chapter 1 introduction - shodhgangashodhganga.inflibnet.ac.in/bitstream/10603/11716/6/06_chapter...
TRANSCRIPT
1
CHAPTER 1
INTRODUCTION
1.1 GENERAL
Fluid mixing and transport are important in many industrial
scenarios like mixing of pesticides, fibre mixing with water in paper industry,
dye mixing in textile industry, pharmaceutical industry etc.
Venturi-jet mixers can be used as a passive mixer in the flow line to
mix low viscous liquids rapidly with shorter mixing length. Tremendous
interests have been owing to many advantages of venturi-jet mixers such as
simplicity and reliability, low installation and operation costs, thermally
powered system.
A fundamental understanding of how venturi-jet mixers improve
the mixing should be useful in the future application of these mixers. As a
step toward developing such an understanding, this work reports on the
development and application of an experimental and numerical capable of
studying turbulent flows in venturi-jet mixers.
To the best of our knowledge, the present work is the first attempt
to apply experimental techniques and state-of-the-art CFD methods to the
study of 3-d turbulent mixing in venturi.
Because of the focus on mixing applications, which involve fully
turbulent flows in the venturi-jet mixer, the results presented in this work are
for jet injection angles, velocity ratio, and entrainment ratio at a Reynolds
number (Re) greater than 30000.

2
1.2 MOTIVATION
In order for the applications of transverse turbulent jet mixing of
two fluids at required proportion with shorter mixing length for industrial
applications, a method of jet mixing with crossflow must be developed. In
certain mixing applications, this is done by attaching a device called venturi-
jet mixer in the crossflow pipe line.
In addition to proportional mixing, attributes of the device include
elimination of additional pump and mixing enhancement. The mixer uses the
momentum of the crossflow to create a suction effect to pump in a secondary
flow (jet) of high tracer concentration. The jet and cross flows are then mixed
over a surface of complex geometry, transferring momentum to the jet.
The device also affects the pressure at the exit of the mixer, thus
affecting the power requirement of the mixer. Conventional transverse jet
mixers operate at low Reynolds number and require a secondary pump to
inject the jet into the crossflow. The venturi-jet mixer would operate at high
Reynolds number to produce the suction effect and the required mixing
quality by turbulence.
Very little work on venturi-jet mixers has been published.
However, some of the work (Boume and Garcias-Rosas 1986, Studer 1990)
reports that they show promise as passive mixers because of the extremely
intense turbulence that they produce without mixing elements.
The effectiveness of a venturi-jet mixer depends upon many things,
for example the flow pattern, pressure drop and rate of mixing; when
designing the mixer it is advantageous to have knowledge of these quantities.
It is also desirable to have other information, such as concentration decay, jet

3
path, jet velocity decay and how the mixer will contribute to pumping the
process fluid. All of this information is sparse in the literature.
Since the availability of information required to design the mixer is
limited, this work aims to improve the state of the knowledge - through an
experimental and numerical study. Flow rates of the flowing fluids,
concentration distribution information and pressure drop data need to be
produced to allow the design of a venturi-jet mixer. Therefore the research
was specifically focussed on the investigation of in-line mixer that fits into a
process pipeline.
1.3 NEED FOR THE RESEARCH
The conventional mixing of the primary and secondary flow in a
mixing tube is very slow, which is performed mainly by a small scale viscous
mixing in a shear layer. Thus, a conventional mixer requires a long mixing
tube to entrain the secondary flow. Also a long mixing tube results in large
wall friction loss, extra weight and higher cost. Their performance is
unsatisfactory or unreliable when ratio adjustments are required.
On account of the above disadvantages of conventional systems,
venturi-jet mixer systems have received great attention by many researchers
in the recent years and they have been widely applied to the fluid mixing area.
A venturi-jet mixer is a simple device for mixing two fluid streams.
Researchers have reported jet trajectories, mixing pattern, pressure drop data,
and G-value for variety of static mixers except venturi-jet mixers over the past
few decades.
Passive mechanisms have been studied extensively, however,
previous research on passive mixing by venturi-jet mixer has concentrated on

4
typically one of the geometric factors, and an overall view of geometric
configuration and their effect on mixing is not clear.
None of the previous studies considered the effects of increased
flow rate, inertia and varied injection angle. With the transverse jet mixing,
the flow distance required to achieve a certain degree of mixing is a function
of both the method of injection and the crossflow mixing governed by
crossflow characteristics (Fitzgerald and Holley 1979).
In order to improve the efficiency of such devices, it is important to
obtain more insight into turbulent mixing. In the numerical and experimental
investigation of turbulent mixing, it is necessary to obtain the velocity and
concentration field, simultaneously, since the mixing process can be described
as the interaction between a velocity and concentration field.
Jet injection systems due to suction effect created by the crossflow
in the venturi-jet mixer were the subject of this investigation because the
mixing is greatly enhanced by the turbulence and counter rotating vortex pair
created just downstream of injection. In brief, passive mixing by using
venturi-jet mixer is challenging and attracts the attention of many researchers.
This work presents the results for a wide range of jet injection
angles and Reynolds number in a venturi-jet mixer. In this thesis, mixing of
two streams with similar physical properties and different tracer concentration
is focussed. The jet trajectories and mixing performance is determined by
numerical procedure and experimental data.
Because of the focus on the mixing applications, which involve
fully turbulent flows, the results presented in this work are different injection
angles (45o
o 135o) and jet to cross flow momentum ratio for a span of
Reynolds number based on hydraulic diameter from 32000 to 51000.

5
In the present work, five arbitrary injection angles 45o, 60
o, 90
o,
120o and 135
o are studied numerically and experimentally to investigate the
effect of injection angle on the mixing performances of venturi-jet mixer
systems. In this study the cross flow effect on the jet motion, such as on jet
trajectory, jet width growth, and concentration decay in venturi-jet mixer is
predicted by mathematical calculation.
An experimental investigation is used to validate the conservation
equations derived theoretically based on the mass, momentum and tracer
concentration written in natural coordinate system and to compare the results
obtained using CFD analysis. The effect of the jet angle and momentum ratio
on the trajectory and mixing has also been studied experimentally and
numerically as it is significant in obtaining an optimum engineering design.
1.4 OBJECTIVES AND SCOPE OF THE RESEARCH
The primary objective of this work is to characterize the
performance of venturi-jet mixers at high Reynolds numbers and at different
jet injection angles. Tests were conducted on the venturi-jet mixers of varied
jet injection angles at high Reynolds numbers.
Concentration, flow rates, and pressure obtained from those tests
are used to determine the performance of the mixers in terms of concentration
decay, jet to crossflow pumping and mixing metrics.
The experimental results are then compared to the numerical
solutions obtained from mathematical formulations in natural coordinate
system and CFD analysis. The end result serves as a base of knowledge useful
to the design of a venturi-jet mixer. To accomplish the primary objective, two
major objectives and sub objectives are evolved and performed.
6
The major objectives of this work as follows:
The first major objective is to experimentally and theoretically
analyse by writing the conservation equations in natural
coordinate system to explore the effects of concentration
dependent fluid properties on the flow structure and mixing
characteristics of transverse jet in a venturi-jet mixer (novel in-
line mixer) without mechanical assists.
To set up a suitably instrumented flow loop system
incorporating the venturi-jet mixer unit.
Mathematical formulation of the mixer in natural coordinate
system along with the initial and boundary conditions.
Obtaining solutions for the partial differential equations by
finite difference method.
Comparing the numerical results for jet trajectories and
mixing behaviour of the mixer with the experimental results.
Arriving at the correlations for jet trajectories and
concentration decay by multi-variate regression analysis.
Calculation of velocity ratio and entrainment ratio and
plotting them with respect to jet injection angles and
crossflow Reynolds number.
Studying the influence of jet injection angles and crossflow
Reynolds number on jet trajectories and mixing performance
of the mixer.
7
The second major objective is to analyse the mixer
characteristics using CFD package.
Choosing the appropriate turbulence model for the study.
Modelling and meshing the mixer using GAMBIT software.
Fixing the mesh size of the mixer by comparing the
turbulent kinetic energy.
Solving the model by applying the boundary conditions
using FLUENT software.
Presenting the plane concentration profile of the jet in the
downstream locations.
Comparing the predicted jet trajectories and mixing
performance with the experimental results.
The scope of this research is restricted by several aspects. High
Reynolds number turbulence flow happens to be prevailing for low viscous
mixing fluids in the venturi-jet mixer. For the jet diameter of 1 or 2mm, the
mass of entraining fluid is very much less compared to mass of motive fluid.
Hence the entrainment ratio is low.
Many industrial mixing processes take place in two phases, under
turbulent flow conditions, because the mixing properties of turbulent flows
are superior to the ones of laminar flows (Ottino 1990). Therefore, highly
viscous fluids with large entrainment ratio and two phase mixing are outside
of the scope of this research. The research focuses on turbulent mixing of two
liquids with nearly water density and less entrainment ratio in the mixer.

8
The outcome of this study could be useful to further understand the
flow and mixing characteristics in the venturi-jet mixer at various jet injection
angles and operating conditions and to design such a mixer.
1.5 LITERATURE REVIEW
A review of the literature on the jets in crossflow, scalar variance,
CFD, as well as previous research of venturi-jet mixer systems is provided in
this chapter.
A literature review was performed on the jets in crossflow since it
was used to obtain the flow and mixing behaviour of fluids in order to
validate the numerical model with the experimental data.
As mixing in venturi-jet mixer comprised by turbulent jet in the
venturi, previous works of jet in crossflow were also looked at so that basic
insight into such structures can be gained in order to obtain jet trajectories
correlation.
Similarly, scalar variance was studied, as concentration decay
correlations along the mixer downstream distances, shall be developed from
the numerical models made.
Finally, in this section some basics of CFD and earlier work done
in the CFD analysis of the transverse jet mixers were discussed as it provides
insight on the modelling procedures and techniques used to obtain accurate
results of the mixer.
1.5.1 Jet in Crossflow
Jet in crossflow (JICF) configuration is typically constituted by a
jet that issue into a cross-flow. Turbulent jets in a crossflow have been used in

9
many engineering fields. Among various configurations of jets in a crossflow,
turbulent plane jets injected normally into a uniform cross stream have
numerous applications. Industrial mixing, film cooling, effluent discharged
into the atmosphere and into water bodies are a few examples of such
applications.
1.5.2 Physical Flow Phenomenon of JICF
The complicate nature of the JICF is illustrated in Figure 1.1, where
the flow behaviour for a velocity ratio R = 2 is represented. This figure was
obtained from the flow-visualization measurements of Foss (1980), and from
the velocity measurements of Andreopoulos and Rodi (1984).
Figure 1.1 Schematic diagram of the vortex system associated with
the JICF
The most obvious feature of the JICF is the mutual deflection of jet
and crossflow. The jet is bent over by the cross-stream, while the cross-stream
is deflected as if it were blocked by a rigid obstacle. Figure 1.1 shows also
that the fundamental characteristics of the JICF are dominated by a complex,
three-dimensional, inter-related set of vortex systems in the lee of the jet.

10
1.5.3 Class Structures of Vortices
With reference to Figure 1.1, Vanessa et al. (2005) classified the
main structures as follows:
Class 1 structures
Class 2 structures
1.5.3.1 Class 1 structures
The class 1 structures are originated by the interaction of the jet
with the crossflow and the wall and cannot be recognized in free jets (Vanessa
et al. 2005). Among structures of this kind the following vortex systems are
included (Andreopoulos 1984 and Camussi 2002):
Counter-Rotating Vortex Pair (CRVP)
Horseshoe Vortices (HSV)
Upright vortices (UV)
Counter-rotating vortex pair (CRVP)
The CRVP, Figure 1.2, is the most dominant vortex system and is
generated as an effect of the bending of the jet itself. The mechanism for the
formation of the CRVP is not yet fully understood. It can be taken as certain,
that the vorticity of the CRVP has its origin at the side-walls of the jet.
In fact, Haven et al. (1997) investigated different nozzle geometry
for the jet and discovered that for rectangular jets the amplitude of the CRVP
depends on the aspect ratio of the jet section. A variety of interpretations of
CRVP and its origin have evolved over the years. In general, however, CRVP
is widely viewed to be formed by the vortex sheet or thin shear layer
emanating from the jet nozzle.

11
Figure 1.2 Counter-rotating vortex pair
It is generally accepted that the shear layer of the jet folds and rolls
up very near to the pipe exit, leading to or contributing to the formation of the
CRVP, although there are questions pertaining to the nature of vortex roll-up
near the jet exit. Tilting and folding of the vortical structures are seen to
contribute to the downstream components of vorticity which form, on an
averaged basis, counter-rotating vortical structures. The origin and
development of the CRVP are important because control of vorticity
generation and evolution is a mean of controlling transverse jet mixing and,
potentially, reaction processes.
Horseshoe vortices (HSV)
The HSV, Figure 1.3, is formed upstream of the jet and close to the
wall and result from the interaction between the wall boundary layer and the
round transverse jet. HSV are found to be steady, oscillating, or coalescing.
Frequencies of oscillation have been found to be correlated with periodic
motions of upright vortices.
Upright vortices (UV)
The UV are generated by the interaction of the wall boundary layer
with the jet flow and, for low Rej , are the only unsteady structure.
12
Figure 1.3 Streamlines obtained experimentally by Roshko (1994) for
velocity ratio R = 2 and Recf = 7600 for planes at z = 0+,
z = 0.5D and z = 1D
1.5.3.2 Class 2 structures
The class 2 structures are proper for free jets, but their vorticity
content, evolution and destabilization are in some way influenced by the
presence of the crossflow. Structures of this kind are:
13
Ring-Like Vortices (RLV)
The Ring-Like Vortices (RLV) are formed from the shear layer of
the jet flow and their shape and spatial evolution is distorted by the presence
of the cross-stream. With the CRVP, they determine the dominant features of
the velocity and vorticity fields and their dynamics is of great interest from
the practical viewpoint since they are mainly responsible for mixing and for
mass, momentum and heat transfer.
1.5.4 Three Distinct Regions of JICF
Krothapalli et al. (1981), Raman and Taghavi (1996), and Smith
and Mungal (1998), divided the flow obtained from a JICF into three regions;
the potential core region, in the first few diameters from the jet exit; the near-
field region, just beyond the potential core, where the flow is fully turbulent
but has not deflected appreciably, and the far-field region, where the jet’s
flow has turned almost completely into the crossflow.
Demuren (1986), Sherif and Pletcher (1991), Said et al. (2005) also
classified the jet flow field of jet in crossflowing stream into three distinct
regions. In the first region, the initially uniform jet flow interacts with the
ambient crossflow causing a shear layer to develop at the jet boundaries.
Upstream of this region, the crossflow is decelerated and a positive pressure
region is formed. The length of the initial region depends on the jet diameter,
velocity ratio and jet discharge Reynolds number.
The second region is the main region or the established flow region,
where the jet experiences maximum deflection. This region is complex, being
characterized by the development of turbulent mixing layer around the jet
boundaries and the flow becomes fully turbulent. Due to shearing action of
the crossflow, the jet sides experience strong lateral deflections.

14
The third region is the far field region, where the jet axis
approaches the crossflow direction asymptotically and the flow field becomes
nearly self-similar. In this region, the magnitude and direction of the jet
velocity are close to those of the cross flowing stream and it becomes difficult
to distinguish between crossflow and jet fluids.
1.5.5 Early Jet Mixing Researches
Investigations on the JICF have started in the 1930s (Schlichting
and Andew 1933). Since, there have been numerous investigations on the
JICF leading to the perception that the JICF, in contrast to other flows like
jets and mixing layers, cannot be described in terms of self similarity and
Reynolds dependence, due to the strong nonlinear effects. The systematic
analysis of the JICF started in 1970s with the discovery and acceptance of
coherent structures that are able to explain various nonlinear effects in the
JICF. Figure 1.1 shows JICF with associated counter rotating pair of vortical
structure.
Carter (1969) studied heated turbulent plane jets in a confined
crossflow where he measured the temperature trajectories, defined as the
locus of local maximum temperature, for three different values of jet to cross
stream velocity ratios (R).
Kamotani and Greber (1972) measured the velocity and
temperature distribution downstream of a heated turbulent round jet injected
into a subsonic cross-flow for several momentum-flux ratios. The results
showed that the jet structure is primarily dominated by a vortex pair formed
behind the jet. At lower flux ratios, the jet is deflected sharply and the vortices
do not have time to develop. Therefore, the kidney shape structure remains
present into the far downstream. However at higher momentum flux ratios the
vortices become stronger and dominate the flow field. The results also
15
indicated that the jet velocity and temperature trajectories strongly depend
upon the momentum flux ratio.
Turbulent jets in crossflows have been investigated extensively
(Rajaratnam 1976 and Wright 1977). Wright (1977) divided the flow in the
deflected jet into two main regions, referred to as the momentum dominated
near field (MDNF) and the momentum dominated far field (MDFF). The
MDFF is followed by a passive plume region (PPR) where the mixing and the
resulting dilution are due to the turbulence in the ambient flow. The transition
from the MDFF to the PPR was assumed (Rajaratnam and Langat 1995) to
occur where the excess velocity in the jet above that of the crossflow velocity,
v falls to about 1% of (uo-v) where uo is the velocity of the jet at the nozzle.
Maruyama et al. (1981, 1982) studied the jet injection of fluid into
the pipeline over several pipe diameters from the injection point, and
proposed the standard deviation as an indication of mixing quality.
The dilution characteristics and the plume trajectory of the tee
diffusers have been studied by several investigators in order to provide basic
information for the siting and design of the diffuser (Adams 1982).
Andreopoulos and Rodi (1984) reported on measurement in flow
generated by a jet issuing from the circular outlet in a wall into a cross-stream
along this wall. A quantitative picture of complex three-dimensional mean
low and turbulence field and the velocity ratio dependence parameters were
presented.
Ferrell and Lilley (1985) conducted experiments of the flow field of
a deflected jet in a confined (non-swirling) cylindrical crossflow. They found
that the jet penetration was reduced from that of comparable velocity ratio
infinite crossflow cases. Their measurements confirmed that the deflected jet
is symmetrical about the vertical plane passing through the cross-flow axis.

16
Isaac and Jakubowski in 1985 performed detailed velocity and
Reynolds stress measurements of twin jets injected normally to a crossflow.
Their results showed a striking similarity in terms of mean velocities and
turbulent parameters between the tandem jets and a single jet in a crossflow
(Hatch et al. 1996).
A jet exhausting perpendicularly into a crossflow deflects,
increases in lateral extent, distorts in cross sectional shape and evolves into a
flow field that is dominated by a pair of counter-rotating vortex (CVP) (Roth
1988).
Vranos et al. (1991) conducted an experimental study of jet mixing
in a cylindrical duct. Planar digital imaging was used to measure the
concentration of an aerosol seed uniformly mixed with the jet stream, in
several planes downstream of the mixing orifices. The results showed that for
an axis-symmetric geometry, mixedness was more sensitive to circumferential
uniformity rather than jet penetration.
1.5.6 Recent Jet Mixing Researches
Many attempts have been made by the researchers over the past
decade to analyse the flow phenomenon and also to improve the mixing
efficiency of a jet in crossflow.
A heated and unheated lateral jets discharging into a confined
swirling cross flow was numerically investigated by Chao and Ho (1992).
They studied variations of parameters like jet temperature, jet-to-crossflow
velocity ratio, jet number and swirl length. The results show that the jet
decaying process is almost independent of the temperature difference between
the heated jet and the crossflow. The jet spreading process is dependent on the
inlet mass flux ratio and the mixing conditions.

17
Margason (1993) provided an extensive review of past work before
1993 on jet in cross flow. In many of the studies, the main interests are the
trajectories prediction, the formation, evolution and interaction of CRVP and
their respective applications. Both experimental and computational efforts
were conducted to investigate the details of different flow structures of JICF.
Sarkar and Bose (1995), predicted characteristics of a two-
dimensional turbulent plane jet in a crossflow where a cold jet stream is
discharged into a strong cross stream ( 1.0). They computed flow field and
surface temperature distributions along with the turbulence quantities to
illustrate the flow physics involved.
Su and Mungal (1999) conducted experiments to analyse the
structure and scaling of the velocity and scalar fields using PIV and PLIF
measurement techniques. The measurements provided a comprehensive view
of the velocity and conserved scalar fields in the developing region of the flow.
All measurements are made at a single jet-to-crossflow velocity ratio of 5.7.
A round jet injected into a confined cross flow in a rectangular
tunnel was simulated using Reynolds-averaged Navier-Stokes equation with
the standard k- turbulence model by Holdeman et al. (1999). The principal
observations was that the turbulence Schmidt number had a significant effect
on the prediction of the species spreading rate in jet in crossflow, especially
for the cases where the jet-to-crossflow momentum flux are relatively small.
Kalyan et al. (2002) performed numerical predictions of turbulent
plane jets discharged normal to a weak or moderate cross stream. The
Reynolds-averaged Navier–Stokes equations with the standard k- turbulence
model have been used to formulate the flow problem. The results show that
while mixing of the two streams the local maximum mean velocity (um)
decreases along the jet trajectory. Also, it was concluded that the amount of

18
penetration of the jet into the crossflow and deflection of the jet depend upon
the value of velocity ratio.
Wegner et al. (2004) studied turbulent mixing using Large Eddy
Simulation (LES). They varied the angle between the jet and the crossflow.
The mixing was enhanced as the angle was increased i.e. as the jet was
directed against the crossflow. The baseline flow in their simulation was that
measured by Andreopoulos and Rodi (1984).
Petri and Timo (2006) performed the Large Eddy Simulation (LES)
of a turbulent jet in a cross-flow with steady-state and unsteady boundary
conditions. On the whole differences between the cases are relatively small in
this flow. The LES with the unsteady condition possesses a stronger back-
flow in the lee of the jet where the cross-stream-wise velocity profiles along
the vertical lines are steeper.
Manabendra et al. (2006) performed a computational investigation
of three-dimensional mean flow field resulting due to the interaction of a
rectangular heated jet issuing into a narrow channel crossflow. The
commercial code FLUENT 6.2.16 based on the finite volume method was
used to predict the mean flow and temperature fields for the jet to crossflow
velocity ratio = 6. Two different turbulence models, namely, Reynolds-stress
transport model (RSTM) and the standard k- model, were used for the
computations.
Muppidi (2006) studied the different aspects of round single jets in
a crossflow using direct numerical simulation (DNS). Trajectories and the
near-field were studied. A length scale is proposed to describe the near-field
of the jet. He pointed out that as a jet issues into the crossflow, it deflects in
the direction of crossflow then a pair of counter rotating vortices is generated.
19
A three-dimensional numerical model for a round jet discharged at
right angles into a cross flow in shallow water body is developed based on the
two-equation k nonlinear model and VOF method by Yuan (2006). The
study focused on the dilution produced in the mixing region by the jet. Based
on a lot of simulating with jet velocities varied from 1 to 12 times the mean
velocity of the cross flow, the bed effect and the free surface effect on the
concentration distribution were revealed.
Nirmolo et al. (2008) studied numerically the multiple jet
discharged radially into a reactive and a non-reactive crossflow in a
cylindrical chamber using Fluent CFD code. The optimum mixing conditions
for both reactive and non-reactive flows were obtained at normalised
momentum flux ratio of 0.3 with a penetration depth of 0.6. This condition is
valid for all number of nozzles.
Amighi et al. (2009) presented experimental results on the
penetration of a water jet in a crossflow under atmospheric and elevated
pressures and temperatures. Images of the jet at various test conditions were
obtained, using pulsed laser sheet illumination technique. Time-averaged and
filtered images were used to determine the spray centre, windward and
leeward trajectories. Using a regression analysis, two correlations were
obtained for the windward and centre trajectories of the spray as a function of
liquid to crossflow air momentum ratio, and the channel and the liquid jet
Reynolds numbers.
1.5.7 Important Parameters of JICF
Operating conditions for the jet in crossflow are often characterized
in terms of a variety of parameters which influence the physical behaviour
and that are used to scale the characteristic features of the JICF.

20
From this view-point, the most important parameters are the mean
jet-to-crossflow momentum flux ratio, J, the mean scalar jet-to-crossflow
velocity ratio, R, and the Reynolds numbers, Rej and Recf, which are defined
as follows (Vanessa et al. 2005):
21
22
, ,Re ,Rej
cf j
cf cf j
u uD vdJ R J
v
where u and v stand respectively for the jet and the crossflow velocity, d is the
jet diameter and j, cf, j and cf are respectively the density and the
kinematic viscosity of the flow for the jet and for the crossflow.
For incompressible flows, where density is approximately constant,
R = u/v. The independent non-dimensional parameters typically used are the
mean scalar jet-to-crossflow velocity ratio and one of the Reynolds number.
Beyond the complex dynamics, difficulties in studying this subject are also
related to the combined effects of these parameters.
1.5.8 Scalar Variance
The scalar variance is a key indicator of the extent of mixing and is
studied by many researchers for the different velocity ratios. The work of Nye
and Brodkey (1967) was one of the earliest studies to focus on the
downstream evolution of the scalar variance and scalar spectrum. These
authors used dye injection and optical measurement to make concentration
measurements of dye injected coaxially into the main pipe flow.
Measurements were made at up to 36 diameters downstream and indicated an
exponential decay of the scalar variance.
Hartung and Hibby (1972) performed a similar fundamental study,
the difference being the way the two scalars were introduced into the pipe.
The pipe was initially divided down the centre resulting in two separated

21
streams. Concentration measurements were made out to 80 pipe diameters
downstream of the initial mixing location and showed an exponential rate of
decay throughout the measurement region.
Several subsequent studies have been performed, focusing
primarily on optimal design of mixing configurations in pipes, (e.g. Forney
et al. (1996), Ger and Holley (1976), Fitzgerald and Holley (1981), Edwards
et al. (1985), O’Leary and Forney (1985), Sroka and Forney (1989), and
Forney (1986)).
Most of the early studies on scalar mixing in pipes focused on the
scalar variance decay and the relation to Corrsin’s theory (Corrsin 1964) for
scalar variance decay in stirred tanks. The studies of Nye and Brodkey (1967),
Hibby and Hartung (1972), among others exhibited consistency with this
theory. Much subsequent theory has involved relating Corrsin’s theory
(Corrsin 1964) for mixing in stirred tanks to pipe flow mixing by
approximating the mixing evolution as a series of stirred tanks with the
dimensions of the pipe diameter moving along at the mean fluid velocity
(Smith 1981).
1.5.8.1 Power-law scalar variance decay
More recently, an analytical study by Kerstein and McMurtry
(1994) predicted that the scalar variance decay in pipe mixing should
transition from an exponential decay to power-law decay in the far field: a
prediction not observed in any previous experimental mixing studies.
The transition to power-law decay was associated with the
emergence of long-wavelength scalar fluctuations. These fluctuations were
shown to grow with the square root of downstream distance and would
eventually be much larger than any characteristic scale of the fully developed
turbulent velocity field.

22
To experimentally investigate this theory, Guilkey et al. (1997)
devised a set of experiments that allowed for a much idealized initial scalar
field in the pipe, providing an experimental analogue of the Kerstein-
McMurtry (1994) theory.
Using a flow seeded with a caged fluorescein dye, Guilkey et al.
(1997) were able to selectively uncage or ‘‘mark’’ regions of the flow at
regular intervals. This generated an initial scalar concentration similar to that
used in the Kerstein- McMurtry (1994) analysis.
Measurements made at up to 120 pipe diameters downstream
showed a clear transition from exponential to power-law decay, confirming
the predictions of the McMurtry- Kerstein (1994) theory. To further
investigate this behaviour and to explain the lack of a region of power-law
decay in any of the previous works addressed above, additional experiments
were performed looking at potential variations relating to how the scalar was
injected into the main flow (Guilkey et al. 1997, Hansen et al. 2000).
With the exception of the work of Hartung and Hibby (1972), none
of the studies cited above reported variance decay statistics beyond a few tens
of pipe diameters downstream, a key reason why the transition to a slower
mixing rate was not observed. These later experimental studies (Guilkey et al.
1997 and Hansen et al. 2000) successfully explained differences among
previous studies and showed evidence that the initial conditions could be
manipulated to delay or expedite the onset of the transition to power-law
scalar variance decay.
1.5.8.2 PDF of concentration
Cambell et al. (2004) presented the scalar variance at the centerline
normalized by the local mean centerline concentration, c/c’. The variance was
calculated over the entire 60 s signal.

23
Figure 1.4 shows the probability density function (PDF) at the last
measurement station (x/D = 120.1) with the concentration normalized by the
rms (the normalized pdfs of the other runs show a similar behaviour). As the
fluid in the pipe approaches a fully mixed state, the scalar pdf approaches a
Guassian as shown in Figure 1.4.
Figure 1.4 Probability density function of concentration at last
measurement station (x/d = 120). Scaled by the rms.
The dilution produced by a circular jet in crossflow in the mixing
region, defined as the region in which significant dilution occurs because of
jet mixing, was investigated by Hodgson and Rajaratnam (1992). In this
mixing region, using the concept of the MDNF and MDFF and experimental
observations, x/d was found to be a characteristic dimensionless distance
(Hodgson and Rajaratnam 1992) and the minimum dilution defined as co/cm
was given by the equation (Ahmed et al. 2001):
0.56
1.09o
m
c xR
c d (1.1)

24
where co is the concentration at the nozzle, cm is the maximum concentration
at any downstream section, R is the velocity ratio and x is the downstream
distance along the crossflow from the nozzle producing the jet of diameter d.
For a diffuser with multiple jets in crossflow, it is possible that the
minimum dilution would increase rapidly with the downstream distance.
Mixing would be affected by the momentum fluxes and the interaction
between the different jets and with the ambient current. It is very likely that
all the three regions (MDNF, MDFF and PPR) would exist.
1.5.9 Mixing Process
Mixing is one of the most common operations playing an
important and sometimes controlling role in industrial processes including
chemical, petrochemical, oil and metallurgical industries. The term “Mixing”
is applied to processes used to reduce the degree of non-uniformity or system
gradient property such as temperature, concentration, and viscosity. Mixing is
used in diverse process situations such as blending, dispersing, emulsifying,
suspending and enhancing heat and mass transfer. Consequently, a very wide
range of mixers and/or mixing equipment is available to suit various
applications. Mixing occurs when a material is moved from one region to
another region. In the past it may have been of interest to achieve a required
degree of homogeneity but now it is also being used to enhance heat and mass
transfer, often with a system undergoing chemical reaction.
1.5.9.1 Static mixers
Static mixers, also known as motionless or in-line mixers,
constitute a low-cost option in many process industries (Gray 1986, Sroka
1989). Static mixers find applications in wide variety of processes such as
blending of miscible fluids both in laminar and turbulent flows, mixing and
dispersion of immiscible fluids by helping to generate an interface, solid

25
blending, heat and mass transfer and homogenization (Etchells & Meyer
2004). These processes, in turn, serve many industries such as chemical and
agricultural chemicals production, grain processing, food processing, minerals
processing, petrochemical and refining, pharmaceuticals and cosmetics,
polymers, plastics, textiles, paints, resins and adhesives, pulp and paper, water
and waste water treatment. In particular, static mixers are easily used for
homogenisation of different liquid, gas or grain components.
(a)
(b)
Figure 1.5 (a) Picture of SMX static mixer (Hirschberg et al. 2006)
(b) Blue colour concentrate is added to water in the pipe axis.
A homogeneous mixture is achieved with a few SMX mixing
elements (Static mixer). (Courtesy Sulzer Chemtech)
Static mixers offer attractive features such as closed-loop operation
and no moving parts, in contrast to continuously-stirred tank mixers (dynamic
mixers) (for example, Streiff and Rogers, 1994). Static mixers also come with
26
self cleaning features. Interchangeable and disposable static mixers are also
available (Etchells & Meyer 2004). Advantage of this mixing technology is
very less maintenance, which is a result of the absence of any dynamic
devices.
Figure 1.5 shows a static mixer consists basically of a sequence of
stationary guide plates which result in the systematic, radial mixing of media
flowing through the pipe. The flow path follows a geometrical pattern,
precluding any random mixing. The mixing operation is therefore completed
within a very short flow distance as shown in Figure 1.5. In contrast to stirred
tanks or empty pipe systems, static mixers ensure that the complete fluid
stream is subjected to compulsory or enforced mixing or contacting. The
energy required for mixing or for mass transfer is taken from the main stream
itself, which is manifested by an insignificantly higher pressure drop than in
an empty pipe system.
Benefits of static mixers
Static mixers deliver a high level of mixing efficiency, therefore
the consumption of dosed chemicals and formation of
byproducts can be dramatically reduced.
They eliminate the need for tanks, agitators, moving parts and
direct motive power and they allows gaining highly efficient
mixing with low energy consumption.
The energy required for mixing is efficiently extracted as
pressure drop from the fluid flow through the elements. Mixers
are invariably installed in existing systems without reducing the
capacity of existing pumps.
The installation is very easy; no special skills are required other
than normal engineering skills.
27
Mixers have no moving parts and are virtually maintenance
free.
Static Mixers are available in all standard pipe sizes and, in the
case of open channel.
1.5.9.2 Pipeline side Tee-mixer
Mixing problems, such as the design and scale-up of a mixer and
quantification of mixing, have been traditionally tackled by developing
empirical design equations mainly due to the complexity of the fluid
dynamics of mixing. Although this approach has proven to be satisfactory for
many applications, it is rather limited because it neglects the complexity of
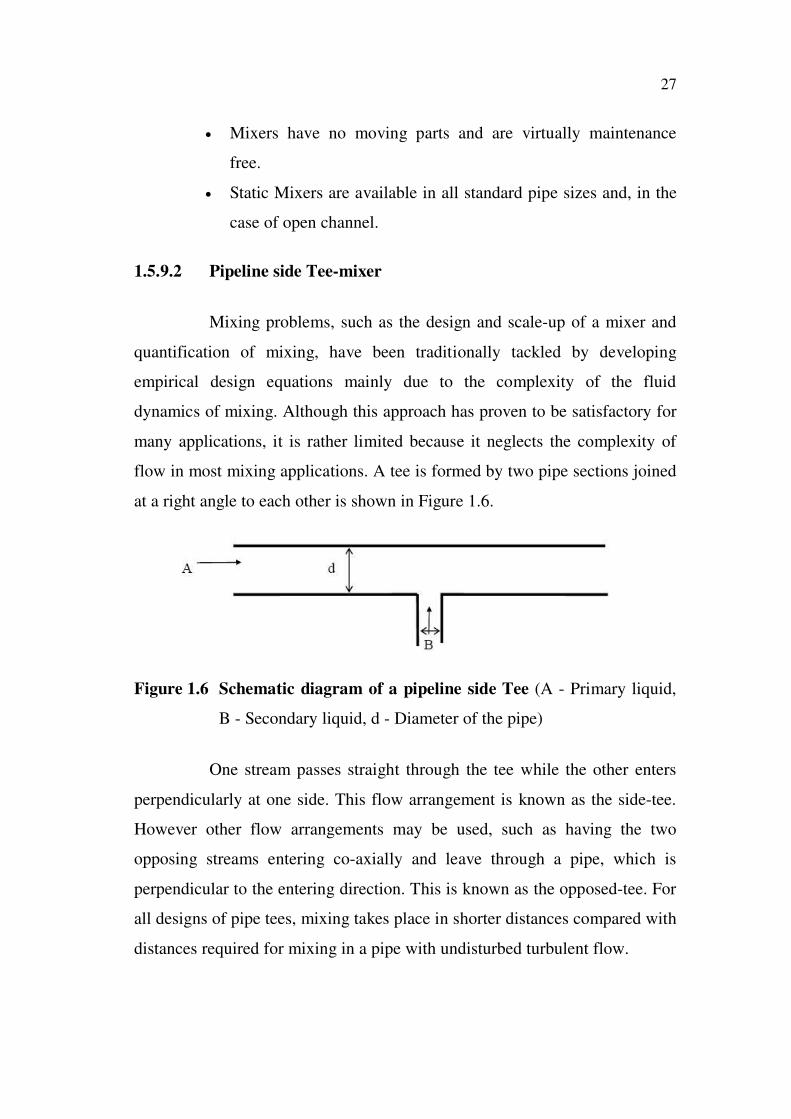
flow in most mixing applications. A tee is formed by two pipe sections joined
at a right angle to each other is shown in Figure 1.6.
Figure 1.6 Schematic diagram of a pipeline side Tee (A - Primary liquid,
B - Secondary liquid, d - Diameter of the pipe)
One stream passes straight through the tee while the other enters
perpendicularly at one side. This flow arrangement is known as the side-tee.
However other flow arrangements may be used, such as having the two
opposing streams entering co-axially and leave through a pipe, which is
perpendicular to the entering direction. This is known as the opposed-tee. For
all designs of pipe tees, mixing takes place in shorter distances compared with
distances required for mixing in a pipe with undisturbed turbulent flow.

28
1.5.9.3 Active and passive mixers
In general, mixing strategies can be classified as either active or
passive, depending on the operational mechanism.
Active mixers
Active mixers like stirring tanks employ external forces, beyond
the energy associated with the flow, in order to perform mixing. A distinct
advantage over passive type mixers is that these systems can be activated on-
demand. While generally effective in generating turbulence for rapid fluid
mixing in short length-scales, these designs are often not easy to integrate
with the in line process equipments and typically add substantial complexity
in the fabrication process. Moreover, since high electric fields, mechanical
shearing, or generation of nontrivial amounts of heat are involved, they are
not well suited for use in applications involving sensitive species (e.g.,
biological samples).
Passive mixers
Passive mixers, on the other hand, avoid these problems by
exploiting characteristics of specific flow fields to mix species without
application of external electrical or mechanical forces. These gentle designs
are also often more straight forward to build and interface with in line process
equipments.
In static mixers, especially turbulent jet mixers, mixing
preliminarily depends on the formation of counter rotating vortex pair and
turbulent intensity. As a consequence, the distance it would take to obtain a
uniform mixing of two liquids across the mixer, may require a long distance
depending on the jet to crossflow momentum ratio involved (Monclova and
Forney 1995, Maruyuma et al. 1982).

29
This problem has motivated several researchers, over the last few
decades, to design an appreciable number of passive mixers. Among these,
venturi-jet mixers are the most efficient ones, the reasons being that venturi
shape provides exponential growth of the contact interface between two
liquids and entrainment of tracer due to suction effect.
1.5.10 Venturi-jet Mixers
The use of venturi-jet mixers in continuous processes is an
attractive alternative to conventional agitation since similar and sometimes
better performance can be achieved at lower cost.
As they have no moving parts, venturi-jet mixers typically have
lower energy consumptions, smaller space requirements, low equipment cost
and reduced maintenance requirements compared with mechanically stirred
mixers as shown in Figure 1.7. They offer a more controlled and scaleable
rate of dilution in fed batch systems and can provide homogenization of feed
streams with a minimum residence time. They also provide good mixing at
low shear rates where locally high shear rates in a mechanical agitator may
damage sensitive materials.
Figure 1.7 Mechanical stirred tank mixers (Bakker et al. 2001)
30
1.5.10.1 Entrainment mechanism in a venturi tube
The converging tube is an effective device for converting pressure
head to velocity head, while the diverging tube converts velocity head to
pressure head. The two may be combined to form a venturi tube, named after
Venturi, an Italian, who investigated this principle in 1791. It was applied to
the measurement of water by Clemens Herschel in 1886.
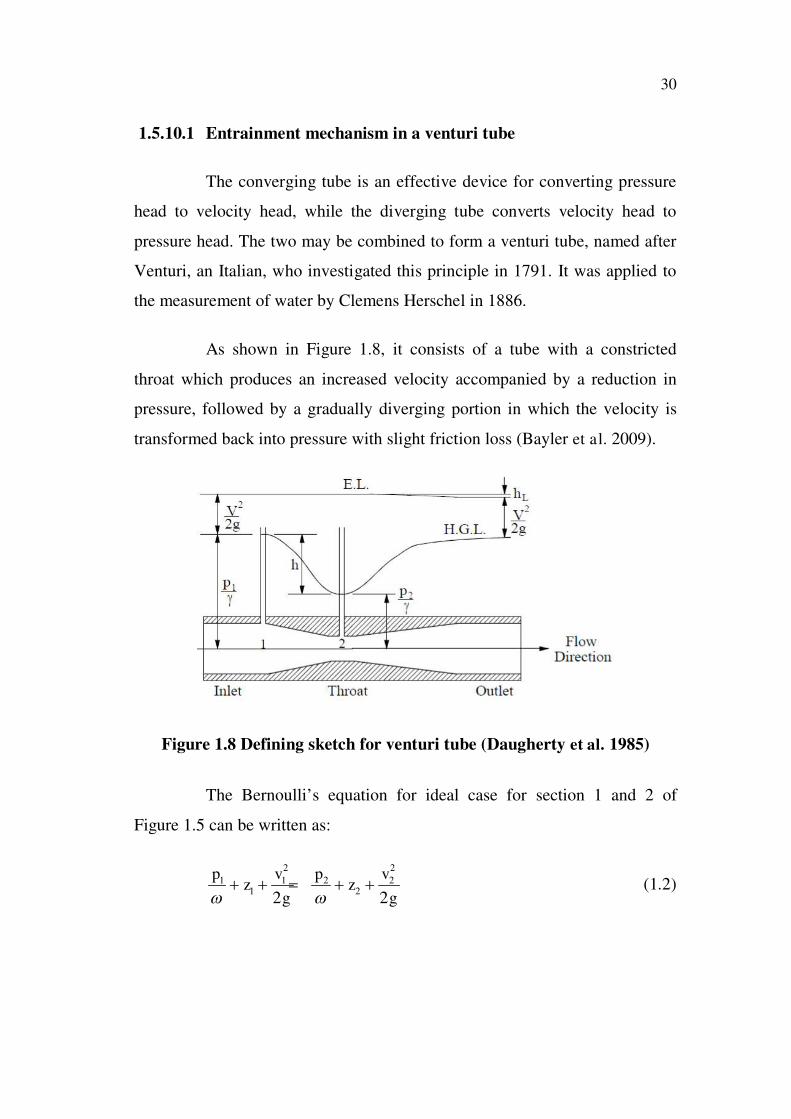
As shown in Figure 1.8, it consists of a tube with a constricted
throat which produces an increased velocity accompanied by a reduction in
pressure, followed by a gradually diverging portion in which the velocity is
transformed back into pressure with slight friction loss (Bayler et al. 2009).
Figure 1.8 Defining sketch for venturi tube (Daugherty et al. 1985)
The Bernoulli’s equation for ideal case for section 1 and 2 of
Figure 1.5 can be written as:
2 2
1 1 2 21 2
2 2
p v p vz z
g g (1.2)
31
where 1 and 2 are subscripts indicating points 1 and 2; p1 and p2 are pressures;
is specific weight; z1 and z2 are elevations; v1 and v2 are velocities and g is
gravitational acceleration.
Since z1 = z2, Equation (1.2) may be written as:
2 2
2 1 1 2
2 2
p p v v
g g (1.3)
The venturi effect happens due to pressure drop in the throat
portion as velocity in the throat portion increases. The increase in velocity v2
through the throat portion of the venturi tube, as a result of the differential
pressure, results in a decrease in pressure p2 in the throat portion (Daugherty
et al. 1985).
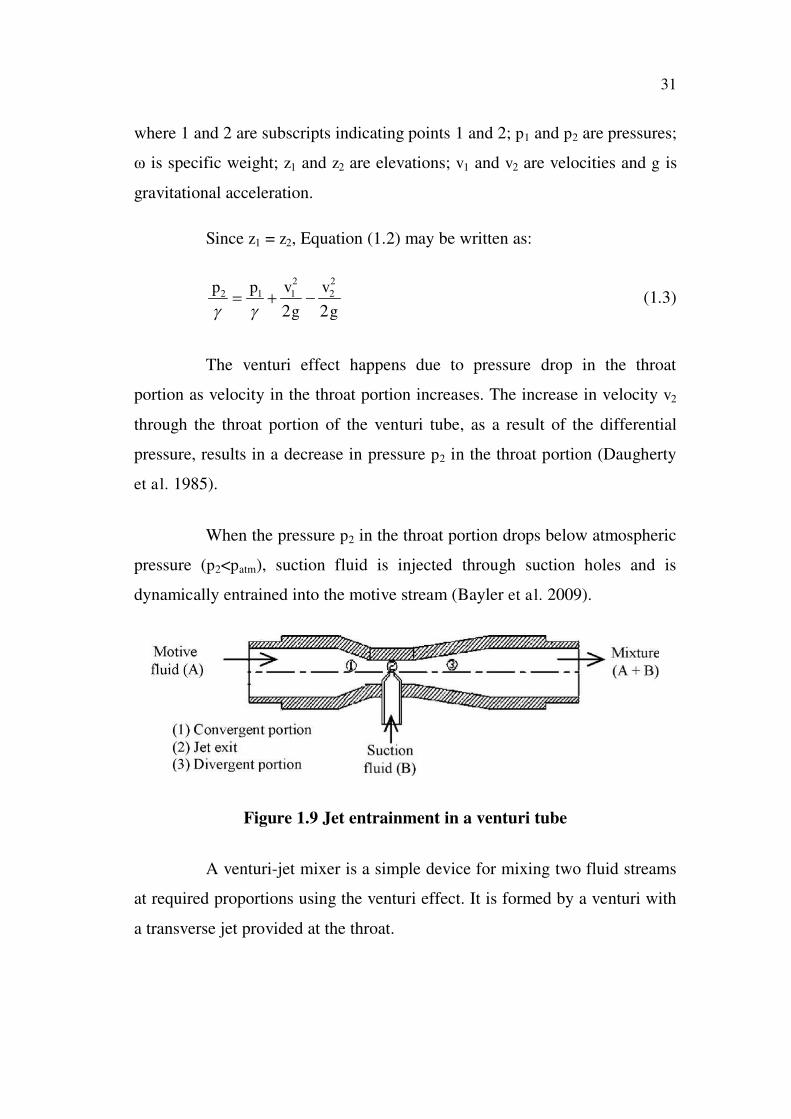
When the pressure p2 in the throat portion drops below atmospheric
pressure (p2<patm), suction fluid is injected through suction holes and is
dynamically entrained into the motive stream (Bayler et al. 2009).
Figure 1.9 Jet entrainment in a venturi tube
A venturi-jet mixer is a simple device for mixing two fluid streams
at required proportions using the venturi effect. It is formed by a venturi with
a transverse jet provided at the throat.

32
One fluid stream (motive fluid or crossflow) passes through the
venturi while the other stream (suction fluid or secondary fluid or jet fluid)
enters through jet into a venturi due to low pressure created at the throat of the
venturi as shown in Figure 1.9. The low pressure created at the throat portion
of the venturi due to change in cross section area lead to the proportional
mixing of two liquids.
1.5.10.2 Previous works on venturi-jet mixers
Eric Haliburn invented the venturi-jet mixer in 1924 to rapidly mix
a continuous supply of cementitious grout for cementing oil wells (Mathys
2004).
Collins and Willis (1970) found that a venturi type mixing unit can
also be used for mixing two fluid streams such as water and soil conditioning
fluid such as liquid insecticides, pesticides, fertilizers, or of other stimulants
for plant growth. The mixing characteristics were determined with regard to
mixing ratio.
A venturi device made from standard sizes of polyvinyl chloride
plumbing and rod-stock material was tested at Little Port Walter, an estuary in
southeastern Alaska (William and Frederick 1978). When installed in a
gravity-fed freshwater delivery system, the venturi injected seawater into the
discharge water to produce a stable water flow of intermediate salinity. The
use of interchangeable components with different-sized openings permits
regulation of the salinity of the discharge water.
Stephen et al. (1990) studied the characteristics of siphon-jet flows
for several geometric configurations and flow speeds. A general method for
optimising the design of liquid / liquid jet pumps was suggested by Vyas and
Kar (1972) in which component dimensions (suction nozzle, driving nozzle,

33
mixing tube and diffuser) were expressed as dimensionless ratios. They
described the entrainment of the suction fluid by viscous friction and
acceleration of the resulting mixture by momentum transfer with the driving
fluid in the mixing tube (throat); complete mixing was assumed by the end of
the throat, as is the case with other researchers (Raynerd 1987 and
Bonnington 1964).
In a series of bench mark studies of mixing by Liscinsky and True
(1996), the venturi mixing performance was improved by free stream
turbulence and mainstream swirl. The results were compared for a jet-to-
mainstream momentum flux ratio of 8.5.
Jean-Michel (2005) developed a venturi mixing device to mix
liquid fertilizer with water and suggested that without any manipulation /
adjustment, intimate mixing could be obtained in the course of distribution.
Recently, Baylar and Emiroglu (2003), Emiroglu and Baylar
(2003), Baylar et al. (2005), Baylar and Ozkan (2006), Ozkan et al. (2006)
and Baylar et al. (2007 a, 2007 b) studied the use of venturi tubes in water
aeration systems.
Fahri et al. (2006) investigated pond aeration by two phase flow
systems such as high head gated conduit flow systems and two phase pipe
flow systems using venturi tubes. When the gate of a high head outlet conduit
is partly opened or a minimal amount of differential pressure exists between
the inlet and outlet sides of the venturi tube, air suction occurs at air vents. In
two phase flow systems, air that is entrained into the water will be
momentarily forced downstream in the form of small air bubbles. The
dissolution of oxygen into the water results from the air suction downstream
of high head gated conduit and venturi tube, and the rising air bubbles into
pond.

34
Baylar et al. (2007) investigated the effect of the venturi tubes with
diameters of 36 mm, 42 mm and 54 mm on air injection rate. In the flow of
the fluid through a completely filled venturi tube, gravity does not affect the
flow pattern. Thus, the Reynolds number was used as dimensionless
parameter and varied between 35000 and 437000. They concluded that
venturi tube does not require external power to operate. It does not have any
moving parts, which increases its life and decreases the probability of failure.
The venturi tube is usually constructed of plastic and it is resistant
to most chemicals. It requires minimal operator attention and maintenance. As
the device is very simple, its cost is low. It is easy to adapt to most new or
existing systems provided that there is sufficient pressure in the system to
create the required pressure differential.
In a practical situation, economic considerations will establish the
appropriate compromise involving tank size, jet diameter and flow rate,
venturi and air hole geometry that will lead to optimum aeration efficiency.
1.5.11 Computational Fluid Dynamics Analysis of Mixer
CFD is the science of predicting fluid flow, heat transfer, mass
transfer, chemical reactions, and related phenomena by solving the
mathematical equations which govern these processes using a numerical
process. This technique has become so important that it now occupies the
attention of perhaps a third of all researchers in fluid mechanics and the
proportion is still increasing (Ferziger and Peric 1996).
One of the reasons for its popularity is that it can be used to solve
real world problems. Solving the equations for fluid flow exactly is almost
always impossible, except in some special cases.
35
In CFD, the equations of fluid flow have to be discretized, which
means that the domain of interest (e.g. the air surrounding a car or the water
inside a turbine) has to be subdivided into small elements (together they are
called the grid or the mesh). This also means that the solution (the velocity,
pressure, etc.) is not available in the entire flow domain but only at each
element.
Discrete cells
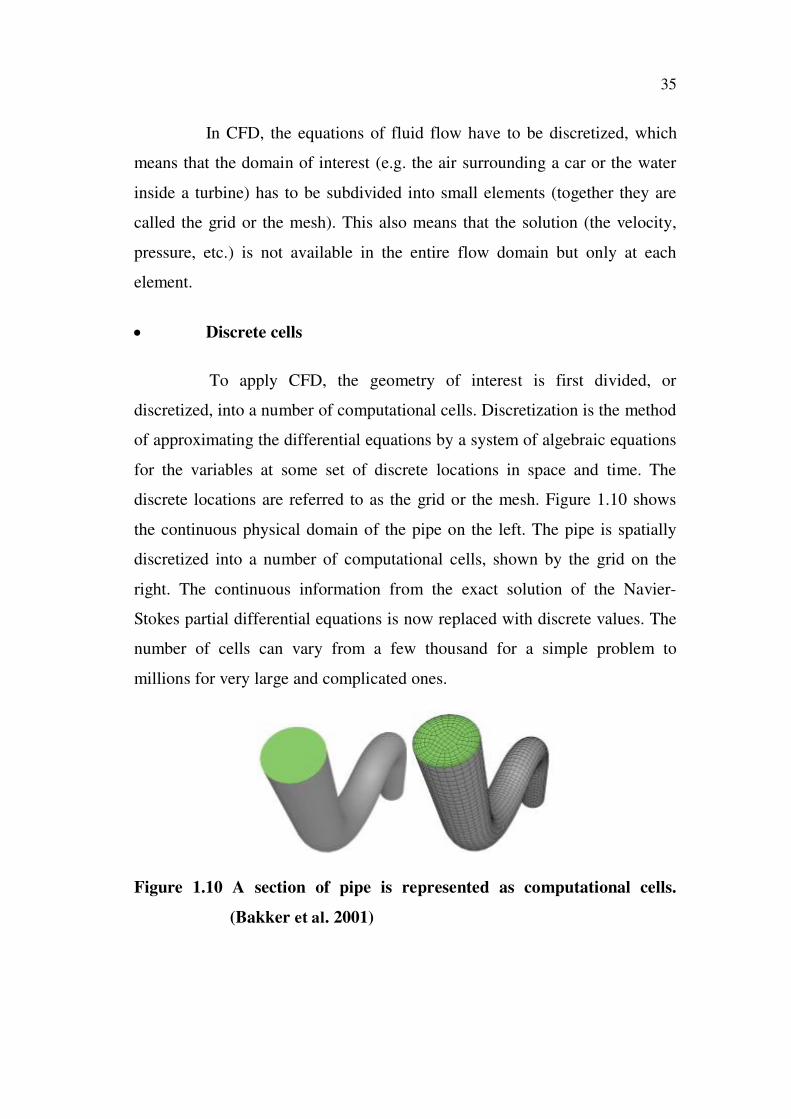
To apply CFD, the geometry of interest is first divided, or
discretized, into a number of computational cells. Discretization is the method
of approximating the differential equations by a system of algebraic equations
for the variables at some set of discrete locations in space and time. The
discrete locations are referred to as the grid or the mesh. Figure 1.10 shows
the continuous physical domain of the pipe on the left. The pipe is spatially
discretized into a number of computational cells, shown by the grid on the
right. The continuous information from the exact solution of the Navier-
Stokes partial differential equations is now replaced with discrete values. The
number of cells can vary from a few thousand for a simple problem to
millions for very large and complicated ones.
Figure 1.10 A section of pipe is represented as computational cells.
(Bakker et al. 2001)

36
Boundary conditions and solution
Once the grid has been created, boundary conditions need to be
applied. Pressures, velocities, mass flows, and scalars such as temperature
may be specified at inlets; temperature, wall shear rates, or heat fluxes may be
set at walls; and pressure or flow-rate splits may be fixed at outlets. The
component material transport properties, such as density, viscosity, and heat
capacity, need to be prescribed as constant or selected from a database. These
can be functions of temperature, pressure, or any other variable of state.
Fluids can be modeled as either incompressible or compressible. The
viscosity of the fluid can be either Newtonian, or non-Newtonian, using the
power law, Herschel-Bulkley, Carreau, or viscoelastic models. In mass- or
heat-transfer applications, binary diffusivities and thermal properties need to
be defined as well. With the grid created, the boundary conditions and
physical properties defined, the calculations can start. The code will solve the
appropriate conservation equations for all grid cells using an iterative
procedure. Typical CPI process problems involve solving for:
Mass conservation (using a continuity equation);
Momentum (using the Navier- Stokes equations);
Enthalpy;
Turbulent kinetic energy;
Turbulent energy dissipation rate;
Chemical species concentrations;
Local reaction rates; and
Local volume fractions for multiphase problems.
It is important to understand that a CFD solution to a particular
problem involves approximations at several levels. The equations being
solved are a model of reality, not reality itself. Secondly, when the equations
are discretized, approximations are introduced. If it was possible to use an

37
infinite number of elements it would be possible to get very close to the exact
solution. But since computers are not infinite fast with infinite memory, there
is a limit on the number of elements that can be used. Therefore we cannot
resolve everything inside the flowing fluid (Baylar et al. 2009).
The actual CFD solving process is often done in steps (iterations)
towards the exact solution. This process has to be stopped at some level which
means that the exact solution to the discretized equations is never reached (but
it is possible to get very close) (Ferziger and Peric 1996).
1.5.11.1 Previous works on CFD analysis of transverse mixers
Mixer design is slowly changing from being a complete
experimental process to a partially numerical and experimental one.
Numerical simulation has an advantage that analysis and optimization can be
done before the device is built. Consequently, the design of new mixing
devices becomes less expensive and at the same time faster.
Chang and Chen (1994) analysed the mixing of opposing heated
line jets discharged normally or at an angle into horizontal cold crossflow
rectangular channel by using k- turbulence model. The results indicate that
turbulence kinetic energy is high in the region where vertical velocity gradient
is steep.
Recently, some numerical studies have been performed on two- or
three-dimensional turbulent mixing with mass or heat transfer for simple
geometries (Monclova and Forney 1995).
There have been several previous efforts to model the flow in
transverse mixers using CFD. Xiaodong Wang et al. (1999) used a
commercial CFD code to analyse the mixing performance of transverse
mixers that was used in a silo unit for the mixing of fibre with water.

38
Diego and Timothy (2004) simulated the effect caused by obstacles
in the throat of the venturi on the flow field of a compressible, steady state,
single phase, fully turbulent flow and mixing using a commercial CFD
package. First, a 2-D axisymmetric geometry was used to study a venturi
without restrictions. Second, a 3-D geometry was used to see the effect of
different diameters and insertion lengths of the fuel tube, as well as the impact
of a secondary fuel tube passing through the venturi throat. The results
showed that obstacles in the throat of the venturi created a recirculation zone
with high turbulence intensity. A larger fuel tube produces stronger
turbulence and larger recirculation zones, while a small secondary fuel tube
creates additional recirculation zones at the top of the venturi that interact
with those at the bottom. These zones may influence secondary droplet
formation and mixing downstream of the venturi.
Veronica and Joel (2004) conducted study to evaluate the use of
CFD for analysing mixing effectiveness of low-energy mixers in water and
waste-water treatment process. In this study CFD was used to predict
downstream mean tracer concentration and segregation intensity in different
closed conduit reactor geometries. Mixing configurations include a plane
shear layer, plane jet in a square conduit, a round jet in a circular conduit, and
a hydraulic jet in a 1- and 6-in. diameter pipe. The results showed that the
multi-fluid model better predicted the mean concentration than the single fluid
model.
The flow and mixing characteristics of three-dimensional confined
turbulent round opposing jets in a Tee mixer, using air as the working fluid
were examined numerically by Wang and Mujumdar (2007). Computational
fluid dynamics (CFD) model was validated with experimental results for a
Tee mixer in which a side stream normally impinges on a main stream. The
effects of key parameters (i.e., jet Reynolds number, dome height, jet

39
injection angle, and side-to-main pipe diameter ratio) on mixing are discussed
for this opposing jet configuration for passive mixing of fluid streams without
the use of internal flow obstructions in the pipe.
Some of the recent advances in applying CFD techniques to the
chemical process industry are documented by Shanley (1996). However, very
few studies are available for dealing with complex three-dimensional
turbulent simulation with mass transfer in venturi-jet mixer.
In addition to experimental and numerical analysis by using natural
coordinate system, the present study also employs CFD technique to elucidate
the flow and mixing characteristics on the transverse turbulent jet flow in
venturi-jet mixer with different injection angles.
Moreover the mixer performance can be predicted, enhanced, and
simulated at various conditions. The some aspects on performance of the
mixers are compared. These will also give us some idea how CFD can help
engineers to improve the mixer performance while saving operating time and
costs due to experiments, although some actual tests are still required.
1.5.11.2 Boussinesq hypothesis
Turbulence is characterized by two parameters: the kinetic
turbulence energy k and the rate of its dissipation . Transfer equations for
these functions are formulated with the use of the Boussinesq hypothesis and
its analogy. This hypothesis underlies most of the engineering calculations of
turbulent flows (Rubel 1985).
An alternative to the Boussinesq hypothesis is separate simulation
of all components of the turbulent-stress tensor, with the result that the
corresponding transfer equation is constructed and solved for each Reynolds
stress.

40
Compared to the turbulent-viscosity based models, such an
approach possesses an important advantage in that it abandons the assumption
of local isotropy, but it contains numerous empirical constants. Found for one
type of flow, they do not necessarily guarantee improvement in the accuracy
of calculation in another; a much larger volume of computations is required.
In the turbulent-viscosity-based models, unknown correlations are
simulated by averaging the flow parameters in closing the equations for
turbulent characteristics.
The Boussinesq hypothesis enables us to write the Reynolds-stress
tensor in terms of the strain-rate tensor of the averaged velocity with
introduction of the notion of a turbulent viscosity t by analogy with the
molecular viscosity lam. In this case for calculation of the turbulent
characteristics Chornyi et al. (2008) have obtained, from the Navier–Stokes
equations, the standard k model.
The turbulent transport of a vector variable, like momentum, and of
a scalar variable, like heat or a species, is not necessarily described with one
diffusion coefficient (Kok and Vander Wal 1996). The ratio of the momentum
to the scalar-diffusion coefficient is given by the turbulent Schmidt number
Sc, where 0.1 < Sc < 1.0.
1.5.11.3 The k- turbulence model
Turbulent flows are commonly encountered in practical
applications. It is the time-mean behaviour of these flows that is usually of
practical interest. The currently popular “two-equation models” of turbulence
(Launder et al. 1974) employ, as one of the equations, the equation for the
kinetic energy k of the fluctuating motion, which reads:

41
. . )k
k uk k Gt
(1.4)
wherek, is the diffusion coefficient for k, G is the rate of generation of
turbulence energy, and is the kinematic rate of dissipation. The quantity G-
is the net source term in the equation. A similar differential equation
governs the variable .
Figure 1.11 Deflected jet situation (Patenkar et al. 1977)
A turbulent jet issuing from a circular orifice that is deflected by a
stream normal to its axis induces a three-dimensional elliptic flow.
An impression of the flow pattern given by Patankar (1980) is shown in
Figure 1.11.
Patankar et a1. (1977) solved numerically the three-dimensional
flow field of the deflected jet on the basis of the k model of turbulence.
Their predictions shown in Figure 1.12 and Figure 1.13, find good agreement
between numerical prediction and experiment (Ramsey 1970, Keffer 1963,
Jordinson 1958).

42
Figure 1.12 Position of the jet centreline for different jet-to-mainstream
velocity ratios (Patankar et al. 1977)
Figure 1.13 Profiles of the z-direction velocity (Patankar et al. 1977)
In the present work the jet is not deflected by an infinitely large
cross-flow but by a cross-flow in a tube. Basically the flow field is, however,
similar to that in Patankar et al. (1980, 1977) and therefore good results for

43
the prediction of flow field and turbulent mixing are expected with the k
model of turbulence. Since Patankar et a1. (1977) also used C = 0.09 this
will most probably predict turbulent mixing of momentum correctly.
1.5.11.4 Definition of turbulence intensity
The turbulence intensity, also often referred to as turbulence level,
is defined as:
'u
IU
(1.5)
where u’ is the root-mean-square of the turbulent velocity fluctuations and U
is the mean velocity (Reynolds averaged). If the turbulent energy,k, is known
can be computed as:
2 2 2' ' ' '1 2
3 3x y z
u u u u k (1.6)
U can be computed from the three mean velocity components Ux, Uy and Uz
as:
2 2 2
x y zU U U U (1.7)
When setting boundary conditions for a CFD simulation it is often necessary
to estimate the turbulence intensity on the inlets. To do this accurately it is
good to have some form of measurements or previous experience to base the
estimate on.

44
Here are a few examples of common estimations of the incoming
turbulence intensity:
High-turbulence case
High-speed flow inside complex geometries like heat-exchangers
and flow inside rotating machinery (turbines and compressors). Typically the
turbulence intensity is between 5% and 20%.
Medium-turbulence case
Flow in not-so-complex devices like large pipes, ventilation flows
etc. or low speed flows (low Reynolds number). Typically the turbulence
intensity is between 1% and 5%.
Low-turbulence case
Flow originating from a fluid that stands still, like external flow
across cars, submarines and aircrafts. Very high-quality wind-tunnels can also
reach really low turbulence levels. Typically the turbulence intensity is very
low, well below 1%.
1.5.11.5 Energy spectrum of turbulent boundary layer
Figure 1.14 gives information about the mean-energy of the
turbulent structures which have the same dimensions. The energetic structures
can be split in the following ranges:
energy-containing range, which contains the largest vortical
turbulent structures
inertial range or sub range, which contains vortices of
intermediate dimensions
dissipation range, which contains the smallest structures.

45
Figure 1.14 Typical energy spectrum of a turbulent boundary layer
To estimate the characteristic time and the characteristic
dimensions of turbulence, the results of the Universal Equilibrium Theory of
Kolmogorov can be used (Kolmogorov). The spatial orders of magnitude of
the largest scales, L, and of the smallest scale in the flow, lk, are related as
follows:
34Re
k
L
l (1.8)
where Re = uL/ is the Reynolds number of the flow, based on L and on an
integral velocity u, which can be assumed similar to the velocity of the largest
scales. It can be seen that the separation between large and small scales
increases with the Reynolds number.
The largest scales of turbulence carry most of the turbulence kinetic
energy so they are responsible of the turbulent transport. The smallest scales
are responsible of most of the dissipation of kinetic energy, so even if their
contribution to the kinetic energy is negligible in comparison with the largest
scales they must be considered to obtain accurate results.

46
1.5.11.6 Fluent solver package
CFD is a tool that uses numerical methods to solve partial
differential equations like Navier Stokes equations and Fick’s Law. In the
present work, CFD is also used to study the JICF and the mass transfer
phenomena generated by the JICF.
Most of the commercial CFD codes (like Fluent), and open-source
codes for multipurpose and complex physics (like Openfoam), are developed
in C and C++. FLUENT is a state-of-the-art computer program for modelling
fluid flow and heat transfer in complex geometries.
FLUENT is written in the C computer language and makes full use
of the flexibility and power offered by the language. Consequently, true
dynamic memory allocation, efficient data structures, and flexible solver
control are all made possible.
FLUENT provides complete mesh flexibility, solving the flow
problems with unstructured meshes that can be generated about complex
geometries with relative ease. Supported mesh types include 2D
triangular/quadrilateral, 3D tetrahedral/hexahedral/pyramid/wedge, and mixed
(hybrid) meshes.
FLUENT also allows refining or coarsening the grid based on the
flow solution. This solution-adaptive grid capability is particularly useful for
accurately predicting flow fields in regions with large gradients, such as free
shear layers and boundary layers.
In comparison to solutions on structured or block structured grids,
this feature significantly reduces the time required to generate a "good" grid.
Solution-adaptive refinement makes it easier to perform grid refinement
47
studies and reduces the computational effort required to achieve a desired
level of accuracy, since mesh refinement is limited to those regions where
greater mesh resolution is needed.
The Navier-Stokes equations are no linear differential equation and
as we have seen, we can solve them numerically using FVM. One of the
issues that have to be faced when the Navier-Stokes equations have to be
solved is the fact that they are equations coupled through them by mean of
variables like velocity, density and pressure and they have to be solved in a
certain order (Salvatore, 2009).
The choice of the algorithm that defines the order in which the
Navier-Stokes equations are solved is a key element in a CFD simulation, and
in the commercial code Fluent there are 2 major numerical solvers; namely,
Segregated solver and Coupled solver – Implicit and Explicit.
Segregated solver
The governing equations are nonlinear and coupled; each governing
equation has to be solved iteratively. Fluent solves the set of equations
sequentially (segregated from the others) or using a coupled system of
equations comprising momentum equations and the pressure based continuity
equation. For this segregated solver was used.
Figure 1.15 gives an overview of the segregated solution method in
the following steps (Aryoso 2007).
1. Fluid properties are updated, based on the current solution.
2. The u, v, and w momentum equations are each solved in turn
using current values for pressure face mass fluxes, in order to
update the velocity field.

48
Figure 1.15 Overview of the segregated solver
3. Since the velocities obtained in step 2 may not satisfy the
continuity equation locally, “Poisson – type” equation for the
pressure correction is derived from the continuity equation
and the linearized momentum equations. This pressure
correction equation is then solved to obtain the necessary
correction to the pressure and velocity fields and the face
mass fluxes such that the continuity is satisfied.
4. Where appropriate, equations for scalars such as turbulence,
energy, species and radiation are solved using the previously
updated values of the other variable.
5. When interphase coupling is to be included, the source terms
in the appropriate continuous phase equations may be updated
with a discrete phase trajectory calculation.
Update properties
Solve momentum equations
Solve energy, species, turbulence and other scalar
equations
Solve pressure corrections (continuity equation.
Update pressure, face mass flow rate
Converged
Stop

49
6. A check for the convergence of the equation set is made.
The iterative process is continued until the convergence criteria are
met.
Coupled solver
The coupled solver solves the governing equations of continuity,
momentum and energy (where appropriate) and species transport
simultaneously (i.e., coupled together). Governing equations for additional
scalar will be solved sequentially (i.e., segregated from one another and from
the coupled set) using the procedure described for the segregated solver above
because the equations are non-linear (and coupled), several iterations of the
solution loop must be performed before a converged solution is obtained.
1.5.11.7 Finite volume method
There are three distinct streams of numerical solution techniques
able to discretize partial differential equation like Navier Stokes equations:
Finite difference method (FDM)
Finite element method (FEM)
Finite volume method (FVM)
All the aforementioned methods can be used to solve numerically
partial differential equations successfully, but according to the complexity of
the phenomena, the importance of coherently describe the conservation laws
evocated by the equation itself and the computational capability available, is
better to implement one method or another.
In the case of fluids the equation to be solved are the Navier Stokes
equations, and the methods that more coherently maintains the conservation

50
of all variable is the FVM. That’s why most of the CFD codes are based on
FVM.
The conservative form of all fluid flow equations, including
equations for scalar quantities ( ) such as temperature and concentration etc.,
can usefully be written in the form:
. u St
(1.9)
The steady conservation equation in integral form to discretize the
governing equations by finite volume method for transport of a scalar quantity
in a control volume V from Equation (1.9) is written as:
. V
u dA S dV (1.10)
where = density,
u = velocity vector
A = surface area vector
= diffusion coefficient for
= gradient of
S = source term of per unit volume
The space discretization of the Equation (1.10) for a steady flow
problem on a given cell can be done with:
.f f f f fu A S V (1.11)
A linearized discretized transport equation for the scalar quantity
can be written using the following formulation:
51
p nb nb
nb
a a b (1.12)
where the subscript nb refers to neighbours cells, and aP and anb are the
linearized coefficient for and nb. To solve the linear system obtained
combining Equation (1.11) to Equation (1.12) for each cell of the
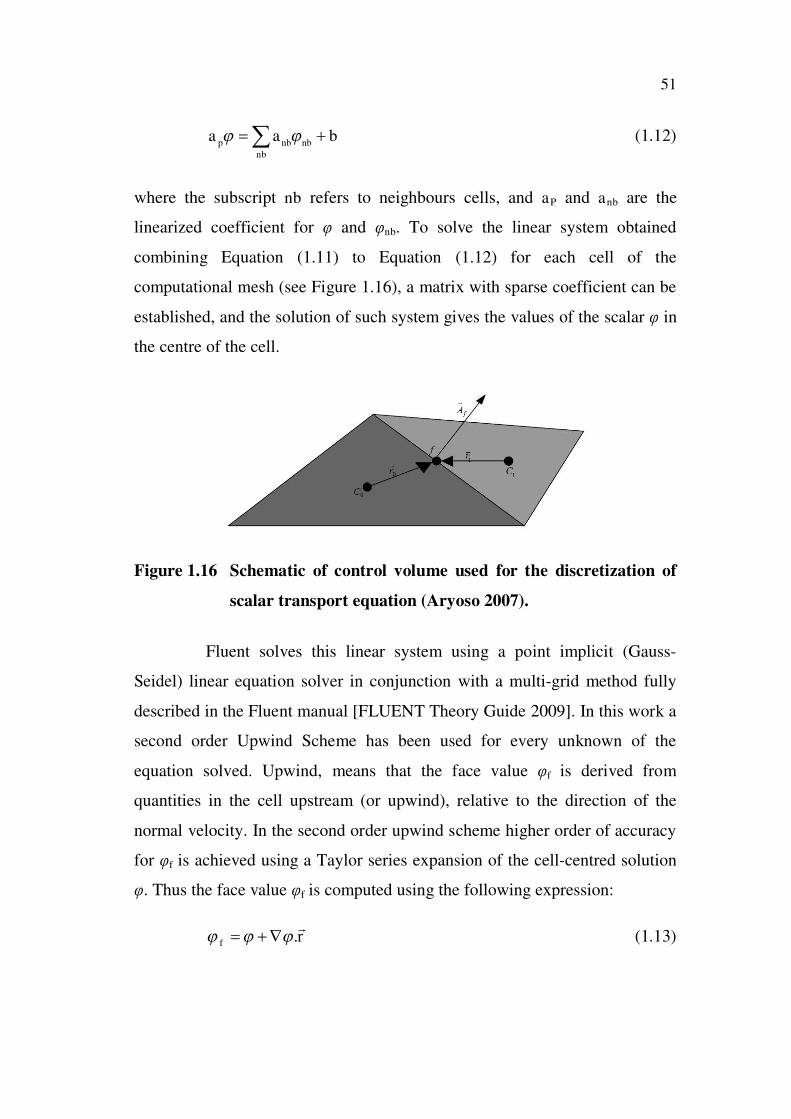
computational mesh (see Figure 1.16), a matrix with sparse coefficient can be
established, and the solution of such system gives the values of the scalar in
the centre of the cell.
Figure 1.16 Schematic of control volume used for the discretization of
scalar transport equation (Aryoso 2007).
Fluent solves this linear system using a point implicit (Gauss-
Seidel) linear equation solver in conjunction with a multi-grid method fully
described in the Fluent manual [FLUENT Theory Guide 2009]. In this work a
second order Upwind Scheme has been used for every unknown of the
equation solved. Upwind, means that the face value f is derived from
quantities in the cell upstream (or upwind), relative to the direction of the
normal velocity. In the second order upwind scheme higher order of accuracy
for f is achieved using a Taylor series expansion of the cell-centred solution
. Thus the face value f is computed using the following expression:
.f
r (1.13)

52
The Green Gauss cell-based formulation of gradient is obtained
from the arithmetic average of the values at neighbours’ cell centres:
2
o oc c
f (1.14)
The Green-Gauss cell-based formulation is obtained from the
arithmetic average of the all nodal values Nf on the face.
1 fN
f n
nN (1.15)
where nodal value n is obtained from the weighted average of the cell values
surrounding the nodes. This method proposed by Holmes and Connel
[FLUENT Theory Guide, 2009] reconstruct exact values of a linear function
at a node from surrounding cell centred values on arbitrary unstructured
meshes by solving a constrained minimization problem, preserving a second
order spatial accuracy. For the present study, the Green Gauss node based
method used for accuracy, even in highly skewed cells, even those is
computationally more expensive than the cell based gradient scheme.