augmented design capabilities for origami tessellations
TRANSCRIPT

Brigham Young UniversityBYU ScholarsArchive
All Theses and Dissertations
2018-06-01
Augmented Design Capabilities for OrigamiTessellationsJanette Darlene HerronBrigham Young University
Follow this and additional works at: https://scholarsarchive.byu.edu/etd
Part of the Mechanical Engineering Commons
This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in All Theses and Dissertations by anauthorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected].
BYU ScholarsArchive CitationHerron, Janette Darlene, "Augmented Design Capabilities for Origami Tessellations" (2018). All Theses and Dissertations. 6855.https://scholarsarchive.byu.edu/etd/6855

Augmented Design Capabilities
for Origami Tessellations
Janette Darlene Fernelius Herron
A thesis submitted to the faculty ofBrigham Young University
in partial fulfillment of the requirements for the degree of
Master of Science
Larry L. Howell, ChairSpencer P. Magleby
Eric R. Homer
Department of Mechanical Engineering
Brigham Young University
Copyright © 2018 Janette Darlene Fernelius Herron
All Rights Reserved

ABSTRACT
Augmented Design Capabilitiesfor Origami Tessellations
Janette Darlene Fernelius HerronDepartment of Mechanical Engineering, BYU
Master of Science
Applying engineering principles to tessellation origami-based designs enables the controlof certain design properties, such as flexibility, bending stiffness, mechanical advantage, shapeconformance, and deployment motion. The ability to control these and other properties will enableaugmented design capabilities in environments which currently limit the design to specific mate-rials, including space, medicine, harsh environments, and scaled environments (such as MEMSapplications). Other applications will be able to achieve more complex motions or better satisfydesign and performance requirements.
This research demonstrates augmented design capabilities of origami tessellations in engi-neering design in rigid-foldable and non-rigid-foldable applications. First, a method to determinePoisson’s ratio and mechanical advantage for deployable, rigid-foldable tessellations is presented.The results enable the selection and tailoring of patterns based on deployment motion of specificpatterns.
Secondly, a model that predicts the deployment stability of the non-rigid-foldable triangu-lated cylinder is presented. This model defines the geometry needed to obtain a maximum deployedheight, always return to a closed position, or remain in either the open or closed configurations.The Stability Transition Ratio is the ratio of the inner to outer diameter that marks the point be-tween monostable and bistable behavior in a triangulated cylinder and is dependent only on thenumber of sides.
Lastly, this work presents methods to reduce sag in adult diapers by increasing shape con-formance, promoting wicking capabilities, and improving the structure through the implementa-tion of origami tessellations. Several basic fold patterns were evaluated and the results reported.Reducing sag increases comfort and decreases leaking.
Keywords: Origami, predictable behavior, triangulated cylinder, tessellations, adult diapers

ACKNOWLEDGMENTS
I am grateful to Dr Larry L. Howell, Dr Spencer P. Magleby, and Dr Eric R. Homer for
their support, guidance, and encouragement throughout my education and especially during my
research work.
I am also grateful to my parents and my husband for believing in me and encouraging me
to believe in myself.
The analysis of Poisson’s ratio in tessellation origami for deployable mechanisms is based
on work supported by the National Science Foundation and the Air Force Office of Scientific Re-
search under NSF Grant EFRI-ODISSEI-1240417. The support of the BYU Office of Research and
Creative Activities, through an ORCA Student Mentoring Grant, and the assistance of Katherine
Jensen in the analysis of the Triangular Waterbomb Base unit cell are also acknowledged.
The analysis of the triangulated cylinder is based on work supported by the National Sci-
ence Foundation and the Air Force Office of Scientific Research under NSF Grant No. EFRI-
ODISSEI-1240417. Jared Butler and Brandon Sargent were instrumental in the analysis and early
drafts of this work.
The analysis of origami and origami-inspired improvements to adult diapers is based on
work supported by the National Science Foundation and the Air Force Office of Scientific Research
under NSF Grant No. EFRI-ODISSEI-1240417.

TABLE OF CONTENTS
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
NOMENCLATURE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
Chapter 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Chapter 2 Method for customizing deployment motion through modifying Poisson’sratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Related work in tessellations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4.1 Miura-Ori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4.2 Barreto’s Mars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4.3 Rectangular Waterbomb base . . . . . . . . . . . . . . . . . . . . . . . . . 142.4.4 Triangular Waterbomb base . . . . . . . . . . . . . . . . . . . . . . . . . . 142.4.5 Rigid foldable brick wall . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Application to mechanical advantage . . . . . . . . . . . . . . . . . . . . . . . . . 162.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Chapter 3 Stability Transition Ratio of the TriangulatedCylinder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2 Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.1 Additional Findings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Chapter 4 Exploring Feasibility of Origami-Inspired Innovations for Shape Confor-mance, Wicking, and Structure for Improved Adult Diapers . . . . . . . . 31
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2 Shape Conformance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.3 Wicking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.4 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Chapter 5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
iv

LIST OF TABLES
3.1 The stability transition ratio (STR) for various values of n and Do, showing a depen-dence on n and no dependence on Do. The STR values for each n were equivalent to13 significant digits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
v

LIST OF FIGURES
1.1 Flow chart illustrating the types of deployability and other mechanics of origami ad-dressed in this work. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 Square Waterbomb Base unit cell, Left: unit cell dimensions, Right: partially deployedunit cell with deployment angle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Miura-Ori unit cell, Left: unit cell dimensions, Center: partially deployed unit cellwith deployment angle, Right: Poisson’s ratio as a function of deployment angle. . . . 9
2.3 A:Sink Miura-Ori unit cell, B: traditional Miura-Ori, C: Case 1 (l1 6= l2, l3 = l4), D andE: Case 2 (l1 = l2, l3 6= l4), F and G: Case 3 (l1 6= l2, l3 6= l4). . . . . . . . . . . . . . . 10
2.4 Poisson’s ratio of Case 1 (l1 6= l2, l3 = l4) as a function of deployment angle. . . . . . . 112.5 Barreto’s Mars unit cell, Left: unit cell with dimensions, Center: partially deployed
unit cell with deployment angle, Right: Poisson’s ratio as a function of the deploymentangle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 Triangular waterbomb base unit cell, Left: unit cell dimensions, Center: partially de-ployed unit cell with deployment angle, Right: Poisson’s ratio as a function of deploy-ment angle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.7 Modified brick wall unit cell, Left: unit cell dimensions, Center: partially deployedunit cell with deployment angle, Right: Poisson’s ratio as a function of the deploymentangle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.8 Mechanical advantage as a function of deployment angle. Top row, left to right: Miura-Ori, Barreto’s Mars, Bottom row, left to right, Triangular Waterbomb base, and Modi-fied Brick. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Triangulated cylinder pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Comparison of various triangulated cylinder patterns with n= 6 and a fixed outer diam-
eter of 50 mm. The inner diameter was varied to obtain different diametric ratios.Thesolid line indicates a pattern with monostability and the other plots indicate patternswith various bistable behaviors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 The strain results from an ANSYS APDL triangulated cylinder model (n = 6, Do = 50mm, and Di = 22.5 mm) after deployment from the stowed to the deployed state,showing strain in creases b and c and negligible strain in the panels. The maximumstrain occurs in c at the top and bottom segments of the crease, and is more than twicethe strain exhibited in b. From this it may be assumed that the strain in c governs thestrain of the system. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 The strain energy local maximum approaches zero as the diametric ratio is increased.The curve fit enables the calculation of the Stability Transition Ratio (STR), which isthe diametric ratio for which all greater ratios are monostable and all lesser ratios arebistable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5 The Stability Transition Ratios for n = 3 : 15, with two exponential curve fits. Thecurve fit equations approximate physically discrete functions with a theoretically con-tinuous function and should only be used at integer values for n. The shaded regionshows where monostable behavior would be expected and the unshaded region showswhere bistable behavior would be expected. . . . . . . . . . . . . . . . . . . . . . . . 26
vi

3.6 The strain energy curves verses deployment angle, calculated from Equation 3.23. Ex-ample results using various n values are shown in the plot. The corresponding STRvalues for each n were used as the diametric ratios. . . . . . . . . . . . . . . . . . . . 28
3.7 The deployed height of patterns, using the STR and Do = 50 mm for n = 3 : 15. Themagnitude of deployment height is scaled by the value of Do, while the trends remainsconstant. The deployment height increases until n = 8, then decreases from n = 9 ton = 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1 Possible variations of the fan pattern for implementation in an adult diaper to improveshape conformance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Each shape conformance sample was manually stretched over a non-developable sur-face. The distance along the surface between four sets of points was measured, andthe percent stretch for each set was determined. The amount of stretch in each patternrepresents a modified, conforming fit to a non-developable surface. Results are shownin Figure 4.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3 Shape conformance of selected origami-inspired patterns to a non-developable surfaceis illustrated, showing variable stretch at four different locations of the pattern, com-pared with the stretch of unaltered fabric. The distance between these points werenormalized by the original, unstretched lengths in each location. The stitched patternswere modified from the traditional origami patterns to preserve deployment motion.From these results it may be concluded that predictable stretch is obtained throughappropriate selection of origami and origami-inspired patterns. . . . . . . . . . . . . . 35
4.4 The test set up for the wicking tests. Each sample contained 84 cm2 of fabric. Allsamples were weighted with paperclips and placed in the colored water at the sametime. The wicking height was measured after five minutes. Results are shown inFigure 4.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.5 Average wicking results for Cotton Jersey and Bamboo fabrics in both the warp andweft directions. These results show that adding layers, either through layering or fold-ing the fabric, improved wicking. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.6 Each sag sample was attached to the stand so that the fabric was straight and smooth.400 g were added to the top surface, and the resulting sag was measured and comparedwith the baseline sample. Results are shown in Figure 4.7. . . . . . . . . . . . . . . . 41
4.7 Origami-inspired patterns were sewn into the fabric and then tested for sag perfor-mance. Added structure was shown to decrease the sag by more than 50 percent. . . . . 41
vii

NOMENCLATURE
Do Outer diameter of the triangulated cylinderDi Folded-state inner diameter of the triangulated cylinderδ Deployment angle of a single triangulated cylinder storyh Deployed height of a single triangulated cylinder storyn Number of tessellated sides of the triangulated cylinderw Dimensionless strain energy for a triangulated cylinder
viii

CHAPTER 1. INTRODUCTION
The ancient art of paper folding is finding new life as people begin to explore the artistic,
architectural, and analytical depths of origami. Origami is being used in a wide range of applica-
tions, including morphing structures [1, 2], medical applications [3–6], space applications [7–9],
shopping bags [10], airbags [11], pop-up books [12], and robotics [13,14]. Mathematical methods
and models are being developed to describe the construction of increasingly complex origami de-
signs [15, 16], the motion of deployable origami [17], and thickness accommodation [9, 18, 19] as
patterns are translated to non-paper materials.
Tessellation origami is one branch of origami that shows promise in engineering design and
is comprised of a fold pattern repeated across a medium. These fold patterns do not overlap and
are not separated by gaps. Tessellation origami may be deployable or static and may be used for
architectural and artistic purposes [20, 21].
Some tessellations must be rigid-foldable for deployment or structural purposes. Rigid-
foldability requires that the mechanism can move between deployed and compact states without
twisting or stretching the panels between creases [22–24]. The origami may not self-intersect,
meaning that no more than one panel can occupy any given space at any given time [25]. Non-rigid-
foldable origami must also not be self-intersecting, but the panels may twist or stretch between
creases during motion. Non-rigid-foldable origami is challenging to integrate into a design due to
the deflection in panels and elongation of creases during motion. This type of behavior is difficult
to analyze in order to predict failure modes using the current available methods.
Applying engineering principles to tessellation origami-based designs enables the control
of certain design properties, such as flexibility, bending stiffness, mechanical advantage, shape
conformance, and deployment motion. The ability to control these and other properties will enable
augmented design capabilities in environments which currently limit the design to specific mate-
rials, including space, medicine, harsh environments, and scaled environments (such as MEMS
1

Origami Tessellations
Rigid-Foldable Non-Rigid-Foldable
Shape-Maintaining
MaterialsSoft Materials
Poisson’s
Ratio
Triangulated
Cylinder
Shape
Conformance
Mechanical
Advantage StabilityWicking,
Structure
Deployability
Other Mechanics
Figure 1.1: Flow chart illustrating the types of deployability and other mechanics of origami ad-dressed in this work.
applications). Other applications will be able to achieve more complex motions or better satisfy
design and performance requirements.
This research explores tailoring deployable origami tessellations in engineering design for
predictable and desirable performance in rigid-foldable and non-rigid-foldable applications. As
this is a broad and developing field, this thesis addresses augmented design capabilities from three
objectives, graphically illustrated in Figure 1.1.
First, a method to determine Poisson’s ratio for deployable, rigid-foldable tessellation
origami patterns is presented. This method increases the understanding of a pattern’s motion at
any point in the deployment. This method is expanded to include the calculation of mechanical
advantage. Having the capability to calculate Poisson’s ratio and mechanical advantage throughout
the deployment process will enable the selection and tailoring of patterns based on desired deploy-
ment behaviors. This work was published in the proceedings of the International Association for
Shell and Spatial Structures conference in 2016 [26].
Second, parameters defining the deployment motion and stability of the non-rigid-foldable
triangulated cylinder pattern are discussed. These parameters help predict the motion and behavior
of the pattern and outline modifications to obtain the desired behaviors. These behaviors include
2

obtaining a maximum deployed height, always returning to a closed position, or remaining in either
the open or closed configurations.
Last, a method to decrease sag and improve performance of adult diapers is outlined. These
origami tessellations are implemented in soft materials. Application of this method has the poten-
tial to improve the lives of many people coping with incontinence on a daily basis. This work has
been submitted for review in the 7th International Meeting on Origami in Science, Mathematics
and Education (7OSME).
3

CHAPTER 2. METHOD FOR CUSTOMIZING DEPLOYMENT MOTION THROUGHMODIFYING POISSONS RATIO
2.1 Introduction
Applying engineering principles to origami-based mechanical systems enables the control
of certain properties, such as flexibility, bending stiffness, and deployment motion. Determining
Poisson’s ratio for deployable, rigid-foldable tessellation origami patterns provides a method to
optimize the deployment motion of deployable structures and mechanisms that incorporate such
patterns. Rigid-foldability requires that the mechanism can move between deployed and compact
states without twisting or stretching the panels between creases [22]. Mathematically modelling
Poisson’s ratio for these patterns enables engineers to select and modify tessellation fold patterns
based on their potential behavior relative to engineering needs. This chapter presents and discusses
a method for calculating Poisson’s ratio in terms of degree-of-deployment and is demonstrated for
five origami tessellations. Modifications of the unit cell geometry of the tessellation are discussed
and illustrate a method of tailoring patterns to obtain the desired deployment motion. Application
of the mathematical models is also discussed.
By using origami principles, it becomes possible to control certain design properties, such
as the flexibility or bending stiffness. Materials can be folded into compact structures or expanded
over larger areas. Deployment motion can be controlled using origami techniques and material
properties [3,27]. Current examples of origami applications are found in deployable structures and
devices [1, 2, 10, 11, 28, 29], medical stints [3, 4], and energy absorption mechanics [5, 30], among
other applications [6,12,31,32]. Tessellation origami is one branch of origami that shows promise
in engineering design and is comprised of a fold pattern repeated across a medium. These fold
patterns do not overlap and are not separated by gaps. Tessellation origami may be deployable or
static, that may be used for architectural and artistic purposes [21]. Deployability of tessellation
origami is facilitated by making it rigid-foldable. Rigid-foldability requires that the mechanism
4

can move between deployed and compact states without twisting or stretching the panels between
creases [22–24]. The origami must not be self-intersecting, meaning that no more than one panel
can occupy any given space at any given time [25]. The fold pattern defines the motion of the
structure and should be understood when selecting a fold pattern for a deployable application.
One method to understanding the motion for deployable origami tessellation is to characterize the
motion using Poisson’s ratio. Poisson’s ration is defined as the negative ratio of the fraction of
expansion over the fraction of compression [33]:
νwl =−dw/wdl/l
(2.1)
Some materials and material constructions, including tessellation origami, exhibit negative Pois-
son’s ratios. These materials, classified as auxetics, expand instead of contract when stretched in
a transverse direction. Such behavior is useful for applications such as deployable structures and
energy absorption mechanics. This chapter analyzes the relationship between Poisson’s ratio and
fold patterns for five origami tessellation unit cells. The demonstrated relationship can be estab-
lished for other rigid-foldable tessellation patterns, enabling the prediction of Poisson’s ratio for a
range of fold patterns.
2.2 Related work in tessellations
The potential advantages of a selectable Poisson’s ratio in a material have inspired several
related investigations of origami. An experimental study of several different tessellations with aux-
etic behavior was conducted by Findley [34]. These patterns, studied for their properties when used
as cores in sandwich panels, include the Chevron (also called the Miura-Ori), Water Bomb, Square
Twist, and Honeycomb patterns. Poisson’s ratio was experimentally estimated for the purpose of
validating other material properties. Virk et al. [35] conducted a similar experimental analysis of
cellular structures manufactured using origami techniques but focused on structures that exhibited
negative or zero stiffness and a Poisson’s ratio of approximately zero. Lv et al. [36] found that
both the Miura-Ori and a Ron Resch pattern exhibited interesting variations in their Poisson’s ra-
tios during a load-bearing study. This led them to consider a method for determining the energy
stored in a loaded tessellation. Similar analytical results focused on Poisson’s ratio behavior in
5

folded, textured sheets, such as the Miura-Ori or Eggbox patterns, and are discussed by Schenk
and Guest [37]. The authors discussed the influence of crease pattern arrangements on the stiff-
ness of the model in different modes of folding. The work of You and Kuribayashi [38] reviewed
medical applications of tubular tessellations that can be made to expand transversely as they are
actuated longitudinally. Miura and Tachi [39] analyzed the synthesis of rigid-foldable cylindrical
cellular polyhedral structures made of origami tessellation patterned panels, and focused on opti-
mum tessellation geometry for foldability. Norman et al. [40] analyzed the morphing of curved
corrugated shells at multiple stages of deflection and covered the changes in curvature and induced
stresses. Lang [20] performed extensive research on twists, tilings, and tessellations, defining the
models that determine deployability and methods for obtaining a desired shape. Wei et al. [33] an-
alyzed Poisson’s ratio for the Miura-Ori in his research of materials and structures yielded unusual
emergent properties, such as a negative Poisson’s ratio. That work was used to confirm the method
of calculating the Poisson’s ratio for other tessellations. Dureisseix [41] analyzed the motion of the
panels of the Miura-Ori, and created an isostatic mechanism equivalent modeling the folding and
unfolding of the pattern. Marko Jovanovic [42] discussed the mathematical model of the motion of
the Triangular Waterbomb Base for architectural design to control the quantity of light in a build-
ing by opening and closing segments of the tessellation. Mathematical models of the tessellation
provided the same results as steps of the mathematical models discussed in this chapter, but did
not include the calculation for Poisson’s Ratio of this pattern.
2.3 Methods
The method used to determine Poisson’s Ratio is illustrated using the Waterbomb base
tessellation. First the selected tessellation pattern was reduced to a unit cell, which is the smallest
non-repeating fold pattern occurring in the tessellation. For the Waterbomb base tessellation, the
unit cell is a single Waterbomb base (see Figure 2.1). Length and width of an expanding and
collapsing structure is properly defined by corner points, rather than edges. It is critical that the
lines created by these points are perpendicular regardless of the stage of deployment. Three to
four points must be selected: two points define the length and two points define the width. If only
three points are selected, one point is used in both length and width. Constant geometric lengths
and angles and a single independent variable, called the deployment angle, are used to calculate
6

Poisson’s ratio. The deployment angle is the angle used to define the degree of deployment. In this
example, the deployment angle is θ , which is the angle at the “crown” of the fold (see Figure 2.1).
α
ℓ
W = L
R
θ
Figure 2.1: Square Waterbomb Base unit cell, Left: unit cell dimensions, Right: partially deployedunit cell with deployment angle.
Variable R is defined as the distance between opposing corners, and L is defined as the
length of the side of one square in the pattern. R is defined,
R =2lsin(θ
2 )
sin(α)(2.2)
and is used to calculate W and L. As the Waterbomb Base is a square, W = L, and
W = L =
√2
2R =
√2lsin(θ
2 )
sin(α). (2.3)
Because w = l and dw = dl, Poisson’s Ratio for the Waterbomb Base tessellation is ν =−1. The
remaining origami tessellations were analyzed using the same process.
7

2.4 Discussion
2.4.1 Miura-Ori
Poisson’s ratio of the traditional Miura-Ori tessellation unit cell was calculated by Z. Y.
Wei [33]. It is recalculated here to confirm the method used to calculate Poisson’s ratio. Once
the basic Poisson’s ratio equation was validated, the Miura-Ori geometry was modified. These
modifications were analyzed to determine how modifications of geometry affect Poisson’s ratio.
The length and width of the unit cell were defined as shown in Figure 2.2. The deployment angle
θ is shown in the partially deployed unit cell of Figure 2.2. Other important variables include l,
which defines the length of the slanted creases, and α , which defines the angle between the slanted
and straight creases (both shown in Figure 2.2). Each section of the unit cell is symmetrical to the
other sections of the unit cell. Poisson’s Ratio for the unit cell of the Miura-Ori tessellation is
ν = 1− (sin(α)sin(θ
2))−2 (2.4)
This equation is valid for 0 ≤ θ ≤ 180 degrees. When graphed against the deployment angle θ ,
Poisson’s ratio appears as shown in Figure 2.2. As the deployment angle approaches θ degrees, the
Miura-Ori unit cell is nearing complete closure on itself. As θ approaches 180 degrees, the unit cell
approaches being completely deployed and flat. It may be observed that for symmetrical values of
l, the length of the slanted creases does not affect the motion of the deploying unit cell. l may be
varied as needed to meet the geometric requirements of the specific design project. Conversely, α
has a direct impact on the deployment motion and Poisson’s ratio. The graph in Figure 2.2 shows
the variation of Poisson’s ratio as α is increased or decreased. Poisson’s ratio can be modeled as a
logarithmic function of the form
y = 10slope(ln(θ))+β (2.5)
where β is a function of α , and is the y-intercept of the linear line.
8

αL
W
ℓ
L
W
θ
100
101
102
Deployment Angle (Degrees)
-104
-102
-100
Po
isso
n R
atio
= 45
= 35
= 55
Figure 2.2: Miura-Ori unit cell, Left: unit cell dimensions, Center: partially deployed unit cellwith deployment angle, Right: Poisson’s ratio as a function of deployment angle.
Sink Miura-Ori
The Sink Miura-Ori, a variation on the Miura pattern, was also analyzed. The unit cell has
additional folds, called “sink folds” that are recessed into the traditional fold. The additional folds
reduce the height of the Miura-Ori without changing the deployment motion. The limiting depth of
the sink folds is one third of the original Miura-Ori height. The intersection points of the folds are
critical in the functionality of the sink Miura-Ori. As shown in Figure 2.3 A, sink fold creases must
cross the traditional fold lines at either one-half or one-third points for the tessellation to come to
a complete close.
Non-symmetrical Miura-Ori
Changes can be made to the Miura-Ori that would produce a non-symmetrical unit fold.
For the purpose of this discussion, each length and angle has been given a variable name, as shown
in Figure 2.3 B-G. The three possible cases for these modifications are l1 6= l2, l3 = l4; l1 = l2, l3 6=
l4;andl1 6= l2, l3 6= l4. Within each of these cases, α can be modified independently of the lengths.
Case 1 (l1 6= l2, l3 = l4): When l1 < l2, the deployment of the Miura-Ori is limited by l1. The smaller
side (always denoted as l1) follows the same movement previously discussed in the traditional
Miura-Ori unit cell. However, the larger side, l2, has a limited range of motion. In the non-
symmetrical version, the deployment angle θ is divided into two angles: the angle between the
vertical and the panel defined by l1, and the angle between the vertical and the panel defined
9

α α2
α1
ℓ2
ℓ3
ℓ1
ℓ4
α1
α2
α1
α2
α2
α4
α1
α3
ℓ4
α2
α4
α1
α3
ℓ3
ℓ4
ℓ2
ℓ3
ℓ4
ℓ3
ℓ4
ℓ3
ℓ4
ℓ3
ℓ2
ℓ1
ℓ1
ℓ1 ℓ
2
ℓ2
ℓ1 ℓ
2ℓ
1
A B C
D E F G
Figure 2.3: A:Sink Miura-Ori unit cell, B: traditional Miura-Ori, C: Case 1 (l1 6= l2, l3 = l4), D andE: Case 2 (l1 = l2, l3 6= l4), F and G: Case 3 (l1 6= l2, l3 6= l4).
by l2. θ1 becomes the deployment angle. Due to the limiting motion of the non-symmetrical
sides, the entire unit cell, and therefore the entire tessellation, will never completely compact.
The motion of the unit cell is constrained to 0 ≤ θ1 ≤ 90. As θ1 approaches 0 degrees, Poisson’s
ratio asymptotically approaches infinity, signifying that the smaller side of the unit cell is nearing a
completely vertical position. Due to this limited range of motion, another relationship for Poisson’s
ratio is required that accounts for the full range of motion of the smaller side and the partial range
of motion of the larger side, and is:
ν =−(1− (sin(α1)sin(θ1))
2)(l1sin(α1)cos(θ1)+l21sin2(α1)sin(θ1)cos(θ1)√
l22−l2
1(1−(sin(α1)sin(θ1))2))
sin2(α1)sin(θ1)cos(θ1)(l1sin(α1)cos(θ1)+l21sin2(α1)sin(θ1)cos(θ1)√
l22−l2
1(1−(sin(α1)sin(θ1))2))
(2.6)
Poisson’s ratio for 0 ≤ θ1 ≤ 90 and modifications to α are shown in Figure 2.4. Changes in α1
produce the same type of changes to the movement of the unit cell and Poisson’s ratio as seen
in the symmetrical unit cell. Increases in α1 create an initially faster deployment followed by a
10

much slower deployment. This modification would work well for deliberate hard-stops in a semi-
collapsible structure. The smaller portions of the unit cell geometry could be designed to control
the motion and contain it within a desired range. One column of non-symmetrical unit cells can
drastically restrict the movement of the whole system. Additional non-symmetrical columns allows
greater movement.
100
101
Deployment Angle (Degrees)
-103
-102
-101
-100
Pois
son R
atio
1 = 20
1 = 10
1 = 30
1 = 40
Figure 2.4: Poisson’s ratio of Case 1 (l1 6= l2, l3 = l4) as a function of deployment angle.
Case 2 (l1 = l2, l3 6= l4): In the case where l3 6= l4, the unsymmetrical geometry does not affect
the range of motion of the tessellation; it may completely deploy and compact. However, the
modified dimensions create curvature in both the unit cell and tessellation. This modification is
advantageous because lengths may be modified to wrap around entire or partial objects in the
compacted state, while retaining the same motion as the traditional Miura-Ori during deployment.
Like the symmetrical Miura-Ori, the deployed state is completely flat. Lengths l3 and l4 of adjacent
rows of unit cells need not be symmetrical nor equal to maintain traditional Miura-Ori deployment
motion. This geometrical modification allows for a deployable surface that conforms to varying
curvature.
11

Case 3 (l1 6= l2, l3 6= l4): Modifying lengths in both directions creates both hard-stops and curvature.
The limiting factors to the motion of the unit cell and tessellation are the smallest lengths in the
width direction.
2.4.2 Barreto’s Mars
Poisson’s ratio for the Barreto’s Mars unit cell was calculated by Evans et al. [25]. Their
analysis defined the relative motion of four planes defined by four creases. The dotted black lines
in Figure 2.5 show that three of the creases must be of the same crease assignment (either all
mountain creases, or all valley creases). The fourth and last crease, designated by a solid black
line, must be of the opposite assignment as the other three. The α angles define the angle of
the folds in the material, and the θ angles define the angles between the planes. The work was
performed for a unit circle, but the theory is readily applied to the unit cell of the Barreto’s Mars
by applying appropriate lengths to each of the crease vectors.
α1
α3
α2
α4
L
Wθ1
θ2
θ3
θ4
θ1180-θ
2θ
3
θ4
0 50 100 150
Deployment Angle 1 (Degrees)
-103
-102
-101
-100
-10-1
Po
isso
n R
atio
1 = 110,
2 = 40
1 = 130,
2 = 40
1 = 101,
2 = 40
1 = 110,
2 = 25
1 = 110,
2 = 45
Figure 2.5: Barreto’s Mars unit cell, Left: unit cell with dimensions, Center: partially deployedunit cell with deployment angle, Right: Poisson’s ratio as a function of the deployment angle.
Figure 2.5 shows the definition of the variables. The deployment angle for this unit cell
is θ1, the angle between sector 1 and sector 4, and is shown in Figure 2.5. All calculations were
made with the assumption that sector 4 was fixed. The calculations illustrated that Poisson’s ratio
12

for the Barreto’s Mars unit cell is
ν =− (x+ y+ z)
w32 ( dx
dθ1+ dy
dθ1+ dz
dθ1)[(2cos(θ1)sin(α1)+ sin(α4))(sin(θ1)sin(α1))
+2(sin(θ1)sin(α1))(−cos(θ1)sin(α1))]
(2.7)
where
x = (cos(α2)cos(α1)− sin(α2)sin(α1)cos(2tan−1(µtan(θ1
2)))−1)2 (2.8)
y =(cos(α2)cos(θ1)sin(α1)+ sin(α2)cos(α1)cos(θ1)cos(2tan−1(µ))
+ sin(α2)cos(θ1)sin(2tan−1(µ)))2(2.9)
z =(sin(θ1)cos(α2)sin(α1)+ sin(α2)cos(α1)sin(θ1)cos(2tan−1(µ))
+ sin(α2)cos(θ1)sin(2tan−1(µ)))2(2.10)
w = sqrt(cos(α1)− cos(α4))2 +(cos(θ1)sin(α1)+ sin(α4))
2 +(sin(θ1)sin(α1))2 (2.11)
µ =sin(1
2(α1 +α2))
sin(12(α1−α2)
tan(θ1
2) (2.12)
Because the Barreto’s Mars deployment angle is defined as the outside of the two planes, the
angular positions for the deployed and compacted positions are opposite that found for the Miura-
Ori. This means that as θ1 approaches 0 degrees, the unit cell approaches complete deployment (see
Figure 2.5), and approaches complete compaction as θ1 approaches 180 degrees. The complexity
of the equation finds its root in the complexity of the motion of the unit cell. The unit cell rotates
and collapses upon itself so that some planes are resting on and overlapping other planes. The
sector angles α1 and α2 can be changed independently of each other, while α3 and α4 are dependent
on the first two angles (α3 = 180−α1 and α4 = 180−α2). When α1 = 110 degrees, Poisson’s
ratio is at its smallest value for this unit cell. If α1 is increased or decreased, Poisson’s ratio is
dramatically increased as the deployment angle θ1 approaches 180 degrees. Due to geometric
constraints, 100≤ α1 ≤ 140 degrees. Figure 2.5 compares two modified α1 values to the original
α1. Changes in α2 also produce changes in Poisson’s ratio, as shown in Figure 2.5. A decrease in
α2 produces a decrease in Poisson’s ratio, and vice versa. α2 is limited to 1 < α2 ≤ 50 degrees.
13

Changes to α2 are more dominant than changes to α1. Changes to both α1 and α2 can be optimized
to obtain either required limitation of motion or desired rate of closure.
2.4.3 Rectangular Waterbomb base
The calculations for Poisson’s ratio for a square Waterbomb Base were discussed above in
the Methodology section. Modifying s so that l 6= w creates a rectangular unit cell. This geometry
confines θ to a smaller range of motion, controlled by the difference between the lengths of l
and w. The closer l and w are in length, the larger the range of motion. Poisson’s ratio remains
unchanged with the geometry change.
2.4.4 Triangular Waterbomb base
The Triangular Waterbomb Base has an equilateral triangle as its unit cell. The creases
bisect each angle and edge. The length of the unit cell is defined as a tip of the triangle to the
opposing side of the triangle. The width is the distance between the remaining two tips of the
triangle. The deployment angle θ is defined as the angle between one of the three rising creases
and a flat surface, and operates between 0 and 30 degrees (see Figure 2.6). Poisson’s ratio for this
unit cell is defined as
ν =−tan(θ)2l√
3cos(θ)+ l√
3
√2cos(2θ)−1
2l√3sin(θ)+ 2sin(2θ)√
2cos(2θ)−1
(2.13)
The unit cell and tessellation are completely deployed when θ = 0 degrees, and completely com-
pacted when θ = 30 degrees. Modifications from an equilateral triangular unit cell to an isosceles
triangle limits the range of deployable motion in a manner similar to the modified Miura-Ori. Mod-
ification of the unit cell to a non-symmetrical, non-equilateral triangle yields maximum movement
restriction.
2.4.5 Rigid foldable brick wall
The crease assignment of the Square-Twist-based “Brick Wall” tessellation was reassigned
to be rigid-foldable. In this crease pattern, three creases were reversed from mountain fold to valley
14

α
W
L
ℓθ
0 10 20 30
Deployment Angle (Degrees)
-0.4
-0.3
-0.2
-0.1
0
Po
isso
ns R
atio
Figure 2.6: Triangular waterbomb base unit cell, Left: unit cell dimensions, Center: partiallydeployed unit cell with deployment angle, Right: Poisson’s ratio as a function of deploymentangle.
fold or vice versa, and are marked in gray in Figure 2.7. The deployment angle, θ , is shown in Fig-
ure 2.7 as the angle between the rectangular planes defined by b and c and the trapezoidal planes.
Due to geometry and deployment motion, it was assumed that θ in each of the four instances was
equivalent. Poisson’s ratio for the Modified Brick Wall tessellation unit cell is
ν =−b+2acos(θ)
b+ c+2acos(θ)(2.14)
Simple modifications to the geometry can be made by changing lengths b and c. Sector angle
modifications have a greater impact on the motion of the unit cell, and even small changes may
prevent the tessellation from deploying entirely.
L
W
a b c
θ
0 50 100 150 200
Deployment Angle (Degrees)
-12
-10
-8
-6
-4
-2
Pois
son R
atio
Figure 2.7: Modified brick wall unit cell, Left: unit cell dimensions, Center: partially deployedunit cell with deployment angle, Right: Poisson’s ratio as a function of the deployment angle.
15

2.5 Application to mechanical advantage
Mechanical advantage is the ratio of output force to input force and is often calculated
as velocity in over velocity out. Poisson’s ratio can be used to calculate the mechanical advan-
tage and would be helpful in the design of deployable structures. The numerator is the time-
dependent derivative of the equation defining the width of the unit cell. The denominator is the
time-dependent derivative of the equation defining the length of the unit cell. Through algebraic
manipulation, mechanical advantage can be defined by the derivative of length and width with re-
spect to the deployment angle. The Square Waterbomb Base unit cell has a mechanical advantage
of 1, while the remaining four unit cells yield variable mechanical advantages, as shown in Fig-
ure 2.8. Once the mechanical advantage of a particular tessellation pattern is known, the knowledge
may be used to maximize deployment function and motion.
0 50 100 150
Deployment Angle (Degrees)
0
5
10
15
20
Mechanic
al A
dvanta
ge
0 50 100 150 200
Deployment Angle (Degrees)
0
5
10
15
20
Mechanic
al A
dvanta
ge
0 5 10 15 20 25 30
Deployment Angle (Degrees)
0
0.1
0.2
0.3
0.4
Mechanic
al A
dvanta
ge
0 50 100 150 200
Deployment Angle (Degrees)
0
1
2
3
4
5
6
Mechanic
al A
dvanta
ge
Figure 2.8: Mechanical advantage as a function of deployment angle. Top row, left to right: Miura-Ori, Barreto’s Mars, Bottom row, left to right, Triangular Waterbomb base, and Modified Brick.
16

2.6 Conclusion
As shown by the Miura-Ori, Barreto’s Mars, Modified Brick, Triangular and Square Wa-
terbomb Bases, tessellation origami is a single-constraint system, characterize-able by the deploy-
ment angle. Using this angle, Poisson’s ratio has been calculated for each of these fold patterns.
The method used to calculate Poisson’s ratio for these tessellations may be readily applied to other
origami tessellations to increase the understanding of the deployment motion. The modification of
lengths and angles in a fold pattern enable origami tessellations to be tailored to fit desired deploy-
ment motion. As has been shown through the unit cell patterns discussed above, some patterns
are more adaptable than others. By understanding the deployment motion through Poisson’s ra-
tio, origami tessellations may be selected to resolve design limitations in engineering applications.
Mechanical advantage can be used to improve the design for specific applications. Applications
of origami tessellations include deployable structures and material-specific designs used in space,
medical, and corrosive-environment applications. Origami tessellations also have the ability to be
scaled in both directions to meet specific size requirements without changing the motion of the
pattern. Additionally, tessellations can be modeled using paper, an inexpensive prototyping mate-
rial, before being applied to more expensive materials. Mathematical analysis of the tessellation
options will reduce the cost of both time and money in the designing process.
17

CHAPTER 3. STABILITY TRANSITION RATIO OF THE TRIANGULATEDCYLINDER
3.1 Introduction
This chapter explores the independent variables necessary for designing a triangulated
cylinder pattern to achieve either monostable or bistable behavior. Bistable behavior allows the
pattern to either remain open or closed, and monostable behavior causes the pattern to return to its
closed position. The Stability Transition Ratio (STR) mathematically defines the diametric ratio
when the pattern changes from monostable to bistable behavior and is dependent on the number of
sides. The strain energy is dependent on the STR and the number of sides. The maximum deploy-
ment height is obtained when the triangulated cylinder pattern has eight sides. These findings will
help predict the motion and behavior of a pattern and enable designers to understand how to mod-
ify the pattern to meet the needs of specific applications. These applications include extendable
antenae, support for catheters and other medical equipment, bellows, and cylindrical shields.
The triangulated cylinder origami pattern (sometimes referred to as the Kresling pattern)
folds to create an origami tube as shown in Figure 3.1. This tube compresses axially with a chang-
ing inner diameter and constant outer diameter. This pattern has been used in various applications,
including sunshields for space telescopes [8], bellows for martian spacecraft [43], debris barriers
for asteroid drilling [44], and cylindrical air filters [45].
This triangulated cylinder pattern was observed by fixing a cylinder of paper on both ends
and rotating the cylinder about the axis while adding a compressive load [46]. Hunt and Ario [47]
used this method to study the post-buckling effects of the triangulated cylinder pattern. Guest and
Pelligrino [48–50] studied the folding of these cylinders using geometric, physical, and computer
models. They discovered that the force to fold the pattern and the strain in the pattern decreases as
the number of sides (n) increases.
18

(a) n-sided 2-story triangulated cylinder pat-tern with defining parameters
(b) 6-sided triangulated cylinder patternfolded into a single story
Figure 3.1: Triangulated cylinder pattern.
Recent investigation has shown that the edge dimensions of a flat-folded triangulated cylin-
der pattern, a, b, and co (see Figure 3.1), are defined by three variables, which are the specified
outer diameter (Do), folded-state inner diameter (Di), and the number of tessellated sides in the
pattern (n). The edge dimensions are determined by [43] as
a = Do sin(φ) (3.1)
b = Do sin(
cos−1(
Di
Do
)−φ
)(3.2)
co = Do sin(
φ + sin−1(
bDo
))(3.3)
where
φ =π
n(3.4)
The triangulated cylinder pattern is not rigid-foldable, meaning it experiences strain and defor-
mation in the creases and panels during actuation. This type of behavior is difficult to analyze
using the current available methods. Simplified models have been developed to facilitate analysis
of the strain in the pattern. Cai et al. [51] assumes that the majority of this strain occurs only in
the creases, and that it may be approximated as elongation in crease c only, with the simplifying
assumptions that a and b are completely rigid and that the pattern begins in a completely com-
19

pressed state and actuates to a deployed state. The length of c during actuation as a function of the
deployment angle δ (see Figure 3.1b) is given by:
c(δ ) =
√(Do sin
(φ + sin−1
(bcos(δ )
Do
)))2
+(bsin(δ ))2 (3.5)
while the dimensionless strain energy is given by:
w(δ ) =12
(c(δ )− co
co
)2
(3.6)
Yasuda et al. [52] examined the force-displacement relationship of a single unit cell of the
triangulated cylinder pattern by studying the energy of the creases during actuation. Like Cai et al.
Yasuda et al. simplified the model by removing the side facets and modeling the strain only in the
creases. They modeled lengths b and c as linear springs, and a as a fixed length.
Both Cai et al. and Yasuda et al. found that the patterns exhibit bistable behavior when
specific criteria are met. The model developed by Cai et al. predicted bistability for an n= 6 model,
and Yasuda et al. noted that the bistable behavior depended on the height of the deployed model.
Bistability yields a stable position in both the deployed and stowed states. The dimensionless
strain energy curve from [51] provides a way to mathematically determine if a pattern is bistable.
If the strain energy curve has a local maximum, then the corresponding pattern is bistable. If the
strain energy curve has no local maximum, that pattern is monostable. The strain energy curves
are shown in Figure 3.2 for both bistable and monostable patterns.
This chapter explores the independent variables necessary for designing a triangulated
cylinder pattern for either monostable or bistable behavior. This will help predict the motion and
behavior of a pattern and enable designers to understand how to modify the pattern to meet the
needs of specific applications.
3.2 Methods
The first step was to validate the assumption that the strain of the pattern may be modeled
by linear springs at the creases only. A parametric finite element analysis (FEA) model was de-
veloped in ANSYS APDL for the triangulated cylinder of any arbitrary n. The model includes the
20

0 0.5 1 1.5 20
0.002
0.004
0.006
0.008
0.01
δ (radians)
Dimensionless Strain Energy (ω)
Local Maximum
Figure 3.2: Comparison of various triangulated cylinder patterns with n = 6 and a fixed outerdiameter of 50 mm. The inner diameter was varied to obtain different diametric ratios.The solidline indicates a pattern with monostability and the other plots indicate patterns with various bistablebehaviors.
panels, and builds the pattern in a folded state. The model is then deployed to a specified height
through displacement loads. The height of the pattern is defined by the length of crease b and the
deployment angle δ . The specified height used in the ANSYS model was hmax = bsin(π
6 ).
This model showed that for any n, the strain occurred predominately at the creases, with
negligible strain in the panels. As n increases for a given Do and Di, some strain is distributed to the
panels. It was assumed that the strain in the panels was minimal enough to model the strain of the
pattern as linear springs at the creases. The strain in crease c was more than twice the magnitude of
the strain in crease b, and was concluded to be the governing strain in the system. These results are
illustrated in Figure 3.3, with one example model, showing n = 6 with Do = 50 mm and Di = 22.5
mm. Consistent results were obtained when analyzing models of varying n.
With this verification, it was determined that the assumptions to approximate strain as
elongation in c only, as proposed by Cai et al. [51], would be used to develop a model that would
predict when a triangulated cylinder pattern would transition from monostable behavior to bistable
behavior. This model has limitations inherent to simplifications of physical behavior, but with the
FEA validation, it is assumed that the model is sufficiently accurate for design purposes.
21

Figure 3.3: The strain results from an ANSYS APDL triangulated cylinder model (n = 6, Do = 50mm, and Di = 22.5 mm) after deployment from the stowed to the deployed state, showing strain increases b and c and negligible strain in the panels. The maximum strain occurs in c at the top andbottom segments of the crease, and is more than twice the strain exhibited in b. From this it maybe assumed that the strain in c governs the strain of the system.
Using these assumptions, bistability can be predicted by the strain energy equation (Equa-
tion 3.6), which is a function of c(δ ) and co. Both c(δ ) and co are defined by Do, Di, n, and b.
The length of b, as shown in Equation 3.2, is governed by Do, Di, and n. Therefore, the design
variables of interest for determining the stability of a triangulated cylinder pattern are Do, Di, and
n.
For bistable patterns of any dimension, a local maximum is present in the strain energy
curve in the first π
2 rad of deployment. As the pattern can only physically deploy up to that point,
δ = [0, π
2 ] is the interval of interest. If a pattern is monostable, there is no local maximum. The
point where a pattern transitions from bistable behavior to monostable behavior (i.e. the point
where the local maximum disappears) will be termed the stability transition point. To determine
the stability transition point, Do and n were held constant while Di was systematically varied. The
initial Di was selected to yield a bistable pattern and then increased until a monostable pattern was
obtained. Preliminary analysis determined that if the initial Di is zero, the strain energy curve will
always predict bistable behavior.
22

0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55
0
0.5
1
1.5
2
2.5
3
x 10−3
Diametric Ratio (Di/D
o)
Str
ain
En
erg
y L
oca
l Ma
xim
um
Local Maximum
Curve Fit
Bistable
Behavior
STR
Monostable
Behavior
Figure 3.4: The strain energy local maximum approaches zero as the diametric ratio is increased.The curve fit enables the calculation of the Stability Transition Ratio (STR), which is the diametricratio for which all greater ratios are monostable and all lesser ratios are bistable.
The strain energy curve for each case was calculated and visualized. The location and
value of the local maximum for each curve was calculated and plotted in a separate graph, as
shown in Figure 3.4. A third-order polynomial curve was fit to the strain energy local maximum
as a function of the diametric ratio ( DiDo
) to determine when the local maximum reached zero. This
curve fit yielded an R2 value of 0.9999984. The diametric ratio at which the strain energy local
maximum becomes zero is defined here as the Stability Transition Ratio (STR). The process of
tracking and curve-fitting the local maximum of the strain energy curve for changing diametric
ratio was repeated for multiple values of Do and n.
It was hypothesized that, due to material properties of the materials used to make the tri-
angulated cylinder pattern, physical models would have a lower STR than the analytical model
predicted. The corresponding ratio can then be considered the effective STR for a given Do and
23

n. To confirm this hypothesis, a physical validation test was created. Polyethylene terephthalate
(PET) prototypes were created of 0.254 mm thickness, E = 0.69e9 Pa, Do = 60 mm, n = 6, and di-
ametric ratio = 0.4695, respectively. The Golden Section method was used to modify the predicted
STR until the effective STR was physically determined.
To minimize the effects of human variability in prototype construction, the triangulated
cylinder pattern was laser scored onto the PET sheet. PET film (0.0508 mm) with an adhesive
back was used in taping the seams in each prototype when the sheet was rolled into the cylindrical
pattern.
3.3 Results
The analytical model developed from the dimensionless strain energy equation yielded
results for n = 3 : 15, and Do = 10 : 100 mm. Table 3.1 shows a portion of these results, showing
the relationship between STR, Do, and n. It was observed that the STR was dependent on n, and
independent of Do. A curve fit was developed to enable the calculation of a mathematically definite
single real root of the phenomenon, but physically, this is only an approximate value.
Table 3.1: The stability transition ratio (STR) for various valuesof n and Do, showing a dependence on n and no dependence
on Do. The STR values for each n were equivalent to 13significant digits.
Do (mm)n 20 40 60 80 1003 0.241897 0.241897 0.241897 0.241897 0.2418974 0.358143 0.358143 0.358143 0.358143 0.3581435 0.425552 0.425552 0.425552 0.425552 0.4255526 0.469492 0.469492 0.469492 0.469492 0.4694927 0.499117 0.499117 0.499117 0.499117 0.4991178 0.519787 0.519787 0.519787 0.519787 0.5197879 0.614782 0.614782 0.614782 0.614782 0.61478210 0.663515 0.663515 0.663515 0.663515 0.66351511 0.703188 0.703188 0.703188 0.703188 0.70318812 0.740379 0.740379 0.740379 0.740379 0.74037913 0.771193 0.771193 0.771193 0.771193 0.77119314 0.798328 0.798328 0.798328 0.798328 0.79832815 0.823335 0.823335 0.823335 0.823335 0.823335
24

A correlation between the diametric ratio ( DiDo
) and n emerged by plotting the STR against
n, as shown in Figure 3.5. The shaded region shows where monostable behavior would be expected
and the unshaded region shows where bistable behavior would be expected. There are two distinct
trends for the STR as a function of n. The first trend occurs when 3≤ n≤ 8 and the second trend
occurs when 9 ≤ n ≤ 15. In both of these trends it is seen that the optimal ratio increases as an
exponential function of n.
f (n) = aebn + cedn (3.7)
The coeffecients with 95% confidence bounds for the first region are
a = 0.4418 (0.3554,0.5282) (3.8)
b = 0.02313 (0.001062,0.04519) (3.9)
c =−1.4 (−1.785,−1.014) (3.10)
d =−0.5989 (−0.7726,−0.4251) (3.11)
(3.12)
and the coeffecients with 95% confidence bounds for the second region are
a = 0.8704 (−0.0008856,1.742) (3.13)
b = 0.004652 (−0.037,0.04631) (3.14)
c =−1.262 (−1.419,−1.104) (3.15)
d =−0.1622 (−0.3702,0.04584) (3.16)
(3.17)
The curve fit equations approximate a physically discrete function with a theoretically con-
tinuous function and is valid for integer values for n. The changes in behavior between the two re-
gions could potentially be attributed to the simplifying assumptions made in developing the model.
25

0 5 10 15
n
0
0.2
0.4
0.6
0.8
1
ST
R
STR Values
Curve Fit
Monostable
Bistable
Figure 3.5: The Stability Transition Ratios for n= 3 : 15, with two exponential curve fits. The curvefit equations approximate physically discrete functions with a theoretically continuous function andshould only be used at integer values for n. The shaded region shows where monostable behaviorwould be expected and the unshaded region shows where bistable behavior would be expected.
Alternatively, the third order polynomial fit used to find the STR could also be attributing to the
discontinuity in predicted behavior. The results from additional mathematical and finite element
analysis in each of these areas remain inconclusive.
In calculating the STR, it should be noted that the local strain energy maximum reaches
a sufficiently small (essentially zero) value sooner than the analytical model shows. Additionally,
the strain energy analysis performed to determine the STR does not take into account the effect of
material properties. The analytical model may be used as a starting point for designing monostable
or bistable systems, but the accuracy of the model’s predictions are affected by the elasticity of the
material. From constructing prototypes from different materials, it was confirmed that materials
with a lower stiffness will have a higher tendency toward monostable behavior. The physical PET
prototype showed that while the calculated STR was 0.4695, the effective STR was closer to 0.32.
The effective STR will be affected by nonlinear and time dependent material properties (e.g. creep
26

and stress relaxation), manufacturing considerations such as crispness of the creases, the magnitude
of stress concentrations due to folding techniques, and the material perforation technique.
3.3.1 Additional Findings
During exploration of the analytical model, it was shown that the stowed length, co, is
independent of n and Do. It is only dependent on the diametric ratio. Substituting b (Equation 3.2)
into co (Equation 3.3) and simplifying yields
co = Do sin(
cos−1(
Di
Do
)). (3.18)
Using this simplified equation for co, the equation for c (Equation 3.5), and the strain energy
equation (Equation 3.6), the strain energy equation can be expressed in terms of Do, Di, and n as
w =12
(cco−1)2
(3.19)
w =12
√(
Do sin(
φ + sin−1(
bcos(δ )Do
)))2+(bsin(δ ))2
Do sin(
cos−1(
DiDo
)) −1
2
(3.20)
Through simplification and defining intermediate variables q1 and q2 as
q1 = sin(π
n+ cos−1(
Di
Do)− π
n)cos(δ )) (3.21)
and
q2 = sin(δ )sin(cos−1(Di
Do)− π
n) (3.22)
the strain energy equation simplifies to
w =12[
√q2
1 +q22
sin(cos−1( DiDo))−1]2. (3.23)
27

0 0.5 1 1.50
0.5
1
1.5
2
2.5
3x 10
−3
δ (radians)
Dim
en
sio
nle
ss S
tra
in E
ne
rgy
(ω)
n = 3
n = 5
n = 7
n = 9
Figure 3.6: The strain energy curves verses deployment angle, calculated from Equation 3.23.Example results using various n values are shown in the plot. The corresponding STR values foreach n were used as the diametric ratios.
This shows that the strain energy equation is dependent only on the diametric ratio and n. A
graphical representation of the strain energy curves, where the inputs are n and the corresponding
STRs, is shown in Figure 3.6.
Figure 3.6 shows that, for a given n and the corresponding STR, the model predicts that
some patterns will be able to deploy more before the strain in the pattern inhibits further actuation.
For some designs, maximum deployment height is desirable. Deployment height is a function of
δ , Di, Do, and n. For a set Do at the STR (therefore also defining Di), as n varies, so will the
height. As the maximum deployable angle varies based on n, there is an optimal n that will yield
the greatest deployment height.
From Equation 3.23, it was determined that a deployment angle could be determined for a
cutoff value of strain energy. A value of w = 2x10−3 was chosen, and the corresponding deploy-
ment angle was calculated for each value of n ≤ 15 and for a representative value of Do, as the
value of Do merely scales magnitude of the height and does not affect the trend. The angle was
28

0 5 10 15
n
0
5
10
15
Heig
ht (m
m)
Height
Curve Fit
Figure 3.7: The deployed height of patterns, using the STR and Do = 50 mm for n = 3 : 15. Themagnitude of deployment height is scaled by the value of Do, while the trends remains constant.The deployment height increases until n = 8, then decreases from n = 9 to n = 15.
then used in the height equation (h= bsin(δ )) to calculate the maximum deployable height. n≤ 15
was selected because triangulated cylinders with lower numbers of sides are more manufacturable.
The results are shown in Figure 3.7, which uses Do = 50 mm as an example outer diameter.
As shown in this figure, the deployment height increases until n = 8, which yields the maximum
deployment height. The height decreases from n = 9. It is interesting that the drastic change in
deployment height occurs at n = 8 and is consistent with that found for the STR as a function of n.
Further analysis has yet to provide conclusive explanations for this phenomenon.
The behavior of the two regions can be described with linear fits ( f (n) = ax+b), with the
first region having coefficients of
a = 1.805 (1.408,2.201) (3.24)
b = 0.3836 (−1.899,2.666) (3.25)
(3.26)
29

and the second region having coefficients of
a =−0.5749 (−0.5897,−0.5602) (3.27)
b = 17.84 (17.52,18.16) (3.28)
(3.29)
3.4 Conclusion
This chapter demonstrates that the mathematical point between monostable and bistable
behavior in triangulated cylinder patterns is defined by the diametric ratio ( DiDo
). The ratio at this
point is called the Stability Transition Ratio (STR), and is dependent only on the number of sides,
n. The STR can be approximated with an exponential function, shown in Equation 3.7. This
equation should only be used for discrete values of n. This approximation provides an excellent
starting point when designing for monostable or bistable behavior in triangulated cylinders. The
STR will be affected by the material used and the folding technique employed. The maximum
deployed height was shown to occur when n = 8, and the minimum height occurs when n≥ 32.
These findings will help predict the motion and behavior of triangulated cylinder patterns
and enable designers to understand how to modify the pattern to meet the needs of specific appli-
cations.
30

CHAPTER 4. EXPLORING FEASIBILITY OF ORIGAMI-INSPIRED INNOVATIONSFOR SHAPE CONFORMANCE, WICKING, AND STRUCTURE FOR IMPROVED ADULTDIAPERS
4.1 Introduction
This chapter explores the feasibility of implementing origami and origami-inspired de-
signs in adult diapers that reduce sag by improving shape conformance, wicking, and load-bearing
structure. Sag in adult diapers is caused by excess material from a poor fit, expansion of absorption
materials, and stretching of diaper materials during loading. Sag can be minimized by improving
fit, more evenly distributing fluid loads to minimize localized swelling, and enhancing the struc-
ture. Multiple origami patterns were evaluated and compared for shape conformance, wicking, and
load-bearing structure.
Incontinence is the partial or complete loss of control of either the urinary or bowel tracts. It
can affect people of all ages, but often affects aging people, women after childbirth and surgeries to
female organs, men with enlarged or surgically-removed prostates, people with mobility problems,
and people with physiological unawareness [53–55]. Incontinence poses many challenges and
complications for individuals, such as embarrassment, decreased socialization, and increased risk
of falling for elderly people hurrying to the facilities. Caretakers are burdened as some must lift
their patient to change soiled clothes or bedding to keep the patient’s skin healthy. Caretakers
with mobile patients must find and clean all soiled surfaces if incontinence solutions fail to contain
human waste.
Medical professionals, scientists, and engineers are working to develop and improve in-
continence technology and solutions. One such technology is the adult diaper. Adult diapers are
absorbent garments used to contain urine and fecal matter. Multiple brands offer varieties of fit
and performance capabilities. Some diapers are specifically designed for night use, some are uni-
sex, and some are specifically designed for either male or female anatomy. Some diapers closely
31

resemble panties while others have the more traditional diaper tabs. Absorption capabilities and
other diaper technologies have improved drastically, enabling people with incontinence to venture
more confidently into public settings.
One aspect that still presents challenges for diaper designers is sag. Sag can cause leakage,
physical discomfort, and embarrassment for the user or caretaker. Sag is caused by excess mate-
rial from a poor fit, expansion of absorption materials, and stretching of diaper materials during
loading. If designers can improve the fit, distribute fluid loads more evenly throughout the diaper
to minimize localized swelling, and enhance the load-bearing capabilities of the diaper structure,
sag can be diminished. Several innovative methods of reducing sag can be found in the application
and inspiration of origami.
Origami is traditionally the art of paper folding, but is rapidly expanding to include other
materials. Origami and origami-inspired designs are finding application in space [56,57], medicine
[3, 58], architecture and structure [1, 2, 59–61], safety equipment [45, 62], and robotics [58, 63–
65]. As advancements to the field of origami through mathematical means develop, increasingly
complex results are being obtained. Computer algorithms are being developed with the ability to
design origami shapes and surfaces previously thought to be impossible. If the elements important
to origami are adopted and modified to create simpler fabric patterns that behave in desirable and
predictable ways, origami can be used to make a deployable form-fitting structure that decreases
sag. The purpose of this chapter is to explore the feasibility of implementing origami and origami-
inspired designs to minimize sag in adult diapers. This chapter provides some basic experiments
and thoughts to set the foundation for future work.
Although sag reduction in adult diapers will be the focus of this chapter, the concepts
discussed may be expanded to other fields and technologies.
4.2 Shape Conformance
A major challenge in designing a well-fitting diaper is using flat materials to create a prod-
uct that conforms to the non-developable curved human surface. A developable surface is a sur-
face which can be unfolded into a plane without stretching or tearing and which preserves the
length of all curves on the surface throughout the unfolding process [66,67]. Designing for a non-
developable surface is complicated because the shape demands material stretch and deformation,
32

not just simple cuts and folds. In addition to being non-developable, the human shape also differs,
sometimes drastically, in size and curvature from person to person. Yet in industry, a finite number
of diaper designs and sizes are expected to accommodate a nearly infinite combination of sizes and
shapes. The current solution is to design for users in the upper end of each size bracket, which can
create a baggy fit for other users. The extra material causes sagging of the structure and increases
the chance of leaking when the diaper is soiled.
Superior performance may be obtained by improving shape conformance over a larger
range of sizes. Origami has the potential to be instrumental in improving shape conformance of
adult diapers in two ways. First, shape conformance can be improved by implementing origami
patterns that transform a flat medium into a curved surface or shape. Although not directly applied
to diapers, research has shown that origami has the benefit of being able to conform to almost
any arbitrary surface by modifying the patterns [68, 69]. Fabric origami can be used to closely
approximate non-developable surfaces because material-based patterns are malleable and adjust to
some surface bending and stretching. This flexibility enables better shape conformance, increases
overall comfort, and improves performance.
Secondly, deployable origami may be instrumental in improving shape conformance of
size. Deployable patterns would allow the product to dynamically evolve from a smaller, stowed
state, to a larger deployed state, drastically increasing the range of available sizes without sacrific-
ing fit or performance.These patterns would allow the diaper to more closely conform to human
shapes and sizes while minimizing the amount of baggy material in the design. In diapers, origami-
based deployability may be implemented by folding material such that controlled amounts of fabric
are released at different stages of deployment. Alternatively, origami-inspired patterns may be in-
troduced into the fabric through sewing, starching, gluing, weaving, or otherwise treating the fabric
to control the stretch behavior of the material.
Figure 4.1 illustrates three ways to implement a fan fold in an adult diaper. This illustration
can be easily extended to other patterns. The first method is to use the traditional fan pattern. This
pattern would yield more expansion at the top of the diaper and less expansion at the bottom. One
potential challenge this pattern presents would be accommodating the height of the fan folds. To
minimize the folded height, the fan pattern could be modified to include box pleats, as shown in
the middle of Figure 4.1. This variation on the fan pattern is significantly flatter, and has com-
33

Fan Fold Box Fan Fold Stitched Fan
Figure 4.1: Possible variations of the fan pattern for implementation in an adult diaper to improveshape conformance.
Figure 4.2: Each shape conformance sample was manually stretched over a non-developable sur-face. The distance along the surface between four sets of points was measured, and the percentstretch for each set was determined. The amount of stretch in each pattern represents a modified,conforming fit to a non-developable surface. Results are shown in Figure 4.3.
parable deployment capabilities. A third implementation method would be to develop a pattern
in an elastic material with the same behavior implemented through some other method, such as
stitching, as shown on the right in Figure 4.1. While the last method is admittedly an abstraction
of origami and origami deployability, it was considered because it would likely be the easiest to
implement in diaper manufacture with the current available technology. Using actual folds would
hold advantages in being able to jointly integrate the patterns discussed in Sections 4.3 and 4.4.
To illustrate the implementation of origami and origami-inspired patterns to improve shape
conformance, five samples were made out of a Rayon Spandex Slub Jersey knit fabric in a shape
that mimics the upper rear portion of a diaper. This material was chosen because it is similar to the
34

0 20 40 60 80 100
1
2
3
4
Percent Stretch
Lo
ca
tio
n
1
2
3
4
Stretch Locations
0 20 40 60 80 100
1
2
3
4
Percent Stretch
Lo
ca
tio
n
Fan Arc
0 20 40 60 80 100
1
2
3
4
Percent Stretch
Lo
ca
tio
n
0 20 40 60 80 100
1
2
3
4
Percent Stretch
Lo
ca
tio
n
Water-Bomb Miura
0 20 40 60 80 100
1
2
3
4
Percent Stretch
Lo
ca
tio
n
Plain
Figure 4.3: Shape conformance of selected origami-inspired patterns to a non-developable surfaceis illustrated, showing variable stretch at four different locations of the pattern, compared with thestretch of unaltered fabric. The distance between these points were normalized by the original, un-stretched lengths in each location. The stitched patterns were modified from the traditional origamipatterns to preserve deployment motion. From these results it may be concluded that predictablestretch is obtained through appropriate selection of origami and origami-inspired patterns.
35

material found in reusable diapers. Disposable diaper material was difficult to obtain for testing
purposes.
Origami-inspired patterns were sewn into four of the five samples. These patterns were
the fan pattern, the arc pattern (similar to the fan, but with arched stitching to increase horizontal
stiffness), a radial water-bomb base [70], and a radial Miura-Ori [71]. The fan pattern was selected
because it has obvious deployment behavior differences between the top and bottom of the pattern.
The arc pattern was chosen as a variation of the fan pattern to examine the effect of lateral changes
to the pattern. The water-bomb base was selected due to is curved deployed state, and the Miura-
Ori was selected because of its versatility. The stitch patterns in the fabric were modified from the
fold patterns to more closely match the deployment behavior of the fabric with paper versions of
the origami. As origami-inspired patterns would likely be the first to be implemented into diaper
designs, precursory testing was focused on this type of pattern.
Four horizontal pairs of marks were added to each of the five samples. Each sample was
manually stretched around a bowling ball as shown in Figure 4.2. The material was stretched
as much as possible without tearing or permanently deforming the fabric. The spherical shape
was used as a straightforward non-developable surface to begin testing at the most fundamental
level. The distance the fabric stretched across the surface, measured between the pre-specified
locations, was normalized to the original, unstretched length in each location, and compared to the
performance of an unstitched control sample (see Figure 4.3). The control sample stretched nearly
uniformly between each pair of points, as was expected. The fan pattern had more stretch at the
top of the pattern than at the bottom. The arc pattern had more stretch in the middle and less stretch
at the top and bottom. The water-bomb pattern behaved similarly to the fan, but with less overall
stretch. The Miura-Ori pattern was the inverse of the arc pattern, with less stretch in the middle
and more at the top and bottom.
These results show that the selected origami or origami-inspired pattern can give significant
control over the stretch behavior of the material. This knowledge can be used to design for the
best fit over a range of sizes. For example, if a snug fit is desired at the waistline, with a looser
fit just below that, the arc pattern could be used. If a single pattern does not meet the design
specifications, patterns can be varied in specific locations to offer even more control over desired
36

fit. Implementing origami or origami-inspired patterns into adult diapers will enable the creation
of a non-baggy, variable fit that prevents sagging and leaking.
This preliminary work illustrates the great power and flexibility which origami stands to
offer the incontinence industry in the area of shape conformance. For further understanding and
quantification of how origami and origami-inspired patterns could be optimized for shape confor-
mance to the diverse human anatomy, we suggest future work in the following specific areas:
• Testing folded patterns
• Performing similar conformance tests with an array of realistically 3D-printed replicas of
the human anatomy
• Directly comparing the shape conformance performance of origami patterned diaper proto-
types with that of off-the-shelf adult diaper products
4.3 Wicking
Absorption materials in diapers work well to rapidly absorb fluids. However, these materi-
als swell significantly to contain the fluid, increasing the thickness of the diaper by more than four
times. This localized swelling becomes physically uncomfortable to the wearer and causes the
diaper to sag. Distributing the fluid more evenly throughout a diaper would decrease the amount
of localized swelling in the absorption materials and reduce sagging.
Wicking in diaper design is important for keeping the skin of the wearer dry. Current
diaper designs use a unidirectional wicking fabric to pull and keep moisture away from the skin
of the wearer. Wicking is often defined as “the ability to sustain capillary flow” [72]. Capillary
flow occurs when the adhesion force between the liquid molecules and the surface medium is
greater than the mutual attraction between the liquid molecules [73]. Experimental investigations
of wicking in multi-ply paper and other mediums have shown improved wicking performance as
compared to individual plies [73, 74]. Increasing the number of fabric layers in a diaper design
could increase wicking from the crotch regions of the diaper to the front and back regions. This
would allow fluid to more evenly distribute throughout the diaper and effectively reduce localized
swelling and sag. These layers could be added through the incorporation of origami or origami-
inspired designs. These designs would be located either between the unidirectional layer and
37

Plain Knife BoxTriple
Layer
Figure 4.4: The test set up for the wicking tests. Each sample contained 84 cm2 of fabric. Allsamples were weighted with paperclips and placed in the colored water at the same time. Thewicking height was measured after five minutes. Results are shown in Figure 4.5.
Cotton
Jersey
Warp
Cotton
Jersey
Weft
Bamboo
Warp
Bamboo
Weft
0
10
20
30
40
50
60
70
Wic
ked
He
igh
t (m
m)
Plain
Triple
Knife
Box
Figure 4.5: Average wicking results for Cotton Jersey and Bamboo fabrics in both the warp andweft directions. These results show that adding layers, either through layering or folding the fabric,improved wicking.
the absorptive layer or incorporated into the unidirectional layer. Because the absorptive layer is
designed to rapidly contain fluid, little to no wicking occurs in this layer. Therefore, all efforts of
redistributing the fluid would need to occur prior to the fluid reaching the absorptive layer.
Origami implementation in diaper design introduces multi-layered structures into the fab-
ric. These layers have distances between surfaces that utilize the adhesion force between the fluid
38

and the surface medium to enhance wicking. These multi-layered structures can be used in ma-
terials that already have strong wicking capabilities to improve the wicking performance beyond
that of the material alone. There are many folded origami patterns available to be used according
to design needs, and these may be modified to improve wicking performance. Adding additional
layers to the fabric would slightly increase the overall thickness of the material, but would greatly
enhance the wicking capability and structural integrity of the material.
A vertical wicking test was designed to illustrate the potential of origami implementation in
designs aimed to improve wicking. The test included two types of fabric, a cotton jersey spandex
(95% cotton 5% spandex with 180 grams per square meter) and a bamboo four-way spandex, both
selected for their wicking capabilities and for their use in reusable diapers. Each fabric was tested
in the warp and weft directions. Warp and weft refer to the yarns used during weaving the fabric.
The lengthwise warp yarns are held in tension on the loom while the transverse weft is drawn
through and inserted over-and-under the warp threads. Testing in the warp and weft directions was
included in case the wicking behavior introduced through origami differed in either direction.
All samples contained 84 cm2 of fabric, beginning in a 6 cm x 14 cm form. Four kinds of
samples were prepared: an unpatterned control sample, a triple-layered sample with no creases, a
knife pleat sample, and a box pleat sample. Two columns of stitches were added to each of the
samples to maintain the folds in the pleated samples and layer distance uniformity in the triple
layered sample after the fabric was wetted. Although preliminary testing showed that the stitches
did not affect wicking, stitches were also added to the control samples to maintain uniformity in
the test.
Samples were prepared in one sitting and allowed to acclimate to the test room for 24 hours
at 73 degrees F prior to testing. All testing was performed on the same day. A single test consisted
of one control sample, one triple-layered sample, one knife pleat sample, and one box pleat sample.
Two repetitions of every test were performed for a total of eight tests.
For testing, each of the samples was clipped to the test stand, as shown in Figure 4.4, and
all were lowered into the colored water at the same time. Each test was run for five minutes, and
the wicking height was measured at the conclusion of each test.
The results of this test showed that the bamboo fabric wicked better than the cotton jersey,
and that the weft direction wicked better than the warp direction (see Figure 4.5 for test results).
39

There was a strong correlation for more layers improving the wicking, but different configurations
with the same final layer count have similar performance. Origami is one method to introduce
more layers into the fabric, thereby improving wicking.
This precursory test was performed to illustrate that layers and origami have the poten-
tial to benefit wicking capabilities in adult diapers. It is recommended that additional testing be
performed to develop statistically significant trends. Additional testing would also need to be per-
formed to explore the following areas:
• Additional materials, including materials found in disposable and reusable diapers
• Additional patterns, including non-trivial pleats
• Additional configurations, such as deformed or stretched fabric and non-uniformly dis-
tributed folds
• Different wetting properties of materials
• Different wicking test configurations, including horizontal or horizontal-vertical testing
4.4 Structure
There is opportunity in diaper design for reducing diaper sag after loading. While some sag
can be eliminated by improving shape conformance, even an initially well-fitting diaper will sag
due to material stretch under loading. Current structures in disposable diapers have an elastic waist
band and elastic around the leg holes. This structure does well in keeping the edges of an unloaded
diaper in place, but does not accommodate sagging once the diaper is loaded. The challenge in
preventing sag due to loading is developing a structural design that is also comfortable to the
wearer.
One solution is a flexible structure created by origami implementation. Introducing origami
into adult diapers will add a supportive, flexible structure that allows movement and shape confor-
mance. Origami-inspired patterns, incorporated into diaper designs can reduce sag by providing
controlled and selective stiffening modes to the material. These patterns can easily be modified to
accommodate required structures and motions. As previously explained in Section 4.2, principles
40

Figure 4.6: Each sag sample was attached to the stand so that the fabric was straight and smooth.400 g were added to the top surface, and the resulting sag was measured and compared with thebaseline sample. Results are shown in Figure 4.7.
−100
−80
−60
−40
−20
0
Pe
rce
nt S
ag
Pla
in
Str
aig
ht
Cu
rve
d
Wa
ter-
Bo
mb
Miu
ra
Figure 4.7: Origami-inspired patterns were sewn into the fabric and then tested for sag perfor-mance. Added structure was shown to decrease the sag by more than 50 percent.
inspired by the behavior of patterns can be transferred to other media and applied using methods
other than pure folding.
This can be illustrated with an extension of the fan pattern example in Section 4.2. If shape
conformance is obtained using either of the first two variations of the folded fan pattern (shown in
Figure 4.1), a less extensible material may be used in the design. The deployability of the pattern
is utilized for the controlled release of fabric around the non-developable surface and the pattern
may be extended to the region between the legs to allow the material to comfortably conform to the
more constrained geometry. The stronger, less extensible material is able to support a load without
sagging. Alternatively, if the abstracted origami-inspired pattern is used, a continuation of the
41
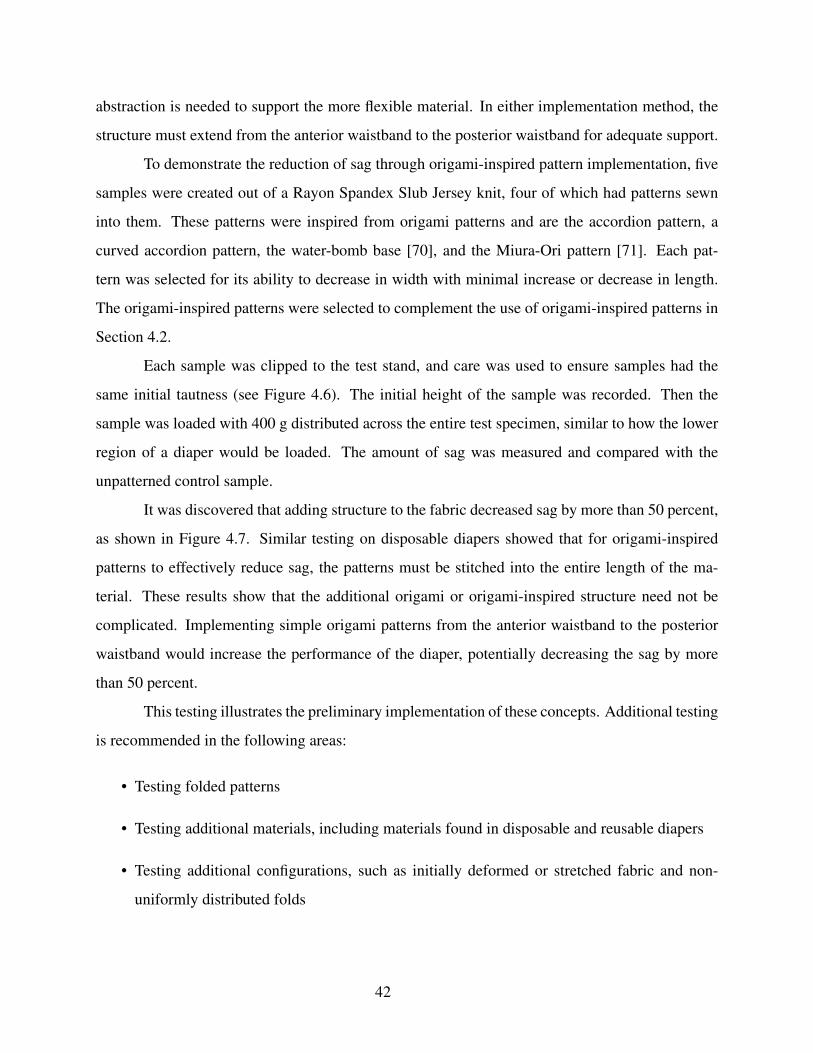
abstraction is needed to support the more flexible material. In either implementation method, the
structure must extend from the anterior waistband to the posterior waistband for adequate support.
To demonstrate the reduction of sag through origami-inspired pattern implementation, five
samples were created out of a Rayon Spandex Slub Jersey knit, four of which had patterns sewn
into them. These patterns were inspired from origami patterns and are the accordion pattern, a
curved accordion pattern, the water-bomb base [70], and the Miura-Ori pattern [71]. Each pat-
tern was selected for its ability to decrease in width with minimal increase or decrease in length.
The origami-inspired patterns were selected to complement the use of origami-inspired patterns in
Section 4.2.
Each sample was clipped to the test stand, and care was used to ensure samples had the
same initial tautness (see Figure 4.6). The initial height of the sample was recorded. Then the
sample was loaded with 400 g distributed across the entire test specimen, similar to how the lower
region of a diaper would be loaded. The amount of sag was measured and compared with the
unpatterned control sample.
It was discovered that adding structure to the fabric decreased sag by more than 50 percent,
as shown in Figure 4.7. Similar testing on disposable diapers showed that for origami-inspired
patterns to effectively reduce sag, the patterns must be stitched into the entire length of the ma-
terial. These results show that the additional origami or origami-inspired structure need not be
complicated. Implementing simple origami patterns from the anterior waistband to the posterior
waistband would increase the performance of the diaper, potentially decreasing the sag by more
than 50 percent.
This testing illustrates the preliminary implementation of these concepts. Additional testing
is recommended in the following areas:
• Testing folded patterns
• Testing additional materials, including materials found in disposable and reusable diapers
• Testing additional configurations, such as initially deformed or stretched fabric and non-
uniformly distributed folds
42

4.5 Conclusion
The purpose of this chapter is to explore the reduction in sag in adult diapers through
the implementation of origami or origami-inspired patterns. These patterns have the potential to
improve the performance of adult diapers in three ways. First, sag can be reduced by improving
shape conformance to non-developable human shapes through curved and deployable origami.
This decreases the amount of baggy material and increases comfort for the wearer. Sag may also
be reduced by more evenly distributing fluid loads through wicking. Wicking is promoted by
the addition of layers through origami folding. Finally, the overall structure can be improved if
origami patterns are introduced in a connected pattern across the length of the material. This will
prevent the material from stretching and sagging once the diaper has been loaded. This chapter has
provided some basic experiments and thoughts to set the foundation for the future work suggested
at the end of each section.
While adult diapers were the inspiration for this research, the technology developed may
be expanded to other fields such as performance gear and clothing; inflatable structures; inflatable
or soft robotics; packaging; casing; feminine products; and packable, light-weight, load-bearing
applications such as tents, chairs, and hammocks.
43

CHAPTER 5. CONCLUSION
This research has demonstrated augmented design capabilities of origami tessellations in
engineering design for predictable and desirable performance in rigid-foldable and non-rigid-
foldable applications.
In Chapter 2, the method to calculate Poisson’s ratio was demonstrated using the Miura-
Ori, Barreto’s Mars, Modified Brick, Triangular and Square Waterbomb Base unit cells. This
showed that the analyzed tessellation origami patterns are single-constraint systems, characterized
by the deployment angle. The method used to calculate Poisson’s ratio for these tessellation unit
cells may be readily applied to other origami tessellation unit cells to increase the understanding
of the deployment motion. The modification of lengths and angles in a fold pattern enable origami
tessellations to be tailored to fit desired deployment motion. Some patterns are more adaptable
than others. The mechanical advantage was also calculated, and the calculation method may be
applied to other tessellation patterns.
This work augments design capabilities by increasing the understanding of a pattern’s mo-
tion and mechanical advantage at any point in deployment. This will enable the selection and
tailoring of patterns based on desired deployment behaviors.
Recommended future work includes developing physical prototypes to experimentally val-
idate the Poisson’s ratio and mechanical advantage models for the analyzed patterns and expanding
the work to other patterns.
Chpater 3 demonstrates that the mathematical point between monostable and bistable be-
havior in triangulated cylinder patterns is defined by the diametric ratio ( DiDo
). The ratio at this
point is called the Stability Transition Ratio (STR), and is dependent only on the number of sides,
n. The STR can be approximated with an exponential function. This equation should only be used
for discrete values of n. This approximation provides an excellent starting point when designing
for monostable or bistable behavior in triangulated cylinders. The STR will be affected by the
44

material used and the folding technique employed. The maximum deployed height was shown to
occur when n = 8, and the minimum height occurs when n≥ 32.
This work augments design capabilities by predicting the motion and behavior of triangu-
lated cylinder patterns and enables designers to understand how to modify the pattern to meet the
needs of specific applications. These behaviors include obtaining a maximum deployed height,
always returning to a closed position, or remaining in either the open or closed configurations.
Future work is recommended to explain the trends in deployment height and stability tran-
sition ratio as a function of n. This would solidify the model’s capabilities.
Methods to implement origami improvements into adult diapers for improved performance
were presented in Chapter 4. The patterns explored have the potential to improve the performance
of adult diapers in three ways. First, sag can be reduced by improving shape conformance to non-
developable human shapes through curved and deployable origami. This decreases the amount of
baggy material and increases comfort for the wearer. Sag may also be reduced by more evenly
distributing fluid loads through wicking. Wicking is promoted by the addition of layers through
origami folding. Finally, the overall structure can be improved if origami patterns are introduced
in a connected pattern across the length of the material.
Introducing origami designs and patterns into adult diaper technology augments design
capabilities by providing additional methods to decrease sag and improve performance.
Future work includes expanding the preliminary research and implementing the patterns in
full diaper prototypes.
Applications of origami tessellations include deployable structures and material-specific
designs used in space, medical, and corrosive-environment applications. Origami tessellations also
have the ability to be scaled to meet specific size requirements without changing the motion of the
pattern. Additionally, tessellations can be modeled using paper, an inexpensive prototyping mate-
rial, before being applied to more expensive materials. Mathematical analysis of the tessellation
options will reduce the cost in both time and money in the designing process.
45

REFERENCES
[1] Daynes, S., Grisdale, A., Seddon, A., and Trask, R., 2013. “Morphing structures using softpolymers for active deployment.” Smart Materials and Structures, 23(1), p. 012001.
[2] Quaglia, C., Dascanio, A., and Thrall, A., 2014. “Bascule shelters: A novel erection strategyfor origami-inspired deployable structures.” Engineering Structures, 75, pp. 276–287.
[3] Kuribayashi, K., Tsuchiya, K., You, Z., Tomus, D., Umemoto, M., Ito, T., and Sasaki, M.,2006. “Self-deployable origami stent grafts as a biomedical application of ni-rich tini shapememory alloy foil.” Materials Science and Engineering: A, 419(1-2), pp. 131–137.
[4] You, Z., 2007. “Motion structures extend their reach.” Materials Today, 10(12), pp. 52–57.
[5] Boroughs, D., 2013. “Folding frontier.” ASEE Prism, 22(5), p. 24.
[6] Rahman, M., and Norton, M. L., 2010. “Two-dimensional materials as substrates for the de-velopment of origami-based bionanosensors.” IEEE Transactions on Nanotechnology, 9(5),pp. 539–542.
[7] Kawaguchi, J., Mori, O., Tsuda, Y., Yamamoto, T., Funase, R., Sawada, H., Kawakatsu, Y.,and Morimoto, M., 2008. “Worlds first solar power sail demonstration flight in interplanetarycruise in 2010.” In 59th International Astronautical Congress.
[8] Wilson, L., Pellegrino, S., and Danner, R., 2013. “Origami sunshield concepts for spacetelescopes.” AIAA Paper(2013-1594).
[9] Zirbel, S. A., Lang, R. J., Thomson, M. W., Sigel, D. A., Walkemeyer, P. E., Trease, B. P.,Magleby, S. P., and Howell, L. L., 2013. “Accommodating thickness in origami-based de-ployable arrays.” Journal of Mechanical Design, 135(11), p. 111005.
[10] Wu, W., and You, Z., 2011. “A solution for folding rigid tall shopping bags.” In Proceed-ings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences,Vol. 467, The Royal Society, pp. 2561–2574.
[11] Cromwik, C., 2007. “Numerical folding of airbags based on optimization and origami.” PhDthesis, Citeseer.
[12] Winder, B. G., Magleby, S. P., and Howell, L. L., 2009. “Kinematic representations of pop-uppaper mechanisms.” Journal of mechanisms and robotics, 1(2), p. 021009.
[13] Onal, C. D., Wood, R. J., and Rus, D., 2011. “Towards printable robotics: Origami-inspiredplanar fabrication of three-dimensional mechanisms.” In Robotics and Automation (ICRA),2011 IEEE International Conference on, IEEE, pp. 4608–4613.
46

[14] Vander Hoff, E., Jeong, D., and Lee, K., 2014. “Origamibot-i: A thread-actuated origamirobot for manipulation and locomotion.” In Intelligent Robots and Systems (IROS 2014),2014 IEEE/RSJ International Conference on, IEEE, pp. 1421–1426.
[15] Lang, R. J., and Hull, T. C., 2005. “Origami design secrets: mathematical methods for anancient art.” The Mathematical Intelligencer, 27(2), pp. 92–95.
[16] Lang, R. J., 2009. “Computational origami: from flapping birds to space telescopes.” In Pro-ceedings of the twenty-fifth annual symposium on Computational geometry, ACM, pp. 159–162.
[17] Bowen, L. A., Grames, C. L., Magleby, S. P., Lang, R. J., and Howell, L. L., 2013. “Anapproach for understanding action origami as kinematic mechanisms.” ASME Paper No.DETC2013-13407.
[18] Edmondson, B. J., Lang, R. J., Magleby, S. P., and Howell, L. L., 2014. “An offset paneltechnique for thick rigidily foldable origami.” In ASME 2014 International Design Engi-neering Technical Conferences and Computers and Information in Engineering Conference,American Society of Mechanical Engineers, pp. V05BT08A054–V05BT08A054.
[19] Edmondson, B. J., Lang, R. J., Morgan, M. R., Magleby, S. P., and Howell, L. L., 2015.“Thick rigidly foldable structures realized by an offset panel.” Origami6: I. Mathematics,p. 149.
[20] Lang, R. J., 2017. “Twists, tilings, and tessellations: Mathematical methods for geometricorigami.”.
[21] Weinand, Y., 2011. “Innovative timber constructions.” In IABSE-IASS, Vol. 400.
[22] Tachi, T., 2009. “Generalization of rigid foldable quadrilateral mesh origami.” In Sympo-sium of the International Association for Shell and Spatial Structures (50th. 2009. Valencia).Evolution and Trends in Design, Analysis and Construction of Shell and Spatial Structures:Proceedings, Editorial Universitat Politecnica de Valencia.
[23] Yellowhorse, A., and Howell, L. L., 2016. “Creating rigid foldability to enable mobility oforigami-inspired mechanisms.” Journal of Mechanisms and Robotics, 8(1), p. 011011.
[24] Watanabe, N., and Kawaguchi, K.-i., 2009. “The method for judging rigid foldability.”Origami, 4, pp. 165–174.
[25] Evans, T. A., Lang, R. J., Magleby, S. P., and Howell, L. L., 2015. “Rigidly foldable origamitwists.” Origami, 6, pp. 119–130.
[26] Fernelius, J. D., Yellowhorse, A., Magleby, S., and Howell, L. “Method for customizingdeployment motion through modifying poisson’s ratio.” In Proceedings of the IASS AnnualSymposium 2016.
[27] Liu, Y., Boyles, J. K., Genzer, J., and Dickey, M. D., 2012. “Self-folding of polymer sheetsusing local light absorption.” Soft Matter, 8(6), pp. 1764–1769.
47

[28] Mori, O., Sawada, H., Funase, R., Morimoto, M., Endo, T., Yamamoto, T., Tsuda, Y.,Kawakatsu, Y., Kawaguchi, J., Miyazaki, Y., et al., 2010. “First solar power sail demon-stration by ikaros.” Transactions of the Japan Society for Aeronautical and Space Sciences,Aerospace Technology Japan, 8(ists27), pp. To 4 25–To 4 31.
[29] Heller, A., 2003. “A giant leap for space telescopes.” Science and Technology Review,Lawrence Livermore National Laboratory, Livermore, CA, pp. 12–18.
[30] Ma, J., and You, Z., 2013. “A novel origami crash box with varying profiles.” In ASME 2013International Design Engineering Technical Conferences and Computers and Information inEngineering Conference, American Society of Mechanical Engineers, pp. V06BT07A048–V06BT07A048.
[31] Cheng, B., Kim, M., Lin, H., Fung, S., Bush, Z., and Seo, J. H., 2012. “Tessella: interactiveorigami light.” In Proceedings of the Sixth International Conference on Tangible, Embeddedand Embodied Interaction, ACM, pp. 317–318.
[32] Howell, L. L., 2001. Compliant mechanisms. John Wiley & Sons.
[33] Wei, Z. Y., Guo, Z. V., Dudte, L., Liang, H. Y., and Mahadevan, L., 2013. “Geometricmechanics of periodic pleated origami.” Physical review letters, 110(21), p. 215501.
[34] Findley, T. M., 2013. “An experimental analysis of auxetic folded cores for sandwich struc-tures based on origami tessellations.” PhD thesis, University of Toledo.
[35] Virk, K., Monti, A., Trehard, T., Marsh, M., Hazra, K., Boba, K., Remillat, C., Scarpa,F., and Farrow, I., 2013. “Silicomb peek kirigami cellular structures: mechanical responseand energy dissipation through zero and negative stiffness.” Smart Materials and Structures,22(8), p. 084014.
[36] Lv, C., Krishnaraju, D., Konjevod, G., Yu, H., and Jiang, H., 2014. “Origami based mechan-ical metamaterials.” Scientific reports, 4, p. 5979.
[37] Schenk, M., and Guest, S. D., 2011. “Origami folding: A structural engineering approach.”In Origami 5: Fifth International Meeting of Origami Science, Mathematics, and Education,CRC Press, Boca Raton, FL, pp. 291–304.
[38] You, Z., and Kuribayashi, K., 2009. “Expandable tubes with negative poisson’s ratio andtheir application in medicine.” Origami, 4, pp. 117–127.
[39] Miura, K., and Tachi, T., 2010. “Synthesis of rigid-foldable cylindrical polyhedral.” Sym-metry: Art and Science, International Society for the Interdisciplinary Study of Symmetry,Gmuend, Austria.
[40] Norman, A., Seffen, K., and Guest, S., 2009. “Morphing of curved corrugated shells.” Inter-national Journal of Solids and Structures, 46(7-8), pp. 1624–1633.
[41] Dureisseix, D., 2012. “An overview of mechanisms and patterns with origami.” InternationalJournal of Space Structures, 27(1), pp. 1–14.
48

[42] Jovanovic, M., 2014. “Algorithmic approach to origami pattern application in architecturaldesign.” PROCEEDINGS VOLUME, p. 100.
[43] Butler, J., Morgan, J., Pehrson, N., Tolman, K., Bateman, T., Magleby, S. P., and Howell,L. L., 2016. “Highly compressible origami bellows for harsh environments.” In ASME 2016International Design Engineering Technical Conferences and Computers and Information inEngineering Conference.
[44] Butler, J., Magleby, S., Howell, L., Mancini, S., and Parness, A., 2017. “Highly compressibleorigami bellows for microgravity drilling-debris containment.” In AIAA SPACE and Astro-nautics Forum and Exposition, p. 5341.
[45] Bruton, J. T., Nelson, T. G., Zimmerman, T. K., Fernelius, J. D., Magleby, S. P., and Howell,L. L., 2016. “Packing and deploying soft origami to and from cylindrical volumes withapplication to automotive airbags.” Royal Society open science, 3(9), p. 160429.
[46] Kresling, B., Abel, J. F., and Cooke Robert, J., 2008. “Natural twist buckling in shells:From the hawkmoth’s bellows to the deployable kresling-pattern and cylindrical miuraori.”In Proceedings of the 6th International Conference on Computation of Shell and SpatialStructures, John F. Abel and J. Robert Cooke, eds., Ithaca.
[47] Hunt, G. W., and Ario, I., 2005. “Twist buckling and the foldable cylinder: an exercise inorigami.” International Journal of Non-Linear Mechanics, 40(6), pp. 833–843.
[48] Guest, S. D., and Pellegrino, S., 1994. “The folding of triangulated cylinders, part i: geomet-ric considerations.” Journal of Applied Mechanics, 61(4), pp. 773–777.
[49] Guest, S., and Pellegrino, S., 1994. “The folding of triangulated cylinders, part ii: the foldingprocess.” Journal of Applied Mechanics, 61(4), pp. 778–783.
[50] Guest, S., and Pellegrino, S., 1996. “The folding of triangulated cylinders, part iii: ex-periments.” Transactions - American Society of Mechanical Engineers Journal of AppliedMechanics, 63, pp. 77–83.
[51] Cai, J., Deng, X., Zhou, Y., Feng, J., and Tu, Y., 2015. “Bistable behavior of the cylindricalorigami structure with kresling pattern.” Journal of Mechanical Design, 137(6), p. 061406.
[52] Yasuda, H., Lee, M., and Yang, J. “Tunable static and dynamic behavior of triangulatedcylindrical origami.” In Proceedings of the IASS Annual Symposium 2016.
[53] Mayo-Clinic, 2017. Urinary incontinence https://www.mayoclinic.org/
diseases-conditions/urinary-incontinence/symptoms-causes/syc-20352808
[Online; accessed February-2018].
[54] Thom, D., 1998. “Variation in estimates of urinary incontinence prevalence in the commu-nity: effects of differences in definition, population characteristics, and study type.” Journalof the American Geriatrics Society, 46(4), pp. 473–480.
[55] MedicineNet.com, 2018. Urinary incontinence in women https://www.
medicinenet.com/urinary_incontinence_in_women/article.htm#what_is_
urinary_incontinence [Online; accessed February-2018].
49

[56] Zirbel, S. A., Tolman, K. A., Trease, B. P., and Howell, L. L., 2016. “Bistable mechanismsfor space applications.” PloS one, 11(12), p. e0168218.
[57] Holland, A., Lysford, W., Pearson, J., Straub, J., and Kerlin, S., 2016. “Origami style solarpanels with development of dual purpose integrated phased array communications system.”Poster presented at: University of North Dakota’s, pp. 1–2.
[58] Miyashita, S., Guitron, S., Yoshida, K., Li, S., Damian, D. D., and Rus, D., 2016. “Ingestible,controllable, and degradable origami robot for patching stomach wounds.” In Robotics andAutomation (ICRA), 2016 IEEE International Conference on, IEEE, pp. 909–916.
[59] Ballard, Z. C., Thrall, A. P., and Smith, B. J., 2015. “Parametric study of the effect ofhinged connectors on the behavior of origami-inspired structures comprised of sandwich pan-els.” In ASME 2015 International Design Engineering Technical Conferences and Comput-ers and Information in Engineering Conference, American Society of Mechanical Engineers,pp. V05BT08A027–V05BT08A027.
[60] Ballard, Z. C., Gerbo, E. J., Thrall, A. P., and Smith, B. J., 2016. “Behavior of sandwichpanels in a deployable structure.” Journal of Structural Engineering, 142(10), p. 04016073.
[61] Gattas, J. M., and You, Z., 2013. “Quasi-static impact response of alternative origami-coresandwich panels.” In ASME 2013 International Design Engineering Technical Conferencesand Computers and Information in Engineering Conference, American Society of Mechani-cal Engineers, pp. V06BT07A032–V06BT07A032.
[62] Yang, Y., Nara, C., Chen, X., and Hagiwara, I., 2017. “Investigation of helmet based onorigami structures.” In ASME 2017 International Design Engineering Technical Conferencesand Computers and Information in Engineering Conference, American Society of Mechani-cal Engineers, pp. V05BT08A040–V05BT08A040.
[63] Jeong, D., and Lee, K., 2018. “Design and analysis of an origami-based three-finger manip-ulator.” Robotica, 36(2), pp. 261–274.
[64] Laschi, C., Mazzolai, B., and Cianchetti, M., 2016. “Soft robotics: Technologies and systemspushing the boundaries of robot abilities.” Sci. Robot., 1(1), p. eaah3690.
[65] Pagano, A., Leung, B., Chien, B., Yan, T., Wissa, A., and Tawfick, S., 2016. “Multi-stableorigami structure for crawling locomotion.” In ASME 2016 Conference on Smart Materi-als, Adaptive Structures and Intelligent Systems, American Society of Mechanical Engineers,pp. V002T06A005–V002T06A005.
[66] Chen, H.-Y., Lee, I.-K., Leopoldseder, S., Pottmann, H., Randrup, T., and Wallner, J., 1999.“On surface approximation using developable surfaces.” Graphical Models and Image Pro-cessing, 61(2), pp. 110–124.
[67] Kilian, M., Flory, S., Chen, Z., Mitra, N. J., Sheffer, A., and Pottmann, H., 2008. “Devel-opable surfaces with curved creases.” Proc. AAG, pp. 33–36.
[68] Dudte, L. H., Vouga, E., Tachi, T., and Mahadevan, L., 2016. “Programming curvature usingorigami tessellations.” Nature materials, 15(5), pp. 583–588.
50

[69] Leong, C. C., 2011. “Simulation of nonzero gaussian curvature in origami by curved-creasecouplets.” In Origami5: Fifth International Meeting of Origami Science, Mathematics, andEducation, pp. 53–67.
[70] Hanna, B. H., Lund, J. M., Lang, R. J., Magleby, S. P., and Howell, L. L., 2014. “Water-bomb base: a symmetric single-vertex bistable origami mechanism.” Smart Materials andStructures, 23(9), p. 094009.
[71] Miura, K., 1994. Map fold a la miura style, its physical characteristics and application to thespace science.
[72] Sampath, M., and Senthilkumar, M., 2009. “Effect of moisture management finish on comfortcharacteristics of microdenier polyester knitted fabrics.” Journal of Industrial textiles.
[73] Masoodi, R., and Pillai, K. M., 2010. “Darcy’s law-based model for wicking in paper-likeswelling porous media.” AIChE journal, 56(9), pp. 2257–2267.
[74] McDonald, P. E., 2006. “Wicking in multi-ply paper structures with dissimilar plies.” PhDthesis, Georgia Institute of Technology.
51