cellular automata modeling approaches to …kclarke/public/revised-paper-3_kc.doc · web...
TRANSCRIPT

Cellular Automata Modeling Approaches to Forecasting of Urban Growth
for Adana, Turkey: A Comparative Approach
Suha BERBEROGLU*a, Anıl AKIN*b, Keith C. CLARKE§
*a Cukurova University, Department of Landscape Architecture, Adana, Turkey
*b Bursa Technical University, Regional and Urban Planning Department, Bursa, Turkey§University of California, Geography Department of Geography, Santa Barbara, USA
*a [email protected]; § [email protected].
*bCorresponding author: Phone: (+90) 224 314 17 29 e-mail: [email protected]
The application of cellular automata (CA) in urban modeling can give insights
into a wide variety of urban phenomena, but what among the many methods produce the
best forecasts? We describe the different most commonly used urban modeling
approaches relating to cellular modeling, including Markov Chains, SLEUTH, Logistic
regression (LR), Regression tree (RT) and Artificial Neural Networks (ANN) within
Cellular Automata models (CA) to assess their effectiveness for in forecasting the urban
growth of Adana, Turkey for the year 2023. The application of cellular automata (CA) in
urban modeling can give insights into a wide variety of urban phenomena. Calibration
data were from remotely sensed data recorded in 1967, 1977, 1987, 1998 and 2007. Three
models: SLEUTH, a Markov Chain model and a RT models resulted in the overall Kappa
accuracy measures of 75 %, 72% and 71 % respectively, measured over the past data
using hindcasting. LR and ANN yielded the least accurate results with an overall Kappa
accuracy of 66 %. Different modeling approaches have their own merits and advantages.
However, the SLEUTH model was the most accurate for handling the variability in the
present in urban/non-urban development in Adana.
Keywords: Urban modeling, SLEUTH, Logistic Regression, Regression Tree, Artificial
Neural Network, Markov Chain.
1
Software Availability
Name of softwares: (1) SLEUTH3.0beta_p01; (2) Dinamica EGO 1.4.0, Idrisi Selva
Developers: (1) Dr. Keith C. Clarke and others; (2) Dinamica Project Team
Contact address: (1) University of California, Santa Barbara, Department of Geography;
(2) CSR - Remote Sensing lab at UFMG (Universidade Federal de Minas
Gerais).
e_mail: (1) [email protected]; (2) [email protected].
Availability and Online Documentation: (1) All the source code and software is
available on the website: http://www.ncgia.ucsb.edu/projects/gig ; (2) The
software and tutorial is available on the website :
http://www.csr.ufmg.br/dinamica
Year first available: (1) 1996; (2) 1998
Hardware required: Well equipped hardware in terms of CPU and RAM.
Software required: (1) Cygwin (Linux interface for Windows), or Linux; (2) Windows,
(3) ArcMap, (4) See5, (5) Erdas imagine, (6) Idrisi, (7) MATLAB.
Programing Language: (1) C programing language.
Program Size: (1) 3.30 mb; (2) 62.7 mb.
2

1. Introduction
Land use/land cover degradation is the a major environmental problem resulted
resulting in habitat losses, poor resource management practices, invasive species, and air
pollution. Urban sprawl is a major cause of this loss and degradation (Claggett et al.,
2004). Accurate information on the change changing trends of within the urban
environment is needed to develop strategies for sustainable development and to improve
the liveability of cities. The ability to exhibit historic and potantial future urban change is
highly desirable for local communities and decision makers alike (Xian and Crane, 2005).
Urban modeling became widespread in the 1960s (Wilson, 1974; Batty, 1981),
and recent technological innovations (such as remote sensing and GIS) have helped the
development of more sophisticated approaches that can simulate future development
scenarios. Over the last 20 years, there have been an increasing number of studies that
have simulated urban growth using cellular automata (CA) techniques (White and
Engelen, 1997, Batty and Xie 1994, Wu, 1998, Clarke et al. 1997). CA was were first
proposed by Ulam and Von Neumann in the 1940s to investigate the logical nature of
self-reproducible systems in the 1940s (White and Engelen 1997). CA models are
expressed rather simply, and their power comes from the ease with which simple
preconditions, distributions, rules, and actions can lead to extraordinary complexity.
These rules can be defined according to an intuitive understanding of the processes
behind geographical phenomena (Li and Liu, 2006). Various types of transition rules
have been proposed according to experts’ preferences and knowledge (Batty and Xie
1994; Clarke et al. 1997; Wu and Webster 1998). For example, transition rules can be
represented by using weighting matrices (White and Engelen 1993), Markov Chains
(Tang et al. 2007, Weng et al. 2001), adjacency and local environmental constraints
(Clarke and Gaydos 1998; Silva and Clarke, 2005), Multicriterion Evaluation (MCE)
(Wu and Webster 1998), logistic regression (Wu 2002), and neural networks (Li and Yeh
2002; Almeida and Gleriani 2005; Shmueli 1998).
3

The city of Adana in Turkey represents a case of dense population and rapid
changes in urban land. Since the reform of farming in Adana in the 1950s, great changes
have taken place. Immigration from neighboring cities has been the main concern of city
planners. In order to assess the potential effectiveness of growth trends in Adana, it was
thought desirable to develop a predictive modeling system. The topic of this research was
to determine which among the variants of CA produces the most accurate simulations and
forecasts. Given success with regional scale modeling, and the ability to incorporate
different levels of protection for different areas, models such as: i) Markov Chain; ii)
SLEUTH (slope, land use, excluded layer, urban extent, transportation, hillshade); iii)
Logistic regression (LR); iv) Regression tree (RT); and v) Artificial Neural Network
(ANN) models were adopted to simulate the urban growth of Adana for the year 2023
based on common data. The models can use a large range of information like remotely
sensed images, biophysical and socio-economic variables, land use scenarios, census
data, etc. and can eventually also be used in combination (Mas et al., 2014). For the our
study, models were randomly chosen from among the most popular dynamic spatially
explicit models. In this frame, the goal of this research was to simulate urban/non-urban
growth process accurately and identify the strengths and weaknesses of these different
modelling approaches in the context of the local geographic scale. The application of the
different modeling approaches enables enabled a comparison among the models.
Implementation of each of the models had two general phases: (1) calibration,
where historic growth patterns were simulated; and (2) prediction, where patterns of
growth were projected into the future. The outcomes of the urban growth modeling
collectively will be the baseline data for further socio-economic planning and
management.
2. Cellular automata for urban growth simulation
A cellular automaton (CA) is a theoretical framework that permits computational
experiments in spatial arrangements over time. Components of a CA model are: (1)
reference set of cells, usually a raster grid of pixels covering an urban area; (2) a set of
states associated with the cells, which can be in the set {urban, not urban} or more
detailed land uses such as {urban, forest, agricultural, wildland, wetlands, water}, and
4
such that all cells have a state at any given time; (3) a set of rules that govern state
changes over time; (4) an update mechanism, in which rules are applied to the state at one
time period to yield the states of the same cells in the next time period; and (5) a n initial
condition of the framework (Clarke, 2008). (The same from Clarke, 2008) Cells are the
smallest units which and must manifest some adjacency or proximity. The state of a cell
can change according to transition rules which are defined in terms of neighborhood
functions, and can also model 1,2,3 and n-dimensional spaces. The notion of
neighborhood is central to the CA paradigm (Couclelis, 1997), but the definition of
neighborhood is rather relaxed. Although many CA use 1 or 3+ dimensions, urban
models CA are exclusively cell-based methods that can model two-dimensional space.
Formally, standard cellular automata can be generalized as follows (Li and Yeh
2000):
S[t+1] = f (S[t], N ) (1)
where S is a set of actual states of all the cells of the automaton in time step t, N is a
neighborhood of all cells providing input values for the function f(), and f is a transition
function that defines the change of the state from between time t to and t+1.
CA has have a broad range of applications and CA models haves become a
powerful tools for simulating many geographical phenomena. Wu and Martin (2002),
used population surface modelling and CA to conduct an empirical urban growth
simulation for Southeast England. They concluded that CA simulation is useful in
exploring future urban growth by understanding the impact of different development
conditions. Li et al (2012), proposed a pattern-calibrated CA based on a genetic algorithm
to improve the goodness-of-fit between simulated and observed development patterns.
Chen et al., (2013), developed a patch-logistic-CA by incorporating a patch-based
simulation strategy into the conventional cell-based Logistic-CA to eliminate the
limitations for simulating realistic urban growth. Akın et al., (2014), emphasized the
impact of historical exclusion on the calibration of the SLEUTH model in the frame of
CA approach.
CA models are useful for simulating urban systems because they are inherently
spatial, directly compatible with raster GIS and temporally dynamic, with state transitions
5

intuitively simulating the temporal/spatial dynamics of urban change (Syphard et al,
2005; Couclelis, 2002).
3. Study area and the data
3.1. Study Area
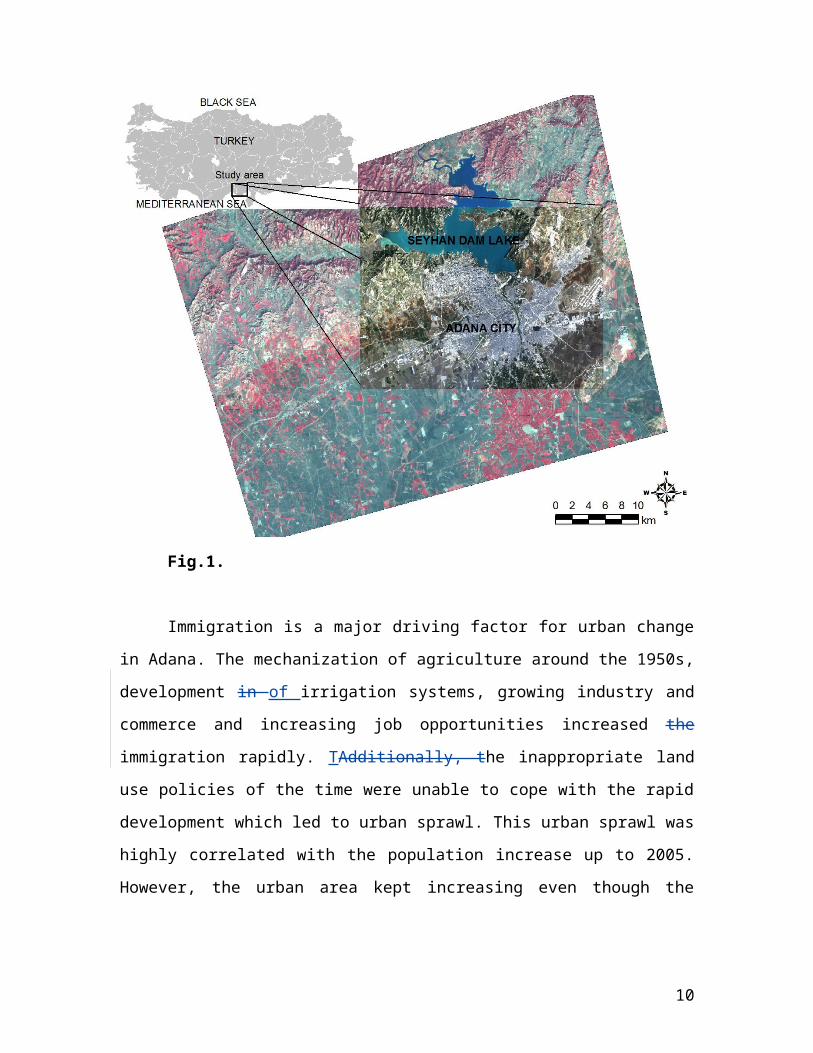
Geographically, Adana is located at the Southeastern Mediterranean coast of
Turkey. The region covers latitudes and longitudes are 36°00'- 37°30'N and and
longitudes 34°30'- 36°00'E respectively. The city is situated on the River Seyhan,
30 kilometers inland from the Mediterranean Sea. Adana Province has a population of
1.56 million, making it the fifth most populous city in Turkey (Fig. 1). Adana is nestled
in the most fertile area of the country, on land irrigated by the Seyhan. The southern part
of the province is entirely flat with various crops such as citrus, vegetables, maize, cotton
and wheat.
Fig.1.
6

Immigration is a major driving factor for urban change in Adana. The
mechanization of agriculture around the 1950s, development in of irrigation systems,
growing industry and commerce and increasing job opportunities increased the
immigration rapidly. TAdditionally, the inappropriate land use policies of the time were
unable to cope with the rapid development which led to urban sprawl. This urban sprawl
was highly correlated with the population increase up to 2005. However, the urban area
kept increasing even though the population increase gradually slowed down after 2005
(Fig. 2).
0
20
40
60
80
100
120
140
160
180
1965 1975 1985 1995 2007Time Periods
Area
0
200,000
400,000
600,000
800,000
1,000,000
1,200,000
1,400,000
1,600,000
Popu
latio
n
Area (km2) Population
Fig. 2.
3.2. Data Set and Spatial Variables
The data for this study comprised five different remotely sensed images recorded
on: 18 August 1967, 24 August 1977 (Corona satellite photos with 2-4m spatial
resolution), 25 November 1987 and 27 July 1998 (SPOT 1 with a 20 m spatial resolution
and panchromatic band of SPOT 4 with a 10 m spatial resolution) and 22 February 2007
(10 m spatial resolution ALOS AVNIR). In addition, we used 1:25,000 scale topographic
maps for deriving the Digital Elevation Model (DEM) calculation. Different resolutions
of data was were selected for the study area due to lack of high resolution historical
remotely sensed data (Table 1).
7
The input data variables and resolution were kept constant all throughout each of
the modeling approaches to ensure comparability among the five techniques.
Input data with high spatial resolution were was classified and spatial variables
were also prepared in their original resolutions and then resampled to a common scale
cell size of 10 m by using Nearest Neighbor (for classification) and Cubic Convolution
(spatial variables) methods. The models were calibrated and predicted in at the same
common spatial resolution of 10 m.
Table 1. Remotely sensed dataset.
Date of acquisition Data Source Spatial resolution18 August 1967,24 August 1977 Corona satellite photo 2-4m
25 November 1987,27 July 1998
SPOT 1 and SPOT 4 images (with 10 m panchromatic band)
20m
22 February 2007 ALOS AVNIR-2 10m
Establishment of the multivariate spatial model relies relied on integrating various
spatial variables to derive the overall probability of urban development for each pixel.
DEM, slope, excluded layer, urban extent, transportation, hillshade, distance to urban,
road and water maps were defined as spatial variables that influence the future urban
development of Adana City. Hillshade was included, even though it is only input to
SLEUTH model to increase the visual interpretation of the output. SLEUTH has
necessary pre-defined inputs that make the model run i.e. it requires a transportation layer
for distance calculation whereas, other methods useuses road distance. The other four
approaches have flexibility of in integrating various inputs. However our research utilized
the similar inputs as SLEUTHs to ensure comparison of among the techniques. Also
Tthese inputs are the main physical driving factors of urban growth which makes it
applicable for different cities all over the world like Sidney (Liu and Phinn, 2004),
Alexandria (Azaz, 2004), Iran (Rafiee et al., 2009), Cape Town (Watkiss, 2007), Houston
8

(Oğuz et al., 2007), Adana (Akın, 2011), and Hyderabad (Gandhi and Suresh, 2012).
Table 2 shows each spatial variable associated with a the different modeling approaches
in detail.
Model inputs are were derived from the same point in time. For all models, the
initial or “seed” year is was 1967 and the spatial variables (road distance, urban distance
etc.) were calculated twice considering the relevant prediction year. A 2007 prediction
was performed for accuracy assessment. Images recorded in 1977 and 1987 were only
used for the SLEUTH model as it requires at least four urban extent and two
transportation layers for different time periods. These explain the time differences in the
table 2.
Table 2. Model inputs for different model approaches.
Model USED Model Inputs SourceData Year
2007 (For accuracy) 2023
[SLEUTH]
SlopeLand useExcluded layerUrban extent Transportation Hillshade
Computed from DEM(Optional, not used here)Masked from classified mapMasked from classified mapDigitized from remotely sensed dataComputed from DEM
2007
19981967-19981967-1998
2007
2007
20071967-20071967-1998
2007
[Markov ChainLR,RT,ANN]
Slope Excluded layerUrban Distance Road DistanceWater DistanceDEM
Computed from DEMMasked from classified mapCalculated from urban extentCalculated from transportationCalculated from classified mapComputed from 1:25.,000 digitized topographic map
200719981998199819982007
200720072007200720072007
4. Method
This study can be summarized into four phases as: (i) geometric correction of the
multitemporal remotely sensed images, (ii) creation of urban maps derived from an object
based classification approach to determine the urban change detection with a ten year
9
interval, (iii) preparation of the spatial variables for modeling, (iv) model calibration,
validation and predicting urban development for the year 2023 with different modeling
approaches, (v) comparison of future modeling prediction results and selection of the
most appropriate model for the study area (Fig. 3).
Fig 3.
Urban The urban map, DEM etc. were determined as basic variables. Urban
distance, road distance, and water distance was were calculated by using basic variables
like urban extent and transportation layers.
10

A Markov Chain is a series of random values whose probabilities at a time
interval depend on the value of the number at the previous time (Fan 2008). The key
factor for a Markov chain is the transition probability matrix which defines change trends
from the past to today and into the future for a certain class type for each pixel. The
probability matrix is a set of conditional probabilities for the cells in the model to go
change to a particular new state. Markov modeling needs defined land use suitability
maps for each class. MCE was used to build these suitability maps. Distance from each
pixel to the urban, road and water classes, plus the DEM, slope and land use maps (as an
excluded layer) were defined as factors. These variables are common for each modelling
approaches. Water resources (the reservoir and distribution channels), green belts and
existing urban settlements were defined as limits. The weighting was determined
according to the historical land use change data based on the expansion pattern and the
observed land use transformations.
The SLEUTH model is implemented as a computer program written in the C
language, available as Open Source via the SLEUTH web site. The program operates as a
set of nested loops: the outer control loop repeatedly executes each growth “history”,
retaining cumulative statistical data, while the inner loop executes the growth rules for a
single “year.” The rules apply to onea cell at a time and the whole grid is updated as the
“annual” iterations complete. The modified array forms the basis for urban expansion in
each succeeding year. Potential cells for urbanization are selected at random and the
growth rules evaluate the properties of the cell and its neighbors (e.g., whether or not they
are already urban, what their topographic slope is, how close they are to a road). The
decision to urbanize is based on mechanistic growth rules as well as a set of weighted
probabilities that encourage or inhibit growth (Clarke and Gaydos 1998). Five factors
control the behavior of the system and four types of growth are defined in the model
(Table 3).
Table 3. Sequential growth types and controlling coefficients in the UGM (Jantz et al. 2003).
Growth cycle order Growth Type Controlling coefficient Description
1 Spontaneous Dispersion, slope resistanceRandomly selects cells for new growth
11

2 Diffusive Breed, slope resistanceExpansion from cells urbanized in spontaneous growth
3 Organic Spread, slope resistanceExpansion from existing settlements
4Road-influenced
Road gravity, dispersion, breed and slope resistance
Growth along transportation network
Logistic regression describes the relation between a categorical or qualitative
outcome variable and one or more predictor variables (Peng and So, 2002).
LR is a special case of multiple regression in which the dependent variable is discrete,
such as land cover types. If the dependent variable is dichotomous, y takes 1 and 0
values.
Logistic regression can be used only with two types of target variables:
1. A categorical target variable that has exactly two categories (i.e., a binary or
dichotomous variable).
2. A continuous target variable that has values in the range 0.0 to 1.0 representing
probability values or proportions.
In the case of n independent variables, the logistic regression equation can be expressed
as follows:
Logit (p) = ln(p/(1-p)) = a+b1*x1+ b2*x2+ bn*xn (2)
where p is the dependent variable expressing the probability that Y=1, x1, x2, and xn are the
independent variables; a is the intercept and b1, b2 and b3 are the coefficients of the
independent variables x1, x2, and xn respectively. The relationship between the dependent
variable and independent variables follows a logistic curve. The logit transformation of
the equation effectively linearizes the model so that the dependent variable of the
regression is continuous in the range of 0-1 (Eastman 2005).
Regression tree is a technique for modeling the probability of an event in terms
of predictor variables and uses repeated resampling of the data to develop empirical
sampling distributions of the relevant statistics in place of the distributional assumptions
(Joel et al. 1994). The regression tree algorithm conducts a binary recursive partitioning
and produces a set of rules and regression models to predict a target variable (historical
landuse change data) based on training data. Each rule set defines the conditions under
which a multivariate linear regression model is established for prediction (Yang et al.
12

2003; Breiman et al. 1984). “The goal in RT is to use a set of predictor variables to
estimate the means of one or more response variables. A binary tree is constructed by
repeatedly splitting the data set into subsets. Each individual split is based on a single
predictor variable and is chosen to minimize the variability in the response variables in
each of the resulting subsets. The tree begins with the full data set and ends with a series
of terminal nodes. Within each terminal node the means of the response variables are
taken as the predictions for observations” (Michaelsen et al., 1994).
ANNs were first discussed by Rosenblatt (1958), who introduced the concept of
the perceptron. His single perceptron was able to classify only linearly separable data,
which was an important limitation to its use. Nonlinear data separation was achieved in
the 1980s as a result of increased computing power and the development of new
algorithms and network topologies. This enabled the use of ANNs for the classification of
remotely sensed imagery (Key et al. 1989; Benediktsson et al. 1990). The multi-layer
perceptron described by Rumelhart et al. (1986) is the most commonly encountered ANN
model in remote sensing. This type of ANN model consists of an input layer, one or more
hidden layers and an output layer. Each layer consists of processing elements called units
or nodes. It holds input values and distributes the information to all units in the next
layer. The input values can be spectral bands or additional information such as image
texture measures. The output layer comprises the land cover classes or in the study case,
transition probability matrix for a specific land use transformation. Layers between input
and output layers are termed as hidden layers. The number of hidden layers within the
network are is defined by the user.
4.1. Object based classification and urban growth change
The object-based classification approach involves the integration of vector and
raster data within a GIS environment and this approach enabled enables the extraction of
image object primitives at different spatial resolutions, termed multi-resolution
segmentation. (Bian and Walsh 1992).
The next stage involved involves a supervised object based classification with the
nearest neighbor algorithm. In our classification, eEach image object was assigned to
13

settlement, agriculture, citrus, forest, bare ground, green belt, water and road classes (Fig.
4).
Fig.4.
The land use/cover classification map of the study area was corrected manually
using the field survey records and detailed biotope maps (Akın, 2007; Altan, 2004)
coincided coinciding with image acquisition in 1998 and 2007. Additionally, expert
knowledge from members of staff in local authorities including the Regional Directorate
of Forestry and the State Hydraulic Works (DSI) was also utilized for the 1977 and 1987
image classification. As these images were corrected manually, using above the data sets
mentioned data setabove, so the entire image was used as ground truth data to create the
14

land cover map for each date. A post-classification change detection technique was
selected within this study due to the variation in data sources and acquisition dates. The
post-classification method can provided “from-to” information for each land class on a
pixel-by-pixel basis. “From-to” information was used to determine the urban
transformations (i.e. agriculture to urban, bare to urban) in the modeling studies. The
cClassified images were used during the post-classification process in order to acquire
precise urban change detection results.
4.2. The model calibration process
Calibration of the models relies on replicating the growth trends from of the past,
as these are already known. CThe calibration is possible using the spatial and statistical
properties of the past to ‘predict’ the known present. Once the most descriptive weighting
values are set to understand urban change over time, these values are used to forecast
future growth. The calibration processes of the Markov Chain, LR, RT and ANN,
resulted in a transition probability maps (TPM) values that best simulate “historical
growth” for the region.
4.2.1. Markov Chain Model
For the Markov Chain TPM calculation, first a cross tabulation is undertaken
between the land cover maps for two dates. “From this, the basic transition probability
matrix (x) is calculated using the table entries and the marginal totals. If the projected
time period is in between even multiples of the training period, then the power rule is
used to generate 3 transition matrices that envelop the projection time period. If the 3
time periods are times A (1967), B (2007) and C (2023), the period to be interpolated will
be between A and B. The three values at each cell in the transition probability matrix are
then fed into a quadratic regression (thus there will be a separate regression for each cell).
Given that a quadratic regression (Y=a+b1X+b2X2) has 3 unknowns and we have three
data points, it yields a perfect fit. This equation is then used to interpolate the unknown
transition probability” (Takada et al., 2010).
Same The same weighting values which that were determined for the 2007
prediction was were also used for 2023. To predict the spatial pattern of change, the
15

variables were first standardized between the values of 0- and 255 and then weighted by
using a Fuzzy fuzzy approach based on their influence on the urban growth. This
approach evaluates the fuzzy set membership function of each pixel. Various fuzzy
membership curves, including Sigmoidal (urban distance) and Linear (road distance.), J-
shaped (water distance) were chosen for scaling the spatial variables. These functions are
controlled by four points ordered from low to high on the measurement scale. Finally
they were overlain to derive the weighted sum at a given location which can be expressed
as:
(3)
Where X denotes the weighting factor applied to a given variable, S is the slope; UD is
the urban distance, RD is the road distance, WD is the water distance. Five layers
(including excluded) was were used for MCE. Like As in the SLEUTH model, the slope
layer was considered to be both a factor and a constraint, and slopes above 21% were
restrained from development. Slopes between 0 and 21% were fuzzified using a
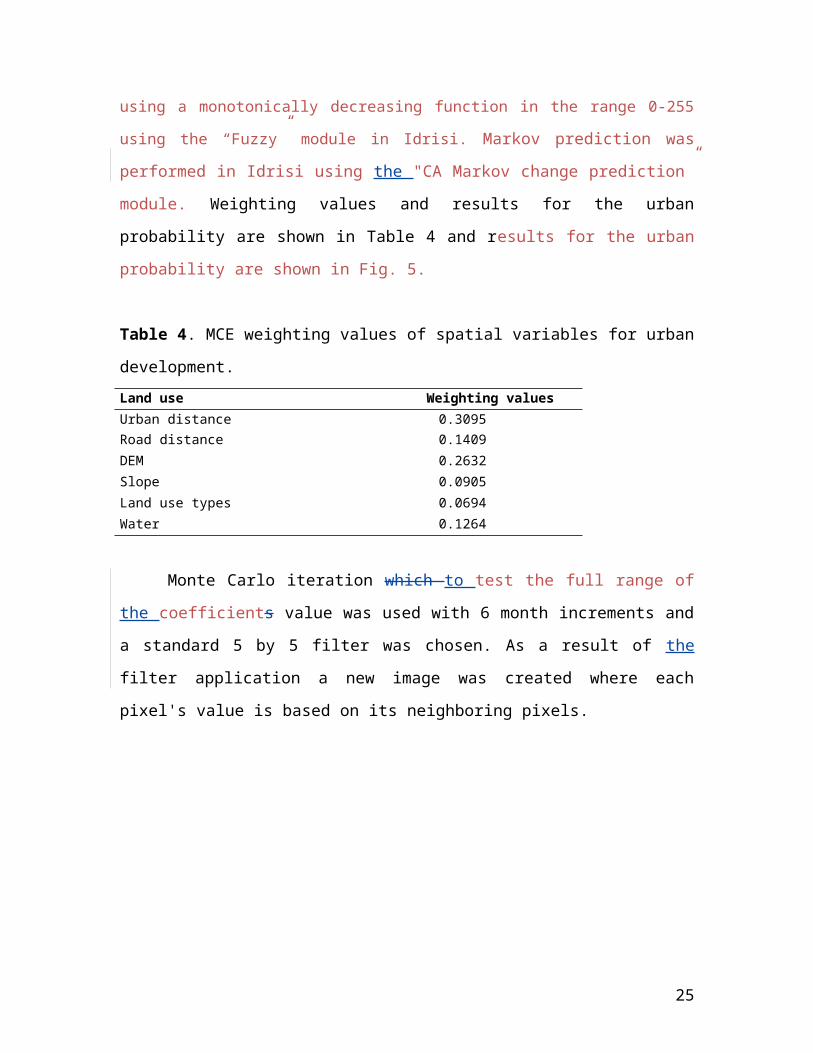
monotonically decreasing function in the range 0-255 using the “Fuzzy” module in Idrisi.
Markov prediction was performed in Idrisi using the "CA Markov change prediction”
module. Weighting values and results for the urban probability are shown in Table 4 and
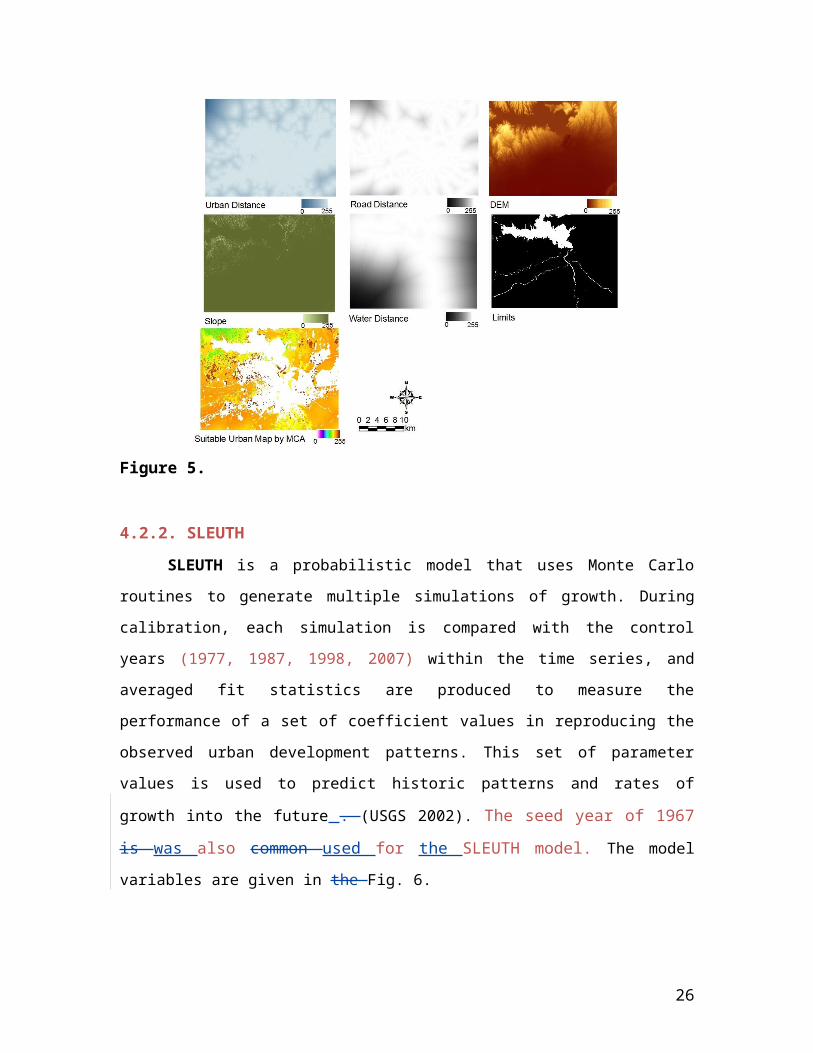
results for the urban probability are shown in Fig. 5.
Table 4. MCE weighting values of spatial variables for urban development.
Land use Weighting valuesUrban distance 0.3095Road distance 0.1409DEM 0.2632Slope 0.0905Land use types 0.0694Water 0.1264
Monte Carlo iteration which to test the full range of the coefficients value was used with 6 month increments and a standard 5 by 5 filter was chosen. As a
16

result of the filter application a new image was created where each pixel's value is based
on its neighboring pixels.
Figure 5.
4.2.2. SLEUTH
SLEUTH is a probabilistic model that uses Monte Carlo routines to generate multiple
simulations of growth. During calibration, each simulation is compared with the control years
(1977, 1987, 1998, 2007) within the time series, and averaged fit statistics are produced to
measure the performance of a set of coefficient values in reproducing the observed urban
development patterns. This set of parameter values is used to predict historic patterns and
rates of growth into the future . (USGS 2002). The seed year of 1967 is was also common
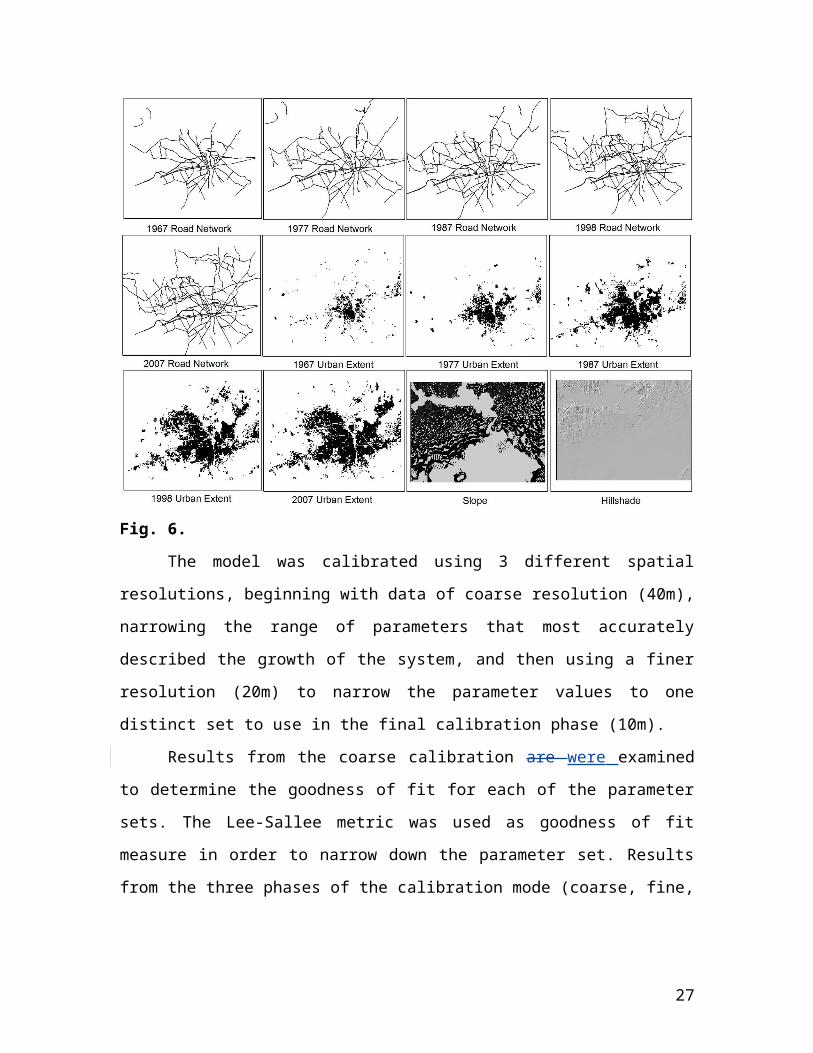
used for the SLEUTH model. The model variables are given in the Fig. 6.
17

Fig. 6.
The model was calibrated using 3 different spatial resolutions, beginning with
data of coarse resolution (40m), narrowing the range of parameters that most accurately
described the growth of the system, and then using a finer resolution (20m) to narrow the
parameter values to one distinct set to use in the final calibration phase (10m).
Results from the coarse calibration are were examined to determine the goodness
of fit for each of the parameter sets. The Lee-Sallee metric was used as goodness of fit
measure in order to narrow down the parameter set. Results from the three phases of the
calibration mode (coarse, fine, final and derive) are presented in table 5 which presents
the highest scores from model runs.
18
Table 5. Final calibration results and coefficient values for final and drive phases.
Product Compare Pop Edges Cluster Cluster Size LeesaleeCoarse 0.006 0.97678 0.99147 0.07394 0.60499 0.90081 0.41352Fine 0.02135 0.89927 0.9931 0.69567 0.75976 0.77954 0.40686Final 0.03838 0.89453 0.99362 0.64 0.7428 0.75544 0.40249
Slope %Urban Xmean Ymean Rad FmatchCoarse 0.93925 0.99134 0.7234 0.94417 0.9905 0.58997Fine 0.81331 0.99269 0.73476 0.40451 0.99203 0.5991Final 0.87589 0.99326 0.70301 0.8262 0.99245 0.59566
Diff Brd Sprd Slp RGCoarse 1 25 50 100 50Fine 1 25 60 50 25Final 1 24 62 38 30Derive 1 30 62 48 25
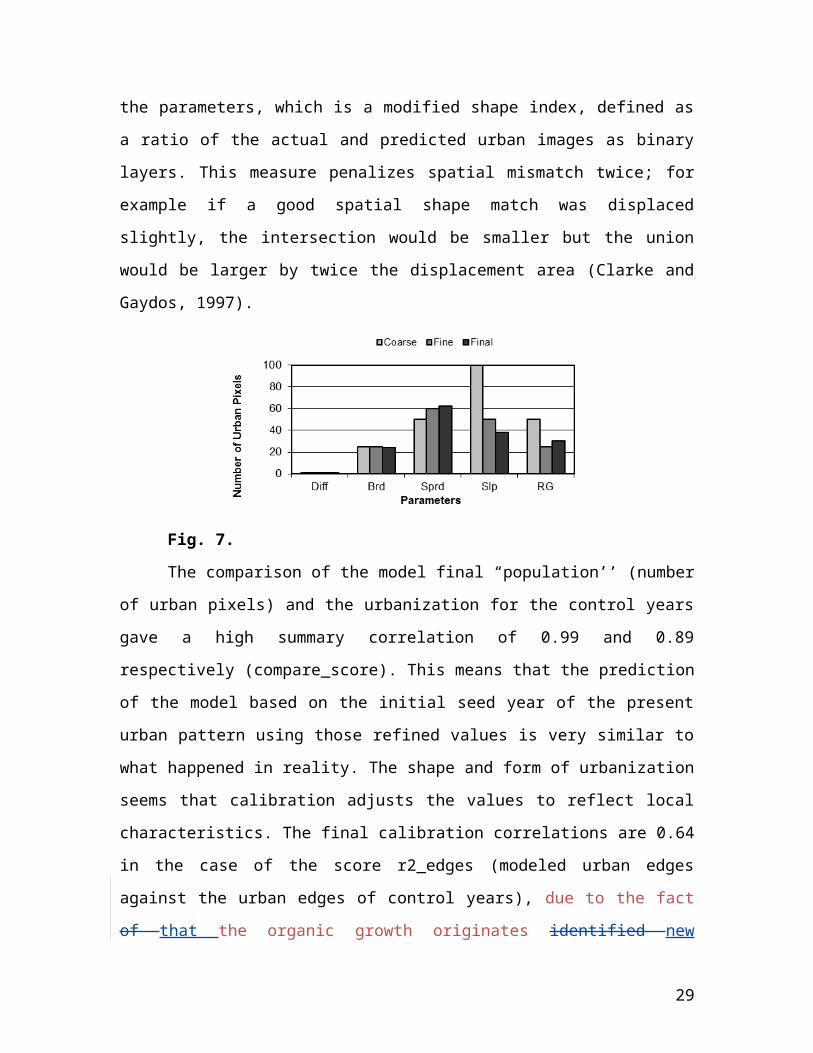
Tables Table 5 shows successive improvement in the parameters that control the
behavior of the system, although some measures decline at higher resolutions. (Fig. 7).
The Lee Sallee (Lee and Sallee, 1970) value was used to narrow the parameters, which is
a modified shape index, defined as a ratio of the actual and predicted urban images as
binary layers. This measure penalizes spatial mismatch twice; for example if a good
spatial shape match was displaced slightly, the intersection would be smaller but the
union would be larger by twice the displacement area (Clarke and Gaydos, 1997).
Fig. 7.
The comparison of the model final “population’’ (number of urban pixels) and the
urbanization for the control years gave a high summary correlation of 0.99 and 0.89
respectively (compare_score). This means that the prediction of the model based on the
initial seed year of the present urban pattern using those refined values is very similar to
what happened in reality. The shape and form of urbanization seems that calibration
19

adjusts the values to reflect local characteristics. The final calibration correlations are
0.64 in the case of the score r2_edges (modeled urban edges against the urban edges of
control years), due to the fact of that the organic growth originates identified new
structures and it is difficult to replicate these compared to known urban, and 0.74 in the
case of the cluster_r2 score (modeled number of urban clusters against known number of
urban clusters). The A high value of 0.99 for %Urban was acquired which is the least
squares regression of percentage of available pixels urbanized compared to the urbanized
pixels for the control years. For the Lee-Sallee value (degree of shape match between the
modeled growth and the known urban extent) 0.40 was achieved. Other studies have
shown that (Clarke and Gaydos, 1998, Silva and Clarke, 2002) it is difficult to obtain
high values of shape match (Clarke and Gaydos, 1998, Silva and Clarke, 2002). The A
value of 0.40 for the Lee-Sallee metric was equal to or better than that achieved in other
comparable SLEUTH applications.
The urbanization of the metropolitan area tended to occur outward from the main
nucleus and along the main transportation infrastructure. This explains why the final
spread_coefficient is was as high as 62.
4.2.3. LR, RT and ANN Models
CA modelling is the simulation process of the The LR, RT and ANN models.
They use similar steps in order to carry out the urban simulation with different level of
merits. The models were trained using predetermined spatial variables as inputs to
produce five probability maps as an outputs. First, a comparison of LULC maps derived
from two different dates (1967 and 1998; 1967 and 2007) were was performed and then
change analysis used to is conducted to identify the most effective urban growth
transformations like , such as i. agriculture to urban; ii. citrus to urban; iii. forest to urban;
iv. bare to urban; v. green to urban. Land use transformations is usually dependent on a
series of spatial variables in terms of proximityies. Each spatial variable took a weighting
value according to these transformations and the TPM was calculated for each of them.
Also for the training process, small descriptive subsets were extracted (Fig.8). The
models require continuous quantitative variables. For the prediction, the TMP maps were
overlaid together and served as a single map during the application. For LR, Idrisi
20

software; for RT, See5 and the Erdas Imagine NLSD tool and for ANN, MATLAB
software was used.
Figure 8. 2023 calibration process for the LR, RT and ANN models.
The TPMs was then integrated into a CA simulator Dinamica EGO 1.4.0 for the
future urban growth predictions. Expander and Patcher tools were used for the CA
simulation (Fig.9).
Fig.9.
Dinamica EGO (Environment for Geoprocessing Objects) which is written in C++
and Java, holds a series of algorithms called functors and composed of two
complementary “functors” the Expander and the Patcher, which are set to the average
size of patches, stains and the variances of the isometry. Increasing the patch size and
21
variance creates a less fragmented and a more diverse landscape. Isometry greater than
one gives more isometric patches. The first process is dedicated only to the expansion or
contraction of previous patches of a certain class, while the second process is designed to
generate or form new patches through a seeding mechanism. The Patcher searches for
cells around a chosen location for a joint transition. The process is started by selecting the
core cell of the new patch and then selecting a specific number of cells around the core
cell, according to the TPM (Dinamica, 2013).
The combination of the two processes is shown in the equation below (Filho et al.,
2013) :
Qij=r*(Expander Function)+s*(Patcher Function) (4)
Where Qij Stands for the number of transitions of type ij specified per simulation
step and r and s represent respectively the percentage of transitions executed by each
function, being that r+s=1. Both functions incorporate an allocation device which is
responsible for locating the cells with the highest transition probabilities for the given
transition. One step of Dinamica prediction corresponds to one year.
Dinamica EGO has successfully been applied in numerous environmental studies.
Examples of Dinamica EGO application include modeling tropical deforestation in the
Amazon from local to basin-wide scales (Soares-Filho et al., 2010 ); land use and cover
change in the Atlantic Forest (Texeira et al., 2009) and in the tropical dry forest of
Mexico (Cuevas et al., 2008); urban dynamics (Almeida et al., 2005; Godoy and Soares-
Filho, 2008); logging in the Amazon (Merry et al., 2009), and forest fire risk (Silvestrini
et al., 2011).
The calibration process was repeated for accuracy assessment. In other words, the
1967-1998 calibration was performed for the 2007 prediction (validation) and the 1967-
2007 calibration was performed for the 2023 prediction. Urban change and related spatial
variables were defined as response and predictor variables respectively. Multiple
regression tree models were built using various pruning and input band combinations.
500 randomly sampled pure pixels per class were used as training data, and 250 pixels
per class formed the testing data.
A rule set of conditions under each regression tree model was built. Error
estimates of the regression tree predicted probability images were made for model
22

validation. The average absolute error of the 2007 and 2023 probability image prediction
(by comparing model prediction against “true” values from the test data) are given in
table 6 (Cl refers to Class).
Table 6. Error and correlation matrix for Regression Tree.
1967-1998 1968-2007Cl1 Cl 2 Cl 3 Cl 4 Cl 1 Cl 2 Cl 3 Cl 4
Average error 19.4 6.7 5.8 2.4 22.6 6.5 4.8 0.7Relative error 0.3 0.32 0.36 0.49 0.29 0.32 0.3 0.28Correlation coefficient 0.89 0.85 0.8 0.63 0.9 0.85 0.86 0.87
Two rules generated from the regression tree model are presented here as an example:
Rule 1: [26319 cases, mean 0.1, range 0 to 10, est err 0.1] if
band02 <= 253 then
dep = 0.1
Rule 100: [741 cases, mean 212.4, range 83 to 250, est err 26.2] if
band03 > 220band04 > 179band06 > 27band06 <= 29band07 > 219
thendep = 1007.3 - 19.56 band06 - 1.23 band03 + 0.2 band07
where dep is defined as the response variable and presents historic urban change in the
model. The average absolute error of the urban change probability map prediction was
measured as 13% by comparing the model prediction of the known year against real
values from the test data.
With the LR, ROC (Receiver operating characteristic) statistics were obtained
after creating the probability maps for the time period of 1967-2007 (Table 7).
Table 7. Regression statistics for different time periods.Regression Statistics 1967-2007
Observed Fitted 0 Fitted 1 Percent correct0 175768 36471 82.811 31195 70147 69.21
23
ROC 0.82
The ROC method has been introduced to LULC modeling to compute the correlation
between simulated and actual changes (e.g., Pontius and Schneider, 2001). ROC = 1
indicates a perfect fit and ROC = 0.5 indicates a random fit. A highest value of 0.82 was
obtained, which verifies the accuracy of the LR model. However, the comparison of
actual and future simulation maps did not yield the same accuracy as described in the last
section.
Through a training/learning process, the ANN adjusts the weight and bias values
at the nodes and so determines the best suitable transition rules and parameters. The
outputs of the network are compared and evaluated with the targets that are samples of
the real world, e.g. the urban change data in this study. Then, based on this comparison,
the weight and bias values of the network are adjusted in order to reduce the difference
between the network outputs and the targets. This process is repeated until the difference
between the outputs and the targets reaches a previously set goal (Guan et al., 2005).
MATLAB software was used for ANN training process. Variables were scaled to the
range of 0-1. The number of training cycles was set at 2000 (fig. 10).
Fig. 10.
5. Discussion
This study has significance for the study area because: (i) it represents the first
urban growth modeling study for Adana City that uses different modeling approaches; (ii)
historic urban changes were measured and prediction was made with high spatial
24
resolution remotely sensed data; (iii) there is a lack of studies that evaluate land use
changes and urban development over a longer term history, such as from 1960.
The change detection results showed that there is a growing trend toward urban
areas at the expense of agricultural land. Approximately 161 km2 of new urban area was
gained mainly from the productive agricultural areas around the city center. By itself, 112
km2 of agriculture areas were converted primarily to urban and a total of 145 km 2 were
lost during the time period of the study. A second large urban transformation took place
on the bare ground and in green belts adding 27 km2 and 15 km2 of new urban area
respectively. The spatial prediction results for urban expansion showed that urban areas
have been expanding continuously. The direction of expansion is around the existing
urban areas and along transportation routes. Organic growth is highly characteristic of
Adana city.
Once each model had successfully replicated past urban expansion, it was used to
project future development of urban land uses. The predictive accuracy of the model was
evaluated by comparing the predicted and the actual map of urban areas on a pixel basis
for 2007. Current urban extent was the key factor for the comparison. The ‘traditional’
error matrix and Kappa coefficient and multiple map comparisons were used to assess the
accuracy (Congalton 1991; Pontius et al. 2001). Allocation and Quantity Disagreement
maps were prepared as described by Pontius et al. (2008). Each modeling application was
assessed statistically using: 1) a reference map of the initial time (1967), 2) a reference
map of the subsequent time (2007) and 3) prediction map of subsequent time (2007).
Two-map comparisons for each application were performed to derive: 1) dynamics of the
model (observed change), 2) the behavior of the model (predicted change) and 3) the
accuracy of the prediction (Pontius et al, 2008; Pontius and Spencer 2005; Pontius and
Millones, 2011). The sum of two components of quantity disagreement and allocation
disagreement provided more clear interpretation of the model results relative to the
Kappa ratio as both components were present in parts of the study area (Pontius and
Millones, 2011).
Modeling results were compared for the year 2007 (Fig. 11). All models
overestimated the urban prediction results.
25
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
Observed
Markov(Predict)
Markov(Error)
SLEUTH(Predict)
SLEUTH(Error)
ANN(Predict)
ANN(Error)
LogisticR(Predict)
LogicticR(Error)
RegressionT(Predict)
RegressionT(Error)
Disaggrement (Proportions of Urban Class)
Quantity Allocation
Fig. 11.
When the models predict the observed change accurately, then predicted change is
identical to observed change. For LR and RT models, most of the observed change was
allocation disagreement. However, when considering the gain and loss of built values, the
SLEUTH and Markov models were the most consistent models with the real data. ANN
has the highest disagreement value compared with other models. For example, ANN, LR
and RT models have the observed change value of 138 km2, 141 km2 and 138 km2
respectively, while the actual observed change was calculated as 136 km2. These models
have the closest urban change value of the real change which is inadequate to compare
model performance. Thus, disagreements maps enable us to produce the distribution of
predicted change in addition to the quantity of change. Quantity and Allocation
Disagreements maps are shown in Fig. 12.
26
27

Fig. 12.
Kappa accuracies were also calculated. The most accurate results were achieved
by SLEUTH, Markov Chain and RT with Kappa accuracies of 0.7463, 0.7214, and
28
0.7108 respectively. LR and ANN did not meet the expectations with lower Kappa
accuracies of 0.6640 and 0.6586 for the urban class respectively (Table 8).
Table 8. Kappa Index of Agreement values for different modeling approaches.
Markov Chain ANN SLEUTH Logistic Regression
Regression Tree
2007 Predicted Urban class
(km2)156 138 146 141 138
Urban class accuracy (KIA) 0.72 0.66 0.75 0.66 0.71
One of the most important findings was that the SLEUTH accuracy is actually higher
than 0.7463. After the last step of the modeling, the SLEUTH prediction maps were
passed back into the GIS without any coordinate information. A second rectification
process was performed to the SLEUTH thematic simulation map for Kappa calculation in
order to ensure perfect overlay of the predicted and actual 2007 maps. Root-mean square
(RMS) error was found to be 1.3 pixels.
6. Conclusions
The objective of this research was to quantify the amount of urbanization (as
urban/non-urban) and to select an appropriate model for the fast growing Mediterranean
city of Adana. Five different modeling approaches were applied including Markov Chain,
SLEUTH, LR, RT and ANN within CA modeling and the results were compared and
evaluated to find most appropriate model for this region.
The models used for this study can be sorted into two general categories:
statistical (LR, RT, ANN) and stochastic models (Markov Chain, SLEUTH). In statistical
based models urban dynamics take place through a set of statistic variables and historic
change itself is the dependent variable. These models are more data oriented and also
present different degrees of fit for the change potential to observed past changes (Mas et
al., 2014). Stochastic models predict future urban land use based on probabilistic
estimates and rules.
Results from the future modelling suggest that the SLEUTH, Markov Chain and
RT models generate better prediction for urban growth compared with RT and ANN
29

models. From the calibration point of view, the Markov Chain is considered somewhat
subjective due to the preparation of suitability maps using the weighting values which
need to be defined by the user. Once the proper weighting values are managed based on
expert knowledge, detailed information about LULC change is acquired and the model
performance can be improved. Besides, there is a growing approval that knowledge-
driven approaches like Markov Chains are more controllable than machine learning
approaches like ANN. (Vega at al., 2012; Mas et al., 2014; Arsanjani et al., 2013, Akın,
2012). Also, the rates of the observed change during the calibration are assumed to be
stable with the Markov method. The Markov chain approach led to an urban area of 59
km2 for 2023 (2023-2007) and 156 km2 (2007-1967) for 2007. The observed urban
change between 1967-2007 time period was 136 km2.
The most outstanding advantage of the SLEUTH model is the ability to get
periodic historical urban extent data as the control data during the calibration. Roughly
ten years increments separated the data layers used, i.e., including 1967, 1977, 1987,
1998 and 2007. The model is calibrated year by year. There are thirteen elements that
measure best fit statistics by comparing historical data and simulated growth. So, no
additional validation process is required. But in order to ensure comparability, KIA and
Allocation and Disagreement maps were applied. Boom and bust values were determined
only with the SLEUTH model. For the study, only historic change trends were
considered. Scenario development in the model is embedded within the excluded layers.
If the user does not use a scenario layer, then the model assumes the same growth trend
as in the past. One of the disadvantages for the SLEUTH model is that the calibration
process was time consuming. Recent SLEUTH model developments promise to reduce
this time considerably. The SLEUTH model application resulted in 146 km2 of total
urban area for 2007 and 75 km2 for 2023 respectively.
The advantage of the RT, RT and ANN techniques is the capacity to explore the
relationships between LULC transformations and their causative factors quantitatively,
which enables us to distinguish between the spatial variables (Park et al., 2011, Arsanjani
et al., 2013). Integrating the desired number of variables is possible. Weighting of the
spatial variables was performed objectively without any user knowledge. Determination
of the historic change map for the training is the key factor of the TPM calculation. Also
30

an additional CA predictor module or software is required for the future growth
estimation. These groups of models suffer from several limitations such as temporal
determination, quantification and allocation of change (Arsanjani et al., 2013; Hu and Lo,
2007). Exporting the outputs into a CA model eliminated this deficiency. Like the
Markov model, using a single period of data for the TPM can lead to forecasts that are
short-term and to discontinuous trends. Predictions based on a period of strong growth or
decline may tend to overshoot or undershoot the actual LULC change trends (Iacono et
al., 2012). Defining boom and bust values with multiple period data would prevent the
over/under estimation of the prediction maps substantially. Also, more descriptive
variables for the target state may increase the accuracy of the RT, RT and ANN models.
RT simulated urban growth for 2023 and 2007 with an area of 51 km2 and 138 km2; LR
simulated an area of 226 km2 and 164 km2; ANN simulated an area of 40 km2 and 138
km2 respectively.
According to the 1:100,000 regional plans, the development of the Northwestern
side of the study area is very likely. These pixels are mostly threatened agricultural areas
and have the highest urban probability values due to their closeness to the existing urban
pixels. Among the five techniques, SLEUTH was the most accurate one in predicting
these pixels as urban.
Different modeling approaches have their own merits and no single approach is
appropriate for all cases. In practice, different modeling approaches are often compared
to find the most useful results for a specific location. The selection of an appropriate
modeling technique is important. This study provided a better understanding of the
various techniques within a densely populated Mediterranean city. We hope that these
conclusions, forecasts and results are of use in other sustainable environmental planning
studies. In future work, we hope to better integrate physical and socio-economic variables
into the modelling approaches.
REFERENCES
31

Almeida, C. M., Gleriani, J. M., 2005. Cellular automata and neural networks as a
modelling framework for this simulation of urban land use change. Anais XII
Simpósio Brasileiro de Sensoriamento Remoto, Goiânia, Brasil, INPE, 3697-
3705.
Almeida, C. M., Gleriani, J. M., Castejon, E. F., and Soares-Filho, B. S. (2008). Using
neural networks and cellular automata for modelling intra-urban land-use
dynamics. International Journal of Geographical Information Science, 22(9), 943-
963.
Balzter, H., Braun, P. W., Kohler, W., 1998. Cellular automata models for vegetation
dynamics. Ecological Modeling 107, 113–125.
Batty, M., Couclelis, H., Eichen, M., 1997. Urban systems as cellular automata.
Environment and Planning B 24, 159–164.
Batty, M., Xie, Y., 1994. From cells to cities. Environment and Planning B: Planning and
Design 21, 531–548.
Bian, L., Walsh, S. J., 1992. Scale dependencies of vegetation and topography in
mountainous environment of Montana. Professional Geographer 45, 1–11.
Bourne, L. S., 1976. Monitoring change and evaluating the impact of planning policy on
urban structure: a markov chain experiment. Plan Canada 5–14.
Breiman, L., Friedman, J. H., Olshen, R. A., Stone, C. J., 1984. Classification and
Regression Trees. Wadsworth, Belmont.
Clarke, K. C., Hoppen, S., Gaydos, L., 1997. A Self-modifying cellular automaton model
of historical urbanization in the San Francisco Bay Area. Environmental and
Planning B 24, 247–261.
Clarke, K. C, Gaydos, L. J., 1998. Loose-Coupling a cellular automaton model and GIS:
long-term urban growth prediction for San Francisco and Washington/ Baltimore”
International Journal of Geographical Information Science 12, 699–714.
Congalton, R. G., 1991. A review of assessing the accuracy of classifications of remotely
sensed data. Remote Sensing Environment 37, 35–46.
Couclelis, H., 1997. From cellular automata to urban models: new principles for model
development and implementation. Environment and Planning B: Planning and
Design, 24 165-174.
32

Cuevas S G, Mas J-F., 2008. Land use scenarios: a communication tool with local
Communities. In: Paegelow M. & Camacho Olmedo M.T., Ed. Modelling
Environmental Dynamics, Springer-Verlag,.
Chen, Y., Li, X., Liu, X., Ai, B., 2013. Modeling urban land-use dynamics in a fast
developing city using the modified logistic cellular automaton with a patch-based
simulation strategy. International Journal of Geographical Information Science.
Dinamica Project, 2013. http://www.csr.ufmg.br/dinamica/
Eastman, J. R., McKendry. J., Fulk, M. A., 2005. Change and time series analysis.
Explorations in Geographic Informations Systems Technology. Geneva, United
Nations Institude for Training and Research (UNITAR).
Fan, F., Wang, Y., Wang, Z., 2008. Temporal and spatial change detecting (1998–2003)
and predicting of land use and land cover in Core corridor of Pearl River Delta
(China) by using TM and ETM+ images. Environmental Monitoring and
Assessment 137, 127–147.
Gilpin, M. E., 1990. Extinction of finite meta populations in correlated environments in
Shorrocks, B., Swingland, I.R. (Eds.), Living in A Patchy Environment. Oxford
University Press, New York, 177–86.
Guan, Q., Wang, L. and Clarke, K. C. (2005) An Artificial-Neural-Network-based,
Constrained CA Model for Simulating Urban Growth . Cartography and
Geographic Information Science, 32, 4, 369-380.
Hemphill, J. J., Clarke, K. C., Gazulis, N., Oguz, H., Dietzel, C., 2005. Diffusion and
coalescence of the Houston Metropolitan Area: evidence supporting a new urban
theory. Environment and Planning B: Planning and Design 32, 231-246.
Itami, R. M., 1994. Simulating spatial dynamics: cellular automata theory. Landscape
and Urban Planning 30, 24– 47.
Jantz, C, J., Goetz, S. J., Smith, A, J., Shelly, M., 2003. Using the SLEUTH Urban
growth model to simulate the impacts of future policy scenarios on land use in the
Baltimore-Washington metropolitan area. Environment and Planning B 31, 251-
271.
33

Li, X., Yeh, A. G., 2000. Modeling sustainable urban development by the integration of
constrained cellular automata and GIS. International Journal of Geographical
Information Science 14, 131-152.
Li, X., Yeh, A. G., 2002. Neural-network-based cellular automata for simulating multiple
land use changes using GIS, International Journal of Geographical Information
Science 16, 323-343.
Li, X., Liu, X., 2006. An extended cellular automaton using case-based reasoning for
simulating urban development in a large complex region. International Journal of
Geographical Information Science 20, 1109 -1136.
Liu H, Zhou Q, 2005, “Developing urban growth predictions from spatial indicators
based on multi-temporal images” Computers, Environment and Urban Systems 29
580–594.
Merry, F.; Soares-Filho, B. S.; Nepstad, D.; Aamacher, G.; Rodrigues, H. Balancing
Conservation and Economic Sustainability: The Future of the Amazon Timber
Industry. Environmental Management, EUA, 44 (3): 395-407.2009.
Michaelsen, J., Schimel, D. S., Friedl, M. A., Davis, F. W. and Dubayah, R. C. (1994),
Regression Tree Analysis of satellite and terrain data to guide vegetation sampling
and surveys. Journal of Vegetation Science, 5: 673–686.
Muller, R. M., Middleton, J., 1994. A Markov model of land-use change dynamics in the
Niagara region. Ontario, Canada. Landscape Ecology 9, 151–157.
Olden, J. D., Jackson, D. A., 2001. Fish–habitat relationships in lakes: gaining predictive
and explanatory insight by using artificial neural networks. Transactions of the
American Fisheries Society 130, 878-897.
Peng, C.J., So, T,H., Logistic Regression Analysis and Reporting: A Primer.
Understanding Statistics, 1:31-70.
Pontius, R. G., Cornell, J. D., Hall, C. A. S., 2001. Modeling the spatial pattern of land-
use change with geomod2: application and validation for Costa Rica agriculture.
Ecosystems and Environment, 1775 1–13.
Pontius, R. G., Shusas, E., McEachern, M., 2004. Detecting important categorical land
changes while accounting for persistence. Agriculture, Ecosystems and
Environment 101, 251–268
34

Pontius, R. G., Gilmore, R., Spencer, J., 2005. Uncertainty in extrapolations of predictive
land change models. Environment and Planning B: Planning and Design 32, 211-
230.
Pontius, R. G., Millones, M., 2011. Death to Kappa: birth of quantity disagreement and
allocation disagreement for accuracy assessment. Journal of Remote Sensing, 32:
4407-4429.
Pontius, R. G., Boersma, W., Castella, J. C., Clarke, C. K., Nijs, T., Dietzel, C., Duan, Z.,
Fotsing, E., Goldstein, N., Kok, K., Koomen, K., Lippitt, C. D., McConnell, W.,
Sood, A. M., Pijanowski, B., Pithadia, S., Sweeney, S., Trung, T. N., Veldkamp,
A. T., Verburg, P. H., 2008. Comparing the input, output, and validation maps
for several models of land change. The Annals of Regional Science 42, 11-47.
Rumelhart, D. E., Hinton, G. E, Williams, R. J., 1986. Learning representations by back-
propagation errors. Nature 323, 533-536
Ruxton, G. D., 1996. Effects of the spatial and temporal ordering of events on the
behaviour of a simple cellular automaton. Ecological Modeling 84, 311–314.
Shmueli, D., 1998. Applications of neural networks in transportation planning. Progress
in Planning 50, 141-204.
Silva, E. A., Clarke, K. C., 2002. Calibration of the SLEUTH urban growth model for
Lisbon and Porto, Portugal” Computers, Environment and Urban Systems 26,
525–552.
Silva, E. A., Clarke, C. K., 2005. Complexity, Emergence and Cellular Urban Models:
Lessons Learned from Appling SLEUTH to two Portuguese Cities. European
Planning Studies 13, 93-115.
Silvestrini, R.A.; Soares-Filho, B.S.; Nepstad, D.; Coe, M.; Rodrigues, H.O.; Assunção,
R. 2011. Simulating fire regimes in the Amazon in response to climate change and
deforestation. Ecological Applications, 21(5), 2011, pp. 1573–1590.
Soares-Filhoa, B., Moutinhob, P., Nepstadb, D., Andersond, A., Rodriguesa, H., Garciaa,
R., Dietzschb, L., Merrye, F., Bowmanc, M., Hissaa, L., Silvestrinia, R., and
Marettid, R. 2010. Role of Brazilian amozon protected areas in climate change
mitigation. Proceedings of the National Academy of the United states of America.
35

Stevens, D., Dragicevic, S., Rothley, K., 2007. iCity: A GIS-CA modelling tool for
urban planning and decision making. Environmental Modelling & Software 22,
761-773.
Syphard, A.D., Clarke, K. C., Franklin, J., Regan, H. M., McGinnis, M., 2011. Forecasts
of habitat loss and fragmentation due to urban growth are sensitive to source of
input data. Journal of Environmental Management 92, 1882-1893.
Teixeira, A. M.; Soares-Filho, B. S.; Freitas, S.; Metzger, J. P. W. Modeling Landscape
dynamics in the Atlantic Rainforest domain: Implications for conservation. Forest
Ecology and Management, 257, 1219–1230, 2009.
Tang, J., Wang, L., Yao, Z., 2007. Spatio-temporal urban landscape change analysis
using the Markov chain model and a modified genetic algorithm. International
Journal of Remote Sensing 28, 3255 –3271.
USGS, 2002. Project Gigalopolis: Urban and Land Cover Modeling.
http://www.ncgia.ucsb.edu/projects/gig/index.html
Weng, Q., 2001. A remote sensing-GIS evaluation of urban expansion and its impact on
surface temperature in the Zhujiang Delta, China. International Journal of Remote
Sensing 22, 1999–2014.
White, R., Engelen, G., 199. Cellular automata and fractal urban form: a cellular
modelling approach to the evolution of urban land use patterns. Environment and
Planning A, 25, 1175–1199.
White, R.W., Engelen, G., 1997. Cellular automaton as the basis of integrated dynamic
regional modeling. Environmental and Planning B 24, 235–246.
Wu, F., 2002. Calibration of stochastic cellular automata: the application to rural–urban
land conversions. International Journal of Geographical Information Science 16,
795–818.
Wu, F., Martin, D., 2002. Urban expansion simulation of Southeast England using
population surface modelling and cellular automata. Environment and Planning A,
34, 1855-1876.
Wu, F., Webster, C. J., 1998. Simulation of land development through the integration of
cellular automata and multicriteria evaluation. Environment and Planning B 25,
103–126.
36

Yang X, and Lo C P, 2003, “Modelling urban growth and landscape changes in the
Atlanta metropolitan area. International Journal of Geographical Information
Science 17, 463–488.
37