automatic control and system theory - … · control of digital systems g. palli (dei) automatic...
TRANSCRIPT

Control of Digital Systems
Automatic Control & System Theory 1 G. Palli (DEI)
AUTOMATIC CONTROL AND SYSTEM THEORY
CONTROL OF DIGITAL SYSTEMS
Gianluca Palli
Dipartimento di Ingegneria dell’Energia Elettrica e dell’Informazione (DEI) Università di Bologna
Email: [email protected]
TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.:

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 2
Analog Control Systems
Analog Control Systems ü The computation of the control action is carried out in the
continuous-time domain, by means of electric, hydraulic or mechanical systems
Controller plant
transducer
power amplifier actuator
+
-

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 3
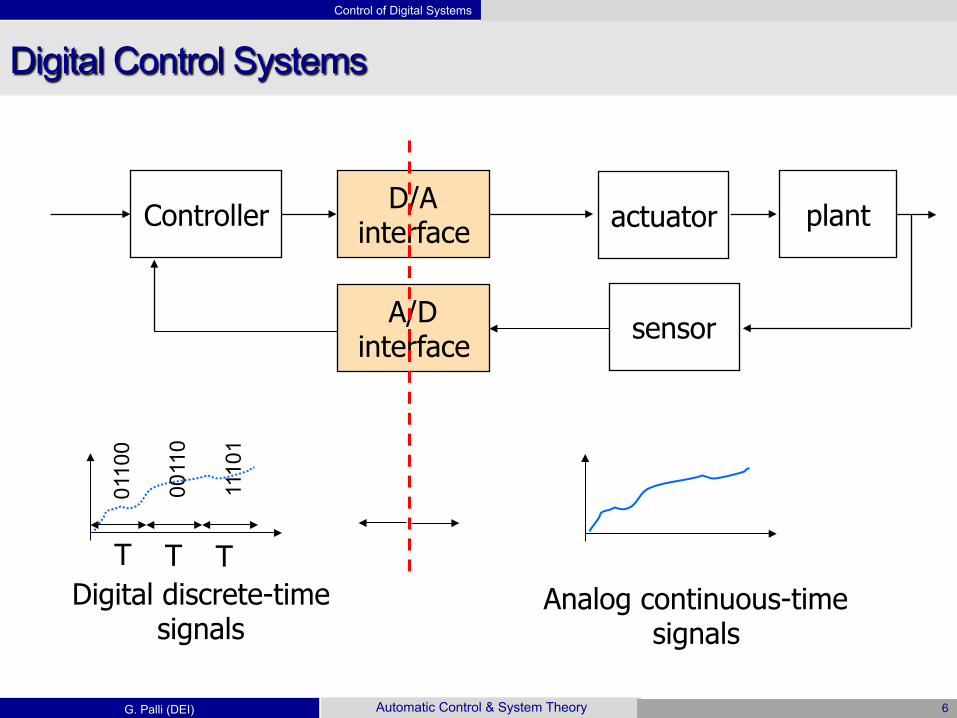
Digital Control Systems
Digital Control Systems ü A computer is present in the control loop:
ü The control action is computed in the discrete-time domain with period T
ü Suitable interfaces are needed between: ü The plant (continuous time domain) ü The controller (discrete time domain)
plant
transducer
actuator DIGITAL COMPUTER D/A A/D
Clock (T)
Discrete-time domain
10
10
11
00
+
-

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 4
Digital Control Systems vs. Analog Control Systems
• Better precision and computational capabilities • More complex control algorithms
• Improved flexibility • Different operating conditions can be managed
by just changing the software
• Better reliability and repeatability • No fatigue, thermal drift etc.
• Digital signals can be easily transmitted • Digital signals are more robust than analog ones
with respect to noise and disturbances
• A more difficult design process • The designer must possess competences in
the field of electronics and digital interfaces
• Weaker stability • Transmission discontinuities, delays • The choice of the sampling time is important
• Undesired and unmanaged system failures • It is difficult to consider and evaluate all the
possible failures during the software design
• Electric power is always needed

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 5
Signals Typologies
Analog continuous-time Sampled
data
Digital signal (quantized) Quantized continuous-time
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 6
Digital Control Systems
Analog continuous-time signals
Digital discrete-time signals
T
0110
0
T
0011
0
T
1110
1 D/A
interface plant Controller
sensor
actuator
A/D interface
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 7
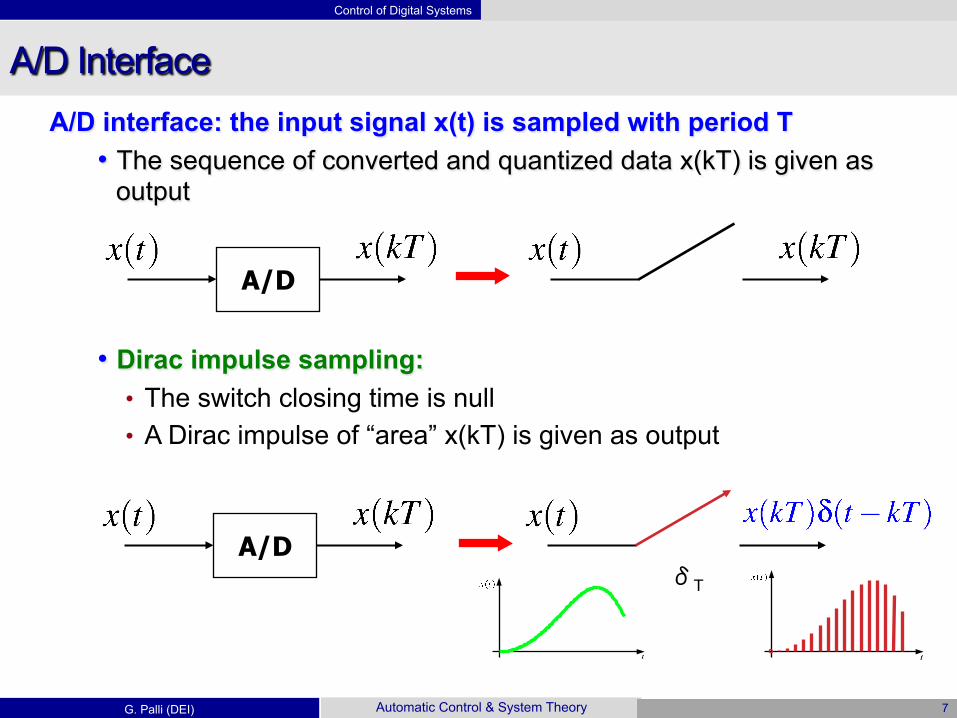
A/D Interface A/D interface: the input signal x(t) is sampled with period T
• The sequence of converted and quantized data x(kT) is given as output
• Dirac impulse sampling: • The switch closing time is null • A Dirac impulse of “area” x(kT) is given as output
A/D
A/D δT

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 8
• Provides an analog signal from the input sequence of sampled data • The solution of the signal reconstruction problem is not unique if the
SHANNON THEOREM is not satisfied (ωs > 2 ωc, ωs = 2 π/T)
• Zero-Order Hold gives the output:
• Assuming an ideal sampling:
D/A Interface

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 9
Two approaches are possible to the design of digital control laws: 1. “Direct” method
• Discretization of the plant model • Design of the controller in the discrete-time domain
2. “Indirect” Method • Simplest approach, it does not requires specific knowledge of
design techniques in the discrete-time domain • Some limitations are given by the choice of the sampling time
Design of Discrete-Time Controllers

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 10
Digit
• Indirect method (discretization)
R(s) G(s) x(t) e(t) ua(t) ya(t)
R(z) G(s) x(t) e(t) ua(t) ya(t)
H(s)
• T = … ? (as small as possible…)
Design of Discrete-Time Controllers

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 11
With the “indirect” method, four steps are usually involved: 1. Choice of the sample time T
2. Design of the continuous–time control law R(s)
3. Discretization of the control function R(s) (e.g. bilinear transformation)
4. Verification of the result by simulation (and experiments)
Design of Discrete-Time Controllers

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 12
Digit Design of digital controllers
1) Choice of T and verification of the stability margins of the system
• In designing the control law R(s), the process to be considered is

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 13
Digit Design of digital controllers
• Example: Given the system
Design a digital lag net such that the phase margin results Mf = 55o
The smallest time constant, corresponding to the pole in p = -2, is τ = 0.5 s. Then, consider the sample time T = 0.1 s.
Impulse Response
Time (sec)
Am
plitu
de
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 14
Digit Design of digital controllers
Bode diagrams of the original transfer function and of the sampled one Bode Diagram
Frequency (rad/sec)
Phas
e (d
eg)
Mag
nitu
de (d
B)
-100
-80
-60
-40
-20
0
20
10-1 100 101-360
-315
-270
-225
-180
-135
-90
G(s)
G(z)

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 15
Digit
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
-2 -1.5 -1 -0.5 0 0.5 1-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Design of digital controllers
• Considering the zero-order hold, the following system is obtained
G(s)
G1(s)
There is a small increase of the phase lag.
In this case, is “small” since T is small.
A similar result is obtained
with the approximation

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 16
Digit Design of digital controllers
• Let then consider G1(s) instead of G(s)
• The result of the design of the lag net for G1(s) (phase margin MF = 55o) is:
• By discretization of R(s) (ex. bilinear trans.) with T = 0.1 s:
• N.B. Possible numerical problems for “similar” numbers (round)
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 17
Digit Design of digital controllers
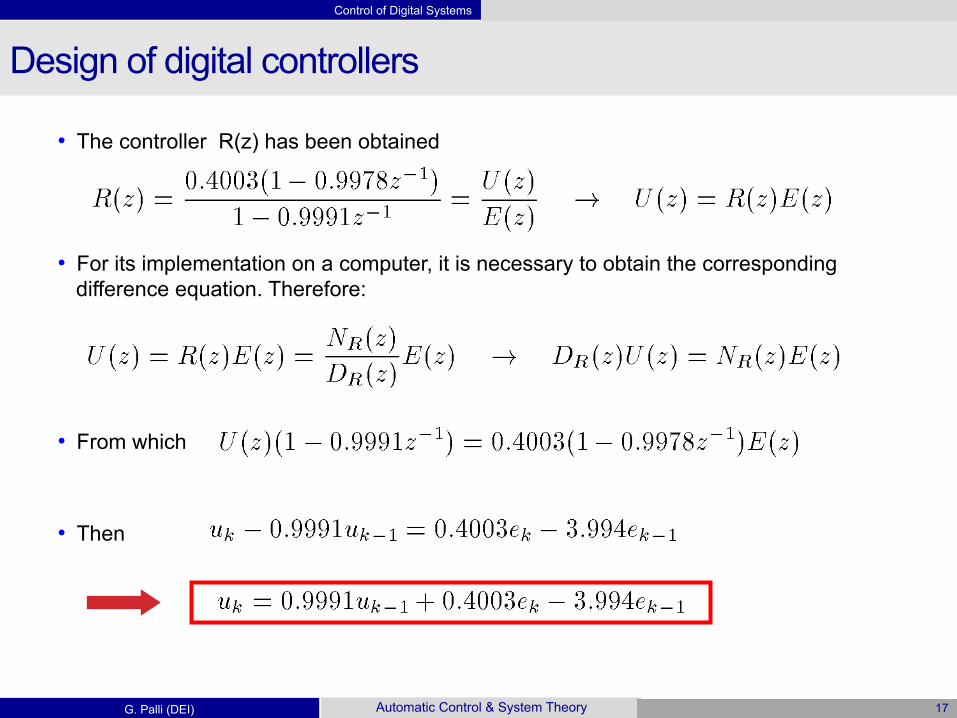
• The controller R(z) has been obtained
• For its implementation on a computer, it is necessary to obtain the corresponding difference equation. Therefore:
• From which
• Then

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 18
Digit Design of digital controllers
0 10 20 30 40 500
0.5
1
1.5
tempo (s)
Uscita del sistema
0 10 20 30 40 50-0.2
0
0.2
0.4
0.6
tempo (s)
Azione di controllo
0 1 2 3 4 50
0.2
0.4
0.6
0.81
tempo (s)
Uscita del sistema
0 1 2 3 4 50
0.1
0.2
0.3
0.4
tempo (s)
Azione di controllo
Results with T = 0.1 s

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 19
Digit Design of digital controllers
Results with T = 0.5 s
0 10 20 30 40 500
0.5
1
1.5
tempo (s)
Uscita del sistema
0 10 20 30 40 50-0.2
0
0.2
0.4
0.6
tempo (s)
Azione di controllo
0 1 2 3 4 50
0.2
0.4
0.6
0.81
tempo (s)
Uscita del sistema
0 1 2 3 4 50
0.1
0.2
0.3
0.4
tempo (s)
Azione di controllo
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 20
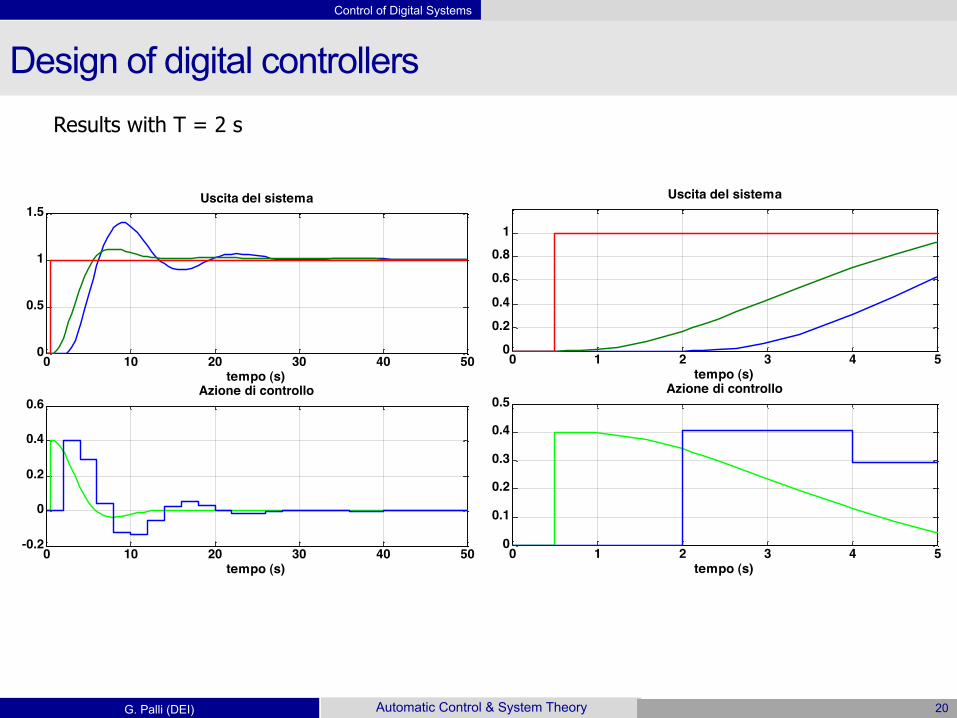
Digit Design of digital controllers Results with T = 2 s
0 10 20 30 40 500
0.5
1
1.5
tempo (s)
Uscita del sistema
0 10 20 30 40 50-0.2
0
0.2
0.4
0.6
tempo (s)
Azione di controllo
0 1 2 3 4 50
0.2
0.4
0.6
0.81
tempo (s)
Uscita del sistema
0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
tempo (s)
Azione di controllo

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 21
Description of sampled data systems
Differential equations
Laplace transform
CONTINUOUS-TIME SYSTEMS
Finite-difference equations
Z transform
DISCRETE-TIME SYSTEMS
D/A
A/D

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 22
D/A
S&H
Plant Control algorithm
Y
Sensor
Actuator
A/D
The control algorithm must be designed in such a way that the overall control system with the same input behaves as much as possible to the continuous-time regulator R(s)
Main problem: selection of the sample time T so that the sampled– data represent a “good” approximation of the continuous-time signals
Discretization of Continuous-Time Controllers
Hold
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 23
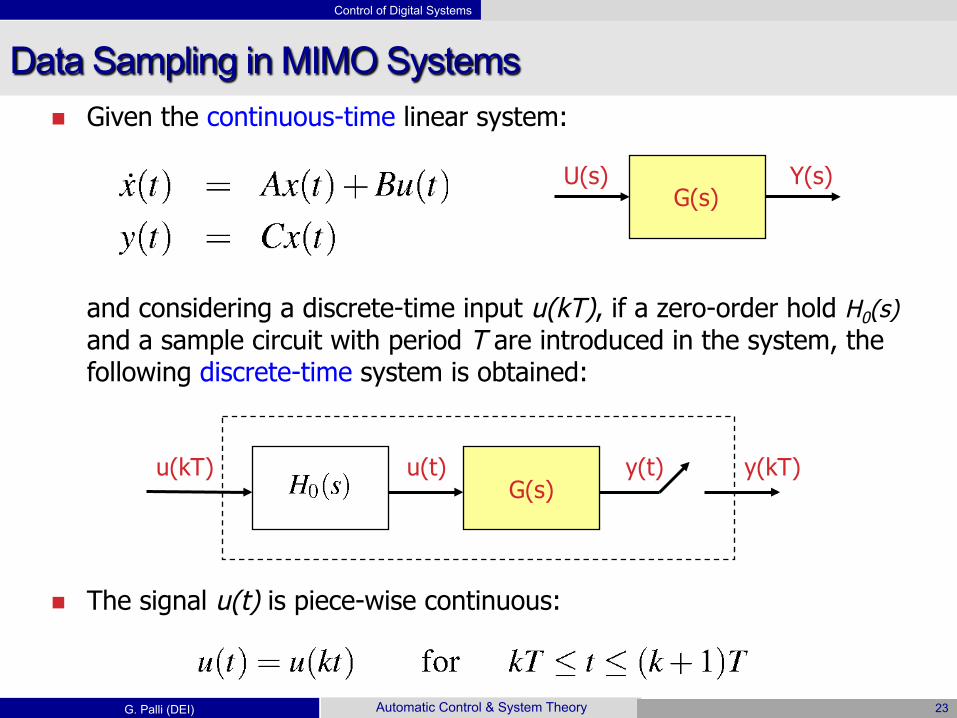
Data Sampling in MIMO Systems n Given the continuous-time linear system:
and considering a discrete-time input u(kT), if a zero-order hold H0(s) and a sample circuit with period T are introduced in the system, the following discrete-time system is obtained:
n The signal u(t) is piece-wise continuous:
u(kT) u(t) y(t) y(kT) G(s)
U(s) Y(s) G(s)

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 24
n The signal u(t) is piecewise continuous:
n The signal y(t) sampled with a period T generates the sampled signal y(kT)
u(kT) u(t)
0 2 4 6 8 10 -3
-2
-1
0
1
2
3
Tempo (sec)
Segnale y(t)
0 2 4 6 8 10 -3
-2
-1
0
1
2
3
Tempo kT (sec)
Segnale y(kT) y(kT) y(t)
for
Data Sampling

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 25
n The input-output behavior of the overall system is the same of the discrete-time system:
G(z) U(z) Y(z)
u(kT) u(t) y(t) y(kT) G(s)
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 26
n A relation exists between matrices (A, B, C) and matrices (F, G, H). It can be computed by solving the following linear differential equation in the interval [kT, (k+1)T]:
n The state x(t) that is reached starting from the initial state x(kT) at the time
instant t=kT is:
n Hence, being u(t)=u(kT) constant, the state x((k+1)T) reached at the time instant t=(k+1)T is:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 27
n By means of the following change of variable:
the matrix G can be transformed as:
n The output y(kT) is obtained from the signal y(t) sampled at t=kT:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 28
n Then, the relation between the matrices (A, B, C) and (F, G, H) is:
n The discrete-time system G(z) obtained from the continuous-time one G(s) in this way is called sampled-data system.
n Since matrices F and G depend on the sample time T, it is important to analyze how the structural properties of reachability and observability of the sampled-data system change in function of T.
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 29
n Being matrix F = e AT always invertible, in the sampled data system: n The controllability is always equivalent to reachability n The reconstructability is always equivalent to observability
For single-input systems, the following property holds: n THEOREM: Consider the completely reachable system (A, b) and the
sampling period T. The corresponding sampled-data system is reachable iff each couple λi , λj of distinct eigenvalues of A with the same real part satisfies the relation:
Reachability and Observability

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 30
For single-output systems, the following property holds (dual property with respect to the previous one):
n THEOREM: Consider the completely observable system (A, c) and the sampling period T. The corresponding sampled data system is observable iff each couple λi , λj of distinct eigenvalues of A with the same real part satisfies the relation:
n Note: If all the eigenvalues of matrix A are real, the sampled-data system maintains always, for any T > 0, the same structural characteristics (reachability, controllability, observability, reconstructability) of the original continuous-time system (A, b, c).
Reachability and Observability

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 31
n Example: compute the matrices of the sampled-data system obtained from the following continuous-time system:
The matrices (F, G, H) result:
Data Sampling in MIMO Systems
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 32
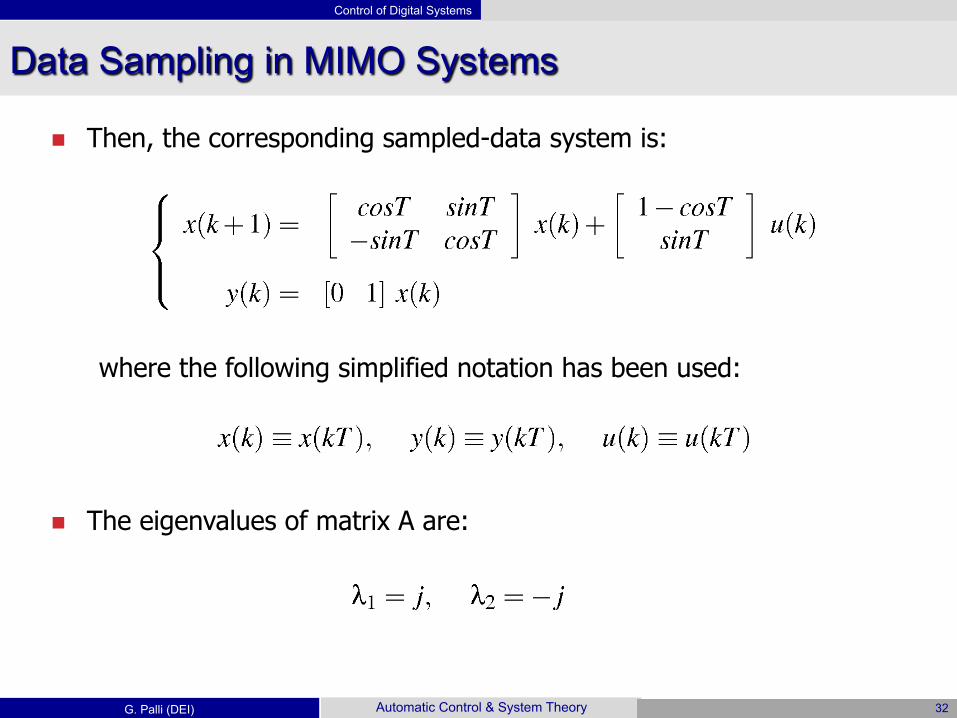
n Then, the corresponding sampled-data system is:
where the following simplified notation has been used:
n The eigenvalues of matrix A are:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 33
n The reachability matrix of the sampled-data system is:
n For T=π the system is not fully reachable, indeed:
n From the theorem on the reachability of sampled data systems:
Data Sampling in MIMO Systems - Reachability

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 34
n The observability matrix of the sampled data system is:
n The sampled data system is fully observable iff:
n The characteristic polynomial of the matrix F is:
n Then, the eigenvalues of F are:
Data Sampling in MIMO Systems - Observability

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 35
0 5 10 15 20 -4 -3 -2 -1 0 1 2 3 4
T = π/20
0 5 10 15 20 -15
-10
-5
0
5
10
15
T = π/2
0 5 10 15 20 -8 -6 -4 -2 0 2 4 6 8
T = π/5
0 5 10 15 20 -20 -15 -10 -5 0 5
10 15 20
T = π
Data Sampling in MIMO Systems – Impulse Response

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 36
T = π/5
T = π 0 5 10 15 20 -0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6 0 5 10 15 20 -0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 5 10 15 20 -0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
T = π/20
The properties of controllability and observability degrades as the sampling period T grows
Data Sampling in MIMO Systems – Impulse Response

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 37
n The transfer function G(s) of the continuous-time system is:
n The transfer function G(z) of the corresponding sampled data system is:
Data Sampling in MIMO Systems – Transfer Function
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 38
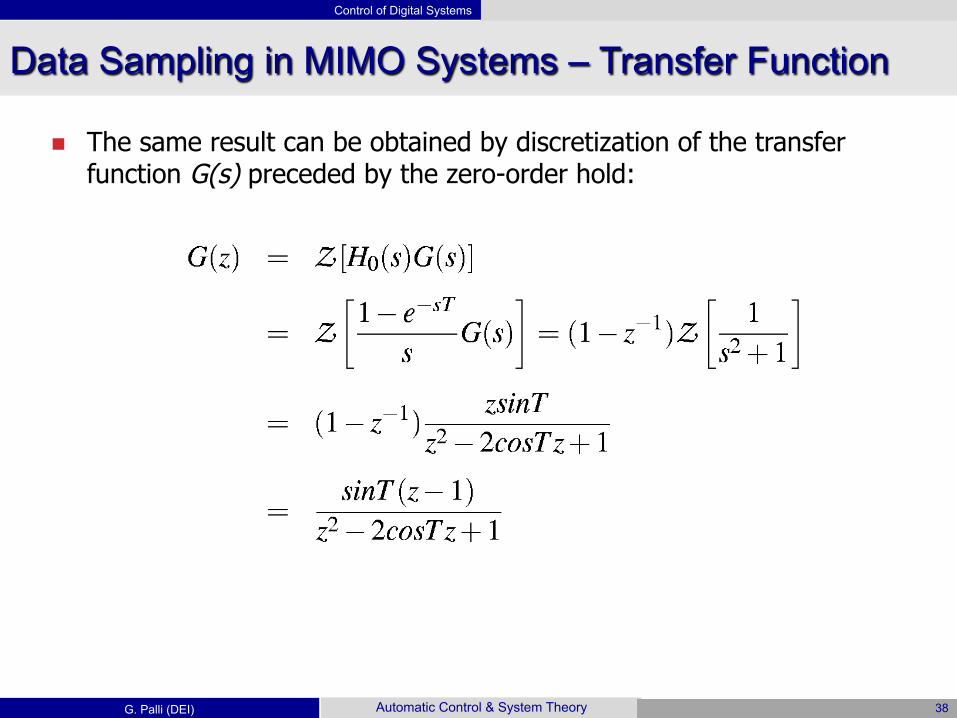
n The same result can be obtained by discretization of the transfer function G(s) preceded by the zero-order hold:
Data Sampling in MIMO Systems – Transfer Function

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 39
n Example: consider the following purely inertial system with unitary mass (m=1) subject to the external force u(t):
n The state vector is given by the position and the velocity
n The system output is the position of the mass
x
u(t) m
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 40
n The dynamic model in the state-space representation is:
n The matrices F and G of the corresponding sampled-data system are:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 41
n Therefore, the sampled-data system can be written as:
n It can be easily verified that this system is fully reachable and observable
n We are interested in designing a dead-beat controller: a state feedback controller u(k)=K x(k) such that all the eigenvalues of the closed-loop system eig(F+GK) are zero. This implies that the desired characteristic polynomial of the closed loop system is:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 42
n Assuming as state feedback matrix. Given u(k)=K x(k), the following system dynamic matrix is obtained:
n The characteristic polynomial of this matrix is:
n By imposing the desired characteristic polynomial we obtain:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 43
n Since we are considering a dead-beat controller, the state feedback u(k)=K x(t) is able to drive the state exactly to zero in just two steps (since the order of the system is two) with an arbitrary small sample time T
Data Sampling in MIMO Systems
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 44
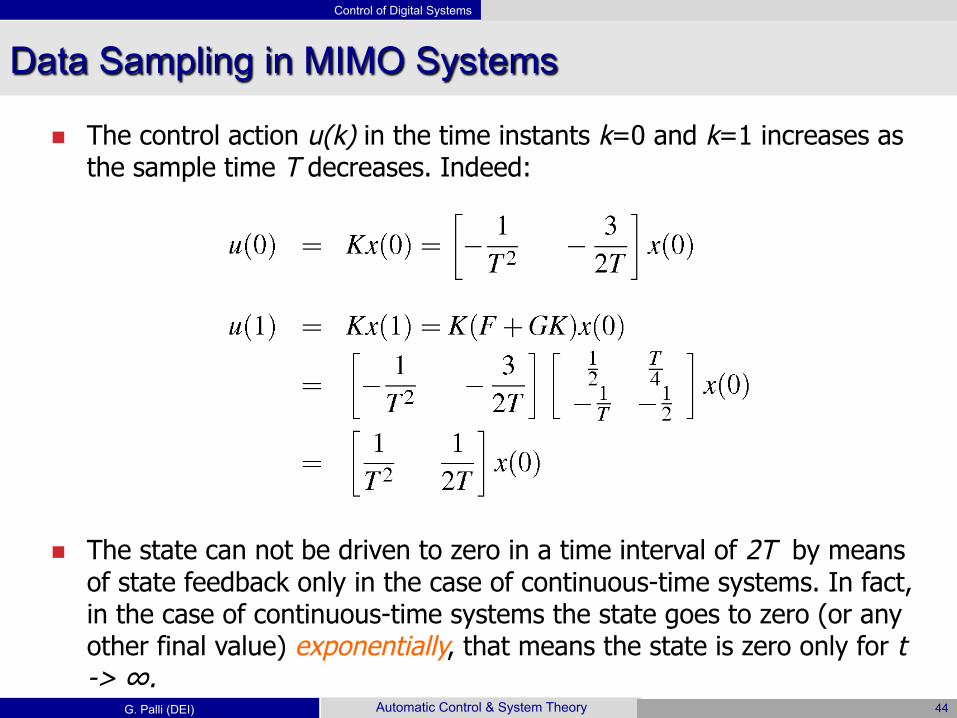
n The control action u(k) in the time instants k=0 and k=1 increases as the sample time T decreases. Indeed:
n The state can not be driven to zero in a time interval of 2T by means of state feedback only in the case of continuous-time systems. In fact, in the case of continuous-time systems the state goes to zero (or any other final value) exponentially, that means the state is zero only for t -> ∞.
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 45
n Simulink scheme
Zero-Order Hold1
Zero-Order Hold
uo To Workspace6
ys To Workspace3
xo To Workspace2
yd To Workspace14
y To Workspace13
t To Workspace1
Pulse Generator
K*u Kups
K*u K
1 s
Integrator
Clock
K*u C1
K*u C
K*u B
K*u A
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 46
n Ts = 1 sec, x0 = [5, -2]T, null setpoint
0 2 4 6 8 10 -2 0 2 4 6 Response of yd, y and ys
0 2 4 6 8 10 -5
0
5 Response of x1 and x2
0 1 2 3 4 5 6 7 8 9 10 -2
-1
0
1
2
3
4
5 Control action u(k)
Input values u(k) = -2, 4
Data Sampling in MIMO Systems
Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 47
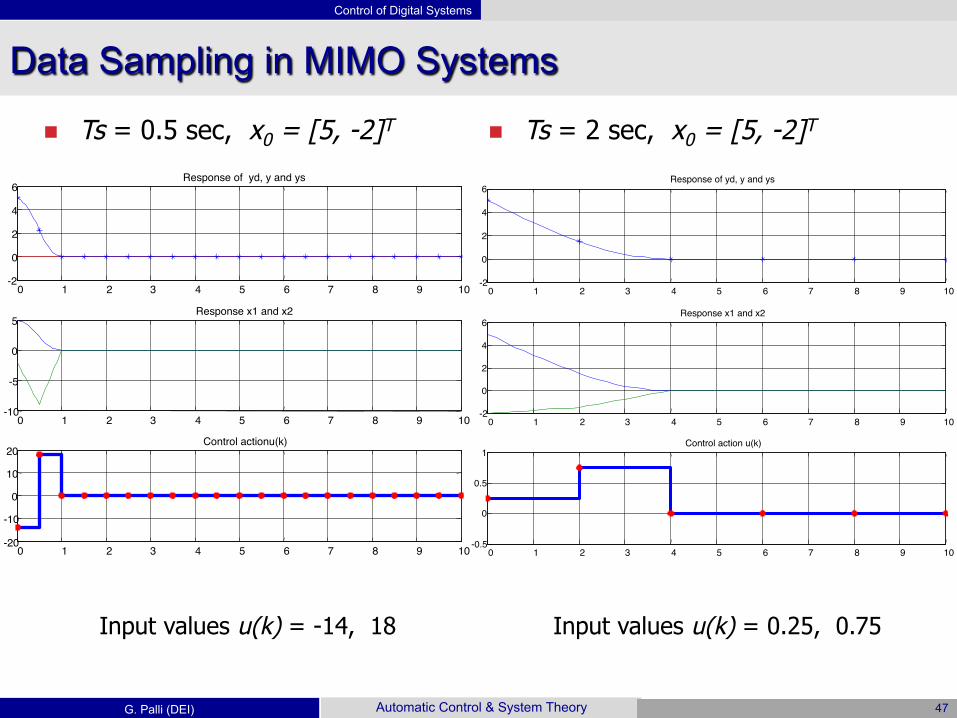
n Ts = 0.5 sec, x0 = [5, -2]T
Input values u(k) = -14, 18
0 1 2 3 4 5 6 7 8 9 10 -2 0 2 4 6 Response of yd, y and ys
0 1 2 3 4 5 6 7 8 9 10 -10 -5 0 5 Response x1 and x2
0 1 2 3 4 5 6 7 8 9 10 -20 -10
0 10 20 Control actionu(k)
n Ts = 2 sec, x0 = [5, -2]T
0 1 2 3 4 5 6 7 8 9 10 -2 0 2 4 6 Response of yd, y and ys
0 1 2 3 4 5 6 7 8 9 10 -2 0 2 4 6 Response x1 and x2
0 1 2 3 4 5 6 7 8 9 10 -0.5 0
0.5 1 Control action u(k)
Input values u(k) = 0.25, 0.75
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 48
n Ts = 1 sec, x0 = [5, -2]T, square input setpoint with amplitude A = 10
0 10 20 30 40 50 60 -5 0 5
10 15 Respose of yd, y and ys
0 10 20 30 40 50 60 -10 -5 0 5
10 15 Response of x1 and x2
0 10 20 30 40 50 60 -3
-2
-1
0
1
2
3 Control action u(k)
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 49
n If the state is not measureable, a dead-beat observer can be designed: in such an observer the state estimation error evolves with a dynamics characterized by two null eigenvalues (modes). This means that the eigenvalues of A+LC (or F+LH) are all zeros.
n Example: design of a reduced-order dead-beat observer.
n Recalling the design of a generic reduced-order observer in the discrete-time case: the system output directly coincides with the first q=1 components of the state.
n Therefore, the observer dynamics is:
F
G
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 50
n The dynamics of the dead-beat reduced-order observeris then:
it follows
and the state estimation is:
n The transfer function G(s) of the continuous-time system is: n The transfer function G(z) of the
corrsponding discrete-time system is:
n The eigenvalues are imposed to be zero:
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 51
Zero-Order Hold1
Zero-Order Hold
uo To Workspace6
xhat To Workspace4
ys To Workspace3
xo To Workspace2
yd To Workspace14
y To Workspace13
t To Workspace1
In1 y
In2 u x hat
Subsystem
Pulse Generator
K*u Kups
K*u K
1 s
Integrator
Clock
K*u C.
K*u C
K*u B
K*u A
n Simulink scheme
K*u
K*u L
-1
-1 Z
Integer Delay K*u
-1/T
2
1 In1 y
1 x hat
T/2 Z
Integer Delay1 In2 u
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 52
0 1 2 3 4 5 6 7 8 9 10 -10 -5 0 5 Andamento yd, y e ys
0 1 2 3 4 5 6 7 8 9 10 -10 -5 0 5
10 Andamento x1 e x2
0 1 2 3 4 5 6 7 8 9 10 -5 0 5
10 Azione di controllo u(k)
0 1 2 3 4 5 6 7 8 9 10 -10 -5 0 5 Andamento yd, y e ys
0 1 2 3 4 5 6 7 8 9 10 -20 -10
0 10 20 Andamento x1 e x2
0 1 2 3 4 5 6 7 8 9 10 -20 0
20 40 Azione di controllo u(k)
n Ts = 2 sec, x0 = [5, -2]T n Ts = 1 sec, x0 = [5, -2]T
Data Sampling in MIMO Systems

Control of Digital Systems
G. Palli (DEI) Automatic Control & System Theory 53
n Ts = 2 sec, x0 = [5, -2]T n Ts = 1 sec, x0 = [5, -2]T
0 10 20 30 40 50 60 -5 0 5
10 15 Andamento yd, y e ys
0 10 20 30 40 50 60 -10 0
10 20 Andamento x1 e x2
0 10 20 30 40 50 60 -5
0
5 Azione di controllo u(k)
0 10 20 30 40 50 60 -5 0 5
10 15 Andamento yd, y e ys
0 10 20 30 40 50 60 -20 -10
0 10 20 Andamento x1 e x2
0 10 20 30 40 50 60 -20 -10
0 10 20 Azione di controllo u(k)
Data Sampling in MIMO Systems

Control of Digital Systems
Automatic Control & System Theory 54 G. Palli (DEI)
AUTOMATIC CONTROL AND SYSTEM THEORY
CONTROL OF DIGITAL SYSTEMS
THE END