chapter 3 channel allocation and multi-agent system: a literature...
TRANSCRIPT

sectoring, splitting, and micro-cell zone concept are also discussed to improve the
capacity of a cellular system by increasing S/I. The major objective of these methods is to
increase the number of subscribers in a system.
Chapter 3
Channel Allocation and Multi-agent System: A
Literature Survey
3.1Introduction
Though there has been a remarkable increase in the mobile user population, the narrow
radio spectrum allocated for communication is limited. The channel allocation aims to
allocate number of channels to each cell in such way that maximum frequency spectrum
utilization takes place and interference is minimized. In this chapter various schemes that
are used to allocate channels to the cells are reviewed and performance of each of these
schemes is discussed.
3.2The Channel Allocation Problem
The Channel Allocation Problem has two aspects [80]:
i. Frequencies are allocated to a pair of wireless communication connections in such
a way that data transfer between every connection is possible. The frequencies must
be selected from a pre-specified set and different frequencies should be allocated to
each connection. For bidirectional traffic, two frequencies should be selected one for
each direction.
ii. The frequencies allocated to different connections may interfere with each other
resulting in a loss of signal quality. The following two conditions must be satisfied
for interference to take place:
a) The frequencies must either be close on the electromagnetic band or
harmonics of one another. However, latter effect is very limited.
44

b) The two interfering connections must be very close to each other. The
interfering signals must have similar energy levels at the positions where they
may disturb each other.
The radio frequency band [fmin, fmax] provided to service provider is generally partitioned
in a set of channels, and all the channels are having same bandwidth δ of frequencies.
The channels are generally numbered from 1 to N, where N = (fmax - fmin)/ δ and the
existing channels are denoted by the domain D = {1, . . . , N}. It may happen that not all
the channels from a domain D are available for a particular connection. The channels
available for a particular connection v form a subset Dv ∈ D and information can be
transmitted from transmitter to receiver on each available channel. Two channels are
required for bidirectional communication, one for each direction. The second channel is
always ignored n the models considered in the literature. Instead of using one band [fmin,
fmax], most of the applications use two bands [f1min, f1
max] and [f2min, f2
max] of N channels:
one with the channels {1, . . . , N}, and another with the channels {s + 1 , . . . , s + N},
where s >> N. Therefore, the backward connection uses a channel which is shifted s
channels up in the frequency domain. The s should be chosen in such way that backward
channels do not interfere with the forward channels. As a result, every allocation for the
forward channels can directly be transformed to an allocation for the backward channels
with comparable performance.
Interference of signals at the receiver is measured by the signal-to-noise ratio or signal-
to-interference ratio. Therefore, the transmitted signal must be clearly understandable.
The noise generally comes due to the presence of other signals using same as well as
adjacent frequencies. There may be more than one sources present in the area that
transmits on the same or a close frequency and, therefore, contribute to the noise at the
receiver. In practical conditions, a threshold value of around 15 dB is found acceptable
for the signal-to-noise ratio. The calculation of the interference level is a hard job, since it
not only depends on the choice of signal and its strength, but also on the environment. If
the environment factor is ignored and considers only the signals transmitted at the same
frequency channel, then the interference at the receiver is computed with the following
formula:
45

P/dγ
where P is the transmitter power and d is the distance to the troubled receiver, whereas, γ
is a fading factor ( 2 ≤ γ ≤ 4). If the interfering signal is transmitted on a frequency, which
is present at a distance of n ≥ 1 units of the original signal, then a filtering factor of -15(1
+ log2n) is also taken into consideration [139]. The fact that the presence of multiple
signals in the area may disturb communication quality, is overlooked in most of the
models. A prominent exception is given by Fischetti et al., in which in order to determine
the interference of neighboring connections, some constraints are developed and another
assumption is the calculation of the levels of interference [124].
The two-way traffic creates several problems, as interference may not be symmetric: if a
transceiver pair (t1, t2) transmitting on frequencies f and (f + s) from t1 to t2, and another
transceiver pair (s1, s2) transmitting on frequencies g and (g + s) where f and g interfere,
(f + s) and (g + s) interfere, the amount of interference at t1 and t2 may be different
because these transceivers may possibly be having different distances from s1 and s2. This
aspect is also overlooked by most researchers.
Based on the application, one or multiple connections may be set between the same end
points. Therefore, this is modeled by assuming that (cz ∈Z+) frequencies are allocated to
connection v. Therefore, with the introduction of an extra value for certain combination
of frequencies (f,g ∈ D), the interference between frequencies allocated to the same
connection can only be avoided. In practical conditions and based on the demand for
connections, the value cz may vary with time. Through this property, the methods
suggested to deal with the channel allocation problem can be divided into three
categories: Fixed Channel Allocation (FCA), Dynamic Channel Allocation (DCA), and
Hybrid Channel Allocation (HCA).
In FCA, radio channels are allocated to each connection in advance and allocation is
based on the forecasted demand. Therefore, in order to satisfy the demand for
connections the radio channel allocation is not allowed to change on-line. Whereas, in
DCA schemes frequencies are allocated on-line to the wireless connections in such a way
46

that the actual demand is met and the interference is minimized. An example of a
procedure for DCA is presented by Janssen [85], who discussed the fixed preference
assignment scheme for DCA. According to this paper, for every cell a preference list of
frequencies exist to meet the demand and the preference lists must be created in such a
way, so that it should be optimal according to some performance measure.
Finally, HCA scheme is a combination of FCA and DCA and is implemented to get an
enhanced overall performance of the network. In HCA schemes some of the frequencies
are allocated to every connection beforehand, whereas rest of the frequencies can be used
for on-line allocation upon request. An example of an HCA scheme is given by
Sandalidis et al., who describe the neural network and genetic algorithm methods for
channel borrowing in order to solve the channel allocation problem [76]. In this scheme,
frequencies are allocated permanently to the connections. However, when the demand for
frequencies exceeds the number of frequencies available in the area, the connection can
borrow an unused frequency allocated to an adjacent connection. The performance of
networks that work on DCA and HCA schemes is generally studied via simulation of the
part time methods. It is also proved by Johri [153] that DCA schemes perform better than
FCA schemes under light traffic and non-uniform traffic loads. However, FCA schemes
perform better than DCA under uniform and heavy load. Katzela and Naghshineh [80]
provided a survey on the topic of FCA, DCA and HCA schemes.
3.3Fixed Channel Allocation
In FCA, fixed numbers of radio channels are allocated to each connection based on the
expected load. The standard representation of a CAP is by means of a graph G = (V,E),
where V is the vertices and E is the edges of the graph, also called the interference graph
or constraint graph. Each connection is represented by vertex v ∈ V. The available
channels for a vertex are denoted by the set Dv ⊆ D. Ci denote the number of frequencies
or channels required for connection v ∈ V. Two vertices v and w for which the
corresponding connection may interfere for at least one pair of frequencies, are connected
by an edge {v,w} ∈ E. For each pair of frequencies f ∈ D, and g ∈ D, the combined
47

choice of frequencies is penalized by a measure depending on the interference level and
pvwfg the penalty. The interference between frequencies f ∈ D, and g ∈ D, allocated to the
same vertex v can be represented in the same way: an edge {v, v} ∈ E and penalty pvvfg.
This can also be modeled in a different way, replacing v and cv vertices and additional
edges between them. In order to reduce the interference, some instances to deal with a
frequency plan are considered, and this reduction in interference happens under minimum
changes of the total frequency plan, therefore, changes in the frequency plan are also
penalized per change. This is modeled with extra penalties imposed on the frequencies to
be selected for each vertex: the choice of frequency f ∈ Dv costs qvf.
Various methods to solve the CAP can be subdivided into two main steams and
frequencies are allocated to each vertex in such a way that either the maximum penalty
incurred by a solution (minmax) is minimized or total penalty incurred by the solution
(minsum).
3.3.1 Minimization of the Maximum Penalty
Instead of calculating a solution where the maximum penalty is minimized [194], [26], a
solution is searched where the incurred interference does not go beyond a given threshold
value. Therefore, certain frequencies and combinations of frequencies are not allowed.
This basically reduces the penalty matrices of the edges to 0, 1 matrices. Frequency
combinations with penalty 0 are allowed, whereas, penalty 1 is not allowed. Therefore,
the objective here is to find a feasible solution, i.e. a solution in which no prohibited
frequency combinations are selected. If such an allocation is present, a second objective
can be introduced. The second objective introduces a preference relation between all
feasible allocations. Therefore, the problem of minimizing or reducing the number of
used frequencies is called the minimum cardinality problem, or minimum order problem.
The objective in this case is to reduce or minimize the span, i.e., the difference between
the highest and lowest frequencies are selected.
If the incurred penalties go above the given threshold value in every allocation, two
solutions are possible. In the first solution, the threshold value can be increased for
48

allowing allocation with greater interference and the other solution is that, the partial
allocation can be searched that does not go over the set threshold penalty. Therefore, the
objective here is minimization of the blocking probability. If in any case mv frequencies
can be allocated to a connection instead of the requested cv frequencies, the probability to
reject a connection can be computed. This probability is called the blocking probability.
Optimal partial allocations can minimize or reduce the overall blocking probability of the
network.
3.3.2 Minimization of the Cumulative Penalty
The minsum method is not commonly seen in practical situations, but in some cases it is
linked with the minmax criterion by introducing the threshold values for penalties that
indicate the maximum acceptable interference. Then the feasible solutions are looked
with a minimum total penalty and no penalty should go beyond the threshold value. For
describing real-world problems, this combined form is found to be most exact, but it is
also the one, for which determining an optimal solution is very difficult.
Four different models to solve the CAP are:
(i) Minimum Order Channel Allocation Problem (MO-CAP)
(ii) Minimum Span Channel Allocation Problem (MS-CAP)
(iii) Minimum Blocking Channel Allocation Problem (MB-CAP)
(iv) Minimum (Total) Interference Channel Allocation Problem (MI-CAP)
3.3.3 Channel Allocation and Graph Coloring
The minmax criterion is strongly linked to generalized coloring problems e.g. T-coloring
or list coloring and this relation have been first explained by Metzger [26] and Hale
[194]. The relation of looking a feasible solution with graph coloring, is due to two basic
modeling aspects: first, the levels of interference (in acceptable and unacceptable levels),
reduces the problem to prohibited combinations and permitted combinations similar to
graph coloring problem, where two adjacent vertices are not allowed to color, with the
same color. Second, in many cases the interference levels are associated with the distance
49

between the allocated frequencies: the smaller the distance between two allocated
frequencies, the larger is the interference level pvwfg. Therefore, interference between the
connections v and w is defined unacceptable if f ∈ Dv and g ∈ Dw are located at a
distance lesser than dvw of each other. The interference is acceptable if the radio
frequencies distance, i.e., | f – g | ≥ dvw is large. Now, if the problem is relaxed by setting
all dvw = 1 for {v, w} ∈ E, which is not far away from reality, then equal choices of
frequencies are penalized for connected vertices. Therefore, frequencies are viewed as
colors, and a solution should have very few edges for which the end vertices are allocated
the same colors.
In a more general setting, it is not permitted to allocate frequencies that is different from
a value contained in a set Tvw (containing 0), i.e., |f - g| ∉ Tvw and if Tvw is defined by
{0,...., dvw - 1} then the problems are alike. However, more general sets with non-
consecutive numbers can also be defined e.g. in UHF television broadcasting the set Tvw
contains non-successive set of integers [194]. If all sets Tvw are, then the problem is
reduced to a T-coloring problem, as introduced by Hale [78]. He properly defined both
minimum span and minimum order variants of T-coloring problem, and linked them to
the channel allocation problem.
Another method to represent the minimum distance constraints is through the use of a
compatibility matrix C, where the rows and columns of the matrix correspond to the
connections. The values Cvw = dvw indicate the minimum frequency separation distance. In
case Cvw = 0, v and w are not adjacent vertices, and no constraint on the allocated
frequencies exists and the constraints are differently depending on the value of Cvw. The
co-channel, adjacent-channel, and co-site constraints can be differentiated based on the
values of Cvw. The co-channel and adjacent-channel constraints are commonly used to
define a difference between values, if Cvw = 1 (same frequencies cannot be allocated to
both the connections), and if Cvw ≥ 2 (adjacent channels cannot be allocated to the
connections), respectively.
3.4Minimum Order Channel Allocation Problem
50

In the minimum order channel allocation problem (MO-CAP), radio channels are
allocated in such a way that no intolerable interference occurs, and the number of
different used frequencies for a particular connection is minimized. Therefore, the
problem can be described as follows:
INSTANCE: Undirected graph G = (V, E), {v,v}∈ E, for all v ∈ V, sets Tvw ⊂ Z, {v, w}
∈ E, 0 ∈ Tvw demand cv ∈ Z+, domain subsets Dv ⊆ Z+ for all v ∈ V, D = Uv∈VDv, and
positive integer K.
QUESTION: Find the minimum order allocation of subsets f : V → 2D such that,
(i) )(vf = cv,
(ii) F(v) ⊆ Dv,
(iii) ∉− gf Tvw,
(iv) U v∈V )(vf ≤ K?
The MO-CAP is the first frequency allocation problem that was discussed in the
literature. According to Hale [194], Metzger [26] has brought this problem into the notice
of operations research society. Therefore, MO-CAP is a clear generalization of the graph
coloring problem.
According to Garey and Johnson [131] Graph K-Colorability is:
INSTANCE: Undirected graph G = (V, E), and positive integer K ≤ |V|.
QUESTION: Is G a K-colorable graph, i.e., does there exist a function f : V → {1,2,.., K}
such that fu ≠ fw whenever {u, w} ∈ E?
Minimum number of colors required to color the graph is expressed as χ (G)- and it is
proved by Karp that Graph K-Colorability problem is NP-complete for all K > 3 [162].
As a result, MO-CAP is NP-complete as well. Garey and Johnson proved that within a
factor 2 approximation of the optimal value is NP-complete as well [130]. Hale proposed
a generalization of graph coloring and is therefore, known as T-coloring [194].
Minimum Order T-Coloring Problem as explained by (Hale [194]) is:
51

INSTANCE: Undirected graph G = (V,E), set T ⊂ Z+, {v, w} ∈ E, 0 ∈ T, and positive
integer K.
QUESTION: Does there exist an allocation f : V → Ζ + such that, fv - fw∉ T for all
{v, w} ∈ E and Uv∈V Fv ≤ K?The minimum number of colors required to color a graph G with respect to a set T is
denoted by χ Τ (G). Cozzens and Roberts have proved that χ Τ (G) = χ (G): Let (fv)v∈V
be a coloring for G, and let (tmax = maxt∈T t+1). Then the coloring (tmaxfv) v∈V is a feasible
T-coloring [39].
As a result, research in this direction has largely been focused on the graph coloring
problem in place of the T-coloring problem, or on the minimum span T-coloring
problem.
Another generalization of graph coloring problem is the List Coloring Problem.
Therefore, Minimum Order List Coloring Problem according to Erdos et al. [152], and
Vizing [192] is:
INSTANCE: Undirected graph G = (V, E), subsets Dv ⊂ Z+ (lists) for all v ∈ V, D = Uv
∈VDv, and positive integer if.
QUESTION: Does there exist an allocation of subsets f : V → D such that,
(i) fv ∈ Dv,
(ii) fv ≠ fw for all {v, w} ∈ E and,
(iii) Uv∈V F(v) ≤ K?
The Minimum Order List Coloring Problem is NP-complete, even for special purpose
graphs the graph coloring problem may be solved in linear time, e.g. for interval graphs
[121].
52

For the common MO-CAP, Aardal et al. [107] has presented an integer linear
programming formulation. For each vertex v and offered frequency f, a binary variable is
introduced:
∈
=
otherwise 0
vertex toassigned is D ffrequency if 1 v
vxvf
Moreover, a binary variable yf denotes the use of frequency f :
∈
=
otherwise 0
sed is D ffrequency if 1
uyf
Then, MO-CAP reads
min ∑∈Df
fy (3.1)
s.t. vc =∑∈Dvf
vfx V ∈∀v (3.2)
xvf + xwg ≤ 1 { } wv Dg DfEwv , , , ∈∈∈∀( ) ( ) ( )( )wvgfTgf vw - ≠∨≠∧∈ (3.3)
xvf ≤ yf vDfVv , =∈∀ (3.4)xvf = {0, 1} vDfVv , =∈∀ (3.5)yf = {0, 1} ∀ Df ∈ (3.6)
The constraints (3.2) model that cv frequencies have to be allocated to connection v ∈ V.
The constraints (3.3) modeled the prohibited set of frequencies, whereas (3.4) specifies
that if the resultant frequency is used by the allocation the variable y is set to. The goal
(3.1) just sums the use of the existing frequencies.
3.4.1 Lower Bounds and Exact Methods
In the CALMA project, Aardal et al. [107] had used integer programming techniques to
solve the problem. Cutting planes were added by them to the formulation (3.1)-(3.6). For
related vertex packing problem, the used cutting planes are very well known suitable
inequalities. Extra preprocessing techniques and particular branching strategies have
actually made it feasible to solve large instances (up to 916 vertices) to optimality. For all
53
the examined instances, optimal values were proved in this way. The lower bounds based
on linear programming (LP) were compared with bounds obtained through combinatorial
arguments like cliques in the coloring number (col.), and the generalized coloring (gcol.).
In all the 4 cases, the linear programming (LP) provided the best bound.
Hurkens and Tiourine calculated minimum order lower bounds of any allocation [36]. In
the constraint graphs, the lower bounds were obtained through the detection of cliques.
The clique lower bound can be enhanced by the combination of the information about
several cliques.
Finally, Kolen et al. applied the constraint satisfaction techniques to the MO-CAP [14].
The optimal solution is reported only for two instances by the combination of lower and
upper bounds created by the proposed technique.
3.4.2 Heuristics
Most of the heuristics for MO-CAP were proposed in the CALMA project. Besides lower
bounding techniques, Tiourine, Hurkens, and Lenstra [36][170] have also applied local
search techniques, e.g. simulated annealing (SA), variable depth search (VDS), and tabu
search (TS) [171]. Tabu search was applied by a group from King's College London as
well [2] [1]. As compared to the tabu search approach, the neighborhood function is less
sophisticated [170]. Moreover, Bouju et al. also applied a General NETwork algorithm
(GENET) for constraint satisfaction problems to the same instances [1]. They got optimal
or near optimal solutions.
A potential reduction (PR) algorithm for the MO-CAP was introduced by Warners et al.
[92] [91]. The algorithm is motivated by Karmarkar's interior point potential reduction
method for combinatorial optimization problems ([13], [141], [142]). Pasechnick [42]
enhanced the performance of the algorithm, and the optimal values of the instance
GRAPH 14 were proved.
Genetic algorithm was applied to the instances by Kapsalis et al. [4]. The obtained results
are found less satisfactory than the other algorithms, and the optimal solutions have been
54

obtained only for two instances. Crisan et al. [31] applied evolutionary search (ES) to
MO-CAP. Evolutionary search performs the repetitive mutation of a solution according
to a certain mutation operator. The performance of an evolutionary search algorithm was
investigated on a CALMA instance, and the search space was analyzed in order to get
some information on the difficulty of the instances. They found that there is very less
association between two good frequency allocation plans, than between two good tours in
the traveling salesman problem. This shows that local search techniques will encounter
more difficulties to arrive at the optimum solution for MO-CAP, than similar heuristics
for the traveling salesman problem. Their results with evolutionary search are similar
with the results of simulated annealing, tabu search, and variable depth search [170].
Finally, a genetic algorithm approach was applied by Cuppini [122] to the minimum
order problem. As compared to the other genetic algorithms for CAPs, an allocation is
represented by |D| genes of N = ∑ ∈VvvC elements (in the majority genetic algorithms |
V| genes of size |Dv| are used to represent an allocation).
3.5 Minimum Span Channel Allocation Problem
In the minimum span channel allocation problem (MS-CAP), the problem is to allocate
frequencies in such a way that no intolerable interference should occur, and the difference
between the maximum and minimum used frequency (the span), is minimized [194].
Therefore, the problem has been described as follows:
INSTANCE: Undirected graph G = (V, E ) , {v, v} ∈ E, for all v ∈ V, sets Tvw ⊂ Z,
{v, w} ∈ E, 0 ∈ Tvw, demand cv ∈ Z+, domain subsets Dv, ⊆ Z+ for all v ∈V, D = Uv∈
VDv and positive integer K.
QUESTION: Does there present an allocation of subsets f : V → 2D such that,
(i) )(vf = cv,
(ii) F(v) ⊆ Dv,
(iii) ∉− gf Tvw for all {v, w} ∈ E, f ∈ f(v), g ∈ f(w), v ≠ w or f ≠ g , and
(iv) max Uv∈VF(v) – min Uv∈VF(v) ≤ K?
55

The problems MO-CAP and MS-CAP are comparable [194], if Dv = Z+ and Tvw = {0}.
However, there exist examples in which neither a minimum order allocation with
minimum span, nor a minimum span allocation with minimum order is present. The
minimum span T-coloring got lot of attention, due to its association with both the
coloring problem and the MS-CAP. A survey on T-coloring problems was presented by
Roberts [64]. Theoretical results on T-coloring for MS-CAP are taken by Griggs and Liu
[93] and Liu [50]. A survey on frequency allocation problems with importance on the
relation with graph theory was presented by Murphey et al. [161].
Several authors have analyzed coloring problems associated to MS-CAP. Lower and
upper bounds were presented by Kubale [125], and considered exceptional cases for a
graph-coloring problem associated to the MS-CAP in which each vertex v is colored with
cv consecutive colors. Like in the MS-CAP the span of the allocation should be
minimized. Kubale presented the complexity results for another minimum span coloring
problem with prohibited colors (minimum span list coloring) [126].
De Werra and Gay studied the interval T-coloring problem, in which c consecutive colors
are allocated to v in such a way that the allocation does not violate the sets Tvw [48]. This
problem is comparable to an asymmetric MS-CAP, i.e. a CAP in which, instead of | f – g|
∈ Tvw, f-g ∈ Tvw have to be satisfied, where Tvw ⊂ Z may also contain negative numbers,
and is not essentially symmetric with respect to 0. Upper bounds were also derived on the
minimum span of the asymmetric MS-CAP. Additionally, a heuristic based on the graph
coloring algorithms of Brelaz was also applied on randomly generated instances [58].
An integer programming formulation related to (3.1)-(3.6) is as follows:
min zmax - zmin
(2.7)vc =∑
∈Dvf
vfx Vv ∈∀ (3.8)
xvf + xwg ≤ 1 { } wv Dg DfEwv , , , ∈∈∈∀( ) ( ) ( )( )wvgfTgf vw - ≠∨≠∧∈ (3.9)
56
2
6 7
3 2 4 2 5
8 2 9 10
13 14 16 17
19 20 321 2
8 25
15 18
8 2 8 2 8
52 2 77 28
15 57 28
10 13 8 2

xvf ≤ yf vDfVv , =∈∀ (3.10)zmax ≥ fyf ∀ Df ∈ (3.11)zmin ≤ fmax – (fmax – f )yf ∀ Df ∈ (3.12)
xvf = {0, 1} vDfVv , =∈∀ (3.13)yf = {0, 1} ∀ Df ∈ (3.14)zmin - zmax ∈ Z+ (3.15)
where fmax = maxf∈Df is the maximum available frequency, and zmin and zmax are extra
variables for the minimum and maximum used frequency, respectively. The constraints
(3.11) and (3.12) assure that these variables are set to the right values.
However, other ways to model the objective can also be applied. For instance, binary
variables lf and uf can also be instead of using y and z variables:
∈
=
otherwise 0
arg 1
usedthat isncyest frequeltheis Dfiflf
And
∈
=
otherwise 0
arg 1
usedthat isncyest frequeltheis Dfifuf
Then the objective (3.7) can be replaced by
min )(∑∈
−Df
ff luf
and the constraints (3.10)-(3.12) have to be replaced by
∑∈
=Df
fl 1
∑∈
=Df
fu 1
xvf + lg ≤ 1 gfDgfVv v <∈∈∀ ,,,
xvf + ug ≤ 1 gfDgfVv v >∈∈∀ ,,,
57
2
6 7
3 2 4 2 5
8 2 9 10
13 14 16 17
19 20 321 2
8 25
15 18
8 2 8 2 8
52 2 77 28
15 57 28
10 13 8 2
1 1 1 2 2 2
1 2 2 3
1 2 1 2 1 1
1 1 2 2 2 1
1 1 2 2 2 1
1 1 1 2 1 1
1 1 1 2 1
1 1 22 2 5
1 1 1 2 1 1
1 1 2 2 2 1
1 1 2 2 2 1
1 1 1 2 1
1 1 2

In case Dv = D for all v ∈ V and D consist of consecutive numbers, minimization of the
span is equal to minimization of the maximum frequency used. So, in that case the zmin
variable (or lf variable) can be deliberately left out of the formulation.
BENCHMARK INSTANCESTo test the proposed algorithms, several benchmark instances are present. Philadelphia
instances was introduced by Anderson in 1973 [115]. The original instance and certain
other variants of it are widely used afterwards to verify algorithms and lower bounds for
the MS-CAP. The Philadelphia instances have 21 hexagons denoting the cells of a
cellular network around Philadelphia (see Fig. 3.1). For each cell, a demand cv is given.
Fig. 3.2 shows the actual demand for the original instance P1.
Fig. 3.1: Network Structure
Fig. 3.2: Instance P1
In compliance with [34], the instances are denoted by P1-P9. Some of them are also
allotted as E3-E9 in [165]. In the basic model, co-channel reuse distance d is used to
58
1 2
6 7
3 2 4 2 5
8 2 9 10 11 12
13 14 16 17 18
19 20 321 2
15 8 25
15 18
8 2 8 2 8
52 2 77 28 13 15
31 15 36 57 28 8
10 13 8 2
1 1 1 2 2 2
1 2 2 3
1 2 1 2 1 1
1 1 2 2 2 1
1 1 2 2 2 1
1 1 1 2 1 1
1 1 1 2 1
1 1 22 2 5
1 1 1 2 1 1
1 1 2 2 2 1
1 1 2 2 2 1
1 1 1 2 1
1 1 2

represent interference, and no interference occurs if the distance between centers of two
cells is ≥ d. If the mutual distance is less than d, then it is not allowed to allocate the same
frequency to both the cells. This co-channel case is generalized by forbidden sets T0 ⊆ . .
. ⊆ Tk and replacing the reuse distance d with a series of non-increasing values d0,..., dk.
The following relation holds:
Tvw = Tj-1 whenever dj ≤ dvw < dj-1, j ∈ {1,…..,k}
where dvw is the distance between the two cell centers. The sets Tj are taken as Tj = {0, . . .
,j} for the Philadelphia instances. For instance P1 the values d0,...,dk are 2 3 , 3 ,1, 1,
1,0. So, frequencies allocated to the same site should be at a distance of at least 4 other
frequencies, whereas frequencies allocated to adjacent sites should be separated by at
least 2, and frequencies allocated to a second and third 'ring' of cells should also differ
(see Fig. 3.3). The domains Dv are simply Z+, in which minimization of the span is equal
to the minimization of the maximum frequency used, and there is a difference of one
between minimum span and maximum frequency used.
(a) P1, P3, P5, P7, P9 (b) P2, P4, P6
Fig. 3.3: Philadelphia Instances
A second set of benchmark instances are available via the CALM A project [60].
3.5.1 Lower Bounds and Exact Methods
59
1 1 1 2 2 2
1 1 2 2 3 2 1 1
1 2 1 2 1 1
1 1 2 2 2 1 1
1 1 2 2 2 1 1
1 1 1 2 1 1
1 1 1 2 1
1 1 2
1 2 2 5 2 1
1 1 1 2 1 1
1 1 2 2 2 1 1
1 1 2 2 2 1 1
1 1 1 2 1 1
1 1 2

A lot of research has already been dedicated to lower bounds on the span for the
Philadelphia instances. Gamst presented the first lower bounds for the MS-CAP, with Tvw
= {0,...,k} for some k ∈ Z+, and Dv = Z+, and applied several lower bounds based on
graph theory to instance P1 [3]. The clique bound is the most important bound of Gamst.
Here the vertices S ⊆ V form a clique in the graph G. Tmin, = min{v, w}∈E[s] |Tvw| (with Tvw
is a set of consecutive values). Then the span of any allocation sp(G) ≥ Tmin(∑ ∈−
SvvC 1)
and two more sophisticated bounds are also given. Even though, Gamst only calculated
the lower bounds for P1.
Only few researchers have succeeded in finding better bounds. Janssen and Kilakos
obtained the best bounds, from a polyhedral point of view in the study of minimum span
problem [82], [83]. The traveling salesman problem (TSP) on an associated graph G’ can
be seen as a MS-CAP, i.e. each lower bound for TSP is a lower bound for the MS-CAP
as well. The relation between MS-CAP and TSP was first discovered by Raychaudhuri
[8], and used by Roberts [64] and Smith et al. [49]. They proposed that if G’ be a
weighted complete graph with same vertex set G. The weights jivvw = 0 if {vi, vj} ∉ E,
and jivvw = jivvT + 1 if {vi, vj} ∈ E. H(G’) is the length of shortest Hamiltonian path in
G’, which leads to sp(G) ≥ (G’). Since, the lower bound for the shortest Hamiltonian path
is a minimum spanning tree S(G’), it also holds that sp(G) ≥ S(G’). Janssen and Kilakos
changed the TSP to edge cover polytope and studied the polyhedral structure of this
problem. They also studied the polyhedral structure of the TSP linear programming. For
the studied Philadelphia problem, (P1), a lower bound equal to 426 was also proved.
Shared with an upper bound i.e. 426, this means that the problem is solved [82]. Janssen
et. al. in [84], also examined the polyhedral structure of tile covers formulation for the
MS-CAP.
Smith et al. [49] presented lower bounds based on preprocessing ideas and subgraphs.
Every lower bound on a subgraph of G gives a lower bound on the span of G.
Preprocessing ideas include the removal of vertices with the same neighborhood, and the
removal of vertices can confirm that there is always an allocation achievable within the
lower bound of frequency spectrum. Recently, new lower bounds were computed by
60

Allen et al. using integer programming techniques [169]. They expanded the integer
programming technique for the Hamiltonian path problem, with extra variables and
constraints that represent the MI-CAP. Applications of integer programming techniques,
e.g. Lagrangean relaxation and branch-and-bound improved the lower bounds for small
instances.
New lower bound for the MS-CAP was presented by Sung et al., and based on related
arguments as the bounds of Gamst [37]. The lower bound is as powerful as the TSP
bound for most of the instances. Tcha et al. extended one of the lower bounds proposed
by Gamst [51] [3]. On an alternate instance P1, they also proved that the new lower
bound can certainly improve the lower bound proposed by Gamst.
For the CALMA instances, researchers used the same methods as for the MO-CAP. The
clique lower bound techniques were applied by Hurkens et al. [36], whereas Aardal et al.
[107] used branch-and-cut based techniques on CELAR 05 instance. It turned out from
the analysis that CALMA instances are fairly simple to solve to optimality. In fact, Kolen
et al. [14] reported the optimality results for all instances through constraint satisfaction
techniques.
Giortzis et al. [11] studied the same formulations (3.7)-(3.15) and applied branch-and-
bound along with a branching priority rule on an instances using 58 vertices (cv = 4) and
29 existing frequencies. According to them an optimal solution requires 16 frequencies.
3.5.2 Heuristics
The first heuristics for MS-CAP (e.g., Philadelphia instances) were proposed in 1970s.
Box and Zoellner et al. introduced the first useful heuristics [61] [88]. The frequencies
are allocated to the vertices based on some order of the vertices. Sivarajan et al. tested
numerous variants of the algorithm on 13 Philadelphia instances and some of the variants
found to be trivial [109]. None of the tested variants performed better than the other ones.
Smith et al. derived lower bounds are shared with a heuristic [43]. The heuristic first
allocate a subgraph in the graph, and then tries to expand the allocation to complete the
61

allocation with the same span. If such an allocation is not possible they expand the
subgraph with an extra vertex, and repeat the procedure. Optimal solutions are offered for
three Philadelphia instances. Hurley et al. described the FAsoft software system, which is
a frequency allocation planning tool based on these results [165]. They also described
several sequential allocation algorithms (like those by Sivarajan et al. [109], as well as
genetic algorithms (GA), tabu search (TS), and simulated annealing (SA)). Valenzuela et
al. applied genetic algorithms to these instances [34]. An allocation is obtained by
allocating frequencies to the vertices of a graph in a greedy way according to the decided
permutation. They applied the algorithm on the Philadelphia instances (P1-P8) and the
optimal solution was found.
Besides lower bound, a heuristic was also described by Sung et al. that provides an
optimal solution in a particular case [37]. They proved that sequential packing algorithm
proposed by them provides an optimal span if only co-channel constraints are considered,
and the hexagonal cell network contains at the most 3 stripes, i.e., represented by only 3
rows of hexagonal cells. The algorithm is generalized, if adjacent channel constraints are
considered. Two versions of the algorithm (GSP1 and GSP2), are applied on the
instances (P1-P4).
A local search method was discussed by Wang et al. for the MS-CAP. First the vertices
were allocated frequencies according to some order [193]. Next, the allocations of two
different vertices were exchanged till the objective improves. If no improvement is
possible anymore, non-deterioration is permitted to escape from local minima. The
algorithm was tested on two Philadelphia instances and on instances shown in Kim et al.
[166]. Kim et al. [166] introduced a two phase heuristic to find a solution of the minimum
span problem. They assumed a hexagonal grid and used patterns containing number of
cells to which same frequency can be allocated. The algorithm is applied on randomly
generated instances.
In the minimum span problem, the work of Lanfear should also be discussed [188]. In his
complete overview of frequency allocation, four algorithms for the MS-CAP were
proposed: an exact search algorithm i.e. branch-and-bound, tabu search algorithm, a
62

simulated annealing algorithm, and an algorithm based on vertex sequencing. The
simulated annealing algorithm can only be tested on instances with constraints limited to
co-channel and adjacent-channel interference (i.e., dvw ∈ {1, 2} for all {v, w} ∈ E).
For CALMA instances, all heuristics were performed uniformly, and found an optimal
solution. Tabu search was applied by Tiourine et al. [36], [170]. GENET and Tabu search
results were reported for CELAR 05 by Bouju et al. [1]. The potential reduction (PR)
scheme was used by Warners [90] to find a solution to both GRAPH 10 and CELAR 05.
Pasechnik [42] also used potential reduction scheme to solve the minimum span problems
and also the minimum order problems were solved as minimum span instances. For
GRAPH 01, the minimal span of 408 could only be provided, while lower and upper
bounds were also derived for the other instances.
3.6Minimum Blocking Channel Allocation Problem
If all allocations contain some undesirable interference, then a partial allocation that
minimizes the overall blocking probability must be found. In the minimum blocking
channel allocation problem (MB-CAP), the problem is to allocate frequencies in such a
way that no undesirable interference should occur and overall blocking probability is
minimized. Therefore, the problem was defined as [108]:
INSTANCE: Undirected graph G = (V, E ), {v, v} ∈ E, for all v ∈ V, sets Tvw ⊂ Z, {v, w}
∈ E, 0 ∈ Tvw, demand cv ∈ Z+, domain subsets Dv, ⊆ Z+ for all v ∈V, D = Uv∈VDv non-
increasing blocking function bv : Z0+ → Z0
+ for all v∈V, and positive integer K.
QUESTION: Does there present an allocation of subsets f : V → 2D such that,
(i) )(vf = cv,
(ii) F(v) ⊆ Dv,
(iii) ∉− gf Tvw for all {v, w} ∈ E, f ∈ f(v), g ∈ f(w), v ≠ w or f ≠ g , and
(iv) ∑ ∈ ≤Vv
Kvfb )(( ?
The special case in which cv = 1, & bv(0) = 1, bv(1) = 0, | Dv | = 1, Dv = Dw for all v, w∈
V, and Tvw = {0} for all {v, w}∈ E , is equal to the maximum independent set problem. As
63

a result, MB-CAP is NP-complete in general. An integer programming formulation with
nonlinear objective for this problem is:
min ∑∈Vv
vv mb )( (3.16)
mv = v
v
vf cDf
x ≤∑∈
Vv ∈∀ (3.17)
xvf + xwg ≤ 1 { } wv Dg DfEwv , , , ∈∈∈∀
( ) ( ) ( )( )wvgfTgf vw - ≠∨≠∧∈ (3.18)
xvf ∈ {0, 1} Vv ∈∀ , f ∈ Dv (3.19)
The constraints (3.17) show that maximum of cv frequencies should be assigned to v ∈ V.
The value mv is used only to simplify the objective (3.16), which minimizes the overall
blocking probability. The objective (3.16) is a generalized version of the Chang et al.
[108]. They modeled the MB-CAP as a non-linear combinatorial optimization problem.
Their objective function actually represents the blocking probability. In compliance with
Chang et al., let λv, be the traffic demand for cell v in Erlang, and mv the number of
allocated channels. Then for a cell v the blocking probability is given by the Erlang B
formula as
B(λv, mv) = ( ) ( )!
0!
1
v
vvv v
m
mm
kk
k
=
−
∑λλ
The average weighted blocking probability for a vertex v is given by
bv(mv) = wv B(λv, mv)
with wv = λv / ∑ ∈Vvvλ the traffic weighting factor. Since, the function B(λv, mv) is
strictly decreasing and convex in mv, and the objective function can be linearized by the
introduction of coefficients αvm= B(λv, m) - B(λv, m - 1) < 0, and the binary variables yvm
denoting
64

∈≤
=otherwise
Vvgned tos are assifrequenciecmleastatify
vvm
0
1
Then, the objective (3.16) reads
min ∑ ∑∈ =
+
Vv
c
m
vmvmv
v
yw1
1 α (3.20)
and the constraint (3.17) reads
1m
∑∑∈=
≤=v
v
Df
vvf
c
vm cxy Vv ∈∀ (3.21)
Note that, yvm = 1 implies yvm-1 = 1, since the function B(λv, mv) is strictly convex, which
implies that αvm strictly increases over m.
Mathar et al. [160] used the same objective. The objective is then simplified to bv(m) =
cv-m, i.e., the unfulfilled demand is minimized, or equally the number of allocated
frequencies is maximized. Therefore, MB-CAP is also called the maximum service
frequency allocation problem.
3.6.1 Lower Bounds and Exact Methods
Chang et al. first linearize (3.16) to (3.20) [108]. Next, a number of patterns are generated
(i.e., a pair (S, f), subset S ⊂ V and a frequency f ∈ D, which can be allocated without
any interference to all the vertices v ∈ S simultaneously). Then, the problem can be
remodeled and Lagrangean Relaxation is implemented on the new formulation.
Furthermore, a grade-of-service (GoS) is described as updating heuristic and their
algorithm was tested on randomly generated instances using a 7 x 7 hexagonal grid
network.
In addition of using co-channel and adjacent-channel interference constraints, represented
by (3.18), Fischetti et al. [124] also kept in mind that the overall interference has to be
limited to a value L,
)1( vf
Vu Dg
ugvufg xMLxpu
−+≤∑ ∑∈ ∈
vDfVv ∈∈∀ , (3.22)
65

where pvufg is the interference level of combination (v, f) and (u, g), and M is a constant
with respect to interference levels. If frequency f ∈ Dv is selected, the total interference
level should be below L, and if f ∈ Dv is not selected, then the constraint is redundant.
The value L represents the signal-to-noise ratio. Fischetti [124] considered only co-
channel and adjacent-channel interference for finding a solution to MB-CAP. Ivu > 0
represent the actual interference level with the use of same frequency for v and u, and
NFD is the Net Filter Discriminator, which is a decreasing factor for adjacent
frequencies. Then (3.22) is reduced to
∑∈
−+≤
+−+
Vu
vfufufvu
ufvu xMLxxNFD
IxI )1()1( vDfVv ∈∈∀ , (3.23)
Fischetti [124] solved the problem with Branch and Cut. Their instances are acquired
from CSELT (a research laboratory associated with TIM, Italian mobile radio managers)
and include up to 203 vertices. Not all the instances can be solved to optimality. The
same instances have also been examined by Mannino et al. [33] and an enumeration
scheme was presented, within the situation of a core search. The core of the problem was
allocated first, and afterwards extends the allocation to the complete problem, without
extra interference. Their algorithm performs better both in optimality and time, than the
Branch and Cut method of Fischetti et al. on all the instances. Mannino [33] also tested
the core search algorithm on numerous instances from TIM. The overall interference
(3.22) is not taken into consideration in these instances.
The problem of minimizing the unfulfilled demand was also examined by Jaumard et al.
[23] (see also [24], [25]). In addition the demand cv, they also considered a minimum
number of required frequencies c-v, resulting in the extra constraint
∑∈
−≥vDf
vvf cx Vv ∈∀ (3.24)
Three different integer programming formulations were compared, one equivalent to
(3.16)-(3.19) and the formulation of Mehrotra et al. [6] for the graph coloring problem,
66

and two set-covering formulations. The formulations were compared with respect to the
quality of the linear programming relaxation. For the better formulation (one of the set
covering formulations), the integrality gap remains important. The column generation
technique is used to solve the linear programming relaxation, and presented proficient
branching scheme, which is to be used within a framework of branch and cut.
Giortzis et al. [11] solved five instances with minimum of 4 and maximum of 58 vertices
and in between 5 and 29 existing frequencies, with standard branch-and-bound algorithm.
To improve the performance of the algorithm, specialized branching priority was applied
on the variables xvf.
Finally, the MB-CAP was also examined by Kazantzakis et al. [129] and Rouskas et al.
[12]. An integer linear programming formulation was presented, which was similar to
(3.16)-(3.19) for the problem. They solved the linear programming relaxation and added
inequalities for the objective values to be integral. However, if the objective value is
integral, the solution can be fractional. The search for an integral solution is performed
through thorough search of the solution space of program describing all integral solutions
with the specified objective value. Computational results are informed on a small test
problem.
3.6.2 Heuristics
Only one heuristic approach is known for the MB-FAP. Mathar and Mattfeldt [160]
applied simulated annealing to the MB-FAP with the same objective as Chang and Kim
[108]. They only took into account the co-channel interference. The quality of their
solutions is examined through the use of special network structures for which optimal
solutions can be computed efficiently.
3.7Minimum Interference Channel Allocation Problem
In addition to the schemes that minimize the maximum interference level, another
approach is specified which minimize the total sum of interference levels. In the
minimum interference channel allocation problem (MI-CAP), limited number of
67

available frequencies is allocated in such a way to minimize the total sum of interference.
The problem can be defined as
INSTANCE: Undirected graph G = (V, E ), {v, v} ∈ E, for all v ∈ V, sets Tvw ⊂ Z, {v, w}
∈ E, 0 ∈ Tvw, demand cv ∈ Z+, domain subsets Dv, ⊆ Z+ for all v ∈V, D = Uv∈VDv
penalty values pvwfg ∈ Z+, for all {v, w}∈ E, f ∈ Dv, g ∈ Dw, and positive integer K.
QUESTION: Does there present an allocation of subsets f : V → 2D such that,
(i) )(vf = cv,
(ii) F(v) ⊆ Dv, and
(iii) ( )∑ ∑
∈≠∨≠∈∈
≤∈−Ewv
gfwvwggvff
vwgfvw KTgfp},{
)()()(),(
?δ
Here, δ (A) is the Kronecker delta function, δ (A) equal to one if logical condition A is
true and otherwise its value is zero.
In several cases, the MI-CAP is used to find the minimum span of a CAP. In this
particular case, it is required to find an interference-free allocation to the vertices, i.e., if
K = 0. This problem is also recognized as feasibility frequency allocation problem.
FEASIBILITY CHANNEL ALLOCATION:
INSTANCE: Undirected graph G = (V, E ), {v, v} ∈ E, for all v ∈ V, sets Tvw ⊂ Z, {v, w}
∈ E, 0 ∈ Tvw, demand cv ∈ Z+, domain subsets Dv, ⊆ Z+ for all v ∈V, D = Uv∈VDv.
QUESTION: Does there present an allocation of subsets f : V → 2D such that
(i) )(vf = cv,
(ii) F(v) ⊆ Dv, and
(iii) ? ),(),(,},{ gforwvwfgvffEwvallforTgf vw ≠≠∈∈∈∉−
An integer programming formulation for MI-CAP can be specified by introducing new
binary variables zvfwg, for all {v, w} ∈ E , f ∈ Dv, g ∈ Dw, with | f - g| ∈ Tvw, and either v ≠
w or f ≠ g:
==
=otherwise
xandxbothifz
wgvfvwfg
0
1 1 1
68

Then MI-FAP reads
∑ ∑∈
≠∨≠∧∈−∈∈Ewv
gfwvTgfDgDf
vwfgvwfg
vw
wv
zp},{
)(,
min(3.25)
s.t. ∑∈
=vDf
vvf cx Vv ∈∀ (3.26)
xvf + xwg ≤ 1 + zvwfg ∀ {v, w}∈ E, f ∈ Dv, g ∈ Dw
( ) ( ) ( )( )wvgfTgf vw ≠∨≠∧∈− (3.27)
xvf ∈ {0, 1} ∀ v∈V, f ∈ Dv (3.28)zvwfg ∈ {0, 1} ∀ {v, w}∈ E, f ∈ Dv, g ∈ Dw
( ) ( ) ( )( )wvgfTgf vw ≠∨≠∧∈− (3.29)
Constraints (3.27) show that both f and g can be allocated to v and w if and only if zvwfg
equal to one, which express an extra penalty in the objective (3.25). Since we assume
pvwfg > 0, the z = 0 if only one of the x variables in (3.27) is set to 1. In case pvwfg < 0, the
constraints
zvwfg ≤ xvf ∀ {v, w}∈ E, f ∈ Dv, g ∈ Dw (3.30)( ) ( ) ( )( )wvgfTgf vw ≠∨≠∧∈− (3.31)
have to be added to the formulation.
Another way to express (3.27) is with the introduction of the variables zvwfg for all {u, w}
∈ E, f ∈ Dv, g ∈ Dw, and the constraints
∑∈
=wDg
vfwvwfg xcz ∀ {v, w}∈ E, f ∈ Dv (3.32)
In case xvf = 0, then the constraints (3.32) enforce that all the variables zvwfg are set to 0 as
well. In case xvf = 1, the constraints (3.32) guarantee that exactly cw, variables zvwfg are set
to 1; the variables zvwfg with xwg = 1.
69

Aardal et al. [107] presented an easy integer linear programming formulation for the case
cv is set to 1. They also assumed that the interference pvwfg is equal for all |f - g| ∈ Tvw.
Instead of zvfwg, a new binary variable zvw was introduced for every edge {v, w} ∈ E.
=otherwise
Tlate and w viocted for vncies selethe frequeifz
wgvw
0
1
∑∈Ewv
vwvwzp},{
min (3.33)
∑∈
=wDf
vfx 1 Vv ∈∀ (3.34)
xvf + xwg ≤ 1 + zvw ∀ {v, w}∈ E, f ∈ Dv, g ∈ Dw : ( )vwTgf ∈−(3.35)
xvf ∈ {0, 1} ∀ v∈V, f ∈ Dv (3.36)
zvwfg ∈ {0, 1} ∀ {v, w}∈ E (3.37)
3.7.1 Benchmark Instances
Eleven benchmark instances are available with the CALMA project. Both single and
combinations of frequency allocations are penalized in the instances (CELAR 09,
CELAR 10, GRAPH 07, and GRAPH 12). There exists a favorite frequency f* for a
number of vertices, which is not selected against a high penalty qv,. Universal preference
between frequencies may be represented with penalties qvf for all v∈V, f ∈ Dv. In that
case the objective (3.33) is
∑ ∑ ∑∈ ∈ ∈
+Ewv Vv Df
vfvfvwvw
v
xqzp},{
(3.38)
3.7.2 Lower Bounds and Exact Methods
Aardal et al. [107] implemented their Branch-and-Cut framework for MO-CAP, to solve
these instances. Unluckily, they failed to solve any of these instances. For two instances,
they got a non-trivial lower bound through this way. Tiourine et al. [36], [170] developed
70

a relaxation of the problem as a quadratic program. A branch-and-bound and
preprocessing algorithm is used to solve the quadratic program (QP). For two CELAR
instances having vertex penalties qvf they were successful to obtain somewhat good lower
bounds. In case of CELAR 06, for constraint optimization problems, De Givry et al.
[164] testified through lower bounding methods that the value of best known solution is
optimal. The verification of optimality was carried by Russian Doll Search algorithm in
[74] on a network of 40 SPARC 4 workstations.
3.7.3 Heuristics
Tiourine et al. [36], [170] implemented Variable Depth Search and Simulated Annealing
on the CELAR instances and got varying success. Warners [90], [92] and Pasechnik [42]
implemented their potential reduction method to MI-CAP without any big success.
Kapsalis et al. [42] proposed a standard genetic algorithm. A genetic algorithm using
optimized crossover was proposed by Kolen [15] to solve the MI-CAP. Instead of a
standard crossover, the crossover routine produces the finest feasible child of two parents.
To generate a child, we have to compute an MI-CAP with |Dv| = 2 for all v ∈ V. This
problem may be solved to optimality through the polyhedral results (see also [5]).
Implemented on the instances of CALMA project, the best results were gathered through
this way.
The instances of CALMA project are not the only problems that have encouraged
researchers to design algorithms for the MI-CAP. However, only CALMA instances can
be considered as benchmark problems, since for all other instances only a single group of
researchers have investigated them. Entire research on these instances has been
performed in the route of heuristic methods. Particularly, genetic algorithms and tabu
search appears to be very popular for the solving MI-CAP. Tabu Search is used by
Castelino et al. [53] to find an allocation with minimal unweighted interference, i.e., pvw,
= 1 for all {v, w} ∈ E. To check the results on large instances, the results were compared
with a Genetic Algorithms and a steepest descent heuristic. Computational results are
informed for instances having upto 75,306 edges and 726 vertices. In all the cases, the
available frequencies are 50. Castelino et al. [54], [55] applied tabu thresholding [63] on
71

the same instances and surrogate constraints [62] are appended to the tabu thresholding
method.
Tabu search was also used by Hao et al. [89] to calculate realistic instances for a network
(CNET) having 600 transmitters. The minimum interference problem was solved to
minimize the span of allocation. An allocation is described in such a way, so that all co-
site constraints are fulfilled. The length of the tabu-list varies during the search. Dorne et
al. [157], [158] implemented evolutionary search on a CNET instances having 300
vertices and cv ∈ {2,3,4}. They also want to minimize the span of allocation by solving
repeatedly MI-CAPs. A mutation operator was also used that focuses on the change of
contradictory frequencies, whereas Dome et al. compared different schemes to minimize
the co-site interference constraints [158]. The performance of crossover operator was also
investigated using genetic algorithm.
Several genetic algorithms are proposed by Crisan et al., Ngo et al., Kim et al.[30], [94],
[195]. Crisan et al. [30] applied a genetic algorithm to MI-CAP with mutation operators
and tailor-made crossover. Real-life instances were solved through this way with around
5500 transmitters. Lai et al. [195] presented a new genetic algorithm to find a solution of
minimum interference problem. Computational results are presented for 2 instances. Ngo
et al. [35] have also applied a genetic algorithm to solve MI-CAP. Special binary
encoding scheme was used by them to deal with the demand cv for all v ∈ V, and the co-
site interference constraints. Smith [104] presented another genetic algorithm as well. In
this case the adjacent and co-channel interference is reduced by a crossover, whereas the
co-site interference is reduced by mutation operator. According to Kim et al. [94]
interference free allocations are obtained by genetic algorithms. Several crossover and
mutation operators were tested by them for Philadelphia instances, where the span of
existing frequencies is set to the lower bound proposed by Gamst [3]. Sivrajan et al. [109]
introduced these instances and for 5 instances, interference-free allocation is present with
span equivalent to the lower bound.
72

In order to solve same instances, Funabiki et al. [140] proposed a neural network
approach. Hysterses McCulloch-Pitts neuron model was used to solve the feasibility
problem, instead of a Hopfield network. This neural network promises to converge to a
local optimum. With the use of some extra heuristics, they hoped that their method
converts to global optimum, which is true in large percentage of the cases. Kunz [56]
used the first neural network approach, and applied a Hopfield network to solve the
problem. Lochtie et al. [73], [72] also applied a neural network method to the MI-CAP.
Only co-channel interference constraint has been taken into consideration in [73],
whereas in [72] the computed results are extended to include adjacent channel
interference as well. Computed results are reported for an instance of a real-life having 58
cells. Smith et al. [106] used another neural network approach, and they demonstrated a
nonlinear integer programming formulation for the problem, and implemented both a
self-organized neural network and Hopfield network to the problem. Kunz [56] compared
the results with simulated annealing on a Philadelphia instances. As compared to the
standard MI-CAP, the interference depends on the distance between the frequencies, and
the difference between allocated frequencies is inversely proportional penalty.
Young [46] applied the same cost function, and demonstrated a local search framework.
A local search method is also implemented by Park et al. [189]. They changed a local
search method for the fc-coloring problem to the feasibility CAP. As neighborhood they
applied color changing (other color for same vertex) and color interchange (swapping two
colors of two vertices). Yet again the feasibility problem is solved to minimize in the
span. Smith et al. [105] described a simulated annealing approach, implemented on a
point-to-point wireless network.
Finally, Borndorfer et al. [155] extended the graph coloring problem of Brelaz [47] and
Costa [59] to the MI-CAP to solve problem instances of size around 4,240 vertices.
DSATUR heuristic produced the best results when combined with local search. Their
algorithm was compared with an algorithm based on a minimum cost flow and T-
coloring heuristics. This last heuristic was also discussed by Borndorfer et al. [156], and
presented an orientation model for the CAP. This actually becomes the foundation for a
two stage heuristic in which outer and inner optimization problems are solved iteratively.
73

The outer optimization problem decides for each edge in the graph which adjacent vertex
is assigned the higher frequency (orientation). The inner optimization problem is to find
an assignment that respects the orientation. The inner optimization problem can be
viewed as a minimum cost flow problem.
3.8 Dynamic Channel Allocation
The allocation of channels to cells discussed so far has been based on fixed channel
allocation (FCA): groups of channels are permanently allocated to given cells according
to certain reuse pattern. Dynamic Channel Allocation (DCA) refers to a variety of
schemes in which channels are allocated to users in a cell according to varying traffic
demands [27]. The two types of DCA schemes are centralized and distributed. In
Centralized DCA, all the available channels are kept in a single central pool from where
the central computer allocates channels to different cells on demand, and the cells return
the channels to the central pool when the call is finished. In the distributed dynamic
channel allocation (DDCA) scheme, the available channels are divided into multiple
equal size groups. Any cell in the cluster can obtain the channel group if one of its
adjacent cells is not holding the same group. The same channel group can be used by the
two base stations if the distance between these two base stations is more than the
minimum reuse distance. In this scheme each base station keeps the storage information
table which stores information about the channels that are presently used by the cell as
well as by neighboring cells.
The option of using DCA for improving system capacity of cellular systems was
proposed by Cox et al. [41]. Many algorithms have been proposed for DCA so far and
each algorithm has its special attributes, whether it is ease of use or enhanced system
performance under traffic overload. Overload refers to the traffic load greater than the
traffic intensity for which the system has supposedly been designed. This might be due to
a huge number of users than anticipated. When the traffic load on the network goes above
certain value, the call blocking and dropping probability increase. A channel allocation
scheme is said to be better than the other if its blocking-probability is low as compared to
the other.
74

Katzela and Naghshineh [80] gave an overview of DCA and proposed various algorithms
using qualitative comparisons, and DCA added flexibility to the entire process of channel
allocation. Different DCA schemes vary in the channel allocations rules and the results
have shown that all DCA schemes perform better than FCA under low and moderate
traffic loads. At heavy loads, FCA performs better since, at these traffic loads, very few
radio channels are normally found free for allocation to a new calls. In addition, when
channel locking was later introduced in DCA, it worsened the situation, so leading to
performance going down.
While implementing DCA, a cell can borrow channels when required, from neighboring
cells. But when the channels are borrowed, other cells are locked from utilizing these
channels due to reuse constraints. Channel borrowing from neighbors in DCA, therefore,
give rise to locking of channel. Under moderate traffic loads, this present no problem and
DCA can adapt to traffic fluctuations from cell to cell. In heavy traffic load, channel
locking forced cells in the network to borrow even more, which ultimately brings down
the performance somewhat, rather than improving it. Channel locking can be described
by reference to Fig. 3.4, in which channels are allocated to seven cells of each cluster as
shown. Neighboring cells cannot reuse the same channels, but may be reused one step
further away. In Fig 3.4, implementation of a DCA scheme is shown, in which cell 1
borrows a channel c1 from cell 7. Then channel c1 is locked, and is not allowed to be
reused in the neighboring cell 1, as well as cells 7’’ and 7’’’ and even it cannot be reused
by cells in the neighborhood of 7’’ and 7’’’ as well. This problem is called channel-
locking problem, which brings down the performance of DCA under heavy loads, due to
reuse restrictions.
This simple borrowing scheme was very strict, and directional locking strategy was later
introduced to improve some of this problem. Referring to the Fig. 3.4 again, the cells 2’
and 1’ on the faraway side of cell 7’, away from cell 1, can borrow channel x from cell 7’
without violating the reuse constraints. In fact, the use of directional locking improves the
performance of DCA significantly.
75
i- 1

Katzela et al. [80], proposed a variety of DCA schemes. These include different channel
allocation rules; strategies of selecting favorite cells for borrowing a channel; allocation
of radio channels to individual cells, with the remaining of the channels kept in the pool
to be allocated when required; using different borrowing schemes for the inner and outer
areas of cell, etc. The BDCL DCA scheme proposed by Zhang et al. [215] proposed a
borrowing with directional channel locking (BDCL) scheme.
Fig. 3.4: Channel Locking
The entire scheme is explained by using three specific features: channel ordering, specify
locking directions, and instant channel reallocation. In channel ordering scheme, different
channels allocated to various cells are numbered. The lowest-numbered channel is given
the highest priority to be allocated to the next call. On the other hand, top priority is
assigned to highest-numbered radio channel to be borrowed by cells present in
neighborhood. Local calls are then allocated channels in order starting from the lowest-
numbered channel; allocating of borrowed channels start with the highest number
channels. Local calls used Immediate channel reallocation, a scheme proposed to pack
channels nearly together; borrowed channels are also packed together. This feature is
comprised of following parts:
76
i- 1
2'
7
2
3
7
1'
3'
6
1
4
6
5"
4'
5
7"
2"'
3"
7" 3" 1"'
1" 6" 4"
6" 4" 5"'
5"
2"
X

i) Packing of local calls: when a call on a lower channel ends and there is an ongoing
on a higher channel, the ongoing call is then shifted to the free lower channel.
ii) When a locally generated call utilizing a locally allocated nominal channel ends
and there is another ongoing locally generated call using borrowed channel, the
latter is then shifted to the nominal channel.
iii) When a call using a borrowed channel terminates, the borrowed channel is then
released, and there ongoing call utilizing a borrowed-channel of lower-numbered
channel, the ongoing call is then moved to the higher numbered channel.
iv) In an interfering cell, when a channel gets unlocked with the termination of a call,
every call on a higher-order channel or borrowed channel is moved to this
channel.
According to Zhang et al. [215], this DCA scheme shows better results as compared to
FCA under moderate loads.
Yeung et al. [213] proposed an approach on a one-dimensional version of above
mentioned scheme, and showed how performance analysis was carried out. If there are a
2m channels present in the system and m channels are allocated to alternate cells. The
first set of m channels are called the a set, and the remaining channels is called the b set.
Fig. 3.5 shows the allocation of the whole one-dimensional set to cells i − 1, i, and i+1.
Suppose, all the m channels in a particular cell i are busy. The new call arrival will be
blocked in this case, if FCA strategy is used. With DCA, if a channel is available, it may
be borrowed either from i − 1 or from i + 1 by i. But If a channel is borrowed from i − 1
(i + 1), the same channel in i + 1 (i − 1) is then locked. Under this scheme using
directional locking, call blocking in cell i happen if all the 2m channels are in use. Then, a
cell i cannot borrow a channel from neighboring cells, even if free channel is available,
since that channel might be in use in the some other neighboring cell.
77
bb a
i i- 1 i - 1

Fig. 3.5: Channel Allocation in One-dimensional Cellular System
The analysis of this strategy on three cell system and comparison with FCA was
performed by Yeung [213]. The succeeding examination of three-cell system is then
generated a tight upper bound.
This observation was developed by Yeung [213] as follows: For example, One or more
channels are lent by a cell i to its neighbors. It may either borrow or not borrow channels
from its neighbors. Suppose, k channels are lent by cell i to cell i + 1, numbered from m -
k + 1 to m. The cell i + 1 already had m calls, and thus has m + k ongoing calls. If a call
arrives in cell i, there are two possibilities: i) the number of ongoing calls in cell i is less
than m – k, therefore, i may be able to handle the call directly. ii) the cell i has m − k
ongoing calls. In this case, cells i and i + 1 have occupied 2m channels. Therefore, a
channel cannot be borrowed from cell i - 1 by cell i, so the new call is blocked.
Borrowing of channels fails to spread because of this analysis. Thus, the calculation of
blocking probability for three-cell group might be performed by dissociating the group
from the remaining one-dimensional network and handling it separately.
L. Sun et al. [185] presented an integrated artificial intelligence based optimized cellular
radio channel allocation algorithm. The new scheme contains Genetic Algorithm based
channel allocation method, and is compared with both conventional and random channel
allocation methods. The results have presented 30% improvements in signal to noise ratio
and 80% less calls get dropped while using this new method
A cost function based Dynamic Channel Allocation scheme was proposed by M. Bublin
et al. [29] but this scheme has performed well under certain specified loads and for
certain services. This scheme has special cases used minimum interfernce, reuse
partitioning to evaluate the performance. The results have shown that this scheme has
performed substantially better than the other scheme with low computational overhead
and signalization.
78

Azzedine Boukerche et al. [20] reviewed various distributed dynamic channel allocation
algorithms based on mutual exclusion. The first three algorithms were based on co-
channel interference, whereas the fourth algorithm used co-group interference method.
Experiments of these four algorithms were conducted on realistic scenarios and the
results have shown that fourth algorithm gave highest blocking rate and lowest response
time.
Shengming Jiang et al [178] investigated different channel allocation schemes, which
were used in distributed timid dynamic channel allocation with seamless handoff policy
(DCA-DT/SLH), channel carrying first (CCF) and channel carrying last (CCL). The
study has shown that CCL generally outperforms CCF, and DCA-DT/SLH without
channel carrying, handoff calls might show higher call dropping if no priority is given to
handoff calls while such undesirable situations can easily be avoided by channel carrying.
While channel carrying in DCA-DT/SLH performs better than the guard channel (GC) in
FCA and can also slightly improve the performance of GC in DCA-DT/SLH.
Jianchang Yang et.al. [99] presented a fault-tolerant channel allocation algorithm for
cellular network with mobile base stations and studied scheduling algorithms exploiting
the multi-user selection diversity. The channel dynamics were also taken into
consideration using a novel approach based on the level-crossing analysis of stochastic
processes. Then, a connection is made between the Doppler frequency shift, which
indicates the channel temporal correlation, and the average (channel) access time, the
average waiting time between accesses, and the average access rate of active users. These
properties are important for the scheduler design, especially for applications where delay
is a concern. In addition, analytical expressions for the system throughput and the degree
of fairness when users have non-identical average channel conditions are presented.
These expressions quantify the effect of disparateness in users' average channel
conditions on the system performance.
3.9Hybrid Channel Allocation (HCA)
79

HCA schemes are a combination of FCA and DCA schemes, with the traffic channels
divided into fixed and dynamic sets. This means that each cell is given a fixed number of
channels that is exclusively used by the cell. A request for a channel from the dynamic
set is initiated only when a cell has exhausted using all channels in the fixed set. A
channel from the dynamic set can be selected by employing any of the DCA schemes.
The real question is what should be the ratio between the number of fixed and dynamic
channels. The value of the optimal ratio depends on traffic characteristics, and it may be
desirable to vary this value as per estimates of instantaneous load distributions. It has
been observed that for a fixed to dynamic channel ratio of 3:1, the hybrid allocation leads
to better service than the fixed scheme for traffic up to 50%; beyond that load, fixed
schemes perform better. Doing a similar comparison with dynamic schemes, when the
load varies from 15% to 40%, the corresponding best values vary from most to medium
to no dynamic channels. A lot of computation time is required if simulation is to
determine the behavior of a large system, and an analytical approach is desirable.
However, exact analytical models are much more difficult to define for hybrid schemes,
and if data traffic also needs to be incorporated, it is almost impossible to have even an
approximate model.
Farid et al. [66] proposed a new hybrid channel allocation scheme using a distributed
power control for wireless cellular networks. In this scheme, a multi-objective evolution
strategy was devised that actually combines the optimizations of channel allocation and
power control, but a substantial increase in the capacity of the network was witnessed
with the implementation of this scheme.
Joshi et al. [102] tried to reduce the call blocking probability by designing a new hybrid
channel allocation algorithm using a hotspot notification technique. In this scheme, a cell
becomes hotspot when the number of channels present in that cell is not enough to meet
the demand and the call will be either blocked or dropped. In order to minimize the call
blocking or dropping, all the dynamic channels are kept in a central pool, and more then
one channels be allocated to the requesting cell, proportional to the present hotspot level
80

of the cell. The simulation results have shown that the call blocking and dropping rates
are largely reduced.
Helonde et al. [77] presented a new Integer Linear Programming (ILP) technique for
efficient allocation of radio channels to the new calls in order to increase the system
capacity. The ILP formulation was proposed only to satisfy the new calls and no effort
was made for the reassignment of the existing calls. So, this system brings down only the
call blocking rate to quite an extent.
An analytical method for calculating the blocking probability, probability of handoff
failure, probability of forced call termination was developed by Ortigoza et al. [148].
They also suggested a new prioritized handoff dynamic channel allocation scheme. In
this scheme, a modified form of DCA algorithm called compact pattern with maximized
channel borrowing (CPMCB) is presented. These modifications in DCA lead service
providers either to a reduction in infrastructure or to an increase in capacity and grade of
service.
Shirazi [180] gave a new technique in which channel allocations to the new as well as to
the handoff calls in a cellular network is done after satisfying co-channel, adjacent
channel and co-site constraints so that required bandwidth is minimized. A new algorithm
for solving CAP was presented, and Node-color, Node-degree ordering of cells, Row-
wise and Column-wise ordering of calls, and local search are used for finding a solution.
The results have given better solution than the other scheme available in the literature.
3.10 Introduction to an Agent
Different definitions from diverse disciplines have been proposed for the word agent, but
there is no universally accepted definition available for the agent, so, that is why there is
a lot of ongoing debate and controversy on this subject [98], [203]. What agents are
competent of doing has been generally agreed, but people are finding it very difficult to
give a universally accepted definition that is more exact.
81

According to Ferber [67], an agent is an entity (physical or abstract) that can act in its
environment, and directs its activity towards achieving goals. This entity has an
incomplete representation of the environment and be able to communicate with other
agents. The behavior state of the agent is determined through its knowledge, perception,
and its interaction with other agents. Autonomous or independent agents are
computational systems that reside in complex dynamic environment, sense and act
independently in that environment, and by doing this, agents achieve a set of goals or
tasks for which they are created. Jennings [98] stated one of the most widely used
definition: an agent is a computer system that is located in some environment, and is
capable of flexible and autonomous actions in this environment in order to meet its
design objectives. Flexibility means that the system should be social, proactive, and
responsive.
Ferber [70] gave a common definition of an agent:
An agent is a physical or virtual entity
a. which is competent of acting in an environment,
b. which can communicate openly with other agents,
c. which is driven by a set of goals,
d. which have its own resources,
e. which is capable to comprehend its environment,
f. which has only an incomplete representation of its environment,
g. which has skills and can offer services,
h. which may be able to replicate itself,
i. whose behavior runs towards fulfilling the objectives, by taking into account the
resources and skills currently available to it and depending upon its perception of
the environment, its representation, and the communication it receives from other
agents.
Various definitions of the agents given in the literature identified several key properties
that differentiate an intelligent agent ([116], [200], [201], [203]): These key properties
are:
82

• Autonomy: The agents function without the direct involvement of humans or
others, but have some sort of direct control over their actions and internal state
using a set of tendencies. The tendencies are personal goals to be accomplished by
the agent.
• Social ability: Different agents collaborate, delegate, communicate, and negotiate
with other agents.
• Reactivity: The agents perceive their environment, and react to changes in a
timely fashion that occur in it, in order to suit their design objectives.
• Pro-activeness: The agents do not just react in response to the environment; they
are intelligent enough to show goal-directed performance by taking the initiative.
Agents are able to handle complex and high-level tasks. The decision as to how
these tasks are best divided into smaller sub-tasks, and the order, in which these
sub-tasks are best executed, should be made by the agent itself.
• Temporal continuity: Various agents are continuously running processes
• Mobility: an agent has the capability to move itself from one computer to
another, keeping its current state.
• Learning: All the agents have the ability to learn and adapt themselves in order to
fit their environment.
The top level view of the agent is shown in the Fig. 3.6. In this diagram, the agent
generates action output in order to influence its environment. In most of the domains
having moderate complexity, an agent will not have full control but would only have
partial control over its environment, so that it can influence it. Therefore, the same
actions performed twice on the same situations might have completely different effects,
and especially agents might not be successful to have the desired effect. Hence, agents in
all environments should be ready for the possibility of failure.
83

The major problem faced by an agent is that of deciding about the actions it should
execute in order to meet the design objectives. Agent architectures are actually software
architectures for decision support systems (DSS) that are embedded into the environment.
The intricacy of the decision-making process in a decision support system can be affected
by various environmental properties. Russell et al. [168] proposed several classifications
of environment properties.
Fig. 3.6: An Agent in its Environment
They organized the agent environment according to the following properties:
• Accessible vs. inaccessible: If it is feasible to collect the complete information
about the agent’s environment in the moment, then the agent’s environment is
said to be accessible. Normally, only virtual environments are accessible to
agents, because all sensors provide biased and incomplete input. There are so
numerous probable percepts in the real world that it is not possible to read and
process them in real time. In fully accessible agent’s environments, it is not
84
ENVIRONMENT
AGENT
action output

required for the agents to create models in the memories, because it can acquire
any desirable information from the environment at any time.
• Deterministic vs. non-deterministic: if an action performed in the environment
made a distinct effect, the environment is to be deterministic. Distinct effect
means that any action by the agent that leads to the proposed and predictable
results and there is no scope for uncertainty. If the environment is not accessible
for the agent, it will be most likely non-deterministic, atleast from its point of
view.
• Static vs. dynamic: the environment is said to be static, when the agent is the only
entity whose actions changes the environment in the moment. If the state of the
environment is dependent on time, then it is dynamic. Normally, real
environments are dynamic in nature (e.g., traffic in a city) and few artificial
environments (e.g., turn based games) are static.
• Discrete vs. continuous: If the agent just has a definite set of possible actions (i.e.,
agent has number of possible) that it can perform in the moment, then the
environment is said to be discrete. Otherwise, if the agent has infinite options,
then the environment is continuous.
• Episodic vs. non-episodic: In episodic environment, the agent operates in discrete
segments (episodes) that are completely independent of each other. There is no
link between agent's state in one segment and its state in another segment.
3.11 Agent Architectures
Based on the goals, a number of different agent architectures have been proposed [9]
[10].
3.11.1 Reactive Architectures
85

In order to permit good performance in dynamic environment, the reactive agent
architecture was proposed, where the deliberative agents fail to act upon. It is the simplest
architecture for agents. In this, the agent has no decision-taking capability, and it only
reacts to the environment in which it exists. The agent behavior in this architecture is
only a mapping between stimulus and response. The reactive agent architectures are
divided into three sub-categories i.e., purely reactive, simple reactive planning, and
sophisticated reactive planning. Purely reactive agents take action without planning and
do not consist of a symbolic model of the world. The reactive planning technique
includes a symbolic model of the world and used reactive reasoning to choose between
different alternative plans at run-time. While in sophisticated reactive planners, agents
include more complex constructs to handle execution failures. Fig. 3.7 illustrates the
reactive architecture.
Fig. 3.7: Reactive Agent Architecture
As shown in Fig. 3.7, the agent only reads the environment and then one or more actions
are mapped with state of the environment. Given the environment, more than one action
may be suitable in a given environment, and therefore the agent must select the best one.
3.11.2 Deliberative Architectures
86
Environment
Sensors Actuators
Mapping
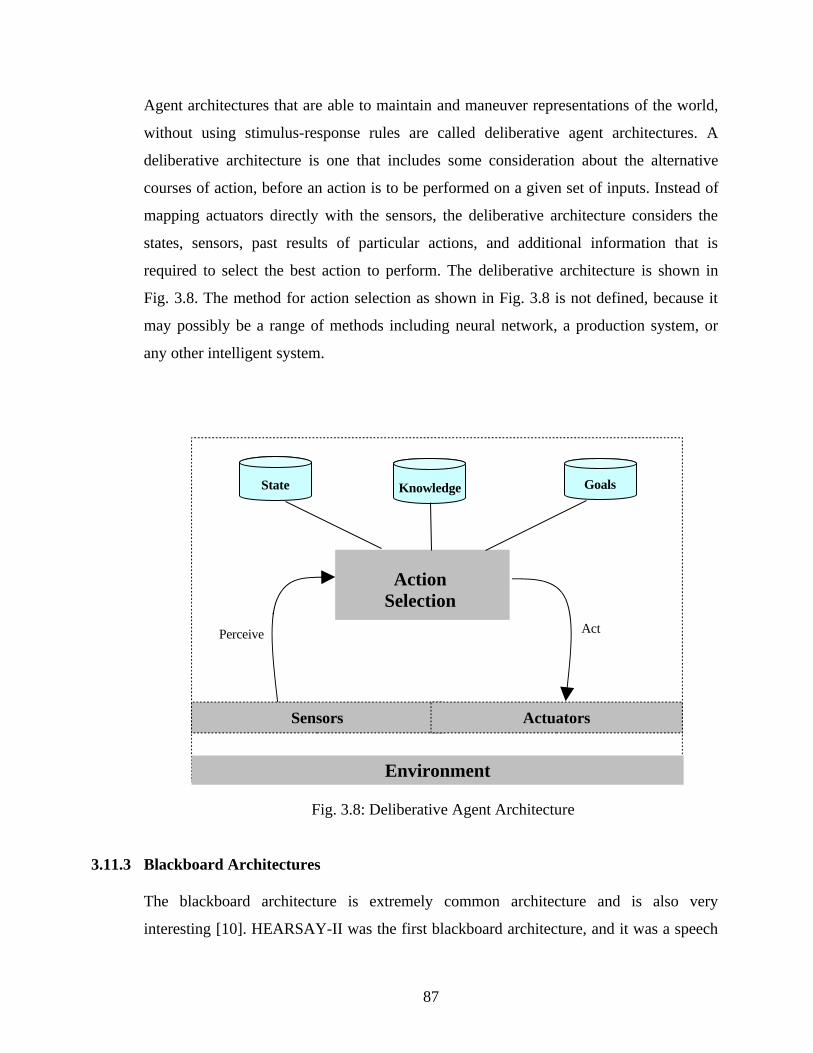
Agent architectures that are able to maintain and maneuver representations of the world,
without using stimulus-response rules are called deliberative agent architectures. A
deliberative architecture is one that includes some consideration about the alternative
courses of action, before an action is to be performed on a given set of inputs. Instead of
mapping actuators directly with the sensors, the deliberative architecture considers the
states, sensors, past results of particular actions, and additional information that is
required to select the best action to perform. The deliberative architecture is shown in
Fig. 3.8. The method for action selection as shown in Fig. 3.8 is not defined, because it
may possibly be a range of methods including neural network, a production system, or
any other intelligent system.
Fig. 3.8: Deliberative Agent Architecture
3.11.3 Blackboard Architectures
The blackboard architecture is extremely common architecture and is also very
interesting [10]. HEARSAY-II was the first blackboard architecture, and it was a speech
87
Environment
Sensors Actuators
Action Selection
KnowledgeState Goals
Perceive Act
Sensors Actuators

understanding system. This architecture works around a global work area called the
blackboard. The blackboard is a universal work area for a number of agents that operate
cooperatively to solve a particular problem. Therefore, the blackboard consists of
information about the environment, but the cooperative agents produce intermediate work
results. Fig. 3.9 shows an example blackboard architecture that could be applied to an
agent system. In this example, two different agents are employed to sample the
environment through the existing sensors (i.e., the sensor agent), and also through the
actuators available in the system.
The blackboard keeps the current state of the environment that is regularly updated by the
sensor, and when an action has to be performed, the action agent interprets this action
into control of the actuators. One or more reasoning agents actually provide the control of
the agent system. These agents work jointly to accomplish the goals, which would also be
enclosed in the blackboard. In this example, the first reasoning agent might employ the
goal definition behaviors, while the second reasoning agent may possibly implement the
planning portion.
As the blackboard is a universal work area, coordination between the agents should be
provided so that the agents do not step over one another. That is why, agents are
programmed based on their need, e.g., agents can examine the blackboard, and when
information is added, they can ask for the ability to operate. The scheduler can then
decide which agents wish to work on the blackboard, and then activate them accordingly.
The blackboard agent architecture is easily implemented on a multi-threading system.
With every agent can become one or more system threads. That is why; the blackboard
architecture is extremely common for the implementation of agent and non-agent
systems.
88
Environment
Sensors Actuators
BlackboardPerceive Act
SensorAgent
Reasoning Agent
Reasoning Agent
ActionAgent
Sensors Actuators

Fig. 3.9: Blackboard Agent Architecture
3.11.4 Belief-Desire-Intention (BDI) Architecture
BDI (Belief-Desire-Intention) agent architectures are deliberative architectures that
follow the theory of human reasoning and having planning abilities as defined by
Michael Bratman [123]. When agents are modeled within BDI architecture, they
internally indicate their beliefs, desires, and intentions and used practical reasoning to
make a decision about action selection. For an agent, belief means the view of the world
(i.e., what the agent beliefs about the state of the environment), desires are the goals
(what the agent wants to achieve) of an agent, and Intentions indicate that the Beliefs and
Desires are used by agents in order to select one or more actions, to meet the desired
goals (see Fig. 3.10). Therefore, the BDI architecture defines the fundamental
architecture of any deliberative agent. It stores the beliefs (state of the environment),
maintains a desires (set of goals), and finally, a premeditated element that maps beliefs to
desires (to select one or more actions that change the state of the environment based on
the agent’s needs)
89
Sensors Actuators
Desires
Environment
IntentionsBeliefs
Perceptual action input output
a) Horizontal Layer b) Vertical Layer c) Vertical Layer (One pass control) (Two pass control)
Layer n
........
Layer 2
Layer 1
Layer n
........
Layer 2
Layer 1
Layer n
Layer 2
Layer 1

Fig. 3.10: BDI Agent Architecture
Many researchers have accepted that neither pure reasoning approach nor pure behavioral
approach is best suited for building agents that are able to take intelligent autonomous
actions. Intelligent autonomous actions have the capability of both reactive behavior and
reasoning. This has led to the development of variety of hybrid architectures, which try to
combine the essential elements of both deliberative and behavioral systems.
3.12 Hybrid Agents
Based on the requirement that an agent should be capable of representing both reactive
and proactive behavior, separate subsystems have been created to deal with these types of
behaviors. This architecture has different subsystems that are arranged into a set of
interacting layers. In this section, layered architectures: InteRRaP and TouringMachines
are discussed. In order to deal with both reactive and proactive behaviors, there will be at
least two layers. Therefore, different architectures are differentiated in relation to how the
control and information flows within these layers. Following are the two types of control
flow inside the layered agent architecture:
• Horizontal layering: In horizontal layering architecture, each software layer
is directly linked to the sensory input and action output. Therefore, in this case
90
Sensor Input
Action Output
Perceptual action input output
a) Horizontal Layer b) Vertical Layer c) Vertical Layer (One pass control) (Two pass control)
Layer n
........
Layer 2
Layer 1
Layer n
........
Layer 2
Layer 1
Layer n
Layer 2
Layer 1

each layer behaves like an agent by giving suggestions for particular action to
perform.
• Vertical layering: In vertically layered agent architectures, decision making
is made possible through several software layers and each layer deals with the
environment at different levels of abstraction.
The advantage of horizontal layered architecture [145] is its conceptual simplicity: if we
want an agent to display n different types of behavior, then n different layers are
implemented. However, each layer is competing with one another to produce action
suggestions; there are chances that the overall agent behavior may not be consistent. In
order to ensure consistency in the horizontally layered architectures, these types of
architectures normally contain a mediator function, which decides about the particular
control layer to be active at any time. Such a central control can sometimes become very
problematic, and the designers must consider all potential interactions between layers.
Fig. 3.11: Horizontal and Vertical Layering
91
Sensor Input
Action Output
Perceptual action input output
a) Horizontal Layer b) Vertical Layer c) Vertical Layer (One pass control) (Two pass control)
Layer n
........
Layer 2
Layer 1
Layer n
........
Layer 2
Layer 1
Layer n
Layer 2
Layer 1
action output
Perceptual input
Perceptual input
action output

If there are n layers in the agent architecture, and each layer can suggest up to m possible
actions, it means there are mn possible interactions to be considered. This is undoubtedly
very difficult from a design point of view. The presence of mediator function in the agent
architecture also introduces a bottleneck into the decision making process.
These problems are partially solved in vertical layered architectures. The vertically
layered architectures can be subdivided into one-pass and two-pass architectures. In one-
pass architectures, control passes serially through each layer, until it reaches the final
layer where the action output is generated. In two-pass architectures, information first
flows up the top-most layer of the architecture (the first pass) and then control flows back
down.
Fig. 3.12: Horizontal Layered Architecture (Touring Machines)
In one-pass and two-pass vertically layered agent architectures, the complexity of inter-
layers interactions is reduced: as there are n - 1 interfaces present between n layers, and if
each layer is able to suggest m actions, then at the most m2(n - 1) interactions can be
92
Cooperative Planning
Local Planipcation
Behavior
Sensor Input
Action Output
Modling Layer
Planning Layer
Reactive Layer
Control Subsystem
Action SubsystemPerception Subsystem

considered between the layers. It is much simpler than the horizontally layered
architecture. But, this simplicity in the vertical architectures comes at the cost of decrease
in flexibility i.e. in order to take a decision the control has to pas through different layers.
This architecture is also not fault tolerant; the failure of process at any layer is most like
to have serious effects on the performance of an agent.
3.13 Conclusion
In this chapter, a comprehensive survey of the existing channel allocation schemes has
been done. The chapter also discussed various agent architectures that are used to solve
different real time problems. The next chapter presents an Optimized Blocking Dropping
Load Balancing (OBDBLB) algorithm.
Chapter 4
Optimized Blocking Dropping Load Balancing
(OBDLB) Algorithm
4.1Introduction
This chapter builds a specialized model based on hybrid agents and proposes an
Optimized Blocking Dropping Load Balancing (OBDLB) algorithm for efficient channel
allocation.
4.2INTERRAP: Vertical Layered Architecture
INTERRAP is a technique to model resource-bounded interacting agents by associating
reactivity with deliberation and cooperation capabilities [123]. INTERRAP is based on a
BDI architecture, i.e., the informational, motivational, and deliberative state of an agent
[9], which is explained through beliefs, goals, a rather generalized version of plans, and
93
Cooperative Planning
Local Planipcation
Behavior