chapter 1 stepper motor control - purdue engineeringwasynczu/ee423n/step_motor_control.pdf ·...
TRANSCRIPT

CHAPTER 1 Stepper Motor Control
1.1 PULLOUT TORQUEStepper motors are desirable in that they are readily interfaced
with digital circuitry and do not require any position sensors or feed-back control system to achieve position control. Instead, it is assumedthat the motor takes exactly one step per step command. However, iftoo large a load torque is applied, or if the stepping rate is set too highor changed too fast, the motor can ‘lose step’ whereupon future behav-ior will be unpredictable. During the design stage, it is necessary to en-sure that this does not occur. This requires knowledge of how muchtorque can be produced by a stepper motor at any given stepping rate(speed). This torque, known as the pullout torque, is dependent uponthe type of drive circuit used. Typically, the drive can be classified aseither current controlled or voltage controlled.
Current Controlled DrivesSuppose we have an excitation sequence of ,
The idealized winding currents in a current controlled drive
ias ibs ias–, ,
ibs– …,
Class notes for EE423, © O. Wasynczuk,1998 1

Stepper Motor Control
2
will be square waves as shown in Fig. 1.1-1. Let us denote
= stepping rate (steps/sec)
= period of one step
= fundamental frequency of winding currents
For two-phase device ,
(1.1-1)
The fundamental component of the stator currents may be expressedas
(1.1-2)
t
ias
ibs
Ts
t = 0FIGURE 1.1-1. Idealized winding currents for constant stepping rate with current-controlled drive.
fs
Ts 1 fs⁄=
ωe
N 2=
ωe2π4Ts--------- 2π
4------fs
πfs2
-------= = =
ias 1, 2Is θesicos=
Class notes for EE423, © O. Wasynczuk,1998

(1.1-3)
where, in general,
(1.1-4)
Here, is the frequency of the currents and is the instantaneousangle or “position” of the stator currents. Transforming the fundamen-tal components of and into the rotor reference frame using(8.8-1) of EE321 text,
(1.1-5)
where the carrot symbol is used to denote the fact that only the fun-damental components of the stator currents are considered. The higer-order harmonic components can also produce torque; however, theelectromagnetic torque produced by the higer-order harmonics will, ingeneral, be smaller than that produced by the fundmaental compo-nents. Therefore, they will be neglected in this analysis. Using (8.8-18) of EE321 text,
(1.1-6)
where
(1.1-7)
For steady-state operation at a constant stepping rate,(1.1-8)
(1.1-9)
ibs 1, 2Is θesisin=
θesi ωe ξ( ) ξd0
t∫ θesi 0( )+=
ωe θesi
ias ibs
iqsr ias 1, RTθrm( )sin– ibs 1, RTθrm( )cos+
2Is θesi RTθrm–( )sin
=
=
Te RTλm′ 2Is θesi RTθrm–( )sin
RTλm′ 2Is RT θrm
θesiRT---------–
sin–
=
=
θrm ωrm ξ( ) ξd0
t∫ θrm 0( )+=
θesi ωet θesi 0( )+=
θrm ωrmt θrm 0( )+=
Class notes for EE423, © O. Wasynczuk,1998 3

Stepper Motor Control
4
whereupon (1.1-6) becomes
(1.1-10)
For all speeds except , the temporal average (aver-
age with respect to time) of will be zero (since is a sinusoidalfunction of time) and, if the load torque is nonzero, the motor cannotoperate steadily at a constant speed. The only speed at which the motorcan produce a nonzero average torque is denote as the synchronousspeed,
(1.1-11)
At synchronous speed, (1.1-10) becomes
(1.1-12)
The maximum torque that can be developed at synchronous speed is
(1.1-13)
which is the pullout torque for ideal current-controlled drives. It is in-teresting to note that this pullout torque is independent of the steppingrate.
Dynamic response due to change in load torqueIt is possible to express (1.1-10) in terms of the pullout torque
as(1.1-14)
Te RTλm′ 2Is RT ωrm
ωeRT--------–
t θrm 0( )θesi 0( )
RT-----------------–+sin–=
ωrm ωe RT( )⁄=
Te Te
ωrm sync,ωeRT--------
2πfs2N RT( )---------------------- SL( )fs
=
= =
Te RTλm′ 2Is RT θrm 0( )
θesi 0( )RT
-----------------– sin–=
Te(po) RTλm' 2Is=
Te Te po( ) RTδri( )sin–=
Class notes for EE423, © O. Wasynczuk,1998

where
(1.1-15)
Suppose is constant, , and . Since
, the integrand of (1.1-15) is zero. Thus, is con-
stant in the steady state. What is equilibrium value of ? Well, it's
whatever it has to be so that . From Fig. 1.1-2, the sta-
ble equilibrium is .
Now suppose that at , is stepped from zero to some positive
value less than . Since can't change instantaneously ( is
related to the rotor position which cannot change instantaneously),
δri θrmθesiRT---------–
ωrmωeRT--------–
τd0
t∫ θrm 0( )
θesi 0( )RT
-----------------–+
=
=
ωe TL 0= ωrm ωe RT( )⁄=
ωrm ωe RT( )⁄= δri
δri
Te TL 0= =
δri 0=
Stable equilibrium
T e (po)
TP /2δ ri
−TP /2
Te
FIGURE 1.1-2. Torque versus , zero load torque.δri
δri θrmθesiRT---------–
ωrmωeRT--------–
τd0
t∫ θrm 0( )
θesi 0( )RT
-----------------–+
=
=
t 0= TL
Te po( ) δri δri
Te
Class notes for EE423, © O. Wasynczuk,1998 5
Stepper Motor Control
6
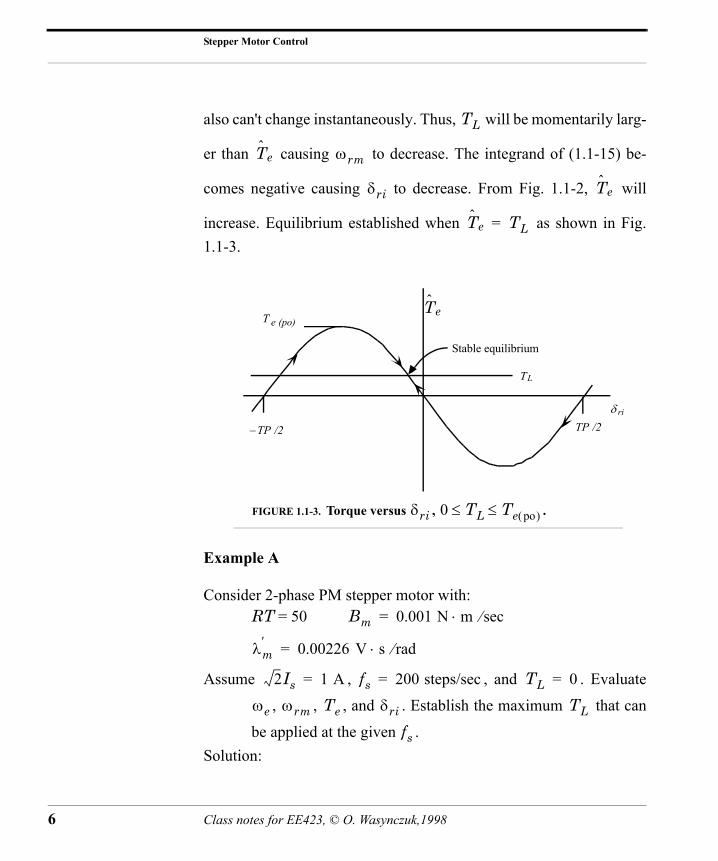
also can't change instantaneously. Thus, will be momentarily larg-
er than causing to decrease. The integrand of (1.1-15) be-
comes negative causing to decrease. From Fig. 1.1-2, will
increase. Equilibrium established when as shown in Fig.1.1-3.
Example A
Consider 2-phase PM stepper motor with:RT = 50
Assume , , and . Evaluate
, , , and . Establish the maximum that can
be applied at the given .Solution:
TL
Te ωrm
δri Te
Te TL=
−TP /2 TP /2δ ri
Stable equilibrium
TL
T e (po)Te
FIGURE 1.1-3. Torque versus , .δri 0 TL Te po( )≤ ≤
Bm 0.001 N m⋅ sec⁄=
λm′ 0.00226 V s⋅ rad⁄=
2Is 1 A= fs 200 steps/sec= TL 0=
ωe ωrm Te δri TL
fs
Class notes for EE423, © O. Wasynczuk,1998

(A.1)
(A.2)
(A.3)
In the steady state,
= 0 + (0.001)(6.28) = 0.00628 N⋅m (A.4)
(A.5)
⇒
Now and . Thus,
the maximum that can be applied is
for the given .
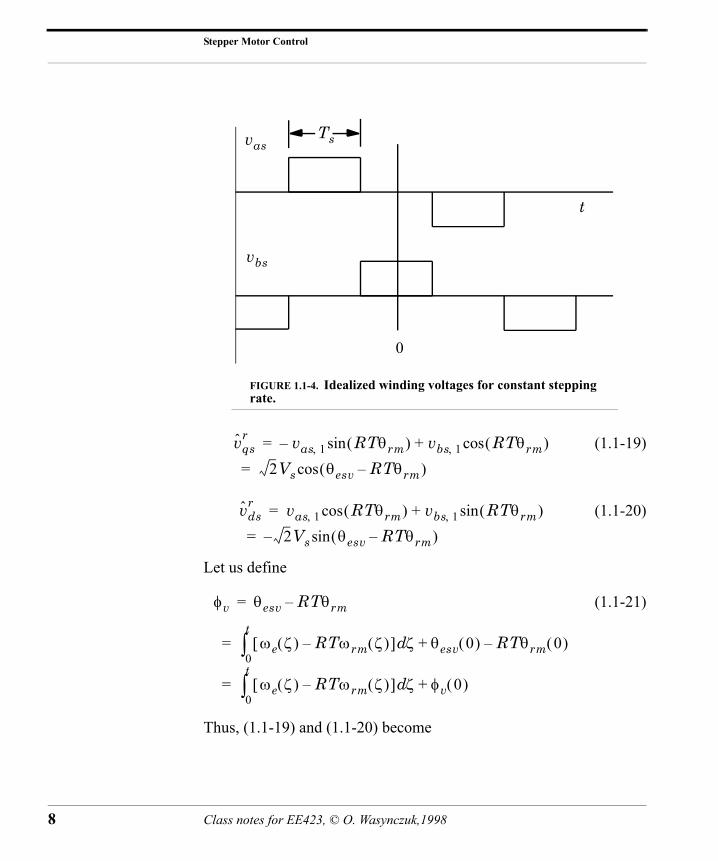
Voltage Controlled DrivesIn an ideal voltage controlled drive, the winding voltages will
be ideal square waves as shown in Fig. 1.1-4. Neglecting harmonics, (1.1-16)
(1.1-17)
where
(1.1-18)
Transforming into the rotor reference frame,
SL 180o
RT( )N------------------- 180o
50( )2-------------- 1.8o= = =
ωeπfs2
------- 3.14( ) 200( )2
----------------------------- 314 rad/sec= = =
ωrmωeRT-------- 314
50--------- 6.28 rad/sec= = =
Te TL Bmωrm+=
Te RTλm′ 2Is RTδri( )sin–
0.113 50δri( )sin– 0.00628 N m⋅
== =
δri 3.2o=
Te po( ) 0.113 N m⋅= Bmωrm 0.00628 N m⋅=
TL 0.113 0.00628– =
0.107 N m⋅ fs
vas 1, 2Vs θesvsin–=
vbs 1, 2Vs θesvcos=
θesv ωe ξ( ) ξd0
t∫ θesv 0( )+=
Class notes for EE423, © O. Wasynczuk,1998 7
Stepper Motor Control
8
(1.1-19)
(1.1-20)
Let us define
(1.1-21)
Thus, (1.1-19) and (1.1-20) become
vas
vbs
Ts
t
0
FIGURE 1.1-4. Idealized winding voltages for constant stepping rate.
vqsr vas 1, RTθrm( )sin– vbs 1, RTθrm( )cos+
2Vs θesv RTθrm–( )cos=
=
vdsr vas 1, RTθrm( )cos vbs 1, RTθrm( )sin+
2Vs θesv RTθrm–( )sin–=
=
φv θesv RTθrm–
ωe ζ( ) RTωrm ζ( )–[ ] ζd0
t∫ θesv 0( ) RTθrm 0( )–+
ωe ζ( ) RTωrm ζ( )–[ ] ζd0
t∫ φv 0( )+
=
=
=
Class notes for EE423, © O. Wasynczuk,1998

(1.1-22)
(1.1-23)
These are the same relations as for a brushless dc motor; however, un-like a brushless dc motor, is not under our direct control. What then
determines ? Suppose, for example, that we have a stepper motorwith
RT = 50
Let us determine and the maximum that can be applied.
(1.1-24)
(1.1-25)
With reference to (7.6-9) of EE321 text, (with P/2 replaced by RT and
by
(1.1-26)
vqsr 2Vs φvcos=
vdsr 2Vs φvsin–=
φv
φv
rs 10 Ω=
λm′ 0.00226 V s⋅ rad⁄= Lss 1.1 mH=
fs 300 steps/sec= TL 0=
Vs 10 V(rms)=
φv TL
ωeπfs2
------- 3.14( ) 300( )2
----------------------------- 471 rad/sec= = =
ωrmωeRT-------- 471
50--------- 9.42 rad/sec= = =
ωr RTωrm
Te RTλm
′ rs
rs2 RTωrm( )2Lss
2+------------------------------------------------ Vqs
r RTωrmLssrs
-----------------------------Vdsr– RTωrmλm
′–=
Class notes for EE423, © O. Wasynczuk,1998 9

Stepper Motor Control
10
(1.1-27)
Equation (1.1-27) is plotted in Fig. 1.1-5. Now, since ,
⇒
(from figure, choose for stable operating point)
Te 50 0.00226( )10
102 50 9.42×( )2 1.1 10 3–×( )2
+----------------------------------------------------------------------------- 14.14 φvcos
50( ) 9.42( ) 1.1 10 3–×( )10
--------------------------------------------------------14.14 φvsin 50 9.42( ) 0.00226( )– –
0.0113 14.14 φvcos 0.773 φvsin– 1.06–[ ]
0.012– 0.16 φv 3°–( )cos+
=
=
=
TL 0=
Te
φv
unstable equilibrium
stable equilibrium
3°
0.148
−0.172
FIGURE 1.1-5. versus at stepping rate of 300 steps/sec.
.
Te φv
T L = 0
φv ωe ζ( ) RTωrm ζ( )–[ ] ζd0
t∫ φv 0( )+=
Te 0 0.012– 0.16 φv 3°–( )cos+= =
φv 85.7° or 88.7°–=
85.7°–
Class notes for EE423, © O. Wasynczuk,1998

Dynamic response due to change in load torqueSuppose that load torque is stepped to some positive value less
than the maximum shown in Fig. 1.1-5. Since can't change instan-
taneously, will be momentarily greater than . Thus, willdecrease whereby the integrand of (1.1-21) becomes positive. As a re-sult, will increase. The new stable equilibrium point is shown inFig. 1.1-6.
From Fig. 1.1-6, the maximum load torque (including friction)that can be applied at this stepping rate (i.e., the pullout torque) is0.148 N⋅m. The pullout torque may also be established by substituting(1.1-22) and (1.1-23) into (1.1-26), differentiating with respect to ,
setting the result to zero, and solving for . This gives formulas sim-ilar to (7.6-34) and (7.6-35) of the EE321 text, i.e.
(1.1-28)
and
φv
TL Te ωrm
φv
Te
φv
unstable
new equilibrium
3°
0.148
−0.172
TL
FIGURE 1.1-6. versus at stepping rate of 300 steps/sec.
. T e φ v
0 ≤ T L = T e(po )
φv
φv
φv po( ) tan 1– RTωrmτs( )=
Class notes for EE423, © O. Wasynczuk,1998 11
Stepper Motor Control
12
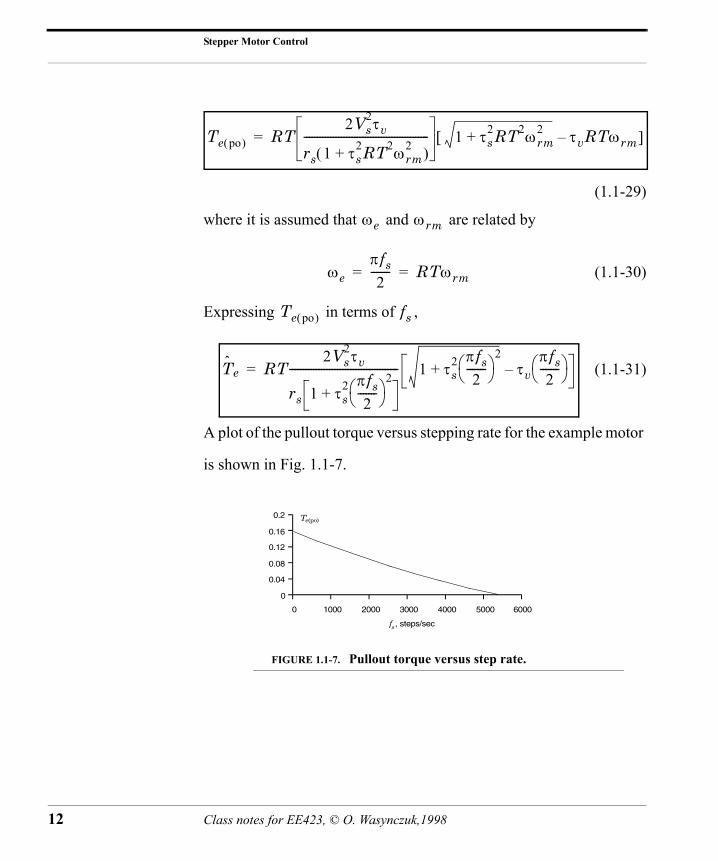
(1.1-29)
where it is assumed that and are related by
(1.1-30)
Expressing in terms of ,
(1.1-31)
A plot of the pullout torque versus stepping rate for the example motor
is shown in Fig. 1.1-7.
Te po( ) RT2Vs
2τv
rs 1 τs2RT2ωrm
2+( )----------------------------------------------- 1 τs
2RT2ωrm2+ τvRTωrm–[ ]=
ωe ωrm
ωeπfs2
------- RTωrm= =
Te po( ) fs
Te RT2Vs
2τv
rs 1 τs2 πfs
2-------
2
+----------------------------------------- 1 τs
2 πfs2
-------
2+ τv
πfs2
------- –=
Te(po)
fs
FIGURE 1.1-7. Pullout torque versus step rate.
Class notes for EE423, © O. Wasynczuk,1998

1.2 CONTROL OF PM STEPPER MOTORS
There are two types of stepper motor control systems that we willconsider: fixed and variable rate. The fixed rate control is easier toimplement; however, higher stepping rates can be achived if the step-ping rate is varied.
Fixed stepping rate controlA block diagram of a fixed rate stepper motor control system
is shown in Fig. 1.2-1. Therein, the number of steps to be taken is as-sumed to be known and enterred into an up/down counter that countsthe number of steps to be taken. The excitation sequence generatorsupplies proper excitation to the appropriate stator winding followingeach output clock pulse. In this control, the stepping rate is either zeroor a constant value. The only question we have to answer is: what isthe maximum fixed rate that we can set so that we can be sure thatthere will be no missed steps? This is called the maximum startingrate.
Clock
DownCounter
ExcitationSequenceGenerator
CkStart
-as
+bs
-bs
DriveCircuit
DriveCircuit
start stop
fs
as
vas
ias
ibs
vbs
+
-
+
-
# of steps
# steps
FIGURE 1.2-1. Constant stepping rate open-loop control system.
Class notes for EE423, © O. Wasynczuk,1998 13

Stepper Motor Control
14
Usually, the starting rate is quite small so that the “back emf”can be neglected whereupon the dynamic equations for phase a maybe expressed
(1.2-1)
The current following a step command resembles that shown in Fig.1.2-2. If, furthermore, , then it is reasonable to neglect .The response then resembles a squre wave as shown in Fig. 1.2-3.
Thus, we can use the static versus characteristics to
vas rs Lssp+( )ias λm′ RTωrm RTθrm( )cos+
rs Lssp+( )ias≈
=
Ts τa» τa
FIGURE 1.2-2. Electrical response for single step,
. λ m' RT ω rm << vas
Vsvas
iasVsrs------
Ts
FIGURE 1.2-3. Electrical response for single step, and .λm
′ RT( )ωrm Vs« Ts τs»
Vsrs------
Vsvas
ias
Ts
Te θrm
Class notes for EE423, © O. Wasynczuk,1998
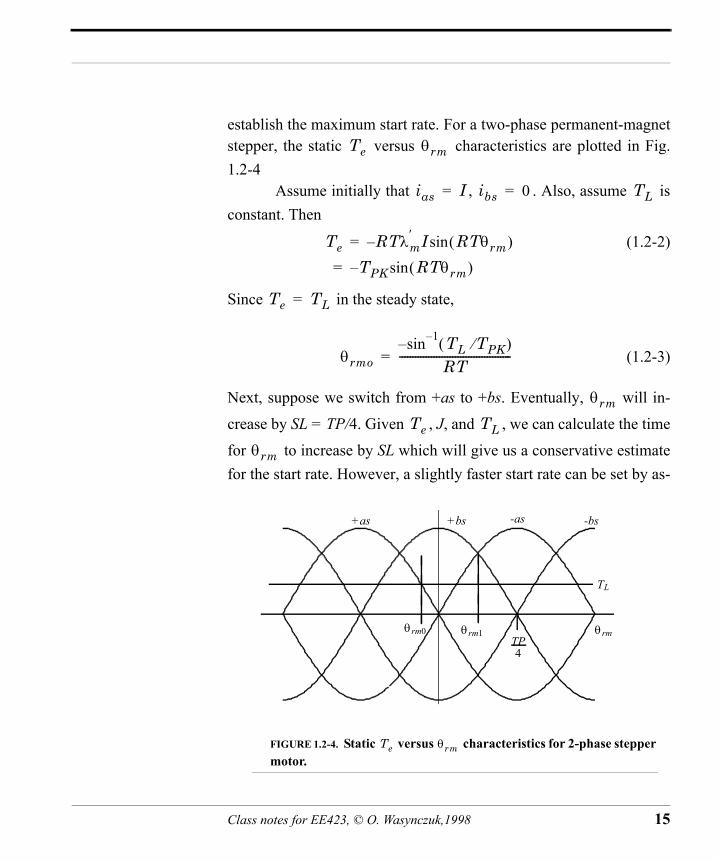
establish the maximum start rate. For a two-phase permanent-magnetstepper, the static versus characteristics are plotted in Fig.1.2-4
Assume initially that , . Also, assume isconstant. Then
(1.2-2)
Since in the steady state,
(1.2-3)
Next, suppose we switch from +as to +bs. Eventually, will in-
crease by SL = TP/4. Given , J, and , we can calculate the time
for to increase by SL which will give us a conservative estimatefor the start rate. However, a slightly faster start rate can be set by as-
Te θrm
+as +bs -bs-as
θrm0 θrm1 θrm
TL
TP4
FIGURE 1.2-4. Static versus characteristics for 2-phase stepper motor.
Te θrm
ias I= ibs 0= TL
Te RTλm′ I RTθrm( )sin–
TPK RTθrm( )sin–=
=
Te TL=
θrmosin 1– TL TPK⁄( )–
RT------------------------------------------=
θrm
Te TL
θrm
Class notes for EE423, © O. Wasynczuk,1998 15

Stepper Motor Control
16
suming that next step initiated at the crossover angle, . To esti-
mate the time needed to reach , we first calculate the average
torque during the interval from to .
(1.2-4)
Note from Fig. 1.2-4 that . Thus, .
Now, the time needed to reach may be approximated as follows:
(1.2-5)
(1.2-6)
(1.2-7)
(1.2-8)
From which
(1.2-9)
(1.2-10)
where is given by (1.2-4)
θrm1
θrm1
θrm0 θrm1
Te TM1
θrm1 θrm0–------------------------------ TPK RTθrm( )cos θrmd
θrm0
θrm1
∫TPK
RT θrm1 θrm0–( )-------------------------------------------- RTθrm1( )sin RTθrm0( )sin–[ ]
= =
=
θrm1 TP( ) 8⁄= RTθrm1 π 4⁄=
θrm1
d2θrm
dt2---------------- 1
J--- TM TL–( )=
d θ rmdt
=1J
(T M − T L ) t +d θ rm
dt t =0
θ rm =
12 J
(T M − T L ) t2 + θ rm 0
θ rm 1 =
12 J
(T M − T L )T s + θ rm 0
Tsθrm1 θrm0–( )2J
TM TL–------------------------------------------=
fsTM TL–
θrm1 θrm0–( )2J------------------------------------------=
TM
Class notes for EE423, © O. Wasynczuk,1998

Variable Stepping Rate ControlIn general, a much larger stepping rate can be achieved by
slowly increasing stepping rate to some maximum value and slowlydecreasing it as the target position is approached as shown in Fig. 1.2-5.
In this control strategy, we need to determine:(1) the maximum stepping rate [pullout rate, ](2) the acceleration profile(3) the deceleration profile
In all three cases, we need versus stepping rate characteristic.
If we have a voltage source drive, is given by (1.1-29) or (1.1-31) and plotted in Fig. 1.1-7 for the example machine. If we have acurrent source drive, is given by (1.1-13) and is independent ofstepping rate. In practice, however, constant current cannot be main-tained at large step rates.We typically get something that looks like theplot shown in Fig. 1.2-7. For smaller stepping rates, the pullout torqueis constant. As the stepping rate increases, the back emf increases andthe actual currents may no longer track the desired currents. For veryhigh speeds, the current control degenerates to a voltage control
fs acceleration profile
deceleration profile
constant speed
time
fs (po)
A A = # of steps
FIGURE 1.2-5. Stepping rate versus time.
fs po( )
Te po( )
Te po( )
Te po( )
Class notes for EE423, © O. Wasynczuk,1998 17

Stepper Motor Control
18
whereupon the pullout torque assymptotically approaches that of avoltage controlled drive. We will find it convenient analytically to ap-proximate the pullout torque versus stepping rate characteristics astwo straigh-line segments, one of which is horizontal.
The maximum stepping rate taht can be achieved is known asthe pullout rate, , which is the intersection of versus
and versus characteristics. To determine acceleration profile,consider mechanical equation
(1.2-11)
For maximum acceleration, assume . Also, assume nomissed steps whereupon
(1.2-12)
Thus
(1.2-13)
0
0.04
0.08
0.12
0.16
0.2
0 1000 2000 3000 4000 5000 6000
TL
Te(po)
f s , steps/sec
fs(po)voltage sou rce
cu rrent sou rce
FIGURE 1.2-6. Extended versus characteristics for current source drive including constraints.
T e(po ) θ rm
fs po( ) Te po( ) fs
TL fs
T e − T L = Jp ω rm
T e = T e(po )
ω rm = SLf s
Te po( ) TL– J SL( )dfsdt--------=
Class notes for EE423, © O. Wasynczuk,1998
(1.2-14)
Integrating,
(1.2-15)
Dropping subscript 1, the time needed to reach constant stepping rate
of is
(1.2-16)
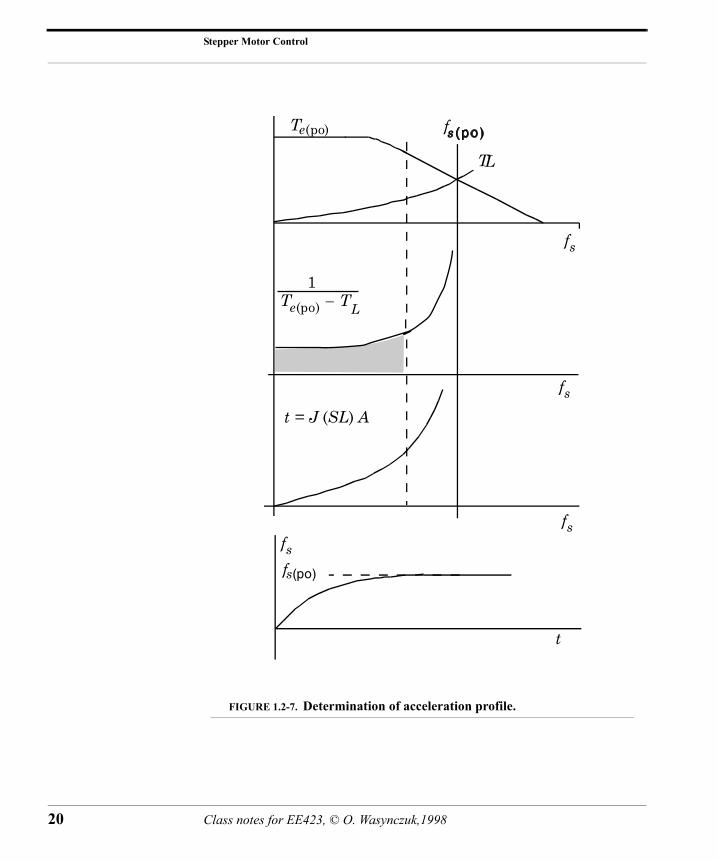
This integral may be integrated graphically or numerically. The se-quence of steps necessary to establish acceleration profile is shown inFig. 1.2-7.
Analytical expressions for the acceleration profile can be de-rived if we can assume is constant and use idealized versus
characteristics shown in Fig. 1.2-8. Let t = time to reach
.
(1.2-17)
(1.2-18)
This implies that we should increase linearly for .
Now let t = time to reach .
dt J SL( ) 1Te po( ) TL–---------------------------- fsd=
t1 td0
t1
∫ J SL( ) 1Te po( ) TL–---------------------------- fsd
0
fs1
∫= =
fs
t J SL( ) 1Te po( ) TL–---------------------------- fsd
0
fs
∫=
TL Te po( )
fs
f s < f s ,bp
t J SL( ) 1Te po( ) TL–---------------------------- fsd
0
fs
∫
SL( )JKfs
=
=
fs1
SL( )JK----------------------t=
fs 0 < f s < f s ,bp
f s ,bp < f s < f s , po
Class notes for EE423, © O. Wasynczuk,1998 19
Stepper Motor Control
20
TL
Te(po) fs
1Te(po) − TL
A
t = J (SL) A
fs
t
fs
fs
fs
fs
FIGURE 1.2-7. Determination of acceleration profile.
Class notes for EE423, © O. Wasynczuk,1998

(1.2-19)
TL
fs(po)
fs
1Te(po) - TL
A
fs
fs(bp)
K
Te(po) = C Te(po) = b - a fs
FIGURE 1.2-8. Approximate determination of acceleration profile.
t SL( )J 1Te po( ) TL–---------------------------- fsd
0
fs
∫
SL( )J K fsd0
fs bp,
∫ SL( )J 1b afs– TL–------------------------------ fsd
fs bp,
fs
∫+
tbp SL( )J 1B Afs–------------------- fsd
fs bp,
fs
∫+
tbp SL( )J 1A---- B Afs–( )ln– SL( )J 1
A---- B Afs bp,–( )ln+
=
=
=
=
Class notes for EE423, © O. Wasynczuk,1998 21

Stepper Motor Control
22
where
(1.2-20)
is the time it takes to increase from 0 to . The approximateoptimum acceleration profile is sketched in Fig. 1.2-9.
tbp SL( )J K fsd0
fs bp,
∫ SL( )JKfs bp,= =
f s f s,bp
linear
exponential
tbp
t
fs,bp
fs,po
fs
FIGURE 1.2-9. Approximate acceleration profile.
Class notes for EE423, © O. Wasynczuk,1998