bayes minimum error and minimum risk (multiple classes)web.khu.ac.kr/~tskim/patternclass lec note...
TRANSCRIPT

KHU-BME
Pattern Classification
Lecture 09
1
Bayes Minimum Error and Minimum Risk (Multiple Classes)
Bayes Minimum Error – Multiple Classes
P(Si|x) > P(Sj|x) for all j¹i => x Î Si
p(x|Si)P(Si) > p(x|Sj)P(Sj) for all j¹i => x Î Si
A Set of Discriminant functions: gi(x) = p(x|Si)P(Si)
Bayes Minimum Risk – Multiple Classes
R(Sk|x) = å=
K
iiki xSPC
1)|(
Modified conditional loss:
Rc(Sk|x)= )()|(1
i
K
iiki SPSxPCå
=
If Rc(Si|x) < Rc(Sj|x) for all j¹i, => x Î Si
Discriminant function
gk(x) = -Rc(Sk|x) why multiply (-) ? to make gi(x)> gj(x)
Maximum discriminant function will correspond to the minimum conditional risk.
Rc(Sk|x) =
úúú
û
ù
êêê
ë
é
kkCC
CC
...
...
21
1211
úúú
û
ù
êêê
ë
é
...)()|()()|(
22
11
SPSxpSPSxp
- So far DHS 2.1, 2.2, and 2.4.1 covered

KHU-BME
Pattern Classification
Lecture 09
2
Special Cases (Multi-class Risk)
1. Symmetric 0-1 cost function (DHS 2.3)
Cki=1-dik=0 if i=k,
= 1 if i¹k = 1, = ; = 0, ≠ Called zero-one loss function
C=
úúúúúú
û
ù
êêêêêê
ë
é
0111...
11011111011...1110
This loss function assigns no loss to a correct decision, and assigns a unit loss to
any error: thus, all errors are equally costly.
Rc(Sk|x)= å=
K
iiiki SPSxPC
1
)()|(
=å=
K
iii SPSxp
1
)()|( -å=
K
iiiik SPSxp
1
)()|(d
Rc=p(x) – p(x|Sk)P(Sk)
So minimize Rc => maximize p(x|Sk)P(Sk)
ð Bayes minimum error
ð gk(x)=p(x|Sk)P(Sk)

KHU-BME
Pattern Classification
Lecture 09
3
2. Diagonal Cost Function
Cki=îíì
¹=-ki
hi,0
k,i ,, hi>0
C=
úúú
û
ù
êêê
ë
é
--
-
3
2
1
hh
h
Rc(Sk|x)=[C][p(x|S1)P(S1), …]T
Rc(Sk|x)=-hk p(x|Sk)P(Sk)
Decision rule:
hkp(x|Sk)P(Sk) > hip(x|Si)P(Si) for all i¹k => x Î Sk
KHU-BME
Pattern Classification
Lecture 09
4
Summary of Bayes Decision Theory so far
1. Bayes Minimum Error Classifier
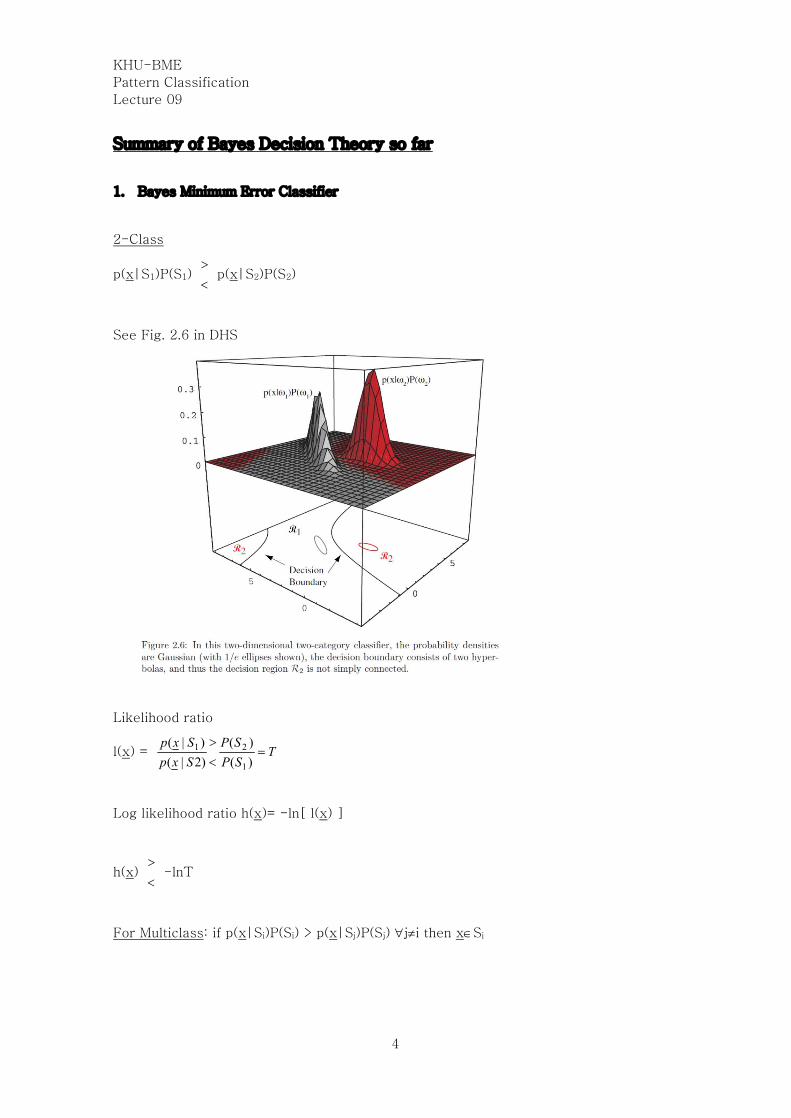
2-Class
p(x|S1)P(S1) <>
p(x|S2)P(S2)
See Fig. 2.6 in DHS
Likelihood ratio
l(x) = TSPSP
SxpSxp
=<>
)()(
)2|()|(
1
21
Log likelihood ratio h(x)= -ln[ l(x) ]
h(x) <>
-lnT
For Multiclass: if p(x|Si)P(Si) > p(x|Sj)P(Sj) "j¹i then xÎSi

KHU-BME
Pattern Classification
Lecture 09
5
2. Probability of Error Pe
2-class
Pe= òG2 p(x|S1) P(S1)dx + òG1 p(x|S2) P(S2)dx
For Multiclass
Pe=1- P{correct} <= This expression is much easier to understand.
P{correct}=åò=
G
K
iii xdSPSxp
i1)()|(
3. Bayes Minimum Risk Classifier
úúúú
û
ù
êêêê
ë
é
úúúú
û
ù
êêêê
ë
é
=
úúúú
û
ù
êêêê
ë
é
...
...)()|(.)()|(
...)|(
...)|(
22
11
21
1211
1
1
SPSxpSPSxp
C
CCC
xSR
xSR
kk
c
c
If Rc(Si|x)< Rc(Sj|x) for all j¹i => x Î Si or use gi(x)=-Rc(Si|x)
KHU-BME
Pattern Classification
Lecture 09
6
Classifiers (DHS 2.4)
Again, use a set of discriminant functions gi(x)
i.e., gi(x) > gj(x) for all j≠i.
Express gi(x) in terms of probabilites
gi(x)=p(Si|x)
gi(x)=p(x|Si)P(Si)
gi(x)=ln [p(x|Si)] + ln [P(Si)]

KHU-BME
Pattern Classification
Lecture 09
7
The Normal Density (DHS 2.5, p. 31)
- So far, general forms of density functions are considered
- Most widely studied density functions are the multivariate normal or
Gaussian density
- Why? Analytical tractability, most appropriate model
Univariate Density (DHS 2.5.1)
])(21exp[
21)( 2
sm
sp-
-=xxp
μ=expected value of x, average or mean
σ=standard deviation
Multivariate Density (DHS 2.5.2)
úûù
êëé -å--
å= - )()(
21exp
)2(1)( 1
2/12/mm
pxxxp T
d
μ=mean vector
å =covariance matrix
KHU-BME
Pattern Classification
Lecture 09
8
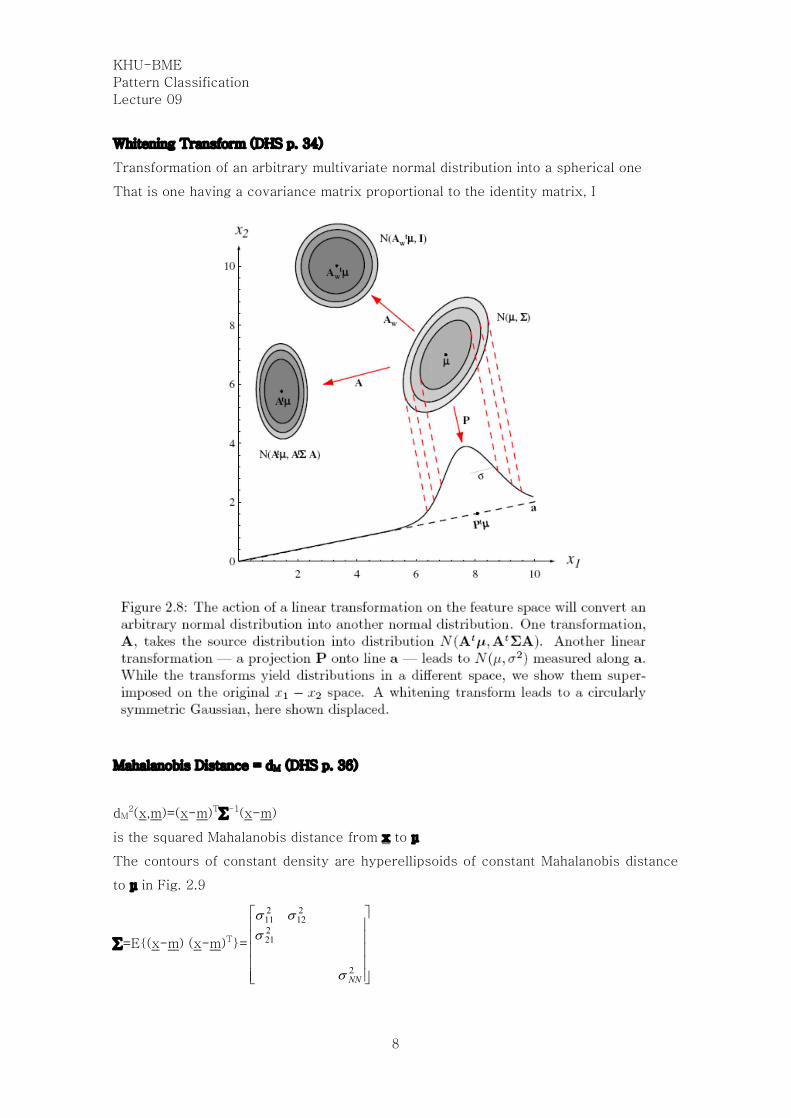
Whitening Transform (DHS p. 34)
Transformation of an arbitrary multivariate normal distribution into a spherical one
That is one having a covariance matrix proportional to the identity matrix, I
Mahalanobis Distance = dM (DHS p. 36)
dM2(x,m)=(x-m)Tå-1(x-m)
is the squared Mahalanobis distance from x to μ
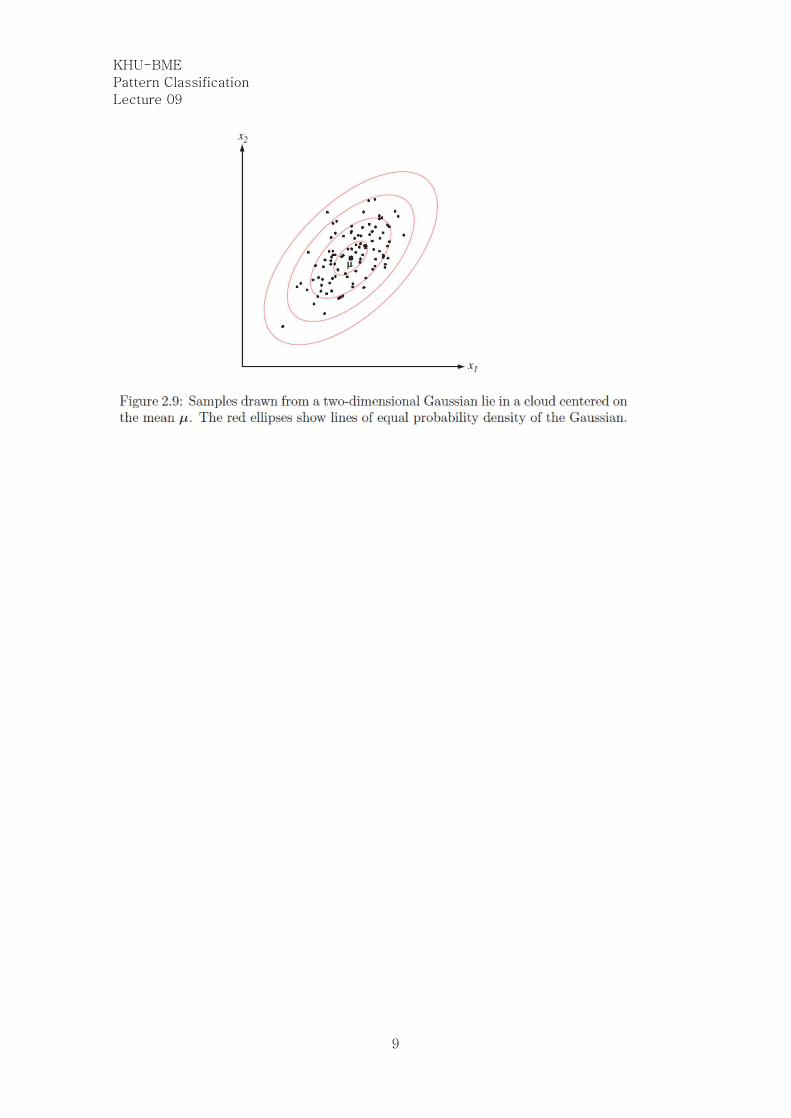
The contours of constant density are hyperellipsoids of constant Mahalanobis distance
to μ in Fig. 2.9
å=E{(x-m) (x-m)T}=
úúúúú
û
ù
êêêêê
ë
é
2
221
212
211
NNs
sss
KHU-BME
Pattern Classification
Lecture 09
9

KHU-BME
Pattern Classification
Lecture 09
10
Discriminant Functions for the Normal Density (DHS 2.6, p. 36)
The minimum error rate classification can be done using the discriminant functions:
gi(x)=ln [p(x|Si)] + ln [P(Si)]
If p(x|Si)=N(μi,∑i)
)(lnln212ln
2)()(
21)( 1
iiiiT
ii SPdxxxg +S---S--= - pmm (DHS Eq. (49) p. 36)
Let’s examine this discrimination function and resulting classification for three special
cases.
Case 1: Same s (DHS 2.6.1)
If å=s2I=
úúúúú
û
ù
êêêêê
ë
é
2
2
2
...s
ss
å-1=(1/s2)I
dM2(x,m)=(1/s2)(x-m)T(x-m)= (1/s2) dE
2(x,m)
dE: Euclidean distance
)(ln2
)( 2
2
ii
i SPxg +-
-=s
μx
Since )()(2i
Tii μxμxμx --=-
)(ln]2[2
1)( 2 iiTi
Ti
Ti SPg ++--= μμxμxxx
s= 1++ n
Ti wxw
where ii μw 21s
= , )(ln2
121 ii
Tin SPw +-=+ μμ
s
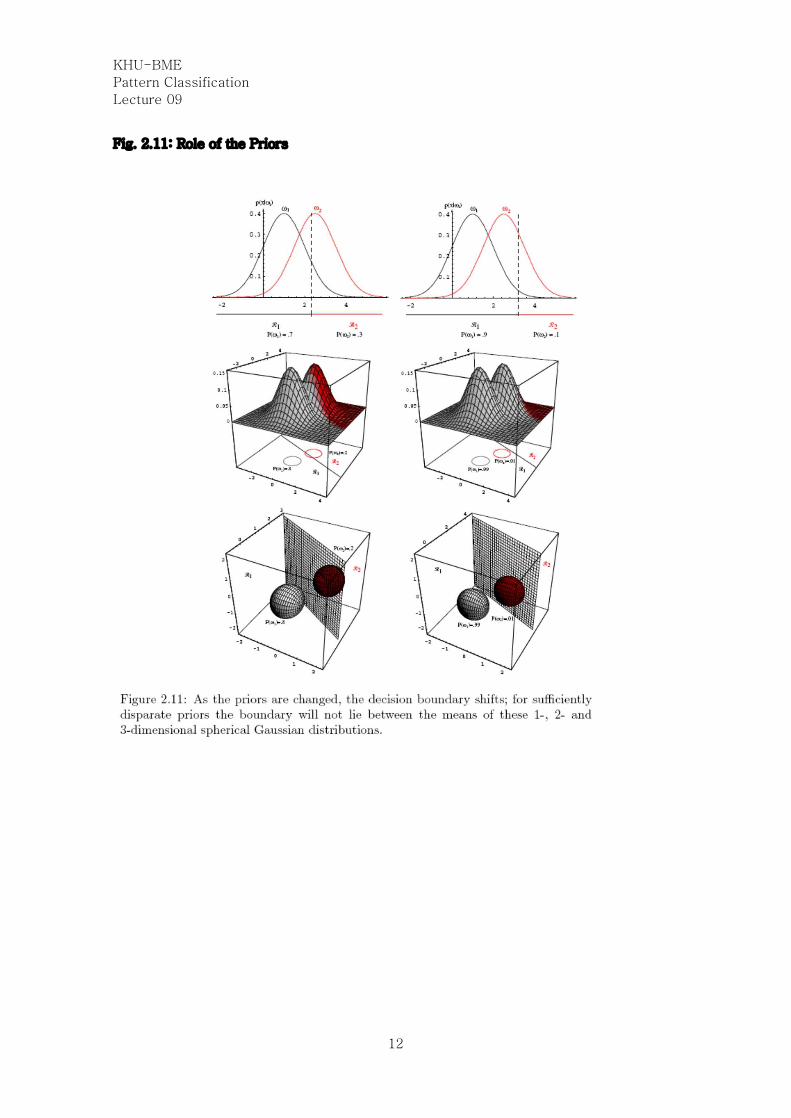
This equation shows that squared distance 2
ix m- is normalized by the variance and
offset by lnP(Si). That is if x is equally near two different mean vectors, the optimal
decision favors the a priori more likely category.

KHU-BME
Pattern Classification
Lecture 09
11
Fig. 2.10: Equal Covariances
- Hyperspheres
- Radius scaled by s
KHU-BME
Pattern Classification
Lecture 09
12
Fig. 2.11: Role of the Priors

KHU-BME
Pattern Classification
Lecture 09
13
Case 2: Different s (DHS 2.6.2)
If å=
úúúúú
û
ù
êêêêê
ë
é
2
222
211
...
NNs
ss
å-1=
úúúúú
û
ù
êêêêê
ë
é
2
222
211
/1...
/1/1
NNs
ss
dM2(x,m)= (x-m)Tå-1(x-m) =å
=
N
i 1(1/sii
2)(xi-mi)2
(ith term of dE is scaled by sii)
For the 2-D Case
dM2=(x1-m1)
2/s112 + (x2-m2)
2/s222
)(ln)()(21)( 1
iiT
ii SPxxxg +-å--= - mm
- To classify a feature vector x, measure the squared Mahalanobis distance
from x to each of the mean vectors, and assign x to the category of the
nearest mean.
- Classifier becomes linear and decision boundaries become hyperplanes.

KHU-BME
Pattern Classification
Lecture 09
14
Fig. 2.12
- Hyperellipsoids
- Axes parallel to coordinate axes.
- Note the effect of priors.

KHU-BME
Pattern Classification
Lecture 09
15
Fig. 2.13
- No simple decision regions for Gaussians with unequal variance

KHU-BME
Pattern Classification
Lecture 09
16
Case 3: If åi=general or arbitrary (DHS 2.6.3)
If the covariance matrices are different for each category, the resulting discriminant
functions are inherently quadratic
wxmxxxg iiiT
i +S+S-= -- 11
21)(
)(lnln21
21 1
iiiiTi SPmmw +S-S-= -
(DHS Eqs. (66)-(69))
å=
úúúúú
û
ù
êêêêê
ë
é
2
222
221
212
211
...
NNs
ssss
dM2(x,m)= (x-m)Tå-1(x-m)
apply orthonormal transformation (rotate basis)
x’=ETx
å’=ETåE=L=diagonal
ð hyperellipsoids (axes rotated)
2-D Case
2'22
222
2'11
2112 )()(
ss
mxmxdM-
+-
=
KHU-BME
Pattern Classification
Lecture 09
17
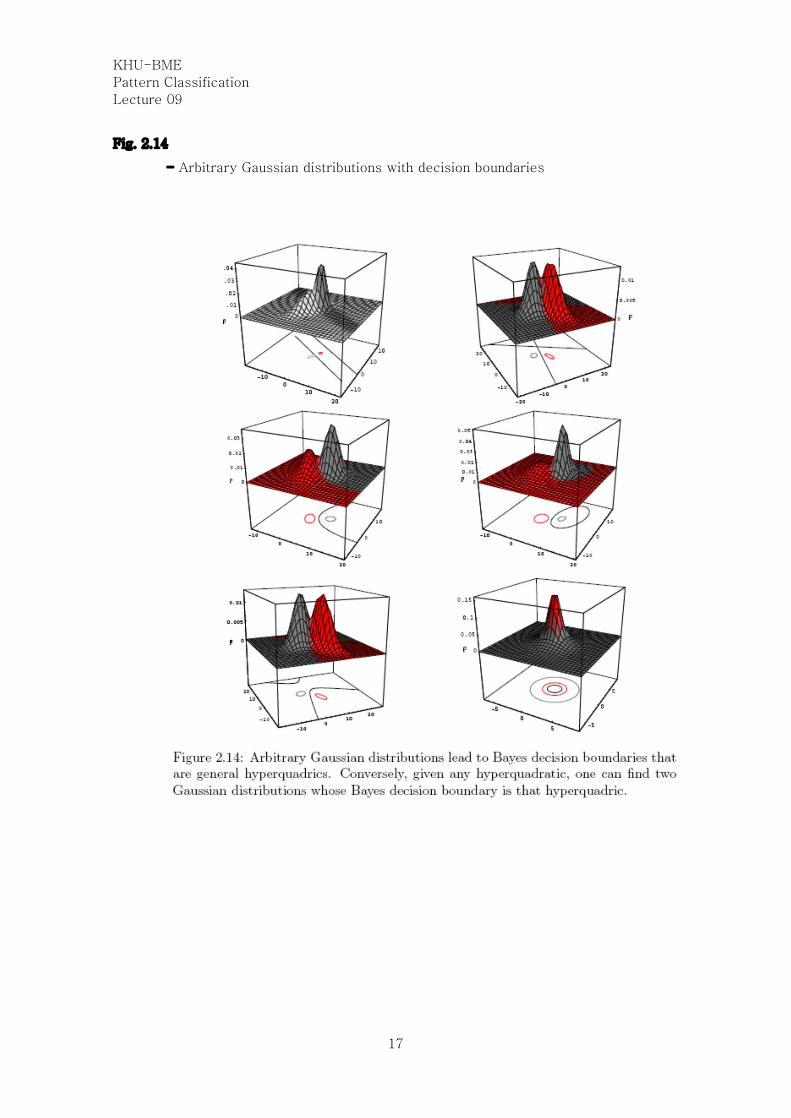
Fig. 2.14
- Arbitrary Gaussian distributions with decision boundaries

KHU-BME
Pattern Classification
Lecture 09
18
Fig. 2.15
- Arbitrary 3-D Gaussian distributions with decision boundaries
KHU-BME
Pattern Classification
Lecture 09
19
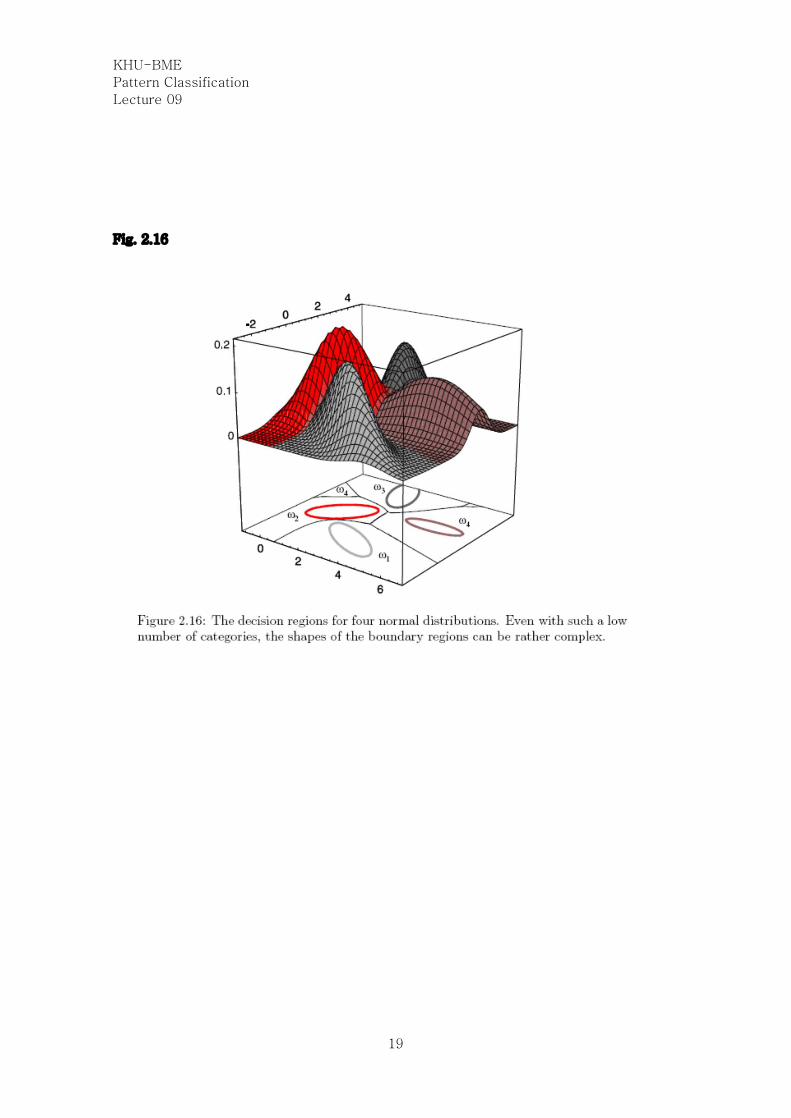
Fig. 2.16