an analysis method for the correlation between …docs.trb.org/prp/13-0208.pdf1 an analysis method...
TRANSCRIPT

Zhang, Qin, Cheng, Jia, Xing 1
An Analysis Method for the Correlation between Catenary Irregularities 1
and Pantograph-catenary Contact Force 2
Yuan Zhang 3
State key laboratory of rail traffic control and safety, Beijing Jiaotong University 4
School of Traffic and Transportation, Beijing Jiaotong University 5
No.3 Shang Yuan Cun, Hai Dian District, Beijing, China 6
Phone: 86-10-51683973 7
Fax: 86-10-51684081 8
Email: [email protected] 9
Yon Qin 10
State key laboratory of rail traffic control and safety, Beijing Jiaotong University 11
No.3 Shang Yuan Cun, Hai Dian District, Beijing, China 12
Phone: 86-10-51683846 13
Fax: 86-10-51683846 14
Email: [email protected] 15
Xiao-qing Cheng 16
State key laboratory of rail traffic control and safety, Beijing Jiaotong University 17
No.3 Shang Yuan Cun, Hai Dian District, Beijing, China 18
Phone: 86-10-51684081 19
Fax: 86-10-51684081 20
Email: [email protected] 21
Li-min Jia 22
State key laboratory of rail traffic control and safety, Beijing Jiaotong University 23
No.3 Shang Yuan Cun, Hai Dian District, Beijing, China 24
Phone: 86-10-51683824 25
Fax: 86-10-51683824 26
Email: [email protected] 27
Zong-yi Xing (corresponding author) 28
School of Mechanical Engineering, Nanjing University of Science and Technology 29
200 Xiao Ling Wei Street, Nanjing, China 30
Phone: 86-10-51683973 31
Fax: 86-10-51684081 32
Email: [email protected] 33
34
Word count: 4299 35
Figures and Tables: 12 (x 250) 3000 36
Total: 7299 37
38
Submission date: June 26, 201239
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 2
ABSTRACT 40
Pantograph-catenary contact force provides the main basis for evaluation of current quality collection; however, 41
the pantograph-catenary contact force is largely affected by the catenary irregularities. To analyze the correlated 42
relationship between catenary irregularities and pantograph-catenary contact force, a method based on NARX 43
(Nonlinear Auto-Regressive with eXogenous input) neural networks was developed. First, to collect the test data 44
of catenary irregularities and contact force, the pantograph/catenary dynamics model was established and 45
dynamic simulation was conducted using MATLAB/Simulink. Second, catenary irregularities were used as the 46
input to NARX neural network and the contact force was determined as output of the NARX neural network, in 47
which the neural network was trained by an improved training mechanism based on the regularization algorithm. 48
Third, the simulation results and the comparison with other algorithms indicate the validity and superiority of 49
the proposed approach. 50
Key words: Catenary irregularities; Pantograph-catenary contact force; NARX neural networks; Correlation 51
analysis 52
1 INTRODUCTION 53
With the development of the high-speed railway, electric traction has become the dominant mode providing the 54
train power. It is the key to protecting the safety of running high-speed railways. The EMU (Electric Multiple 55
Units) assure that the current remains in contact with the catenary stably by use of a pantograph-head sliding 56
plate (1, 2). The catenary irregularities are an important cause of current collection performance degradation 57
which may cause impact when the pantograph slips off the catenary. The impact would cause vibration of the 58
pantograph catenary and reduce the current collection performance. The pantograph-catenary contact force is the 59
basic index to measure the quality of current collection, and an inappropriate pantograph-catenary contact force 60
is the main cause of offline pantograph and contact wire fatigue damage (3). In certain operation conditions, 61
pantograph-catenary contact force is influenced by catenary irregularities which would be dominant in high 62
speed, and slight irregularities may cause serious fluctuation of contact force even leading to the pantograph 63
coming off the catenary (4,5). Therefore it is necessary to analyze the relationship of catenary irregularities and 64
pantograph-catenary contact forces. 65
Some scholars studied preliminary correlation analyses concerning the catenary irregularities and 66
pantograph-catenary contact forces. Nagasaka et al (4) designed the measurement and estimation device of 67
catenary irregularities for analyzing the effect on Pantograph-catenary contact force. Han et al (5) analyzed the 68
influence of rigid catenary irregularities on the contact force, and pointed out that the catenary irregularities are 69
the main factors to determine the current collection performance of rigid contact suspension. Takemura et al (6)
70
researched the pantograph vertical vibration which is caused by rigid suspension contact irregularities and 71
proposed the vibration frequency formula. Usuda (7, 8, 9) presented an accurate method to measure the 72
pantograph-catenary contact force, and discussed the relationship between the catenary abrasion and the 73
pantograph-catenary contact force and predicted the abrasion and strain of catenary in high-speed railways. 74
Bennet et al (10) studied the pantograph-catenary contact force detection and a relevant mechanical calculation 75
method. Zhang (11) described the catenary irregularities with full cosine wave, and detected the irregularities 76
which the catenary brings to the contact force in cases of a continuous harmonic wave and a single wave. Xie 77
(12) constructed the pantograph-catenary dynamic model and analyzed the power spectrum of catenary 78
irregularities. All of the above studies focus on the physical detection or impact analysis from single catenary 79
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 3
irregularities only, and the research concerning the correlation analysis between catenary irregularities and 80
pantograph-catenary contact force remains at the preliminary qualitative analysis phase, The quantitative 81
correlation analysis between the two is still lacking. 82
The system of catenary irregularities and pantograph-catenary contact force is a typical complex 83
nonlinear dynamic system. Generally it can be described approximately by simplified simultaneous differential 84
equations, but the result has some deviation from the actual system. The neural network can be used to describe 85
any nonlinear system, and has a strong self-learning and fault tolerance ability. For these reasons NARX neural 86
network (13) has been employed to describe the complex dynamic relationship between catenary irregularities 87
and pantograph-catenary contact force. Setting the input of the network are the catenary irregularities and the 88
output is pantograph-catenary force to correlate the analysis of the relationship between them. 89
This paper is organized as follows: section 1 provides some basic descriptions of catenary irregularities 90
and pantograph-catenary contact force, and describes the test data collection methods; section 2 presents NARX 91
neural network, and discusses in detail the regularization algorithm; section 3 conducts the simulation tests 92
based on the method proposed and analyzes the test result; Finally, section 4 makes some conclusions and the 93
direction of future research directions is also given. 94
2 CATENARY IRREGULARITIES AND PANTOGRAPH-CATENARY CONTACT FORCE 95
2.1 Basic Concepts 96
There is no clear common definition or measurement indicator for catenary irregularities. The authors of 97
reference (5) proposed that the rigid catenary irregularities mean that the deviation of the contact surface extends 98
along the current flow with the ideal smooth contact surface, and as a function of the value of the amplitude, 99
divided it into large and small irregularities. Researchers in reference (14) studied the catenary irregularities in 100
elastic suspension mode which is commonly used in high-speed railway , and defined the elastic catenary 101
irregularities both in the broad and narrow sense: The catenary irregularities are the deviation between the actual 102
geometric dimensions and the ideal geometric dimensions of the contact surface, and the definition focuses on 103
researching the influence of catenary abrasive hard spots, hard bend on pantograph vibration and current 104
collection performance; in the broad sense, besides catenary geometric factors, the factors such as the catenary 105
tension, the elastic uniformity, catenary structures, wire material which may cause deviation between the actual 106
contact force and ideal current collection value are also included to define the catenary irregularities. 107
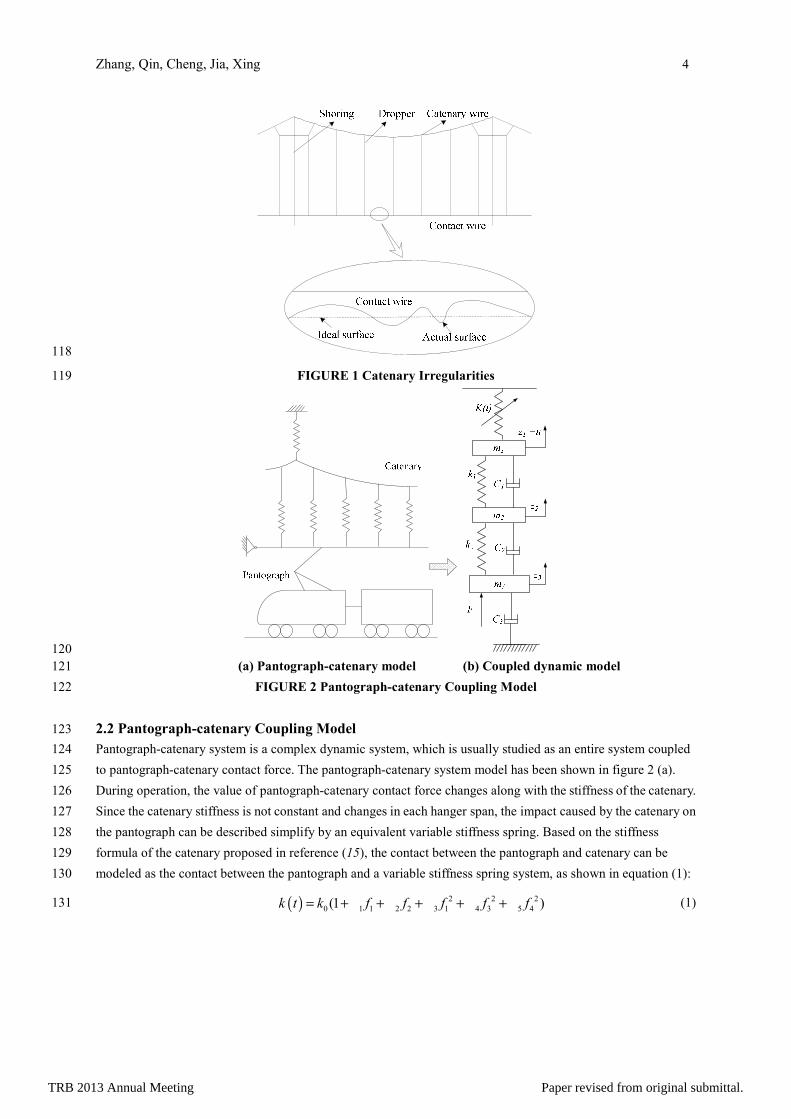
Relative to the above definitions, the influence of slight irregularities on the pantograph-catenary contact 108
force is the only consideration in this paper. It means that in this paper the catenary irregularities are the 109
deviation of the catenary actual geometric state along the tangential direction from the theoretical state which is 110
shown in figure 1. Since the slight catenary irregularities are essentially random processes, the random noises at 111
certain ranges of amplitude have been employed to approximate the irregularities. 112
Pantograph-catenary contact force is the vertical pressure generated during the process as the 113
pantograph rises up to contact the catenary, which also can be interpreted as the uplift force produced by the 114
pantograph. In order to get a stable current performance, the electric locomotive requires a constant pressure 115
between the pantograph and catenary during the operation. However, in actual operation due to the catenary 116
irregularities and aerodynamics, the pantograph-catenary contact force keeps changing constantly. 117
TRB 2013 Annual Meeting Paper revised from original submittal.
Zhang, Qin, Cheng, Jia, Xing 4
118
FIGURE 1 Catenary Irregularities 119
120
(a) Pantograph-catenary model (b) Coupled dynamic model 121
FIGURE 2 Pantograph-catenary Coupling Model 122
2.2 Pantograph-catenary Coupling Model 123
Pantograph-catenary system is a complex dynamic system, which is usually studied as an entire system coupled 124
to pantograph-catenary contact force. The pantograph-catenary system model has been shown in figure 2 (a). 125
During operation, the value of pantograph-catenary contact force changes along with the stiffness of the catenary. 126
Since the catenary stiffness is not constant and changes in each hanger span, the impact caused by the catenary on 127
the pantograph can be described simplify by an equivalent variable stiffness spring. Based on the stiffness 128
formula of the catenary proposed in reference (15), the contact between the pantograph and catenary can be 129
modeled as the contact between the pantograph and a variable stiffness spring system, as shown in equation (1): 130
( ) 2 2 2
0 1 1 2 2 3 1 4 3 5 4(1 )k t k f f f f fa a a a a= + + + + + (1) 131
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 5
where: 1
2cos( )
vf t
L
p= ;2
1
2cos( )
vf t
L
p= ;3 cos( )
vf t
L
p= ; 4
1
cos( )v
f tL
p= ;v is the velocity (m/s); L is the catenary 132
hanger span (m); L1 the distance between the catenary droppers (m); k0 is the average stiffness (N/m); 133
α1,,α2 ,α3 ,α4 ,α5 are stiffness difference coefficients. 134
The pantograph is composed of the upper and lower frame and the slide plate, and generally its model is 135
the equivalent mass model. Based on the principle of kinetic energy equivalence, it can be simplified the original 136
structure into an equivalent lumped mass model. According to the number of lumped masses, the lumped mass 137
model can be divided into unitary, binary, ternary and multi-models. The ternary model (16)
was adopted in this 138
paper, which is shown in figure 2 (b), and the dynamic equations of pantograph are as follow: 139
1 1 1 1 2 1 1 2 1( ) ( ) ( ) ( )( ) 0m z y k z z c z z K t z u+ + - + - + + =ɺɺɺɺ ɺ ɺ
(2) 140
2 2 1 2 1 2 2 3 1 2 1 2 2 3( ) ( ) ( ) ( ) 0m z k z z k z z c z z c z z+ - + - + - + - =ɺɺ ɺ ɺ ɺ ɺ (3) 141
3 3 2 3 2 2 3 2 3 3( ) ( )m z k z z c z z c z F+ - + - + =ɺɺ ɺ ɺ ɺ (4)
142
where K(t) is the catenary equivalent stiffness which is shown in equation (1); F is the static uplift force (N); u 143
denotes the catenary irregularities; m1,m2,m3 are the pantograph head equivalent mass, the upper frame equivalent 144
mass, and the lower frame equivalent mass respectively; k1,k2 are the pantograph head stiffness and the stiffness 145
between upper and lower frame respectively; c1、c2、c3 are the pantograph head damping, upper and lower frame 146
damping and the damping between the lower frame and the vehicle body respectively. 147
Based on the catenary and pantograph model, the catenary irregularity was introduced by the catenary 148
dynamic uplifting quality, and the pantograph-catenary coupled dynamic model was established, and the testing 149
data of catenary irregularities and pantograph-catenary contact force was obtained by dynamic simulation using 150
MATLAB / Simulink.
151
3 NARX NEURAL NETWORKS AND REGULARIZATION ALGORITHM 152
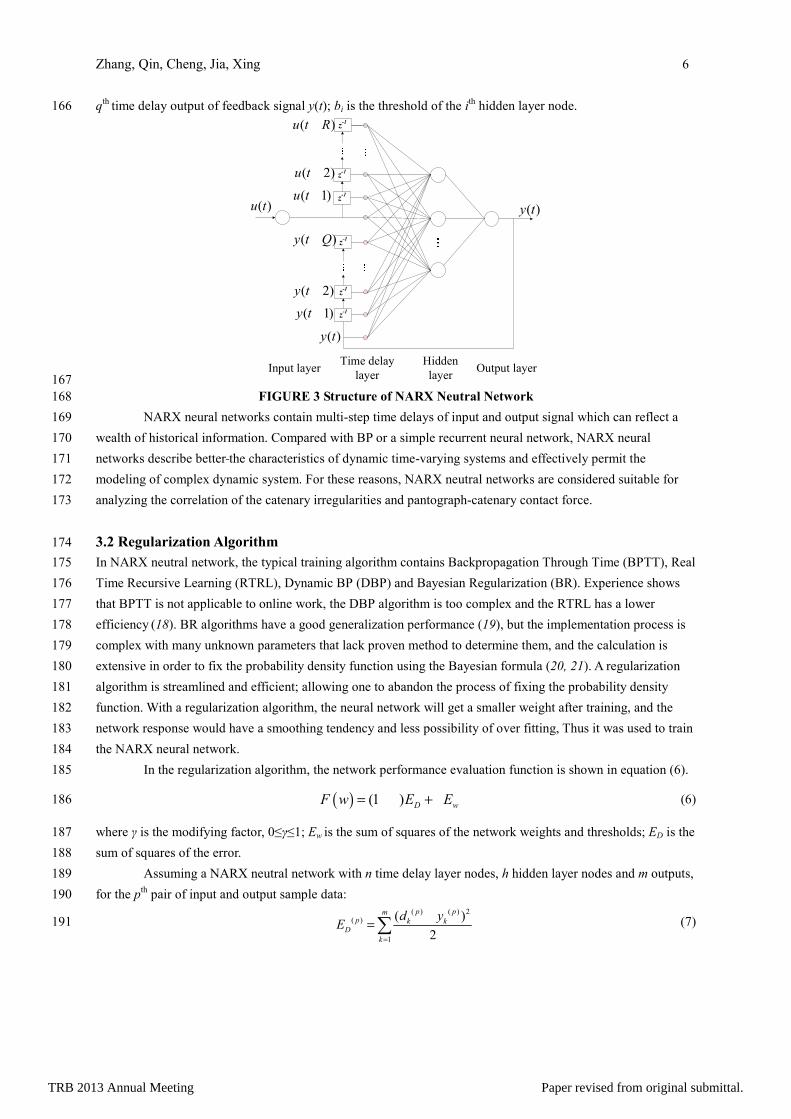
3.1 NARX Neutral Network 153
NARX can be regarded as a BP neural network with time delay input and delayed feedback from the output to 154
the input (17). The single-input single-output NARX neural network can be divided into four layers: input layer, 155
time delay layer, hidden layer and output layer as shown in figure 3. Among them, the input layer is used to get 156
the signal without any calculation; the delay layer is the multi-step delay operator of the network, which is used 157
for time delay of the input and output feedback signals; the function of the hidden layer is to do a nonlinear 158
process for the time delay signals with activation function; and the output layer is used to provide a linear 159
weighting for the output of the hidden layer and to get the final network output. Setting each input delay as P 160
and the output delay as Q, the output of the ith
hidden node is given by 161
0 0
( ) ( )Q
i
R
ir iq i
r q
O f w u t p w y t q b= =
= - + - +
∑ ∑ (5) 162
where, f is the activation function of the hidden layer nodes; wir is the weight between the ith
hidden layer node 163
and the rth
time delay layer node of the input signal; u(t-r) is the rth
time delay output of input signal u(t); wiq is 164
the weight between the ith
hidden layer node and the qth
time delay layer node of the output signal; y(t-q) is the 165
TRB 2013 Annual Meeting Paper revised from original submittal.
Zhang, Qin, Cheng, Jia, Xing 6
qth
time delay output of feedback signal y(t); bi is the threshold of the ith
hidden layer node. 166
z-1
z-1
z-1
( )u t( 1)u t -
( 2)u t -
( )u t R-
( )y t
( 1)y t -
( 2)y t -
( )y t Q-
( )y t
Input layerTime delay
layer
Hidden
layerOutput layer
z-1
z-1
z-1
167
FIGURE 3 Structure of NARX Neutral Network 168
NARX neural networks contain multi-step time delays of input and output signal which can reflect a 169
wealth of historical information. Compared with BP or a simple recurrent neural network, NARX neural 170
networks describe better the characteristics of dynamic time-varying systems and effectively permit the 171
modeling of complex dynamic system. For these reasons, NARX neutral networks are considered suitable for 172
analyzing the correlation of the catenary irregularities and pantograph-catenary contact force. 173
3.2 Regularization Algorithm 174
In NARX neutral network, the typical training algorithm contains Backpropagation Through Time (BPTT), Real 175
Time Recursive Learning (RTRL), Dynamic BP (DBP) and Bayesian Regularization (BR). Experience shows 176
that BPTT is not applicable to online work, the DBP algorithm is too complex and the RTRL has a lower 177
efficiency (18). BR algorithms have a good generalization performance (19), but the implementation process is 178
complex with many unknown parameters that lack proven method to determine them, and the calculation is 179
extensive in order to fix the probability density function using the Bayesian formula (20, 21). A regularization 180
algorithm is streamlined and efficient; allowing one to abandon the process of fixing the probability density 181
function. With a regularization algorithm, the neural network will get a smaller weight after training, and the 182
network response would have a smoothing tendency and less possibility of over fitting, Thus it was used to train 183
the NARX neural network. 184
In the regularization algorithm, the network performance evaluation function is shown in equation (6). 185
( ) (1 ) D wF w E Eg g= - + (6) 186
where γ is the modifying factor, 0≤γ≤1; Ew is the sum of squares of the network weights and thresholds; ED is the 187
sum of squares of the error. 188
Assuming a NARX neutral network with n time delay layer nodes, h hidden layer nodes and m outputs, 189
for the pth
pair of input and output sample data: 190
( ) ( )
1
2( ) ( )
2
p pmp k k
k
D
d yE
=
-=∑ (7) 191
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 7
( ) ( )2 2( ) ( )
1 1
)
1
(
1
1[ ]
h n m hp
w
j i k j
p p
ij jk
w
E w wN = = = =
= +∑∑ ∑∑ (8) 192
where dk is the target output of the kth
output layer node; yk is the network output of the kth
output layer node; Nw 193
is the number of the adjustable weight of the neural network; wij is the weight between the ith
time delay layer 194
node and the jth
hidden layer node; wjk is the weight between the jth
hidden layer node and the kth
output layer 195
node. 196
Using the gradient descent method to adjust the weights, and setting the hidden layer activation 197
function 2( ) 1
1h x
f xe l-= -
+ and the output layer transfer function fo(x) = x, and the weight adjustment of the 198
output layer and the hidden layer, the resultant weight adjustments are shown in equations (9) and (10) as. 199
( ) ( ) ( )( ) ( ) ( ) ( 1)21
pp p p p
jk k k Hj jk
w
w d y x wN
g g -D = - × - × + × × (9) 200
( ) ( ) ( ) ( )( ) ( ) ( )( ) ( )
1
21 12
mp p p p p p
ij k k jk H j I i
k
w d y w x xlg
=
D = - - × - ×××∑( 1)2 p
ij
w
wN
g -+ × × (10) 201
Then, the weights of the output layer and the hidden layer after adjusting become 202
( ) ( 1) ( )p p p
jk jk jkw w wh-= - D (11) 203
( ) ( 1) ( )p p p
ij ij ijw w wh-= - D (12) 204
where xHj is the input of the jth
hidden layer node; xIi is the output of the ith
input layer node; η is the learning 205
rate. 206
4 EXPERIMENT AND RESULTS 207
4.1 Data Collection and Processing 208
A typical elastic catenary suspension in China was taken as an illustrative example and the pantograph-catenary 209
coupling dynamic model was simulated by MATLAB / Simulink. The parameters in catenary stiffness equation 210
(1) are v=250km/h, L = 60m, L1=8m, k0 = 1925N/m, α1 = 0.0755, α2 = - 0.0735, α3 = - 0.1459, α4 = - 0.0575, 211
α5=0.0699. The parameters in the pantograph ternary model are F=90N, m1=6.21kg, m2=7 kg, m3=12 kg, 212
k1=2650N/m, k2=10000N/m, c1=100N·s/m, c2=100N·s/m, c3=70N·s/m. Catenary irregularities u result from 213
random noise signal which averages zero and the amplitude range is [-0.5mm to + 0.5mm]. 214
Form the computer simulation model, we have collected 2000 pairs of input and output data at the 215
simulation time of 20s for a sampling frequency of 100Hz. All pairs of the data were separated into two groups: 216
the first group with 1300 pairs of data is employed to train the NARX neutral network and the remaining 700 217
data pairs are used to test the neutral network. To reflect the influence on the pantograph-catenary contact force 218
caused by other factors, a white Gaussian noise of which the amplitude is 5% of the contact force was overlaid. 219
The collected data are shown in figure 4; figure 4(a) portrays the catenary irregularities data and figure 4(b) the 220
pantograph-catenary contact force data. In order to improve the learning efficiency and to speed up the 221
convergence of the neural network, all of the input data and output data were normalized with the following 222
functions. 223
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 8
min
max min
scal x xx
x x
-=-
(13) 224
where x, xmax and xmin are the original, the maximum and the minimum values respectively, and xscal
is the value 225
which has been processed. 226
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
(a) Inputs:catenary irregularities time / s
Catenary irregularities / mm
0 2 4 6 8 10 12 14 16 18 20
60
80
100
120
(b) Outputs:pantograph-catenary contact forcestime / s
Pantograph-catenary
contact forces / N
227
FIGURE 4 Inputs and Outputs Data 228
4.2 Correlation Analysis 229
To evaluate the performance of the obtained neural network, the RMSE (Root Mean Square Error) which has 230
been shown in equation (14) is employed to represent the precision of the obtained network. The network has a 231
higher accuracy as the RMSE decreases. However, since the values of RMSE are generally small, it is difficult 232
to evaluate the network performance visually, so the correlation coefficient R is introduced to assess the 233
correlation between the target outputs and the neural network outputs which are shown in equation (15). When 234
R is closer to 1, it shows the model would have a better accuracy and will be more similar to the actual system. 235
( ) ( ) ( ) 2
1
1, ( )
N
m M
l
RMSE y y y yN
l l=
= -∑ (14) 236
( )2
1
1
2
1
( )( )
,
( ) ( )
l
l
N
l
l
N N
l
M M
m
Ml
l
M
y y y y
R y y
y y y y
=
= =
- -=
- -
∑
∑ ∑
(15) 237
where, y is the target outputs, yM is the neural network outputs; N is the number of the data samples; y and 238
My are the averages of the y and yM samples, respectively. 239
First of all, to indicate the complex relationship between the catenary irregularities and the 240
Pantograph-catenary contact force, the experiment was carried out based on the BP neural network with the 241
Levenberg-Marquardt (LM) algorithm and the result is shown in TABLE 1. The training and the testing RMES 242
of the BP neural network are 0.1393 and 0.2401 respectively and the correlation coefficient R is 0.4274 and 243
0.1845 respectively. At the same time, figure 5 shows the comparison of the target outputs and the BP neural 244
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 9
network output. Among them, figure 5(a) shows the comparison of the training data samples while figure 5(b) 245
shows the comparison of the testing data samples. It can be seen that the BP neutral network cannot describe the 246
complex relationship between the catenary irregularities and the pantograph-catenary contact force. 247
TABLE 1 the Performance Index of Each Model 248
Models→
Indexes↓ BP Elman-LM NARX-R
Training RMSE 0.1393 0.1089 0.0533
Testing RMSE 0.2401 0.1189 0.1100
Training R 0.4274 0.7058 0.9384
Testing R 0.1845 0.6988 0.8029
0 200 400 600 800 1000 1200
0
0.5
1
Number of training samples
Norm
alized contact forces
(a) Outputs contrast of training samples
0 100 200 300 400 500 600 700
0
0.5
1
Number of testing samples
Norm
alized contact forces
(b) Outputs contrast of testing samples
Target outputs Neural network outputs
Target outputs Neural network outputs
y(l)
249
FIGURE 5 Comparisons of the Target Outputs and the BP Neutral Network Outputs 250
In order to demonstrate the effectiveness of the NARX neural network, both the NARX neural network 251
with a regularization algorithm (referred to as NARX-R) and the Elman neural network with the LM algorithm 252
(referred to as Elman-LM) were implemented. Based on the expert experience and trial and error method, for 253
NARX-R, the number of input and output delay steps was determined as 45 and the number of hidden layer 254
nodes was set to 17. With the Elman-LM, the number of hidden layer nodes was set at 20. 255
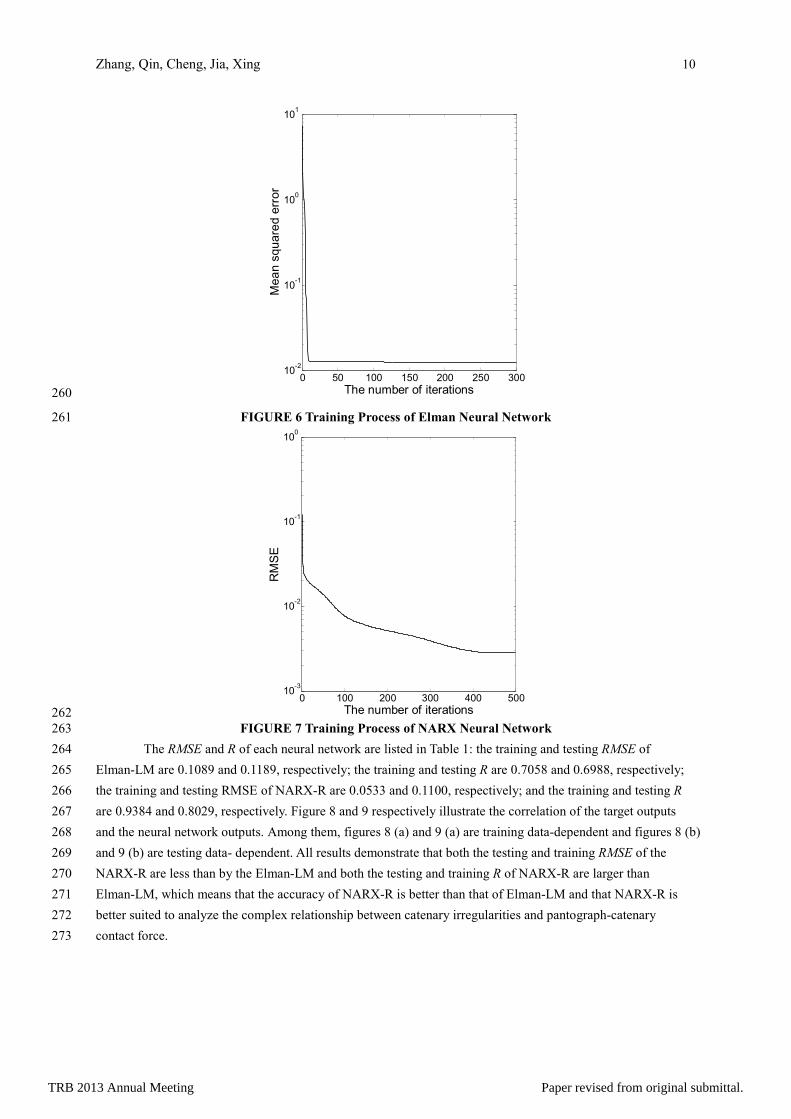
Figure 6 shows the curve of mean-squared training error using the iterative process of Elman-LM. 256
After 300 epochs training, the training error became stable. Figure 7 shows the training RMSE of NARX-R 257
changes with the iterations, which shows that the error was no longer reduced after 450 epochs. Therefore, the 258
number of iterations of Elman-LM and NARX-R were initialized to 300 and 500 respectively. 259
TRB 2013 Annual Meeting Paper revised from original submittal.
Zhang, Qin, Cheng, Jia, Xing 10
0 50 100 150 200 250 30010
-2
10-1
100
101
The number of iterations
Mean squared error
260
FIGURE 6 Training Process of Elman Neural Network 261
0 100 200 300 400 50010
-3
10-2
10-1
100
The number of iterations
RMSE
262
FIGURE 7 Training Process of NARX Neural Network 263
The RMSE and R of each neural network are listed in Table 1: the training and testing RMSE of 264
Elman-LM are 0.1089 and 0.1189, respectively; the training and testing R are 0.7058 and 0.6988, respectively; 265
the training and testing RMSE of NARX-R are 0.0533 and 0.1100, respectively; and the training and testing R 266
are 0.9384 and 0.8029, respectively. Figure 8 and 9 respectively illustrate the correlation of the target outputs 267
and the neural network outputs. Among them, figures 8 (a) and 9 (a) are training data-dependent and figures 8 (b) 268
and 9 (b) are testing data- dependent. All results demonstrate that both the testing and training RMSE of the 269
NARX-R are less than by the Elman-LM and both the testing and training R of NARX-R are larger than 270
Elman-LM, which means that the accuracy of NARX-R is better than that of Elman-LM and that NARX-R is 271
better suited to analyze the complex relationship between catenary irregularities and pantograph-catenary 272
contact force. 273
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 11
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Targets T
Outputs Y, Linear Fit: Y=(0.5)T+(0.26)
Outputs vs. Targets, R=0.70583
Data Points
Best Linear Fit
Y = T
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Targets T
Outputs Y, Linear Fit: Y=(0.62)T+(0.21)
Outputs vs. Targets, R=0.69882
Data Points
Best Linear Fit
Y = T
274
(a) Correlation of training data (b) Correlation of testing data 275
FIGURE 8 Correlation Analysis of the Target Outputs and Elman Neural Network Outputs 276
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Targets T
Outputs A, Linear Fit: A=(0.85)T+(0.08)
Outputs vs. Targets, R=0.93843
Data Points
Best Linear Fit
A = T
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Targets T
Outputs A, Linear Fit: A=(0.8)T+(0.14)
Outputs vs. Targets, R=0.80293
Data Points
Best Linear Fit
A = T
277
(a) Correlation of training data (b) Correlation of testing data 278
FIGURE 9 Correlation Analysis of the Target Outputs and NARX Neural Network Outputs 279
For delineating the performance of NAEX-R and Elman-LM more directly, the comparisons of the 280
target outputs and the neural network outputs of Elman-LM and NARX-R are shown in figures 10 and 11 in 281
which figures 10(a) and 11(a) are for the training data, and figures 10(b) and 11(b) are for the testing data. It is 282
thus clear that comparing with Elman-LM, the neural network outputs of NARX-R displays a better conformity 283
with the target outputs and can follow the tendency of the target outputs better. 284
In summary, the NARX-R method proposed in this paper can fit the characteristics of the complex 285
dynamic system better, and accurately achieve the correlation analysis of the catenary irregularities and 286
pantograph-catenary contact force. 287
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 12
0 200 400 600 800 1000 1200 1400
0
0.5
1
Number of training samples
Norm
alized contact forces
(a) Outputs contrast of training samples
Target outputs Neural network outputs
0 100 200 300 400 500 600 700
0
0.5
1
Number of testing samples
Norm
alized contact forces
(b) Outputs contrast of testing samples
Target outputs Neural network outputs
288
FIGURE 10 Comparisons of the Target Outputs and Elman Neural Network Outputs 289
0 200 400 600 800 1000 1200
0
0.5
1
Number of training samples
Norm
alized contact forces
(a) Outputs contrast of training samples
0 100 200 300 400 500 600 700
0
0.5
1
Number of testing samples
Norm
alized contact forces
(b) Outputs contrast of testing samples
Target outputs Neural network outputs
Target outputs Neural network outputs
290
FIGURE 11 Comparisons of the Target Outputs and NARX Neural Network Outputs 291
5 CONCLUSIONS 292
Based on the NARX neural network, a correlation analysis method is developed to analyze the complex 293
dynamic relation between the catenary irregularities and the pantograph-catenary contact force. In order to train 294
the NARX neural network, a pantograph-catenary coupling dynamic model is constructed to obtain the 295
experimental data of catenary irregularities and pantograph-catenary contact force and a regularization 296
algorithm is adopted. The simulation results and comparisons with other neural networks demonstrate the 297
effectiveness and validity of the proposed method. Further research efforts will be made toward including other 298
kinds of catenary irregularities and improvements of the structure of the NARX neural network and optimization 299
of the algorithm to enhance network performance. In addition, the experimental data collected in this paper is 300
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 13
obtained by using computer simulation model, so the real measurements of catenary irregularities and the 301
pantograph-catenary contact force will be needed to further verify the validity and improve the applicability of 302
the method. 303
ACKNOWLEDGEMENT 304
This research was sponsored by National Key Technology R&D Program of China (No. 2011BAG01B05) and 305
National High-tech R&D Program of China (863 Program, No. 2011AA110501) and the State Key Laboratory 306
of Rail Traffic Control and Safety (No. RCS2010ZZ002) of Beijing Jiaotong University. Their supports are 307
gratefully acknowledged. 308
REFERENCE 309
(1) A. Facchinetti, S. Bruni. Hardware-in-the-loop hybrid simulation of pantograph–catenary interaction. 310
Journal of Sound and Vibration, Vol. 331, No. 12, 2012, pp. 2783-2797. 311
(2) G. Poetsch, J. Evans, R. Meisinger, W. Kortüm, W. Baldauf, A. Veitl, J. Wallaschek. Pantograph/catenary 312
dynamics and control, Vehicle System Dynamics, Vol. 28, No. 2-3, 1997, pp. 159-195. 313
(3) K. Lee. Analysis of dynamic contact between overhead wire and pantograph of a high-speed electric train. 314
Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, Vol.221, 315
No. 2, 2007, pp. 157-166. 316
(4) S. Nagasaka, M. Aboshi. Measurement and Estimation of Contact Wire Unevenness. Quarterly Report of 317
RTRI, Vol.45, No. 2, 2004, pp. 86-91. 318
(5) Z. X. Han, G. L. Wang. Unevenness Analysis of Overhead Rigid Suspension Catenary. Journal of Railway 319
Engineering Society, No. 2, 2007, pp. 61-64. (In Chinese) 320
(6) T. Takemura, Y. Fujii, M. Shimizu. Characteristics of over-head rigid conductor line having T-type cross 321
section. Developments in Mass Transit Systems, Vol. 4, 1998, pp. 173-177. 322
(7) T. Usuda. The Pantograph Contact Force Measurement Method in Overhead Catenary System. World 323
Congress on Railway Research, 2008. http://www.uic.org/cdrom/2008/11_wcrr2008/pdf/S.1.4.3.4.pdf. 324
Accessed September 9, 2011 325
(8) T. Usuda. Prediction of Contact Wire on High-speed Railways. Railway Technology Avalanche. Vol. 36, 326
2011, pp.214. 327
(9) T. Usuda. Estimation of Wear and Strain of Contact Wire Using Contact Force of Pantograph. Quarterly 328
Report of RTRI. Vol.48, No. 3, 2007, pp.170-175. 329
(10) Bennet, J., Montesinos, J., Cuartero, F., Rojo, T. Arias. E Advanced Algorithm to Calculate Mechanical 330
Forces on a Catenary. Computers in Railways IX, 2009, pp.857-868. 331
(11) W. H. Zhang, G. M. Mei, L. Q. Chen. Analysis of the influence of catenary’s sag and irregularity upon the 332
quality of current-feeding. Journal of the China railway Society. Vol. 22, No. 6, 2000, pp. 50-54. (In 333
Chinese) 334
(12) J. Xie, Z. G. Liu, Z. W. Han. Pantograph and Overhead Contact Line Coupling Dynamic Model Simulation 335
and Analysis of Imbalance of Overhead Contact Line. Electric Railway, No. 6, 2009, pp. 23-26,29. (In 336
Chinese) 337
(13) Siegelmann H. T. Computational capabilities of recurrent NARX neural networks. IEEE Transactions on 338
Systems, Man, and Cybernetics, Part B: Cybernetics, Vol. 27, No. 2, 1997, pp. 208-215. 339
TRB 2013 Annual Meeting Paper revised from original submittal.

Zhang, Qin, Cheng, Jia, Xing 14
(14) Z. G. Liu, Z. W. Han. Power Spectrum Research of Catenary Irregularities of Electrified Railway. Electric 340
Railway. No. 1, 2011, pp. 1-3. (In Chinese) 341
(15) J. B. Guo. Stability of Current Collection and Control for High-Speed Locomotive. Beijing. PhD thesis. 342
Beijing Jiaotong University. 2006. (In Chinese) 343
(16) T. X. Wu, M. J. Brennan. Dynamic stiffness of a railway overhead wires system and its effect on 344
pantograph-catenary system dynamics. Journal of Sound and Vibration, Vol. 3, 1999, pp. 483-502. 345
(17) S. Haykin. Neural Networks: A Comprehensive Foundation. 2nd ed. Prentice-Hall Inc., New Jersey, 1999. 346
(18) Y. Q. Liu, G. F. Ma, Z. Shi. NARX network for dynamic system identification in adaptive inverse control. 347
Journal of Harbin Institute of Technology. Vol. 37, No. 2, 2005, pp. 173-176. (In Chinese) 348
(19) Sumit, G., Gyanendra, K. G. Time – Delay Simulated Artificial Neural Network Models for Predicting 349
Shelf Life of Processed Cheese. International Journal of Intelligent Systems and Applications, Vol.4, No.5, 350
2012, pp. 30-37. 351
(20) P. Kumar, S. N. Merchant, U. B. Desai. Improving performance in pulse radar detection using Bayesian 352
regularization for neural network training. Digital signal processing, Vol. 14, 2004, pp. 438-448. 353
(21) K. Hirschen, M. Schafer. Bayesian regularization neural networks for optimizing fluid flow processes. 354
Computer methods in applied mechanics and engineering, Vol. 195, 2006, pp.481-500. 355
TRB 2013 Annual Meeting Paper revised from original submittal.