boe-bot by: jonathan baker gabby garcia. boe-bot servo motors to control each wheel independently...
TRANSCRIPT

BOE-BOT
By: Jonathan Baker
Gabby Garcia

BOE-BOT
• Servo motors to control each wheel independently
• Castor wheel in rear for stability
• Aluminum Chassis• BASIC Stamp 2
microcontroller• SayIt Module• IR Sensors• Runs off 4 AA batteries
Front view of BOE-BOT Rear view of BOE-BOT

BASIC Stamp 2
• BASIC Stamp 2 is a 24-pin DIP• 20 MHz processor speed• 32 Bytes of RAM• BASIC Stamp 2 Editor used to
write and compile program• PBASIC is language used for
programming• USB to serial adapter used to
transfer code to robot

SayIt Module
• Parallax voice recognition 10-pin SIP module
• 32 speaker dependent (SD) commands
• SayIt GUI serves as interface for programming the user definable commands
Front view of SayIt module Rear view of SayIt module
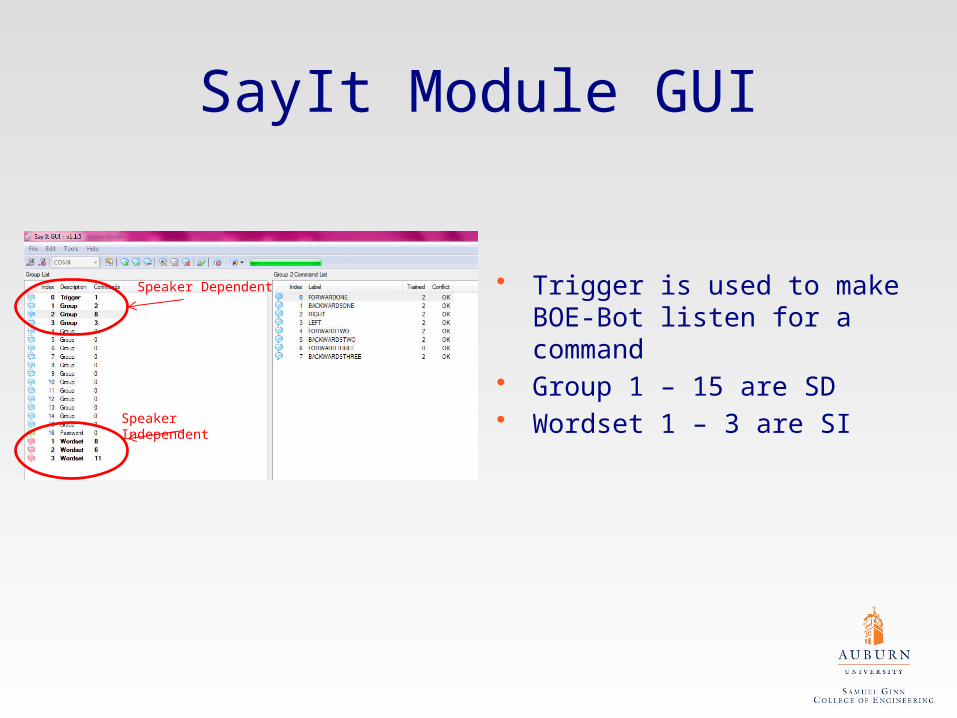
SayIt Module GUI
• Trigger is used to make BOE-Bot listen for a command
• Group 1 – 15 are SD • Wordset 1 – 3 are SI
Speaker Dependent
Speaker Independent

Infrared Detectors
• 4 pairs of IR detectors• IR LEDs emit signal at 940 nm
at a rate of 38.5 kHz• Frequency of signal is specified
in the code• IR receivers have electronic
filter that only allows signals with this frequency
IR Detector Circuit

Infrared Detector
• Heat shrink used as shields to focus the IR signal
• For near sighted robot use larger resistor value to decrease current
• Opposite for a far sighted robot
Actual IR Detector Circuit


Questions?