation when interpreting vectors geomtetically as points, and we use columnnotation when interpreting vectors geometrically as directed line segments. Because it is useful todistinguish between rows and columns, the notation a will not denote a row such as
⇥a1 · · · a
n
⇤.
Definition 1.3.4. The components of a vector a
def= (a1, . . . , an
) are the scalars a1, . . . , an
.
Example 1.3.5. The components of the vector (1,�2, 3) in R3 are the real numbers 1, �2 and 3.
Two vectors are equal exactly when their corresponding components are equal.
Definition 1.3.6. Vectors a
def= (a1, . . . , an
) and b
def= (b1, . . . , bn
) in Fn are equal, denoted a = b,if a
j
= bj
for all j = 1, . . . , n.
16 CHAPTER 1. VECTORS
x
y
a1
a2(a1, a2)
Figure 1.21: A Vector in R2
x
ya1
a2
a3
z
(a1, a2, a3)
Figure 1.22: A Vector in R3
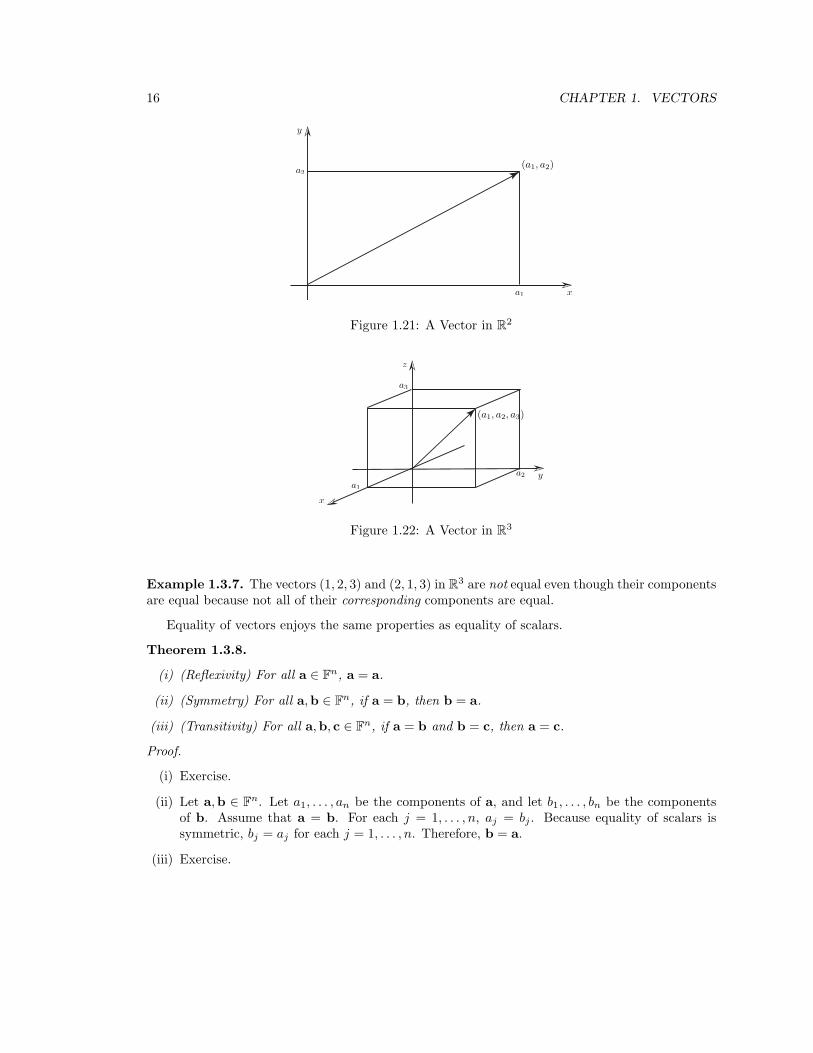
Example 1.3.7. The vectors (1, 2, 3) and (2, 1, 3) in R3 are not equal even though their componentsare equal because not all of their corresponding components are equal.
Equality of vectors enjoys the same properties as equality of scalars.
Theorem 1.3.8.
(i) (Reflexivity) For all a 2 Fn, a = a.
(ii) (Symmetry) For all a,b 2 Fn, if a = b, then b = a.
(iii) (Transitivity) For all a,b, c 2 Fn, if a = b and b = c, then a = c.
Proof.
(i) Exercise.
(ii) Let a,b 2 Fn. Let a1, . . . , an
be the components of a, and let b1, . . . , bn
be the componentsof b. Assume that a = b. For each j = 1, . . . , n, a
j
= bj
. Because equality of scalars issymmetric, b
j
= aj
for each j = 1, . . . , n. Therefore, b = a.
(iii) Exercise.

1.3. COORDINATE VECTORS 17
Terms
• scalar
• coordinate vector
• components
• equal vectors
Concepts
• Scalars are real or complex numbers.
• A coordinate vector is an n-tuple of scalars called the components of the coordinate vector.
• Two vectors are equal exactly when their corresponding components are equal.
Skills
• Use vector notation correctly.
• Identify the components of a coordinate vector.
• Interpret coordinate vectors geometrically as points and as directed line segments.
• Determine whether two coordinate vectors are equal.
Exercises
1. Draw a rectangular coordinate system on a plane, and draw the following vectors.
(a) (1, 1)(b) (0,�3)
(c)
20
�
(d) �1/2p
3
�
2. Draw a rectangular coordinate system in space, and draw the following vectors.
(a) (�1,�1,�1)(b) (2, 3, 0)
(c)
2
4001
3
5

18 CHAPTER 1. VECTORS
(d)
2
40�2
0
3
5
3. For what values of x and y is (0, x) = (ln y, 2)?
4. For what values of x, y and z is
2
4arctan y
1cos(⇡/6)
3
5 =
2
41ex
z
3
5?
5. Prove Theorem 1.3.8(i) and (iii).
1.4 The Vector Sum
Objective
• Develop the vector sum and its properties algebraically.
To add two vectors we add corresponding components.
Definition 1.4.1. The vector sum of a
def= (a1, . . . , an
) 2 Fn and b
def= (b1, . . . , bn
) 2 Fn is thevector
a + b
def= (a1 + b1, . . . , an
+ bn
)
The operation of forming the a vector sum is called vector addition.
Example 1.4.2.
(a) (1� 2i, 3i) + (�4 + 5i, 7) = (�3 + 3i, 7 + 3i)
(b)
2
40�1
⇡
3
5 +
2
4e
1/3p2
3
5 =
2
4e�2/3
⇡ +p
2
3
5Express the sum of an
n-tuple and a column
vector as an n-tuple.
(c) (2,�1) + �3
5
�= (�1, 4)
In Section 1.1 we introduced the sum of two geometric vectors intuitively using the parallelogramrule and the triangle rule. Figures 1.23 and 1.24 show that the formal definition of the vector sumin Definition 1.4.1 agrees with the parallelogram rule and the triangle rule., respectively.
The next theorem expresses the most important properties of the vector sum.
Theorem 1.4.3.
(i) (Commutativity) a + b = b + a for all a,b 2 Fn.
(ii) (Associativity) a + (b + c) = (a + b) + c for all a,b, c 2 Fn.
(iii) (Existence of a Unique Additive Identity) There is a unique vector 0 2 Fn such that a+0 = a
for all a 2 Fn.

1.4. THE VECTOR SUM 19
x
y
a1b1
a2
b2
a1 + b1
a2 + b2
a
b
a + b
Figure 1.23: The Vector Sum: Parallelogram Rule
x
y
a1
b1
a2
b2
a1 + b1
a2 + b2
a
b
a + b }}
Figure 1.24: The Vector Sum: Triangle Rule
(iv) (Existence of Unique Additive Inverses) For each a 2 Fn there is a unique vector �a 2 Fn
such that a + (�a) = 0.
Proof.
(i) Let a
def= (a1, . . . , an
) and b
def= (b1, . . . , bn
) be vectors in Fn.
a + b = (a1, . . . , an
) + (b1, . . . , bn
) Definitions of a and b
= (a1 + b1, . . . , an
+ bn
) Definition of the Vector Sum
= (b1 + a1, . . . , bn
+ an
) Commutativity of Addition of Scalars
= b + a Definition of the Vector Sum
(ii) Exercise.

20 CHAPTER 1. VECTORS
(iii) Let a
def= (a1, . . . , an
) be a vector in Fn. Define 0
def= (0, . . . , 0).
a + 0 = (a1, . . . , an
) + (0, . . . , 0) Definitions of a and 0
= (a1 + 0, . . . , an
+ 0) Definition of the Vector Sum
= (a1, . . . , an
) Additive Identity Property of Scalars
= a Definition of a
To prove that 0 is the unique vector with this property, assume that z 2 Fn and a + z = a
for all a 2 Fn. In particular,0 + z = 0
On the other hand, part (i) implies that
0 + z = z + 0 = z
Thus, z = 0. Therefore, 0 is the unique vector in Fn such that a + 0 = a for all a 2 Fn.
(iv) Exercise.
By the associativity of the vector sum (Theorem 1.4.3 (ii)) the meaning of the notation a+b+c
is unambiguous because the sum is the same no matter where we insert parentheses.
Theorem 1.4.4. (Generalized Associativity) For each integer p � 3,
a1 + (a2 + · · ·+ a
p
) = (a1 + · · ·+ a
p�1) + a
p
for all a1, . . . ,ap
2 Fn.
Proof. Exercise. Use the Principle of Mathematical Induction.
For all a1, . . . ,ap
2 Fn, the meaning of a1 + · · · + a
p
is unambiguous by Theorem 1.4.4. Thisjustifies the use of the summation notation
pX
j=1
a
j
def= a1 + · · ·+ a
p
Definition 1.4.5. The zero vector in Fn is the vector
0
def= (0, . . . , 0)
Definition 1.4.6. The vector di↵erence of a vector a 2 Fn and a vector b 2 Fn is the vector
a� b
def= a + (�b)
Express the difference
of two n-tuples as a
column vector and
express the difference of
an n-tuple and column
vector as an n-tuple.
Example 1.4.7.

1.4. THE VECTOR SUM 21
(a) (1,�2i, 3 + 4i)� (�4i, 0, 3) =
2
41 + 4i�2i4i
3
5
(b) (�1, 2)�
3�5
�= (�4, 7)
(c)
01
��
�23
�=
2�2
�
Using the vector di↵erence and a rectangular coordinate system we can represent a geometricvector by a coordinate vector. See Figure 1.25.
P1
P2���!P1P2
Figure 1.25: The Vector Between Two Points
Example 1.4.8. Represent the geometric vector���!P1P2 with initial point P1(2,�3) and terminal
point P2(�5, 7) by a coordinate vector.
Solution. Let p1def= (2,�3) and p2
def= (�5, 7) be the position vectors of the points P1 and P2,respectively. Represent the geometric vector
���!P1P2 by the vector di↵erence
p2 � p1 = (�5, 7)� (2,�3) = �7
10
�
N
Terms
• vector sum
• zero vector
• vector di↵erence
Concepts
• The vector sum is a commutative and associative operation.
• The vector sum has a unique identity called the zero vector.
• Every vector has a unique additive inverse.

22 CHAPTER 1. VECTORS
Skills
• Find the sum of two vectors.
• Find the di↵erence of two vectors.
• Draw a vector sum using the triangle rule and the parallelogram rule.
• Draw a vector di↵erence.
• Represent a geometric vector by a coordinate vector.
Exercises
1. Find each vector sum or di↵erence.
(a) (3, 1) + (�1, 7)
(b) (0,�1, 2) +
2
43/5⇡p7
3
5
(c)
2
664
1234
3
775 +
2
664
5�1
20
3
775
(d) (1� 2i, 3i) + (�5, 7 + 11i)(e) (1,�2)� (5/3, e)
(f) (1, 0, 2)�2
4217
3
5
(g) �i
2/3� ⇡i
��
5 + i
p13
0
�
2. Let a
def= (1, 2) and b
def= (�2, 5).
(a) Draw a + b using the triangle rule.(b) Draw a + b using the parallelogram rule.(c) Draw a� b.
3. Let n be a positive integer. Let a
def= (1, 3, 5, . . . , 2n� 1) and b
def= (2,�4, 6, . . . , (�1)n+12n).
(a) Find a + b.(b) Find a� b.
4. Represent the geometric vector���!P1P2 with initial point P1 and terminal point P2 by a coordi-
nate vector.

1.5. THE SCALAR-VECTOR PRODUCT 23
(a) P1(2, 4), P2(3, 9)
(b) P1(4,�1, 0), P2(3, 5, 3)
5. Justify each step in the following proof of Theorem 1.4.3 (ii).
Proof. Let a
def= (a1, . . . , an
),b def= (b1, . . . , bn
), and c
def= (c1, . . . , cn
) be vectors in Fn.
a + (b + c) = a + ((b1 + c1, . . . , bn
+ cn
)) Definition 1.4.1
= (a1 + (b1 + c1), . . . , an
+ (bn
+ cn
)) (a)
= ((a1 + b1) + c1, . . . , (an
+ bn
) + cn
)) (b)
= (a1 + b1, . . . , an
+ bn
) + c (c)
= (a + b) + c (d)
Therefore, for all a,b, c 2 Fn, a + (b + c) = (a + b) + c.
6. Prove Theorem 1.4.3 (iv).
7. Prove Theorem 1.4.4.
8. Prove that for all a,b, c 2 Fn, if a = b, then a + c = b + c and c + a = c + b.
9. Justify each step in the following proof that for all a,b 2 Fn, if a + b = a, then b = 0.
Proof. Let a,b 2 Fn. Assume that a + b = a.
a + b = a Hypothesis
�a + (a + b) = �a + a Exercise 8
(�a + a) + b = �a + a (a)
(a + (�a)) + b = a + (�a) Theorem 1.4.3 (i)
0 + b = 0 (b)
b + 0 = 0 (c)
b = 0 (d)
Therefore, for all a,b 2 Fn, if a + b = a, then b = 0.
1.5 The Scalar-Vector Product
Objective
• Develop the scalar-vector product and its properties algebraically.
• Define parallel vectors and the concept of direction using the scalar-vector product.

24 CHAPTER 1. VECTORS
Definition 1.5.1. The scalar-vector product of a scalar k and a vector a = (a1, . . . , an
) is thevector
kadef= (ka1, . . . , ka
n
)
The operation of forming the product of a scalar with a vector is called scalar multiplication.
Example 1.5.2.
(a) 3(1,�2) = (3,�6)
(b) �2
2
664
�13/5⇡
4� 7i
3
775 =
2
664
2�6/5�2⇡�8 + 14i
3
775
a1
a2
ka
ka1
ka2
x
y
a
Figure 1.26: The Scalar-Vector Product
Figure 1.26 shows that the formal definition of the scalar-vector product in Definition 1.5.1agrees with the intuitive approach to scalar multiplication in Section 1.1.
The next theorem establishes the most important properties of the scalar-vector product.
Theorem 1.5.3.
(i) (Associativity) For all a 2 Fn and all scalars k and l,
k(la) = (kl)a = l(ka)
(ii) (Existence of a Multiplicative Identity) For all a 2 Fn,
1a = a
(iii) (Distributivity of the Scalar-Vector Product over the Scalar Sum) For all a 2 Fn and allscalars k and l,
(k + l)a = ka + la

1.5. THE SCALAR-VECTOR PRODUCT 25
(iv) (Distributivity of the Scalar-Vector Product over the Vector Sum) For all a,b 2 Fn and allscalars k,
k(a + b) = ka + kb
Proof.
(i) Exercise.
(ii) Exercise.
(iii) Let a
def= (a1, . . . , an
) be a vector in Fn. Let k and l be scalars.
(k + l)a = ((k + l)a1, . . . , (k + l)an
) Definition of the Scalar-Vector Product
= (ka1 + la1, . . . , kan
+ lan
) Distributivity of Multiplication over Addition of Scalars
= (ka1, . . . , kan
) + (la1, . . . , lan
) Definition of the Vector Sum
= ka + la Definition of the Scalar-Vector Product
(iv) Let a
def= (a1, . . . , an
) and b
def= (b1, . . . , bn
) be vectors in Fn. Let k be a scalar.
k(a + b) = k((a1, . . . , an
) + (b1, . . . , bn
)) Definitions of a and b
= k(a1 + b1, . . . , an
+ bn
) Definition of the Vector Sum
= (k(a1 + b1), . . . , k(an
+ bn
)) Definition of the Scalar-Vector Product
= (ka1 + kb1, . . . , kan
+ kbn
) Distributivity of Multiplication over Addition of Scalars
= (ka1, . . . , kan
) + (kb1, . . . , kbn
) Definition of the Vector Sum
= ka + kb Definition of the Scalar-Vector Product
Theorem 1.5.4.
(i) For all a 2 Fn, 0a = 0.
(ii) For all scalars k, k0 = 0.
(iii) For all a 2 Fn, (�1)a = �a.
Proof.
(i) Exercise.
(ii) Exercise.
(iii) Let a
def= (a1, . . . , an
) be a vector in Fn.
a + (�1)a = ((a1, . . . , an
) + (�1a1, . . . ,�1an
)) Definition of the Scalar-Vector Product
= ((a1, . . . , an
) + (�a1, . . . ,�an
)) Additive Inverse Property of Scalars
= (a1 + (�a1), . . . , an
+ (�an
)) Definition of the Vector Sum
= (0, . . . , 0) Existence of Additive Inverses
= 0 Definition of the Zero Vector

26 CHAPTER 1. VECTORS
By Theorem 1.4.3 (iv) there is a unique vector �a 2 Fn so that a + (�a) = 0. Therefore,(�1)a = �a.
1.5.1 Parallel Vectors
Two vectors in Fn are parallel if one is a scalar multiple of the other.
Definition 1.5.5. Vectors a,b 2 Fn are parallel, denoted a k b, if there is a scalar k such that
b = ka or a = kb
Because 0 = 0a for all a 2 Fn, the zero vector in Fn is parallel to every vector in Fn.4
Definition 1.5.6. A vector a 2 Rn is in the direction of b 2 Rn if there is a nonnegative realscalar k such that
b = ka or a = kb
The zero vector in Rn is in the direction of every vector in Rn. If a is in the direction of b, thena is parallel to b. Notice that Definition 1.5.6 applies only to vectors with real components.
a
b
c
Figure 1.27: Parallel Vectors
In Figure 1.27 the vectors a, b and c are parallel to one another. However, a and b are in thesame direction while a and c are not in the same direction.
Example 1.5.7. The vectors a
def= (1, 2, 3) and b
def= (�2,�4,�6) in R3 are parallel because
(�2,�4,�6) = �2(1, 2, 3)
However, a is not in the direction of b.
The next proposition provides an important characterization of parallel vectors that we willgeneralize with our development of linear dependence in Chapter 3.
4Some texts define vectors to be parallel only if one of the vectors is a nonzero scalar multiple of the other. Sucha definition does not allow the zero vector to be parallel to any vector other than itself.

1.5. THE SCALAR-VECTOR PRODUCT 27
Proposition 1.5.8. Vectors a,b 2 Fn are parallel if and only if there are scalars k1 and k2 at leastone of which is nonzero such that
k1a + k2b = 0
Proof. Exercise.
Terms
• scalar-vector product
• parallel vectors
• vector in the direction of another
Concepts
• The scalar-vector product is an associative operation.
• The scalar-vector product has an identity element.
• The scalar-vector product distributes over both scalar addition and vector addition.
• Two vectors are parallel if one is a scalar multiple of the other.
• Two vectors are in the same direction if one is a nonnegative real scalar multiple of the other.
• Vectors a,b 2 Fn are parallel if and only if there are scalars k1 and k2 at least one of whichis nonzero such that
k1a + k2b = 0
Skills
• Find the product of a scalar with a vector.
• Represent the product of a scalar with a vector graphically.
• Determine whether two vectors are parallel.
• Determine whether a vector is in the direction of another.
Exercises
1. Find each scalar-vector product.
(a) 2(�3, 5)(b) � 2
3 (0,�1,p
5)
(c) ⇡
2
664
0�12/3p
5
3
775

28 CHAPTER 1. VECTORS
(d) i(1� 2i, 3i)
2. Simplify.
(a) (8, 9) + 3(�1, 2)
(b) 12 (8, 4, 1) + 2
2
45�71/4
3
5
(c) �2 ((2, 0, 1)� 6(1/2,�4, 1))
3. Let a
def= (1, 2).
(a) Draw 3a.
(b) Draw �3a.
(c) Draw 1a.
(d) Draw 0a.
4. Prove or disprove: If a 2 Fn, c 2 F and ca = a, then c = 1.
5. Prove Theorem 1.5.3 (i).
6. Justify each step in the following proof of Theorem 1.5.3 (ii).
Proof. Let a
def= (a1, . . . , an
) 2 Fn.
1a = (1a1, . . . , 1an
) (a)
= (a1, . . . , an
) (b)
= a Definition of a
Therefore, for all a 2 Fn, 1a = a.
7. Prove Theorem 1.5.4 (i).
8. Prove Theorem 1.5.4 (ii).
9. Determine whether each of the following statements is true or false. If the statement is true,then prove it. If the statement is false, then provide a counterexample. Let a, b and c bevectors in Fn.
(a) If a k b, then b k a.
(b) If a is in the direction of b, then b is in the direction of a.
(c) If a k b and b k c, then a k c.
(d) If a is in the direction of b, and b is in the direction of c, then a is in the direction of c.
10. Prove that (1, 2) and (5, 10) parallel vectors.

1.6. LINES 29
11. Let a,b 2 Fn. Prove that a k b if and only if either a = 0 or there exists a scalar k such thatb = ka.
12. Let a,b, c 2 Fn. Prove that if b is parallel to a and c is parallel to a, then b + c is parallelto a.
13. Prove Proposition 1.5.8.
1.6 Lines
Objectives
• Define lines and line segments in Fn.
• Develop vector equations, sets of parametric equations and standard linear equations for lines.
p
v
tv
p + tvl
Figure 1.28: A Line
Let v be a nonzero vector in R3. The set of all scalar multiples tv is what we intuitively call aline in R3.
Definition 1.6.1. The line l in Fn containing p 2 Fn and parallel to a nonzero vector v 2 Fn is
ldef= {x 2 Fn : x� p = tv for some scalar t}
Definition 1.6.2. A vector equation for a line in Fn containing p 2 Fn and parallel to anonzero vector v 2 Fn is
x� p = tv
for all scalars t.
Example 1.6.3. Find a vector equation for the line in R2 containing (1,�2) and parallel to
v =
3/5⇡
�.
Solution. A vector equation is
x� (1,�2) = t
3/5⇡
�
for all scalars t. N

30 CHAPTER 1. VECTORS
1.6.1 Parametric Equations for a Line
Let l be the line in Fn containing p 2 Fn and parallel to a nonzero vector v 2 Fn. A vectorx = (x1, . . . , , xn
) lies on the line l if and only if there is a scalar t so that
x� p = tv
Define p
def= (p1, . . . , pn
) and v
def=
2
64v1...
vn
3
75. Then the vector x lies on the line l if and only if there
is a scalar t so that
(x1, . . . , xn
)� (p1, . . . , , pn
) = t
2
64v1...
vn
3
75
2
64x1 � p1
...x
n
� pn
3
75 =
2
64tv1...
tvn
3
75
Since vectors are equal exactly when their corresponding components are equal,8><
>:
x1 � p1 = tv1...
xn
� pn
= tvn
Definition 1.6.4. Parametric equations for the line containing p
def= (p1, . . . , pn
) 2 Fn and
parallel to a nonzero vector v
def=
2
64v1...
vn
3
75 2 Fn are
8><
>:
x1 � p1 = tv1...
xn
� pn
= tvn
for all scalars t.
Example 1.6.5. Find parametric equations for a line in R2 containing (1,�2) and parallel to
v =
3/5⇡
�.
Solution. Parametric equations are⇢
x1 � 1 = 3t/5x2 + 2 = ⇡t
N

1.6. LINES 31
Example 1.6.6. Find parametric equations for a line in R3 containing (0,�1, 2) and (�3, 5,�7).
Solution. A nonzero vector parallel to the line is
(0,�1, 2)� (�3, 5,�7) =
2
43�6
9
3
5
Therefore, parametric equations for the line are8<
:
x = 3ty + 1 = �6tz � 2 = 9t
for all scalars t. N
Alternative Solution. Another nonzero vector parallel to the line is
(�3, 5,�7)� (0,�1, 2) =
2
4�3
6�9
3
5
Therefore, parametric equations for the line are8<
:
x + 3 = �3ty � 6 = 6tz + 9 = �9t
for all scalars t. N
Parametric equations for a line are never unique because you can choose any point on the lineand any vector parallel to the line to produce parametric equations for the line.
1.6.2 Linear Equations in Two Variables
Definition 1.6.7. A linear equation in two variables is an equation of the form
ax + by = c
where a, b and c are scalars so that either a or b is nonzero.
Example 1.6.8. Show that the set of (x, y) 2 R2 satisfying the linear equation
x� 2y = 3
is a line.
Solution. Solving x� 2y = 3 for x we obtain
x = 2y � 3
Define tdef= y. Then x = 2t� 3. Thus, parametric equations for the line are
⇢x� 3 = 2t
y = t
N

32 CHAPTER 1. VECTORS
Alternative Solution. Solve x� 2y = 3 for y to obtain
y = �12x +
32
Define tdef= x. Then y = � 1
2x + 32 . Thus, parametric equations for the line are
(x = t
y � 32
= �12t
for all scalars t. N
More generally, the set of vectors in a plane whose components satisfy a given standard linearequation
ax + by = c
is a line.
Theorem 1.6.9. For all scalars a, b and c so that a and b are not both zero, the set of vectors(x, y) in F2 whose components satisfy the linear equation
ax + by = c
is a line.
Proof. Let a, b and c be scalars so that a and b are not both zero.
Case I. a 6= 0
Solving ax + by = c for x we obtain
x =c
a� b
ay
Define tdef= y. Then the set of vectors (x, y) 2 F2 satisfying ax + by = c is exactly the set of vectors
that satisfy the set of parametric equations(
x� c
a= � b
at
y = t
for all scalars t.
Case II. a = 0
Because a and b are not both zero, b 6= 0. Solving ax + by = c for y we obtain
y =c
b

1.6. LINES 33
Define tdef= x. Then the set of vectors (x, y) 2 F2 satisfying ax + by = c is exactly the set of vectors
that satisfy the set of parametric equations(
x = t
y � c
b= 0
for all scalars t.
In each case the set of vectors (x, y) 2 F2 satisfying the linear equation ax + by = c satisfies aset of parametric equations for a line.
1.6.3 Line Segments
p
q
Figure 1.29: A Line Segment
Definition 1.6.10. The line segment � in Rn with endpoints p,q 2 Rn is
�def= {x 2 Rn : x� p = t(q� p) for some t 2 [0, 1]}
Example 1.6.11. Find a vector equation for the line segment in R3 with endpoints (0,�1, 2) and(�3, 5,�7). Specify the domain of the parameter in your parametric equations.
Solution. A nonzero vector parallel to the line segment is
(�3, 5,�7)� (0,�1, 2) =
2
4�3
6�9
3
5
Therefore, a vector equation for the line segment is
x� (0,�1, 2) = t
2
4�3
6�9
3
5
The domain of the parameter t is [0, 1]. N
Terms

34 CHAPTER 1. VECTORS
• line
• vector equation of a line
• parametric equations of a line
• linear equation in two variables
• line segment
Concept
• The line in Fn through p and parallel to a nonzero vector v is the set of vectors which di↵erfrom p by a scalar multiple of v.
Skills
• Find vector and parametric equations of the line containing p 2 Fn and parallel to a nonzerovector v 2 Fn.
• Find vector and parametric equations of a line containing p1 and p2 2 Fn.
• Find vector and parametric equations of a line in F2 given by a linear equation in two variables.
Exercises
1. Find vector and parametric equations for the line in R2 containing (2,�1) and parallel to17
�.
2. Find vector and parametric equations for the line in R3 containing (1, 4, 5) and (2, 4,�1).
3. Find vector and parametric equations for the line in R4 containing (1, 2, 0, 4) and parallel to2
664
�2537
3
775.
4. Find vector and parametric equations for the line in R5 containing (9, ⇡,�1, 5, 2) and (�1, 1,p
2, 7, 1).
5. Find two di↵erent sets of parametric equations for the line in R3 containing (�1, 7, 3) and
parallel to
2
42�1
5
3
5.
6. Find two di↵erent sets of parametric equations for the line in R3 containing (5,�3, 4) and(0, 1, 9).
7. Find vector and parametric equations for the lines in R2 with the following linear equationsin two variables.
1.7. PLANES 35
(a) 2x� 3y = 5(b) x = 1(c) 2y = 3
8. (a) Prove that for all real numbers m and b, the set of vectors (x, y) in R2 whose componentssatisfy the slope-intercept equation
y = mx + b
is a line.(b) Find vector and parametric equations for the line in R2 with slope-intercept form y =
2x� 3.
9. Find a vector equation for the line segment with endpoints (1, 3, 5) and (�2, 4,�6). Specifythe domain of the parameter in your parametric equations.
1.7 Planes
Objective
• Define planes and parallelograms in Fn algebraically, and obtain sets of parametric equationsand standard linear equations for planes.
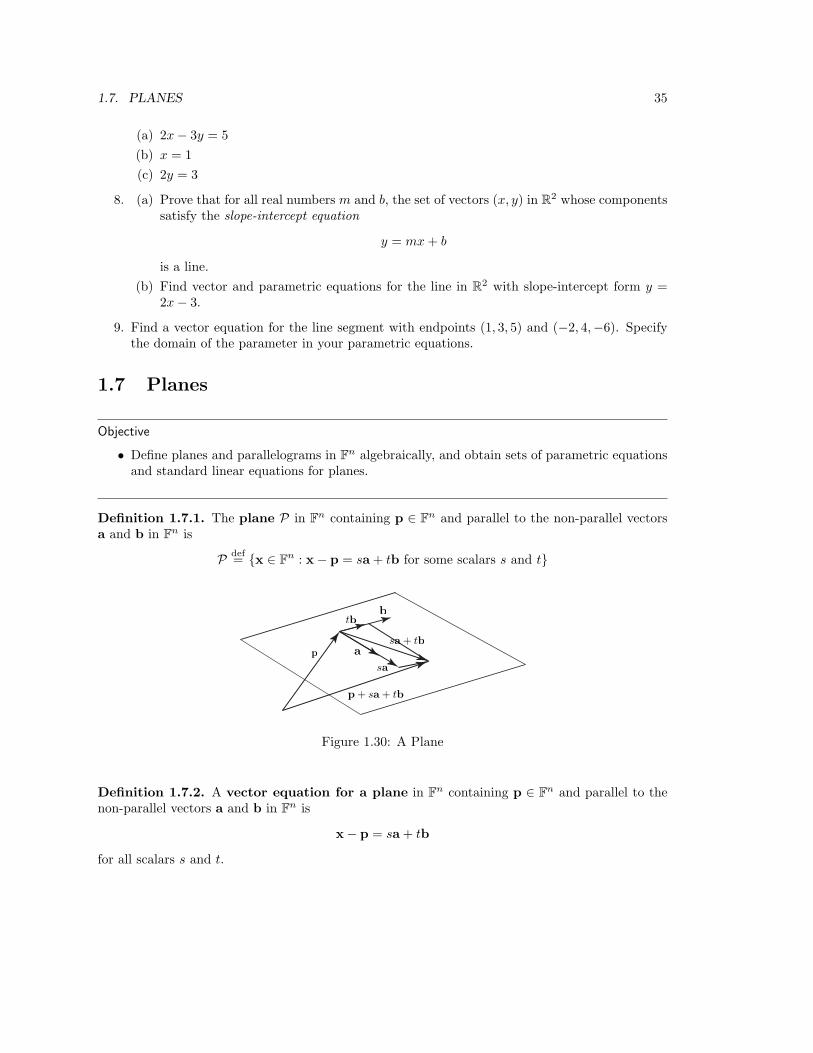
Definition 1.7.1. The plane P in Fn containing p 2 Fn and parallel to the non-parallel vectorsa and b in Fn is
P def= {x 2 Fn : x� p = sa + tb for some scalars s and t}
p
a
b
sa
tb
sa + tb
p + sa + tb
Figure 1.30: A Plane
Definition 1.7.2. A vector equation for a plane in Fn containing p 2 Fn and parallel to thenon-parallel vectors a and b in Fn is
x� p = sa + tb
for all scalars s and t.

36 CHAPTER 1. VECTORS
Example 1.7.3. Find a vector equation for the plane in R3 containing (1,�2, 3), (�4, 5,�6) and(7,�8, 9).
Solution. Two non-parallel vectors parallel to the plane are
(1,�2, 3)� (�4, 5,�6) =
2
45�7
9
3
5
and
(1,�2, 3)� (7,�8, 9) =
2
4�6
6�6
3
5
Therefore, a vector equation for the plane is
x� (1,�2, 3) = s
2
45�7
9
3
5 + t
2
4�6
6�6
3
5
for all scalars s and t. N
1.7.1 Parametric Equations for a Plane
Let P be the plane in Fn containing p 2 Fn and parallel to the non-parallel vectors a and b in Fn.A vector x
def= (x1, . . . , , xn
) lies in the plane P if and only if there are scalars s and t so that
x� p = sa + tb
Define p
def= (p1, . . . , pn
), a
def=
2
64a1...
an
3
75, and b
def=
2
64b1...
bn
3
75. Then the vector x lies in the plane P if
and only if there are scalars s and t so that
(x1, . . . , xn
)� (p1, . . . , , pn
) = s
2
64a1...
an
3
75 + t
2
64b1...
bn
3
75
2
64x1 � p1
...x
n
� pn
3
75 =
2
64sa1 + tb1
...sa
n
+ tbn
3
75
Since vectors are equal exactly when their corresponding components are equal,8><
>:
x1 � p1 = sa1 + tb1...
xn
� pn
= san
+ tbn

1.7. PLANES 37
Definition 1.7.4. Parametric equations for the plane in Fn containing p
def= (p1, . . . , pn
) 2 Fn
and parallel to the non-parallel vectors a
def=
2
64a1
...a
n
3
75 and b
def=
2
64b1...
bn
3
75 in Fn are
8><
>:
x1 � p1 = sa1 + tb1...
xn
� pn
= san
+ tbn
for all scalars s and t.
Example 1.7.5. Find parametric equations for the plane in R3 containing (1,�2, 3), (�4, 5,�6)and (7,�8, 9).
Solution. Two non-parallel vectors parallel to the plane are
(1,�2, 3)� (�4, 5,�6) =
2
45�7
9
3
5
and
(1,�2, 3)� (7,�8, 9) =
2
4�6
6�6
3
5
Therefore, parametric equations for the plane are8<
:
x� 1 = 5s� 6ty + 2 = �7s + 6tz � 3 = 9s� 6t
for all scalars s and t. N
Parametric equations for a line are never unique because you can choose any point on the planeand any pair of non-parallel vectors parallel to the plane to produce a set of parametric equationsfor the plane.
1.7.2 Linear Equations in Three Variables
Definition 1.7.6. A linear equation in three variables is an equation of the form
ax + by + cz = d
where a, b, c and d are scalars so that a, b and c are not all zero.
Example 1.7.7. Show that the set of (x, y, z) 2 R3 satisfying the equation
x� 2y + 3z = 5
is a plane.

38 CHAPTER 1. VECTORS
Solution. Solve x� 2y + 3z = 5 for any one of the variables in terms of the other two. Solving forx in terms of y and z,
x = 5 + 2y � 3z
Define sdef= y and t
def= z. Thenx� 5 = 2s� 3t
So, a set of parametric equations is8<
:
x� 5 = 2s� 3ty = sz = t
for all scalars s and t.Thus, the set of (x, y, z) 2 R3 that satisfy the linear equation x� 2y + 3z = 5 is exactly the set
of (x, y, z) that satisfy a set of parametric equations for a plane in R3. N
Theorem 1.7.8. For all scalars a, b, c and d such that a, b and c are not all zero, the set of vectors(x, y, z) in F3 whose components satisfy the linear equation
ax + by + cz = d
is a plane.
Proof. Exercise.
1.7.3 Parallelograms
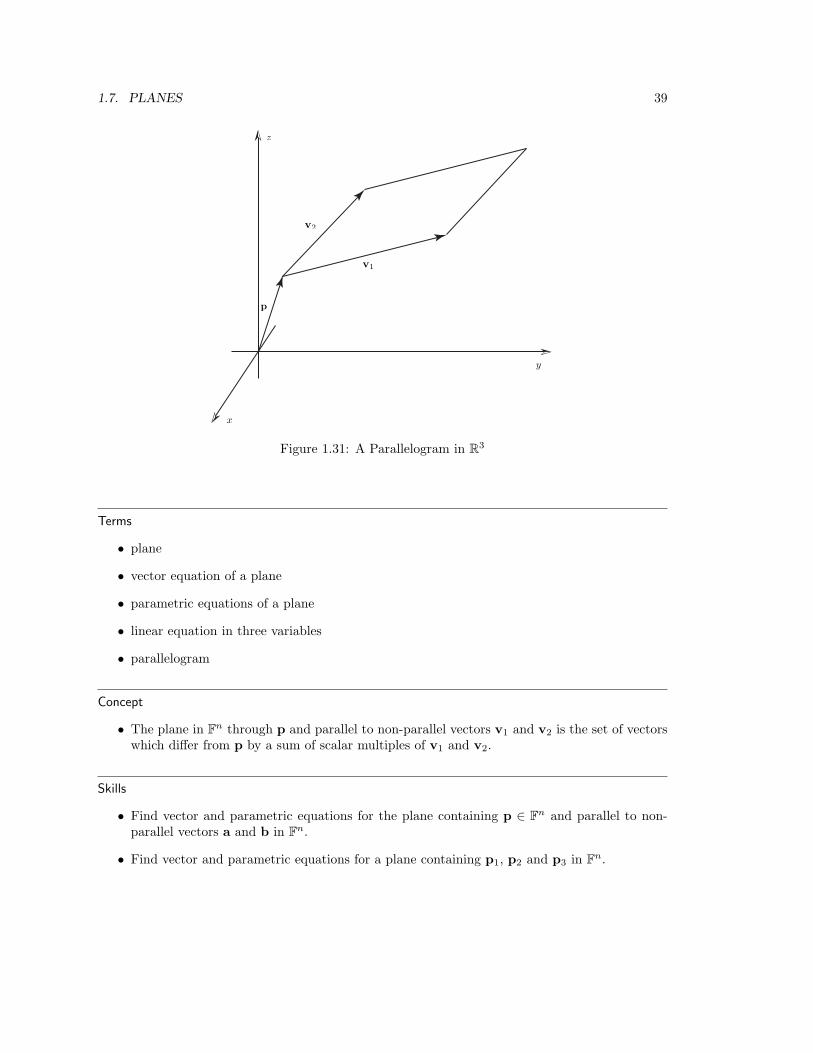
Definition 1.7.9. The parallelogram in Rn with vertex p 2 Rn and edges v1,v2 2 Rn is
Pdef= {x 2 Rn : x� p = sv1 + tv2 for some s, t 2 [0, 1]}
See Figure 1.31
Example 1.7.10. Find a vector equation for the parallelogram in R3 with vertex (2, 7, 6) and edges2
4255
3
5 and
2
4677
3
5. Specify the domain of each parameter in your vector equation.
Solution. The vertex of the parallelogram is (2, 7, 6). The edges of the parallelogram are2
4255
3
5 and
2
4677
3
5
Therefore, a vector equation for this parallelogram is
x� (2, 7, 6) = s
2
4255
3
5 + t
2
4677
3
5
The parameters are s and t. Each has domain [0, 1]. N
1.7. PLANES 39
p
v1
v2
x
y
z
Figure 1.31: A Parallelogram in R3
Terms
• plane
• vector equation of a plane
• parametric equations of a plane
• linear equation in three variables
• parallelogram
Concept
• The plane in Fn through p and parallel to non-parallel vectors v1 and v2 is the set of vectorswhich di↵er from p by a sum of scalar multiples of v1 and v2.
Skills
• Find vector and parametric equations for the plane containing p 2 Fn and parallel to non-parallel vectors a and b in Fn.
• Find vector and parametric equations for a plane containing p1, p2 and p3 in Fn.

40 CHAPTER 1. VECTORS
• Find vector and parametric equations for a plane in F3 given by a linear equation in threevariables.
Exercises
1. Find parametric equations for the plane in R3 containing the point (�1, 2, 7) and parallel to
the vectors
2
42�3
1
3
5 and
2
410�5
3
5.
2. Find vector and parametric equations for a plane in R3 containing (3,�1, 2), (2, 0, 5) and(1,�2,�4).
3. Find two di↵erent sets of parametric equations for a plane in R3 containing (1,�2, 3), (0,�5, 7)and (�8, 6,�4).
4. Find vector and parametric equations for planes in R3 with the following linear equations inthree variables.
(a) 2x� 3y + 5z = �7
(b) x� 2y = 1
(c) 3y � 5z = 1
(d) x� 5z = 1
(e) x = 1
(f) 2y = 3
(g) 3z = 5
5. (a) Prove Theorem 1.7.8.
(b) Find vector and parametric equations for a plane in R3 with standard linear equation
2x� 3y + 5z = 7
6. Find vector and parametric equations for the parallelogram in R3 with vertex (�1, 2,�3)
and edges
2
44�5
6
3
5 and
2
4�7
8�9
3
5. Specify the domain for each parameter in your parametric
equations.
1.8 Linear Combinations
Objective
• Introduce linear combinations of vectors in Fn and their elementary properties.

1.8. LINEAR COMBINATIONS 41
We have introduced two operations on vectors: addition and scalar multiplication. In theprevious two sections we defined lines and planes using vector addition and scalar multiplication.Vectors formed using only the operations of vector addition and scalar multiplication are calledlinear combinations. Linear algebra is the study of linear combinations.
Definition 1.8.1. A linear combination of vectors a1, . . . ,ap
2 Fn is a vectorpX
j=1
kj
a
j
where k1, . . . , kp
are scalars called the coe�cients
5 of the linear combination.
Example 1.8.2. The vector
8�4
�is a linear combination of the vectors
1�2
�and
31
�
because 8�4
�= 3
1�2
�+ 2
31
�
See Figure 1.32.
x
y
31
�2
31
�
1�2
�
3
1�2
�
9
�4
�= 2
31
�+ 3
1
�2
�
Figure 1.32: The Linear Combination of Example 1.8.2
Linear combinations allow elegant descriptions of lines and planes. Recall that a vector equationfor a line l in Fn containing p and parallel to a nonzero vector v is
x� p = tv
That is, a vector x lies on l exactly when x di↵ers from p by a linear combination of v.Similarly, recall that a vector equation for a plane P in Fn containing p and parallel to non-
parallel vectors a and b isx� p = sa + tb
That is, a vector x lies on P exactly when x di↵ers from p by a linear combination of a and b.5These coe�cients are also called the weights of the linear combination.

42 CHAPTER 1. VECTORS
1.8.1 Standard Basis Vectors
Definition 1.8.3. For each positive integer n and each j = 1, . . . , n, the j-th standard basis
vector in Fn is the vector e
j
def= (ej,1, . . . , ej,n
) such that
ej,k
=⇢
1 if k = j0 if k 6= j
Less formally, e
j
is the vector whose j-th component is 1 while all other components are zero.That is,
e
j
def=
2
66666666664
0...010...0
3
77777777775
j-th component
Example 1.8.4. The standard basis vectors in F2 are
e1 =
10
�and e2 =
01
�
Applied scientists frequently denote the standard basis vectors e1 and e2 in R2 by i and j, respec-tively.
Example 1.8.5. The standard basis vectors in F3 are
e1 =
2
4100
3
5 , e2 =
2
4010
3
5 and e3 =
2
4001
3
5
Applied scientists often denote the standard basis vectors e1, e2 and e3 in R3 by i, j and k,respectively.
A very important property of the standard basis vectors is that every vector in Fn is a linearcombination of the standard basis vectors.
Example 1.8.6. Express
2
4�1/2
3⇡
3
5 as a linear combination of the standard basis vectors in R3.
Solution.2
4�1/2
3⇡
3
5 =
2
4�1/2
00
3
5 +
2
4030
3
5 +
2
400⇡
3
5
= (�1/2)
2
4100
3
5 + 3
2
4010
3
5 + ⇡
2
4001
3
5
= (�1/2)e1 + 3e2 + ⇡e3
N

1.8. LINEAR COMBINATIONS 43
Theorem 1.8.7. Every vector in Fn is a linear combination of the standard basis vectors in Fn.
Proof. Let a
def= (a1, . . . , an
) 2 Fn. Then
a =nX
j=1
aj
e
j
Therefore, every vector in Fn is a linear combination of the standard basis vectors in Fn.
1.8.2 Parallelotopes
Parallelotopes generalize line segments and parallelograms.
Definition 1.8.8. Let k and n be positive integers. The k-parallelotope in Rn with vertex
p 2 Rn and edges v1, . . . ,vk
2 Rn is
Pdef=
8<
:x 2 Rn : x� p =kX
j=1
cj
v
j
for some c1, . . . , ck
2 [0, 1]
9=
;
Example 1.8.9. A 1-parallelotope is a line segment.
Example 1.8.10. A 2-parallelotope is a parallelogram.
Definition 1.8.11. A parallelepiped is a 3-parallelotope.
See Figure 1.33
1.8.3 Centers of Mass
Definition 1.8.12. The total mass of a system of particles with masses m1, . . . ,mk
is
Mdef=
kX
j=1
mj
Definition 1.8.13. The center of mass of a system of particles with masses m1, . . . ,mk
andrespective positions r1, . . . , rk
2 Rn is
r
def=1M
kX
j=1
mj
r
j
By writing
r
def=kX
j=1
mj
Mr
j
we see that the center of mass of a system of particles is the linear combination of the particlespositions each weighted by the ratio of its mass to the total mass.
Example 1.8.14.

44 CHAPTER 1. VECTORS
p
v1
v2
v3
x
y
z
Figure 1.33: A Parallelepiped in R3
Find the center of mass of the system of particles described in Table 1.1.
Solution. The total mass of the system is
M = 3 + 8 + 4 = 15
The center of mass of the system is
r =115
(3(0, 0) + 8(1, 2) + 4(2, 1)) = (16/15, 4/3)
N
Terms
• linear combination
• standard basis vectors
• parallelotope

1.8. LINEAR COMBINATIONS 45
Position Mass (kg)(0, 0) 3(1, 2) 8(2, 1) 4
Table 1.1: The System of Particles in Example 1.8.14
• parallelepiped
• total mass of a system of particles
• center of mass of a system of particles
Concepts
• Linear algebra is the study of linear combinations.
• Every vector is a linear combination of the standard basis vectors.
• Parallelotopes are generalizations of line segments and parallelograms.
• The center of mass of a system of particles is the linear combination of the particles positionseach weighted by the ratio of its mass to the total mass.
Skills
• Express a vector in Fn as a linear combination of the standard basis vectors in Fn.
• Find the center of mass of a system of particles.
Exercises
1. Express (�2, 0, ⇡, 11/17) as a linear combination of the standard basis vectors in R4.
2. Find the center of mass of the system of particles described in Table 1.2.
Position Mass (g)(5,�4, 3) 2(4, 3,�2) 5
(�4,�3, 1) 2(�9, 8, 6) 1
Table 1.2: The System of Particles in Exercise 2
46 CHAPTER 1. VECTORS
3. The mass of the Earth is approximately 5.972 ⇥ 1024 kg. The mass of the moon is approx-imately 7.34767309 ⇥ 1022 kg. The distance from the Earth to the moon is approximately384, 400 km. How far is the center of mass of the Earth-moon system from the center of theEarth?
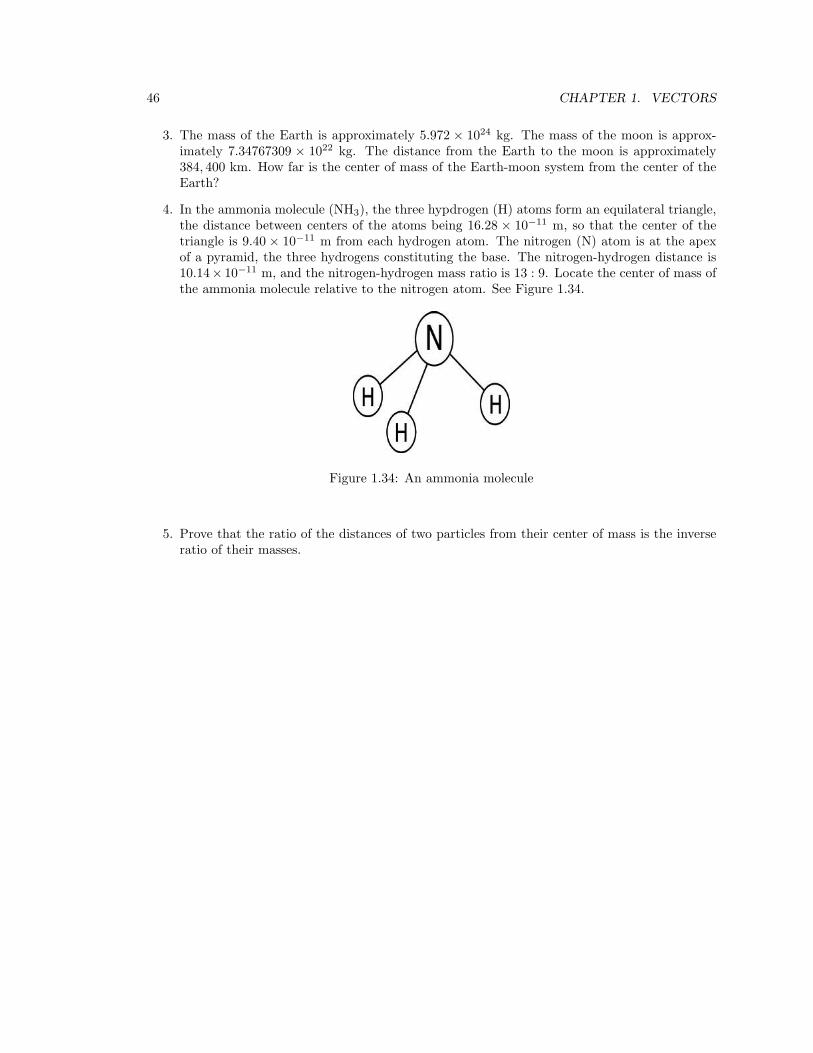
4. In the ammonia molecule (NH3), the three hypdrogen (H) atoms form an equilateral triangle,the distance between centers of the atoms being 16.28 ⇥ 10�11 m, so that the center of thetriangle is 9.40 ⇥ 10�11 m from each hydrogen atom. The nitrogen (N) atom is at the apexof a pyramid, the three hydrogens constituting the base. The nitrogen-hydrogen distance is10.14⇥ 10�11 m, and the nitrogen-hydrogen mass ratio is 13 : 9. Locate the center of mass ofthe ammonia molecule relative to the nitrogen atom. See Figure 1.34.
Figure 1.34: An ammonia molecule
5. Prove that the ratio of the distances of two particles from their center of mass is the inverseratio of their masses.
Chapter 2
The Inner Product
In this chapter we define the inner product of two vectors in Fn and use the inner product to developthe geometric concepts of length, distance and angle in Fn.
2.1 The Inner Product: Motivation
Objective
• Motivate the definition of the inner product of two vectors.
In Section 2.2 we will define the inner product of two vectors a
def= (a1, . . . , an
) and b
def=(b1, . . . , bn
) in Fn by
ha,bi def=nX
k=1
ak
bk
(2.1)
The inner product will provide a foundation on which we will build the concepts of length, distanceand angle. In this section our goal is provide intuition and motivation for formula (2.1). LikeSection 1.1 this section is informal. None of the definitions or results in this section are o�cial.
How can we determine whether two vectors a and b are perpendicular? That is, under whatconditions do a and b form a right angle? We will solve this problem in the plane using commonnotions from elementary geometry and rectangular coordinates. We begin with a familiar fact. ThePythagorean Theorem states that a triangle with side lengths a b c is a right triangle if andonly if
a2 + b2 = c2
See Figure 2.1.First, we will use the Pythagorean Theorem to find the distance between two points P and
Q in a plane endowed with a rectangular coordinate system. Denote this distance by |PQ|. Let(p1, p2) be the coordinates of P , and let (q1, q2) be the coordinates of Q. Consider the point R withcoordinates (q1, p2). Since P and R have the same second coordinate, |PR| = |p1 � q1|. Similarly,
47

48 CHAPTER 2. THE INNER PRODUCT
a
b
c
Figure 2.1: The Pythagorean Theorem
P
Q
R
|PQ|
(p1, p2) (q1, p2)
(q1, q2)
|PR| = |p1 � q1|
|RQ| = |p2 � q2|
Figure 2.2: Distance Between P and Q
since R and Q have the same first coordinate, |RQ| = |p2�q2|. See Figure 2.2. By the PythagoreanTheorem,
|PQ|2 = |PR|2 + |RQ|2= |p1 � q1|2 + |p2 � q2|2
Thus, the distance between the points P and Q in the plane is
|PQ| =p
(p1 � q1)2 + (p2 � q2)2
|a1|
|a2|kak
Figure 2.3: The Length of a Vector
Second, we will use the distance formula to define the length of a vector. In particular, if
a
def=
a1
a2
�, then define the length of a by
kak def=q
a21 + a2
2

2.2. THE INNER PRODUCT: DEFINITION AND PROPERTIES 49
a
b
a + b
Figure 2.4: The Pythagorean Theorem
See Figure 2.3.Finally, recall from the triangle method of adding vectors that two vectors a and b and their
sum a + b form a triangle. By the Pythagorean Theorem, the vectors a and b are perpendicular ifand only if
kak2 + kbk2 = ka + bk2✓q
a21 + a2
2
◆2
+✓q
b21 + b2
2
◆2
=⇣p
(a1 + b1)2 + (a2 + b2)2⌘2
a21 + a2
2 + b21 + b2
2 = (a1 + b1)2 + (a2 + b2)2
a21 + a2
2 + b21 + b2
2 = a21 + 2a1b1 + b2
1 + a22 + 2a2b2 + b2
2
�2(a1b1 + a2b2) = 0a1b1 + a2b2 = 0
We call the scalar a1b1 + a2b2 the inner product of the vectors a and b.In this section we have used several distinct, yet related, geometric ideas: distance, length, angle
and perpendicularity. In the rest of this chapter we will rigorously develop the concepts of length,distance and perpendicularity, but starting with the inner product. One advantage of this approachis that we will have a geometry that works not only in R2, but also in Fn!
Concept
• Vectors a
def= (a1, a2) and b
def= (b1, b2) in R2 are perpendicular if and only if a1b1 + a2b2 = 0.
2.2 The Inner Product: Definition and Properties
Objective
• Define the inner product in Fn and establish its elementary properties.

50 CHAPTER 2. THE INNER PRODUCT
Definition 2.2.1. The inner product
1 of the vectors a
def= (a1, . . . , an
) and b
def= (b1, . . . , bn
) inFn is
ha,bi def=nX
j=1
aj
bj
The inner product of two vectors is a scalar rather than a vector.
Example 2.2.2. Find the inner product of a
def= (1� 2i, 3i) and b
def= (�4 + 5i,�6) in C2.
Solution. The inner product of a and b is
ha,bi = (1� 2i)(�4 + 5i) + (3i)(�6) = (1� 2i)(�4� 5i)� 18i = �14� 15i
N
If a
def= (a1, . . . , an
) and b
def= (b1, . . . , bn
) are vectors in Rn, then
ha,bi =nX
j=1
aj
bj
=nX
j=1
aj
bj
because every real number is equal to its complex conjugate.
Example 2.2.3. Find the inner product of a
def= (1,�2, 3) and b
def= (�4, 5,�6) in R3.
Solution. The inner product of a and b is
ha,bi = 1(�4) + (�2)5 + 3(�6) = �32
N
Example 2.2.4. Find the inner product of the standard vectors e
j
and e
k
in Fn.
Solution. Denote the components of e
j
by ej,1, . . . , ej,n
, and denote the components of e
k
byek,1, . . . , ek,n
. Then
ej,l
=⇢
1 if l = j0 if l 6= j
andek,l
=⇢
1 if l = k0 if l 6= k
By the definition of the inner product,
hej
, ek
i =nX
l=1
ej,l
ek,l
1An alternative name for the inner product is the scalar product because the inner product of two vectors is ascalar rather than a vector. When the vectors have real components we often call the inner product the dot productbecause of the traditional notation a · b for the inner product of a and b. When the vectors have complex componentswe often call the inner product the Hermitian inner product, in honor of Charles Hermite (1822–1901).

2.2. THE INNER PRODUCT: DEFINITION AND PROPERTIES 51
If j = k, then
hej
, ek
i = hej
, ej
i =nX
l=1
ej,l
ej,l
=nX
l=1
|ej,l
|2 = 1
If j 6= k, then for each l = 1, . . . , n, either ej,l
= 0 or ek,l
= 0. Thus,
hej
, ek
i = 0
Therefore,
hej
, ek
i =⇢
1 if j = k0 if j 6= k
N
The next theorem establishes the fundamental properties of the inner product.
Theorem 2.2.5.
(i) (Positivity) For all a 2 Fn, ha,ai is real and nonnegative.
(ii) (Definiteness) For all a 2 Fn, ha,ai = 0 if and only if a = 0.
(iii) (Conjugate Symmetry) For all a,b 2 Fn,
ha,bi = hb,ai
(iv) (Additivity in the first argument) For all a,b, c 2 Fn,
ha + b, ci = ha, ci+ hb, ci
(v) (Homogeneity in the first argument) For all a,b 2 Fn and all scalars k,
hka,bi = kha,bi
Proof.
(i) Let a
def= (a1, . . . , an
) 2 Fn. Because the absolute value of a complex number is a real number,and squares of real numbers are nonnegative,
ha,ai =nX
j=1
aj
aj
=nX
j=1
|aj
|2 � 0
(ii) Let a
def= (a1, . . . , an
) 2 Fn. From the proof of part (i),
ha,ai =nX
j=1
|aj
|2 � 0
Since a sum of nonnegative terms is zero exactly when each term is zero, ha,ai = 0 if andonly if a
j
= 0 for all j = 1, . . . , n; that is, a = 0.

52 CHAPTER 2. THE INNER PRODUCT
(iii) Let a
def= (a1, . . . , an
),b def= (b1, . . . , bn
) 2 Fn. By properties of complex conjugates,
ha,bi =nX
j=1
aj
bj
=nX
j=1
aj
bj
=nX
j=1
aj
bj
=nX
j=1
bj
aj
=nX
j=1
bj
aj
= hb,ai
(iv) Let a
def= (a1, . . . , an
),b def= (b1, . . . , bn
), c def= (c1, . . . , cn
) 2 Fn.
ha + b, ci =nX
j=1
(aj
+ bj
)cj
=nX
j=1
(aj
cj
+ bj
cj
) =nX
j=1
aj
cj
+nX
j=1
bj
cj
= ha, ci+ hb, ci
(v) Let a
def= (a1, . . . , an
),b def= (b1, . . . , bn
) 2 Fn. Let k be a scalar.
hka,bi =nX
j=1
(kaj
)bj
=nX
j=1
k(aj
bj
) = k
nX
j=1
aj
bj
= kha,bi
From the additivity and homogeneity of the inner product in its first argument and conjugatesymmetry we derive corresponding properties of the inner product in its second argument.
Corollary 2.2.6.
(i) (Additivity in the second argument) For all a,b, c 2 Fn,
ha,b + ci = ha,bi+ ha, ci
(ii) (Conjugate Homogeneity in the second argument) For all a,b 2 Fn and all scalars k,
ha, kbi = kha,bi
Proof.
(i) Let a,b, c 2 Fn. By conjugate symmetry and the additivity in the first argument,
ha,b + ci = hb + c,ai = hb,ai+ hc,ai = hb,ai+ hc,ai = ha,bi+ ha, ci
(ii) Let a,b 2 Fn. Let k be a scalar. By conjugate symmetry and the homogeneity in the firstargument,
ha, kbi = hkb,ai = khb,ai = khb,ai = kha,bi
From additivity and homogeneity in the first argument we obtain linearity in the first argument:
hka + lb, ci = hka, ci+ hlb, ci = kha, ci+ lhb, cifor all a,b, c 2 Fn and all scalars k, l. Our next theorem extends linearity in the first argument toany number of terms. The proof uses the Principle of Mathematical Induction.

2.2. THE INNER PRODUCT: DEFINITION AND PROPERTIES 53
Theorem 2.2.7. For each integer p � 2, if a1, . . . ,ap
,b 2 Fn and k1, . . . , kp
are scalars, then*
pX
j=1
kj
a
j
,b
+=
pX
j=1
kj
haj
,bi
Proof. We proceed by means of induction on the number p of vectors. If p = 2, then
hk1a1 + k2a2,bi = hk1a1,bi+ hk2a2,bi= k1 ha1,bi+ k2ha2,bi
for all a1,a2 2 Fn and all scalars k1 and k2.Let l � 2 be an integer. As an inductive hypothesis, assume that if a1, . . . ,al
,b 2 Fn andk1, . . . , kl
are scalars, then *lX
j=1
kj
a
j
,b
+=
lX
j=1
kj
haj
,bi
Let a1, . . . ,al+1,b 2 Fn, and let k1, . . . , kl+1 be scalars. From additivity in the first argument, theinductive hypothesis and homogeneity in the first argument we conclude that
*l+1X
j=1
kj
a
j
,b
+=
*0
@lX
j=1
kj
a
j
1
A + kl+1al+1,b
+
=
*0
@lX
j=1
kj
a
j
1
A ,b
++ hk
l+1al+1,bi
=
0
@lX
j=1
kj
haj
,bi1
A + kl+1hal+1,bi
=l+1X
j=1
kj
haj
,bi
By the Principle of Mathematical Induction, for each integer p � 2, if a1, . . . ,ap
,b 2 Fn andk1, . . . , kp
are scalars, then *pX
j=1
kj
a
j
,b
+=
pX
j=1
kj
haj
,bi
From linearity in the first argument and conjugate symmetry we obtain antilinearity in thesecond argument:
ha, kb + lci = hkb + lc,ai= khb,ai+ lhc,ai= khb,ai+ lhc,ai= khb,ai+ lhc,ai= kha,bi+ lha, ci
54 CHAPTER 2. THE INNER PRODUCT
for all a,b, c 2 Fn and all scalars k, l. In the exercises we ask you to extend antilinearity in thesecond argument to any number of terms. Together, the property of linearity in the first argumentand antilinearity in the second is called sesquilinearity.
The following proposition shows that we can use the inner product to extract individual com-ponents from a coordinate vector.
Proposition 2.2.8. For each a = (a1, . . . , an
) 2 Fn and each k = 1, . . . , n
ha, ek
i = ak
Proof. For each a
def= (a1, . . . , an
) 2 Fn and each k = 1, . . . , n,
ha, ek
i =
*nX
j=1
aj
e
j
, ek
+=
nX
j=1
aj
hej
, ek
i = aj
by Theorem 2.2.7 and Example 2.2.4.
Terms
• inner product
• positivity
• definiteness
• conjugate symmetry
• additivity in the first argument
• homogeneity in the first argument
• additivity in the second argument
• conjugate homogeneity in the first argument
• linearity in the first argument
• antilinearity in the second argument
• sesquilinearity
Concept
• The inner product is positive, definite, conjugate symmetric, additive in both arguments,homogeneous in the first argument and conjugate homogeneous in the second argument.
Skill
• Find the inner product of two vectors in Fn.

2.3. NORM AND DISTANCE 55
Exercises
1. Find the inner product of each of the following pairs of vectors.
(a) (1� 2i,�3 + 4i), (�2 + i,�4 + 3i)(b) (1, 5), (�2, 3)(c) (�1, 0, 7), (2, 4,�6)(d) (1, 3, 5, . . . , 2n� 1), (2,�4, 6, . . . , (�1)n+12n)
2. Prove that for each positive integer p, if a,b1, . . . ,bp
2 Fn and k1, . . . , kp
are scalars, then*
a,
pX
j=1
kj
b
j
+=
pX
j=1
kj
ha,bj
i
3. (a) Provide an example of vectors a, b, x 2 Fn so that a 6= b, x 6= 0 and hx,ai = hx,bi.(b) Prove that if hx,ai = 0 for all x 2 Fn, then a = 0.(c) Prove that if a,b 2 Fn and hx,ai = hx,bi for all x 2 Fn, then a = b.
2.3 Norm and Distance
Objective
• Define the norm in Fn, and establish its elementary properties.
Definition 2.3.1. The norm
2 of a 2 Fn is
kak def=pha,ai (2.2)
If a
def= (a1, . . . an
), then by the definition of the inner product
kak =
0
@nX
j=1
|aj
|21
A
12
(2.3)
Squaring each side of equations (2.2) and (2.3) we obtain
kak2 = ha,ai =nX
j=1
|aj
|2
Example 2.3.2. Find the norm of a
def= (1,�2, 3) in R3.2length or magnitude

56 CHAPTER 2. THE INNER PRODUCT
Solution. The norm of a is
kak = k(1,�2, 3)k =p
12 + |� 2|2 + 32 =p
14
N
Example 2.3.3. Find the norm of (1, i) in C2.
Solution. The norm of (1, i) isk(1, i)k =
p12 + |i|2 =
p2
If we were to add the squares of the components of (1, i) without conjugating, we would obtainp
12 + i2 =p
1 + (�1) = 0
Thus, there would be a nonzero vector with zero length. This example shows why conjugation isdesirable in the definition of the inner product on Cn. N
The next theorem establishes some fundamental properties of the norm.
Theorem 2.3.4.
(i) For all a 2 Fn, kak is real and nonnegative.
(ii) For all a 2 Fn, kak = 0 if and only if a = 0.
(iii) For all a 2 Fn and all scalars k,kkak = |k|kak
Proof.For every z 2 C,
zz = |z|2
(i) For all a 2 Fn, kak =pha,ai which is real and nonnegative.
(ii) For all a 2 Fn, kak = 0 if and only if ha,ai = 0; that is, a = 0 by the definiteness of the innerproduct.
(iii) Let a 2 Fn. Let k be a scalar. By homogeneity in the first argument and conjugate homo-geneity in the second we have
kkak =phka, kai =
q(kk)ha,ai =
p|k|2ha,ai = |k|kak
It will be convenient to have a formula for the square of the norm of a sum of two vectors.
Proposition 2.3.5.
ka + bk2 = kak2 + 2Re ha,bi+ kbk2
for all a,b 2 Fn.

2.3. NORM AND DISTANCE 57
Proof. For all a,b 2 Fn,For every z 2 C,
z + z = 2Re z
ka + bk2 = ha + b,a + bi= ha,a + bi+ hb,a + bi= ha,ai+ ha,bi+ hb,ai+ hb,bi= ha,ai+ ha,bi+ ha,bi+ hb,bi= kak2 + 2Re ha,bi+ kbk2
2.3.1 Normalization
Often it is useful to specify a direction in Fn by providing a vector in that direction with lengthone.
Definition 2.3.6. A vector u 2 Fn is a unit vector if kuk = 1.
The next theorem shows how to find a unique unit vector in the direction of any nonzero vector.To normalize a nonzero vector is to find a unit vector in the same direction.
Theorem 2.3.7. If a is a nonzero vector in Fn, then1kaka is the unique unit vector in the direction
of a.
Proof. Since a 6= 0 we have1kak > 0. So,
1kaka is a vector in the direction of a. By Theorem 2.3.4,
����1kaka
���� =����
1kak
���� kak =kakkak = 1
Therefore,1kaka is a unit vector in the direction of a. Define u
def=1kaka.
To prove that u is unique, assume that v is a unit vector in the direction of a. Then kvk = 1and there exists a nonnegative scalar k such that
v = ka
Consequently,
kkak = 1|k|kak = 1
|k| = 1/kak
Since k � 0, we obtain k = 1/kak. Hence,
v =1kaka = u
Therefore, u is the unique unit vector in the direction of a.

58 CHAPTER 2. THE INNER PRODUCT
For nonzero vectors a we denote1kaka by
a
kak .
Example 2.3.8. Normalize a
def= (1,�2, 3).
Solution. Applying Theorem 2.3.7, a unit vector in the direction of a is
u =a
kak =(1,�2, 3)k(1,�2, 3)k =
(1,�2, 3)p14
=✓
1p14
,� 2p14
,3p14
◆
N
2.3.2 Polarization
While we define the norm of a vector a 2 Fn in terms of the inner product by the formula
kak def=pha,ai
there is also an expression for the inner product in terms of the norm.
Polarization Identity.
ha,bi =14
�ka + bk2 � ka� bk2�
for all a,b 2 Rn.
Proof. Let a,b 2 Rn. By Proposition 2.3.5 and Corollary 2.2.6(ii),
14
�ka + bk2 � ka� bk2� =14
�kak2 + 2ha,bi+ kbk2 � kak2 � 2ha,�bi � k � bk2�
=14
(2ha,bi+ 2ha,bi)= ha,bi
A generalized version of the polarization identity for vectors with complex components appearsin the exercises.
2.3.3 Distance
b
a
}kb� ak
Figure 2.5: The Distance Between Vectors

2.3. NORM AND DISTANCE 59
Definition 2.3.9. The distance between vectors a and b in Fn is
dist(a,b) def= kb� ak
If a
def= (a1, . . . , an
) and b
def= (b1, . . . , bn
), then
dist(a,b) =
0
@nX
j=1
|bj
� aj
|21
A
12
Example 2.3.10. Find the distance between a
def= (1,�2, 3) and b
def= (�4, 5,�6).
Solution. The distance between a and b is
dist(a,b) =p
(�4� 1)2 + (5� (�2))2 + (�6� 3)2 =p
155
N
Terms
• norm
• unit vector
• normalize
• distance
Concepts
• For each nonzero vector a in Fn there is a unique unit vector in the direction of a.
• The Generalized Polarization Identity expresses the inner product of two vectors in terms ofnorms.
Skills
• Find the norm of a vector in Fn.
• Normalize a nonzero vector in Fn.
• Find the distance between two vectors in Fn.
Exercises
1. Find the norm of each vector.
(a) (1� 2i,�3 + 4i)

60 CHAPTER 2. THE INNER PRODUCT
(b) (1, 5)(c) (�1, 0, 7)(d) (1, 3, 5, . . . , 2n� 1),(e) (2,�4, 6, . . . , (�1)n+12n)
2. Normalize each vector.
(a) (8/3, 1)(b) (7/4, 1/2, 1)
3. Find a vector with norm 3 in the direction of the vector (1, 1,�1).
4. Find the distance between each pair of vectors.
(a) (1� 2i,�3 + 4i), (�2 + i,�4 + 3i)(b) (10,�3), (�1,�5)(c) (0,�5, 2), (�4,�1, 8)
5. Prove that for all a,b 2 Rn, kak = kbk if and only if ha + b,a� bi = 0.
6. Prove that
kak nX
i=1
|ai
| pnkak
for all a
def= (a1, . . . , an
) 2 Fn.
7. (Parallelogram Equality) Prove that
ka + bk2 + ka� bk2 = 2�kak2 + kbk2�
for all a,b 2 Fn. Draw a diagram of vectors a, b, a+b and a�b. Use the diagram to explainwhat the parallelogram equality says about parallelograms.
8. Prove thatha + b,a� bi = ka||2 � 2iIm ha,bi � kbk2
for all a,b 2 Fn.
9. Prove that
(a) dist(a,b) � 0 with equality if and only if a = b
(b) dist(a,b) = dist(b,a)
for all a,b 2 Fn.
10. (a) (Generalized Polarization Identity) Prove that
ha,bi =14
3X
k=0
ikka + ikbk2
for all a,b 2 Cn.(b) Show that the Polarization Identity is a consequence of the Generalized Polarization
Identity.

2.4. ORTHOGONALITY 61
2.4 Orthogonality
Objective
• Define orthogonality.
Definition 2.4.1. Vectors a and b in Fn are orthogonal
3, denoted a ? b, if
ha,bi = 0
The zero vector is orthogonal to every vector a 2 Fn since ha,0i = 0.
Example 2.4.2. The vectors
xy
�and
�yx
�in R2 are orthogonal because
⌧xy
�,
�yx
��= x(�y) + yx = 0
If we regard vectors a and b as the sides of a triangle, then the third side of the triangle isa+b. Our definition of orthogonality agrees with our intuition to the extent that the PythagoreanTheorem holds in Rn (although not in Cn) exactly when ha,bi = 0. See Figure 2.6.
a
b
a + b
Figure 2.6: The Pythagorean Theorem
Pythagorean Theorem. If a,b 2 Fn are orthogonal, then
ka + bk2 = kak2 + kbk2
The converse is true if F = R.
Proof. Let a,b 2 Fn. By Proposition 2.3.5
ka + bk2 = kak2 + 2Re ha,bi+ kbk23The term orthogonal comes from the Greek orthogonios for right-angled. An alternative term is perpendicular
which comes from the Latin perpendicularis for vertical.

62 CHAPTER 2. THE INNER PRODUCT
If a and b are orthogonal, then ha,bi = 0. Thus,
ka + bk2 = kak2 + kbk2
Conversely, if F = R and ka + bk2 = kak2 + kbk2, then Re ha,bi = ha,bi. Hence,
kak2 + 2Re ha,bi+ kbk2 = kak2 + kbk2ha,bi = 0
Therefore, a and b are orthogonal.
Proposition 2.4.3. Let a 2 Fn. If b, c 2 Fn are orthogonal to a, then b + c is orthogonal to a.
Proof. Assume that b, c 2 Fn so that b and c are orthogonal to a. By additivity of the innerproduct in the first argument and the definition of orthogonality,
hb + c,ai = hb,ai+ hc,ai = 0
Therefore, b + c is orthogonal to a.
Term
• orthogonal
Concept
• Pythagorean Theorem
Skill
• Determine whether two vectors in Fn are orthogonal.
Exercises
1. Determine whether each of the following statements is true or false. If the statement is true,then prove it. If the statement is false, then provide a counterexample. Let a, b and c bevectors in Fn.
(a) a ? a
(b) If a ? b, then b ? a.(c) If a ? b and b ? c, then a ? c.
2. Determine which pairs of vectors are orthogonal.
(a) (1� 2i,�3 + 4i), (�2 + i,�4 + 3i)(b) (8,�5), (�2,�3)(c) (12, 3,�5), (2,�3, 3)
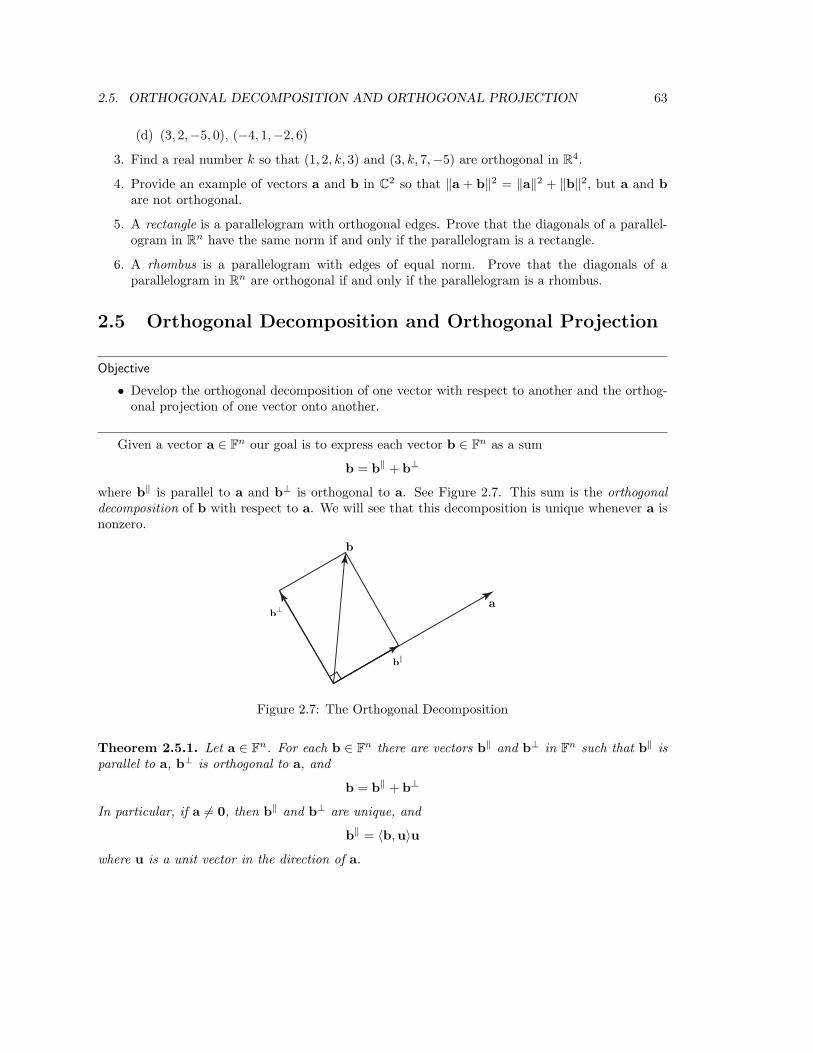
2.5. ORTHOGONAL DECOMPOSITION AND ORTHOGONAL PROJECTION 63
(d) (3, 2,�5, 0), (�4, 1,�2, 6)
3. Find a real number k so that (1, 2, k, 3) and (3, k, 7,�5) are orthogonal in R4.
4. Provide an example of vectors a and b in C2 so that ka + bk2 = kak2 + kbk2, but a and b
are not orthogonal.
5. A rectangle is a parallelogram with orthogonal edges. Prove that the diagonals of a parallel-ogram in Rn have the same norm if and only if the parallelogram is a rectangle.
6. A rhombus is a parallelogram with edges of equal norm. Prove that the diagonals of aparallelogram in Rn are orthogonal if and only if the parallelogram is a rhombus.
2.5 Orthogonal Decomposition and Orthogonal Projection
Objective
• Develop the orthogonal decomposition of one vector with respect to another and the orthog-onal projection of one vector onto another.
Given a vector a 2 Fn our goal is to express each vector b 2 Fn as a sum
b = b
k + b
?
where b
k is parallel to a and b
? is orthogonal to a. See Figure 2.7. This sum is the orthogonaldecomposition of b with respect to a. We will see that this decomposition is unique whenever a isnonzero.
b
k
b
?a
b
Figure 2.7: The Orthogonal Decomposition
Theorem 2.5.1. Let a 2 Fn. For each b 2 Fn there are vectors b
k and b
? in Fn such that b
k isparallel to a, b
? is orthogonal to a, and
b = b
k + b
?
In particular, if a 6= 0, then b
k and b
? are unique, and
b
k = hb,uiuwhere u is a unit vector in the direction of a.

64 CHAPTER 2. THE INNER PRODUCT
Proof. Let a,b 2 Fn. If a = 0, then let b
k = 0 and b
? = b.If a 6= 0, then u = a/kak is a unit vector in the direction of a. Define
b
k def= hb,uiuThen
b
k =hb,uikak a
so that b
k is parallel to a. Defineb
? def= b� b
k
Adding b
k to both sides we obtainb = b
k + b
?
We will show that b
? is orthogonal to a.
hb?,ai = hb� b
k,ai= hb,ai � hbk,ai= hb,ai � hhb,uiu,ai= hb,ai � hb,uihu,ai= hb,ai � hb, (1/kak)aih(1/kak)a,ai= hb,ai � hb,ai ha,ai
kak2= 0
Hence, b
? is orthogonal to a.To prove that b
k and b
? are unique, assume that c
k and c
? are vectors in Fn so that c
k isparallel to a, c
? is orthogonal to a, and b = c
k + c
?. Since c
k is parallel to a 6= 0, there is a scalark so that c
k = ka. Then b = c
k + c
? implies that
c
? = b� ka
Because c
? is orthogonal to a we obtain
0 = hc?,ai= hb� ka,ai= hb,ai � kha,ai= hb,ai � kkak2
Solving for k we obtain
k =hb,aikak2
=hb,a/kakikak
=hb,uikak

2.5. ORTHOGONAL DECOMPOSITION AND ORTHOGONAL PROJECTION 65
b
a
projab
Figure 2.8: The Orthogonal Projection
Thus,
c
k = ka =hb,uikak a = hb,uiu = b
k
andc
? = b� c
k = b� b
k = b
?
Therefore, there are unique vectors b
k and b
? in Fn so that b
k is parallel to a, b
? is orthogonalto a, and b = b
k + b
?.
Theorem 2.5.1 motivates the following definition. See Figure 2.8.
Definition 2.5.2. Let a,b 2 Fn. If a 6= 0, then the orthogonal projection of b onto a is
projabdef= hb,uiu
where u is a unit vector in the direction of a. If a = 0, then the projection of b onto a is the zerovector.
Example 2.5.3. Let a
def= (1,�2, 3) and b
def= (�4, 5,�6). Find projab.
Solution 1. Normalize a to obtain
u =a
kak =✓
1p14
,� 2p14
,3p14
◆
Then
projab = hb,uiu = � 32p14
✓1p14
,� 2p14
,3p14
◆=
✓�16
7,327
,�487
◆
N
Solution 2. Often it is easier to compute a projection without explicitly normalizing a.
projab =hb,aikak2 a = �32
14(1,�2, 3) =
✓�16
7,327
,�487
◆
N

66 CHAPTER 2. THE INNER PRODUCT
Term
• orthogonal projection
Concepts
• Orthogonal Decomposition: Given a vector a 2 Fn each vector b 2 Fn is a sum
b = b
k + b
?
where b
k is parallel to a and b
? is orthogonal to a. This decomposition is unique when a isnonzero.
Skills
• Find the orthogonal decomposition of one vector in Fn with respect to another.
• Find the orthogonal projection of one vector in Fn onto another.
Exercises
1. Express b as the sum of a vector parallel to a and a vector orthogonal to a.
(a) a
def= (4,�7), b
def= (2, 3)
(b) a
def= (7, 1), b
def= (2, 6)
2. Find projab.
(a) a
def= (2, 3,�1), b
def= (1/p
2, 1/p
2, 0)
(b) a
def= (1,�1, 7, 3, 2), b
def= (2, 5, 0, 9,�1)
(c) a
def= (5 + i, 2i), b
def= (3 + 4i, 2� 3i)
(d) a
def= (1� i, 3i, 1 + i), b
def= (1, 2� i, 3 + 2i)
3. Let a,b 2 Fn.
(a) Prove that projab and b� projab are orthogonal.
(b) Prove that b� projab = 0 if and only if a is parallel to b.

2.6. THE CAUCHY-SCHWARZ INEQUALITY 67
2.6 The Cauchy-Schwarz Inequality
Objective
• State and prove the Cauchy-Schwarz inequality and explain its major consequences.
From the orthogonal decomposition and the Pythagorean Theorem we obtain one of the mostimportant facts in mathematics: the Cauchy-Schwarz inequality.
Cauchy-Schwarz Inequality. For all a,b 2 Fn
| ha,bi | kak kbk
with equality if and only if a is parallel to b.
Proof. Let a,b 2 Fn. If a = 0, then both sides of the inequality are zero. So, equality holds in thiscase, and a k b.
If a 6= 0, then u = a/kak is a unit vector in the direction of a. Since the vectors projab andb� projab are orthogonal, the Pythagorean Theorem implies that
kbk2 = kprojabk2 + kb� projabk2� khb,uiuk2� | hb,ui |2kuk2
�����
⌧b,
a
kak�����
2
� | hb,ai |2kak2
with equality if and only if b � projab = 0, i.e. a is parallel to b. Multiplying each side by kak2we have
kak2 kbk2 � | hb,ai |2
Taking square roots and applying the fact that | ha,bi | = | hb,ai | we obtain
| ha,bi | kak kbk
with equality if and only if a is parallel to b.
2.6.1 The Triangle Inequality
From the Cauchy-Schwarz inequality we derive another fundamental property of the norm calledthe triangle inequality. Remember that if we regard vectors a and b as sides of a triangle, then thethird side of the triangle is a+b. Geometrically, the triangle inequality says that the length of oneside of a triangle is no greater than the sum of the lengths of the other two sides. See Figure 2.9.

68 CHAPTER 2. THE INNER PRODUCT
a
b
a + b
Figure 2.9: The Triangle Inequality
Triangle Inequality. For all a,b 2 Fn
ka + bk kak+ kbk
with equality if and only if a is in the direction of b.
Proof. Let a,b 2 Fn. By Proposition 2.3.5 and the Cauchy-Schwarz inequality,
ka + bk2 = kak2 + 2Re ha,bi+ kbk2 kak2 + 2|Re ha,bi |+ kbk2 kak2 + 2| ha,bi |+ kbk2 kak2 + 2kak kbk+ kbk2 (kak+ kbk)2
Taking square roots we haveka + bk kak+ kbk
Equality holds if and only if
Re ha,bi = | ha,bi | = kak kbk
By Cauchy’s inequality, | ha,bi | = kak kbk if and only if a and b are parallel. That is, either thereis a scalar k so that b = ka or a = 0. If there is a scalar k so that b = ka, then Re ha,bi = | ha,bi |if and only if
Re kkak2 = |k| kak2
So, either k � 0 or a = 0. In either case, a is in the direction of b. Therefore, equality holds if andonly if a is in the direction of b.
2.6.2 Angle
If a and b are nonzero vectors in Rn, then the Cauchy-Schwarz inequality implies thatIn this subsection all
vectors have real
entries. | ha,bi |kak kbk 1

2.6. THE CAUCHY-SCHWARZ INEQUALITY 69
a
b
](a,b)
Figure 2.10: The Angle Between Nonzero Vectors
By the definition of absolute value,
�1 ha,bikak kbk 1
Since the domain of the arccosine function is [�1, 1],The arccosine of
x 2 [�1, 1] is the real
number ✓ 2 [0, ⇡] such
that cos ✓ = x. arccosha,bikak kbk
is defined.
Definition 2.6.1. The angle between nonzero vectors a and b in Rn is
](a,b) def= arccosha,bikak kbk
If a = 0 or b = 0, then we do not define the angle between a and b. By the definition of thearccosine function, the angle between two nonzero vectors is a number between 0 and ⇡.
Example 2.6.2. Find the angle between a
def= (1,�2, 3) and b
def= (�4, 5,�6).
Solution. The angle between a
def= (1,�2, 3) and b
def= (�4, 5,�6) is
](a,b) = arccosha,bikak kbk = arccos
✓� 32p
14p
77
◆= arccos
✓� 32
7p
22
◆⇡ 2.9 rad
N
Equipped with this definition of angle we see that our definition of orthogonality (Defini-tion 2.4.1) agrees with our intuition. Indeed, nonzero vectors a and b are orthogonal if and onlyif
](a,b) = arccosha,bikak kbk = arccos
0kak kbk = arccos 0 =
⇡
2rad
Theorem 2.6.3. If ✓ is the angle between nonzero vectors a,b 2 Rn, then
ha,bi = kak kbk cos ✓

70 CHAPTER 2. THE INNER PRODUCT
Proof. Let a,b 2 Rn be nonzero. Let ✓ be the angle ✓ between a and b. So,
cos ✓ =ha,bikak kbk
Multiplying both sides by kak kbk we obtain
ha,bi = kak kbk cos ✓.
If we abide by the convention that kak kbk cos ✓ = 0 whenever a = 0 or b = 0, then
ha,bi = kak kbk cos ✓
for all vectors a,b 2 Rn.
Theorem 2.6.4. If ✓ is the angle between the vectors a and b in Rn, then
kb?k = kbk sin ✓
where b
? is the component of b orthogonal to a.
Proof. By the Pythagorean Theorem,
kb?k2 = kb� proja(b)k2= kbk2 � kproja(b)k2
= kbk2 � | ha,bi |2kak4 kak2
= kbk2 � kak2kbk2 cos2 ✓
kak2= kbk2 (1� cos2 ✓)= kbk2 sin2 ✓
Since 0 ✓ ⇡, we know that sin ✓ � 0. So,p
sin2 ✓ = | sin ✓| = sin ✓. Therefore,
kb?k = kbk sin ✓
2.6.3 Work
Recall that the work W done by a constant scalar force F acting on a particle moving through aIn this subsection all
vectors have real
entries.displacement d along a line is the product of the force and the displacement:
W = Fd
Now consider a constant nonzero vector force F 2 Rn acting a particle moving through a nonzerodisplacement D 2 Rn. The force F itself may or may not be displacing the particle. On the one

2.6. THE CAUCHY-SCHWARZ INEQUALITY 71
F
D|W|
}✓
Figure 2.11: Work
hand, the force may be moving a wagon as in Figure 2.11. On the other hand, the force of aconstant wind blowing against you as you walk down a sidewalk acts on you, but hopefully doesnot displace you.
By analogy with the scalar case, the work W done by the force F on the particle is the productof the component of the force parallel to the displacement and the magnitude of the displacement.Orthogonally decomposing the force F with respect to the displacement D we obtain
F = F
? + F
k
= F
? + hF,uiuwhere u is the unit vector in the direction of D. The component of the force parallel to D is
hF,ui =⌧F,
D
kDk�
=hF,DikDk = kFk cos ✓
where ✓ is the angle between F and D. Therefore,
W = kFk kDk cos ✓
Indeed, we define work using this formula.
Definition 2.6.5. The work done by a constant force F 2 Rn on a particle with displacementD 2 Rn is
Wdef= kFk kDk cos ✓
where ✓ is the angle between F and D.
The SI units for the magnitudes of force and displacement are the newton (N) and the meter(m), respectively. The SI unit for work is the joule (J) where 1 J = 1 N · m.
Example 2.6.6. A 12 N force acts on a box at angle of ⇡/9 radians. Find the work done by theforce on the box as the box moves a distance of 3 m.
Solution. The work is
W = kFk kdk cos ✓ = (12 N)(3 m) cos✓
⇡
9
◆⇡ 33.8 J
N

72 CHAPTER 2. THE INNER PRODUCT
Theorem 2.6.7. The work W done by a constant force F 2 Rn on an object with displacementD 2 Rn is
W = hF,DiProof. If ✓ is the angle between F and D, then
W = kFk kDk cos ✓ = hF,Diby Theorem 2.6.3.
Terms
• angle
• work
Concepts
• Cauchy-Schwarz inequality
• Triangle inequality
• If ✓ is the angle between nonzero vectors a and b in Rn, then
ha,bi = kakkbk cos ✓
• The work W done by a constant force F 2 Rn on an object with displacement D 2 Rn is
W = hF,Di
Skills
• Find the angle between two nonzero vectors in Rn.
• Find the work done by a constant force F on a particle displaced by D.
Exercises
1. Let n be a positive integer. Verify the Cauchy-Schwarz inequality for (1, 2, 3, . . . , n) and(1, 1, 1, . . . , 1) in Rn.
2. Let n be a positive even integer. Verify the triangle inequality for (1, 0, 1, 0, . . . , 0) and(0, 1, 0, 1, . . . , 1) in Rn.
3. (Generalized Triangle Inequality) Prove that for each positive integer p � 2, if a1, . . . ,ap
2 Fn,then �����
pX
i=1
a
i
����� pX
i=1
kai
k

2.6. THE CAUCHY-SCHWARZ INEQUALITY 73
4. Prove thatdist(a, c) dist(a,b) + dist(b, c)
for all a,b, c 2 Fn.
5. (Reverse Triangle Inequality) Prove that
|kak � kbk| ka� bk
for all a,b 2 Fn.
6. Find the angle between each of the following pairs of vectors.
(a) (p
3, 1), (�p3, 1)
(b) (1,�2, 3), (3,�6,�5)
7. Prove that if ka� bk > ka + bk, then ](a,b) > ⇡/2 for all nonzero a,b 2 Rn.
8. (Law of Cosines) Prove that
ka� bk2 = kak2 + kbk2 � 2kak kbk cos ✓
for all a,b 2 Rn where ✓ is the angle between a and b.
9. Prove that for all nonzero a,b 2 Rn, the vector kbka+ kakb bisects the angle between a andb.
10. The direction cosines of a nonzero vector a
def= (a1, a2, a3) 2 R3 are the cosines of the angles↵,� and � between a and (1, 0, 0), (0, 1, 0) and (0, 0, 1), respectively. Express the directioncosines cos ↵, cos � and cos � in terms of a1, a2 and a3.
11. A student lifts a 2 kg textbook (with negligible acceleration) to a height of 1.8 m to place iton a bookshelf.
(a) How much work does the student do on the textbook?
(b) How much work does the force of gravity do on the textbook?
(c) What is the total work done by both of the forces acting on the textbook?
12. A math professor pushes a filing cabinet whose mass is 85 kg at a constant speed across acarpeted floor for a distance of 3.1 m. The carpet exerts a frictional force on the cabinetproportional to cabinet’s weight with constant of proportionality 0.22.
(a) How much work does the professor do on the cabinet?
(b) How much work does the frictional force do on the cabinet?
(c) How much work does gravity do on the cabinet?
(d) How much work does the carpet do on the cabinet (excluding the frictional force)?
13. Find the work done in pushing a handtruck loaded with 230 kg of math textbooks 13 m upa ramp inclined 30� from horizontal.

74 CHAPTER 2. THE INNER PRODUCT
14. A winch pulls a crate with mass 15 kg a distance 5.7 m up a frictionless ramp to a height 2.5m above its starting point.
(a) What force does the winch exert on the crate?(b) How much work is done by the winch on the crate?(c) How much work is required to lift the crate vertically upward through a height of 2.5 m?

Chapter 3
Systems of Linear Equations
3.1 Systems of Linear Equations
Objectives
• Introduce systems of linear equations and their solution sets.
• Solve systems of linear equations by applying two operations to the equations in the system:
– multiplying both sides of an equation by a nonzero scalar, and/or
– adding or subtracting the left- and right-hand sides of one equation to/from the left- andright-hand sides, respectively, of another equation.
• Introduce the fundamental questions of consistency and uniqueness of solutions.
In Sections 1.6 and 1.7 we encountered standard linear equations in two and three variables,respectively. Now we extend our consideration of linear equations to more than three variables.
Definition 3.1.1. A linear equation is an equation of the form
a1x1 + a2x2 + a3x3 + · · ·+ an
xn
= b
where n is a positive integer and a1, . . . , an
and b are scalars.
Definition 3.1.2. Let m and n be positive integers. A system of m linear equations in nvariables (or an m⇥ n linear system) is a collection of m linear equations
8>>>>>><
>>>>>>:
a1,1x1 + · · ·+ a1,j
xj
+ · · ·+ a1,n
xn
= b1...
ai,1x1 + · · ·+ a
i,j
xj
+ · · ·+ ai,n
xn
= bi
...a
m,1x1 + · · ·+ am,j
xj
+ · · ·+ am,n
xn
= bm
75

76 CHAPTER 3. SYSTEMS OF LINEAR EQUATIONS
where bi
are scalars for i = 1, . . . ,m, and ai,j
are scalars for i = 1, . . . ,m and j = 1, . . . , n. Thescalars a
i,j
are called the coe�cients of the system.
Definition 3.1.3. A solution of a linear system8>>>>>><
>>>>>>:
a1,1x1 + · · ·+ a1,j
xj
+ · · ·+ a1,n
xn
= b1...
ai,1x1 + · · ·+ a
i,j
xj
+ · · ·+ ai,n
xn
= bi
...a
m,1x1 + · · ·+ am,j
xj
+ · · ·+ am,n
xn
= bm
is a vector (x1, . . . , xn
) in Rn or Cn such that the components x1, . . . , xn
satisfy each equation inthe system.
Definition 3.1.4. The solution set of a linear system is the set of all solutions of the system.
To solve a linear system is to find the system’s solution set.
Example 3.1.5. Let a, b and c be real numbers so that at least one of a and b is nonzero. Thesolution set of the 1⇥ 2 linear system
ax + by = c
is a line in R2.
Example 3.1.6. Let a, b, c and d be real numbers so that at least one of a, b and c is nonzero. Thesolution set of the 1⇥ 3 linear system
ax + by + cz = d
is a plane in R3.
Our goal is to solve linear systems.
Definition 3.1.7. Two linear systems are equivalent if their solution sets are equal.
Our strategy for solving a linear system will be to transform the system into an equivalentsystem whose solution set is more apparent. To obtain an equivalent system we will apply twooperations to the equations in the system:
• Multiply both sides of an equation by a nonzero scalar.
• Add or subtract the left- and right-hand sides of one equation in the system to the left- andright-hand sides, respectively, of another equation in the system.
The following theorem shows that each of these operations produces a system equivalent to theoriginal. Often we combine these two operations in one step: adding a nonzero multiple of the left-and right-hand sides of one equation in the system to the left- and right-hand sides, respectively,of another equation in the system.
Theorem 3.1.8. Let ai,j
and bi
be scalars for all i = 1, . . . ,m and j = 1, . . . , n.

3.1. SYSTEMS OF LINEAR EQUATIONS 77
(i) Let c be a nonzero scalar. The linear system8>>>>>><
>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
ai,1x1 + · · · + a
i,n
xn
= bi
...a
m,1x1 + · · · + am,n
xn
= bm
is equivalent to the linear system8>>>>>><
>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
c(ai,1x1) + · · · + c(a
i,n
xn
) = cbi
...a
m,1x1 + · · · + am,n
xn
= bm
for all i = 1, . . . ,m.
(ii) The linear system 8>>>>>>>>>>><
>>>>>>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
ai,1x1 + · · · + a
i,n
xn
= bi
...a
k,1x1 + · · · + ak,n
xn
= bk
...a
m,1x1 + · · · + am,n
xn
= bm
is equivalent to the linear system8>>>>>>>>>>><
>>>>>>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
ai,1x1 + · · · + a
i,n
xn
= bi
...(a
k,1 ± ai,1)x1 + · · · + (a
k,n
± ai,n
)xn
= bk
± bi
...a
m,1x1 + · · · + am,n
xn
= bm
for all i = 1, . . . ,m and all k = 1, . . . ,m.
Proof.
(i) Let c be a nonzero scalar. Let i 2 {1, . . . ,m}. The strategy of the proof is to show that everysolution of the original system is a solution of the transformed system and that every solutionof the transformed system is a solution of the original system.

78 CHAPTER 3. SYSTEMS OF LINEAR EQUATIONS
Let (x1, . . . , xn
) be a solution of
8>>>>>><
>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
......
ai,1x1 + · · · + a
i,n
xn
= bi
......
...a
m,1x1 + · · · + am,n
xn
= bm
For all l 2 {1, . . . ,m} such that l 6= k,
al,1x1 + · · ·+ a
l,n
xn
= bl
and
(cai,1)x1 + · · ·+ (ca
i,n
)xn
= c(ai,1x1 + · · ·+ a
i,n
xn
)= cb
i
Thus, (x1, . . . , xn
) is a solution of
8>>>>>><
>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
......
c(ai,1x1) + · · · + c(a
i,n
xn
) = cbi
......
...a
m,1x1 + · · · + am,n
xn
= bm
Conversely, let (x1, . . . , xn
) be a solution of
8>>>>>><
>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
......
c(ai,1x1) + · · · + c(a
i,n
xn
) = cbi
......
...a
m,1x1 + · · · + am,n
xn
= bm
For all l 2 {1, . . . ,m} so that l 6= k,
al,1x1 + · · ·+ a
l,n
xn
= bl
and
ai,1x1 + · · ·+ a
i,n
xn
= (1/c)(c(ai,1x1) + · · ·+ c(a
i,n
xn
))= (1/c)cb
i
= bi
3.1. SYSTEMS OF LINEAR EQUATIONS 79
Thus, (x1, . . . , xn
) is a solution of8>>>>>><
>>>>>>:
a1,1x1 + · · · + a1,n
xn
= b1...
......
ai,1x1 + · · · + a
i,n
xn
= bi
......
...a
m,1x1 + · · · + am,n
xn
= bm
Therefore, the two linear systems are equivalent.
(ii) Exercise.
The following examples illustrate this approach to solving linear systems.
Example 3.1.9. Solve the system8<
:
x � 2y � 7z = �16�x + 7y + 17z = 362x � y � 6z = �14
2
0
2
x
2
0
2y
1
2
3
z
-
-
Figure 3.1: Example 3.1.9
Solution. Adding the left- and right-hand sides of equation 1 to those of equation 2,8<
:
x � 2y � 7z = �165y + 10z = 20
2x � y � 6z = �14
Subtracting twice the left- and right-hand sides of equation 1 from those of equation 3,8<
:
x � 2y � 7z = �165y + 10z = 203y + 8z = 18