新原盛太郎 2015年1月 - konoie.comring oscillator...
TRANSCRIPT

発振器
新原盛太郎
2015年1月


i
序
このテキストは、発振器についてまとめたものである発振器に対し、多大な功績を残した黒川博士の論文についても述べている。発振器を研究しようとしている読者には、非常に役に立つ資料だと思う。
新原盛太郎


iii
目次
序 i
第 1章 発振器の概要 1
1.1 要求される性能・定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 発振器の種類 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 発振器の歴史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
第 2章 振幅・周波数の解析 5
2.1 利得の解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 発振の基本原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
第 3章 安定性 9
3.1 安定・不安定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2 発振器の安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3 安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
第 4章 雑音の解析 21
4.1 雑音の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
第 5章 PLL 25
5.1 PLLの基礎 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2 PLLにおける雑音 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
第 6章 KUROKAWAの方法 33
6.1 一般式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.2 同期発振 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.3 自由発振における雑音 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.4 同期発振器における雑音 . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.5 雑音同期信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.6 発振器の 1/ f 雑音 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
第 7章 ISFによる解析 43
7.1 初めに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.2 位相ジッタ- . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.3 発振振幅の影響 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49

iv 目次
7.4 Ring Oscillator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.5 差動 CMOS ring oscillators . . . . . . . . . . . . . . . . . . . . . . . . . . 56
第 8章 多次元の雑音空間 61
8.1 雑音空間の表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.2 多次元確立過程雑音による位相雑音 . . . . . . . . . . . . . . . . . . . . . 63
第 9章 設計法 65
9.1 回路設計の流れ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9.2 回路の選択 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9.3 定数の決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
付録 A 確立過程 69
A.1 確立過程の定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
A.2 確率過程の定理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
参考文献 79
索引 80

v
図目次
1.1 Colpitts回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Hartley回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 lattice回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 anode回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.5 meissner回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.6 lampkin回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.7 RC発振器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 帰還回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 ブロック図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Colpitts回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 安定性の説明図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Llewellyneの提案回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3 帰還回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4 ナイキスト経路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 ナイキスト線図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1 熱雑音の等価回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 ノートンの定理による回路 . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.3 発振器における位相雑音の周波数特性 . . . . . . . . . . . . . . . . . . . . 24
5.1 PLLブロック図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2 1次の PLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.3 ブロック図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.4 チャージポンプ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.5 1次の雑音を含んだ場合の PLLブロック . . . . . . . . . . . . . . . . . . 28
5.6 入力雑音が無い場合:雑音スペクトラム . . . . . . . . . . . . . . . . . . . 29
5.7 入力雑音が無い場合:ジッター . . . . . . . . . . . . . . . . . . . . . . . . 29
5.8 VCO雑音が無い場合:雑音スペクトラム . . . . . . . . . . . . . . . . . . 30
5.9 VCO雑音が無い場合:ジッター . . . . . . . . . . . . . . . . . . . . . . . 30
5.10 低雑音入力における全雑音:雑音スペクトラム . . . . . . . . . . . . . . . . 30
5.11 低雑音入力における全雑音:ジッター . . . . . . . . . . . . . . . . . . . . . 30
5.12 低雑音VCOの出力雑音スペクトラム:雑音スペクトラム . . . . . . . . . . 30

vi 図目次
5.13 低雑音VCOの出力雑音スペクトラム:ジッター . . . . . . . . . . . . . . 30
5.14 チャージポンプを用いたPLL:入力雑音が無いときの出力雑音 . . . . . . 31
5.15 チャージポンプを用いたPLL:低入力雑音の場合の出力雑音 . . . . . . . 31
5.16 周波数分割を含んだチャージポンプPLL . . . . . . . . . . . . . . . . . 31
6.1 検証回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.2 Rと Aの関係図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7.1 (7.44)式の図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.2 (7.45)式の図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.3 ISFとセル数の関係 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.4 ISF波形 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.5 ISF波形 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7.6 クローバー電流と容量電流 . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7.7 差動セル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
7.8 相関がある時の雑音 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
9.1 設計の流れ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65

1
第 1章
発振器の概要
発振器といっても様々な発振器が考案されている。ここではおもに民生機器で使われている低周波用発振器について考え、マイクロ波用として考案された発振器については取り扱わない。
1.1 要求される性能・定義電子計測の機能回路の一つである発振器は、様々な電子機器において用いられているため、発振器に要求される性能も様々な要求がある。これらの要求項目を無作為に書き出してみると次のような項目がある。
電源依存性:電源電圧の定常的変動に依存しない。低電圧:乾電池のような低電圧で動作する。省電力にも繋がる。リップル電源電圧の時間的上下変動の影響を受けにくい。温度:温度に依存しない。安定性:定常状態になるまでに時間を要しない。雑音:出力での全ての雑音が小さい出力変動:出力信号の定常的変動が小さいジッタ:出力信号の時間的上下変動が無い値段:値段が安い。素子数が少ない。ペップ数が少ない。干渉:他からの影響を受けにくい。(Mix-modeなど)取り扱い:持ち運びなとが易しい。湿度:湿気が入らない、もしくは入っても影響を受けない圧力:圧力による変動が無い。(樹脂の変動、地球外気圧変動、海中での高気圧)
消費電力:消費電力が小さい、あるいは放熱が少ないトレランス:製造上のばらつきが小さい。
これらの項目は、
電気的特性:回路の改良によって改善できる項目環境による特性:環境によって変動を受ける項目で、電気回路の改善だけでは対策が出来ず、環境の改良によっても改善が見こめる項目

2 第 1章 発振器の概要
部品技術の進歩:部品によって変動を受ける項目で、電気回路の改善だけでは対策出来ず、部品の改良によっても改善が見こめる項目
に分類することが出来、次のようになる。電気的特性電源依存性、リップル、温度、安定性、雑音、出力変動、ジッタ-、干渉、消費電力、トレランス環境による特性値段、取り扱い、温度、湿度、圧力部品技術の進歩低電圧、温度、湿度、圧力、トレランス
1.2 発振器の種類一口に発振器と言っても非常に多くの種類の発振器が考案されている。そこで発振器の分類を考えることが望ましいのであるが、この分類も簡単に分類することは出来ない。一つの分類方法として正弦波発振器と、 正弦波以外の発振器に分けることが出来る。また共振回路に対して RLCなどの電子部品を用いる場合と機械的な部品とを用いる分類も存在する。その他の分類も考案されているが [[3]、あまり適切な分類方法とは言いがたい。ここでは簡単に波形の種類による分類によって分けてみることにする。
正弦波発振器Meissner Lampkin Colpitts Hartley 陽極同調格子同調 Ultra-audion Huth-Kuhn Clapp RC発振器Ring Oscillator De Laup Wien Bridge Sulzer Golicke
Transitron Crosby Franklin Gunn Push Pull
Mesny Holborn Butterfly GK Pierce AG Pierce
Sabaroff Push-Pull水晶 Heegner Butler Tri-Tet
SAW Oscillator非正弦波発振器
Blocking Pulsed Oscillator Ringing
Van der Pol Multivibrator ring oscillator
これらの発振器の基本回路を次に示す。ただしここでは、バイアス回路は含まれていない。Meissner、Lampkin、Colpitts、Hartley、陽極同調、格子同調についての回路図を示す。Ultra-audion、Huth-Kuhn回路は、その回路構成、現代の発振回路に要求される性能から用いられることは無いので省略する。 Clapp回路については後で詳しく述べる。

1.2 発振器の種類 3
図 1.1 Colpitts回路 図 1.2 Hartley回路
図 1.3 lattice回路 図 1.4 anode回路
図 1.5 meissner回路 図 1.6 lampkin回路
RC発振器は出力信号の位相を RC回路で位相を回転させ入力回路へ戻していく方式であり、この RC回路の代わりに能動素子そのものの位相回転によって置き換えている発振回路を Ring Oscillatorと呼んでいる。
図 1.7 RC発振器
Ring Oscillatorの場合基本回路においては、同調回路が存在しないので、どの周波数で発振するか判らない。そこで周波数を目的の周波数とする場合には、帰還回路の何処かに同調回路を付け加える必要がある。この同調回路を付け加えた Ring Oscillator は回路が簡単に構成できるということもあり、様々な製品で用いられている。部品による発振器の分類と言っても、電子部品以外の部品の場合には、その部品を電子部品で近似的に表現することが可能であり、その様に電子部品に置きかえると同調回路が全て電子部品から構成されている発振器と何ら変る所は無い。ただそれらの部品が持つ所の特殊な性質、つまり電子部品に置き換えたとき、通常の電子部品では得られないような特性を利用できる。例えば水晶を用いた発振回路では、Qの値を非常に大きく取ることが出来るために、非常に安定性の良い、経時変化が少ない発振器を実現することが可能になる。参考のために水晶の場合と SAWの特性について次に表で示しておく。

4 第 1章 発振器の概要
1.3 発振器の歴史発振器はこれまでどの様に発展してきたのか、歴史を追ってみることにする。年表の形で付録に示しておくことにする。ここでは年代ではなく、技術的な流れを追ってみることにする。発振器の技術的な流れは、特に民生用として次の事柄を満足するような発展を行ってきた。発振器解析の歴史は非常に古く、自由振動における雑音に関する理論としては、
1918年 4月 Abraham、BlochのMultivibrator
1923年 Appleton,Greevesが高調波の存在による安定性について発表1926年 van der Polの弛張発振回路1931年 Liewellyneがコンダクタンスを用いた安定方法を発表1933年 7月 Groszkowskiが安定性の理論を PIREに発表1938年自由発振器の雑音理論が Soviet Unionの Berstein[1]によって最初に確立された。1948年 Clapp回路の発表1945年 Fairによる真空管発振回路の安定性研究1931年 J. B. Dowによる電子結合発振器1938年 I. B. Meachamの Gridge発振器1953年 10月 E. A. Gerberによる水晶震動子測定法 review
1950年 10月 P.G.Sulzerの広帯域 RC発振器
値段が安い、安定性が良い、再現性がある、取り扱いが易しいこれらのことを満足するため、Si材料による IC化を中心に研究開発が行われてきたし、今もその方向で研究が行われている。そしてその研究は Si素子の高性能化により、より高い周波数での発振も可能になってきた。2001年の現時点で既に 2.4 [GHz]の発振器が ICの中に取り込まれ、商品化されている。(TC2000:zeevo社、アメリカ)
また値段を度外視する分野 (軍事、宇宙産業など)の需要もあり、そのような分野に対しては、値段と言うよりも性能重視のため Si以外の GaAsなどの材料が用いられ、非常に高い周波数で、しかも高出力の発振出力レベルが得られている。これらの目標を達成するためには、次に述べるような様々な問題を解決していく必要がある。
1. 新しい材料の開発2. 素子の高性能化、微細化3. 新しい回路の開発4. 新しいシミュレーションの開発5. 製造技術の高性能、高精度化
この様な進歩があってこそ、発振回路はより高性能となっている。

5
第 2章
振幅・周波数の解析
2.1 利得の解析ここでは利得をどの様に求めるかということについて考える。利得と言っても発振器における利得の解析であり、つまり帰還回路を含んだ場合の利得の計算である。簡単な増幅器の場合には、信号の流れは一方通行である為、その利得がどの様な形になるかを求めることは比較的易しい。しかし発振器の場合には、必ず帰還回路を含んでいるため、簡単な発振器においても利得を求めることは難しくなる。そこで利得を求めるにしても特殊な手法を用いて求める必要が出てくる。この様な場合に利得を求める手法として、Blackmannが導き出した、帰還回路の利得の計算方法が用いられる。
2.2 発振の基本原理発振を行わせるには、その基本原理について知らなければならない。その解析手法として二つの手法が考案されている。一つは帰還回路を 用いた説明であり、もう一つは負性抵抗を 用いた説明である。これらは当然同じ結果を導くが、考え方としてはかなり違いがある。この二つの手法について説明していくことにする。
2.2.1 帰還回路を用いた説明
ブロック図 2.1を考えると、次式が成立する。
Vo
Vi=
A1−βA
(2.1)
この式の分母がゼロになるとき、入力に何ら信号が無くとも出力の発生が起こる。すなわち発振が生じていることを意味しており、これを式で表現すると次に示す式が得られる。
βA = 1 (2.2)
この式の左辺はループ利得と呼ばれ、そのループ利得が実数の 1であることを示している。すなわち左辺の式に含まれる複素成分はゼロであり、実数成分は 1でなければならない。実数部分が 1であるときは発振が継続しているときと考えられ、発振が始まる瞬間においては 1より大きくなければならない。また位相成分がゼロであるとは、回路を一

6 第 2章 振幅・周波数の解析
周したときの位相変化はゼロもしくは 360 [deg]の整数倍でなければならないことを意味している。位相変化がゼロあるいは の整数倍と言うことは、ループ利得の虚数部分がゼロとなることを意味している。これらの条件を満足したときに発振が自動的に生じ、しかも継続して発振すると考えられる。
図 2.1 帰還回路
2.2.2 負性抵抗を用いた説明
この場合は、次の図 2.2に示すように回路を二つに分ける。通常一方は同調回路部分、もう一方は能動素子部分に分ける。その結果もし回路が発振しているならば、つまり発振信号の振幅が減衰することなく、また増加することもないためには、回路全体の抵抗はゼロとなるであろうと言うことである。つまり同調回路部分の実数部分と能動素子部分の実数部分の合計は、ゼロとならねばならない。虚数部分については、二つの部分について同じ値とならねばならない。またこの場合についても、発振が始まるためには最初の段階で全体の実数部分の値は負の値である必要がある。
図 2.2 ブロック図
以上二つの場合について考えたが、いずれの方法も同じ結果を与えるので、回路によっていずれかの方法がより簡単に求められる場合があるので、発振回路の種類によって使い分ける必要がある。これら 2つの方法は実は全く等価であるが、その発想の違いにより一方からもう一方を導くことは簡単ではない。
2.2.3 具体例
ここで先に述べた二つの方法を検証する意味からも、次に示す Colpitts(正確には Clap
回路)図 2.3について解析を行ってみる。

2.2 発振の基本原理 7
図 2.3 Colpitts回路
まず始めにループ利得を計算してみる。Blackmann の方法に従って、この場合ループ利得を計算するには、BJT の従属電源の起動電圧を 1 として、BJT の入力に現れる電圧を計算し、その符号を入れ替えることによって与えられる。その結果次の二つの式が得られる。
ω =
√LC1C2(C1 +C2 +GLgπ −GLgm)
LC1C2(2.3)
gm =G2C1Lgπ +GC2
1 +2GC1C2 +g2πC2GL+gπC2
2 +G2C2Lgπ +GC22
−C1C2 +G2LC2 +G2LC1 +GLgπC2
(2.4)
周波数を表す式は、β = rπ gm であるので、次のように書きかえることが出来る。
ω =
√C1 +C2 +GL(gm/β −gm)
LC1C2
∼=√
C1 +C2 −GLgm
LC1C2(2.5)
同調回路の Qが大きい場合には、G ∼= 0であるので、上の式は
ω ∼=√
C1 +C2
LC1C2(2.6)
と言う簡単な式となる。また同調回路の Q が小さくなるにつれて、共振周波数は低い方へずれていくことが分かる。次に (2.4)式について考える。この式は発振を起こさせるための条件を与えているのであるが、同調回路の Qの値が高い場合よりも低い場合の方が問題となる。Qが低い場合とは Gの値が大きな場合に相当するので、(2.4)式において Gの値が大きいとすると、次のような式が得られる。
gm → C1
C1 +C2gπ =
C1
C1 +C2
gm
β(2.7)
この式の右辺の値が大きいほどループ利得が大きいと言うことになるので C1 ≫ C2 さらに同じ直流電流利得の場合には電流を多く流すことによって発振の強度が上昇することになる。

8 第 2章 振幅・周波数の解析
次に負性抵抗の考えを用いた解析の場合に ついて、同じ回路を用いて考えてみる。この場合回路を 2つに分ける必要があるが、簡単に解析を進めるためにコイルとコンダクタンスを一つの回路、残りを もう一つの回路として取り扱う。そうするとコイルとコンダクタンスによるアドミタンスは、次のようになる。
G+1
jωL(2.8)
残りの回路のアドミタンスを求めなければならないが、そこで成立する式を書くと、流れ込む電流を iとすれば
i = (gπ + jωC1)V (2.9)
Vb =V +i+gmV
jωC2(2.10)
この二つの式からアドミタンスを求めると、次のように得られる。
iVb
=jωC2(gπ + jωC1)
gm +gπ + jω(C1 +C2)(2.11)
この式と (2.6)式の合計がゼロになると言うのが発振可能となる条件であるので、その式は次のように与えられる。
G+1
jωL+
jωC2(gπ + jωC1)
gm +gπ + jω(C1 +C2)= 0 (2.12)
この式の実部、虚数部をゼロと置くことにより (2.3)(2.4) 式と同じ式を導くことが出来る。よって二つの方法のいずれを用いても良く、回路に応じて使い分けることが望ましい。

9
第 3章
安定性
発振器における安定性とは、同じ波形が繰り返し生じる状態のことを指している。このことを定常状態と呼んでいる。ここでは、それを確認するいくつかの方法について記述することにする。
3.1 安定・不安定ここでは既に古典となっている、各種安定判別法 の概要について述べる。これらの判定法は、むしろ制御理論として述べてあることが多く、電子回路のテキストとしては通常取り上げられることは無いが、当然電子回路においても重要な概念である。この著書は主に発振器の雑音に関する著作であるので、 安定性の各種理論についてもその概要を説明するにとどめる。まず最初に安定、不安定と言う言葉の意味を明確にする必要がある。なぜならば発振器が同じ波形を時間的に繰り返し発生している状態と言うのは、不安定と呼ぶにふさわしくないからである。しかし発振器が発振を始める初期の段階においては、静止状態から動的状態へ変化する わけであり、この状態を安定であると呼ぶのは、これもまた少々無理がある。そこでこれらの言葉の意味を明確にしておく必要が出てくるわけである。過去の研究により、これらの概念は次のように分類されている。
3.2 発振器の安定性発振器の安定性とは、定常状態つまり時間の経過に対して、常に同じ発振状態を維持していることである。発振器が安定状態にあることは、非線形の状態で常に動いているので、非線形方程式を取り扱わねばならないので、基本的に難しいもんだである。ここでは二つの方法について述べておく。
3.2.1 Groszkowskiの方法
ここで Grozkowskiによる発振の安定性について、述べておきたい。次の図に示してある、発振器のブロック図を考える。

10 第 3章 安定性
図 3.1 安定性の説明図
ρ は負性抵抗とし、Z は図 3.1(b)に示すような同調回路を示している。安定状態の発振回路では、発振周波数の一周期を取ったエネルギーは、先に説明したようにゼロでなければならないので、次式が成立することになる。∮
idv = 0 (3.1)
発振波形は歪んでいるので、ここで電流 i、電圧 vは高調波成分を含んでいるので、各々次のように表現することが可能である。
i =∞
∑k
Ik sin(kωt +αk) (3.2)
v =∞
∑k
Vk sin(kωt +αk) (3.3)
(3.3)式から
dv = ∑kωVk cos(kωt +βk)dt (3.4)
これらの式を (3.1)式へ代入する。式を変形し、三角関数の公式を用いると、次のようになる。
∑πkVkIk sin(αk −βk) = 0 (3.5)
この式は、高調波成分の虚数部分の総和が、ゼロとなることを意味している。ここで図??(b)の同調回路に適用してみる。k 番目の高調波に対する負荷インピーダンスは、次のように与えられる。
Z−1k = G+ jkωC+
1jkωL
(3.6)
このとき k番目の高調波に対する電流 Ik と電圧 Vk の式は、次のようになる。
Vk = ZkIk (3.7)
この関係を用いると、(3.5)式は、次のように変形される。
∑V 2k ℑ(
kZk
)= 0 (3.8)
ここで、次のように置く。
mk =Ik
I1(3.9)
nk =Ik
I1(3.10)
ω0 =1√LC
(3.11)

3.2 発振器の安定性 11
これらの式を用いると、次の結果が得られる。
0 = ℑ(
1Z1
)+∑
kℑ(
kZk
)m2
k (3.12)
0 = ℑ(Z1)+∑k
ℑ(kZk)n2k (3.13)
ℑ(
kZk
)=
1ωL
[(ωω0
)k2 −1
](3.14)
発振の高調波、基本波に関して、次のような式が成立する。
ωk ∼= kω0 (3.15)(ω00
ω0
)2
−1 ∼= 2∆ωω0
(3.16)
ただし
ω00 −ω0 = ∆ω (3.17)
これらの式を用いると、(3.12)(3.13)式は、次のようになる。
∆ωω0
=−12(3m2
2 +8m23 +15m2
4 + · · ·)
(3.18)
∆ωω0
=− 12Q2
(43
n22 +
98
n23 +
1615
n24 + · · ·
)(3.19)
ただし
Q =ωCG
(3.20)
(3.18)(3.19)式の結果から、次のような結論が出てくる。
• 高調波が含まれていると、(3.18)式で与えられる分だけ周波数は低下する。• 発振周波数が変化しないようにするには、高調波成分を極力小さくする必要がある。• (3.19)式から、同調回路の Qを高くすることにより、周波数の変動が小さくなることが分かる。
3.2.2 Llewellyneの方法
これは 1931年 Llewellyneによって提案された周波数の安定性について発表された内容である。基本的な考えは、当時真空管が主流であったので真空管について記述してあるが、理論自体は半導体においても同様に与えられる。元の論文を BJTで置き換えて述べることにする。そうすると次のような記述となる。
BJTのベースあるいはコレクタに直列にリアクタンスを挿入することにより、発振周波数を BJTに依存しない形で決めることが出来る。このことを説明するために、次の回路を考えてみる。元の論文は、真空管を用いて説明しているが、現在では真空管は余り用いられないので、ここでは BJTを用いて説明を行う。
12 第 3章 安定性
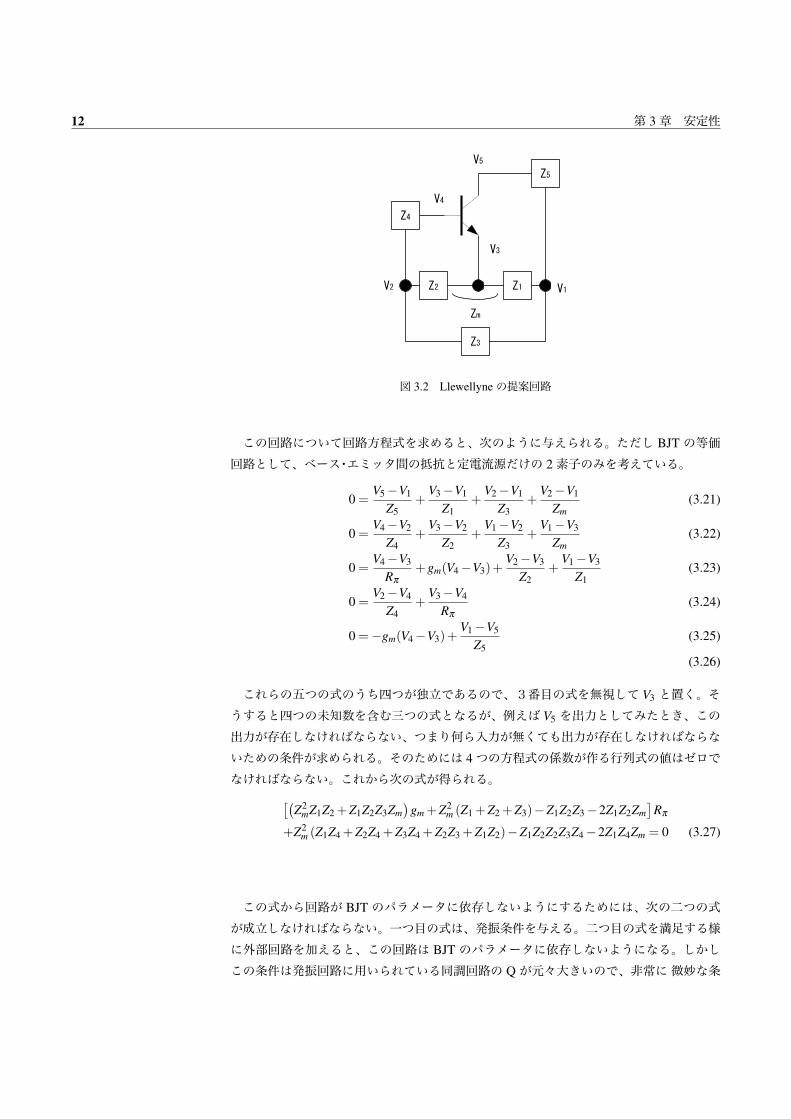
図 3.2 Llewellyneの提案回路
この回路について回路方程式を求めると、次のように与えられる。ただし BJTの等価回路として、ベース・エミッタ間の抵抗と定電流源だけの 2素子のみを考えている。
0 =V5 −V1
Z5+
V3 −V1
Z1+
V2 −V1
Z3+
V2 −V1
Zm(3.21)
0 =V4 −V2
Z4+
V3 −V2
Z2+
V1 −V2
Z3+
V1 −V3
Zm(3.22)
0 =V4 −V3
Rπ+gm(V4 −V3)+
V2 −V3
Z2+
V1 −V3
Z1(3.23)
0 =V2 −V4
Z4+
V3 −V4
Rπ(3.24)
0 =−gm(V4 −V3)+V1 −V5
Z5(3.25)
(3.26)
これらの五つの式のうち四つが独立であるので、3番目の式を無視して V3 と置く。そうすると四つの未知数を含む三つの式となるが、例えば V5 を出力としてみたとき、この出力が存在しなければならない、つまり何ら入力が無くても出力が存在しなければならないための条件が求められる。そのためには 4つの方程式の係数が作る行列式の値はゼロでなければならない。これから次の式が得られる。[(
Z2mZ1Z2 +Z1Z2Z3Zm
)gm +Z2
m (Z1 +Z2 +Z3)−Z1Z2Z3 −2Z1Z2Zm]
Rπ
+Z2m (Z1Z4 +Z2Z4 +Z3Z4 +Z2Z3 +Z1Z2)−Z1Z2Z2Z3Z4 −2Z1Z4Zm = 0 (3.27)
この式から回路が BJTのパラメータに依存しないようにするためには、次の二つの式が成立しなければならない。一つ目の式は、発振条件を与える。二つ目の式を満足する様に外部回路を加えると、この回路は BJTのパラメータに依存しないようになる。しかしこの条件は発振回路に用いられている同調回路の Qが元々大きいので、非常に微妙な条

3.3 安定性 13
件になると思われる。
0 = Z3 (Z1 +Z2 +Z3)+Z1Z2 (3.28)
Z4 =Z2Z3 (Z1 +Z3)
Z1Z2 +Z2Z3 +Z3Z1 +Z23
(3.29)
(3.30)
3.3 安定性増幅器は発振してはならず、安定に信号を大きくしなければならない。しかし現実にはそのように設計しているつもりでも、意に反して発振を起こしてしまう場合がある。どの様な状態で回路が不安定となり、 発振を生じるかを検討しておくことは大切である。ここでは増幅器がどの程度安定であるかを見積もるための理論について検討をしていく。
3.3.1 一般理論
次の系を考える。
図 3.3 帰還回路
この伝達関数 G(s)は
A(Vi −βVo) =Vo (3.31)
より
G(s) =A
1+βA(3.32)
と与えられる。ここで s は複素数を示し、(3.32) 式は複素関数であることを示している。この式の安定不安定は、(3.32)式の分母が複素平面上において右半面または虚軸上にゼロ点を持つかどうかによって判定することが出来る。右半面に分母のゼロ点(では極)を持てば、図 3.3に示す系は時間と共に信号の大きさが増加し虚軸上にあれば持続した信号を生じる。逆に左半面にゼロ点を持てばたとえ何らかの信号が発生しても常にその信号は減衰することとなる。これらを表現する方法として次のものがある。
• ラウスーフルビッツの判定法• ナイキストの判定法• 根軌跡法• リャプーノフの判定法

14 第 3章 安定性
ここでリャプーノフの判定法とは、系がリャプーノフ関数を持てば安定であるというものである。簡単に紹介すると、次の条件を満たす関数(リャプーノフ関数と呼ばれる)が存在すれば、その系は安定である。
• G(x)は一次の偏導関数と共にある閉領域(原点も含む)で連続であること• G(x) = 0であること• 上記閉領域の中で G(x)は、x = 0の点を除き正であること• G(x) ·gradG(x) = 0であること
この四つの条件を満たさねばならない。本書ではリャプーノフの判定法については、この程度にしておく。しかしこの判定法は、非線形の系をも取り扱うことが出来、応用範囲の広い判定法である。
3.3.2 ラウスーフルビッツの判定法
これは行列式を用いた安定判別法であり、その方法を次に述べる。次の方程式があった場合
F(s) = a0sn +a1sn−1 ++ · · ·+an−1s+an (3.33)
下に示すような行列式を考える。
D1 = |a1|
D2 =
∣∣∣∣ a1 a3a0 a2
∣∣∣∣···
Dn =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a1 a3 a5 a7 · · · a2n−1a0 a2 a4 a6 · · · a2n−20 a1 a3 a5 · · · a2n−3· · · · · · · ·· · · · · · · ·· · · · · · · ·0 0 0 0 · · · an
∣∣∣∣∣∣∣∣∣∣∣∣∣∣(3.34)
これらの D1 , D2 , · · · , Dn がすべて正であれば F(s) = 0は、複素平面の左半面に根を持つ。しかしこれらの行列式を計算する事は大変な作業である。このため次の手順が通常用いられる。まずは (3.33)式の係数からなる表を作成する。つまり偶数項と奇数項とを、次のように並べ、そこから下に示す手順で表を埋めていくのである。
sn a0 a2 a4 a6 · · ·sn−1 a1 a3 a5 a7 · · ·sn−2 A1 A2 A3 A4 · · ·sn−3 B1 B2 B3 B4 · · ·· · · · · · · ·
s2 C1 C2 0 0 0 0 0s1 D1 0 0 0 0 0 0s0 E1 0 0 0 0 0 0
(3.35)

3.3 安定性 15
ただし
A1 =a1a2−a0a3
a1A2 =
a1a4−a0a5a1
A3 =a3a4−a2a7
a3· · ·
B1 =A1a3−a1A2
A1B2 =
A1a5−a1A3A1
B3 =A2a5−a3A4
A2· · ·
···
E1 =D1C2−C1·0
D1
このように組み立ててくると a0 , a1 , A1 , B1 , · · · ,=C1 , D1 , E1 が全て同じ符号を持つならば F(s) = 0の根は、全て複素平面の左半面に存在する。また途中符号が変わると、その変わった回数だけ右半面に根を持つ。例として次の場合を考えてみる。
(s−1)(s+2)(s+3) = s3 +4s2 +5s−6
上の手順に従って表をつくると
s3 1 0s2 4 0s1 4.5−(−6)×1
4 = 6.5 0s0 6.5×8−6)−4×0
6.5 =−6 −6
s1 から s0 へ変化するとき符号が 1回変化している。よって 1個複素平面の右半面に根を持つ。ラウスーフルビッツの判定法を適用していくとき分母がゼロになるときがある。このときは小さい値 ε を置き、その後ゼロに近づけることによって計算を進めることが出来る。またある行のすべての項がゼロとなることもある。この場合、ゼロとなる行の直前の行
を係数とする式が因数となっている。その因数は、虚軸上に根を持ち、不安定となる。次のような式である。
F(s) = s3 + s2 +4s+4
この式に対して計算を進めていくと、s1 の項がゼロとなり、その前の項である s2 +4が因子となっている。この式は、s =±2 jの根を持ち、不安定となる。
3.3.3 ナイキストの判定法
ナイキストの判定法は、ラウスーフルビッツの判定法と違いグラフを用いて系の安定、不安定を調べるものである。 (3.32)式において、1+βAが複素 sの右半面上にゼロ点を持てば、系は不安定となる。またその前に βA自体が極を持っても系は不安定となる。それは開ループ自体が、不安定となるからである。そこでこの関数は安定である、つまり複素平面の右半面に極を持たないとする。次に閉ループ自体が安定であるためには 1+βA
がゼロ点を持たないことである。1+βAと βAのゼロ点は違う。よって次の手順で安定、不安定を調べる必要がある。安定であるには
• 1+βAが複素平面の右半面に極を持たない• 1+βAが複素平面の右半面にゼロを持たない

16 第 3章 安定性
が系が安定であることの条件である。複素平面上で次の経路を考える。
図 3.4 ナイキスト経路
虚軸上の 1+βAの極は、無限小の半円を取り通過しないようにする。次に半径無限大の半円を考える。極を除いたのは系全体の極(1+βAのゼロ点)では無いこと及びが発散してしまうためである。この半円の中に 1+βAのゼロ点または、極点が存在するときは不安定となる。複素関数論より、この半円の中にゼロ点の個数が Z 個、極点の個数が P個存在すると、複素平面上において上記半円上を複素数 sが移動したとき F(s)平面の原点の周りを N 回転し、Z , P , N には、次の関係式が存在する。
N = Z −P (3.36)
F(s)では無く βAを考えると、(−1 , j0)の周りを N = Z −P回転することとなる。このことは、次のようにして証明される。F(s)が m位のゼロ点を zに持ち、n位の極を pに持つならば、それらを取り囲む閉曲線Cを考える。この曲線の内部で F(s)は、次のように表せる。
F(s) =(s− z)m
(s− p)n Fa(s) (3.37)
もちろん F0(s)は、この曲線の内部で、ゼロ点も極点も持たない。(3.37)式の両辺の対数を取ると
ln[F(s)] =m
s− zds− n
s− pds+
F ′0(s)
F0(s)ds (3.38)
右辺の最後の項は、曲線 C 内部に極点を持たないので、右辺はゼロ点 zに mの留数を持ち、極点 pに −nの留数を持っている。次に (3.38)式を、曲線Cに沿って接近した点 S
と S′ を考え、曲線の周りの周回積分を計算すると、次の式が得られる。
ln[F(S)]− ln[F(S′)] = j2π(m−n) (3.39)
F(s)を振幅と位相で F(s) = |F(s)|exp[ jθ(s)]とすると、上の式は、次のようになる。
ln |F(S)|− ln |F(S′)|+ j[θ(S)−θ(S′)] = j2π(m−n) (3.40)

3.3 安定性 17
接近していた Sと S′ とを一致させると、左の最初の二つの項は、消え次のようになる。
θ(S)−θ(S′) = 2π(m−n) (3.41)
この結果は、多数のゼロ点あるいは極点が、存在していても成立する。その場合、mとnとをそれらのゼロ点および極点の次数の和に置き換えればよい。
(3.41)式の両辺を 2π で割ると、左辺は、曲線 C の周りを回る回数となり、その値は、右辺の数値として示していることになる。
β , Aが共に安定である場合このとき βAは、複素平面の右半面に極を持っていないので N = Z となる。そしての
軌跡は、(−1 , j0)の周りを反時計回りに N 回転することとなる。βAは一般に次式で書くことが出来る。
βA =(s+ z1)(s+ z2) · · ·(s+ zm)
(s+ p1)(s+ p2) · · ·(s+ pn)(3.42)
今の場合 p1 , p2 · · · pn は、正の実数部を持つ。なぜならば β , Aが共に安定であるので。また n > mであるので |s| → ∞のとき (3.42)式の βAはゼロとなる。次に図 3.4の領域ⅠとⅢを考える。このとき s = jω である。(3.42)式を考える。z1 , z2 · · · , zm , p1 , p2 · · · pn のうち複素数が存在すると(実数の場合は、以下の議論で a2 , b2 をゼロと置けば良いので同じ結論が得られる)必ず共役な複素数が存在するので
zi = a1 + ja2
pk = b1 + jb2
とし、これらと共役な複素数のみの絶対値と位相を考えると∣∣∣∣ ( jω +a1 + ja2)( jω +a1 − ja2)
( jω +b1 + jb2)( jω +b1 − jb2)
∣∣∣∣= ∣∣∣∣a21 +a2
2 −ω2 + j2ωa1
b21 +b2
2 −ω2 + j2ωb1
∣∣∣∣ (3.43)
これは ω について偶関数であるので、ω , −ω でも値は同じである。また位相は
tan−1 2ωa1
a21 +a2
2 −ω2 − tan−1 2ωb1
b21 +b2
2 −ω2 (3.44)
これは ω について奇関数であるので 、 ω , −ω で位相の正負が逆になる。以上よりβA平面上では |s| → ∞においてゼロとなり実軸に対して対称なグラフとなる。(3.42)式がゼロの値を持つ極が存在する場合は、特別なグラフとなる。この場合には S平面上のゼロ点が 面上で無限大となるからである。また複素関数論で示すようにS平面上で経路の左側は、 βA平面上でも左側となることに注意のこと。以上をまとめると、次のようになる。
1. 系の判定を行うに当たり、S平面の虚軸上の軌跡のみしかも領域Ⅰ、Ⅲは βA面上では対称に現れるので領域Ⅰに相当する部分のみを考えれば良い。
2. 領域Ⅰにおいて ω が無限大から出発(βAでは原点に相当)して ω がゼロまで動くときの βA の曲線を描く。そのとき曲線の進行方向に対し左手に (−1 , 0) を含むと系は不安定である。
18 第 3章 安定性
3. その際 そのものの中にS平面の右半平面上に極を持っている場合ナイキストの判定法自体が成立しない。 と言うより元々不安定な系であるので、ナイキストの判定法を適用する前に確認しておかねばならない。
次にナイキストの判定法を用いる場合の、用語の説明をしておこう。
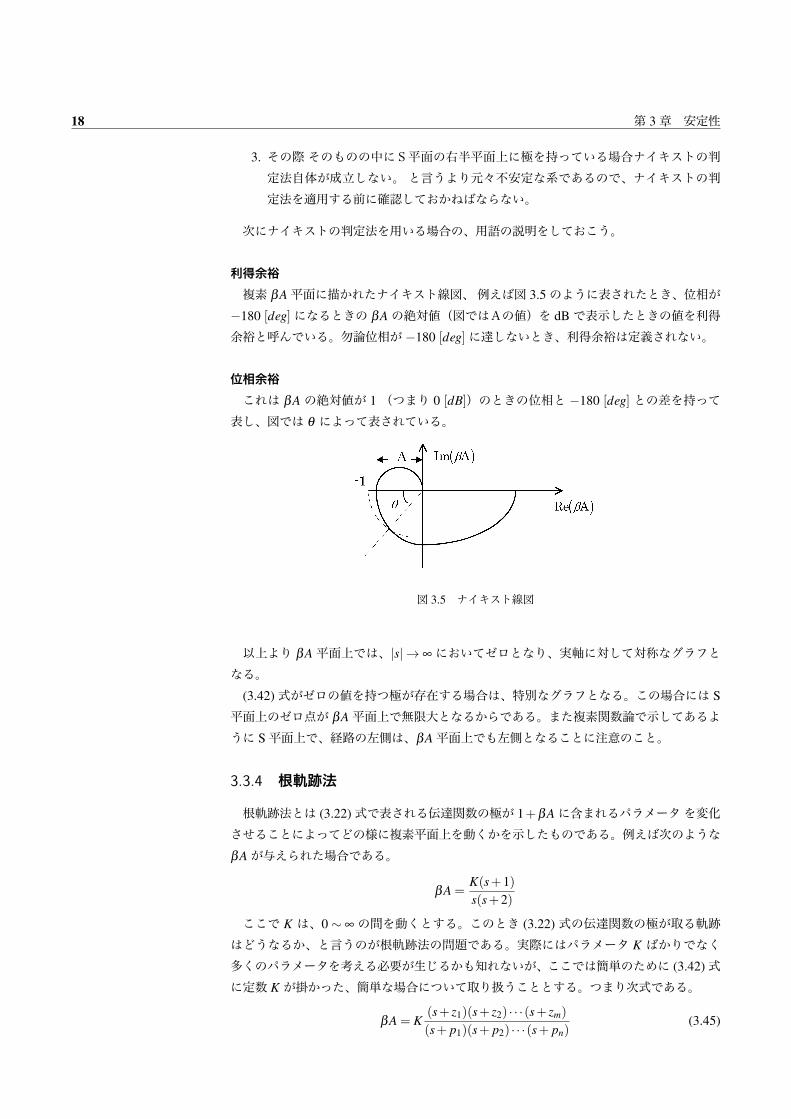
利得余裕複素 βA平面に描かれたナイキスト線図、例えば図 3.5のように表されたとき、位相が
−180 [deg]になるときの βAの絶対値(図ではAの値)を dBで表示したときの値を利得余裕と呼んでいる。勿論位相が −180 [deg]に達しないとき、利得余裕は定義されない。
位相余裕これは βAの絶対値が 1(つまり 0 [dB])のときの位相と −180 [deg]との差を持って
表し、図では θ によって表されている。
図 3.5 ナイキスト線図
以上より βA平面上では、|s| → ∞においてゼロとなり、実軸に対して対称なグラフとなる。
(3.42)式がゼロの値を持つ極が存在する場合は、特別なグラフとなる。この場合には S
平面上のゼロ点が βA平面上で無限大となるからである。また複素関数論で示してあるように S平面上で、経路の左側は、βA平面上でも左側となることに注意のこと。
3.3.4 根軌跡法
根軌跡法とは (3.22)式で表される伝達関数の極が 1+βAに含まれるパラメータを変化させることによってどの様に複素平面上を動くかを示したものである。例えば次のようなβAが与えられた場合である。
βA =K(s+1)s(s+2)
ここで K は、0 ∼ ∞の間を動くとする。このとき (3.22)式の伝達関数の極が取る軌跡はどうなるか、と言うのが根軌跡法の問題である。実際にはパラメータ K ばかりでなく多くのパラメータを考える必要が生じるかも知れないが、ここでは簡単のために (3.42)式に定数 K が掛かった、簡単な場合について取り扱うこととする。つまり次式である。
βA = K(s+ z1)(s+ z2) · · ·(s+ zm)
(s+ p1)(s+ p2) · · ·(s+ pn)(3.45)
3.3 安定性 19
また K の値が −∞ ∼ 0の範囲を取るときは、逆根軌跡法と呼ばれる。さて (¥れf{ 3.45)式で表される根軌跡を求めるには、いくつかの法則がある。次にそれらを調べていくことにする。
K=0の点1+βA式が求めるところの極が持つ性質であるので
|s+ z1||s+ z2| · · · |s+ zm||s+ p1||s+ p2| · · · |s+ pn|
=1|K|
(3.46)
より K = 0の点は、−p1 , − p2 , pn つまり (3.45)式の極を示している。
K = ∞の点K = 0と同様に K = ∞の点は、−z1 , z2 · · · zm で与えられる。つまり K がゼロから無限大に変化すると (3.45)式の極からスタートし、ゼロ点で終わる。ここで K = 0の出発点と K = ∞の終点の数が違うように思うかも知れないが、有理関数の場合無限大まで考えると、極の数とゼロの数は同じであることに注意しなければならない。つまり βAの軌跡の数は無限大を考慮しない場合の極の数、またはゼロの数の多い方に一致するのである。
根軌跡は実軸に対して対称であるこれは根軌跡自体が 1+βA = 0の根であり、いくら K の値が変化しても 1+βAから求められる値は必ず共役複素数を持つからである。
sが大きいとき根軌跡は、次の角度を持った直線に漸近していく。
θ =(2k+1)π
p− z(3.47)
ただし k = 0 , 2 , · · · (p− z)
(3.45)式より
|s+ z1||s+ z2| · · · |s+ zm||s+ p1||s+ p2| · · · |s+ pn|
=−1|K|
(3.48)
左辺の分母、分子のカッコをはずすと
sm +a1sm−1 + · · ·+am
sn +b1sn−1 + · · ·+bn=
−1|K|
(3.49)
となる。ここで左辺の分母、分子を分子で割って第 2項まで残すと
sn−m +(b1 −a1)sn−m−1 ∼=−K (3.50)
ここで n−m = ℓと置いて両辺の ℓ乗根を取ると
s[
1+b1 −a1
s
]= (−K)1/ℓ (3.51)
20 第 3章 安定性
(b1 −a1)/sは非常に小さいので、(3.51)式は次のようになる。
s[
1+b1 −a1
ℓs
]= (−K)1/ℓ (3.52)
(−1)1/ℓ は、次のように置くことが出来る。
(−1)1/ℓ = cos(2k+1)π
ℓ+ j sin
(2k+1)πℓ
(3.53)
全ての漸近線は次式((6.24)式で表される実軸上で交わる次に s = σ + jω と置いて (3.53)式を用いて (3.52)式の実部と虚部を取ると
σ +b1 −a1
ℓ∼= (K)1/ℓ cos
(2k+1)πℓ
(3.54)
ω ∼= (K)1/ℓ sin(2k+1)π
ℓ(3.55)
(3.54)(3.55)式より (K)1/ℓ を消去すると
ω ∼=(
σ +b1 −a1
ℓ
)tan
(2k+1)πℓ
(3.56)
(3.56)式は複素平面上で、傾き
tan(2k+1)π
ℓ(3.57)
で、切片はa1 −b1
ℓ(3.58)
の直線を表している。(3.46)式から (3.48)式を求めたときに分かるように a1 , b1、は次の意味を持っている。
a1 = z1 + z2 + · · ·+ zm (3.59)b1 = p1 + p2 + · · ·+ pn (3.60)
(3.57)(3.58) 式より (3.58) 式の切片は、伝達関数が 決まれば一定値となるが、(—refEqStability-33)式は、kの値により変化する。よって上の結論が得られる。
実軸上の根軌跡はその点より右側に極点、ゼロ点の合計数が奇数個存在しているところにしか根軌跡は存在しない
(3.44)式と βA =−1より角度に関し、次の式が成立する。K > 1の場合
Σmi=1arg(s+ zi)−Σn
i=1arg(s+ pi) = (2k+1)π (3.61)
ただし k = 0 , ±1 , ±2 , · · ·複素数は必ずその共役複素数を持ち、角度は互いに逆符号であるので (3.61)式で ±0となって角度に寄与はしない。よって実軸上の極ゼロだけが (3.61)式に現れるのであるが、軌跡上のてんから左にある極ゼロは、角度がゼロである。右に極、ゼロがある場合、その数が偶数個あると 2nの整数倍、奇数個あると nの奇数倍となる。(3.61)式が成立するので nの奇数倍でなければならない。そのほかにも便利な定理が存在するが、ここでは省略する。と言うのも (3.44)式自体余り一般的な式ではないし、電子回路基礎としては深く追求しても余り意味がないと思われるからである。又シグナルフローグラフという概念もあるが本著では取り上げない。

21
第 4章
雑音の解析
雑音の問題も難しい問題であるが、特に発振器 の場合には回路動作自体が非線形動作を行っているので、その他の線形動作を行っている 回路よりも更に難しい問題を含んでいる。この非線形動作によって発振器 の場合には、低周波における雑音が高周波へ変換されるため、ただ単に動作周波数だけでの雑音以外に低周波での雑音についても考慮しなければならない。第 1章では、雑音についての一般的な概要について述べている。第 7章では、ISF(Impulse Sensitivity Function)を用いた雑音解析について、第??章では統計解析を用いた雑音の解析について述べている。
4.1 雑音の概要雑音自体膨大な研究分野であるが、ここでは発振器の雑音問題を考えるに当たり、役に立つと思われる雑音一般の定理及び公理について纏めておいた。まず初めに雑音にはどの様な種類の雑音があるか、それらの雑音はどの様な式で表されるかと言うことについて述べてみる。
4.1.1 雑音の種類
次に示すような様々な雑音が存在する。
熱雑音 (白色雑音)
この雑音は帯電した粒子が熱振動によって振動するとき、電気を持った粒子が振動するために微小な電流が発生すると言うことによって生じる。よってこの電流の値を求めるためには、熱統計力学を用いて求められることになり、次の式によってその大きさが与えられる。このとき帯電した粒子が振動する場合には、必ずその粒子が存在する所の物体に電気抵抗が存在するので、式の中には必ず抵抗値が現れる。
v2 = 4kT R∆ f (4.1)
ここでk = 1.3806×10−23:Boltsmann定数T:絶対温度R:抵抗値∆ f:雑音を測定するときの周波数幅

22 第 4章 雑音の解析
この式を用いて物質を表現する回路図を示すと、次の図の様に与えられる。
図 4.1 熱雑音の等価回路
図 4.2 ノートンの定理による回路
この等価回路は図 4.2 の様にノートンの定理を用いることによって電流源 でも与えられる。ただし図の上では電流源の記号に矢印が入っているが、雑音電流としては電流の向きは無いことに注意 しなければいけない。この電流源の値は次の式によって与えられる。
i2 =v2
R2 = 4kT G∆ f (4.2)
ただしG = 1/R
ショット雑音この雑音は半導体のPN接合の様にポテンシャルの壁があるときに、その壁を帯電した粒子が通過することによって発生する雑音である。帯電した粒子は連続した流れではないため、粒子が通過することによってパルス上の雑音電流として現れる。この値は次の式によって求めることが出来る。
i2 = 2qI∆ f (4.3)
ここでq = 1.60210×10−19:素電荷I:流れる電流の平均値
フリッカー雑音(1/ f 雑音、ピンク雑音)この雑音は半導体の空乏層などの中に存在 する格子欠陥などに電荷がトラップされ、 その後放出されることによって生じる電流によって引き起こされる。この雑音は次の式によって表現できる。
i2 = kIa
f b ∆ f (4.4)
ここでK:定数I:流れる電流の平均値f:雑音測定点での周波数

4.1 雑音の概要 23
バースト雑音(ポップコーン雑音)この雑音の原因は良く判っていないが重金属の 不純物によって引き起こされる。例えば金を含んでいる物は大きなバースト雑音を生じる。その方程式は次の式で与えられる。
i2 = K2Ic
1+( f/ fc)2 ∆ f (4.5)
c:定数(0.5 ∼ 2) fc:特性周波数アバランシェ雑音P-N接合がツエナーまたはアバランシェ・ブレークダウンしているときに発生する雑音。これはデバイスの形状や Si結晶の状態によって決まるため式として表現することは難しい。
物理的な現象によって生じる雑音についての概略説明が終ったので、次に回路の場合についての雑音の種類について述べておく。
4.1.2 回路表現における雑音
振幅雑音振幅雑音は、発振器においてあまり問題となることは無い。それというのも大部分の発振器において、発振そのものの振幅をある値に収めるため、振幅の大きさ自体をリミッタで押さえてしまうためである。位相雑音位相雑音とは発振器の信号波形が時間と共に変動する現象のことを言い、周波数スペクトラム上で本来の発振周波数 に対して側波帯として現れる。その程度を示すため、次の定義式が用いられる。単位は、搬送波を基準とし 1 [Hz]当たりの位相雑音と与えられ dBc/Hzと表現される。
Ltotal(∆ω) = 10log[
Psideband(ω0 +∆ω , 1 Hz)Pcarrier
](4.6)
発振器においては、次の図??に示す様に 3 つの領域に示すような周波数特性がある。これらの周波数領域についての解析は、この後の章において説明されている。この図??の中及び (??)式の中で、totalと言う言葉が用いられているのは、雑音の振幅変化による成分と位相による成分の二つの成分が存在するからである。しかし一般的に発振器は、振幅を制限する回路が用いられるため、実用上位相による雑音成分だけが重要となる。

24 第 4章 雑音の解析
図 4.3 発振器における位相雑音の周波数特性
ある周波数範囲における雑音の計算を行ってみる。この周波数範囲では、1/ f で雑音が変化するとすると、次の式が (4.10)式から得られる。
Pmix =∫ ∆ fmax
∆ fmin
L(∆)d(∆ f ) (4.7)
この式を計算すると、次の結果が得られる。
Pmix = L(√
∆ fmin •∆ fmax
)• (∆ fmax −∆ fmin) (4.8)
ジッタージッターは時間に対する信号波形の不確実さ、揺らぎの標準偏差と定義することによってより明確に規定 することが出来る。そうするとこの値は次の式によって与えられる。
σ2τ =
1ω2
0E{[ϕ(t + τ)−ϕ(t)]2
}(4.9)
ここで E は期待値を計算することを意味する。ϕ(t)の共分散 Rϕ (τ)を用いて、上の式は次のように書きなおすことが出来る。
σ2τ =
2ω2
0
[Rϕ (0)−Rϕ (τ)
](4.10)
ϕ(t)の電力スペクトラム Sϕ (ω)を用いて、Khinchinの定理から
Rϕ (τ) =1
2π
∫ ∞
−∞Sϕ (ω)exp( jωτ)dω (4.11)
この式を用いるとジッターの標準偏差は、次の様になる。
σ2τ =
4πω2
0
∫ ∞
0Sϕ (ω)sin2
(ωτ2
)dω (4.12)
25
第 5章
PLL
発振回路の応用として、PLLにおける雑音の問題について取り上げている。PLLの中には VCOが含まれているので、この著作における応用的な回路として最適な題材である。
5.1 PLLの基礎PLLにおける雑音の話を始める前に、PLLの基本動作について概要を述べておく。PLL
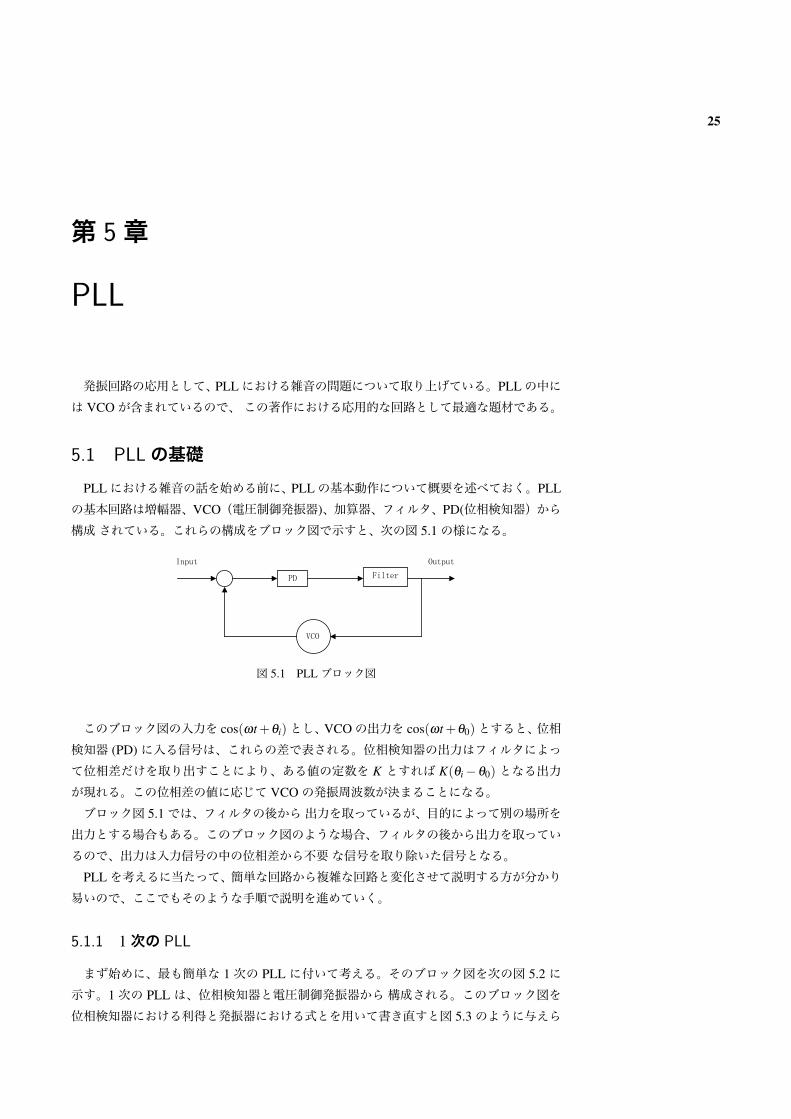
の基本回路は増幅器、VCO(電圧制御発振器)、加算器、フィルタ、PD(位相検知器)から構成されている。これらの構成をブロック図で示すと、次の図 5.1の様になる。
図 5.1 PLLブロック図
このブロック図の入力を cos(ωt+θi)とし、VCOの出力を cos(ωt+θ0)とすると、位相検知器 (PD)に入る信号は、これらの差で表される。位相検知器の出力はフィルタによって位相差だけを取り出すことにより、ある値の定数を K とすれば K(θi −θ0)となる出力が現れる。この位相差の値に応じて VCOの発振周波数が決まることになる。ブロック図 5.1では、フィルタの後から出力を取っているが、目的によって別の場所を
出力とする場合もある。このブロック図のような場合、フィルタの後から出力を取っているので、出力は入力信号の中の位相差から不要な信号を取り除いた信号となる。
PLLを考えるに当たって、簡単な回路から複雑な回路と変化させて説明する方が分かり易いので、ここでもそのような手順で説明を進めていく。
5.1.1 1次の PLL
まず始めに、最も簡単な 1次の PLLに付いて考える。そのブロック図を次の図 5.2に示す。1次の PLLは、位相検知器と電圧制御発振器から構成される。このブロック図を位相検知器における利得と発振器における式とを用いて書き直すと図 5.3のように与えら

26 第 5章 PLL
れる。この場合の入出力位相差は、次の式で与えられる。
Φout(s)Φin(s)
=KPKV
KPKV + s(5.1)
また位相誤差 Φin(s)−Φout(s)は次の式で与えられる。ここで入力位相を時間によって直線的に増加する関数とすると、つまり入力の周波数を ωi とすると、位相は ϕ = ωit と変化するので、そのラプラス変換は Φin(s) = ωi/s2 と与えられる。これから (5.2)式が与えられる。この式を見て判るように位相誤差を少なくするためには、回路のループ利得を上げなければならない。この式は、入力側の信号に対して、いくら PLLの利得を増加させても常に出力側において、位相差つまり周波数のずれが残ることを意味している。この様に位相誤差がそのままループ利得に直接関係してくるので、1 次の PLL はほとんど用いられることは無い。
Φerror = lims→0
s [Φin(s)−Φout(s)]
=ωi
ωloop(5.2)
ただしωloop = KPKV:ループ利得
図 5.2 1次の PLL 図 5.3 ブロック図
5.1.2 高次の PLL
この PLLは、図 5.3に示すように回路の途中にフィルタを入れることによって実現できる。フィルタが入ることにより、パラメータの選択に余裕が出て、より良い性能の PLL
を実現することが出来るようになる。この場合出力を図 5.3の出力を、フィルタの後ではなく VCOの後から取った場合の伝達関数は、次の様に与えられる。
Φout(s)Φin(s)
=KH(s)
KH(s)+ s(5.3)
ここでK = KPKV:フィルタ伝達関数
フィルタ伝達関数が、次の様に与えられた場合を考える。これは 1 次の RC 低域通過フィルタである。
H(s) =1
1+RCs(5.4)
5.1 PLLの基礎 27
この式を回路全体の伝達関数へ代入すると
Φout(s)Φin(s)
=KωRC
s2 +ωRCs+KωRC(5.5)
この式は、分母が sの 2次関数となる良く知られた式であるので、この関数の説明は省略する。また位相誤差は次の様になる。
Φout(s)Φin(s)
=s2 +2ςωns
s2 +2ςωns+ω2n
(5.6)
ここで
ς =
√ωRC/K
2ωn =
√KωRC
入力信号の周波数が直線的に変化する ϕ = ωit の場合、Φin(s) = ωi/s2 であるので、定常状態での位相誤差の値は、次の様に計算する事が出来る。
limt→∞
Φerror(t) = lims→0
sΦ(s)
= lims→0
sωi
s2s2 +2ςωns
s2 +2ςωns+ω2n
=ωi
K(5.7)
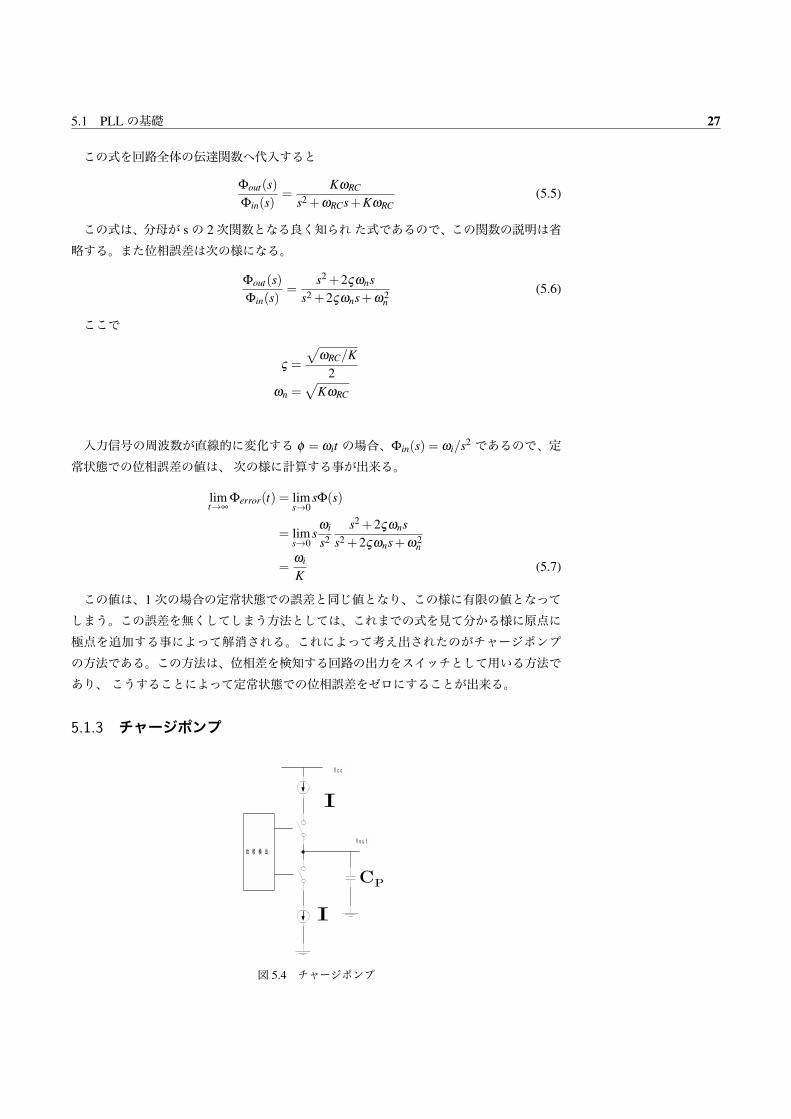
この値は、1次の場合の定常状態での誤差と同じ値となり、この様に有限の値となってしまう。この誤差を無くしてしまう方法としては、これまでの式を見て分かる様に原点に極点を追加する事によって解消される。これによって考え出されたのがチャージポンプの方法である。この方法は、位相差を検知する回路の出力をスイッチとして用いる方法であり、こうすることによって定常状態での位相誤差をゼロにすることが出来る。
5.1.3 チャージポンプ
図 5.4 チャージポンプ

28 第 5章 PLL
この図 5.4での電流源の値及び容量値を各々とすると、PLL全体の伝達関数は、次の様に与えられる。
Φout(s)Φin(s)
=τs
2πCPs2
KV I + τs+1(5.8)
この式から
limt→∞
Φerror(t) = lims→0
s [Φin(s)−Φout(s)]
= lims→0
ωiKV
I2πCP
s
s2
KVI
2πCP
+ τs+1
となり、誤差がゼロになる。
5.2 PLLにおける雑音ここでは PLLの様々な特性のうち雑音の問題について考える。PLLは色々なブロックから構成されており、それらのブロックにおける雑音の問題と、それらブロックを組み合わせた PLL全体としての雑音問題について取り扱う。
5.2.1 VCOにおける雑音
VCOにおける位相雑音は、主に f−2 雑音であり、これは白色雑音によって生じる。このことに関する説明は、白色雑音と理想的な雑音を含まない VCOとを考えることによって、簡単にモデル化でき(図 5.5参照)、出力の雑音電力スペクトラムは、次の様に与えられる。ここで制御信号には、雑音が含まれていないとしている。
Sϕout =
∣∣∣∣KV
jω
∣∣∣∣2 Sn(ω)
=K2
Vω2
N0
2(5.9)
ここでN02 :白色雑音の電力スペクトラム
5.2.2 1次の PLLに対する雑音
図 5.5 1次の雑音を含んだ場合の PLLブロック
位相検出器において雑音の発生は無いとすると、主な雑音源として VCOにおける雑音と入力側から入ってくる雑音とが考えられる。入力から入ってくる雑音は、VCOの雑音

5.2 PLLにおける雑音 29
と相関は無いので、出力側に現れる雑音は、これらの雑音の重ね合わせによって与えられる。入力側の雑音が無い場合には、VCOによる雑音のみとなり、雑音源からの伝達関数は、次の様に与えられる。
Φout(s)n(s)
=KV
KPKV + s(5.10)
これから
SΦout (ω) =N0
2K2
V(KPKV )2 +ω2 (5.11)
この式と VCOだけの (5.9)式とを比べると、低周波側で位相雑音が抑制されていることが判る。これは帰還ループとなることによりゆっくりと 変化する信号に対しては、抑圧が掛かることを意味している。この現象は位相ジッタと遅延との関係でも同じように現れる。この関係は次の式として与えられる。
σ2τ =
2π2NK2V
ω20
1ωloop
[1− exp(−ωloopτ)
](5.12)
ただしωlop:PLLの帯域幅ω0:PLLの中心周波数
これらの結果をグラフに描くと、次の図 5.6図 5.7のようになる。
図 5.6 入力雑音が無い場合:雑音スペクトラム
図 5.7 入力雑音が無い場合:ジッター
入力雑音があり、VCOには雑音が無い場合このとき、入力側の雑音が別の発振器によって生じた雑音とし、 f−2 雑音のみしか存在しないとすると、入力信号における雑音電力スペクトラムの値は、次の様に与えられる。
SΦin =αω2 (5.13)
この式を 1次の PLLの伝達関数に適用すると、次の様になる。
SΦin =αω2
(KPKV )2
(KPKV )2 +ω2 (5.14)
この雑音を図に示すと図 5.8図 5.9の様に描く事が出来る。

30 第 5章 PLL
図 5.8 VCO雑音が無い場合:雑音スペクトラム 図 5.9 VCO雑音が無い場合:ジッター
この雑音と、VCOだけの場合に計算した雑音との和が、共に雑音が存在する場合の出力雑音として与えられることになる。
SΦin =N0
2K2
V(KPKV )2 +ω2 +
αω2
(KPKV )2
(KPKV )2;ω2 (5.15)
2つの雑音のうちいずれが大きいかと言うことは、回路図によって異なる。入力側の雑音が小さい場合をグラフに描くと、次の図 5.10図 5.11のようになる。
図 5.10 低雑音入力における全雑音:雑音スペクトラム
図 5.11 低雑音入力における全雑音:ジッター
また逆の VCO側の雑音が小さい場合について描くと次の図 5.12図 5.13のようなグラフが得られる。高次の PLLに対する雑音は、これまでの結果を用いる事により簡単に導く事が出来るので、省略する。
図 5.12 低雑音VCOの出力雑音スペクトラム:雑音スペクトラム
図 5.13 低雑音VCOの出力雑音スペクトラム:ジッター

5.2 PLLにおける雑音 31
5.2.3 チャージポンプを用いたPLL
入力からの雑音についての出力雑音の式は、既に (5.9)式に与えられている。VCOの雑音のみ存在する場合の出力雑音は、これまでの結果を用いて、次の様に求められる。
Φout(s)n(s)
=2πCP
Iss2
KVI
2πCP+τs+1
(5.16)
図 5.14 チャージポンプを用いたPLL:入力雑音が無いときの出力雑音
図 5.15 チャージポンプを用いたPLL:低入力雑音の場合の出力雑音
次に周波数分割を行った場合におけるチャージポンプ PLLの雑音曲線を描いておく。
図 5.16 周波数分割を含んだチャージポンプPLL


33
第 6章
KUROKAWAの方法
これは BELL研究所の Dr. KUROKAWA[2]に拠る論文の要約である。
6.1 一般式次の簡単な回路について考える。
図 6.1 検証回路
図 6.1の回路から、次の式が得られる。
Ldidt
+(Ri +R0 −R)i+1C
∫idi = e(t) (6.1)
e(t) = 0のとき(6.1)式の電流は、正弦関数を用いて
i(t) = A1 cos [ωt +ϕ1]+A2 cos [2ωt +ϕ ]+ · · · (6.2)
e(t)の値が小さい場合(6.1)式の電流は、近似的に次の式の様に正弦関数の和で表されると仮定することが出来る。ただし振幅と位相は、時間の関数であるが周期の間ほとんど変化しない。
i(t) = A1(t)cos [ωt +ϕ1(t)]+A2(t)cos [2ωt +ϕ(t)]+ · · · (6.3)

34 第 6章 KUROKAWAの方法
このとき次の式が成立する。
didt
=−A1
(ω +
dϕ1
dt
)sin(ωt +ϕ1)+
dA1
dtcos(ωt +ϕ1)
+(slowly varing f unction)sin(2ωt +ϕ2)
+(slowly varing f unction)cos(2ωt +ϕ2)+ · · · (6.4)∫idt = ()sin(ωt +ϕ1)+
1ω2
dA1
dtcos(ωt +ϕ1)
+(slowly varing f unction)sin(2ωt +ϕ2)
+(slowly varing f unction)cos(2ωt +ϕ2)+ · · · (6.5)
この 2 つの式を (6.1) 式に代入して、sin(ωt +ϕ1) あるいは cos(ωt +ϕ1) を掛け時間 t
から t +T0 について積分して、高次の項を省略すると次の二つの式が得られる。(−ωL+
1ωC
)−(
L+1
ω2C
)=
2AT0
∫ t+T0
te(t)sin(ωt +ϕ)dt (6.6)(
L+1
ω2C
)+(Ri +R0 − R)A =
2T0
∫ t+T0
te(t)cos(ωt +ϕ)dt (6.7)
ここでR = 2
AT0
∫ t+T0t RAcos2(ωt +ϕ)dt
R:1サイクルでの平均抵抗
この二つの式が発振器の基本となる式である。一般的に Rは Aの関数であり、その関係は図 6.2のように表される。
図 6.2 Rと Aの関係図
定常状態での自由発振の場合には、 dA/dt = 0 , e(t) = 0の式が成立するので式より電流の大きさは、R と Ri +R0 の交点によって与えられる。そのときの振幅を A0 とする。A0 の点での接線を引き図 6.2のように KA0 を定める。A0 からの微少変化を ∆Aとすると
Ri +R0 − R = K∆A (6.8)
K の値が正の場合、|∆A|は、時間と共に指数関数で減少し、K の値が負の場合、 |∆A|は、時間と共に指数関数で増加する。

6.2 同期発振 35
6.2 同期発振(6.6) 式に e(t)a0 cos(ωst) を代入する。ここで a0 の値は十分に小さいとする。発振が同期しているならば、発振周波数も ωs でなければならない。このとき (6.6) 式の右辺は(a0/A)sinϕ と与えられる。厳密なことを言えば A は A0 では無いが、a0 が小さいのでA = A0 としても問題は無い。よって (6.6)式の右辺は (a0/A0)sinϕ と与えられる。定常状態では dϕ/dt = 0および ϕ =定数であるので、ϕ = ϕ0 , ωs = ω0 +∆ω0 と置くと (6.6)式から
∆ω0 =−a0
2LA0sinϕ0 (6.9)
sinϕ ≤ 1であるので
∆ω0 ≤a0
2LA0(6.10)
この式は発振可能性を示している。また次の式が成立しなければならない。
a0
2LA0cosϕ0 > 0 (6.11)
ここで L+1/ω20C ∼= 2Lを用いた。(6.7)式は定常状態のとき、次のように与えられる。
∆A0 =a0 cosϕ0
KA0(6.12)
(6.11)式から ∆A0 は正の値である。マイクロ波領域においては、電流や電圧よりも 電力が用いられる。同期している信号源に対する電力は、次の式のように表すことが出来る。
Ps =
(a0√
2
)2
4R0
−a2
08R0
(6.13)
自由発振の出力電力は、次の式で与えられる。
Po = R0
(A0√
2
)2
=R0A2
02
(6.14)
これらの式を (6.11)式へ代入して(∆ω0
ω0
)≤ 1
Q2ext
Ps
Po(6.15)
ここでQext =
ω0LR0

36 第 6章 KUROKAWAの方法
一般に出力電力の測定と同じように同期信号 の注入は、サーキュレータを通して行われる。この場合出力電力は R0(A2/2)によっては与えられない。サーキュレータに注入される電力を用いなければならない。電力波の概念によりこれは次のように与えられる。
P =|V −R0I|2
4R0(6.16)
ここでV は R0 の両端の電圧
V = E −R0I
=a0√
2−R0
A0 +∆A0√2
eiϕ0 (6.17)
以上から第一近似として、電力は次のようになる。
P = P0 +A0a0 cosϕ0
(R0
KA0− 1
2
)(6.18)
この式を見て判ることは電力 P は P0 より大きくも小さくもなると言うことである。また cosϕ0 がゼロに近づくと、電力 P は P0 に近づく。この状態は同期周波数が自由発振周波数から遠ざかるときに起こる。回路が最少電力になるように調整されているときK = 2R0/A0 であり、電力は第一近似として同期信号の注入によって変化を受けない。
6.3 自由発振における雑音雑音について議論を進めるために、(6.6) 式 (6.7) 式の右辺の積分は、雑音電圧 e(t) について展開されなければならない。方程式は線形であるため、重ね合わせの原理が成立する。このことを考慮して、e(t)を基本パルスに展開し、まず始めに一つのパルスについて考える。パルスを εδ (t − t0)と置く。ここで ε はパルスの強さであり、t0 はパルスが発生する時間である。ε と t0 は違うパルスが持つ値とお互いに独立である。しかし 1 周期におけるパルスの二乗平均は e(t)2 でなければならない。
12T
∫ T
−T
[∑εδ (t − t0)
]2 dt = e(t)2 (6.19)
εδ (t − t0)によって表される一つのパルスに対して、積分
2/T0
∫ t+T0
te(t)sin(ωt +ϕ)dt
は図??に示す高さ (2/T0)ε sin(ωt0 +ϕ)長さ T0 の方形パルスとなる。ϕ , Aの微少変化に対して T0 は短い時間であるので、このパルスは、(6.6)式 (6.7)式を用いた総ての実際的な目的に対して、t = t0 の場所の 2ε sin(ωt0 +ϕ)の強さを持つ関数の形の別なパルスと考えられる。
n1(t)を 2/T0∫ t+T0
t e(t)sin(ωt +ϕ)dt の総ての項を表すとすると、n1(t)は多くのパルスから構成されている。これらのパルスの二乗平均は、次の式のように表される。
12T
∫ T
−T
[∑2ε sin(ωt0 +ϕ)δ (t − t0)
]2 dt
=1T
∫ T
−T
[∑εδ (t − t0)
]2 dt (6.20)

6.3 自由発振における雑音 37
(6.19)式から
n1(t)2 = 2e(t)2 (6.21)
同様に 2/T0∫ t+T0
t e(t)cos(ωt +ϕ)dt の影響を n2(t)で示す。
n2(t)2 = 2e(t)2 (6.22)
さらに sin関数と cos関数の直交性から、次の結果が得られる。
n1(t)n2(t) = 0 (6.23)
同じような結果が、狭帯域雑音の表現式から得られる。
e(t) = e1(t)sin(ω0t +ϕ)− e2(t)cos(ω0t +ϕ) (6.24)
ここでe1(t) , e2(t):ゆっくりと変化する時間関数。
ϕ , Aを計算する準備が整った。ω = ω0 周波数である自由発振においては (6.6)式は
−2Ldϕdt
=1
A0n1(t) (6.25)
Aの値は、今まで議論してきたことから A0 の値とは違う。しかしその差は非常に小さく、上に与えた式の右辺分母の Aの値は A0 に置きかえることが出来る。これから
|ϕ( f )|2 = |n1( f )|2
4ω20 L2A2
0
=2|e|2
4ω2L2A20
(6.26)
ここで|n1( f )|2 , |e|2:単位帯域幅あたりの有効電圧の二乗の単位を持ち、f は −∞から
∞まで変化する。
次に振幅について考える。∆A = A−A0 として、(6.7)式より
2Ld∆Adt
+KA0∆A = n2(t) (6.27)
この式から
|∆A( f )|2 = |n2( f )|2
4ω2L2 +(KA0)2
=2|e|2
4ω2L2 +(KA0)2 (6.28)
通常のスペクトラムアナライザは、出力の波形のスペクトル密度を直接表示している。その表示を導くことにする。それを行うためのもっとも良い方法は、波形の自己相関関数を求め、その結果をフーリエ変換によってスペクトラム密度関数へ変換することである。

38 第 6章 KUROKAWAの方法
A(t) , ϕ(t)は、 (6.23)式からお互いに相関を持たないので、電流の相関関数 Ri(τ)は、容易に求めることが出来る。
Ri(τ) = A(t)A(t + τ)cos [ω0t +ϕ(t)]cos [ω0(t + τ)+ϕ(t + τ)]
=12[A2
0 +R∆A(τ)]
cos [ϕ(t + τ)−ϕ(t)] (6.29)
これから次の式が得られる。
Ri(τ) =12
{A2
0 +|e|2
2LKA0exp[−KA0
2L|τ|]}
• exp[− |e|2
4L2A20|τ|]
cosω0τ (6.30)
この式から KA0/2L ≫ |e|2/4L2A20 に注意して、次式のようになる。
|i( f )|2 =∫ ∞
−∞Ri(τ)e−iωτ dτ
=|e|2
8L2
1
(ω −ω0)2 +(
|e|24L2A2
0
)2 +1
(ω +ω0)2 +(
|e|24L2A2
0
)2
+
|e|2
8L2
1
(ω −ω0)2 +(
KA02L
)2 +1
(ω +ω0)2 +(
|e|24L2A2
0
)2
(6.31)
この結果は Edsonによって得られた。この式の中で、右辺第 1項は、FM雑音を表している。リミッターの掛かっている信号の出力スペクトラムは、この項を示している。また第 2項は AM雑音を示している。ω が ω0 の値に近いとき KA0/2L ≫ |e|2/4L2A2
0 となるので、第 1項の FM雑音が主な雑音である。しかし ω が ω0 から遠く離れると 2つの雑音は同じように寄与する。
R0 からの雑音の影響を無視すると、2R0|i( f )|2 は、発振器の出力電力密度関数 を与える。簡単にするため Ri を無視すると ω −ω0 ≪ ω +ω0 であるので
P( f ) =ω2
0
2Q2ext
N
1
(ω −ω0)2 +(
ω20
4Q2ext
)2N2
P20
+1
ω −ω0)2 +(
ω20
4Q2ext
)2N2
P20
(6.32)
ここでN = |e|2
2R
興味あることとして、同じ雑音源をもつ同じ値の負性抵抗値を用いた増幅器の最適な雑音測定値は、次のように与えられると言うことである。
Mopt =N
k×290◦(6.33)

6.4 同期発振器における雑音 39
ここでk:Boltsmann’s constant
6.4 同期発振器における雑音自由発振においては、ϕ は任意の値を取り得る。しかし同期発振においては、強制的な力が加わるため ϕ0 の近くに留まっている。ϕ = ϕ0 +∆ϕ A = A0 +∆Aと置く。ここで ∆ϕおよび ∆Aは、小さな値である。(6.6)式 (6.7)式から、次の結果が得られる。
−2Ld∆ϕdt
− a0
A0∆ϕ cosϕ0 =
1A0
n1(t) (6.34)
2Ld∆Adt
+KA0∆A+a0∆ϕ sinϕ0 = n2(t) (6.35)
これらの方程式から、次の式が得られる。
|∆ϕ( f )|2 = |n1( f )|2
4ω2L2A20 +a2
0 cos2 ϕ0
=2|e|2
4ω2L2A20 +a2
0 cos2 ϕ0(6.36)
|∆A( f )|2 = |n2( f )|2
ω2L2 +(KA0)2
+a2
0 sin2 ϕ0
4ω2L2 +(KA0)2|n1( f )|2
4ω2L2A20 +a2
0 cos2 ϕ0
=2|e|2
4ω2L2 +(KA0)24ω2L2A2
0 +a20
4ω2L2A20 +a2
0 os2ϕ0(6.37)
この式から分かることは、|ω |< (a0 cosϕ0/2LA0)の周波数範囲において、包絡線のふらつきは同期によって大きくなるが、位相のふらつきは小さくなると言うことである。電流 iのスペクトラム密度関数を計算するため、始めに自己相関関数 Ri(τ)を計算して
みる。 ∆ϕ と ∆Aの値が小さいとすると
Ri(τ) =12(A0 +∆A0)
2(1−∆ϕ 2)cosωsτ
+12
R∆A(τ)cosωsτ +12
A20R∆ϕ (τ)cosωsτ
+12
A0 sinωsτ(∆A(τ)∆ϕ(0)−∆A(0)∆ϕ(τ)) (6.38)

40 第 6章 KUROKAWAの方法
この式から、電流 iの密度関数を求めることが出来る。
|i( f )|2 = 14(A0 +∆A0)
2(
1− |e|2
2LA0
1a0 cosϕ0
)[δ ( f − fs)+(δ ( f + fs)]
+|e|2
8L2
1
(ω −ωs)2 +a2
0 cos2 ϕ04L2A2
0
+ similar term with (ω +ωs)
+
|e|2
8L2
1
(ω −ωs)2 +(
KA02L
)2
(ω −ωs)2 +
a20
4L2A20
(ω −ωs) 2+ a20 cos2 ϕ04L2A2
0
+similar term with (ω +ωs)]
+|e|2
8L2
ω −ωs
(ω −ωs)2 +(
KA02L
)2
a0 sinϕ0LA0
(ω −ωs) 2+ a20 cos2 ϕ04L2A2
0
+similar term with (ω +ωs)]
(6.39)
最初の項は、雑音が無いときの純粋のスペクトラム、2番目の項は FM雑音、3番目はAM雑音、最後の項は FMと AM雑音が入り混じった雑音を表している。比較することによって容易に分かるが、FM雑音は、(ω −ωs)
2 の値が大きいときの自由発振雑音と同じ値となる。しかし ω が ωs の値に近くなると同期の影響によって雑音は改善されてくる。それに対して AM雑音は、同期によっては改善されない。実際 cos2 ϕ0 の値は 1より小さいため、雑音の減少はわずかである。もし cos2 ϕ0 の値が小さいと、さらに同期発振周波数が同期範囲の端にあると、FM雑音及び AM雑音は非常に大きくなる。cos2 ϕ0 の値がゼロの場合、∆ϕ , ∆Aの値が小さいと言う条件が成立しなくなる。このときには、これまでの議論は成立しない。ωs と ω0 が一致しない場合、F M雑音と AM雑音の相互干渉は、ωs の側からもう一方の側へシフトする。この結果雑音スペクトラムは、 ωs に関して非対称となり、ωs から ω0 の方がより雑音レベルが大きい。
(6.39)式の最後の 3つの項に対する雑音パワー密度関数 Pn( f )は、次式のように与えられる。
Pn( f ) =ω2
0
2Q2ext
N[
1(ω −ωs)2 + |∆ω2
0 |max cos2 ϕ0
+1
(ω −ω0)2 +(
ω0Qext
)2(KA02R0
)2(ω −ωs)
2 + |∆ω0|2max
(ω −ωs)2 + |∆ω0|2max
+ω −ω0
ω −ω0)2 +(
ω0Qext
)2(KA02R0
)22|∆ω0|max sinϕ0
(ω −ωs)2 + |∆ω0|2max
(6.40)
この式は、十分に (6.32)式と比較されるべきである。
6.5 雑音同期信号実際問題、同期信号自身他の発振器において発生する。よって信号自身も雑音を受けている。雑音のスペクトラムは、既に前の節において述べた。 (a0 +∆a)cos(ωs +ψ)が同期

6.5 雑音同期信号 41
信号を表しているとすると、ψ は (6.26)式によって与えられるスペクトラム密度関数を持っている。次元と大きさを考えなければ ∆aは、(6.28)式によって与えられる値である。同期している信号源のパラメータと同期させられている発振器の値とを区別するため、同期している信号源に対しては、添え字 sを用いている。(6.6)式は、次のようになる。
−2L∆ω0 −2Ldϕdt
=a0 +∆a
Asin(ϕ −ψ)+
ni(t)A
(6.41)
同期している信号源の雑音は、同期させられている発振器の雑音と比較して大きくないと仮定する。また同期している信号は一般的に十分な減衰の跡に成長してくるとすると∆aからの寄与は無視することが出来る。この場合、第一近似を求めるには、上の式は、次のように変形することが出来る。
−2Ld∆ϕdt
− a0
A0∆ϕ cosϕ0 = 2L
dψdt
+n1(t)A0
(6.42)
ここでϕ = ψ(ω)+∆ϕ(ω)
(a0/A0)sin(a0/A0)sinϕ0 =−2L∆ω0
これから
(ϕ −ϕ0)(ω) = ψ(ω)+∆ϕ(ω)
=−ns1(ω)
jω2LsAs
(1− 2 jωLA0
2 jωLA0 +a0 cosϕ0
)− n1(ω)
2 jLA0 +a0 cosϕ0(6.43)
スペクトラム密度関数は、次の式となる。
|(ϕ −ϕ0)( f )|2 = 14ω2L2A2
0 +a20 cos2 ϕ0
[2a2
0 cos2 ϕ0
4ω2L2s A2
s|es|2 +2|e|2
](6.44)
ω がゼロに近づくと、この値は |ψ( f )| とほとんど同じ値になる。ω が大きくなると、同期している雑音の無い場合の (6.36)式の値に近づく。
(6.7)式から、振幅についての式は、次式となる。
2Ld∆Adt
+KA0(∆A0 +∆A) = a0 cos(ϕ −ψ)+n2(t) (6.45)
KA0∆A0 = a0 cosϕ0 の関係を用いると上の式は、次のようになる。
2Ld∆Adt
+KA0∆A =−a0∆ϕ sinϕ0 +n2(t) (6.46)
これから
|∆A( f )|2 = 14ω2L2+(KA0)2
[a2
0 sin2 ϕ0
4ω2L2A2o +a2
0 cos2 ϕ0
•(
LA0
AsAs2|es|2 +2|e|2
)+2|e|2
](6.47)
電流のスペクトラム密度関数を求めることは難しいが、(ω −ωs)が小さい場合 ψ からの雑音は、他の成分からの雑音に比べて支配的となる。よって (ω −ωs)が小さい場合、スペクトラムは同期している信号源の値に似ている。(ω −ωs) が大きい場合には前節で述べた値に近づく。

42 第 6章 KUROKAWAの方法
6.6 発振器の 1/ f 雑音1/ f 雑音の影響については完全に無視してきた。実際問題として、発振器は、真空管や半導体素子を含んでいるので、回路パラメータは時間と共にゆっくりとしたふらつきを示す。このふらつきのスペクトラムは、1/ f に比例している。この雑音は、一般の高周波増幅器に対してはそれ程重要な役割を 演じることは無いが、しかし発振器の場合は違っている。以前述べたように発振電流の位相及び振幅の振る舞いは、(6.6)式、(6.7)式によって与えられる。これらの方程式において、素子 L , C および R , X = (ωL−1/ωC)
の値は時間のふらつきを生じる。(6.6) 式についてこれらの影響を考えてみる。もし (
が−ωL+1/ωC =−X ふらついているとすると、そのふらつき ∆X は右辺に影響を与える。その結果 2番目の項もふらつくことになる。その影響は、(1/ω)(dϕ/dt)が小さいため無視することが出来る。∆X = nx(t)/Aとすると、nx(t)は電圧の次元を持ち、方程式は次のようになる。 (
−ωL+1
ωC
)−(
L+1
ω2C
)dϕdt
=2
AT0
∫ t+T0
te(t)sin(ωt +ϕ)dt +
nx(t)A
(6.48)
同様に (6.7)式は (L+
1ω2C
)dAdt
+(Ri +R0 − R)A
=2T0
∫ t+T0
te(t)cos(ωt +ϕ)dt +nR(t) (6.49)
ここでnR(t) = A∆R(t)
方程式 (6.48) 式 (6.49) 式は、1/ f 雑音を考えるときの ϕ , A に対する基礎方程式である。|nx(t)|2 と |nR(t)|2 は、共に 1/ f に比例する。一般に nx(t) と nR(t) は、以前導入した白色雑音の n1 , n2(t)に対して独立である。しかし nx(t)と nR(t)はお互いに関係しており、そのことは電流 |i( f )|2 の計算を難しくしている。一方位相と振幅のふらつきに対するスペクトラムの計算はそれ程難しくは無い。 例えば自由発振器における |ϕ( f )|2 と|∆A( f )|2 は、 |e|2 が各々 2|e|2 + |nx( f )|2 と 2|e|2 + |nR( f )|2 に置きかえるならば、そのまま使うことが出来る。周波数ふらつきのスペクトラム |dϕ/dt( f )|2 が白色では無いと言うことはあまり意味のあることではない。2|e|2 と |nx( f )|2 の相対的な大きさに依存して、スペクトラムは 3 [dB/octave]の急峻な傾きを示す。同期発振器における位相揺らぎの計算結果もまた、 2|e|2 を 2|e|2 + |nx( f )|2 に置きかえることによって得られる。よって 1/ f 雑音を考慮したとしても、位相のゆらぎは、同期によって大幅に改善される。振幅のゆらぎは、nx(t) と nR(t) の間に新しい関係をもたらす。振幅の揺らぎは、同期によって減少させられるかあるいは、二つの間を無関係とする。もしそれらの間が無関係であるならば、振幅のゆらぎは、同期によってそれよりも大きくなる。

43
第 7章
ISFによる解析
発振器における雑音の解析は、発振器の動作自体が非線形である為、常に困難を極める。雑音をインパルスの集まりだと考える ことによって、ある程度解析を進めることが可能になる。ここでは ISF(Impulse Sensitivity Function)による発振器の雑音解析について述べる。
7.1 初めに一つのインパルスが発振波形に重畳された場合を考える。このとき元の波形は、振幅と位相の変化を受ける。この変化はエネルギー等分配の法則に従って、 インパルスのエネルギー、が等しく振幅と位相に対して分配される。しかし多くの発振器は、振幅を別の回路で固定する様に設計されているので、インパルス・エネルギーの半分のみが発振振幅の位相に対して影響を与えるだけだとする。インパルスが入る場所の容量の値を C であるとすると、このインパルスは、∆V = ∆Q/C の電圧の変化を与える。ここでこの電圧の変化がそのまま発振波形の位相の変化に一次近似で 比例するとするならば、次の式が成立する。
∆ϕ = Γ(ω0τ)∆V
Vmax
= Γ(ω0τ)∆q
qmax(7.1)
ここでVmax はインパルスが入る所での発振振幅qmax は Vmax のときの電荷Γ(ω0τ):比例定数、Impulse Sensitivity Function
この式を見ると、どの様な雑音でも発振器の振幅に対して影響を与えることが分かる。つまり例えば低周波における 雑音も高周波における発振波形に対して影響を与えることになる。(7.1)式から、単位位相インパルス・レスポンスが、次のように与えられる。
hϕ (t , τ) =Γ(ω0τ)
qmaxu(t − τ) (7.2)

44 第 7章 ISFによる解析
この式を用いて、発振波形の位相変化は、次の式を用いて求めることが出来る。
ϕ(t) =∫ ∞
−∞hϕ (t , τ)i(τ)dτ
=∫ ∞
−∞
Γ(ω0τ)qmax
i(τ)dτ (7.3)
ここでi(τ):入力雑音電流
ここで出てきた ISFは、発振振幅が元々周期関数であるので、ISF自体も周期関数となる。よってフーリエ級数に展開することが出来る。
Γ(ω0τ) = c0 +∞
∑n=1
cn cos(nω0τ +θn) (7.4)
この式の中の位相は、雑音自体がランダムな 現象であるので、その位相は重要ではない。そこでこの位相を無視して、発振器の位相は (7.12) 式を (7.11) 式へ代入することにより、次のように与えられる。
ϕ(t) =1
qmax
[c0
∫ ∞
−∞i(τ)dτ +
∞
∑n=1
cn
∫ ∞
−∞i(τ)cos(nω0τ)dτ
](7.5)
7.1.1 雑音信号が正弦波信号で表現できると考えたとき
雑音電流が、次の式で表されると考えたときについて考える。
i(t) = I0 cos(∆ωt) (7.6)
このとき ∆ω ≪ ω0 であるとする。ここで ω0 は発振周波数であるとする。このときの位相は (7.13)式を利用すると
ϕ(t) =I0c0
qmax
∫ ∞
−∞cos(∆ωτ)dτ
=I0c0
qmax∆ωsin(∆ωt) (7.7)
次に発振周波数に近い信号を考える
ϕ = I1 cos [(ω0 +∆ω)t] (7.8)
この場合についても同様に計算を行うと
ϕ(t) =I1c1
2qmax∆ωsin(∆ωt) (7.9)
発振周波数の整数倍に近い周波数の雑音を考えると
ϕ(t) =Incn
2qmax∆ωsin(∆ωt) (7.10)
(7.7)(7.9)(7.10)式を比べると、∆ω が同じ値の信号は、周波数軸上の原点から全て同じ周波数の位置へ変換されていることが分かる。ただし nの値が大きくなるにつれ、フーリエ係数の値が小さくなるので、加算される振幅の大きさは小さくなる。

7.1 初めに 45
この場合発振器の振幅は、次式のように与えられるので、雑音による発振周波数の位相変化が小さい場合を考えると
cos [ω0t +ϕ(t)]∼= cos(ω0t)−ϕ(t)sin(ω0t) (7.11)
この式に (7.10)式を代入すると
cos(ω0t)− Incn
2qmax∆ωt sin(ω0t)(7.12)
と与えられる。この式を見ると基本波に対して上下対称な位置に信号が生じていることが分かる。そこで発振信号に対する側波帯の信号を考え、 それらの電力でその比を求めると、次のようになる。
PdBc(∆ω) =
(Incn
4qmax∆ω
)2
(7.13)
この式で、(7.7)式と (7.10)式とを比較すれば判るようにの場合には、分母の係数が 4
ではなく 8となることに注意しなければならない。
7.1.2 雑音信号がランダムな信号と考えたとき
まず初めに雑音振幅が周波数によらず一定の値である場合を考える。そうすると単位周波数あたりの電流記号を用いた電力スペクトルは、i2/∆ f のように与えられる。(7.21)式で用いた電流 I0 はピーク値として用いているので、次の関係が得られる。
i2n∆ f
=I2n
2(7.14)
発振周波数の整数倍の所にある雑音は、発振信号の位相に大して 2倍の影響を与える。これは先の説明から分かるように、発振周波数の整数倍の所の信号の両サイドが位相に対して同様の影響を与えるためである。よって (7.13)式に相当する式として、次の結果が得られる。
PdBc =
i2n∆ f ∑∞
n=0 c2n
4q2max(∆ω)2 (7.15)
ここで、次の Parsevalの定理を用いる。∞
∑n=0
c2n =
1π
∫ 2π
0|Γ(x)|2dx
= 2Γ2rms (7.16)
この式を用いると (7.15)式は、次のように変形することが出来る。
PdBc =Γ2
rms
q2max
i2n/∆ f2(∆ω)2 (7.17)
この式を見て判るように、雑音位相は、周波数の二乗の逆数に比例して変化する。この理論にデュアルな性質として、インダクタンスによる場合も考えられ、この場合にはインダクタンスのフラックスが現れ、最終的には、次の式が得られる。
PdBc =Γ2
rms
p2max
v2n/∆ f
2(∆ω)2 (7.18)

46 第 7章 ISFによる解析
ただしpmax = LImax:磁気フラックス
7.2 位相ジッタ-位相ジッタ-は、次の式によって定義される。
σ2∆ϕ = E
(∆ϕ 2
τ)
= E{[ϕ(t + τ)−ϕ(t)]2
}(7.19)
ここでE:期待値を示す演算子
この式に対して (7.3)式を用いると
σ2∆ϕ =
1q2
max
∫ τ
0
∫ τ
0Γ(ω0t1)Γ(ω0t2)E [i(t1)i(t2)]dt1dt2 (7.20)
白色雑音に対して、自己相関関数は
E [] =12
i2n∆ f
δ (t1 − t2) (7.21)
と与えられるので、(7.20)式は、次のようになる。
σ2∆ϕ =
12
i2n/∆ fq2
max
∫ τ
0Γ2(ω0t1)dt1 (7.22)
この式は、τ ≫ T あるいは τ = mT (ただし m は整数) の場合には、簡単に次の式となる。
σ2∆ϕ =
12
i2n/∆ fq2
maxΓ2
rms|τ| (7.23)
7.2.1 1/ f 雑音の影響
これまでは白色雑音について取り扱ってきた。 ここでは低周波での雑音の代表である1/ f 雑音がどの様に発振器の雑音に対して影響を与えるかと言うことについて考える。今までの検討から、発振器の雑音は周波数に対して二乗の雑音特性を持っていることが判ったが、発振器の雑音はこれ以外に周波数に対して 3 乗の特性を持った雑音も含まれている。この 3乗の特性はここで述べる 1/ f 雑音から出てきている。このことを説明するために、まず 1/ f 雑音が次の式で与えられることから始める。こ
の式は ∆ω = ω1/ f のとき、白色雑音と 1/ f 雑音とが同じ値になるように選んでいる。
in , 1/ f = i2nω1/ f
∆ω(7.24)
ただし∆ω ≤ ω1/ f

7.2 位相ジッタ- 47
ω1/ f:1/ f 雑音のコーナー周波数
この式と (??)式から、次の結果が得られる。
PdBc =c2
0q2
max
i2n/∆ f2(∆ω)2
ω1/ f
∆ω(7.25)
この式の中で ISFのゼロ次の係数だけが選ばれているのは、必ず ∆ω ≤ ω1/ f ≤ ω0 の関係が成立するので、ISFのフーリエ展開の直流の項だけしか生じないためである。この式と (7.18)式から周波数スペクトル ∆ω = ω1/ f の点では、2つの式は等しくなければならないので、そのときの周波数を ω1/ f と置くと、次の式が成立しなければならない。
ω1/ f = ω1/ f
(c0
Γrms
)2
(7.26)
この式から判ることは、発振波形が上下対称で、つまり ISFの直流成分が少ないほど、雑音のパワー・スペクトルのコーナー周波数が低くなるということである。(7.26)式を用いると、(7.25)式は次の様になる。
PdBc =c2
0q2
max
i2n/∆ f2(∆ω)2 Γ2
rmsω1/ f (7.27)
7.2.2 サイクロステーショナリ雑音の場合
サイクロステーショナリ雑音とは、新しい雑音 の種類と言うよりも回路によって作られた特殊な雑音のことであり、その名の通り周期的に現れる雑音のことを意味している。この様な雑音が現れる場合と現れない場合とで、見かけ上雑音の性質が違ってくるのであれば、どの様な場合によって分けられるかを明確にする必要がある。この問題に対する解答は、次に述べる。ここで言うところのサイクロステーショナリ雑音は、ある時間区間のみ雑音源を持つ素
子が動作し、その他の区間ではカットオフしているような発振器の場合に生じ、あたかもバースト上の雑音波形となる場合を指している。それに対して、今まで出てきた雑音は、常に雑音源を持つ素子が能動状態で動作する発振器の場合を取り扱っていることになる。サイクロステーショナリ雑音の例として、発振器の中のMOSトランジスタによるチャネル雑音のエネルギーは、周期的に変化するゲート・ソース間電圧によって変調を受ける場合などが、その例である。このチャネル雑音は、トランジスタに流れる電流によって変化するので、発振器の動作状態によって大きく影響を受ける。それに対して抵抗などで発生する雑音は、時間や回路の動作によって影響を受けないので、ステーショナリ雑音と呼ばれる。
Colpitts発振器が強い非線形の状態で動作している場合には、ある過渡的な場合においてのみ能動素子に電流が流れ、そのほかの場合には、ほとんど電流が流れないということが生じる。この様な動作をしている場合でのショット雑音は、電流が流れている期間のみ発生する。この様な場合の白色サイクロステーショナリ雑音電流は、次のように表現される。
in(t) = in0 ×α(ω0t) (7.28)

48 第 7章 ISFによる解析
ここでin0(t):白色ステーショナリ雑音α(ω0t):noise modulation function(NMF)
この式の中のNMFは i2n/∆ f = ¯i2n0/∆ f となるように規格化される。
このときの位相変化は、(7.3)式を用いて
ϕ(t) =∫ t
−∞in(τ)
Γ(ω0τ)qmax
dτ
=∫ t
∞in0
α(ω0τ)Γ(ω0τ)qmax
dτ
=∫ t
−∞in0(τ)ΓNMF(ω0τ)dτ (7.29)
ただしΓNMF(ω0τ) = Γ(ω0τ)×α(ω0τ)
このサイクロステーショナリ雑音は、Colpitts発振器において非常に重要である。この雑音が存在することにより、存在しない場合に比べて発振器全体の雑音が見かけ上小さくなるからである。それに対して Ring Oscillatorの場合、それほど重要な要因ではない。Ring Oscillatorの場合は、最大の電流、最大のISFさらに最大の雑音電力で動作するからである。またこの発振器においては ΓNMF ∼= Γとなる。このことから位相雑音に関してRing Oscillatorは Colpitts発振器に比べて劣っている。
7.2.3 容量の電圧依存性
容量の値は、その容量に印可される電圧によって変化する場合がある。とくに ICの中で用いられている接合容量などは、大きな電圧依存性を持っている。そこで電圧が周期的に変化する場合、その容量値を次の様に置いてみる。
C(ω0t) =Cmaxβ (ω0t) (7.30)
ここでCmax:最大容量値β (ω0t):最大値 1を持つ定数 capacitor modulation function(CMF)
この式を用いて、位相雑音を求めると
ϕ(t) =∫ t
−∞in(τ)
Γ(ω0τ)VmaxC(ω0τ)
dτ
=∫ t
−∞in0(τ)
Γ(ω0τ)qmaxβ (ω0τ)
dτ
=∫ t
−∞in0(τ)
ΓCMF(ω0τ)qmax
dτ (7.31)
ただしΓCMF(ω0τ) = Γ(ω0τ)
β (ω0τ)

7.3 発振振幅の影響 49
サイクロステイショナリ雑音と電圧依存性容量が同時に起こる場合の ISFは、次の式で与えることが出来る。
Γe f f (x) = Γ(x)α(x)β (x)
(7.32)
同様な式の展開が、インダクタンスの場合についても行うことが出来る。
7.3 発振振幅の影響ここでは今まで無視してきた、発振振幅の 影響について考える。発振周波数の近傍における雑音は、常に位相雑音によって影響を受けるが、発振周波数から離れた所での雑音は、振幅雑音によって影響を受ける。雑音が回路のある部分に対して電荷 ∆qのインパルスの形で影響を受けたとき、振幅が受ける影響は次の式で近似することが出来る。
∆A = Λ(ω0t)∆V
Vmax
= Λ(ω0t)∆q
qmax(7.33)
ここでΛ(ω0t):amplitude Impulse Sensitivity Function
位相の場合と同様に、次の式が成立する。
hA(t , τ) =Λ(ω0t)
qmaxd(t − τ) (7.34)
ここでd(t − τ):振幅の減少を示す関数
ここで共振回路のエネルギー変化を考えると、次の様に近似される。
dEdt
=Eactive −Ediss
T(7.35)
ここでEactive:共振回路へ入り込むエネルギーEdiss:共振回路で消滅するエネルギーT:発振の周期
定常状態では、この式の右辺はゼロとなるが、今 ∆E のエネルギーが注入された場合を考える。また回路の Qは、次の式で定義されるので
Q = 2πEstored
Ediss(7.36)
ここでEstored:共振回路の全エネルギー

50 第 7章 ISFによる解析
(7.35)式の差分を考え、(7.36)式を用いると次の様になる。
d(∆)dt
=−ω0
Q∆E (7.37)
雑音が存在する場合には、Estored の値が ∆E だけ増えることとなり、その他の値は一定値となることに注意すれば、(7.37)式が得られることが分かる。この式を積分すると、次の結果が得られる。
∆E = ∆0 × exp(−ω0τ
Q
)×u(t − τ) (7.38)
ここで LC共振器のエネルギーを考えると
E =C2(Vmax +∆V )2 (7.39)
この式を展開して、二次の微小を無視すると
∆E = E − C2
V 2max
=CVmax∆V +C2(∆V )2
∼=CVmax∆V (7.40)
この式での ∆V は、雑音が入ったときの振幅の増加を意味しているので、そのことを考慮して (7.40)式を (7.38)式へ代入すると、次の様になる。
∆A = ∆A0 exp(−ω0τ
Q
)×u(t − τ) (7.41)
この式から、次の結論が得られる。
d(t − τ) =∆A∆A0
= exp(−ω0τ
Q
)×u(t − τ) (7.42)
この式と (7.34)式を用いて、振幅は次の様に計算することが出来る。
A(t) =∫ t
−∞
i(τ)qmax
Λ(ω0τ)exp[−ω0(t − τ)
Q
]dτ (7.43)
白色雑音の場合について、具体的に計算してみる。 白色雑音の場合にはパワースペクトラム密度は i2n/∆ f で与えられるので、振幅雑音の出力スペクトラムは、次の式で与えられる。
PdBc(∆ω) =Λ2
rms
q2max
i2n/∆ f
2[
ω20
Q2 +(∆ω)2] (7.44)
ここでΛrms:Λ(ω0t)の二乗平均値
under dampingの場合には、正弦波成分が含まれるので (7.42)式は、次の様になる。
d(t − τ) = exp[−ω0(t − τ)
Q
]× cos [ω1(t − τ)]×u(t − τ) (7.45)

7.3 発振振幅の影響 51
ここでω1:振幅応答の自然周波数
このときには、雑音特性はピークを持つ様になる。これらの二つの場合についてのグラフを、次の図 7.1図 7.2に示しておく。
図 7.1 (7.44)式の図
図 7.2 (7.45)式の図
7.3.1 白色雑音と 1/ f 雑音の合成
この二つの雑音を表す式は、(7.17)(7.27) 式の対数をとって加え合わせることにより得られる。対数を取るのは周波数が低い場合の白色雑音の影響を少なく見積もるためである。
Ltotal = 10log
[Gamma2
rms
q2max
2n/∆ f
2(∆ω)2
]+10log
[c2
0q2
max
i2n/∆ f2(∆ω)2
ω1/ f
∆ω
](7.46)
この式は、LRC共振回路の場合、次の様に変形することが出来る。
Ltotal ∼= 10log
{4Γ2
rmskTPS
[1+(
ω0
2Q∆ω
)2](
1+c2
0Γ2
rms
ω1/ f∆ω
)}(7.47)
上の式において、右辺最初のかっこの中の定数 1をゼロと置くことにより (7.46)式と同じ値になることを証明することが出来る。この 1の値は通常もう一方の項に対して非常に
52 第 7章 ISFによる解析
小さい。ただしここで次の関係を利用している。
i2n∆ f
= 4kT G (7.48)
qmax =CVmax (7.49)
PS =GV 2
max
2(7.50)
Q = ω0CR (7.51)
7.4 Ring Oscillator
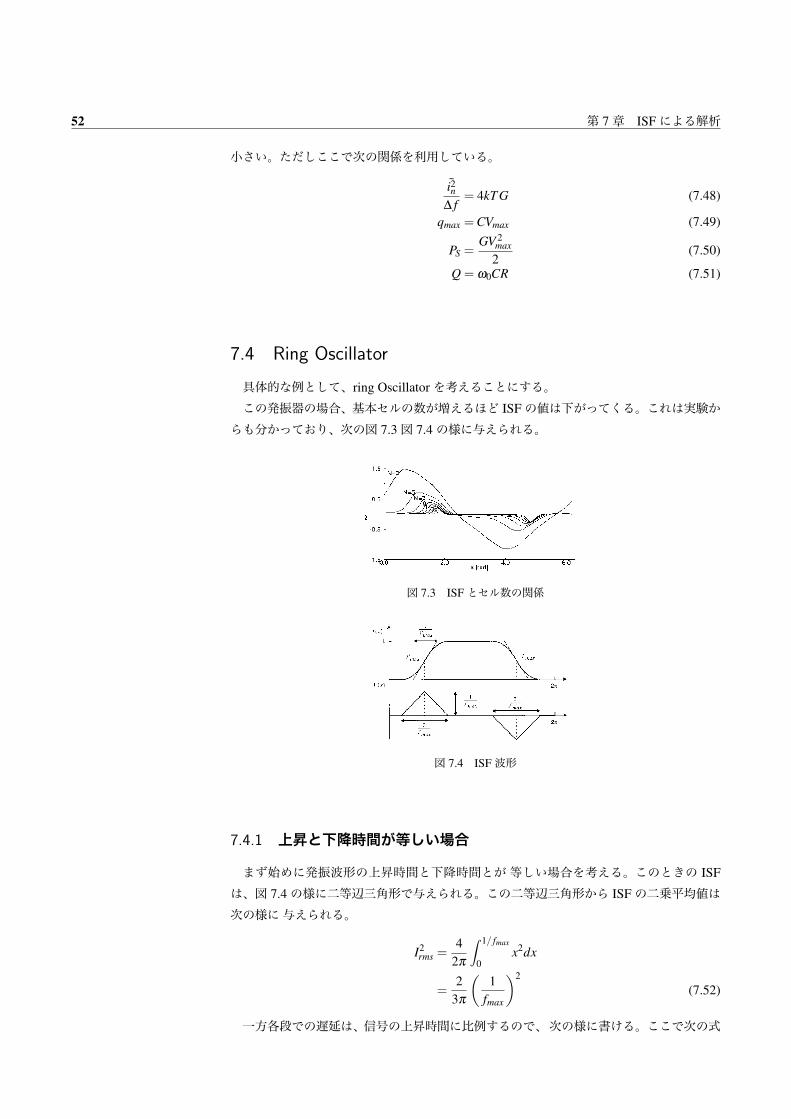
具体的な例として、ring Oscillatorを考えることにする。この発振器の場合、基本セルの数が増えるほど ISFの値は下がってくる。これは実験からも分かっており、次の図 7.3図 7.4の様に与えられる。
図 7.3 ISFとセル数の関係
図 7.4 ISF波形
7.4.1 上昇と下降時間が等しい場合
まず始めに発振波形の上昇時間と下降時間とが 等しい場合を考える。このときの ISF
は、図 7.4の様に二等辺三角形で与えられる。この二等辺三角形から ISFの二乗平均値は次の様に与えられる。
I2rms =
42π
∫ 1/ fmax
0x2dx
=2
3π
(1
fmax
)2
(7.52)
一方各段での遅延は、信号の上昇時間に比例するので、次の様に書ける。ここで次の式

7.4 Ring Oscillator 53
の遅延は、周期で規格化されているとする。
τD =η
fmax(7.53)
全回路の遅延はこの値の 2N 倍となるので、次の式が成り立つ。
2π = 2NτD =2Nηfmax
(7.54)
この式と (7.1)式を用いると
Γrms =
√2π2
3η3 × 1N1.5 (7.55)
7.4.2 上昇と下降時間が等しくない場合
この場合の ISF波形は次の図の様になる。
図 7.5 ISF波形
この図における ISFの二乗平均値は、次の様に与えられる。
Γ2rms =
1π
(∫ 1/ frise
0x2dx+
∫ 1/ f f all
0x2dx
)=
13π
(1
frise
)3 (1+A3) (7.56)
ただしA = frise
f f all
N 段の周期は次の様になる。
2π = ηN(
1frise
+1
f f all
)=
ηNfrise
(1+A) (7.57)
この式と (7.56)式とから、ISFの二乗平均値は、 frise を消去して次の様になる。
Γ2rms =
8π2
3η31
N3
[1+A3
(1+A)3
](7.58)
54 第 7章 ISFによる解析
同様にして、図 7.6より ISFの直流成分は、次の様に計算することが出来る。
Γdc =2πη2
1N2
(1−A1+A
)(7.59)
また 1/ f 3 コーナー周波数は、(7.24)式を用いて、次の様に求められる。
f1/ f 3 = f1/ f3
2ηN(1−A)2
1−A+A2 (7.60)
この式から判るように Aの値が 1に近づくと、1/ f 3 コーナー周波数はゼロとなる。つまり発振波形の上昇時間と下降時間とが等しくなると、1/ f 3 コーナー周波数は、ゼロとなることが分かる。また発振段数が増えてもその値はゼロに近づく。
7.4.3 Ring Oscillatorのジッター及び位相
ここでは、ジッター位相雑音を電力消費や 周波数などを用いて表現する式を求める。ショート・チャネル、ロング・チャネルの CMOSのドレイン電流雑音スペクトラム密度は、一般に次の式によって与えられる。
i2n∆ f
= 4kT γgd0
= 4kT γµCOXWL
∆V (7.61)
ここでγ:ロング・チャネルの場合 2/3、ショート・チャネルの場合その 2 ∼ 3倍gd0:ゼロバイアス・ドレイン-ソースコンダクタンスµ:移動度COX:単位面積あたりのゲート酸化膜容量L:チャネル長W:チャネル幅∆V:ゲート電圧オーバードライブ
ここで同じ長さのNMOS、PMOSトランジスタから構成されている single-ended CMOS
ring Oscillatorを考える。さらに VT N とする。回路の入出力点は、VDD/2の電圧値の所だとすると、全最大雑音は、次の様に与えられる。
i2n∆ f
=
(i2n∆ f
)N
+
(i2n∆ f
)P
= 4kT γe f fCOXWe f f
L∆V (7.62)
ただしWe f f =WN +WP
µe f f =µNWN+µPWP
WN+WP
∆V = VDD2 −VT
7.4 Ring Oscillator 55
1周期の間に各々の節点は電荷 qmax が蓄積され、ゼロまで放電される。N 段の single-
ended ring osccilatorにおいてこの工程の間に消費される電力は、
Nqmax
TVDD = NqmaxVDD f0
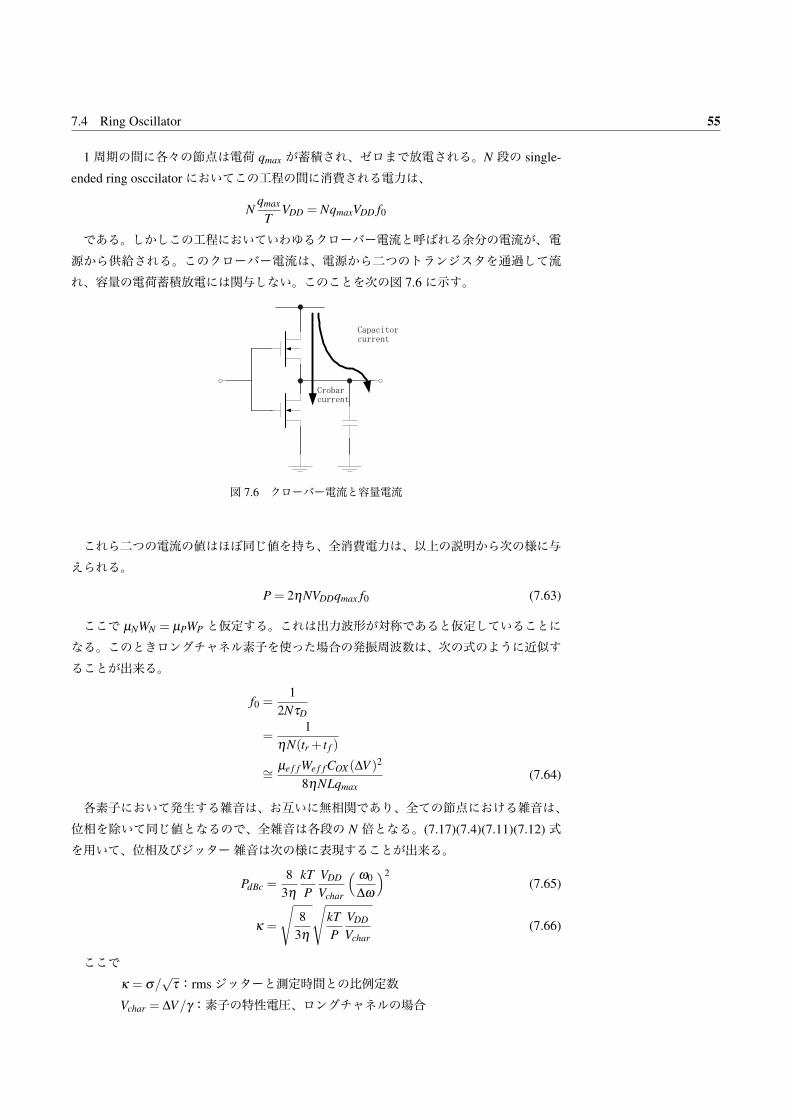
である。しかしこの工程においていわゆるクローバー電流と呼ばれる余分の電流が、電源から供給される。このクローバー電流は、電源から二つのトランジスタを通過して流れ、容量の電荷蓄積放電には関与しない。このことを次の図 7.6に示す。
図 7.6 クローバー電流と容量電流
これら二つの電流の値はほぼ同じ値を持ち、全消費電力は、以上の説明から次の様に与えられる。
P = 2ηNVDDqmax f0 (7.63)
ここで µNWN = µPWP と仮定する。これは出力波形が対称であると仮定していることになる。このときロングチャネル素子を使った場合の発振周波数は、次の式のように近似することが出来る。
f0 =1
2NτD
=1
ηN(tr + t f )
∼=µe f fWe f fCOX (∆V )2
8ηNLqmax(7.64)
各素子において発生する雑音は、お互いに無相関であり、全ての節点における雑音は、位相を除いて同じ値となるので、全雑音は各段の N 倍となる。(7.17)(7.4)(7.11)(7.12)式を用いて、位相及びジッター雑音は次の様に表現することが出来る。
PdBc =8
3ηkTP
VDD
Vchar
( ω0
∆ω
)2(7.65)
κ =
√8
3η
√kTP
VDD
Vchar(7.66)
ここでκ = σ/
√τ:rmsジッターと測定時間との比例定数
Vchar = ∆V/γ:素子の特性電圧、ロングチャネルの場合
56 第 7章 ISFによる解析
スレッショルド電圧が小さくなると位相雑音 が小さくなるので、回路が対称でスレッショルド電圧がゼロとなる極限において、位相雑音は最小値となり、そのときの値は次の式のように与えられる。またこれらの式を見て分かる様に、発振器の段数には依存しないことに注意しなければならない。
PdBc >16γ3η
kTP
( ω0
∆ω
)2(7.67)
κ >
√16γ3η
√kTP
(7.68)
7.4.4 ショート・チャネルの場合
この場合にも同じように計算することが出来る。このときのドレイン電流は、次の様に与えられる。
ID =µCOX
2WEC∆V (7.69)
ここでEC:critical electrical field;低い電界のときの移動度が半分の大きさになる時の
電界この式と (7.62)式から
i2n∆ f
= 8kTγID
ECL(7.70)
また発振周波数は次の様になる。
f0 =1
2NtD
=1
ηN(tr + t f )
∼=µe f fWe f fCOX (∆V )2
8ηNLqmax(7.71)
位相雑音やジッタ雑音は、(7.71)式を (7.65)(7.66)式に用いることによって与えられる。ただし次の値を用いなければならない。
Vchar =ECL
γ(7.72)
7.5 差動 CMOS ring oscillators
差動MOS ring oscillatorの場合における全電力消費は、次の様になる。
P = NItailVDD (7.73)
ここでN:セルの段数Itail:差動回路の tail電流

7.5 差動 CMOS ring oscillators 57
VDD:電源電圧
また発振周波数は、近似的に次の様に与えられる。
f0 =1
2NtD
=1
2ηNtr
∼=Itail
2ηNqmax(7.74)
発振周波数近辺の tail電流による雑音は、位相雑音に対して影響を与えないが、発振周波数の偶数整数倍近辺での雑音の様に、低周波雑音が位相雑音に影響を与える。この場合の回路を対称に動作させることによって、雑音を最小にすることが出来る。次の回路を考え、その全電流雑音を考えると次の様に与えられる。
図 7.7 差動セル
i2n∆ f
=
(i2n∆ f
)N
+
(i2n∆ f
)Load
= 4kT Itail
(1
Vchar+
1RLItail
)(7.75)
ここでVchar =
VGS−VTγ :ロングチャネルの場合
Vchar =ECL
γ :ショートチャネルの場合
またこのときの位相雑音、ジッター雑音は次の様になる。
PdBc =8
3ηN
kTP
(VDD
Vchar+
VDD
RLItail
)( ω0
∆ω
)2(7.76)
κmin =
√8
3η
√N
kTP
(VDD
Vchar+
VDD
RLItail
)(7.77)
この場合には single-ended ring oscillatorと違って、セルの段数に対する依存性がある。

58 第 7章 ISFによる解析
7.5.1 バイポーラー差動 ring oscillator
この場合も消費電力は (7.73)式で、発振周波数は (7.74)式で表される。全雑音電流は、コレクタ・ショット雑音と負荷抵抗による雑音の和によって表される。
i2n∆ f
= 2qIC +4kT
R
= 4kT Itail
(1
Vchar+
1RLItail
)(7.78)
ここでq:素電荷Vchar =
4kTq :コレクタ電流
この結果を用いて、位相雑音とジッター雑音は (7.76)(7.77)式とで与えられる。
7.5.2 雑音間の関係
違う節点における雑音は、その間に強い相関が存在する場合がある。例えばサブストレートや 電源に存在する雑音である。これらの雑音は、回路のスイッチング動作によって違った場所に現れる。その例として、次の図 7.8に示すような同じ雑音が違った場所に加わる場合について考えてみる。
図 7.8 相関がある時の雑音
ここで使われているインバーターが同じものであるとき、違う点での ISFの値は位相が違うだけである。回路全体ではなので、その位相差はセルの段数を N とすると 2π/N
であるので、この図 7.8の場合には 2π/5となる。全ての雑音源に対する回路全体の位相は、一般的に次の様に与えられる。
ϕ(t) =1
qmax
N−1
∑n=0
∫ t
−∞i(τ)Γ
(ω0τ +
2πnN
)dτ
=1
qmax
∫ t
−∞i(τ)
[N−1
∑n=0
Γ(
ω0τ +2πnN
)]dτ (7.79)
この式をフーリエ展開すると、次のような式が得られる。
ϕ(t) =N
qmax
∞
∑n=0
c(nN)∫ t
−∞i(τ)cos(nNω0τ)dτ (7.80)
7.5 差動 CMOS ring oscillators 59
この式を見て分かることは、完全に相関がある雑音源の場合には、Nω0 の整数倍近辺の雑音だけが位相に対して影響を与えることを意味している。

60 第 7章 ISFによる解析

61
第 8章
多次元の雑音空間
雑音源が一つだけではなく多数存在する場合には、多次元での雑音解析が必要になる。当然この場合での数学的手法としては、行列式による計算を行わなくて はならない。またこのとき取り扱う回路方程式として状態変数による取り扱いが便利である。よってここでは、状態変数による回路表現を用いて多次元の雑音解析について取り扱う。
8.1 雑音空間の表現多次元の雑音空間を表現する方程式は、状態変数法で表現するほうが便利であり、一般的に次の式で与えられる。
X = f [X(t)]+b(t) (8.1)
ここで
X(t) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
x1(t)
x2(t)
···
xn(t)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣関数 f は非線型の状態ベクトル関数であり、 bはシステムへの外部からの入力である。外部入力が無い場合、このシステムは周期関数となり、リミットサイクルで表現される。状態変数としては、通常の状態変数法と同じ容量の電圧、コイルに流れる電流が用いられる。また外部入力としては、容量に並列接続された電流源、あるいはコイルに直列接続さ

62 第 8章 多次元の雑音空間
れた電圧源が用いられる。よって各々の変数は、次のように表現することができる。
X(t) =
∣∣∣∣∣∣∣∣∣∣∣∣
VC1(t)IL1(t)···
VCk(t)
∣∣∣∣∣∣∣∣∣∣∣∣(8.2)
b(t) =
∣∣∣∣∣∣∣∣∣∣∣∣
iC1(t)vL1(t)
···
iCM(t)
∣∣∣∣∣∣∣∣∣∣∣∣(8.3)
インパルスがあったときの出力波形の位相変化は、次の式のように与えられる。
∆ϕ = w(∆q1 , · · · , ∆qM ; ∆p1 , · · · , ∆pN)
= w(∆X) (8.4)
変化が非常に小さいとして、この式を Tayler展開する。
∆ϕ =M
∑i=1
∆qi∂w
∂∆qi+
N
∑i=1
∆pi∂w
∂∆pi+O2(∆q , ∆p)
= ∆X•∇∆q , ∆pw+O2(∆X) (8.5)
位相インパルス応答は、次のように表すことが出来る。
hϕ (t , τ) = g(ω0τ)u(t − τ) (8.6)
ここで
g(x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Γ1(ω0τ)/ [C1(τ)•V1]
Γ2(ω0τ)/ [L2(τ)• I2]
···
Γ2(ω0τ)/ [Cn(τ)•Vn]
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣:周期の周期関数
Γ1(ω0τ):インパル応答関数(ISF)
この式から位相は、重ね合わせの原理から計算することが出来る。
ϕ(t) =∫ t
−∞bT (τ)g[ω0τ +ϕ(t)]dτ (8.7)
実際の発振器において ϕ(t)≪ ω0t となるので、上の式は、次のように簡単な形で表現することができる。もちろん信号が小さくない場合には、この式を用いることは出来ない。
ϕ(t) =∫ t
−∞bT (τ)g(ω0τ)dτ (8.8)
g(x)は、フーリエ級数の形に展開することが出来る。
g(t) =∞
∑n=0
cn cos(nω0t +θn) (8.9)

8.2 多次元確立過程雑音による位相雑音 63
この式を用いると、位相は次の式として与えられることになる。
ϕ(t) =∞
∑n=0
∫ t
−∞bT cn cos(nω0t +θn) (8.10)
8.2 多次元確立過程雑音による位相雑音この節では、多次元雑音の問題を具体的に サイクロ・ステーショナリな雑音ベクトルに対して適用し、次に 1/f雑音の問題へと拡張する。全てのサイクロステーショナリ雑音は、発振器の周波数と同じ周期を持っているので、これらの雑音は状態変数と関係がある。よってノード電圧と枝電流の時間移動量は、サイクロ・ステーショナリ電源の時間移動量と同じになる。定量的にこの量を見積もるため、任意のサイクロ・ステーショナリ雑音ベクトルを次のように表現する。
b(t) = α(ω0t)b0(t) (8.11)
ここでα(ω0t):n×n行列b0(t):noise modulation matrix
入力信号源 b(t)に対する correlation行列は
Rb(t1 , t2) = E[b(t1)bT(t2)
](8.12)
これら二つの式から、共分散行列は、次のように書ける。
Rb(t1 , t2) = α(t1 , t2)R0(t1 , t2)αT (t1 , t2) (8.13)
関数 Ψ(t)を次のように定義する。
Ψ(t) = bT(τ)g(ω0τ) (8.14)
この式を用いて (8.7)式は
ϕ(t) =∫ t
−∞Ψ(τ)dτ (8.15)
関数 Ψ(t)の自己共分散関数は、次のように与えられる。
RΨ(t1 , t2) = E [Ψ(t1)Ψ(t2)]
= E[|bT(t1)g(ω0t1)| |bT(t2)g(ω0t2)|
](8.16)
この式は、次のように書き換えることが出来る。
RΨ(t1 , t2) = g T(ωt1)αT (ω0t1)R0(t1 , t2)α(ω0t2)g(ω0t2)
= gTeff(ω0t1)R(t2 −T1)geff(ω0t2) (8.17)
ここで geff(ω0t) = α(ω0t)g(ω0t)(8.16)式は、次のように書くことも出来る。
RΨ(t1 , t2) = Tr[G(t1 t2)R(t2 − t1)
](8.18)
64 第 8章 多次元の雑音空間
ここで Tr:行列式の対角線上の要素の和
G(t1 , t2) = geff(ω0t1)gTeff(ω0t2) (8.19)
白色雑音の場合の分散行列は、次のように与えられる。
R0(τ) = ¥ f racN02δ (τ) (8.20)
ここで N0:雑音スペクトル密度行列このとき (8.18)式は、次式となる。
RΨ(t1 , t2) =12
Tr[G(t1 , t2)N0
]δ (t1 , t2) (8.21)
次のような定義をする。
∆ϕτ(t) =∫ t+τ
tΨ(t1)dt1 (8.22)
この式の分散は、次のように求められる。
σ2∆ϕ =
∫ ∫ t+τ
tRΨ(t1 + t2)dt1dt2
=∫ t+τ
t
12
Tr[G(t1 , t2)N0
][u(t1 − t)−u(t1 − t − τ)]dt1 (8.23)
ここで τ ≫ T あるいは τ = nT のとき、(8.23)式は、次のようになる。
σ2∆ϕ =
12
Tr[< GN0 >
]· τ (8.24)
ここで < G >:行列 Gの時間平均出力電圧の自己共分散関数は、次のようになる。
RV (τ) = E [V (t1)V (t2)]
=V 2
02
cos(ω0τ)exp
(−
Tr[GN0
]4
|τ|
)(8.25)
この共分散関数のフ-リエ変換を行うことによって、 単側波帯における電力スペクトルが得られる。
L [∆ω] =8
Tr[< G > N0
] · 1
1+(
4Tr[<G>N0]
)2
(∆ω)2(8.26)
この関数のグラフは、上の式の分母から、次に示す −3 [dB] コーナー周波数を持つLorentzianである。
ω−3 dB =Tr[< G > N0
]4
(8.27)

65
第 9章
設計法
9.1 回路設計の流れ発振器の設計をどの様に行うか、ここではその具体的方法について述べていく。その他の回路を設計する場合においても同様な手法が用いられるが、ここでは発振器の設計法を中心に考えていく。設計法の流れを考えると、図 9.1の様になる。
回路の選択
定数の決定
シミュレーション
判定
IC図面作成
第1章で述べた様々な要因を決定する。
多数存在する発信形式を仕様に基づいて1つ決定する。
現状の素子の実力に基づき、各定数を定める。
SPICEを用いてシミュレーション
仕様を満足するか。
具体的なICの設計に入る。
図 9.1 設計の流れ
この設計の流れの中で一番難しいのが、回路の選択である。この判断を行うには、様々な回路についての長年の研究が必要になる。よって全くの新人には一番難しいステップとなる。更に現時点においても素子の開発が精力的行われ、回路の開発も常に行われているため、ベテランにとってもかなり熟慮を要するステップである。その他のステップは、この回路の選択に比べると比較的易しく、現状一般に用いられている様々な設計手段、例えば SPICEやデジタルであれば Verilog、VHDLなどの計算機ソフトウエアの取り扱いを熟知しておけば解決する内容である。
66 第 9章 設計法
9.2 回路の選択ICを用いた発振回路設計の場合、まず始めに決めなくてはならないことは、どの様な製造プロセスを用いるかと言うことである。例えばCMOSで言えば、何ミクロンのプロセスを用いるかと言うことである。なぜこのようにプロセスをまず決めなければならないかと言うと、プロセスによって使えない素子が存在すること、プロセスによって素子の性能に違いが存在することなどによる。この決定を行うにあたり考慮しなければならないことは、次のような内容であり、これらは仕様という文章の形で通常まとめられている。電源電圧、消費電力、チップサイズ、回路に要求される雑音、速度、温度、湿度などの環境、ICを収納するパッケージなど、これらのことを考慮した後、いよいよ回路の形式を決めなければならない。回路の基本形式は、山の様に存在するわけではない。第 1章で述べたようにかなり少数の基本回路しか存在していない。これらの形式の1つを選択することも重要なことではあるが、むしろこれらの基本形式をどの様に変形して仕様を満足させるかと言うことの方が重要かつ難しい問題である。なぜなら多くの回路に要求される仕様のうち大部分は、これらの変形によって決まってくること、またその変形の仕方は無限に近いほど考えられるからである。第 1章で示したように回路の基本形は、例えば直流のバイアス回路を無視した形で示されていたり、接地点を何処に取るかも示されてはいない。しかし実際に回路を構成するときには、これらの問題を解決しなければならない。この様に、同じ基本回路であっても様々な変形が考えられることになり、この変形をどの様に行うかというところに設計者のノウハウが生かされることになる。ノウハウと言っているように、回路をどのように選び、それをどう変形するかと言ったことに関しては、こうでなければならないと言った方針は見つかっていない。つまり設計者の過去の経験と感に基づいて決定しているのが実情である。これらの経験および感とは、さまざまな回路を設計するうちに、このような場合にはこうするのが良いと言うように経験によって身に付けてきている知識であり、これらの知識は、現時点で体系付けられていない。以上のことから、回路を決定すると言う作業は、回路設計者の経験と感によって選択されている。では回路設計者はどのような観点から回路を決定するのであろうか。人によって個人差が大きいが、回路選択の範囲は、個人の経験によっているので、経験の浅い設計者ほど回路の選択の範囲が狭くなる。しかし一般的に多くの回路設計者は、過去の経験によって得た基本回路をいくつか思い描きながら、回路の仕様と照らし合わせもっともふさわしい回路を選択していくことになる。
9.3 定数の決定回路設計者によって、回路が決まってしまうと、次に回路の中に使われている素子の定数を決めなければならない。ところがいくら素子の定数を変更しようとも、回路仕様を満足することが出来ない場合が発生する。この場合には回路を多少変更するか、基本的なところを変更せず、別の回路素子を追加または削除して仕様を満足する。しかしこれでも仕様を満足させることが不可能であると分かった場合には、基本回路そのものを変更していかねばならない。

9.3 定数の決定 67
与えられた回路で仕様を満足できたとしても、素子定数の選び方がいくつも存在する場合がある。このようなときには、どの値を選択しても良いわけであるが、この場合仕様には記載されていなくても、より望ましい選択をしていく必要がある。具体的にどのように定数を決めるべきか、この問題は難しいテーマである。受動素子の場合には、たとえ ICでも連続した値を取ることは出来ないので、不連続な値から選択しなければならないし、さらに製造工程によってばらつきを生じるので、そのばらつきが存在しても ICとして確実に動くように選ばなければならない。能動素子の場合もMOSの場合ゲート長、ゲート幅およびゲートの数を決めなくてはならず、BJTの場合にもベース、エミッタの数を決めていかねばならない。勿論以上の選択は、回路全体に対して求められている仕様を満足するように選ばれねばならない。こう述べると仕様によって与えられるある制限の元に定数を決めるだけなので、素子の定数の値を決めることは簡単そうに感じられるかもしれないが、仕様に与えられている内容と各素子の定数との間には複雑な関係が存在しているため、簡単に求めることは出来ない。具体的な発振器のブロック図として、次の回路を考えてみる。


69
付録 A
確立過程
ここでは、確率過程について纏めています。確率はある時間の点についての理論ですが、確率過程とは時間変化を含んでいます。
A.1 確立過程の定義まず始めに確立過程において用いられる、様々な言葉の定義について纏めておきます。
確立過程の分類確立過程は、次の四つに分類することが出来ます。
1. 連続的確立過程時間軸も取りうる値も連続的である場合。
2. 離散的確立過程時間軸は連続であるが、とり得る値は離散値である場合。
3. 連続的確立数列時間軸が離散値しかとらないが、とり得る値は連続である場合。
4. 離散的確立数列時間軸の値および取りうる値も離散値である場合。
分布関数と密度関数確率を Pによって表しますと、特定の時間 t1 における確率変数 X1 = X(t1)が持つ分布関数は、FX (x1 : t1)と記され、次の式で定義されます。
FX (x1 : t1) = P [X(x1)≤ x1] (A.1)
二つの確率変数 X1 = X(t1)と X2 = X(t2)に対する 2次の結合分布関数および多数の確率変数の場合の分布関数は、次のように定義されます。
FX (x1 , x2 : t1 , t2) = P [X(x1)≤ x1 , X(x2)≤ x2] (A.2)FX (x1 , · · · , xn : t1 , · · · , tn) = P [X(x1)≤ x1 , · · · , X(xn)≤ xn]
(A.3)

70 付録 A 確立過程
これらの分布関数に対応する密度関数は、次のように与えられます。
fX (x1 : t1) =dFX (x1 : t1)
dx1(A.4)
fX (x1 , x2 : t1 , t2) =∂FX (x1 , x2 : t1 , t2)
∂x1∂x2(A.5)
fX (x1 , · · · , xn : t1 , · · · , tn) =∂FX (x1 , · · · , xn : t1 , · · · , tn)
∂x1 , · · · , ∂x2
(A.6)
自己相関関数
RXX (t1 , t2) = E [X(t1)X(t2)] (A.7)
相互相関関数
RXY (t , t + τ) = E [X(t)Y (t + τ)] (A.8)
直交過程次の式が成立する場合 X(t)と Y (t)とは、直交過程と呼ばれます。
RXY (t , t + τ) = 0 (A.9)
自己共分散関数
CXX (t , t + τ) = E ({X(t)−E [X(t)]}{X(t + τ)−E [X(t + τ)]})= RXX (t , t + τ)−E [X(t)]×E [X(t + τ)] (A.10)
相互共分散関数
CXY (t , t + τ) = E ({X(t)−E [X(t)]}{Y (t + τ)−E [Y (t + τ)]})= RXY (t , t + τ)−E [X(t)]×E [Y (t + τ)] (A.11)
無相関二つの確立過程において、次の式が成立するとき、これら二つの確立過程は無相関であると言います。
CXY (t , t + τ) = 0 (A.12)
このとき、次の関係式も成立します。
RXY (t , t + τ) = E [X(t)]×E [Y (t + τ)] (A.13)

A.1 確立過程の定義 71
時間平均
A(•) = limT→∞
12T
∫ T
−T(•)dt (A.14)
時間的自己相関関数
RXY (τ) = A [x(t)x(t + τ)] = limT→∞
12T
∫ T
−Tx(t)x(t + τ)dt (A.15)
決定論および非決定論決定論とは未来が予測できる場合であり、非決定論とは予測が不可能な場合。
定常性と独立性簡単には、定常性とは、確率過程の統計的性質が時間によって変わらないことを言い、
その他の場合を非定常と呼ぶが、定常性にもいくつかの段階が存在しますので、厳密には次に述べる確率過程での分布関数や密度関数によって定義しなければなりません。
統計的独立性統計的に独立であるとは、二つの過程 X(t) と Y (t) とにおいて、片方の確率変数
の群 X(t1) , X(t2) , · · · , X(tN) が、もう一方の群 Y (t1′ , Y (t2′ , · · · , Y (N′) と時刻t1 , t2 , · · · , tN , t1′ , t2′ , · · · , tN′ をどのように選んでも独立であるときのことを言います。このとき次の式が成立しなければなりません。
fXY (x1 , · · · , xN , y1′ , · · · , yM′ ; t1 , t2 , · · · , tN , t1′ , t2′ , · · · , tN′)
= fX (x1 , · · · , xN ; t1 , t2 , · · · , tN)× fY (y1′ , · · · , yM′ ; t1′ , t2′ , · · · , tN′)
(A.16)
一次の定常過程確率過程は、その一次の密度関数が時刻起点の推移に対して不変であるならば、次数一
の定常と呼ばれます。このとき次に示す式が ∆のどの様な値に対しても成立します。
fX (x1 ; t1) = fX (x1 ; t1 +∆) (A.17)
この式は、次のように変形することが出来ます。つまり期待値は、一定の値となることです。
E [X(t)] = X (A.18)
二次の定常二次の密度関数が、あらゆる t1 , t2 および ∆に対して、次の式が常に成り立つ場合、こ
の確率過程は二次の定常と呼びます。
fX (x1 , x2 ; t1 , t2) = fX (x1 , x2 ; t1 +∆ , t2 +∆) (A.19)
72 付録 A 確立過程
この式は、二次の密度関数が時間差のみの関数であり、時間そのものには関係しないことを示しています。二次の定常過程の自己相関関数は、時刻差だけの関数であって、時刻そのものの関数にはなりません。式で表現しますと、τ = t2 − t1 と置けば、このことは次の式が成立することを意味しています。
RXX (t1 , t2) = RXX (τ) (A.20)
広義の定常二次の定常は必要以上に制約的であり、よりゆるい形の定常が必要になる場合があります。そのとき用いられるのがここに述べる広義の定常であり、次の二つの式が成立する場合の過程を言います。
E [X(t)] = X :一定 (A.21)E [X(t)X(t + τ)] = RXX (τ) (A.22)
N次および厳密な定常性N個の確率変数に拡張し、もしもある確率過程のN次の密度関数が、時刻起点の推移に対して不変です。つまり次の式があらゆる t1 , · · · , tN および ∆について成立するとき、この確率過程はN次の定常と呼ばれます。
fX (x1 , · · ·xN ; t1 , · · · , tN) = fX (x1 , · · ·xN ; t1 +∆ , · · · , tN +∆) (A.23)
あらゆる次数 N = 1 , 2 , · · · に対して定常な過程は、厳密な定常と呼ばれています。
エルゴート性統計平均と時間平均とが等しくなる過程のことをエルゴート過程と呼びます。また二つの確率過程が個々の過程においてエルゴートであり、またそれらの時間的相互相関関数が統計的相互相関関数に等しい、つまり
Rxy(τ) = limτ→∞
12T
∫ T
−Tx(t)y(t + τ)dt = RXY (τ) (A.24)
であるならば、結合エルゴートと呼ばれます。
複素確立過程1. 次の二つの実確立過程によって定義される確立過程のことを、複素確立過程と呼びます。
Z(t) = X(t)+ jY (t) (A.25)
2. 複素過程の平均値は
E [Z(t)] = E [X(t)]+ jE [Y (t)] (A.26)
3. 自己相関関数
RZZ(t , t + τ) = E [Z∗(t)Z(t + τ)] (A.27)

A.1 確立過程の定義 73
4. 自己共分散関数
CZZ(t , t + τ) = E({Z(t)−E [Z(t)]}∗ {Z(t + τ)−E [Z(t + τ)]}
)(A.28)
5. 相互相関関数
RZiZ j(t , t + τ) = E [Z∗i (t)Z j(t + τ)] i = j (A.29)
6. 相互共分散関数
CZiZ j(t , t + τ) = E({Zi(t)−E [Zi(t)]}∗
{Z j(t + τ)−E [Z j(t + τ)]
})i = j (A.30)
7. 無相関次の式が成立する場合、無相関と呼ばれます。
CZi , Z j = 0 i = j (A.31)
8. 直交過程次の式が成立する場合、直交過程と呼ばれます。
RZi , Z j(t , t + τ) = 0 i = j (A.32)
パワー密度スペクトル確立過程においては、一般に確定信号における電圧や電流のような信号のスペクトルと言うのは定義できません。そこでその代わりとしてパワー密度スペクトルを定義して、通常このパラメータが用いられます。
平均パワー 確立過程においては、次のような平均パワーが定義されます。
PXX = limT→∞
12T
∫ T
−TE[X2(t)
]dt
=1
2T
∫ ∞
−∞lim
T→∞
E{|XT (ω)|2
}2T
dω (A.33)
パワー密度スペクトル
SXX (ω) = limT→∞
E{|XT (ω)|2
}2T
(A.34)
以上の二つから
PXX =1
2π
∫ ∞
−∞SXX (ω)dω (A.35)
ここで
XT (ω) =∫ ∞
−∞XT (t)exp(− jωt)dt
=∫ T
−TXT (t)exp(− jωt)dt (A.36)
パワー密度スペクトルの帯域幅
W 2rms =
∫ ∞−∞ ω2SXX (ω)dω∫ ∞−∞ SXX (ω)dω
(A.37)

74 付録 A 確立過程
相互パワー密度スペクトル平均相互パワー
PXY = limT→∞
12T
∫ T
−TRXY (t , t)dt
=1
2π
∫ ∞
−∞lim
T→∞
E[X2
T (ω)YT (ω)]
2T(A.38)
相互パワー密度スペクトル
SXY (ω) = limT→∞
E [X∗T (ω)YT (ω)]
2T(A.39)
X と Y とを入れ替えた相互パワー密度スペクトルを定義することも出来ます。
A.2 確率過程の定理自己相関関数の性質
1. |RXX (τ)| ≤ RXX (0)
2. RXX (−τ) = RXX (τ)3. RXX (0) = E
[X2(t)
]4. lim|τ|→∞ RXX (τ) = X2
5. X(t)に周期成分があれば、RXX (τ)も同じ周期の成分が含まれます。6. X(t)がエルゴート、平均値ゼロ活周期成分を持たない場合
lim|τ|→∞
RXX (τ) = 0
7. RXX (τ)は、任意の形を持ちません。
相互相関関数の性質広義の定常である場合
1. RXY (−τ) = RXY (τ)2. |RXY (τ)| ≤
√RXX (0)RYY (0)
3. |RXY (τ)| ≤ RXX (0)+RYY (0)2
共分散関数広義の定常である場合
1. CXX (t , t + τ) =CXX (τ) = RXX (τ)− X2
2. CXY (t , t + τ) =CXY (τ) = RXY (τ)− XY
分散3. σ2
X = E({X(t)−E [X(t)]}2
)= RXX (0)− X2

A.2 確率過程の定理 75
複素確立過程1. X()と Y (t)とが結合定常であるなら Z(t)は定常です。2. X()と Y (t)とが広義の結合定常であるなら Z(t)は広義の定常です。3. 2つの複素過程 Zi(t) と Z j(t) の各々が広義の定常で、相互相関関数が時刻差だけの関数であれば、この二つの関数は、広義の結合定常です。
パワー密度スペクトル1. SXX (ω)≥ 0
2. SXX (−ω) = SXX (ω) X(t)は実数3. SXX (ω)は実数4. 1
2π∫ ∞−∞ SXX (ω)dω) = A
{E[X2(t)
]}5. SX X (ω) = ω2SXX (ω)
6. 12π∫ ∞−∞ SXX (ω)exp( jωτ)dω = A [RXX (t , t + τ)]
SXX (ω) =∫ ∞−∞ A [RXX (t , t + τ)]exp(− jωτ)dτ
広義の定常過程の場合(ウイナー・ヒンチンの関係)7. SXX (ω) =
∫ ∞−∞ RXX (τ)exp(− jωτ)dτ
8. RXX (ω) = 12π∫ ∞−∞ SXX (τ)exp( jωτ)dτ
相互パワー密度スペクトル1. SXY (ω) = SY X (−ω) = S∗Y X (ω)
2. ℜ [SXY (ω)]と ℜ [SY X (ω)]は偶関数3. ℑ [SXY (ω)]と ℑ [SY X (ω)]は奇関数4. X(t)と Y (t)が直交している場合、SXY (ω) = 0または SY X (ω) = 0
5. X(t) と Y (t) が無相関で、各々一定の平均値を持つ場合 SXY (ω) = SY X (ω) =
2πXY δ (ω)
6. A [RXY (t , t + τ)]⇔ SXY (ω) , A [RY X (t , t + τ)]⇔ SY X (ω)
広義の定常過程の場合
SXY (ω) =∫ ∞
−∞RXY (τ)exp(− jωτ)dτ
RXY (ω) =∫ ∞
−∞SXY (τ)exp( jωτ)dτ
SY X (ω) =∫ ∞
−∞RY X (τ)exp(− jωτ)dτ
RY X (ω) =∫ ∞
−∞SY X (τ)exp( jωτ)dτ

76 付録 A 確立過程
複素過程のパワースペクトル複素過程 Zm(t)と Zn(t)とが広義の結合定常である場合
SZmZn(ω) =∫ ∞
−∞RZmZn(τ)exp(− jωτ)dτ
RZmZn(ω) =1
2π
∫ ∞
−∞SZmZn(τ)exp( jωτ)dτ

A.2 確率過程の定理 77


79
参考文献
[1] I. L. Gerstein. On fluctuations in the neighborhood of periodic motion of an auto-
oscillating system. Doklad. Nauk., 20:11, Jan. 1938.
[2] K. Kurokawa. Some basic characteristics of broadband negative resistance oscillators.
The Bell System technical journal, 48:1957–1955, July-August 1969.
[3] 川上正光. 電子回路 III. 岩波書店., 19**.

80
索引
RC発振器, 3ISF, 21, 43圧力, 1アドミタンス, 8anode回路, 3アバランシェ雑音, 23安定, 9, 15安定性, 11安定性, 1安定判別法, 9
位相, 43, 55位相インパルス, 62位相検知器, 25位相誤差, 27位相差, 25位相雑音, 23, 48, 49, 56位相ジッタ, 29, 46位相揺らぎ, 42位相余裕, 18因数, 15インダクタンス, 45, 49インバータ, 58インパルス, 43, 62インパルス・エネルギー, 43インパルス・レスポンス, 43
AM雑音, 38, 40エネルギー, 10エネルギー等分配の法則, 43FM雑音, 38, 401/ f 雑音, 51f 雑音, 461/f雑音, 22, 42, 63LC共振器, 50演算子, 46
開ループ, 15各種発振器, 2下降時間, 52重ね合わせの原理, 62干渉, 1
帰還回路, 5奇関数, 14, 17帰還ループ, 29軌跡, 17基本波, 11共振回路, 49狭帯域雑音, 37共分散, 24行列式, 61極, 15, 19
偶関数, 14Clapp回路, 2Clap回路, 6クローバー電流, 55Groszkowskiの方法, 9
ゲート酸化膜容量, 54
高周波成分, 10高周波増幅器, 42高精度, 4高調波, 11高調波成分, 10コーナー周波数, 47, 54Colpitts回路, 6Colpitts発振器, 2, 48コレクタ・ショット雑音, 58根軌跡, 20根軌跡法, 13, 18コンダクタンス, 8
サーキュレータ, 36サイクロ・ステーショナリ, 63サイクロステーショナリ雑音, 47, 49再現性, 4雑音, 1, 9, 21雑音解析, 61雑音空間, 61雑音信号, 45雑音スペクトラム, 40雑音スペクトル密度行列, 64雑音電流, 22雑音電力スペクトラム, 28雑音同期信号, 40雑音波形, 47雑音パワー密度関数, 40雑音ベクトル, 63雑音レベル, 40サブストレート, 58三角関数, 10
時間移動量, 63磁気フラックス, 46シグナルフローグラフ, 20次元, 41自己共分散, 63自己共分散関数, 64自己相関関数, 39指数関数, 34自然周波数, 51実数, 5ジッタ, 1ジッター, 24, 55ジッター位相, 54ジッタ雑音, 56湿度, 1シミュレーション, 4自由振動, 4周波数スペクトラム, 23周波数スペクトル, 47自由発振, 34, 37, 39自由発振器, 42自由発振雑音, 40出力スペクトラム, 38, 50出力変動, 1

81
上昇時間, 52状態ベクトル関数, 61状態変数, 61消費電力, 1ショート・チャネル, 54, 56真空管, 11振幅, 43振幅雑音, 49, 50
スイッチ, 27スイッチング, 58スペクトラム, 40, 42スペクトラムアナライザ, 37スペクトラム密度, 54スペクトラム密度関数, 38, 39, 41スペクトル密度, 37スレッショルド電圧, 56
制御理論, 9正弦関数, 33正弦波成分, 50正弦波発振器, 2静止状態, 9絶対温度, 21節点, 55ゼロ点, 15, 19漸近線, 20線形, 21
相関, 59SAW, 3側波帯, 45
多次元, 61多次元雑音, 63単位周波数, 45単位帯域幅, 37単側波帯, 64
遅延, 52チャージポンプ, 27, 31チャネル雑音, 47チャネル長, 54チャネル幅, 54
低周波, 1定常状態, 9, 27, 35定常的, 1定電流源, 12tail電流, 57Tayler展開, 62デュアル, 45電圧依存性容量, 49電圧制御発振器, 25電荷, 49伝達関数, 18, 20, 29電力, 35電力スペクトラム, 24電力スペクトル, 64電力波, 36電力密度関数, 38
同期, 40, 41同期信号, 36同期発振, 39統計解析, 21同調回路, 10–12動的状態, 9ドレイン電流, 56トレランス, 1
ナイキスト, 15, 18ナイキスト経路, 16
2次間数, 27二乗平均, 36二乗平均値, 52
ノートンの定理, 22
バースト雑音, 23白色雑音, 21, 28, 42, 46, 50, 51白色ステーショナリ雑音, 48発散, 16発振器, 9発振器の歴史, 4発振周波数, 11, 35, 44発振振幅, 49発振電流, 42発振波形, 10パルス, 36パワースペクトラム密度, 50パワー・スペクトル, 47半導体, 11
PN接合, 22PLL, 25, 26, 31ピーク値, 45微細化, 4非正弦波発振器, 2非線形, 9, 21標準偏差, 24ピンク雑音, 22
不安定, 9, 13, 15, 17フーリエ変換, 37VCO, 25, 31フィルタ, 25, 26フーリエ級数, 44フーリエ展開, 47, 64負荷インピーダンス, 10複素関数論, 17複素平面, 15, 20負性抵抗, 5, 8負性抵抗値, 38ふらつき, 39, 42フラックス, 45Blackmann, 5フリッカー雑音, 22分散, 64
閉曲線, 16閉ループ, 15ペップ数, 1
方形パルス, 36放熱, 1ポップコーン雑音, 23Boltsman定数, 21
マイクロ波, 1マイクロは領域, 35meissner回路, 3
密度関数, 40民生機器, 1
揺らぎ, 24
容量, 48

82 索引
ラウスフルビッツ, 13, 14ラティス回路, 3ランダム, 44lampkin回路, 3
リップル, 1利得, 5利得余裕, 18リミッタ, 38リミットサイクル, 61リャプーノフ, 13リャプーノフ関数, 14Ring Oscillator, 3, 48, 52
ループ利得, 5, 26
Llewellyneの方法, 11
ロング・チャネル, 54
ナイキスト, 13