an innovative wireless sensor based vital … · an innovative wireless sensor based vital train...
TRANSCRIPT

AN INNOVATIVE WIRELESS SENSOR BASED VITAL TRAIN DETECTION AND WARNING SYSTEM
Ahtasham Ashraf*, David Baldwin and Xin Zhou Central Signal, LLC
2912 Syene Rd, Madison, WI 53713 Tel: (608) 237 1780, Fax: (608) 237 1817
{aashraf, dbaldwin, xzhou}@centralsig.com *corresponding author, Total 5816 words
ABSTRACT Adapting innovative and novel technologies for vital, fail-safe and reliable operation in a railroad
environment requires selecting a technology that is well suited to the purpose. Developing
methods to assure vital operation is equally important. Central Signal has developed a method of
vitally detecting trains using anisotropic magneto-resistive (AMR) sensors, low power spread
spectrum radios, and a central vital processing unit all powered by photo-voltaic/battery power
systems. The proposed low-cost, power-efficient wireless sensors process multi-dimensional
AMR sensor waveform data to generate a unique train signature and provide vital train detection.
This train detection and signature identification by multiple wireless sensor nodes distributed
within range of a railroad track provides the basis for a vital train detection system. A Vital
Processing Device communicates with these wireless sensors and provides an output signal
consistent with conditional state of the train detection zone. Time defined sensor polling, of
paired sensors assure a reliable and vital system that will revert to safest condition should any
element or device fail to perform it intended function. The detection method includes a unique
application of Dynamic Time Warping (DTW) method for matching the essential features of a
train signature. This train detection and signature identification by multiple wireless sensors
provides the basis for a vital train detection system.
1. INTRODUCTION AND BACKGROUND
Train detection is the fundamental task of any railroad signal system. Acceptable methods for
accomplishing this essential task must be based on designs that guarantee a train occupying a
detection zone will be detected. A corollary requirement is in the event that any element
necessary to the detection of a train fails to perform its intended function, the train detection
device must revert to safest condition. Signal engineers call devices that incorporate these
design requirements “vital” devices and describe them as “fail-safe” meaning, literally, that these
devices become safe when they fail. “Safe” means that the device reverts to its most restrictive
condition. The Federal Railroad Administration requires that all vital circuits be designed on the
closed circuit principle (1).
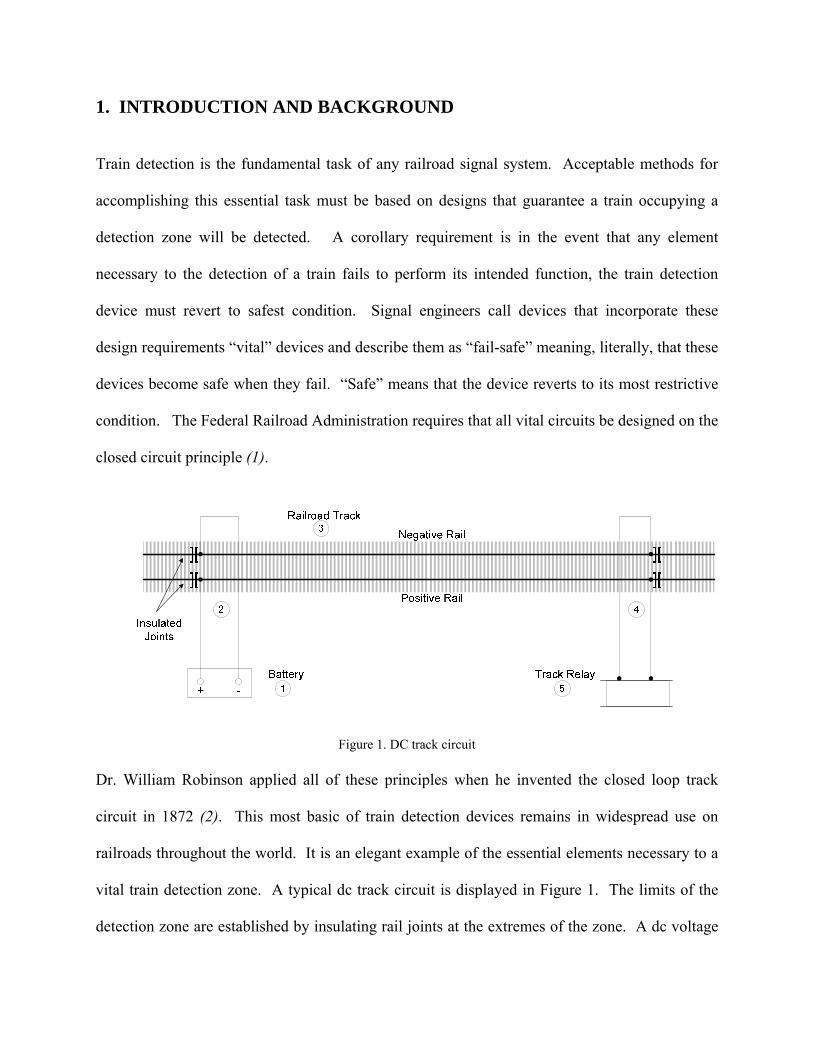
Figure 1. DC track circuit Dr. William Robinson applied all of these principles when he invented the closed loop track
circuit in 1872 (2). This most basic of train detection devices remains in widespread use on
railroads throughout the world. It is an elegant example of the essential elements necessary to a
vital train detection zone. A typical dc track circuit is displayed in Figure 1. The limits of the
detection zone are established by insulating rail joints at the extremes of the zone. A dc voltage
is connected to the track rails at one end of the zone and a dc relay is connected to the track rails
at the other end of the zone. A dc current will flow through the positive rail, through the relay
coil and return to the dc voltage source through the negative rail. This is a closed loop or closed
circuit design. The elements of the detection zone are: 1) the voltage source, 2) the connection to
the track rails, 3) each track rail, 4) connections from the track rails to the relay coil, and 5) the
track relay coil. In this series dc circuit, every element of the closed loop must function as
intended for current to flow through the track relay coil. If this track circuit is functioning as
designed, the track relay will be energized or “up” and the heel-front contacts of the relay will be
closed. The design of the track relay is a subcomponent of the track circuit and is subject to vital
design requirements as well. The electromechanical design of the relay is based upon the
requirement that if current is not flowing through the relay coil, the relay contacts will be
“down”, i.e. the heel-front relay contacts will be open. When a train occupies the track circuit,
the wheels and axles of the train provide alternate current paths of less resistance than the relay
coil. Most of the current available from the dc voltage source flows through the trains wheels
and axles leaving inadequate current to energize the track relay. The relay contacts are “down”
indicating that a train occupies the circuit. The Federal Railroad Administration requires that a
track circuit relay must be “in its most restrictive state,” i.e. in this example, “down,” when, “a
0.06 ohm resistive shunt is connected across the track rails of the circuit” (3). Notice that the
most restrictive state of the track relay is de-energized or “down” and that, by design, a properly
adjusted track circuit is down whenever it is occupied by a train or if any of the five elements of
the circuit fail to function as intended. Broken wires, broken rail (or rail bonding failures),
failure of voltage source, or relay coil faults will all result in a de-energized or “down” relay.

There are several variations of the dc track circuit, including type ac/dc, type ac feeding an ac
relay coil, coded dc or ac current sources and matching relays and numerous electronic and solid
state variations used throughout the world including audio frequency transmitter/receiver
combinations that eliminate the need to insulate rail joints to define circuit limits. In the 1950s
Stanford Research, at the request of Southern Pacific Company, developed a constant warning
device for at-grade crossing signal control. Constant warning devices and similar motion
sensitive devices transmit an audio frequency into a rail detection zone defined by shunts
connected between the track rails at the detection zone outer limits. The amplitude difference
and phase shift of audio frequency signals are detected by the device’s receiver to determine
status of the detection zone. The track zone presents a primarily inductive load to the transmitted
signal and is tuned upon installation of the device to a “normal” level that corresponds to an un-
occupied track. A failure of track connections or of the rail or of the termination will “detune”
the device. This deviation from normal will cause the device to revert to its most restrictive
state. When a train enters the “normalized” detection zone, the wheels and axles provide a
rolling or moving shunt to the audio frequency signal effectively changing the impedance of the
track detection zone. The amplitude and phase of the audio frequency as detected by the receiver
correlates with the dynamic impedance load resulting from a moving train within the track zone.
Amplitude and phase data is processed according to defined algorithms to determine if a detected
train is moving toward or away from the transmitter/receiver and speed of movement (including
detection of no movement or a standing train within the zone). Constant warning devices utilize
additional algorithms to determine speed, distance, and probable time of arrival of a train moving
toward a crossing. These state-of-the-art, very sophisticated devices are the preferred detection
system for modern grade crossing signal systems. Through several generations of devices,

railroad signal designers have resolved issues related to the use of microprocessor based systems
to provide vital railroad signal functions.
Today, all viable train detection devices and systems include a rail component necessary to vital
operation. All of the devices from dc track circuits to constant warning devices are vital. When
properly installed and adjusted, they detect trains occupying the detection zone and they revert to
most restrictive condition when the essential elements of the system are disarranged or fail.
They are excellent tools in the signal engineer’s kit but they are not perfect. Maintaining
electrical continuity of track rails, insulated rail joints, insulated track switch appliances and
device wiring connections to track rails requires continuous and constant effort. The devices are
designed to exacting standards, electronic devices are heavily redundant to increase reliability
and their cost reflects this. Most of the devices are not power efficient. System design changes
or upgrades frequently require field rewiring or full replacement. All of the devices are
susceptible to rail and ballast conditions including weather variations. Rusty or contaminated
rail may interfere with reliable or consistent detection of trains within the device’s detection
zone, the most egregious error possible for any train detection device. Contaminated track
ballast may provide sufficient alternative current paths between track rails to cause all of these
devices to revert to most restrictive condition until the contamination is resolved. None of these
devices function reliably if the track rails are under water. Northern latitude grade crossing
roadways are frequently treated with snow and ice melting agents during the winter months. It
is not unusual for de-icing contamination of the roadway or “island” train detection zone to
interfere and sometimes to prevent the proper operation of track based train detection devices.
There are a variety of innovative and novel technologies recently available that have been
suggested as additional productive tools for signal engineering vital train detection systems. The
final consideration is the cost of the vitally configured technology. The best new technology
choices will have excellent train detection characteristics, will be readily configurable as a vital
device or as an element of a vital system, will be fully compatible with current signal technology
and will cost less than technology currently in use. Various magnetometer configurations have
been explored by a number of companies searching for innovative train detection solutions.
None of those efforts have succeeded in discovering a vital design solution.
There are two types of low field magnetic sensors: 1) Coils and 2) Magneto-resistive bridges.
Coils, such as magneto-inductive and flux-gate sensors, require active oscillator circuits to detect
magnetic flux changes. Two types of magneto-resistive sensors are currently available: 1) Giant
Magneto-Resistive (GMR) and 2) Anisotropic Magneto-Resistive (AMR). GMR sensors require
a magnetic bias field to achieve the linearity necessary to train detection.
AMR sensors provide a directional one dimensional response to magnetic fields in their
magnetic sensitive axis and bridge voltage amplitude correlates linearly with field strength.
AMR elements may be combined and oriented to provide two dimensional and three dimensional
measurements. AMR devices manufactured by Honeywell, “have patented coils interleaved with
the bridge elements” (4) that can be used to offset element response to magnetic fields or to reset
magnetic domains of the sensor elements. These features are useful for eliminating temperature
drift and for compensating exposures to large magnetic fields generated by rail cars and
locomotives. AMR sensors have been evaluated for vehicle detection applications in general (4)
(5) and to train detection (4) (5) (6). Between 2002 and 2005, Central Signal deployed and
tested a magneto-inductive coil sensor, concluding that the electrical engineering necessary to
adapt this sensor type to the requirements of a vital train detection system were significant. It
was also apparent that coil type sensors lacked sufficient sensitivity to support the requirements
of a vital train detection device. Central Signal began a research and development effort in 2005
using the AMR sensor as the sensing element for train detection. Beginning in 2005, several
AMR sensor types and configurations have been deployed for extensive periods at a test site
provided by the Wisconsin & Southern Railroad at its Johnson St yard facility in Madison, WI.
2. MAGNETIC TRAIN DETECTION SYSTEM
AMR sensors have been demonstrated to reliably detect railroad trains, engines, and individual
cars at distances exceeding 60 feet. The fact that sensor output signals are affected by trains is
not, however, sufficient to vital detection. Track rail based detection schemes provide
continuous coverage of the detection zone and occupancy of the zone by a train is sampled
continuously from the time that the train enters the zone until the time that the train leaves the
zone. Discrete sensor schemes, whether they are wheel counters, vibration sensors, acoustic
detectors, photo detectors, or magnetometers cannot provide vital train detection by relying on
leading edge or leading/trailing edge detection unless the sensor distribution density
approximates continuous detection throughout the detection zone. This approximation is
invariably cost prohibitive and in actual practice may be extremely difficult to achieve.
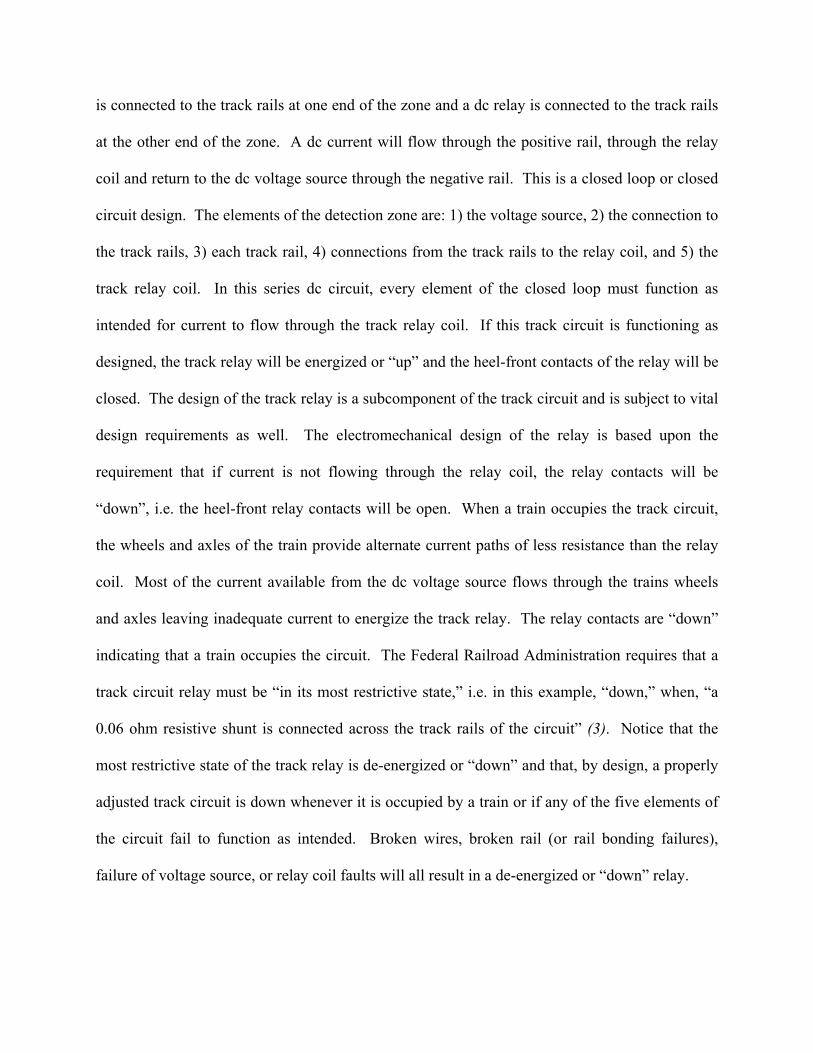
Figure 2. Magnetic train detection zone
Central Signal has invented a method to deploy AMR sensors to vitally detect trains occupying
the zone (Figure 2). The ARM sensors are one element of a sensor node configuration that
converts the analog waveform data produced by one or more AMR bridges to digital data that is
delivered to a microprocessor for analysis and evaluation. The microprocessor generates a
Unique Train Identification Signature (UTIS) that is time stamped and sent to an on-board spread
spectrum data radio that transmits the UTIS to a Vital Processing Unit (VPU). The VPU
controls other vital signal devices through its vital I/O. The VPU output is HI for unoccupied
track zones and all sensors reporting normal status within specified time frames. When a train
enters the range of a sensor, the magnitude of the AMR sensor response is evaluated. If the
required threshold is satisfied, the sensor node transmits a detection notice to the VPU which
then changes its output to LO. The sensor continues to evaluate the waveform generated by the
train event. If the train stops within range of the sensor node, that data is transmitted to the VPU.
The VPU evaluates data from this sensor node and compares data from all other sensor nodes to
determine actual train movement. If other sensor nodes report a stopped train, the VPU will
change output to HI after a delay based upon predicted location of leading edge of train at time
stop is confirmed by all sensor nodes within range of train. A continuous train movement
through the detection zone will generate at least one UTIS from two different sensor nodes as it
enters the detection zone and at least one UTIS from two different sensor nodes as it leaves the
detection zone. All UTIS must match for the VPU to conclude that the detection zone is
unoccupied and re-establish a HI output for that zone. Detection zones may be configured with
additional sensor nodes as may be determined by the signal engineer. For example, detection
zones that include track switches may be configured with sensors to detect train movements
diverging from the normal route (Figure 3).
Figure 3. Magnetic train detection zone with track switch
The sensor nodes are fully modular, power efficient devices that may be rapidly deployed to
define track detection zones. Radio range to the VPD is the primary determining power factor.
Extended range radios for the current version of the system may be powered by a photo voltaic
array and battery system. Sensor nodes near the radio location may be cable connected to the
radio and power system or they may communicate with the radio via short range data radios built
into the sensor node power unit. The power unit includes batteries, ultra capacitors, ceramic
piezo generators and sophisticated charge management devices. Sensor nodes may be installed
at any distance from the track up to 20 feet from nearest rail. Extensive testing performed with
sensor nodes 15 feet from nearest rail and 2 feet below existing grade has produced consistent
and reliable detections of all trains. The sensor nodes may be mounted on tie faces or may be
buried within the area of the track zone at a depth of two feet. Proper orientation of the sensor is
critical to its proper operation but small angular variations from the proper direction are
inconsequential to reliable operation.
The VPU design satisfies all vital design requirements for processor-based signal and train
control devices. Its power efficient design with radio option enables it to be powered by a photo-
voltaic/battery power system. The VPU is deployable to any remote location. VPUs may be
configured to communicate via spread spectrum data radio with adjacent VPUs, enabling
extensive systems to be rapidly deployed.
Figure 4 shows three dimensional waveforms generated by AMR sensors housed in one sensor
node. The sensors are oriented in three dimensions within the sensor node. Axis X corresponds
to a vector perpendicular to the track rails. Axis Y corresponds to a vector that is parallel to the
track rails. Axis Z corresponds to a vector that is perpendicular to the ground plane in the area of
the sensor. Each graph of the three waveforms plots magnetic flux variation in milli-Gauss along
the vertical axis and elapsed time in seconds along the horizontal axis. Notice that the un-
occupied reference level for X axis waveform data is -0.35 mGauss between zero and about 12
seconds and between about 178 and 188 seconds. This is the base reference for the X axis sensor
of this sensor node. The base reference value for the same time frames on the Y axis waveform
is 0.45 mGauss and for the Z axis waveform it is -0.95 mGauss. These waveforms were
generated by a locomotive pushing a train within range of and past the sensor node. The square
wave immediately above the waveform shows the output of the sensor node detection algorithm.
Upward deflection of the square wave corresponds to the algorithm declaring the presence of a
train. The train event lasted from 13 to 178 seconds or 165 seconds total. The waveform
equations for each axis are given by:

0 20 40 60 80 100 120 140 160 180 200-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Seconds
mG
auss
X-axis waveform data
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Seconds
mG
auss
Y-axis waveform data
0 20 40 60 80 100 120 140 160 180 200-1
-0.95
-0.9
-0.85
-0.8
-0.75
Seconds
mG
auss
Z-axis waveform data
Figure 4. Three dimensional AMR sensor waveform data of a train and detection results
Each of the waveforms show clear and distinct magnetic flux changes during the time the train is
within range of the sensor node. The characteristic magnetic signature of each train car is
dependent on its ferrous content. Locomotives are equipped with traction motors, so operating
locomotives typically generate a unique and easily distinguishable waveform. The locomotive
can be identified by the sharply increased waveform amplitude between 138 and 175 seconds.
The waveform signature of a complete train depends on the sequence of train cars connected
together to form a train. Same number of train cars arranged in a different sequence will generate
a different waveform. Each sensor node will generate similar waveform data as the train moves
into range and then past each sensor node. Each sensor node will evaluate the waveform data
with a detection algorithm. The detection algorithm computes the standard deviation of the
waveform during a fixed time interval and compares it to a predefined threshold. It also
calculates the energy of the waveform and compares that to another predefined threshold. If
either of these calculations exceeds the thresholds during three consecutive detection time
periods, the sensor node has identified a train detection event. If the calculations do not exceed
the thresholds for five consecutive detection time periods, the sensor node has identified a train
exit event. The detection algorithm may be computed for waveform data generated by one or
more AMR sensor axes. Comparing waveform data generated by X, Y and Z axes shown in
Figure 4, confirms that each axis generates a different waveform
3. FEATURE EXTRACTION AND MATCHING
0 10 20 30 40 50 60 70 80 90 100-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Seconds
mG
auss
Z-axis waveform data
F
igure 5. A train reversal move with train detection and detected peaks shown on the waveform data
The sensor node task of train identification may use a feature extraction method that extracts the
salient features from the unique waveform signature generated by AMR sensors when trains are
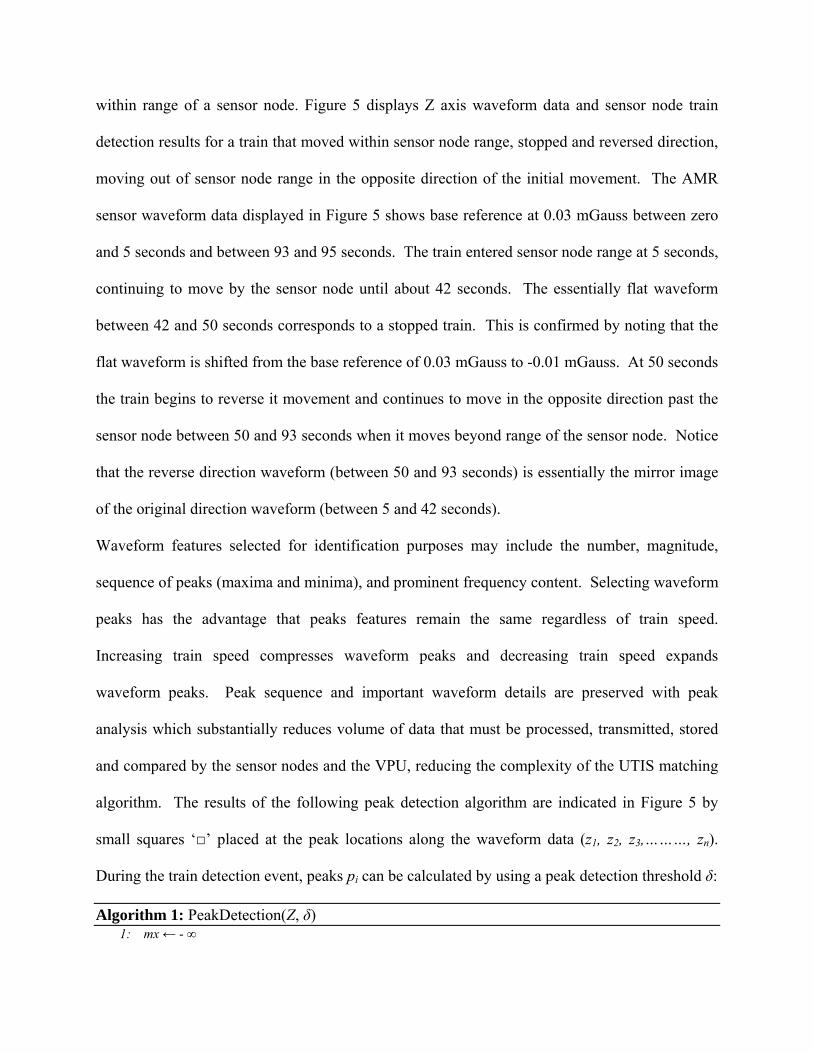
within range of a sensor node. Figure 5 displays Z axis waveform data and sensor node train
detection results for a train that moved within sensor node range, stopped and reversed direction,
moving out of sensor node range in the opposite direction of the initial movement. The AMR
sensor waveform data displayed in Figure 5 shows base reference at 0.03 mGauss between zero
and 5 seconds and between 93 and 95 seconds. The train entered sensor node range at 5 seconds,
continuing to move by the sensor node until about 42 seconds. The essentially flat waveform
between 42 and 50 seconds corresponds to a stopped train. This is confirmed by noting that the
flat waveform is shifted from the base reference of 0.03 mGauss to -0.01 mGauss. At 50 seconds
the train begins to reverse it movement and continues to move in the opposite direction past the
sensor node between 50 and 93 seconds when it moves beyond range of the sensor node. Notice
that the reverse direction waveform (between 50 and 93 seconds) is essentially the mirror image
of the original direction waveform (between 5 and 42 seconds).
Waveform features selected for identification purposes may include the number, magnitude,
sequence of peaks (maxima and minima), and prominent frequency content. Selecting waveform
peaks has the advantage that peaks features remain the same regardless of train speed.
Increasing train speed compresses waveform peaks and decreasing train speed expands
waveform peaks. Peak sequence and important waveform details are preserved with peak
analysis which substantially reduces volume of data that must be processed, transmitted, stored
and compared by the sensor nodes and the VPU, reducing the complexity of the UTIS matching
algorithm. The results of the following peak detection algorithm are indicated in Figure 5 by
small squares ‘□’ placed at the peak locations along the waveform data (z1, z2, z3,………, zn).
During the train detection event, peaks pi can be calculated by using a peak detection threshold δ:
Algorithm 1: PeakDetection(Z, δ) 1: mx ← - ∞

2: mn ← +∞
3: p[] ← new
4: searchmaxima ← 0
5: for i = 1; i≤ n; i++ do
6: if zi > mx + δ, then
7: mx ← zi
8: end if
9: if zi < mx - δ, then
10: mx ← zi
11: end if
12: if searchmaxima == 1 then
13: if zi < mx - δ, then
14: pi ← zi
15: mn ← zi
16: serachmaxima ← 0
17: end if
18: else
19: if zi > mn + δ, then
20: pi = ← zi,
21: mx = ← zi
22: serachmaxima ← 1
23: end if
24: end if
25: end for
26: return p The series of detected peaks for a given train detection event are given by:

The sequence and time stamped peak values derived from the AMR sensor generated waveform
of a train moving within the train detection zone are calculated and temporarily stored by each
sensor node. Time stamped sequence and peak value data is transmitted by all train detection
zone sensor nodes to the VPU where data from each sensor node is evaluated and compared to
determine if sensor node data matches.
There may be great variability in train movements that occupy the train detection zone. A train
may enter the zone at a certain speed and continue through the entire zone, exiting at the same
speed. A train may enter the zone and increase or decrease speed while transiting the zone. A
train may enter the zone and stop within the zone, eventually resuming the original direction of
movement or reversing its movement within the zone. A train may enter the zone and, with or
without stopping and reverse movements, diverge from the main route, picking up and/or leaving
rail cars and changing the order of cars within the composition of the train, finally resuming or
reversing the original movement into the detection zone. Additional processing is required at the
sensor node to track variations in train movement and composition. In order to provide feature
extraction for a train event without peaks redundancy due to train reversals, it is essential to
detect when a train stops based on the waveform data processing. The following train stop
detection algorithm looks for continuous waveform variation and compares consecutive changes
in waveform to a threshold while also comparing the largest difference in variation to another
predefined threshold. If is the mean value of the waveform data taken over n samples
and is its derivative then following criteria is used to declare vehicle’s motion state by
comparing to thresholds and over M number of derivatives. The thresholds and are
decided empirically from actual train waveform data.

Once the vehicle’s state of motion is identified, further processing will remove peak redundancy.
Figure 5 shows the z-axis waveform data and train detection results of a train that moved within
range of a sensor node, stopped and then reversed out. The train stop detection algorithm will
indicate the stopped train of Figure 5. This indication helps in sub-grouping the peaks that exist
between train stop events or between train stop events and end of detection events. Generally,
the sequence of peaks selected for a train detection event can be represented by:
Where m is the number of stops made by the train in a particular train detection event and ni is
the number of peaks detected in the interval before an ith stop. These sub-groups can be matched
against each other for possible train reversal detection. It is critical to identify train reversal, in
order to remove redundancy in the waveform peaks. Therefore a logic is required that checks for
reverse train movements and tracks direction of movement changes during the train detection
event.
Each subgroup of peaks is matched with its following neighboring subgroup to check for reversal
detection using a Dynamic Time Warping (DTW) method (7). Given two subgroup of peaks,
such that n1=M and n2=N, DTW gives the optimal
solution in the O(MN) time which may be refined further through different techniques such as
multi-scaling (8) (9). If these peaks or sequences are taken from some feature space then for
comparison purposes a local distance measure between can be given by:

d is small for similar peaks and large for dissimilar peaks. The Dynamic Programming algorithm
lies at the core of DTW, therefore the distance function (d) is called a cost function and the
evaluation becomes a cost minimization task. The main algorithm creates a distance matrix
representing all pair wise distances between P1 and P2. is the local cost matrix for
the alignment of two sequences P1 and P2 :
The next task after populating the local cost matrix is to find the alignment path that follows the
low cost area of the cost matrix. The alignment path built by DTW is a sequence of points
with satisfying following criteria:
1) Boundary condition such that the starting and ending points of the warping path must be first
and last points of aligned sequence i.e. . 2) Monotonicity condition
for preserving time sequence of points/peaks. 3) Step size condition for limiting the warping
path from long jumps while aligning sequences, normally using a basic step size such as
. The cost function will then be:
The path that has a minimal associated cost is the optimal warping path (called W*). In order to
find this optimal path every possible warping path between P1 and P2 has to be explored which
could be computationally expensive. A Dynamic Programming based method which reduces the
complexity down to O(MN) can be employed which uses the DTW distance function
where is set of all possible warping paths. The global cost matrix D may now be created
such that:
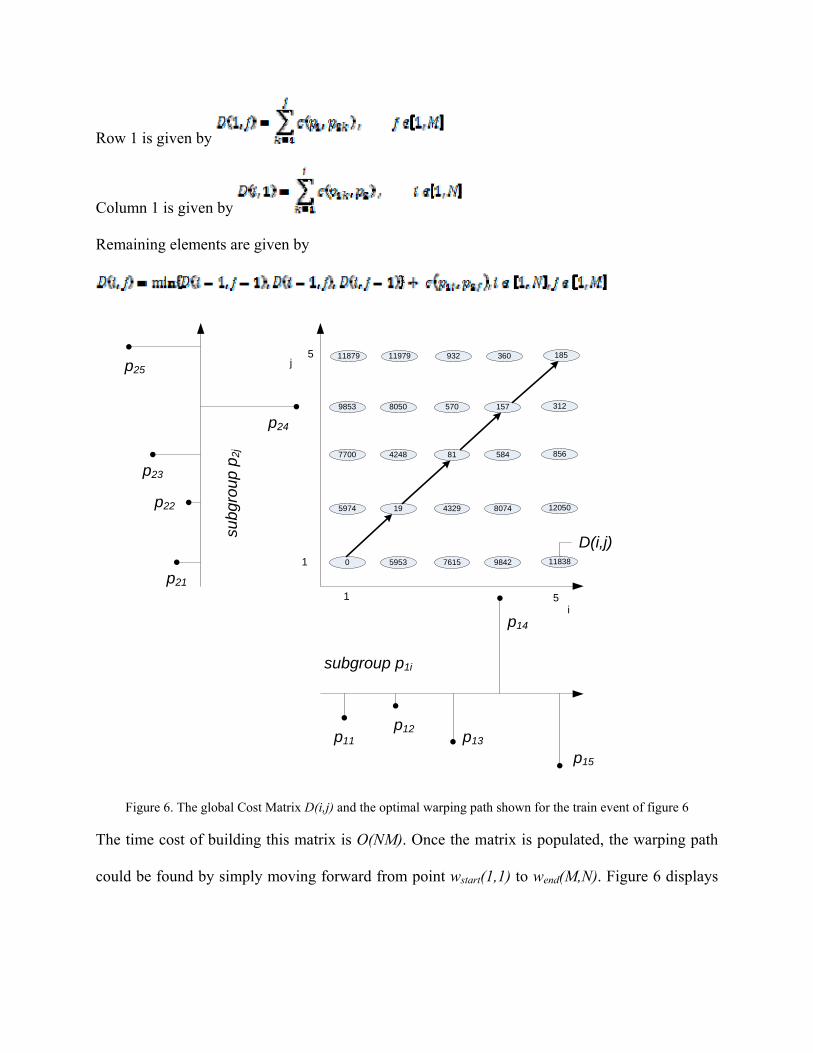
Row 1 is given by
Column 1 is given by
Remaining elements are given by
i
j
1
1
5
5
0 5953 7615 9842 11838
5974 19 4329 8074 12050
7700 4248 81 584 856
9853 8050 570 157 312
11879 11979 932 360 185
p11p12
p13
p14
p15
p21
p22
p23
p24
p25
subgroup p1i
subg
roup
p2
j
D(i,j)
Figure 6. The global Cost Matrix D(i,j) and the optimal warping path shown for the train event of figure 6
The time cost of building this matrix is O(NM). Once the matrix is populated, the warping path
could be found by simply moving forward from point wstart(1,1) to wend(M,N). Figure 6 displays
the Cost Matrix D(i,j) calculated for the waveform data and peaks shown in Figure 5. The
optimal warping path, lowest cost associated, is shown by solid arrows.
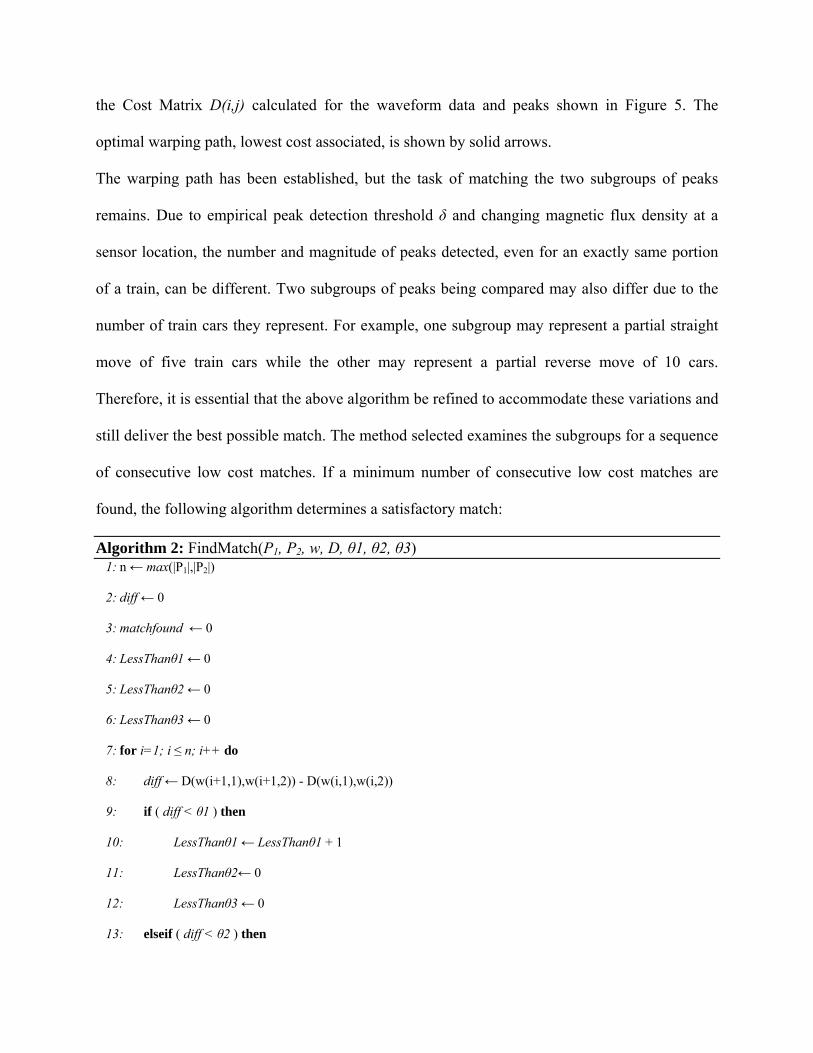
The warping path has been established, but the task of matching the two subgroups of peaks
remains. Due to empirical peak detection threshold δ and changing magnetic flux density at a
sensor location, the number and magnitude of peaks detected, even for an exactly same portion
of a train, can be different. Two subgroups of peaks being compared may also differ due to the
number of train cars they represent. For example, one subgroup may represent a partial straight
move of five train cars while the other may represent a partial reverse move of 10 cars.
Therefore, it is essential that the above algorithm be refined to accommodate these variations and
still deliver the best possible match. The method selected examines the subgroups for a sequence
of consecutive low cost matches. If a minimum number of consecutive low cost matches are
found, the following algorithm determines a satisfactory match:
Algorithm 2: FindMatch(P1, P2, w, D, θ1, θ2, θ3) 1: n ← max(|P1|,|P2|)
2: diff ← 0
3: matchfound ← 0
4: LessThanθ1 ← 0
5: LessThanθ2 ← 0
6: LessThanθ3 ← 0
7: for i=1; i ≤ n; i++ do
8: diff ← D(w(i+1,1),w(i+1,2)) - D(w(i,1),w(i,2))
9: if ( diff < θ1 ) then
10: LessThanθ1 ← LessThanθ1 + 1
11: LessThanθ2← 0
12: LessThanθ3 ← 0
13: elseif ( diff < θ2 ) then
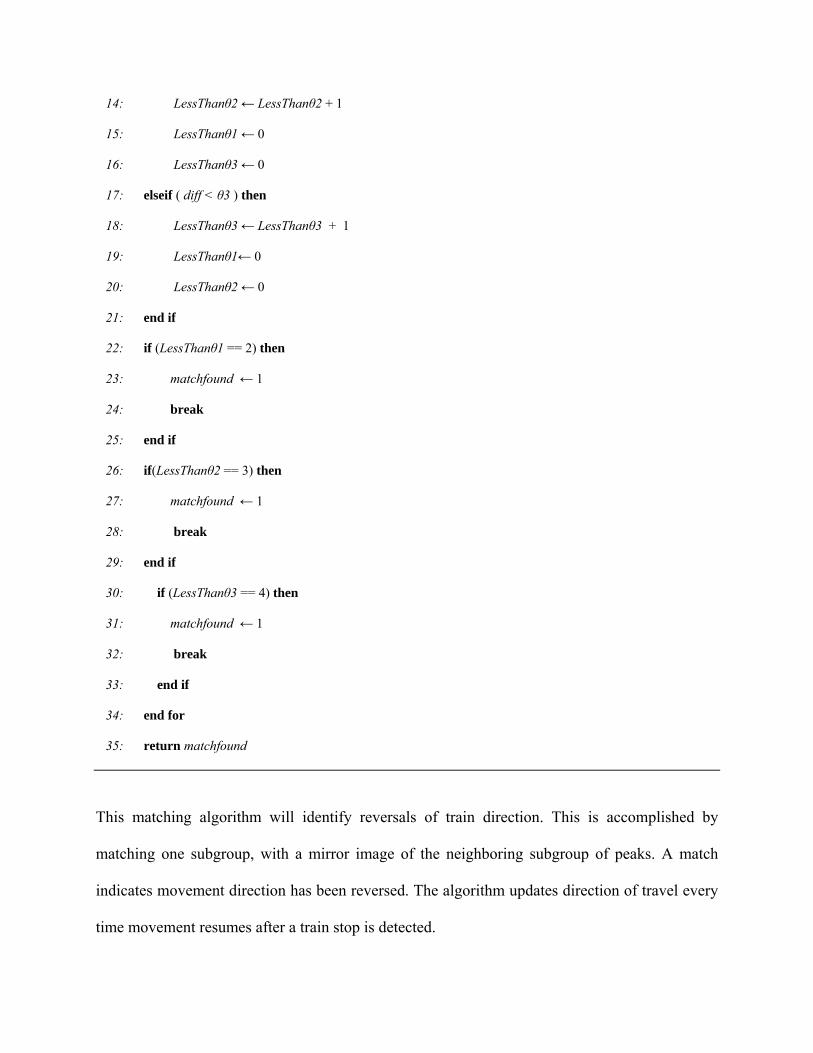
14: LessThanθ2 ← LessThanθ2 + 1
15: LessThanθ1 ← 0
16: LessThanθ3 ← 0
17: elseif ( diff < θ3 ) then
18: LessThanθ3 ← LessThanθ3 + 1
19: LessThanθ1← 0
20: LessThanθ2 ← 0
21: end if
22: if (LessThanθ1 == 2) then
23: matchfound ← 1
24: break
25: end if
26: if(LessThanθ2 == 3) then
27: matchfound ← 1
28: break
29: end if
30: if (LessThanθ3 == 4) then
31: matchfound ← 1
32: break
33: end if
34: end for
35: return matchfound
This matching algorithm will identify reversals of train direction. This is accomplished by
matching one subgroup, with a mirror image of the neighboring subgroup of peaks. A match
indicates movement direction has been reversed. The algorithm updates direction of travel every
time movement resumes after a train stop is detected.

Each sensor node transmits a train detection report to the VPU when the train detection event is
complete at that sensor node. This report includes essential features of the AMR waveform
derived by sensor node processing techniques such as peak detection. These techniques remove
redundancies via the sensor node matching algorithm before the train detection report is
transmitted to the VPU. This technique simplifies matching multiple sensor node UTIS
matching at the VPU using the DTW method. These techniques have the flexibility to provide
reliable UTIS matching in spite of variable magnetic fields, train movements and fixed threshold
criteria. If the VPD determines that the UTIS received from all sensor nodes in a train detection
zone match, and all sensor nodes report normal operational status, the VPD output will be
changed from LO to HI, indicating an un-occupied train detection zone.
Data derived from the AMR sensor response to magnetic flux changes caused by locomotives
and rail cars is critical to the vital, fail-safe, closed loop performance of a magnetometer-based
train detection zone. Methods for digitally evaluating and processing the analog data generated
by the AMR sensors are critical to the vitality of the detection zone.
4. CONCLUSION
A vital train detection system utilizing track rail independent magnetometers to establish discrete
train detection zones is feasible. Success requires the use of AMR sensors and dynamic
waveform processing techniques that enable reliable and conclusive matching of unique train
identification signatures derived by multiple sensor nodes reporting to a central vital processing
unit. AMR sensor generated waveform characteristics, appropriate waveform processing, and
robust central processor matching methods are necessary to the vitality and reliability of this
train detection system. This innovative magnetic detection system is compatible with
conventional railroad signal devices and systems. It satisfies vital, fail-safe and closed loop
design principles. It may be deployed as an enhancement of conventional devices or configured
as a stand alone system. It is immune to the effects of rail and ballast contamination, including
salt or other snow-melting/de-icing agents. The sensor nodes and vital processor unit are power
efficient and fully modular. Low power requirements enable the sensor nodes and the vital
processor unit to operate off grid. The system is designed for rapid deployment and remains
easily reconfigurable. Adding or removing sensor nodes from a train detection zone requires
only user programming changes at the central vital processing unit. Possible applications include
stand alone rural crossing train detection systems, auxiliary train detection device for grade
crossing systems installed on poor track or contaminated ballast, auxiliary control system for
railroad crossing highway traffic preemption, and switch protection in classification yards. The
system may be configured to emulate the performance of any track based train detection circuit
from dc track circuit to constant warning devices.
5. ACKNOWLEDGMENTS
The research described herein has been partially funded by USDA SBIR research grants 2007-
33610-18611 and 2006-33610-16783. Railroad test site facilities are provided by Wisconsin &
Southern Railroad, Madison, Wisconsin.
6. REFERENCES [1] 49CFR Part 236.5 Design of Control Circuits on Closed Circuit Principle. Rules,
Standards and Instructions Governing the Installation, Inspection, Maintenance and Repair
of Systems, Devices, and Appliances
[2] Robinson, William, US Patent 130,661, Improvement in Electric-Signaling Apparatus for
Railroads, August 20, 1872.
[3] 49CFR Part 236.56 Shunting Sensitivity. Rules, Standards and Instructions Governing the

Installation, Inspection, Maintenance and Repair of Systems, Devices, and Appliances
[4] Honeywell, Application Note – AN218, Vehicle Detection Using AMR Sensors, August
2005.
[5] Transportation Research Board of the National Academies, High-Speed Rail IDEA Program
Final Report for Project 53, Magnetometer Sensor Feasibility for Railroad and Highway
Equipment Detection, Prepared by Jeff Brawner and K. Tysen Mueller, SENSIS
Corporation, Seagull Technology Center, June 2006.
[6] Eva Signal Corporation, US Patent 7,075427 B1, Traffic Warning System, Joseph R. Pace
and Joseph A. Pace, July 11, 2006.
[7] R. Bellman and R. Kalaba (1959), On adaptive control processes, Automatic Control, IRE
Trans, Vol. 4, No. 2, pp 1-9.
[8] M. Muller, H. Mattes, and F. Kurth (2006), An efficient multiscale approach to audio
synchronization, pp. 192-197.
[9] S. Salvador and P. Chan (2007), Towards accurate dynamic time warping in linear time and
space, Intell. Data Anal., Vol. 11, No. 5, pp. 561-580.
7. LIST OF FIGURES AND ALGORITHMS Figure 1. DC Track Circuit Diagram
Figure 2. Magnetic Train Detection Zone Diagram
Figure 3. Magnetic Train Detection Zone with Track Switch Diagram
Figure 4. Three dimensional AMR sensor waveform data of a train and detection results
Figure 5. A train reversal move with train detection and detected peaks shown on the
waveform data

Figure 6. The global Cost Matrix D(i,j) and the optimal warping path shown for the train
event of Figure 6
Algorithm 1: PeakDetection(Z, δ) Algorithm 2: FindMatch(P1, P2, w, D, θ1, θ2, θ3)