ants in the pants! an overview real world insect examples theory of swarm intelligence from insects...
TRANSCRIPT
Ants in the Pants!An Overview
Real world insect examples
Theory of Swarm Intelligence
From Insects to Realistic
A.I. Algorithms
Examples of AI applications

Bees Colony cooperation
Regulate hive temperature
Efficiency via Specialization: division of labour in the colony
Communication : Food sources are exploited according to quality and distance from the hive
Termites
Cone-shaped
outer walls and
ventilation ducts
Brood chambers
in central hive
Spiral cooling
vents
Support pillars

Ants
Organizing highways to and from their foraging sites by leaving pheromone trails
Form chains from their own bodies to create a bridge to pull and hold leafs together with silk
Division of labour between major and minor ants

Social Insects
Problem solving benefits include: Flexible
Robust
Decentralized
Self-Organized

Summary of Insects
The complexity and sophistication of Self-Organization is carried out with no clear leader
What we learn about social insects can be applied to the field of Intelligent System Design
The modeling of social insects by means of Self-Organization can help design artificial distributed problem solving devices. This is also known as Swarm Intelligent Systems.

Interrupt The Flow

The Path Thickens!
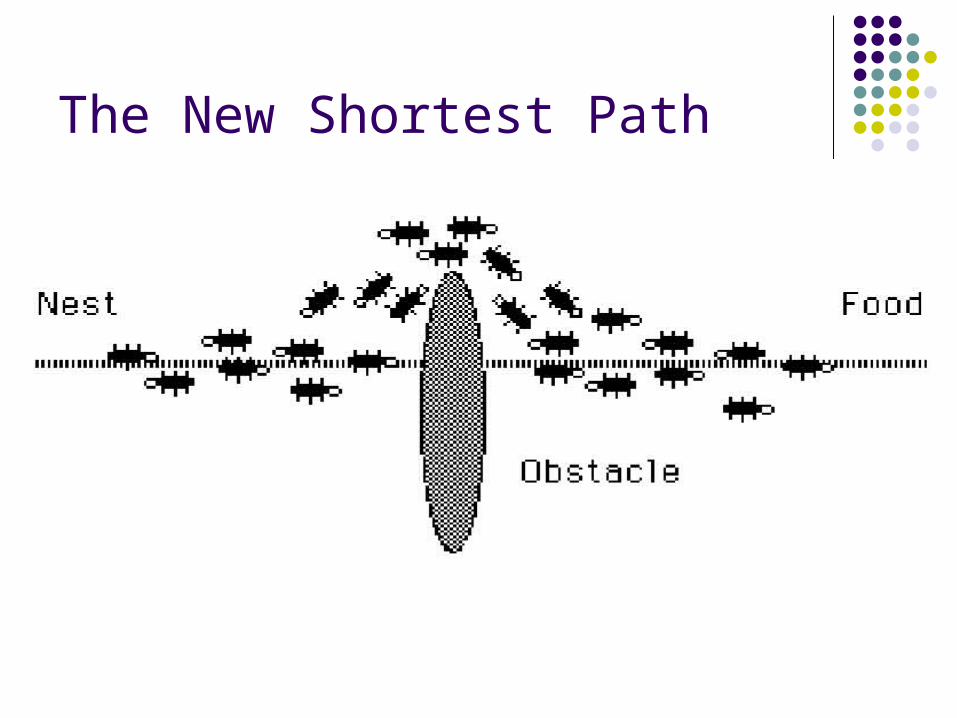
The New Shortest Path
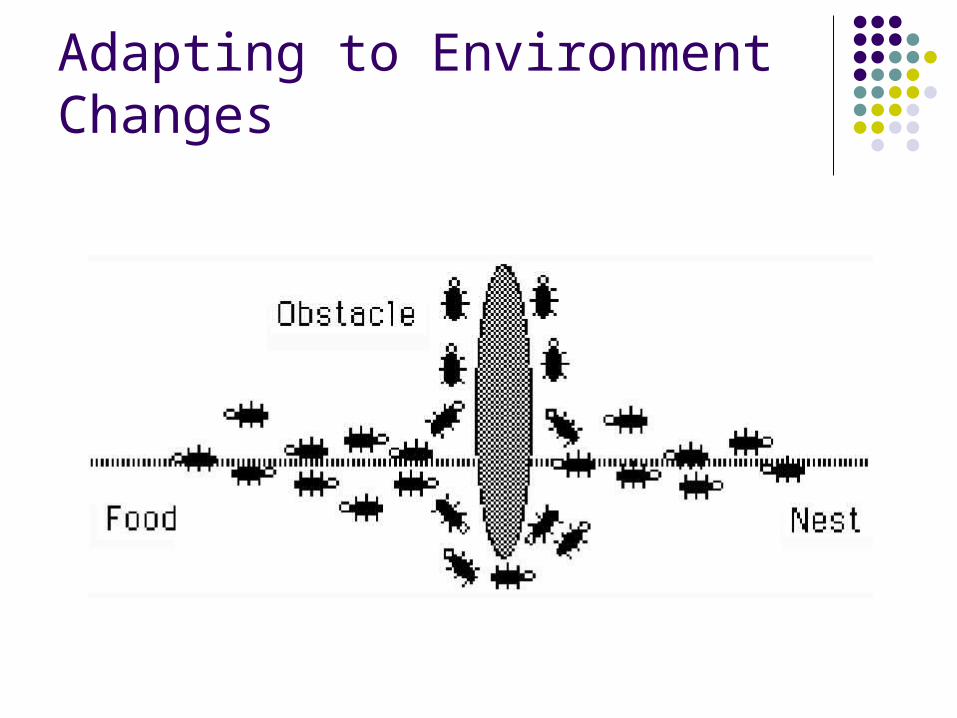
Adapting to Environment Changes

Four Ingredients of Self Organization
Positive Feedback Negative Feedback Amplification of Fluctuations -
randomness Reliance on multiple interactions

Types of Interactions For Social Insects
Direct Interactions Food/liquid exchange, visual contact,
chemical contact (pheromones)
Indirect Interactions (Stigmergy) Individual behavior modifies the environment,
which in turn modifies the behavior of other individuals


WEB CLUSTERINGWhy?The size of the internet has doubling its size every
year. Estimated 2.1 billion as of July 2001Organizing and categorizing document is not scalable
to the growth of internet.Document clustering? Is the operation of grouping similar document to
classes that can be used to obtain an analysis of the content.
Ant clustering algorithm categorize web document to different interest domain.

Ant Colony Models for Data ClusteringData clustering?
is the task that seek to identify groups of similar objects based on the value of their attributes.
Messor sancta ants collect and pile dead corpses to form “cemeteries” (Deneubourg et al. )
f: fraction of items in the neighborhood of the agent
k1, k2: threshold constants

Ant Colony Models for Data Clustering
The model later extend by Lume & Faieta to include distance function d, between data objects .
c is a cell, N(c) is the number of adjacent cells of c, alpha is constant

Homogeneous Multi-agent System for Document Clustering
Main components: colony of agents, feature vector of web document, 2D grid.
Rule: agent move one step at a time to an adjacent cell. Only a single agent and/or a single item are allowed to occupy a cell at a time. Picking up or dropping item based on Pp & Pd
N(c) = 8,oi is the item at cell i, g(oi) determine the similarity of oi and other item of oj, where j E N(c)
Density:

Homogeneous Multi-agent System for Document Clustering
r is the number of common term in doci and docj
m,n is the total number of term in doci and docj, respectively. F is the frequency
Similarity measure

Homogeneous Multi-agent System for Document Clustering

Experimental Results
Experimental data: 84 web pages from 4 different categories: Business, Computer, Health and Science. These web page have 17,776 distinct words.
Use 30x30 toroidal grid 15 agents. tmax is 300,000. k1 and k2 in [0.01, 0.2]
increment of 0.05 for each run.

Experimental Results t = 0

Experimental Results
t = 50,000

Experimental Results t = 200,000

Experimental Results
t = 300,000

Experimental Result
Table

Particle Swarm Optimization
Particle Swarm Optimization (PSO) applies to concept of social interaction to problem solving.
It was developed in 1995 by James Kennedy and Russ Eberhart [Kennedy, J. and Eberhart, R. (1995). “Particle Swarm Optimization”, Proceedings of the 1995 IEEE International Conference on Neural Networks, pp. 1942-1948, IEEE Press.] (http://dsp.jpl.nasa.gov/members/payman/swarm/kennedy95-ijcnn.pdf )
It has been applied successfully to a wide variety of search and optimization problems.
In PSO, a swarm of n individuals communicate either directly or indirectly with one another search directions (gradients).
PSO is a simple but powerful search technique.
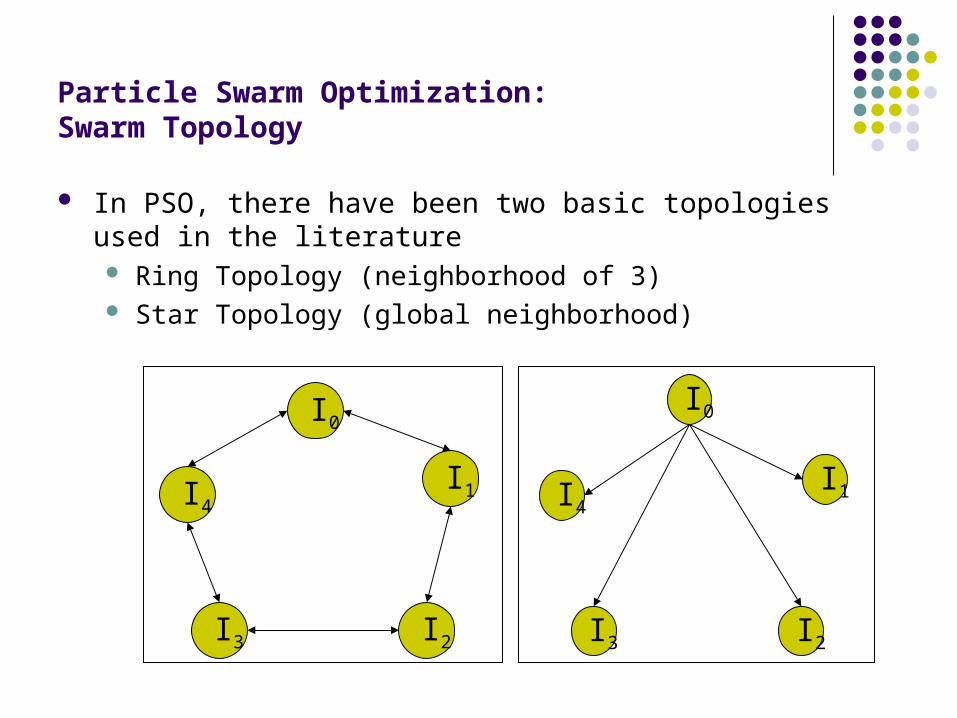
Particle Swarm Optimization:Swarm Topology
In PSO, there have been two basic topologies used in the literature Ring Topology (neighborhood of 3) Star Topology (global neighborhood)
I4
I0
I1
I2 I3
I4
I0
I1
I2 I3

Particle Swarm Optimization:The Anatomy of a Particle
A particle (individual) is composed of:
Three vectors: The x-vector records the
current position (location) of the particle in the search space,
The p-vector records the location of the best solution found so far by the particle, and
The v-vector contains a gradient (direction) for which particle will travel in if undisturbed.
Two fitness values: The x-fitness records the
fitness of the x-vector, and The p-fitness records the
fitness of the p-vector.
Ik
X = <xk0,xk1,…,xkn-1>P = <pk0,pk1,…,pkn-1>V = <vk0,vk1,…,vkn-1>
x_fitness = ?p_fitness = ?

Particle Swarm Optimization:Swarm Search
In PSO, particles never die! Particles can be seen as simple agents that fly through the
search space and record (and possibly communicate) the best solution that they have discovered.
So the question now is, “How does a particle move from on location in the search space to another?”
This is done by simply adding the v-vector to the x-vector to get another x-vector (Xi = Xi + Vi).
Once the particle computes the new Xi it then evaluates its new location. If x-fitness is better than p-fitness, then Pi = Xi and p-fitness = x-fitness.

Particle Swarm Optimization
5 10 15 20 25
5
10
15
20
25
pbest
gbest
v(k)v(k+1)
xgbestrandc
xpbestrandc
kvwkv
()
()
1
2
1
dtkvkxkx )1()()1(

Particle Swarm Optimization:Swarm Search
Actually, we must adjust the v-vector before adding it to the x-vector as follows:
vid = vid + 1*rnd()*(pid-xid) + 2*rnd()*(pgd-xid);
xid = xid + vid; Where i is the particle, 1,2 are learning rates governing the cognition and social
components Where g represents the index of the particle with the best p-
fitness, and Where d is the dth dimension.
Particle Swarm Optimization:Swarm Search
Intially the values of the velocity vectors are randomly generated with the range [-Vmax, Vmax] where Vmax is the maximum value that can be assigned to any vid.

Particle Swarm Optimization:Swarm Types
In his paper, [Kennedy, J. (1997), “The Particle Swarm: Social Adaptation of Knowledge”, Proceedings of the 1997 International Conference on Evolutionary Computation, pp. 303-308, IEEE Press.]
Kennedy identifies 4 types of PSO based on 1 and 2 . Given: vid = vid + 1*rnd()*(pid-xid) + 2*rnd()*(pgd-xid);
xid = xid + vid;
Full Model (1, 2 > 0) Cognition Only (1 > 0 and 2 = 0), Social Only (1 = 0 and 2 > 0) Selfless (1 = 0, 2 > 0, and g i)

Particle Swarm Optimization:Related Issues
There are a number of related issues concerning PSO: Controlling velocities (determining the best value for Vmax), Swarm Size, Neighborhood Size, Updating X and Velocity Vectors, Robust Settings for (1 and 2), An Off-The-Shelf PSO
Carlisle, A. and Dozier, G. (2001). “An Off-The-Shelf PSO”, Proceedings of the 2001 Workshop on Particle Swarm Optimization, pp. 1-6, Indianapolis, IN. (http://antho.huntingdon.edu/publications/Off-The-Shelf_PSO.pdf)

Particle Swarm:Controlling Velocities
When using PSO, it is possible for the magnitude of the velocities to become very large.
Performance can suffer if Vmax is inappropriately set. Two methods were developed for controlling the growth of
velocities: A dynamically adjusted inertia factor, and A constriction coefficient.

Particle Swarm Optimization:The Inertia Factor
When the inertia factor is used, the equation for updating velocities is changed to: vid = *vid + 1*rnd()*(pid-xid) + 2*rnd()*(pgd-xid);
Where is initialized to 1.0 and is gradually reduced over time (measured by cycles through the algorithm).

Particle Swarm Optimization:Swarm and Neighborhood Size
Concerning the swarm size for PSO, as with other ECs there is a trade-off between solution quality and cost (in terms of function evaluations).
Global neighborhoods seem to be better in terms of computational costs. The performance is similar to the ring topology (or neighborhoods greater than 3).
There has been little research on the effects of swarm topology on the search behavior of PSO.

Particle Swarm Optimization:Particle Update Methods
There are two ways that particles can be updated: Synchronously Asynchronously
Asynchronous update allows for newly discovered solutions to be used more quickly
I4
I0
I1
I2 I3

Satellite
Maintenance
The Future?Medical
Interacting Chips in
Mundane Objects
Cleaning Ship
Hulls
Pipe Inspection
Pest Eradication
Miniaturiz
ation
Engine Maintenance
Telecommunications
Self-Assembling
Robots
Job Scheduling
Vehicle Routin
g Data Clustering
Distri
buted M
ail
Syste
ms
Optim
al
Resource
Allocation
Combinatorial
Optimization

Dumb parts, properly connected into a swarm, yield smart results.