calculo de actuadores neumaticos
DESCRIPTION
Formulas para la seleccion de actuadores con respecto a tus necesidades.TRANSCRIPT

INGENIERÍA MECÁNICA
Materia:
Automatización Industrial
Semestre – Grupo - Sistema:
7° Semestre – Grupo “A” - Escolarizado
Producto Académico:
ACTUADORES
Presenta:
Erika María Toscano Arias.
Docente:
Ing. Josimar Muñoz Delgado
MEDELLÍN DE BRAVO, VER. Agosto - Enero 2016
INSTITUTO TECNOLÓGICO SUPERIOR DE ALVARADO – Campus Medellín

ACTUADORES
Erika ma. toscano arias. 2

CONTENIDOOBJETIVO......................................................................................................................................4
INTRODUCCIÓN.........................................................................................................................5
2. Actuadores............................................................................................................................6
2.1 Actuadores Neumáticos e Hidráulicos............................................................6
2.2 Calculo de actuadores Hidráulicos y Neumáticos..................................15
2.3 Selección de actuadores......................................................................................19
2.4 Determinación de la potencia y rendimiento en los motores hidráulicos y neumáticos..............................................................................................20
CONCLUSIÓN............................................................................................................................22
BIBLIOGRAFIA.........................................................................................................................23
Erika ma. toscano arias. 3

OBJETIVO.Que el alumno comprenda el concepto de actuadores, así como su clasificación y diferencia entre actuadores neumáticos e hidráulicos, de igual manera el calculo de ellos así como su selección y su determinación.
Erika ma. toscano arias. 4

INTRODUCCIÓN.
Un actuador es un dispositivo inherentemente mecánico cuya función es proporcionar fuerza para mover o “actuar” otro dispositivo mecánico. Los actuadores tienen como misión generar el movimiento de los elementos del robot según las órdenes dadas por la unidad de control. Los actuadores utilizados en robótica pueden emplear energía neumática, hidráulica o eléctrica. Cada uno de estos sistemas presenta características diferentes, siendo preciso evaluarlas a la hora de seleccionar el tipo de actuador más conveniente, las características a considerar son entre otras:
Potencia. Controlabilidad. Peso y volumen. Precisión. Velocidad. Mantenimiento. Coste.
Se clasifican en tres grandes grupos, según la energía que utilizan:
Neumáticos. Hidráulicos. Eléctricos.
Los actuadores neumáticos el aire comprimido como fuente de energía y son muy indicados en el control de movimientos rápidos, pero de precisión limitada.
Los motores hidráulicos son recomendables en los manipuladores que tienen una gran capacidad de carga, junto a una precisa regulación de velocidad.
Los motores eléctricos son los más utilizados, por su fácil y preciso control, así como por otras propiedades ventajosas que establece su funcionamiento, como consecuencia del empleo de la energía eléctrica.
Erika ma. toscano arias. 5

2. Actuadores.2.1 Actuadores Neumáticos e Hidráulicos.
Actuadores Neumáticos.
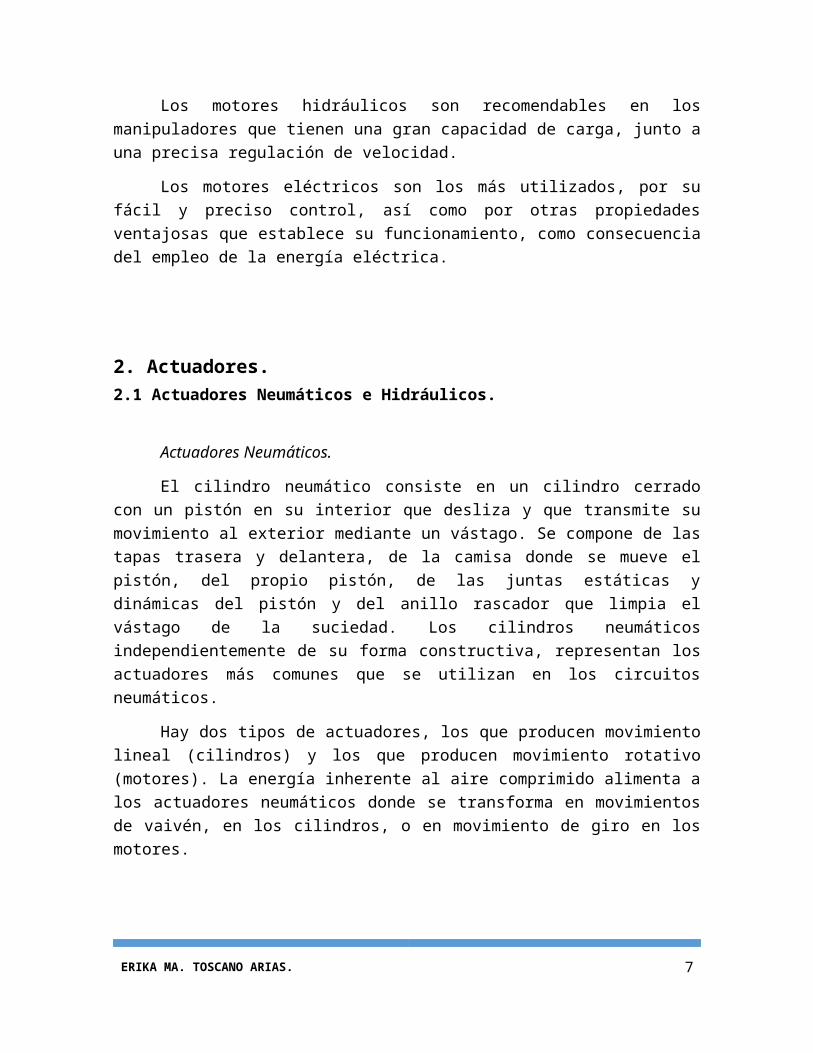
El cilindro neumático consiste en un cilindro cerrado con un pistón en su interior que desliza y que transmite su movimiento al exterior mediante un vástago. Se compone de las tapas trasera y delantera, de la camisa donde se mueve el pistón, del propio pistón, de las juntas estáticas y dinámicas del pistón y del anillo rascador que limpia el vástago de la suciedad. Los cilindros neumáticos independientemente de su forma constructiva, representan los actuadores más comunes que se utilizan en los circuitos neumáticos.
Hay dos tipos de actuadores, los que producen movimiento lineal (cilindros) y los que producen movimiento rotativo (motores). La energía inherente al aire comprimido alimenta a los actuadores neumáticos donde se transforma en movimientos de vaivén, en los cilindros, o en movimiento de giro en los motores.
En los actuadores lineales encontramos dos tipos fundamentales:
Cilindro de simple efecto: sólo pueden efectuar trabajo en una dirección.
Cilindro de doble efecto: efectúan trabajo en ambas direcciones.
Cilindro de simple efecto de émbolo.
El vástago puede estar replegado o extendido inicialmente, tienen un resorte de recuperación de posición, al suministrarle aire comprimido el émbolo modifica su posición y cuando se purga el aire, el muelle recupera la posición inicial del émbolo. Debido a la longitud del muelle se utilizan cilindros de simple efecto con carreras de hasta 100 mm.
Erika ma. toscano arias. 6
Estos cilindros sólo pueden efectuar trabajo en una dirección, el que realiza el aire comprimido, mientras que el movimiento debido al muelle solamente sirve para recuperar la posición inicial, por ello es apropiado para tensar, expulsar, introducir, sujetar, etc.
Cilindro de simple efecto de membrana.
Una membrana de goma desempeña las funciones de émbolo. La placa de sujeción asume la función del vástago y está unida a la membrana, el retroceso se realiza por tensión interna de la membrana. Este tipo cilindros sólo pueden efectuar carreras muy cortas, por lo que se emplean para remachar, estampar, y sobre todo sujetar.
Erika ma. toscano arias. 7

Cilindro de simple efecto de membrana arrollable.
La membrana tiene forma de vaso, cuando se introduce aire comprimido la membrana se desarrolla en la pared interna del cilindro, presenta muy poco rozamiento y son muy estancos, su carrera es muy corta.
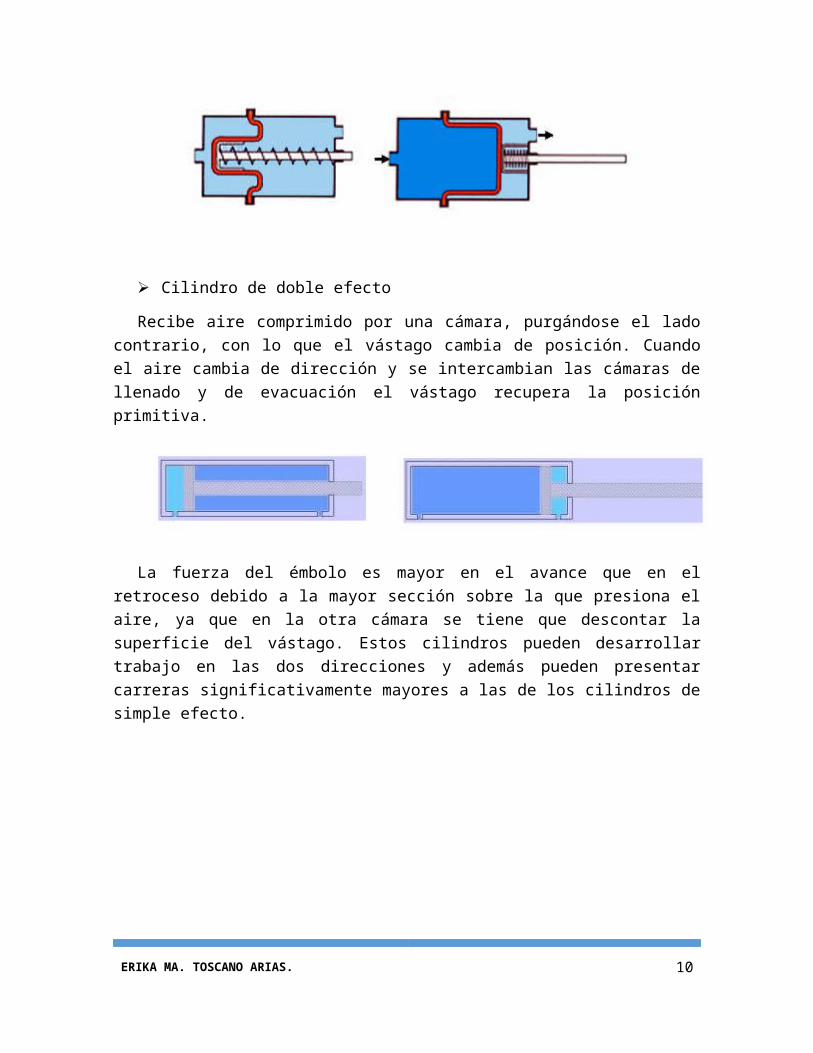
Cilindro de doble efecto
Recibe aire comprimido por una cámara, purgándose el lado contrario, con lo que el vástago cambia de posición. Cuando el aire cambia de dirección y se intercambian las cámaras de llenado y de evacuación el vástago recupera la posición primitiva.
La fuerza del émbolo es mayor en el avance que en el retroceso debido a la mayor sección sobre la que presiona el aire, ya que en la otra cámara se tiene que descontar la superficie del vástago. Estos cilindros pueden desarrollar trabajo en las dos direcciones y además pueden presentar carreras significativamente mayores a las de los cilindros de simple efecto.
Erika ma. toscano arias. 8

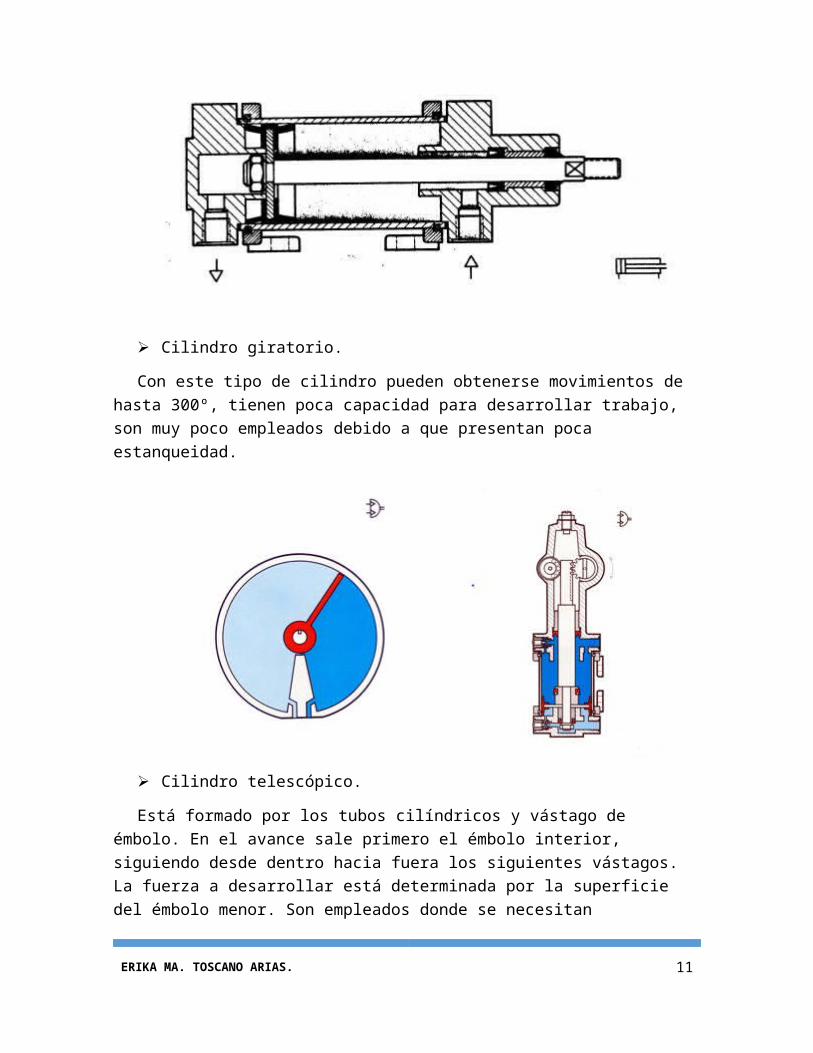
Cilindro giratorio.
Con este tipo de cilindro pueden obtenerse movimientos de hasta 300º, tienen poca capacidad para desarrollar trabajo, son muy poco empleados debido a que presentan poca estanqueidad.
Cilindro telescópico.
Está formado por los tubos cilíndricos y vástago de émbolo. En el avance sale primero el émbolo interior, siguiendo desde dentro hacia fuera los siguientes vástagos. La fuerza a desarrollar está determinada por la superficie del émbolo menor. Son empleados donde se necesitan importantes longitudes de elevación con una base cilíndrica de reducidas dimensiones, por ejemplo en plataformas elevadoras, presentan problemas de pandeo.
Erika ma. toscano arias. 9
Cilindro de doble vástago.
Tienen vástagos en ambos lados, en este caso la fuerza que desarrollan en ambas direcciones es la misma, además son capaces de soportar ligeros esfuerzos laterales.
Actuadores de movimiento rotativo.
Los actuadores de movimiento rotativo (motores), se usan menos que los lineales ya que en general los motores eléctricos hacen esta función de forma más eficaz. A pesar de esto en determinadas situaciones (de exigencia de más limpieza o de peligrosidad por peligro de explosión, etc.) también son utilizados en muchos procesos productivos.
Erika ma. toscano arias. 10
Motor de émbolo radial.
Por medio de cilindros de movimiento alternativo, el aire comprimido acciona a través de una excéntrica o de una biela el cigüeñal del motor, su potencia depende de la presión de alimentación, del número de émbolos y de la superficie y la velocidad de movimiento de estos.
Motor de aletas.
Consta de un rotor excéntrico provisto de unas ranuras homogéneamente repartidas, en ellas se deslizan unas aletas abatibles que son empujadas contra la pared interior del motor. Estos motores tienen una gama de velocidad de entre 3000 y 9000 r.p.m. para potencias de hasta 25 CV.
Actuadores Hidráulicos.
Estos actuadores se basan, para su funcionamiento, en la presión ejercida por un líquido, generalmente un tipo de aceite. Las maquinas que normalmente se encuentran conformadas por actuadores hidráulicos tienen mayor velocidad y mayor resistencia mecánica y son de gran tamaño, por ello, son usados para aplicaciones donde requieran de una carga pesada.
Cualquier tipo de sistema hidráulico se encuentra sellado herméticamente a modo que no permita, de ninguna manera, derramar el líquido que contiene, de lo contraria se corre un gran riesgo. Los actuadores hidráulicos requieren demasiado equipo para suministro de energía, así como de mantenimiento periódico.
Erika ma. toscano arias. 11

Ventajas de los actuadores hidráulicos
Las ventajas que presentan los actuadores de esta naturaleza son:
Altos índices entre potencia y carga. Mayor exactitud. Respuesta de mayor frecuencia. Desempeño suave a bajas velocidades. Amplio rango de velocidad. Produce más fuerza que un sistema neumático de mismo tamaño.
Desventajas de los actuadores hidráulicos
Las desventajas de este sistema son que debido a las elevadas presiones a las que se trabajan propician la existencia de fugas de aceite a lo largo de la instalación. Además, estas instalaciones suelen ser más complicadas que las necesarias para actuadores neumáticos y mucho más que para los eléctricos, necesitando de equipos de:
Filtrado de partículas. Eliminación de aire. Sistemas de refrigeración. Unidades de control de distribución.
Aplicaciones de los actuadores hidráulicos
Las principales aplicaciones se encuentran en máquinas troqueladoras, en cargadores y en maquinarias pesada para obras civiles. Este sistema de actuadores se divide en tres grandes grupos:
Cilindro hidráulico. Motor hidráulico. Motor hidráulico de oscilación.
Cilindro hidráulico
De acuerdo con su función podemos clasificar a los cilindros hidráulicos en 2 tipos:
De efecto simple: se utiliza fuerza hidráulica para empujar y una fuerza externa, diferente, para contraer.
Erika ma. toscano arias. 12

De acción doble: se emplea la fuerza hidráulica para efectuar ambas acciones.
Cilindro de presión dinámica
Lleva la carga en la base del cilindro. Los costos de fabricación por lo general son bajos ya que no hay partes que resbalen dentro del cilindro.
Cilindro de efecto simple
Una barra es colocada en un extremo del pistón, cuando la presión es ejercida en la parte contraria al extremo del pistón donde está la barra, esta sube hasta donde la presión lo empuje, ejerciendo una fuerza sobre la barra de contracción, después la barra es regresada a la posición inicial por la simple acción de resortes o de la gravedad. La carga solo puede colocarse en un extremo del cilindro.
Cilindro de efecto doble
La carga puede colocarse en cualquiera de los lados del cilindro. Se genera un impulso horizontal debido a la diferencia de presión entre los extremos del pistón cuando el líquido entra en este.
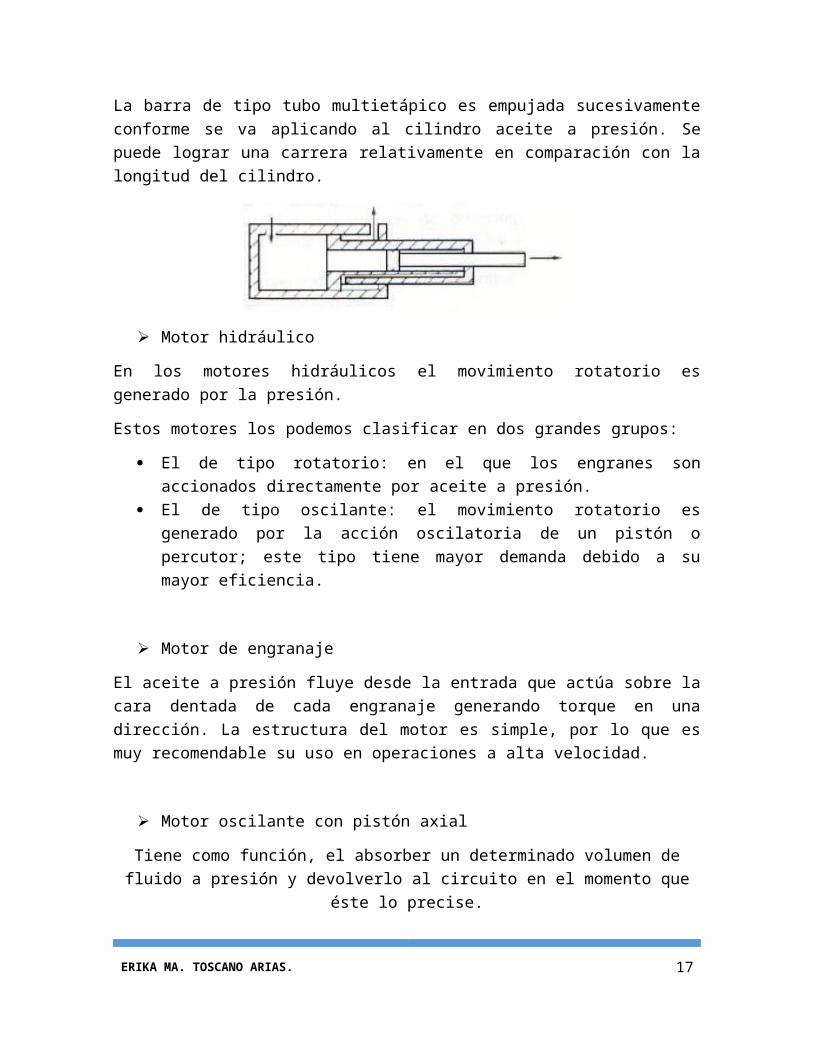
Cilindro telescópico
Erika ma. toscano arias. 13
La barra de tipo tubo multietápico es empujada sucesivamente conforme se va aplicando al cilindro aceite a presión. Se puede lograr una carrera relativamente en comparación con la longitud del cilindro.
Motor hidráulico
En los motores hidráulicos el movimiento rotatorio es generado por la presión.
Estos motores los podemos clasificar en dos grandes grupos:
El de tipo rotatorio: en el que los engranes son accionados directamente por aceite a presión.
El de tipo oscilante: el movimiento rotatorio es generado por la acción oscilatoria de un pistón o percutor; este tipo tiene mayor demanda debido a su mayor eficiencia.
Motor de engranaje
El aceite a presión fluye desde la entrada que actúa sobre la cara dentada de cada engranaje generando torque en una dirección. La estructura del motor es simple, por lo que es muy recomendable su uso en operaciones a alta velocidad.
Motor oscilante con pistón axial
Tiene como función, el absorber un determinado volumen de fluido a presión y devolverlo al circuito en el momento que éste lo precise.
Erika ma. toscano arias. 14

Motor con pistón eje inclinado
El aceite a presión que fluye desde la entrada empuja el pistón contra la brida y la fuerza resultante en la dirección radial hace que el eje y el bloque del cilindro giren en la dirección de la flecha. Este tipo de motor es muy conveniente para usos a alta presión y a alta velocidad. Es posible modificar su capacidad al cambiar el ángulo de inclinación del eje.
2.2 Calculo de actuadores Hidráulicos y Neumáticos.
Para calcular la fuerza que ejerce el vástago de un cilindro en sus carreras de avance o retroceso se debe partir de la presión de trabajo del aire comprimido. La fuerza desarrollada depende de la superficie útil
Erika ma. toscano arias. 15

del actuador, que será diferente según se trate de cilindros de simple o de doble efecto.
Cilindros de simple efecto
En este tipo de cilindros la presión del aire se ejerce sobre toda la superficie del émbolo. Al determinar la fuerza que realiza el cilindro, hemos de tener en cuenta que el aire debe vencer la fuerza de empuje en sentido opuesto que realiza el muelle.
En estos cilindros solamente se ejerce fuerza en el sentido de avance, es decir la fuerza que realiza el aire comprimido, cuando el cilindro regresa a su posición estable lo hace por medio de la fuerza de empuje del resorte, que exclusivamente sirve para recuperar la posición del vástago, pero es incapaz de desarrollar ningún tipo de trabajo mecánico.
A efectos de cálculo se interpreta que la fuerza del resorte es del orden del 10% de la fuerza neumática.
Sección del émbolo:
Volumen:
Cilindros de doble efecto.
Estos cilindros desarrollan trabajo neumático tanto en la carrera de avance como en la de retroceso, lo que sucede es que la fuerza es
distinta en cada uno de los movimientos, porque el aire comprimido en
Erika ma. toscano arias. 16
el movimiento de avance actúa sobre toda la superficie del émbolo, mientras que en el retroceso solamente lo hace sobre la superficie útil, que resulta de restar a la superficie del émbolo la del vástago.
Sección en el avance:
Sección retroceso:
Volumen:
Donde:
Cálculo de la fuerza del émbolo.
La fuerza teórica del émbolo se calcula con la siguiente fórmula:
F=p*S
Erika ma. toscano arias. 17

Donde:
S=Superficie útil.
p=Presión del aire. Medida en bar.
Para los cálculos neumáticos se admiten las siguientes equivalencias:
1bar=105Pa=1Atm=1Kp/cm2
En la práctica es necesario conocer la fuerza real que realiza el émbolo. Para calcularla hay que tener en cuenta los rozamientos que existen, lo que provoca unas pérdidas sobre la fuerza teórica. En condiciones normales de servicio (presiones de 4 a 8 bar) se puede considerar que las fuerzas de rozamiento suponen entre un 5 a un 15% de la fuerza teórica calculada.
Cilindro de simple efecto:
Cilindro de doble efecto:
Cálculo del consumo de aire
Se debe tener en cuenta el volumen del cilindro y el número de veces que se repite el movimiento en la unidad de tiempo, generalmente se mide en ciclos por minuto.
En el cálculo del consumo de aire se tiene en cuenta la presión de trabajo, por lo que se obtiene el consumo de aire comprimido, para conocer el consumo de aire atmosférico se parte del consumo de aire a la presión de trabajo y se aplica la ley de Boyle-Mariotte.
Erika ma. toscano arias. 18

Longitud de carrera
La longitud de carrera en cilindros neumáticos no debe superar los 2000 mm. Para émbolos de gran tamaño y carrera larga, el sistema neumático no resulta económico por el elevado consumo de aire que requiere.
Cuando la carrera es muy larga, el esfuerzo mecánico del vástago y de los cojinetes de guía es demasiado grande. Para evitar el riesgo de pandeo, si las carreras son grandes deben adoptarse vástagos de diámetro superior a lo normal, desaconsejándose su uso.
2.3 Selección de actuadores.
La correcta selección de un actuador para una línea de proceso es fundamental, ya que si no se selecciona bien esto repercutirá en el proceso de producción.
Los pasos que se deben seguir ante el proceso de selección son:
a) Identificar qué se quiere automatizar, por ejemplo:1. Válvula de bola2. Válvula de mariposa3. Válvula de compuerta4. Válvula de macho
b) Posteriormente se debe determinar si se quiere automatizar:1. Neumáticamente2. Eléctricamente3. Hidráulicamente
c) Determinar el toque de la válvula y del actuador para que la válvula abra en los tiempos requeridos y no se seleccione un actuador muy grande o muy chico.
d) Tomar en cuenta los siguientes parámetros para asegurarse de la correcta selección de un actuador eléctrico:1. Voltaje2. Maniobra en operación (torque)3. Tiempo de maniobra4. Ángulo de maniobra5. Temperatura
Erika ma. toscano arias. 19

6. Conectores7. Peso
e) La alineación eléctrica cuentan con un mando manual y con una pantalla de Led que informa el status que está teniendo el actuador ya que cuentan con accesorios adicionales como tarjeta servo. Esta alineación eléctrica puede ser:
1. Alterna2. Continua3. Indistinta
2.4 Determinación de la potencia y rendimiento en los motores hidráulicos y neumáticos
Selección del motor neumático
Para calcular un motor de aire se precisan dos datos de los tres siguientes:
1- Potencia requerida 2- Velocidad en RPM necesaria para arrastrar la carga
determinada 3- Par de trabajo expresado en Newton metro [Nm]
La potencia requerida viene determinada por la fórmula:
𝑃 𝐾𝑤 = π ∙ Par [N ∙m ]∙ RPM
30 =
0.1046 ∙Par [N ∙m ] ∙RPM1000
Una vez calculada la potencia, se consultan las curvas de rendimiento de cada motor y se selecciona el motor cuya potencia de salida esta próxima al punto de trabajo.
Calculo de la potencia de los motores hidráulicos
Las variables que permiten calcular cuales han de ser las características del motor son:
Erika ma. toscano arias. 20

Par: Par de rotación generado por el motor para convertir la potencia del motor en fuerza mecánica por medio de la rotación del eje.
Desplazamiento: Caudal del fluido necesario para alcanzar una determinada velocidad de rotación.
Presión de operación: Presión a la que trabaja el motor.
Velocidad de operación : Velocidad a la que giran los componentes del motor.
Temperatura de operación: Temperatura a la cual el motor trabaja en forma segura y eficiente.
Viscosidad del fluido: Viscosidad del fluido de trabajo utilizado en el motor.
El volumen del fluido que es bombeado en cada revolución viene calculado por la geometría de las cámaras que transportan el aceite. Una bomba nunca desarrolla el volumen calculado o teórico del fluido. De modo que se usa un factor llamado rendimiento volumétrico que es la relación entre el caudal calculado con relación al real. Este rendimiento varía con la velocidad, la presión y la forma de construcción de la bomba.
Asimismo, el rendimiento mecánico tampoco es del 100% debido básicamente a la energía gastada en los rozamientos. De modo que se considera que el rendimiento global de una bomba hidráulica es el producto de su rendimiento volumétrico y el rendimiento mecánico.
Formulas:
𝑃 [𝐻𝑃] = Caudal [ gpm ] ∙(Alta presión−Baja presión)¿¿
𝑃 [𝑘𝑊]= Q [l /min ] ∙(Alta presión−Baja presión )¿¿
Erika ma. toscano arias. 21

CONCLUSIÓN.
Aprendimos que un actuador es un dispositivo capaz de transformar energía hidráulica, neumática o eléctrica en la activación de un proceso con la finalidad de generar un proceso.
De igual manera conocimos los tipos de actuadores los cuales se clasifican en Neumáticos e Hidráulicos así como su funcionamiento y la manera en que se realizan los cálculos de estos.
También hablamos sobre la selección de los actuadores en los cuales se debe seguir una serie de pasos ante el proceso de selección, así como la determinación de la potencia del rendimiento en los motores neumáticos e hidráulicos.
Erika ma. toscano arias. 22

BIBLIOGRAFIA.
http://educativa.catedu.es/44700165/aula/archivos/repositorio/4750/4917/html/2_actuadores_neumticos.html
http://cursos.aiu.edu/Sistemas%20Hidraulicas%20y%20Neumaticos/PDF/Tema%204.pdf
http://www.uhu.es/rafael.sanchez/ingenieriamaquinas/carpetaapuntes.htm/Trabajos%20IM%202009-10/Manuel%20Jesus%20Esacalera-Antonio%20Rodriguez-Actuadores%20Neumaticos.pdf
http://www.quiminet.com/articulos/los-5-pasos-mas-importantes-para-la-seleccion-de-un-actuador-48552.htm
Erika ma. toscano arias. 23