chapter 2: business efficiency lesson plan business efficiency visiting vertices-graph theory...
TRANSCRIPT
Chapter 2: Business EfficiencyLesson Plan Business Efficiency
Visiting Vertices-Graph Theory Problem
Hamiltonian Circuits Vacation Planning Problem
Minimum Cost-Hamiltonian Circuit Method of Trees
Fundamental Principle of Counting
Traveling Salesman Problem Helping Traveling Salesman
Nearest Neighbor and Sorted Edges Algorithms Minimum-Cost Spanning Trees
Kruskal’s Algorithm
Critical-Path Analysis
1
Mathematical Literacy in Today’s World, 7th
ed.
For All Practical Purposes
© 2006, W.H. Freeman and Company
Chapter 2: Business EfficiencyBusiness Efficiency
Visiting Vertices In some graph theory problems, it is only necessary to visit
specific locations (using the travel routes, or streets available). Problem: Find an efficient route along distinct edges of a graph
that visits each vertex only once in a simple circuit.
2
Applications: Salesman visiting
particular cities Inspecting traffic
signals Delivering mail to
drop-off boxes Pharmaceutical
representative visiting doctors
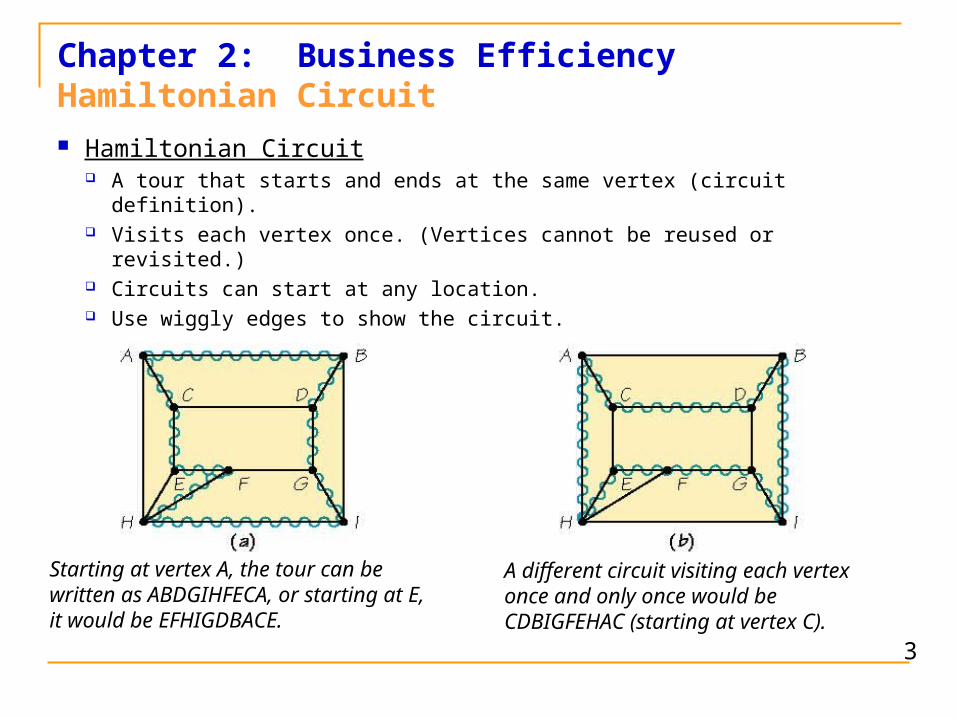
Hamiltonian Circuit A tour that starts and ends at the same vertex (circuit definition). Visits each vertex once. (Vertices cannot be reused or revisited.) Circuits can start at any location. Use wiggly edges to show the circuit.
3
Starting at vertex A, the tour can be written as ABDGIHFECA, or starting at E, it would be EFHIGDBACE.
Chapter 2: Business EfficiencyHamiltonian Circuit
A different circuit visiting each vertex once and only once would be CDBIGFEHAC (starting at vertex C).
Hamiltonian vs. Euler Circuits Similarities
Both forbid re-use. Hamiltonian do not reuse vertices. Euler do not reuse edges.
Differences Hamiltonian is a circuit of vertices. Euler is a circuit of edges. Euler graphs are easy to spot
(connectedness and even valence). Hamiltonian circuits are NOT as easy
to determine upon inspection. Some certain family of graphs can be
known to have or not have Hamiltonian circuits. (Km,n , m>n, is an infinite family of graphs that have no Hamiltonian circuits.)
4
Chapter 2: Business EfficiencyHamiltonian Circuit vs. Euler Circuits
Hamiltonian circuit – A tour (showed by wiggly edges) that starts at a vertex of a graph and visits each vertex once and only once, returning to where it started.
Euler circuit – A circuit that traverses each edge of a graph exactly once and starts and stops at the same point.
Chapter 2: Business EfficiencyHamiltonian Circuits
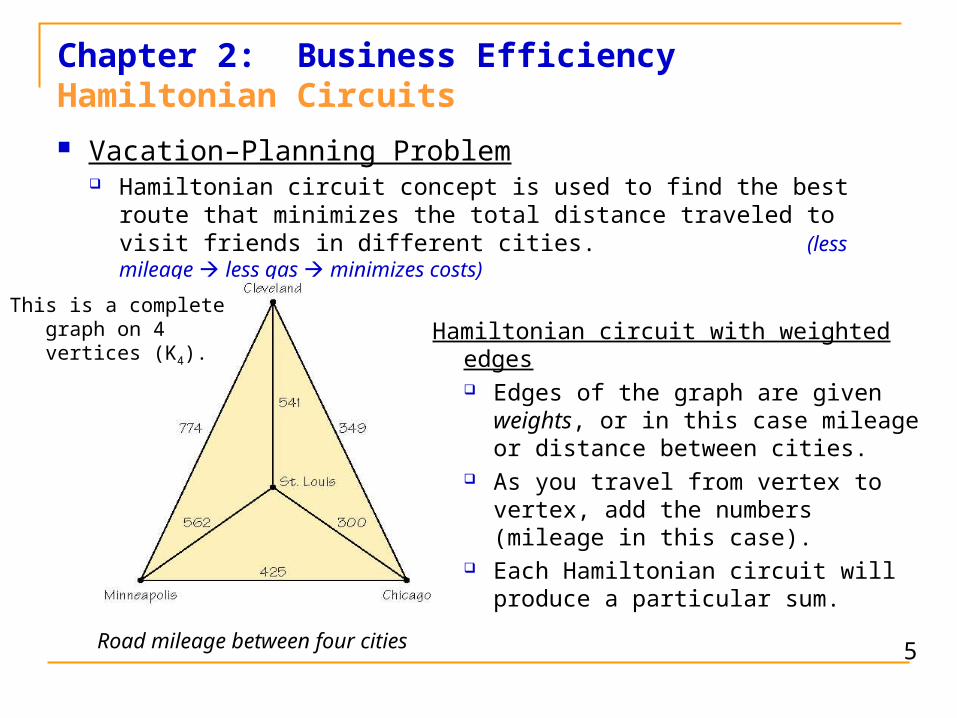
Vacation–Planning Problem Hamiltonian circuit concept is used to find the best route that
minimizes the total distance traveled to visit friends in different cities. (less mileage less gas minimizes costs)
Road mileage between four cities
5
Hamiltonian circuit with weighted edges Edges of the graph are given
weights, or in this case mileage or distance between cities.
As you travel from vertex to vertex, add the numbers (mileage in this case).
Each Hamiltonian circuit will produce a particular sum.
This is a complete graph on 4 vertices (K4).
Chapter 2: Business EfficiencyHamiltonian Circuit
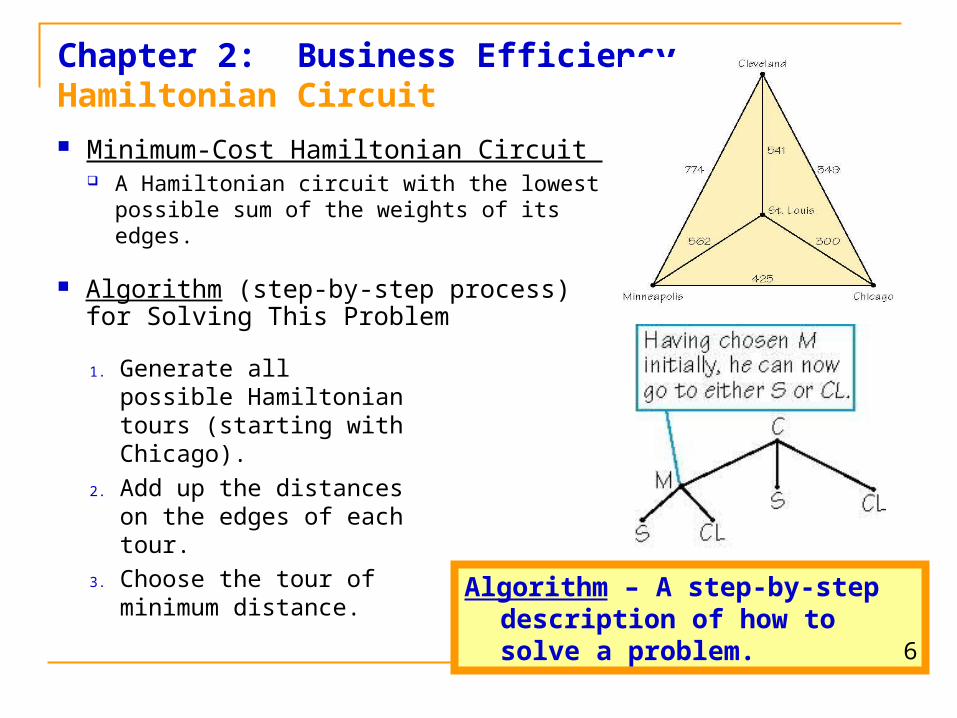
Algorithm – A step-by-step description of how to solve a problem.
Minimum-Cost Hamiltonian Circuit A Hamiltonian circuit with the lowest
possible sum of the weights of its edges.
Algorithm (step-by-step process) for Solving This Problem
6
1. Generate all possible Hamiltonian tours (starting with Chicago).
2. Add up the distances on the edges of each tour.
3. Choose the tour of minimum distance.
Chapter 2: Business EfficiencyHamiltonian Circuits
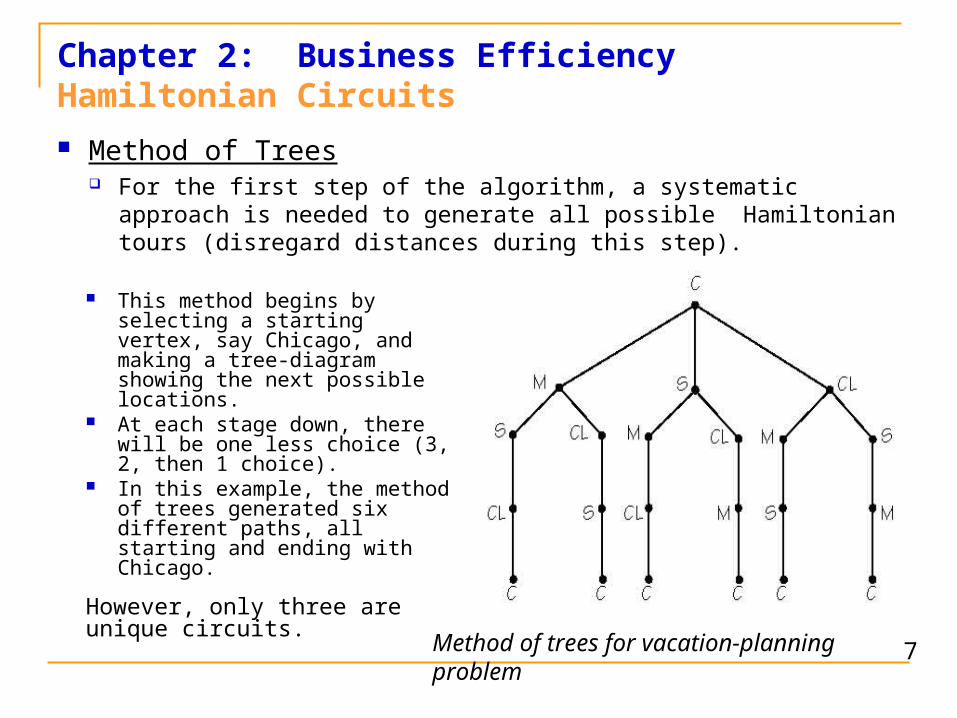
Method of trees for vacation-planning problem
7
Method of Trees For the first step of the algorithm, a systematic approach is
needed to generate all possible Hamiltonian tours (disregard distances during this step).
This method begins by selecting a starting vertex, say Chicago, and making a tree-diagram showing the next possible locations.
At each stage down, there will be one less choice (3, 2, then 1 choice).
In this example, the method of trees generated six different paths, all starting and ending with Chicago.
However, only three are unique circuits.
Chapter 2: Business EfficiencyHamiltonian Circuits
8
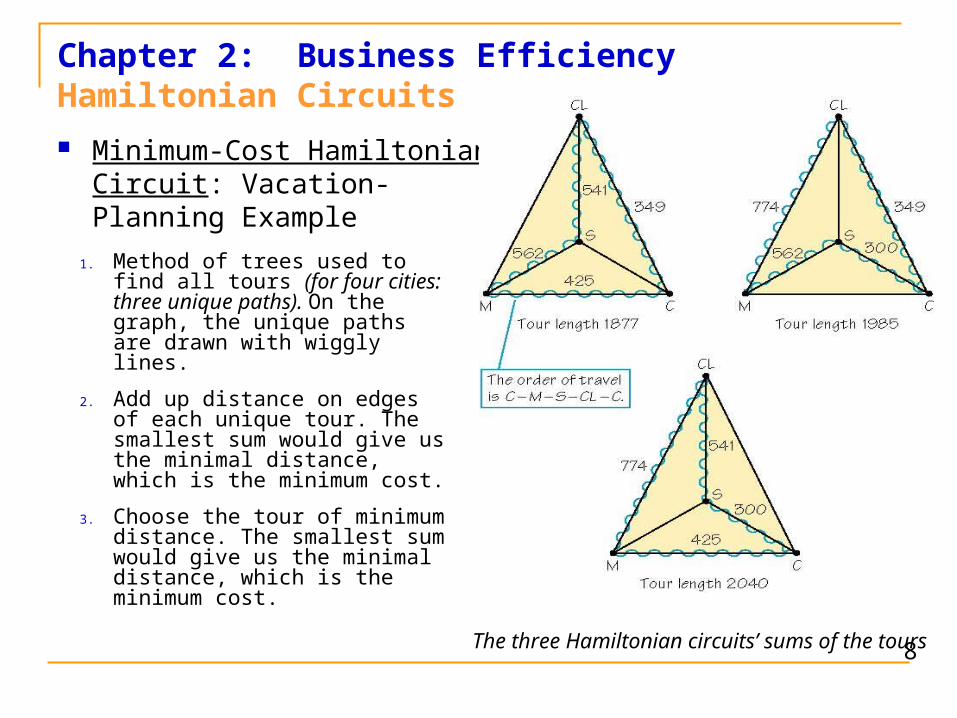
The three Hamiltonian circuits’ sums of the tours
Minimum-Cost Hamiltonian Circuit: Vacation-Planning Example
1. Method of trees used to find all tours (for four cities: three unique paths). On the graph, the unique paths are drawn with wiggly lines.
2. Add up distance on edges of each unique tour. The smallest sum would give us the minimal distance, which is the minimum cost.
3. Choose the tour of minimum distance. The smallest sum would give us the minimal distance, which is the minimum cost.
Chapter 2: Business EfficiencyHamiltonian Circuit
9
Principle of Counting for Hamiltonian Circuits For a complete graph of n vertices, there are (n
- 1)! possible routes. Half of these routes are repeats, the result is:
Possible unique Hamiltonian circuits are
(n - 1)! / 2
Complete graph – A graph in which every pair of vertices is joined by an edge.
Fundamental Principle of Counting If there are a ways of choosing one thing,
b ways of choosing a second after the first is chosen,
c ways of choosing a third after the second is chosen…, and so on…,
and z ways of choosing the last item after the earlier choices,
then the total number of choice patterns is a × b × c × … × z.Example: Jack has 9 shirts and 4 pairs of pants. He can wear 9 × 4 = 36 shirt-pant outfits.
Read Example 2 on p. 42.
10
Traveling Salesman Problem (TSP) Difficult to solve Hamiltonian circuits when the number of vertices
in a complete graph increases (n becomes very large). See p. 43. This problem originated from a salesman determining his trip that
minimizes costs (less mileage) as he visits the cities in a sales territory, starting and ending the trip in the same city.
Many applications today: bus schedules, mail drop-offs, telephone booth coin pick-up routes, etc.
How can the TSP be solved? Brute force method as we did in the Vacation Planning
example. This is not practical if n is large. Heuristic methods can be used to find a “fast” answer, but
does not guarantee that it is always the optimal answer. Nearest neighbor algorithm Sorted edges algorithm
Chapter 2: Business EfficiencyTraveling Salesman Problem
Chapter 2: Business EfficiencyTraveling Salesman Problem — Nearest Neighbor
11
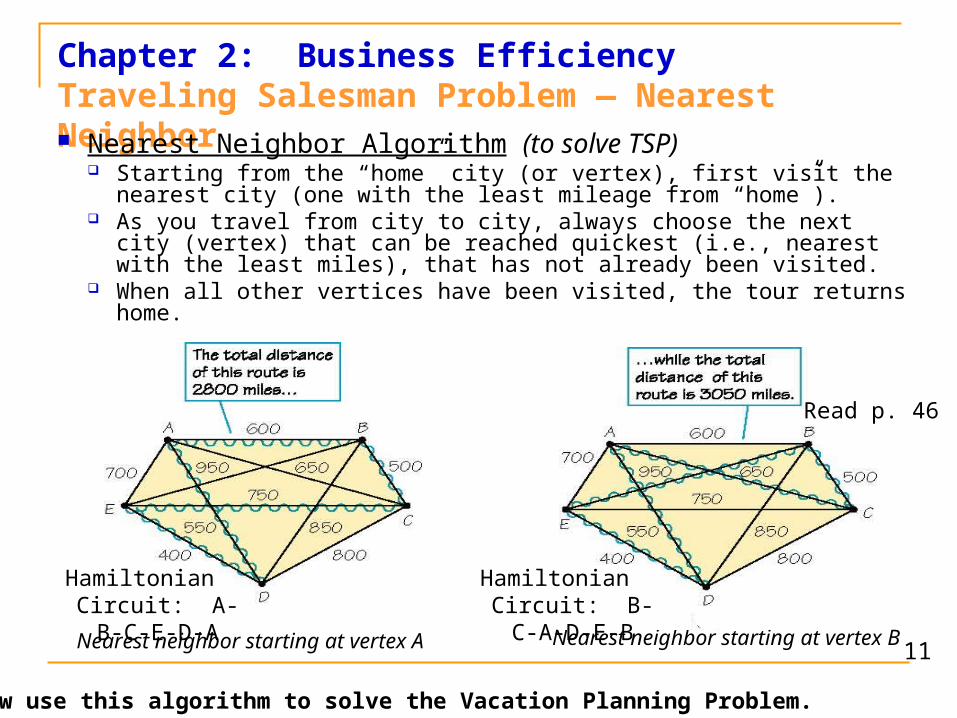
Nearest neighbor starting at vertex A
Nearest Neighbor Algorithm (to solve TSP) Starting from the “home” city (or vertex), first visit the nearest city
(one with the least mileage from “home”). As you travel from city to city, always choose the next city (vertex)
that can be reached quickest (i.e., nearest with the least miles), that has not already been visited.
When all other vertices have been visited, the tour returns home.
Nearest neighbor starting at vertex B
Hamiltonian Circuit: A-B-C-E-D-A
Hamiltonian Circuit: B-C-A-D-E-B
Now use this algorithm to solve the Vacation Planning Problem.
Read p. 46
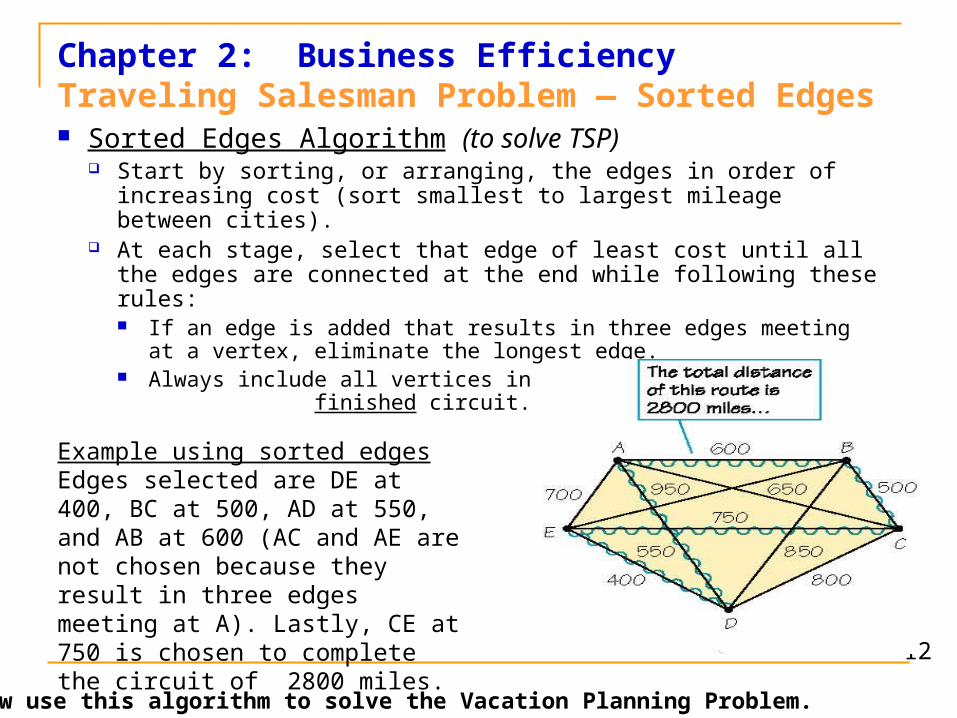
Chapter 2: Business EfficiencyTraveling Salesman Problem — Sorted Edges Sorted Edges Algorithm (to solve TSP)
Start by sorting, or arranging, the edges in order of increasing cost (sort smallest to largest mileage between cities).
At each stage, select that edge of least cost until all the edges are connected at the end while following these rules: If an edge is added that results in three edges meeting at a
vertex, eliminate the longest edge. Always include all vertices in the
finished circuit.
12
Example using sorted edges Edges selected are DE at 400, BC at 500, AD at 550, and AB at 600 (AC and AE are not chosen because they result in three edges meeting at A). Lastly, CE at 750 is chosen to complete the circuit of 2800 miles.
Now use this algorithm to solve the Vacation Planning Problem.
Many methods for solving the TSP have been suggested. However, none of these methods guarantees an optimal solution.
A Heuristic algorithm is a method of solving an optimization problem that is fast but does not guarantee an optimal answer to the problem
A Greedy algorithm is an approach for solving an optimization problem, where at each stage of the algorithm the best or cheapest action is taken. Greedy algorithms do no always lead to optimal solutions.
The Nearest-Neighbor algorithm and the Sorted-Edges algorithm are examples of Heuristic algorithms and Greedy algorithms.
Chapter 2: Business EfficiencyTraveling Salesman Problem
Chapter 2: Business EfficiencyMinimum-Cost Spanning Trees
14
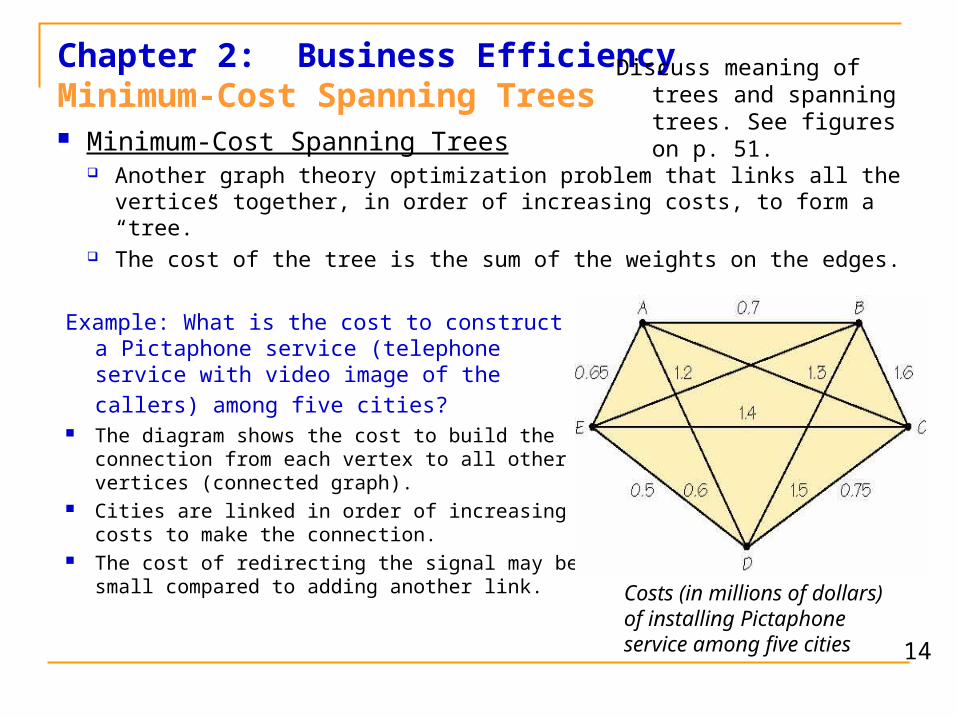
Costs (in millions of dollars) of installing Pictaphone service among five cities
Minimum-Cost Spanning Trees Another graph theory optimization problem that links all the
vertices together, in order of increasing costs, to form a “tree.” The cost of the tree is the sum of the weights on the edges.
Example: What is the cost to construct a Pictaphone service (telephone service with
video image of the callers) among five cities? The diagram shows the cost to build the
connection from each vertex to all other vertices (connected graph).
Cities are linked in order of increasing costs to make the connection.
The cost of redirecting the signal may be small compared to adding another link.
Discuss meaning of trees and spanning trees. See figures on p. 51.
Chapter 2: Business EfficiencyMinimum-Cost Spanning Trees
15
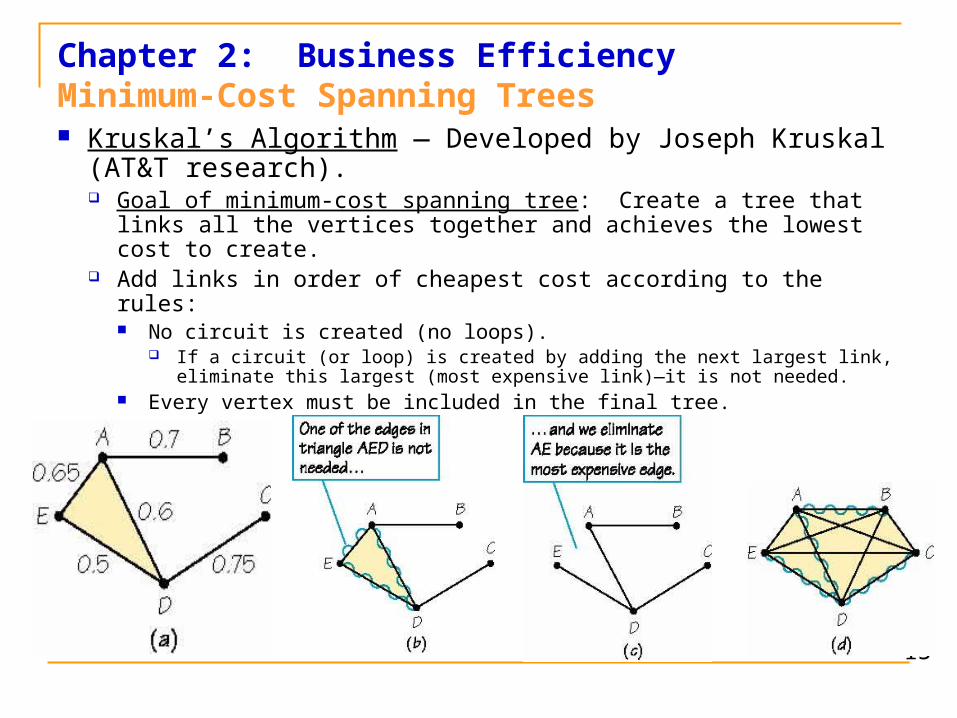
Kruskal’s Algorithm — Developed by Joseph Kruskal (AT&T research). Goal of minimum-cost spanning tree: Create a tree that links all
the vertices together and achieves the lowest cost to create. Add links in order of cheapest cost according to the rules:
No circuit is created (no loops). If a circuit (or loop) is created by adding the next largest link, eliminate this
largest (most expensive link)—it is not needed. Every vertex must be included in the final tree.
A Spanning Tree Example
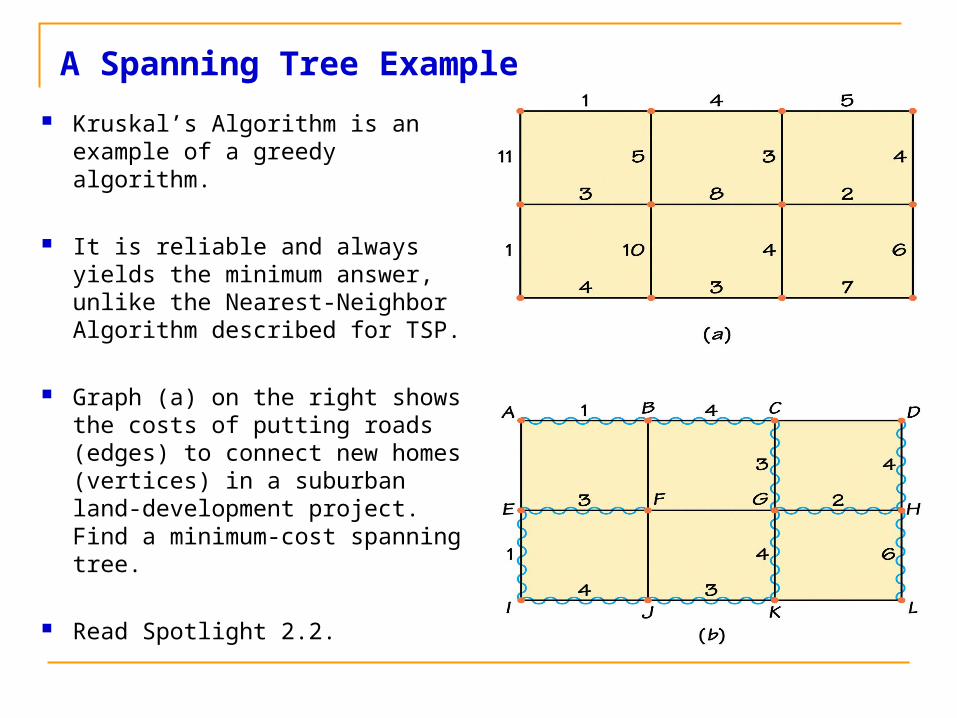
Kruskal’s Algorithm is an example of a greedy algorithm.
It is reliable and always yields the minimum answer, unlike the Nearest-Neighbor Algorithm described for TSP.
Graph (a) on the right shows the costs of putting roads (edges) to connect new homes (vertices) in a suburban land-development project. Find a minimum-cost spanning tree.
Read Spotlight 2.2.
Chapter 2: Business EfficiencyCritical Path Analysis
17
Critical Path Analysis Most often, scheduling jobs consists of complicated tasks that
cannot be done in a random order. Due to a pre-defined order of tasks, the entire job may not be
done any sooner than the longest path of dependent tasks. Order-Requirement Digraph
A directed graph (digraph) that shows which tasks precede other tasks among the collection of tasks making up a job.
Critical Path The longest path in an order-requirement digraph. The length is measured in terms of summing the task times of the
tasks making up the path.
Sometimes, we are interested in finding the longest path.
Scheduling machines and people is difficult since the tasks cannot be done in a random order.
Example: Thanksgiving Dinner.
If the tasks cannot be performed in a random order, we can specify the order in an order-requirement digraph.
A digraph can be used to illustrate that traffic on a street must go in one direction or that certain tasks in a job must be completed prior to other tasks.
Chapter 2: Business EfficiencyCritical Path Analysis
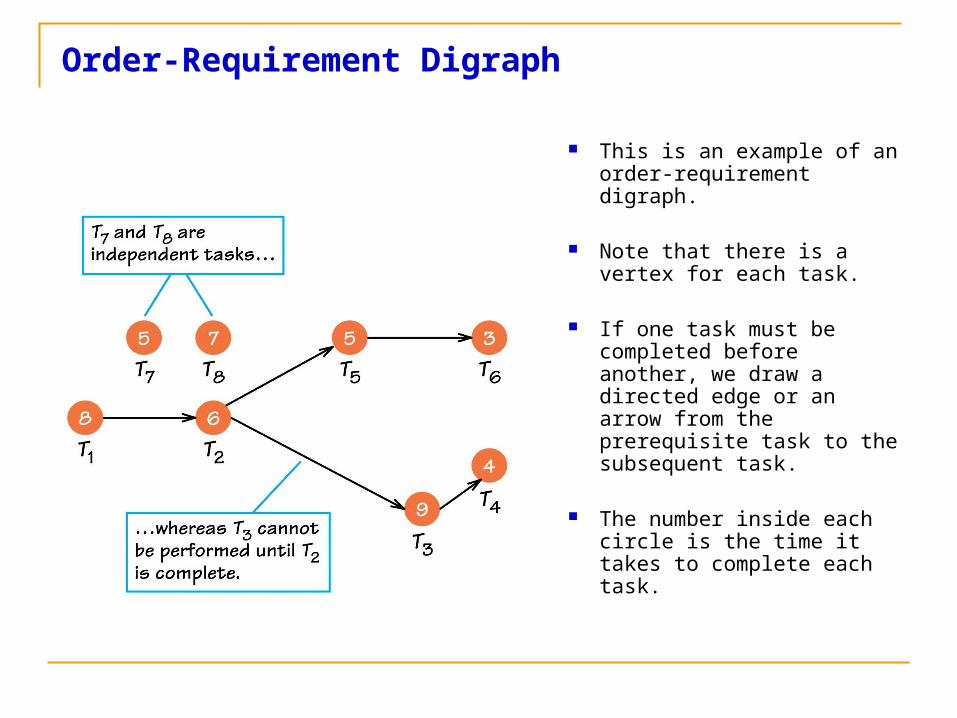
Order-Requirement Digraph
This is an example of an order-requirement digraph.
Note that there is a vertex
for each task.
If one task must be completed before another, we draw a directed edge or an arrow from the prerequisite task to the subsequent task.
The number inside each circle is the time it takes to complete each task.
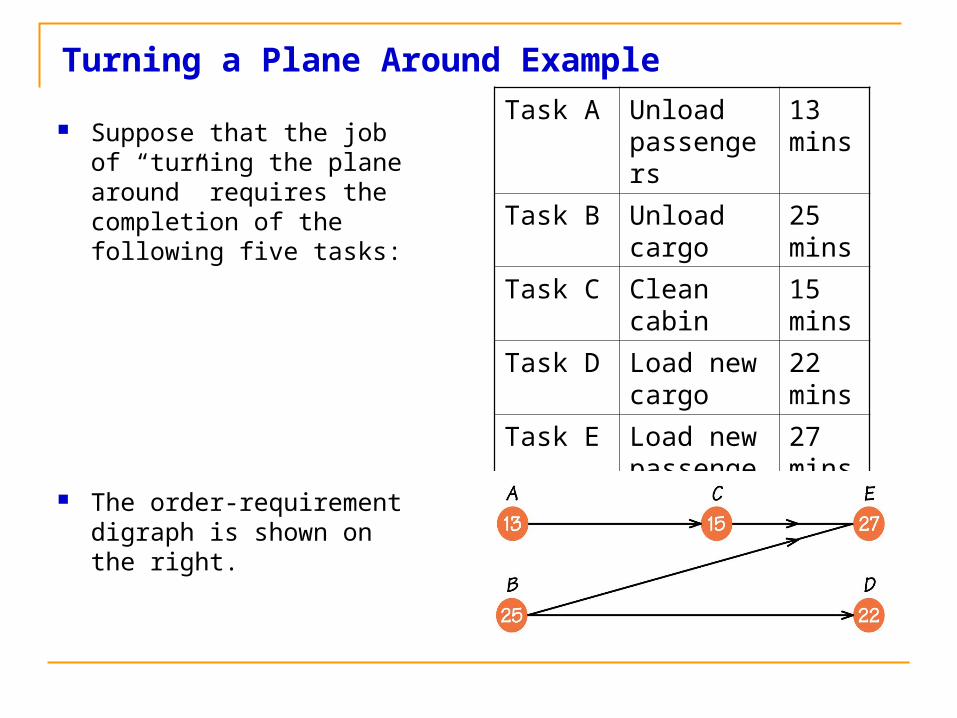
Turning a Plane Around Example
Suppose that the job of “turning the plane around” requires the completion of the following five tasks:
The order-requirement digraph is shown on the right.
Task A Unload passengers
13 mins
Task B Unload cargo
25 mins
Task C Clean cabin
15 mins
Task D Load new cargo
22 mins
Task E Load new passengers
27 mins
Turning a Plane Around Example continued…
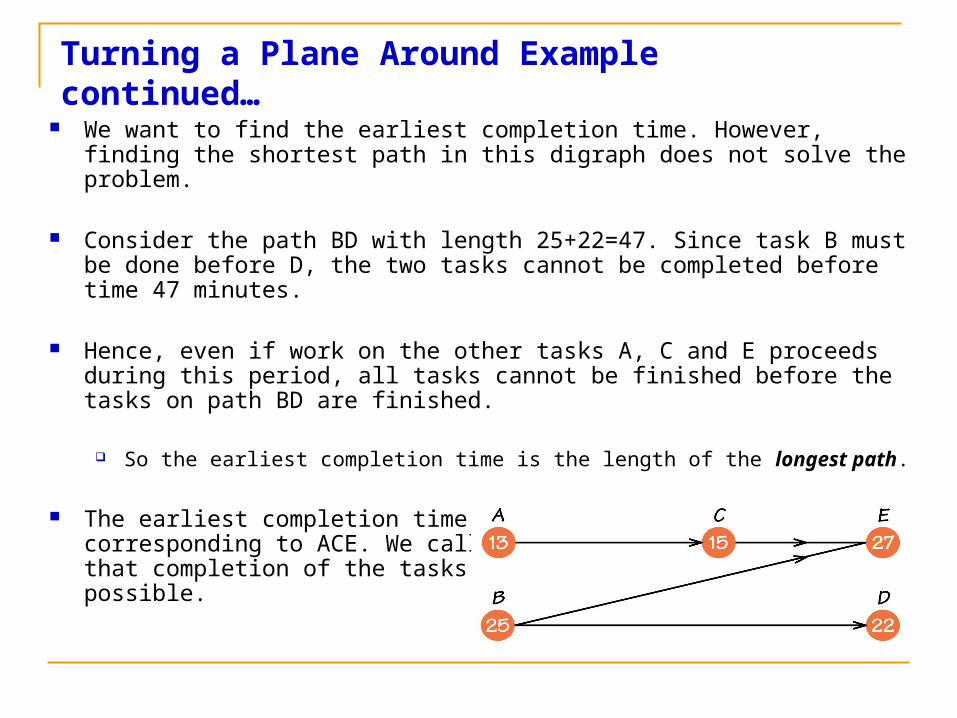
We want to find the earliest completion time. However, finding the shortest path in this digraph does not solve the problem.
Consider the path BD with length 25+22=47. Since task B must be done before D, the two tasks cannot be completed before time 47 minutes.
Hence, even if work on the other tasks A, C and E proceeds during this period, all tasks cannot be finished before the tasks on path BD are finished.
So the earliest completion time is the length of the longest path.
The earliest completion time is 13+15+27=55 minutes corresponding to ACE. We call ACE the critical path. Note that completion of the tasks in less than 55 minutes is not possible.