artificial muscles based on electroactive polymers · artificial muscles based on electroactive...
TRANSCRIPT
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
Artificial Muscles Based on Electroactive Polymers
Narges Mortezaei
Supervisor: Andreas Sandström

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
1
Abstract: For many years Electroactive Polymers (EAPs) were the unknown materials for scientists
and engineers, and they did not achieve to the wonderful features of these important materials. In
recent years, the appearance of EAP has created an exceptional evolution in the field of organic
materials. [2] The significant feature of Electroactive Polymers is stimulation by electric field, enable
potential for new electroactive materials. The main remarkable characteristic of EAPs is their similarity
to biological muscles, especially their ability to deform, bend, and change their size in the presence of
electricity. The main aim of this project is to describe the origin of EAP materials, their characteristics,
categories, and their usage in different fields of science and industry. This report implys to some of the
devices which use Electroactive Polymers as the foundation of their function and also recent
implementation in engineering, industry and medicine will be presented.
Table of contents:
Introduction………………………………………………………………………………………………………………………………….2
Electroactive Polymers, advantages and disadvantages:……………………………………………………………..3
Specific Electroactive Polymers: …………………………………………………………………………………………………..4
Ferroelectric polymers ……………………………………………………………………………………………………….4
Dielectric elastomer EAPs…………………………………………………………………………………………5
Magnetically Activated polymer ………………………………………………………………………………..5
Electrest …………………………………………………………………………………………………………………………….6
Ionic Polymer Gels ……………………………………………………………………………………………………………..7
Nonionic Polymer Gels ……………………………………………………………………………………………………….7
Metal Hydride Artificial Muscle system ………………………………………………………………………………7
Ionic Polymer-Metal Nanocomposites ……………………………………………………………………………….8
Engineering, Industrial and Medical Application of Ionic Polymer-Metal Nanocomposite ………….9
Microelectromechanical Systems ……………………………………………………………………………………….9
Diaphragh Pumps ……………………………………………………………………………………………………………….9
Artificial Ventricular or Cardiac-assist Muscles ………………………………………………………9
Correction of Refractive Errors of the Humans eye ……………………………………………………………10
Other Kinds of Artificial Muscles …………………………………………………………………………………………………11
Artificial muscle based on liquid crystal elastomers ………………………………………………………….11
Dust Wiper for the Nanorover ………………………………………………………………………………………….11
Gripper and Robotic arm lifter ………………………………………………………………………………………….12

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
2
Introduction:
In recent years new polymers have been developed that react to electrical stimulus, and as a result of
this stimulation, considerable change occurs in the shape and size of these materials. These Polymers
are called Electroactive Polymers (EAP) and their attractive characteristics have attracted the attention
of scientists from many different fields. [3]
Roentgen was the first person who invented Electroactive Polymers, in 1880.He focused on rubber
band. His main discovery was that, change the shape of the rubber by being charged or discharged. [1]
Sacerdot was the person who formulated the strain response to electric field activation in polymers
based on Roentgens work, in 1899. [1]
In 1925 Eguchi discovered piezoelectric polymers. Polymers which are stimulated chemically were
discovered more than half a century ago. [1] However, electrical stimulation of polymers has remained
the best way of Electroactive material actuation and sensing. Shahinpoor and Mojarrad (1994, 1996,
1997a, 1997b, 1997c, 1997d, 2000) were the pioneers in making electrically active Ionic Polymer
Conductor Nanocomposites (IPCNCs) and Ionic polymer-metal nanocomposites (IPMNCs).
Electroactive Polymers are simple, light weight and highly flexible that can bend or stretch when put
into contact with electricity or chemicals. [1] They are resilient and plastic and might be used to imitate
human muscle movement. Since EAPs have the behavior so similar to biological muscles, they have
been named “Artificial Muscles”. [3] Artificial muscles are human made materials that tries to
reproduce the two main characteristics of real muscles, elasticity and contractility.
Artificial Muscles response to various external stimulus (Ion concentration, electric field, temperature,
light, etc). In addition to classical materials, such as piezoelectric ceramics and shape memory alloys,
polymer-based artificial muscles have become the most muscle like material since 1990s.
Fig 1.Grand challenge for the development of EAP actuated robotics. [3]
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
3
Electroactive Polymers Advantages and disadvantages:
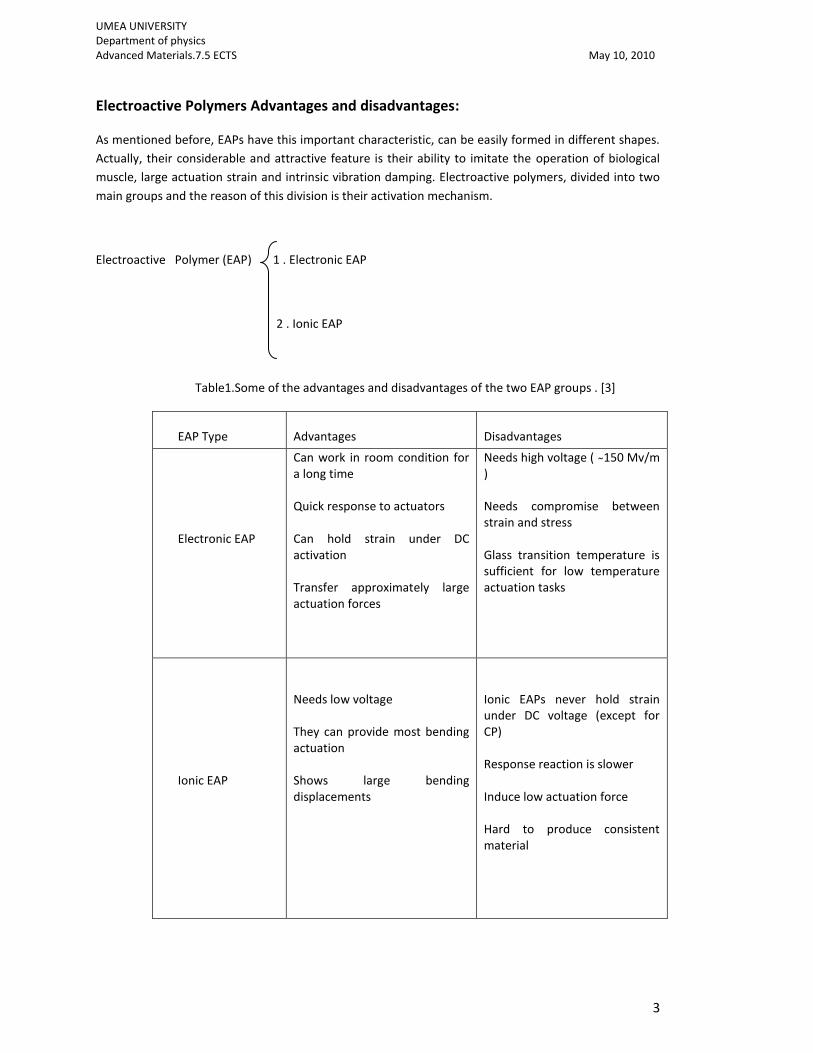
As mentioned before, EAPs have this important characteristic, can be easily formed in different shapes.
Actually, their considerable and attractive feature is their ability to imitate the operation of biological
muscle, large actuation strain and intrinsic vibration damping. Electroactive polymers, divided into two
main groups and the reason of this division is their activation mechanism.
Electroactive Polymer (EAP) 1 . Electronic EAP
2 . Ionic EAP
Table1.Some of the advantages and disadvantages of the two EAP groups . [3]
EAP Type
Advantages
Disadvantages
Electronic EAP
Can work in room condition for a long time Quick response to actuators Can hold strain under DC activation Transfer approximately large actuation forces
Needs high voltage ( ̴150 Mv/m ) Needs compromise between strain and stress Glass transition temperature is sufficient for low temperature actuation tasks
Ionic EAP
Needs low voltage They can provide most bending actuation Shows large bending displacements
Ionic EAPs never hold strain under DC voltage (except for CP) Response reaction is slower Induce low actuation force Hard to produce consistent material

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
4
Specific Electoractive Polymers:
The table below shows the brief division of some specific EAPs based on their categories:
Table 2.The list of leading EAP materials [4]
Ferroelectric polymers:
These kinds of polymers are based on the feature in the name of Piezoelectricity and they can be found
only in nanocentro-symmetric materials and the phenomenon is called ferroelectricity.
Ferroelectric polymers are partly crystalline and they have young’s modulus near 1-10 Gpa. So these
high elastic modulus cause high mechanical energy density. Ferroelectric EAP polymers can be worked
in air, water, and vacuum in different temperature rate.
According to these features they can be used as sensor, transducers and actuators.
Electronic EAP Ionic EAP
Dielectric elastomer EAP Electrostrictive graft elastomers and paper Electro-viscoelastic elastomers Ferroelectric polymers Liquid crystal elastomers
Carbon nanotubes Conductive polymers Electrorheological fluids Ionic polymer gels Ionic polymer metallic composite

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
5
Dielectric elastomer EAPs:
These kinds of polymers have low elastic stiffness modulus and a high dielectric constant. They can
make large actuation strain by subjecting them to the electric field. Also because of some of their
specific features they are known as electrostatically stricted polymer (ESSP). Figure2 Shows an EAP
actuator that was made using silicon film. [3]
Fig2. Dielectric elastomer under electro activation expands laterally and can be made to work
longitudinaly. [3]
Magnetically Activated polymer:
Magnetically activated gels (Ferrogels) are kinds of polymers that are swollen in the presence of a
magnetic field. Zriniy (1999) was an inventor of this technology.
Such polymers deform in the presence of a “spatially” nonuniform magnetic field. The ferrogel can be
activated to deform, bend, curve, and elongate and its response time is less than 100 ms. [1]
Ferrogels with magnetic nano particles contracted in nonuniform magnetic field, which is smaller than
the field observed on the surface of a common permanent magnet. By coordinating and controlling the
magnetic field, muscle-like movement can be gained. This feature can be used in manufacturing
artificial muscles. [2]

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
6
Fig 3. Robot hand with four smart gel fingers hold an egg. [5]
In magnetically activated polymers (Ferrogels), magnetic atoms are under constant random disturbance,
when not under a magnetic field. It was observed that the magnetization of Ferrogels is directly related
to the concentration of the magnetic atoms. [2]
Electrest :
Electrest are kinds of materials that retain their electric polarization in the presence of strong electric
field.
The significant characteristic of these materials is that, the negative and positive charges inside the
polymer are displaced along and against the direction of the electric field, and make a polarized
material.
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
7
Ionic Polymer Gels:
Polymer gels can be combined to build the strong actuators with the potential of matching the force
and the energy density of biological muscles.
These kinds of materials are activated by a chemical reaction, changing from acid to alkaline and this
can be cause the gel to become dense or swollen.
Also this reaction can be stimulated by electric field too, which was shown by Shahinpoor and Mojarrad
(1994, 1996, 1997a, 1997b, 1997c, 1997d, 2000).
Nonionic Polymer Gels:
Nonionic polymer gels is a kind of polymers which contain a dielectric solvent and it can be swell under
a DC electric field with a considerable strain. [1]
Hirai has invented crawling and bending nonionic electroactive polymers at Shinshu University in 1995-
1999.
Metal Hydride Artificial Muscle system:
The combination of hydrogen and metal or metal alloy can produce the synthetice which can absorb
considerable amount of hydrogen.This phenomenon can be used to build artificial muscle system.
The main characteristics of these combinations (metal hydrides) are their large uptake/discharge ability
of hydrogen, safe operation and fast kinetics. [1]

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
8
Ionic Polymer-Metal Nanocomposites:
Ionic polymer-metal composites are particular polymers, when subjected to an imposed bending stress
exhibit a considerable change across the chemically or physically placed electrodes of EAP. They can be
bend in the response to a small electric field (5-10 v ̷ mm).
Oguro and his co-worker are the first person who reported IPMC as an active polymeric material, in
1993.
After that, much focus has been given to IPMC, and scientists hope that they can be used IPMC
materials as a soft actuator and sensor material for new usage in the future engineering.
Also they can be used for Biorobotic applications. The two important characteristic which distinguish
IPMC from others are:
1) Intrinsic sensing characteristics in addition to its actuation capabilities. [2]
2) Under an applied electric field IPMCs can move and can also create a current from an imposed
bending moment that is applied to the polymer. [2]
Fig 4.Redistribution of charges in an IPMC under electric field.[6]
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
9
Engineering, Industrial and Medical Application of Ionic Polymer-Metal
Nanocomposite:
There are many applications which use ionic polymer-metal nanocomposites as actuator, artificial
muscles, and transducer. [1]
This chapter talks about these applications in different fields.
Microelectromechanical Systems:
Microelectromechanical system or MEMS, are kinds of mechanical devices which are made by
electroactive polymers and IPMNCs. The most important problem about how to build small devices,
were solved by arrival of MEMS. When components become smaller, the problems become more
obvious.
As mentioned before IPMNC materials are lighter and their stimulation capability is more than EAC
materials, they can be used for robotic microarticulation. According to previous knowledge IPMNC
materials can be easily formed in different shapes so they are practical in manufacturing MEMS. They
can be designed to imitate the operation of muscles.
The MEMS devices are very small, but this technology does not only talk about size. Actually, MEMS is a
new way of making complex electromechanical systems, by usage of IPMNC sensors and actuators. The
MEMS has significant effect on the branches of commercial and military products. In these days MEMS
technology been used for diverse purposes from controlling blood pressure to active suspension
systems for cars to airbag accelerometers. [1]
Diaphragm Pumps:
Diaphragm pumps can be made by fixing two planar parts of relatively different sizes of IPMNC sections
and properly placing electrodes on the resulting. This method allows modulation of the volume trapped
between the IPMNCs. Applying the voltage with specific amplitude and frequency can be used to
control the flow and volume of fluid being pumped. [1]
Also Ionic polymer-metal nanocomposite diaphragm pump can be manufactured in various ways. Single
or multiple IPMNC can function as the diaphragms which create positive volume displacement. [1]
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
10
Artificial Ventricular or Cardiac-assist Muscles:
Artificial ventricular assist muscle like EAPs that they can help the persons suffering from abnormalities
associated with cardiac muscle operations. [1]
This device made up of IPMNC biomimetic sensors, actuators and artificial muscle which work as a heart
compression and they are placed in the external part of the heart without interfering with the internal
blood circulation. So this device avoid of thrombosis by assist weak heart to produce more pressure and
to pump more blood from one side to the other side. In addition, arrhythmia control of the beating
heart can be provided by artificial ventricular. [1]
Correction of Refractive Errors of the Humans eye:
One of the most significant applications of IPMNCs in medicine is its application in the human eye which
involves the static or dynamic surgical correction of the refractive errors. In this system the muscle of
the patients eye can be activate by means of push-button switch which is battery operated, to avoid
leakage and control discharge. [1]
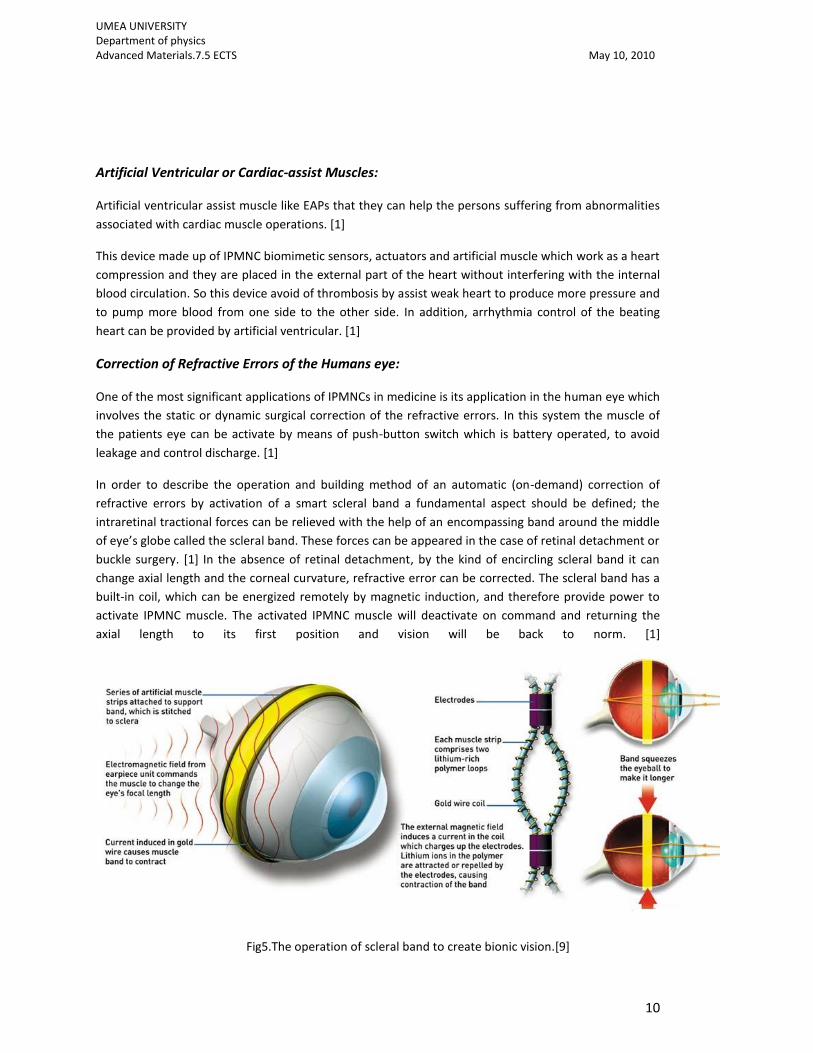
In order to describe the operation and building method of an automatic (on-demand) correction of
refractive errors by activation of a smart scleral band a fundamental aspect should be defined; the
intraretinal tractional forces can be relieved with the help of an encompassing band around the middle
of eye’s globe called the scleral band. These forces can be appeared in the case of retinal detachment or
buckle surgery. [1] In the absence of retinal detachment, by the kind of encircling scleral band it can
change axial length and the corneal curvature, refractive error can be corrected. The scleral band has a
built-in coil, which can be energized remotely by magnetic induction, and therefore provide power to
activate IPMNC muscle. The activated IPMNC muscle will deactivate on command and returning the
axial length to its first position and vision will be back to norm. [1]
Fig5.The operation of scleral band to create bionic vision.[9]
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
11
Other Kinds of Artificial Muscles:
Artificial muscle based on liquid crystal elastomers:
Artificial crystal elastomers are kinds of polymers which consist of repeated series of main-chain
nematic LC polymers and typical rubber blocks based on the lamellar phase of triblock copolymer RNR.
[8]
Liquid crystal elastomers combine the orientational ordering feature of LC system and the rubbery
elastic characteristic of polymer networks. De Gennes was the first person who found the elastomers as
artificial muscles. They are based on the LC phases and divided into two categories, nematic and smetic
LC elastomers and theiractoin mechanism is different. [8]
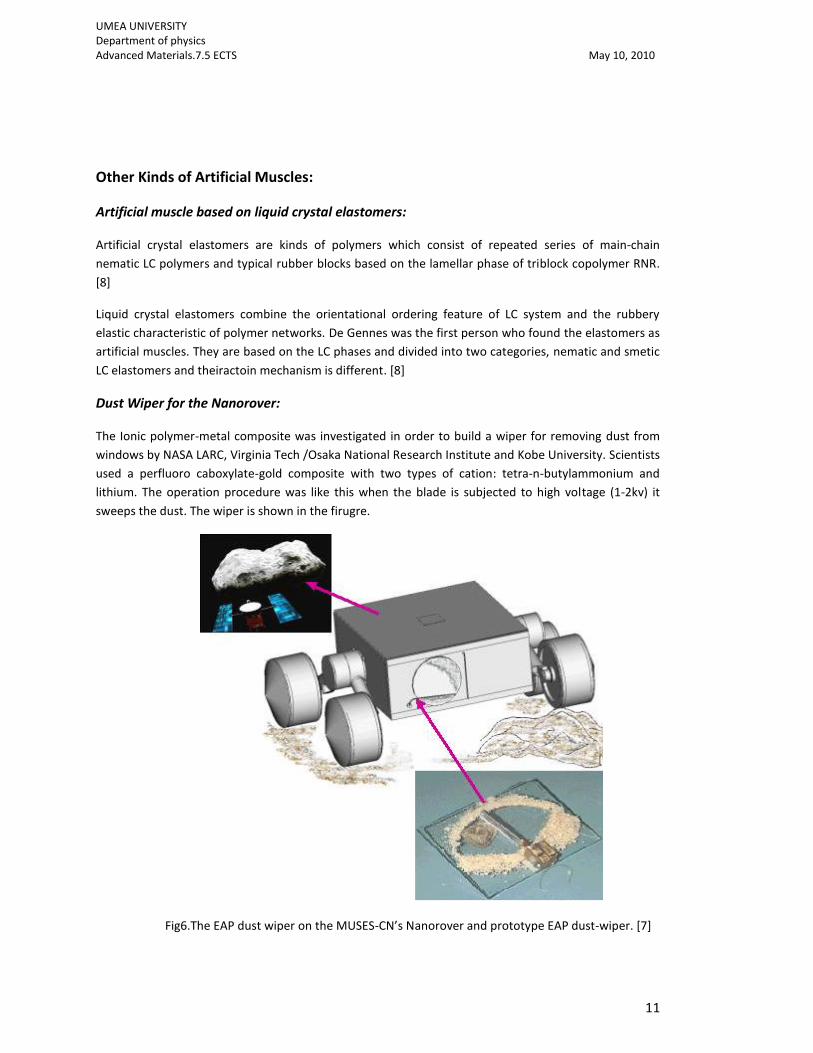
Dust Wiper for the Nanorover:
The Ionic polymer-metal composite was investigated in order to build a wiper for removing dust from
windows by NASA LARC, Virginia Tech /Osaka National Research Institute and Kobe University. Scientists
used a perfluoro caboxylate-gold composite with two types of cation: tetra-n-butylammonium and
lithium. The operation procedure was like this when the blade is subjected to high voltage (1-2kv) it
sweeps the dust. The wiper is shown in the firugre.
Fig6.The EAP dust wiper on the MUSES-CN’s Nanorover and prototype EAP dust-wiper. [7]

UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
12
The devices which are applied in the space flight needs identifying and addressing all the probable
problems which might be happened. For this purpose, series of solution were identified for the IPMC
dust wiper. Some of them are, require to protect the ionic constituents (prevent from dehydration),
decrease off-axis deformation, increase the actuation force, maintain the extreme temperature range
and vacuum for at least three years and avoid of electrolysis. [4] Success of dust-wiper in these different
tests, led to its selection as baseline component of the Nanorover’s optical /IR window in the MUSES-CN
mission.
Gripper and Robotic arm lifter:
In order to build a longitudinal actuator a dielectrit elastomer EAP material was suitable to use. The
operation system is begin by subjecting a film which made of Electroactive polymer and it has flat
flexible electrode on both sides compacts the film and making it wider when maintaining the volume.
An electroactive polymer was built when the film scrolled with insulation to a shape of rope. Then, the
four-finger mechanism was developed in order to construct a gripper in support of the robotic arm. The
fingers were built from Ionic polymer-metal composite and have hooks to imitating the human fingers.
Fig7.The four-finger EAP Gripper lifting 10.3g rock under 5 v. [6]
UMEA UNIVERSITY Department of physics Advanced Materials.7.5 ECTS May 10, 2010
13
References:
[1]. Shahinpoor.Mohsen , Kim.Kwang Jin , Mojarrad.Mehran., ”Artificial Muscles: Application
of Advanced polymeric Nanocomposites“, ISBN-13:978-1-58488-713-3(Hardcover),ISBN-10:1-
58488-713-3(Hardcover),CRC Press, Taylor and Francis Group.(P1-393){1(1):p352},{1(2):p343}-
{1(3):p357},{1(4):p359},{1(5):p364}
[2].Kim.Kwang Jin, Tadokoro.Satoshi, “Electroactive Polymers for Robotic Application: artificial
muscles and sensors“, ISBN: 0-8194-4054-X, ISSN: 99-2432839-6,1998, Springer-Verlag London
Limited 2007.(P1-263)
[3].Bar-Cohen.Y, ”Electroactive Polymers as Artificial Muscles-Reality and Challenges”,
Proceedings of 42nd AIAA Structures, Structural Dynamics, and Materials Conference (SDM),
Gossamer Spacecraft Forum(GSF), held in seattle WA, April 16-19 2001, Paper #2001-1492.
[4].Bar-Cohen.Y, ”Artificial muscles based on electroactive polymers as an enabling tool in
biomimetics”, Advanced Technology,Jet Propulsion Laboratory, California Institute of
Technology, 15 November 2006, Special Issue Paper #1149.
[5].Shiga.Tohru, ”Synthetic Muscle”, Toyota Central Reseach and Development Laboratories
Jpan, Copyright c 2000 Elsevier Science Ltd,ISBN:0-08-0431526.
[6].Shahinpoor.M, Bar-Cohen.Y, Xue.T,Simpson.J.O,Smith.J, ”Ionic Polymer-Metal Compisites
(IPMC) As Biomimetic Sensor and Actuators ”, Proceedings of SPIE’s 5th Annual International
Symposium on Smart Structures and Materials, Paper #3324-27, SPIE c Copyright 1998.
[7]. Bar-Cohen.Y, ”Electroactive Polymers az Artificial Muscles – Capabilities, Potentials and
Chalenges”, Handbook of Biomimetics, Yoshihito Osada(Chief Ed), Section11, in chapter
8,”Motion”, paper #134,publisher: NTS Inc., Aug.2000.
[8].Li.Min-Hui, Keller.Patrick, ”Artificial muscles based on liquid crystal elastomers”, Phil,
Trans.R.Soc.A2006364,2763-2777.doi:10, 1098/rsta.2006.1853.Published on 21 August2006.
[9].Zandonella.C, Marks.P, ”Eyeball squeezing could correct sight”, 21 March 2002.
http://www.newscientist.com/article/dn2064-eyeball-squeezing-could-correct-sight.html