an rfid-based object localization framework and system kirti chawla department of computer science...
TRANSCRIPT

An RFID-Based Object Localization Framework and System
Kirti ChawlaDepartment of Computer Science
University of Virginia

1/33
Goal: Locate objects in an environmentAttributes: -Reliable-Accurate (sub-meter) and Fast (seconds)
Location, Location, LocationIntroduction
Locate
Objects Environments

2/33
RFID Tag
Near-field CommunicationFar-field Communication
Tags and Readers: - Form Factors - Operating Frequency- Power Source
RFID PrimerBackground
RFID Reader

IntellectualContributions
Resilient to environmental conditions / noise
Accommodates numerous scenarios
Tag orientation and vendor hardware –agnostic
Adaptability
Signal strength as a reliable metric
Tag sensitivity influences performance
Tag selection & sorting ensures uniformity
Heuristics enhance accuracy
Reliability
Tag selection optimizes range & cost
Improved performance by matching tags to readers
Reference tags are unnecessary
Scalability
3/33
4/33
Technologies
Mismatched Solutions
Limiting Constraints
Techniques
Current State of the ArtBackground

5/33
Pros/ConsMotivation
Dark Environmen
t
No Line of Sight
Cost Effective
Solid Obstacles
Adaptive
Susceptible
Invasive
Entry Barrier
Targeted
Unintended Use

Use-Case: WarehouseMotivation
Warehouse-Store30 Min./Day
Avg. Search Time
100, 000 Ft2
4000 Stores
Floor space and Nos.
100 People$ 12/Hour275 Days/Year
Workforce Cost
Potential New Savings = $ 600 Million / Year
6/33

Other Use-CasesMotivation
Hospitals
Airports
Locate:- Guests / Travelers- Freight- Baggage
Locate:- Medical Supplies- Surgical Instruments- Caregivers- Patients
7/33

Thesis StatementResearch
8/33
Reliable High-Performance
RFID-based Object Localization
Framework and System
Performance Enhancing Heuristics
Empirical Power-Distance
Relationships
Uniformly Sensitive Tags
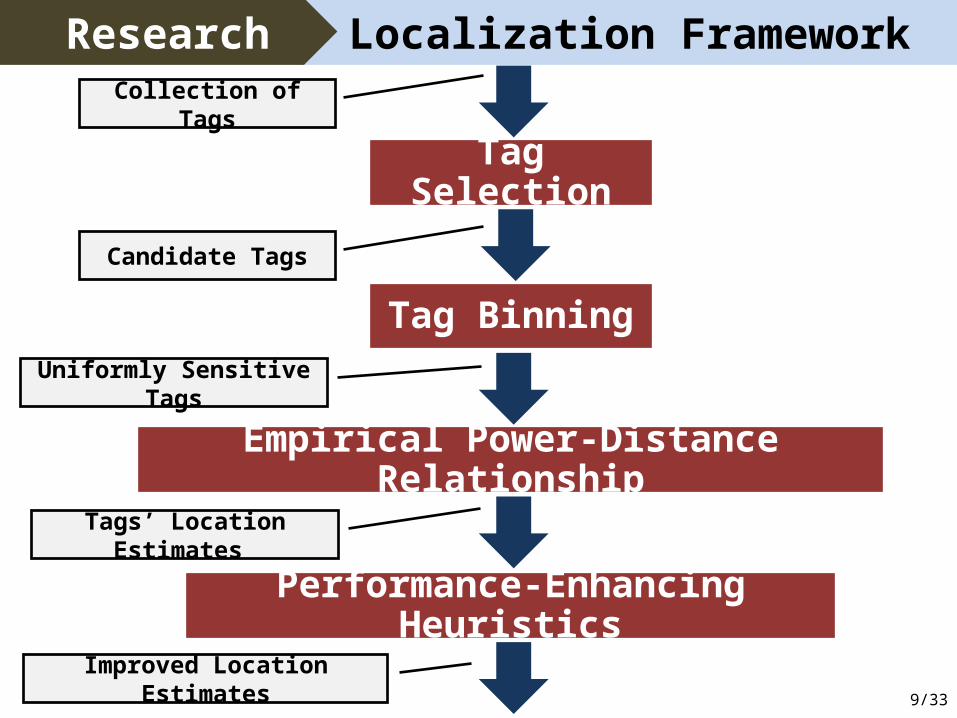
Localization FrameworkResearch
Tag Selection
Tag Binning
Empirical Power-Distance Relationship
Performance-Enhancing Heuristics
Collection of Tags
Improved Location Estimates
Candidate Tags
Uniformly Sensitive Tags
Tags’ Location Estimates
9/33
10/33
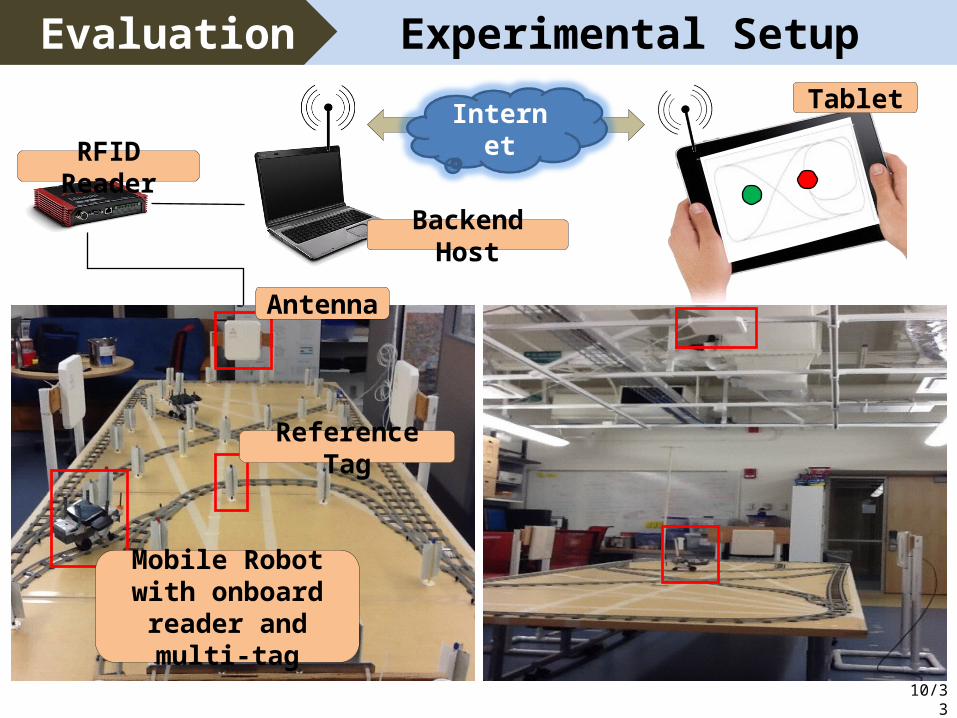
Experimental SetupEvaluation
Reference Tag
Antenna
Mobile Robot with onboard reader
and multi-tag
RFID Reader
Backend Host
TabletInternet
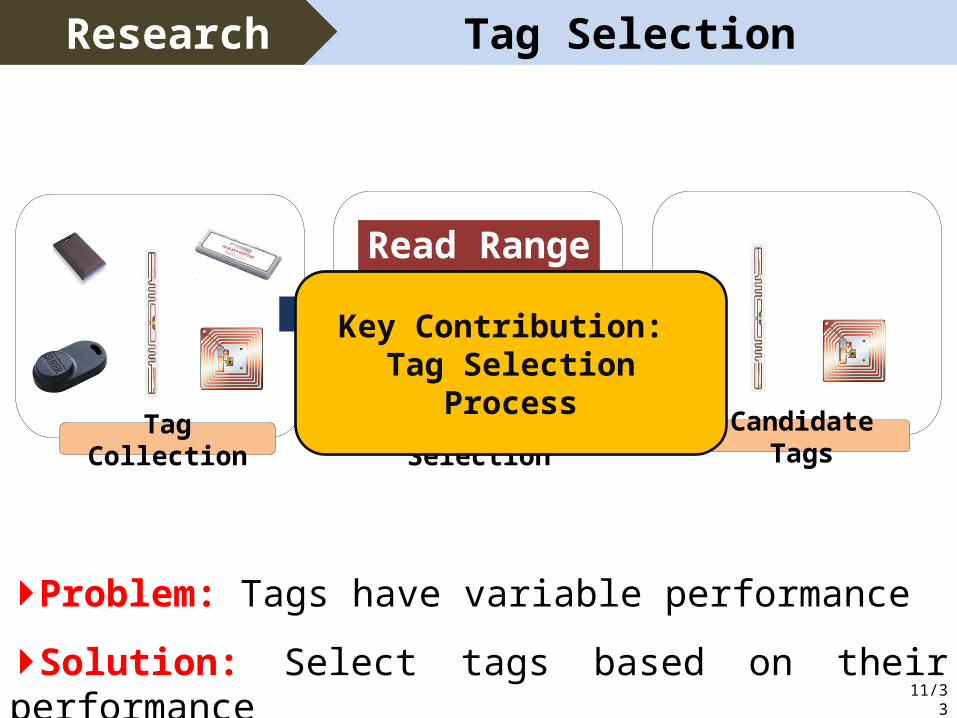
Tag SelectionResearch
Problem: Tags have variable performance
Solution: Select tags based on their performance
Read Range
RSS
Read Count
Tag Selection
11/33
Tag Collection Candidate Tags
Key Contribution: Tag Selection Process

12/33
Tag SelectionEvaluation
Insight: Select tags on multi-objective criteria
13/33
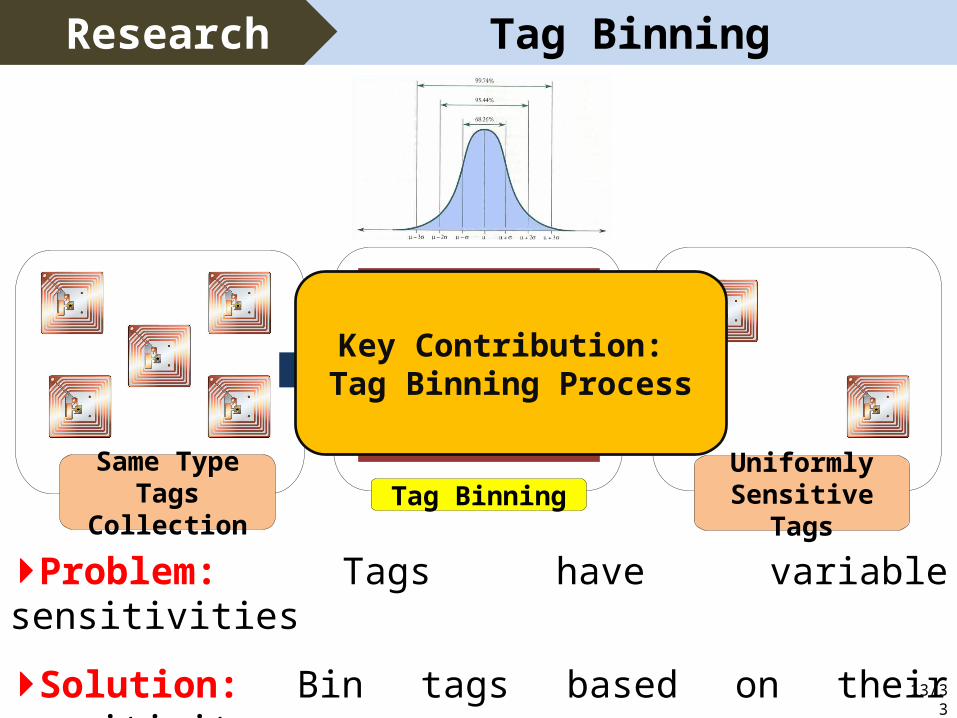
Tag BinningResearch
Problem: Tags have variable sensitivities
Solution: Bin tags based on their sensitivity
RSS
Read Count
Tag BinningSame Type
Tags CollectionUniformly
Sensitive Tags
Key Contribution: Tag Binning Process
14/33
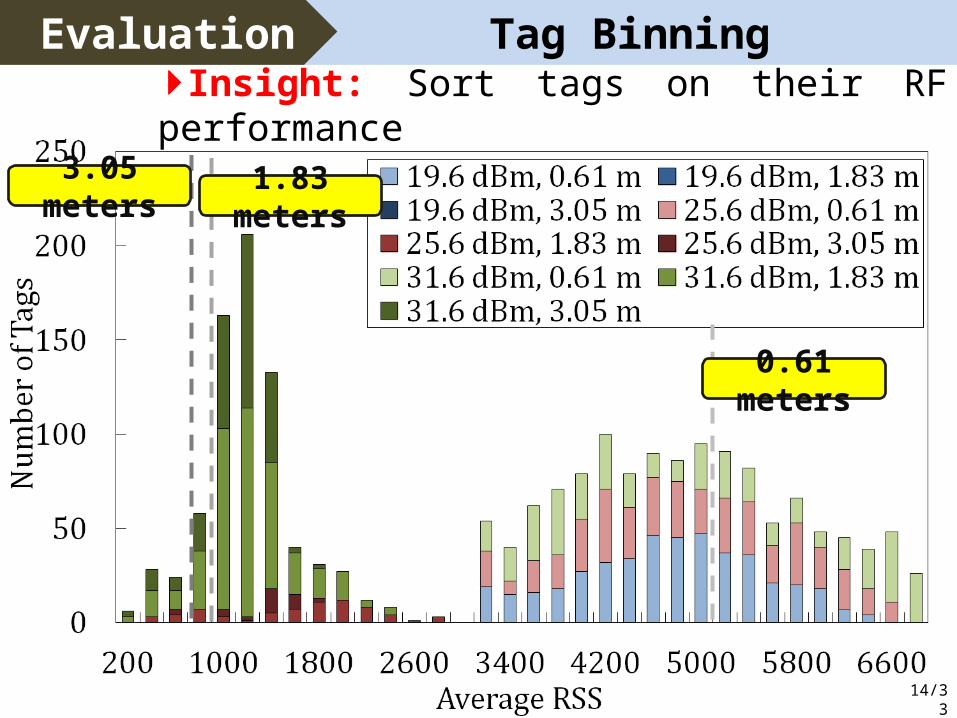
Tag BinningEvaluation
Insight: Sort tags on their RF performance
0.61 meters
1.83 meters3.05 meters

15/33
Tag BinningEvaluation
0.61 meters1.83 meters
3.05 meters
Yield: ~70 % (350 out of 500)Tags are uniformly sensitive
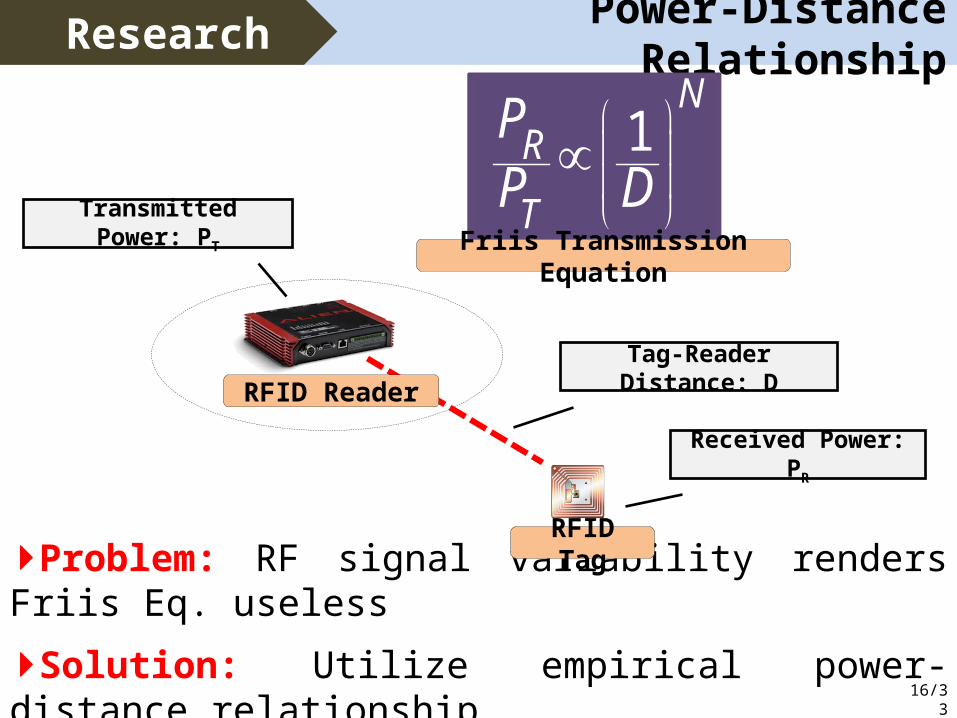
Power-Distance RelationshipResearch
Problem: RF signal variability renders Friis Eq. useless
Solution: Utilize empirical power-distance relationship
RFID Tag
Transmitted Power: PT
Received Power: PR
RFID ReaderTag-Reader Distance: D
1
N
R
T
PP D
Friis Transmission Equation
16/33
17/33
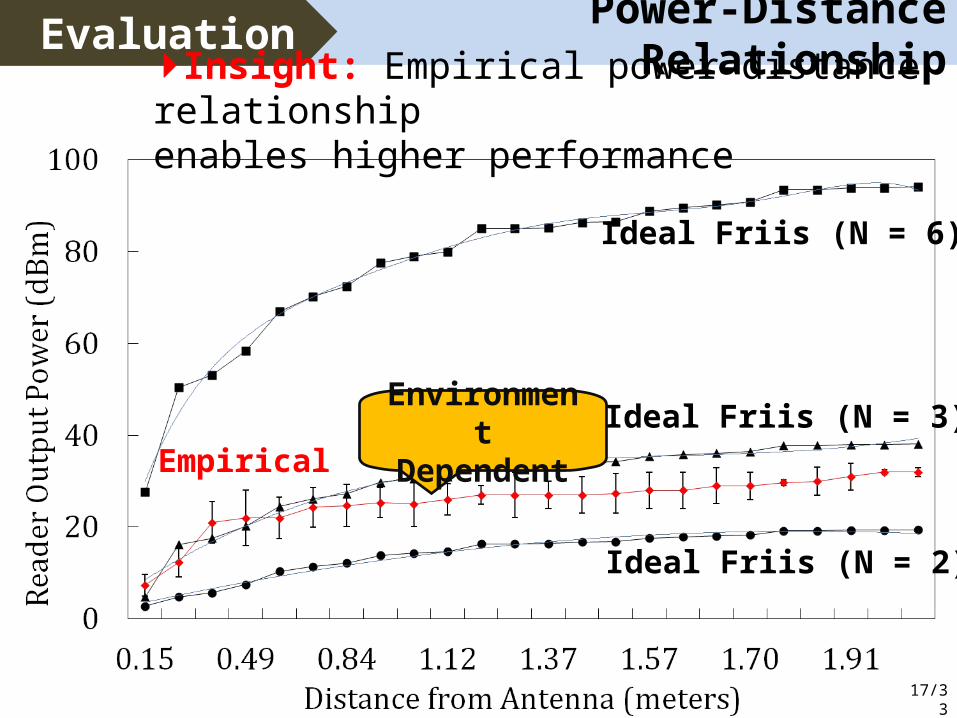
Power-Distance RelationshipEvaluationInsight: Empirical power-distance relationship
enables higher performance
Ideal Friis (N = 2)
Ideal Friis (N = 3)
Ideal Friis (N = 6)
Empirical
Environment Dependent

18/33
Power-Distance RelationshipResearch
Problem: Locate objects using empirical power-distance relationship
Solution: Utilize TX and RX empirical power-distance relationship
Read Count
Empirical Power-Distance
Relationship
TX-Side Algorithms
RX-Side Models
Tags’ Location Estimates
Uniformly Sensitive Tags

19/33
TX-Side AlgorithmsResearch
Insight: Similarly behaving tags are neighbors
Radio Wave
Shared Region
Locate Tags: Power-Modulating Algorithms
Antenna
20/33
TX-Side AlgorithmsResearch
Locate Tags: Power-Modulating Algorithms
Problem: Locate tags using TX RF signal power
Solution: Algorithmically modulate TX RF signal power
Algorithms
Key Contributions: TX-Side Power-Modulating Algorithms
21/33
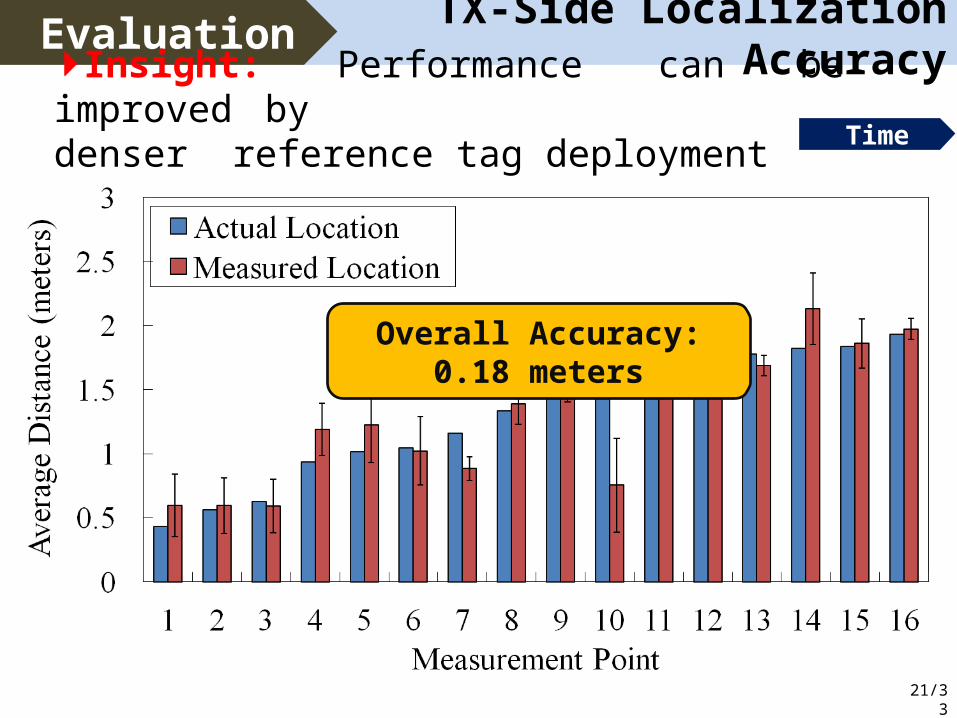
TX-Side Localization AccuracyEvaluationInsight: Performance can be improved by
denser reference tag deployment
Time
Overall Accuracy: 0.18 meters
22/33
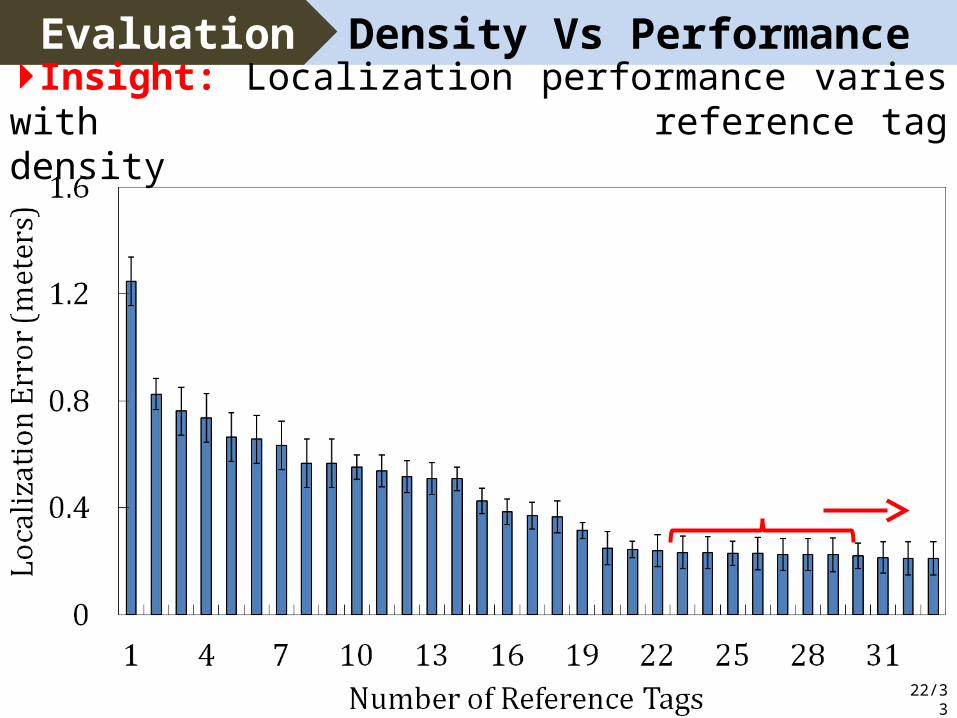
Density Vs PerformanceEvaluation
Insight: Localization performance varies with reference tag density

23/33
RX-Side ModelsResearch
Insight: Match tags to readers for higher performance
RFID Tag - A
RFID Reader - A
RFID Reader - B
RFID Tag - B
Key Contributions: Tag-Reader Matched Pairs
Axial Orientation
24/33
RX-Side ModelsResearch
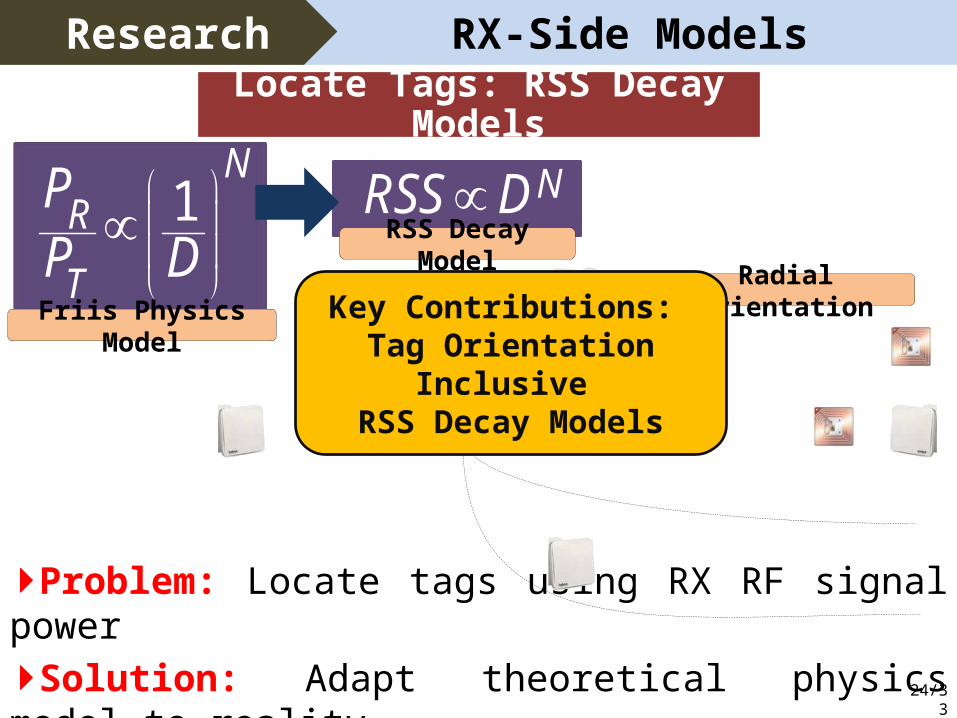
Locate Tags: RSS Decay Models
Problem: Locate tags using RX RF signal powerSolution: Adapt theoretical physics model to reality
Radial Orientation
NRSS DRSS Decay Model
1
N
R
T
PP D
Friis Physics Model Key Contributions: Tag Orientation Inclusive
RSS Decay Models

25/33
RSS Decay ModelsEvaluationInsight: Orientation-based decay models lead
to orientation-agnostic localization Radial
26/33
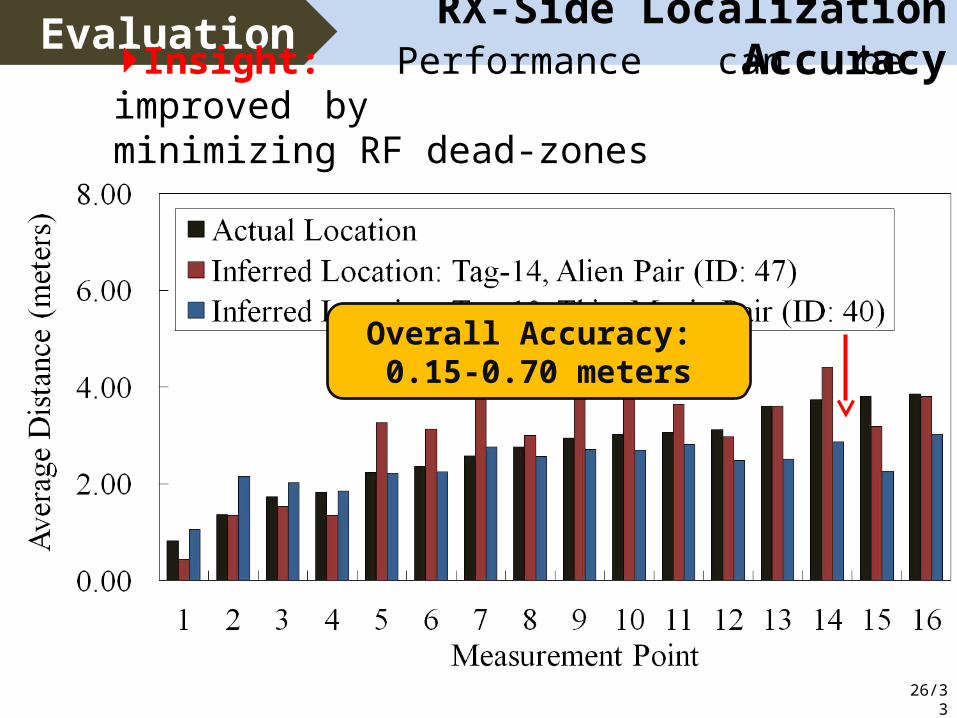
RX-Side Localization AccuracyEvaluationInsight: Performance can be improved by
minimizing RF dead-zones
Overall Accuracy: 0.15-0.70 meters

Scalability: No. of ObjectsEvaluation
Insight: No. of objects -invariant localization accuracy feasible
27/33

28/33
HeuristicsResearch
Problem: Assumption that target and reference tag location coincide leads to localization
error
Solution: Consider neighbor reference tags that minimize localization error
Localization Error
Reference Tag
Target Tag
Heuristics
Key Contributions: Heuristics for Improving
Localization Accuracy

29/33
Experimental SetupEvaluation
RFID Reader
Backend Host
TabletInternet
Target Tag
Antenna
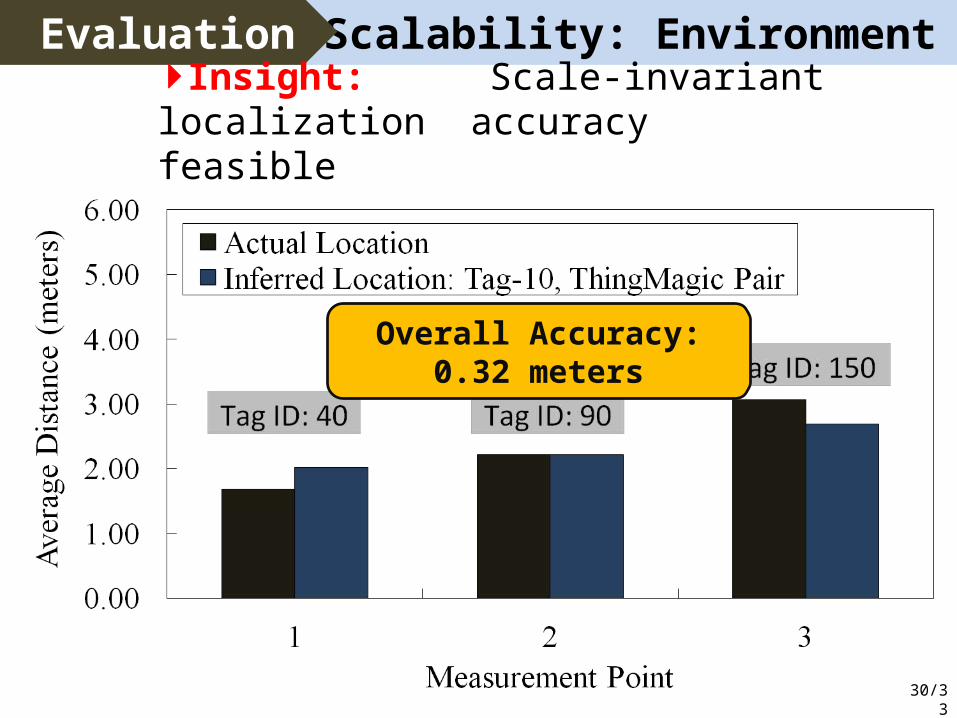
Scalability: EnvironmentEvaluation
Insight: Scale-invariant localization accuracyfeasible
30/33
Overall Accuracy: 0.32 meters
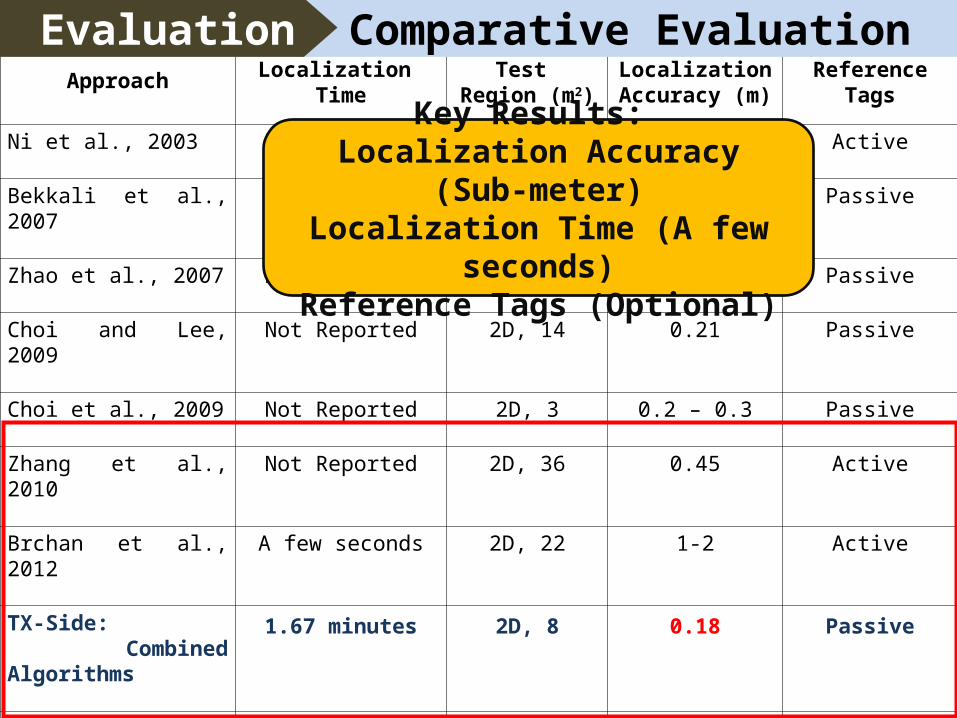
Approach Localization Time
Test Region (m2)
Localization Accuracy (m)
Reference Tags
Ni et al., 2003 Not Reported 2D, 20 2 Active
Bekkali et al., 2007 Not Reported 2D, 9 0.5 – 1.0 Passive
Zhao et al., 2007 Not Reported 2D, 20 0.14 – 0.29 Passive
Choi and Lee, 2009 Not Reported 2D, 14 0.21 Passive
Choi et al., 2009 Not Reported 2D, 3 0.2 – 0.3 Passive
Zhang et al., 2010 Not Reported 2D, 36 0.45 Active
Brchan et al., 2012 A few seconds 2D, 22 1-2 Active
TX-Side: Combined Algorithms
1.67 minutes 2D, 8 0.18 Passive
RX-Side: Combined Models (without ref. tags)
~4 seconds2D, 8
0.22- 0.70 Not Applicable
RX-Side: Combined Models (with ref. tags)
Variable 2D, 80.15- 0.41 Passive
Comparative EvaluationEvaluation
Key Results: Localization Accuracy (Sub-meter)Localization Time (A few seconds)
Reference Tags (Optional)

29/30
Summary and Future WorkConclusion
RFID-Based Location System:- Pure RFID reliably locates objects- Match tags to readers- Tag selection & binning improves tag performance- TX/RX empirical power-distance relationship- Algorithms, models, and heuristics for object localization- Identify / mitigate key localization challenges
Future Research Directions:- 3D Visualization tools- Field testing and commercialization

• Co-directed 10 undergraduate theses and Capstone projects• Won the 2011 SEAS Entrepreneurial Concept Competition• Placed 2nd at the 2012 Darden Business Competition• Best Presentation Award at 2013 IEEE Conference on Localization
Journal Publications: • Kirti Chawla, Christopher McFarland, Gabriel Robins, and Wil Thomason,
An Accurate Real-Time RFID-Based Location System, 2014, In Submission• Kirti Chawla and Gabriel Robins, An RFID-Based Object Localization
Framework, International Journal of Radio Frequency Identification Technology and Applications, Inderscience Publishers, 2011, Vol. 3, Nos. 1/2, pp. 2-30
Conference Publications:• Kirti Chawla, Christopher McFarland, Gabriel Robins, and Connor Shope, Real-Time RFID Localization
using RSS, IEEE International Conference on Localization and Global Navigation Satellite System, 2013, Italy, pp. 1-6
• Kirti Chawla, Gabriel Robins, and Liuyi Zhang, Efficient RFID-Based Mobile Object Localization, IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, 2010, Canada, pp. 683-690
• Kirti Chawla, Gabriel Robins, and Liuyi Zhang, Object Localization using RFID, IEEE International Symposium on Wireless Pervasive Computing, 2010, Italy, pp. 301-306
Patents:• Kirti Chawla and Gabriel Robins, System and Method For Real-Time RFID Localization, 2014• Kirti Chawla and Gabriel Robins, Real-Time RFID Localization Using Received Signal Strength (RSS)
System and Related Method, US Patent: 61/839,617, 2013• Kirti Chawla & Gabriel Robins, Object Localization with RFID Infrastructure,
WIPO Patent: 2012047559 A3, 2012; US Patent: 20130181869 A1, 2013
DeliverablesContributions
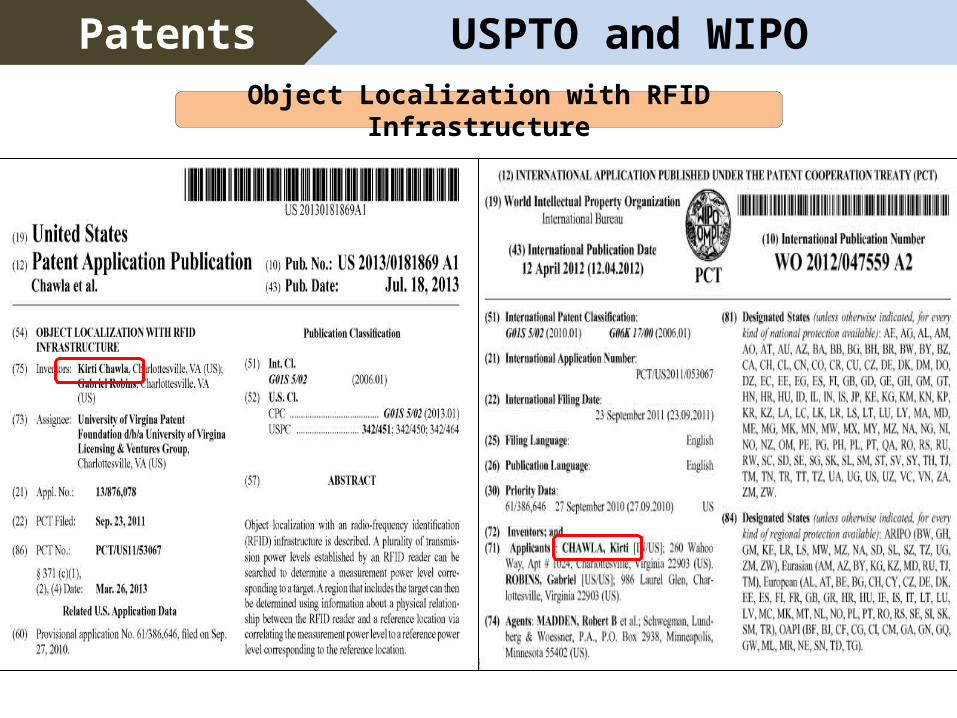
Object Localization with RFID Infrastructure
USPTO and WIPOPatents

Backup Slides

Backend: Minimize MisuseMotivation
Warehouse-Store
100, 000 Ft2
4000 Stores
Floor space and Nos.
Potential New Savings = $ 200 Million / Year
1 Million Items5 % Misuse Rate$ 1 / Item
Reported Misuse
Back
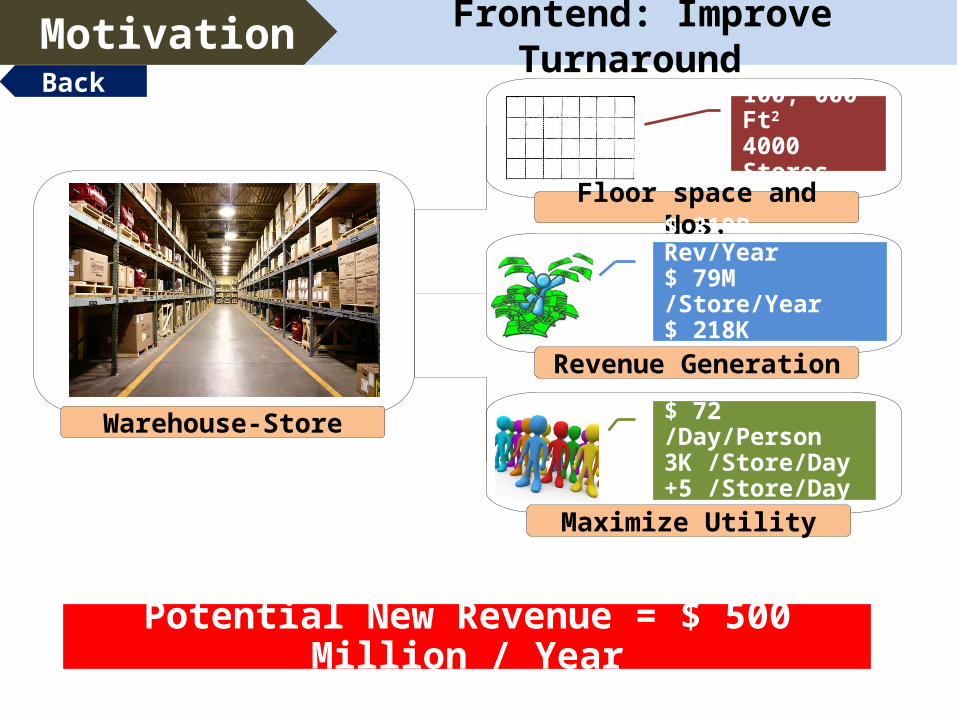
Frontend: Improve TurnaroundMotivation
Warehouse-Store $ 72 /Day/Person3K /Store/Day+5 /Store/Day
Maximize Utility
100, 000 Ft2
4000 Stores
Floor space and Nos.
Potential New Revenue = $ 500 Million / Year
$ 319B Rev/Year$ 79M /Store/Year$ 218K /Store/Day
Revenue Generation
Back

How Our Research Can Affect Your Bottom LineMotivation
$ 600 Million / Year
$ 200 Million / Year
$ 500 Million / Year
Stimulate Spending
$ 4.3 Billion / Year
Save Time
Improve Turnaround
Minimize Misuse

Localization ChallengesApproach
Radio Interference Occlusions Tag Sensitivity
Tag Spatiality Tag Orientation
Reader Locality

RFID Reader RFID Tag
Vertical Horizontal
Reliability through Multi-TagsApproach
Platform Side View
Parallel Orthogonal
RFID TagPlatform Top View
Problem: Optimal tag reads occur at certain orientations
Solution: Multi-Tags provide orientation redundancy

Power-Modulating AlgorithmsApproach
Linear Search Binary Search Parallel Search
O(#Tags Log#Power-Levels)
O(#Tags #Power-Levels)
O(#Power-Levels)
Reader Output Power Range
0 MAXMID
Back
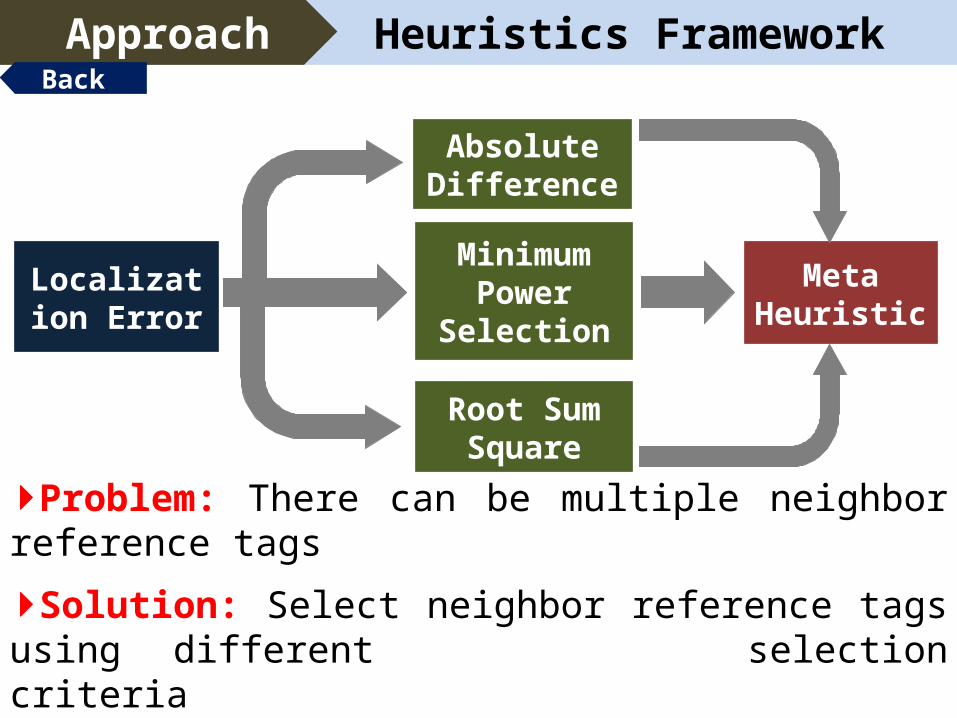
Heuristics FrameworkApproach
Root Sum Square
Minimum Power
Selection
Absolute Difference
Localization Error
Meta Heuristic
Back
Problem: There can be multiple neighbor reference tags
Solution: Select neighbor reference tags using different selection criteria
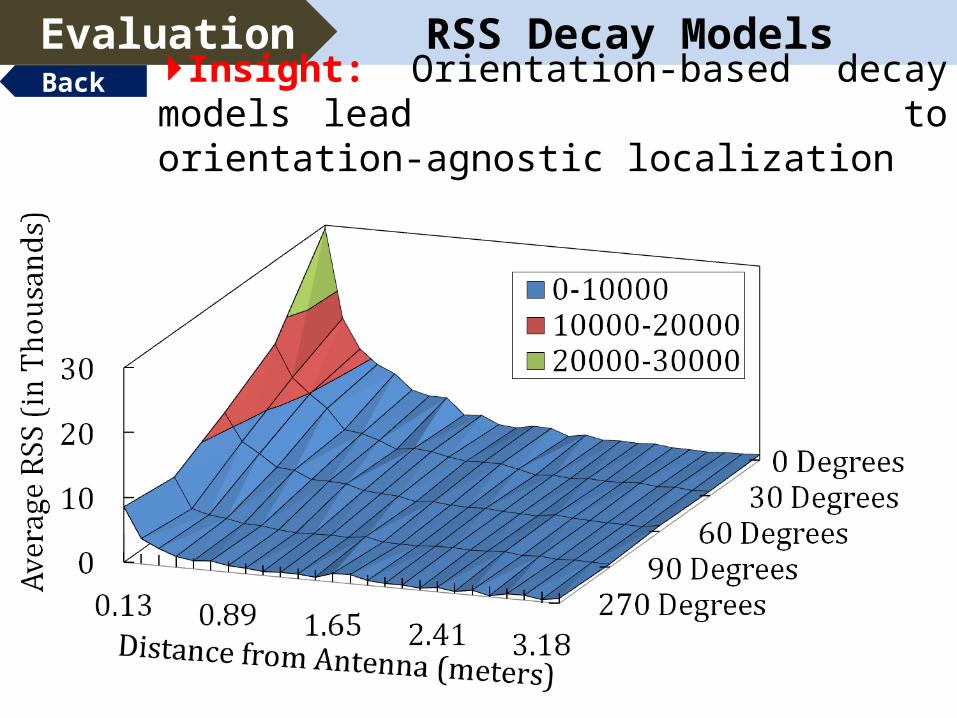
RSS Decay ModelsEvaluationBack Insight: Orientation-based decay models lead
to orientation-agnostic localization

TX-Side Localization TimeEvaluationBack Insight: Faster algorithms provide lower tag
detectability
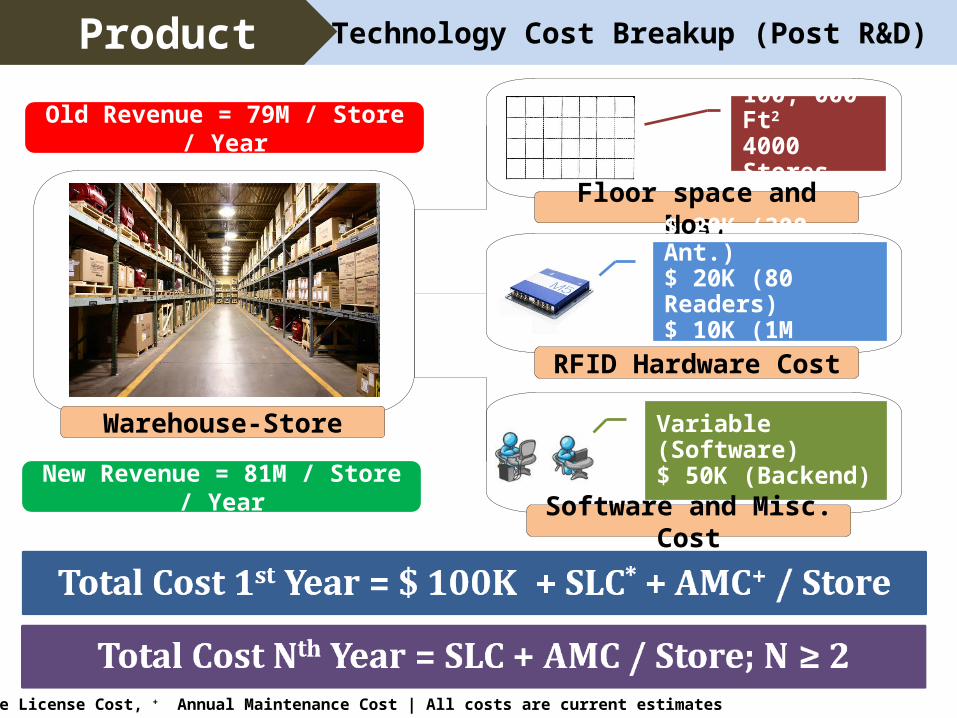
Technology Cost Breakup (Post R&D)Product
Warehouse-Store Variable (Software)$ 50K (Backend)
Software and Misc. Cost
100, 000 Ft2
4000 Stores
Floor space and Nos.
$ 20K (300 Ant.)$ 20K (80 Readers)$ 10K (1M Tags)
RFID Hardware Cost
* Software License Cost, + Annual Maintenance Cost | All costs are current estimates
Old Revenue = 79M / Store / Year
New Revenue = 81M / Store / Year

TX-Side AlgorithmsResearch
Locate Readers: Proximity-Sensing Algorithm
Problem: Locate readers using TX RF signal power
Solution: Sense proximity of neighbor tags

Ambient Noise: FrequencyEvaluation
RFID Lab (without) RFID Lab (with)
D M Lab Walmart