camera parameters extrinisic parameters define location and orientation of camera reference frame...
Post on 22-Dec-2015
226 views
TRANSCRIPT

Camera parameters
• Extrinisic parameters define location and orientation of camera reference frame with respect to world frame
• Intrinsic parameters define pixel coordinates of image point with respect to coordinates in camera reference frame

Homogenous coordinates
Add an extra coordinate and define equivalenceRelationship
(X,Y,Z) -> (wX, wY, wZ, w)
(x,y) -> (kx, ky, k)
Makes it possible to write the Perspective projection as a linear Transformation (matrix)(from projective space to projective plane)

Central projection
Z
Yfy
Z
Xfx
10100
000
000
Z
Y
X
f
f
w
v
u
w
vw
u
y
x
w
v
u
HC NHC

Scaled orthographic projection
fYyfXx
11000
000
000
Z
Y
X
f
f
w
v
u
w
vw
u
y
x
w
v
u
HC NHC




In a simpler notation
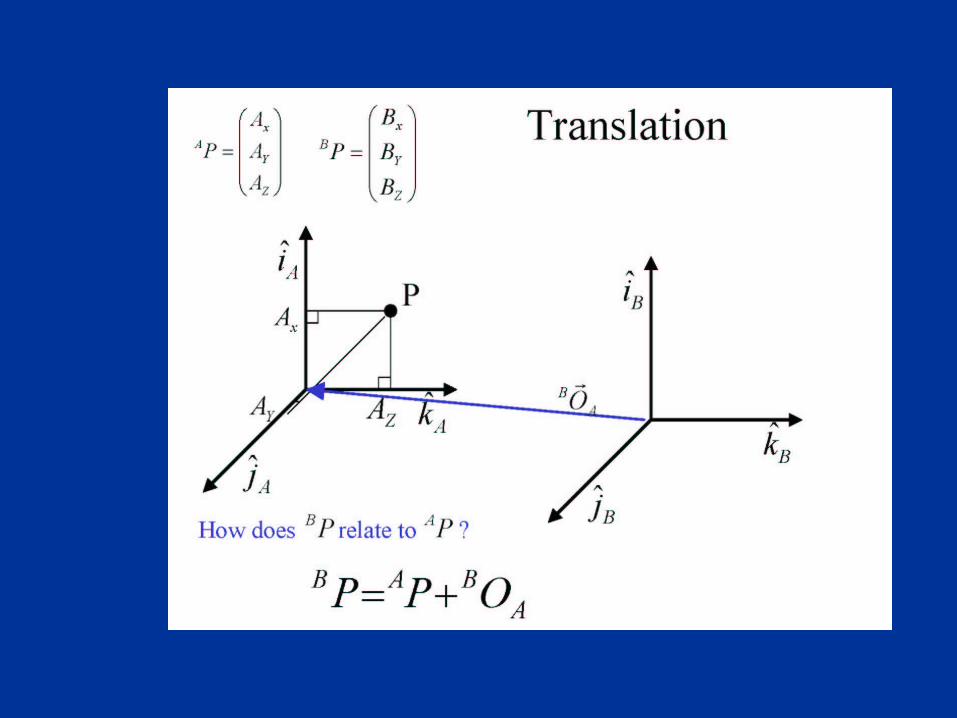
T describes the position of the origin of camera frame with respect to world frame
R describes the rotation which aligns the camera frame with the world frame
Pc = R(Pw – T)
(here –RT = BOA)
ABAB
AB OPRP

Translation and Rotation
)( TPRP wc
110001w
w
w
c
c
c
Z
Y
X
RTR
Z
Y
X

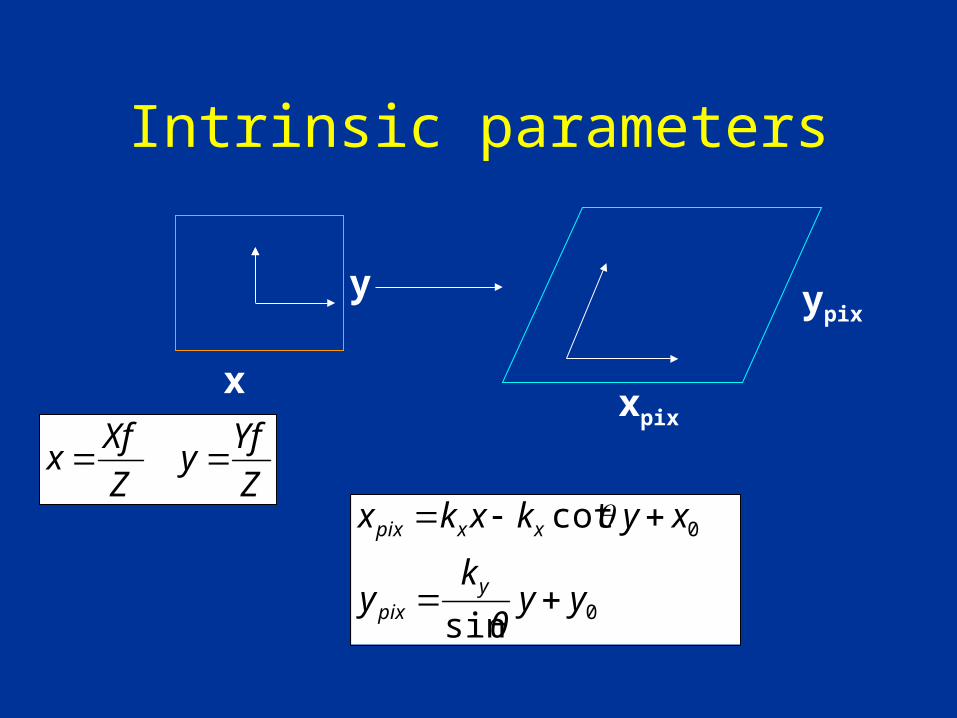
Intrinsic parameters
Z
Yfy
Z
Xfx
x
y
xpix
ypix
yky
xkx
ypix
xpix
Scaling

Intrinsic parameters
Z
Yfy
Z
Xfx
x
y
xpix
ypix
0
0
yyky
xxkx
ypix
xpix
Intrinsic parameters
Z
Yfy
Z
Xfx
x
y
xpix
ypix
0
0
sin
cot
yyθ
ky
xykxkx
ypix
xxpix

The internal calibration parameters
shear theis sin
sfk
ffkf yyxx
10100
00
0
0
0
c
c
c
y
x
Z
Y
X
yf
xsf
w
v
u
w
vy
w
ux pixpix

1
intw
w
w
ext Z
Y
X
MM
w
v
u
with
100
0int oy
ox
yf
xsf
M
TRrrr
TRrrr
TRrrr
MT
T
T
ext
2333231
2232221
1131211
MPp

MPp
TIMTIRMp |'| 33int
Properties of matrix M
• M has 11 degrees of freedom (5 internal 3 rotation, 3 translation parameters) , 3x4 matrix defined up to scale
•The 3x3 submatrix M’=MintR is non-singular (Mint is upper triangular, R is orthogonal -> essential QR decomposition)

Radial distortion
from lens distortion (pin cushioning effect)
Straight lines are not imaged straight
222
42
21 ....1)(
)()(
dd
dd
yxr
rkrkrL
rLyyrLxx
(significant error for cheap optics and short focal length)
x and xd
measured fromimage center

Radial calibration
2,
2,2,1 )()()( idi
iidi yyxxkkfMinimize
Using lines to be straight(x’,y’) is radial projection of (xd, yd) on straight line
),( yx
),( dd yx


Calibration Procedure
• Calibration target : 2 planes at right angle with checkerboard (Tsai grid)
• We know positions of corners of grid with respect to a coordinate system of the target
• Obtain from images the corners• Using the equations (relating pixel coordinates to
world coordinates) we obtain the camera parameters (the internal parameters and the external (pose) as a side effect)

Image Processing
• Canny edge detection
• Straight line fitting to detect long edges
• Intersection of lines to detect image corners
• Matching image corners and 3D checkerboard corners

Estimation procedure
• First estimate M from corresponding image points and scene points (solving homogeneous equation)
• Second decompose M into internal and external parameters
• Use estimated parameters as starting point to solve calibration parameters non-linearly.

1
intw
w
w
ext Z
Y
X
MM
w
v
u
PMp
.
.
.
..
..
..
3
2
1
T
T
T
m
m
m
M
Pm
Pm
w
vy
Pm
Pm
w
ux
3
2
3
1
0 PMpor
(homogeneous equation)

nnnnnnnnnn
nnnnnnnnnn
yZyZyXyZYX
xZxYxXxZYX
yZyYyXyZYX
xZxYxXxZYX
A
10000
00001
10000
00001
1111111111
1111111111
0Am
34
33
12
11
.
.
m
m
m
m
m
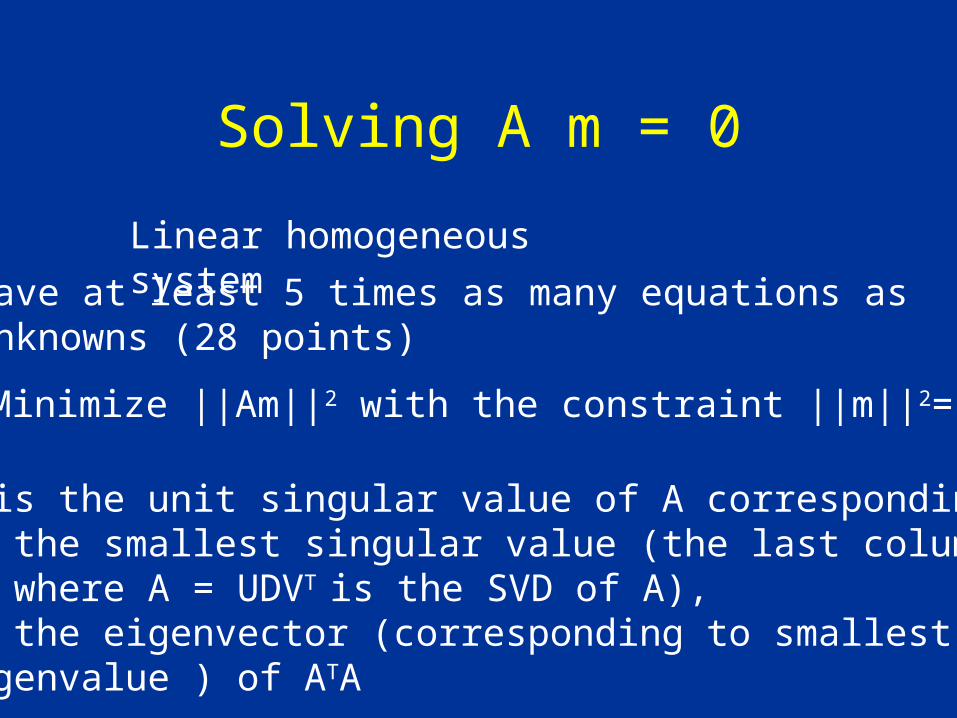
Solving A m = 0
Linear homogeneous system
Have at least 5 times as many equations as unknowns (28 points)
Minimize ||Am||2 with the constraint ||m||2=1
M is the unit singular value of A correspondingto the smallest singular value (the last column ofV, where A = UDVT is the SVD of A),or the eigenvector (corresponding to smallest eigenvalue ) of ATA
Finding camera translation
T~Let be the homogeneous representation of T
T~ is the null vector of M: 0
~ TM
0~
|3int TTIRM
Null vector is found using SVD( is the unit singular vector corresponding to the smallest singular value of M)T~
(position of camera center)

Finding camera orientation and internal parameters
• Left 3x3 submatrix of M is of the form M’= Mint R Mint upper triangular R orthogonal• Any nonsingular matrix can be decomposed into the product of an upper triangular and an orthogonal matrix (RQ factorization—here R refers to upper triangular and Q to orthogonal) (Similar to QR factorization)

RQ factorization of M’• Givens rotations
100
0''''
0''''
'0'
010
'0'
,
0
0
001
cs
sc
R
cs
sc
R
cs
scR zyx
To set M’32 to zero, solve equation
Thus:
03,32,3 msmc
2/123,3
22,3
2,3
2/123,3
22,3
3,3
)()( mm
ms
mm
mc
Multiply M’ by Rx ( such that term (3,2) is 0), then by, Ry (choosing c’, s’ such that term (3,1) is zero), then by Rz (with c’’, s’’ such that term (2,1) is zero)
RMRRRMMMRRRM Tx
Ty
Tzzyx intintint ''

Improving solution with nonlinear optimization
Find m using the linear constraint
Use as initialization for nonlinear optimization
||,||i
ii MPp
(Levenberg-Marquardt iterative minimization)

Algorithm described inMultiple View Geometry in Computer Vision(Hartley, Zisserman)