chapter 3 vector spaces - t umathstat.sci.tu.ac.th/~archara/ma131/ma131-117/... · chapter 3 vector...
TRANSCRIPT
Chapter 3
Vector Spaces
3.1 Real Vector Spaces
Vector Space Axioms
Let V be an arbitrary nonempty on which the operations of additions and scalarmultiplication are defined. If the following axioms are satisfied by all objects u,v, w in V and all scalars k and m, then we call V a vector space and we callthe objects in V vectors.
1. If u and v are objects in V , then u+ v is in V .
2. u+ v = v + u
3. u+ (v +w) = (u+ v) +w
4. There is an object 0 in V , called a zero vector for V , such that 0+ u =u+ 0 = u for all u in V .
5. For each u in V , there is an object −u in V , called a negative of u, suchthat u+ (−u) = (−u) + u = 0.
6. If k is any scalar and u is any object in V , then ku is in V .
7. k(u+ v) = ku+ kv
8. (k +m)u = ku+mu
9. k(mu) = (km)u
10. 1u = u
Definition 3.1.
Remark Vector spaces in which the scalars are complex numbers are called complex
vector spaces, and those in which the scalars must be real are called real vector
spaces. In this chapter, all of our scalar will be real numbers. det` det
91

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 92
Examples of Vector Spaces
Let u = (u1, u2, . . . , un) and v = (v1, v2, . . . , vn) are two vectors in Rn.
The sum u+ v is defined by
u+ v = (u1 + v1, u2 + v2, . . . , un + vn)
and if k is any scalar, the scalar multiple ku is defined by
ku = (ku1, ku2, . . . , kun)
The operations of addition and scalar multiplication in the above are called thestandard operations on R
n.We can show that the set V = R
n with these standard operations is a vectorspace. ♣
Example 3.1 (Rn Is a Vector Space).
The three most important special cases of Rn are R (the real numbers), R2 (the
vectors in the plane), and R3 (the vectors in 3-space).
Show that the set V of all 2 × 2 matrices with real entries is a vector space ifaddition is defined to be matrix addition and scalar multiplication is defined tobe matrix scalar multiplication.
Example 3.2 (A Vector Space of 2× 2 Matrices).
Solution It convenient to verify the axioms in the following order: 1, 6, 2, 3, 7, 8, 9, 4,5, and 10. Let
u =
[
u11 u12
u21 u22
]
and v =
[
v11 v12v21 v22
]
To prove Axiom 1, we must show that u + v is an object in V ; that is, we must showthat u+ v is a 2× 2 matrix.
u+ v =
[
u11 u12
u21 u22
]
+
[
v11 v12v21 v22
]
=
[
u11 + v11 u12 + v12u21 + v21 u22 + v22
]
Similarly, Axiom 6 holds because for any real scalar number k, we have
ku = k
[
u11 u12
u21 u22
]
=
[
ku11 ku12
ku21 ku22
]
so ku is a 2× 2 matrix and consequently is an object in V .Axiom 2 follows from Theorem1.2 (a) since
u+ v =
[
u11 u12
u21 u22
]
+
[
v11 v12v21 v22
]
=
[
v11 v12v21 v22
]
+
[
u11 u12
u21 u22
]
= v + u

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 93
Similarly, Axiom 3 follows from part (b) of that theorem; and Axioms 7, 8, and 9 followfrom parts (f), (h), and (j), respectively.
To prove Axiom 4, we must find an object 0 in V such that 0 + u = u+ 0 = u forall u in V . This can be done by defining 0 to be
0 =
[
0 00 0
]
With this definition,
0+ u =
[
0 00 0
]
+
[
u11 u12
u21 u22
]
=
[
u11 u12
u21 u22
]
= u
and similarly u+ 0 = u. To prove Axiom 5, we must show that each object u in V hasa negative −u such that u+ (−u) = 0 and (−u) +u = 0. This can be done by definingthe negative of u to be
−u =
[
−u11 −u12
−u21 −u22
]
With this definition,
u+ (−u) =
[
u11 u12
u21 u22
]
+
[
−u11 −u12
−u21 −u22
]
=
[
0 00 0
]
= 0
and similarly (−u) + u = 0. Finally, Axiom 10 is a simple computation:
1u = 1
[
u11 u12
u21 u22
]
=
[
u11 u12
u21 u22
]
= u ♣
Example 3.2 is a special case of a vector space V of all m × n matrices with realentries, together with the operations of matrix addition and scalar multiplication. Weshall denote this vector space by the symbol Mm×n.
Let V be the set of real-value functions defined on the entire real line (−∞,∞).If f and g are two such functions and k is any real number, define the sumfunction f + g and the scalar multiple kf , respectively, by
(f + g)(x) = f(x) + g(x) and (kf)(x) = kf(x)
In the exercise we shall ask you to show that V is a vector space with respectto these operations. This vector space is denoted by F (−∞,∞). ♣
Example 3.3 (A Vector Space of Real-Valued Functions).

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 94
Let Pn denote the set of all polynomials of degree less than or equal n. If p andq are two polynomials in Pn and k is any real number, define the sum p+ q andthe scalar multiple kp, respectively, by
(p+ q)(x) = p(x) + q(x) and (kp)(x) = kp(x)
for all real number x. In this case, the zero vector is the zero polynomial,
z(x) = 0xn + 0xn−1 + 0xn−2 + · · ·+ 0x+ 0
It is easily verified that all the vector space axioms holds. thus Pn, with thestandard addition and scalar multiplication of functions, is a vector space. ♣
Example 3.4 (The Vector Space Pn).
Let V consist of a single object, which we denote by 0, and define
0+ 0 = 0 and k0 = 0
for all scalar k. It is easy to check that all the vector space axioms are satisfied.We call this the zero vector space.
Example 3.5 (The Zero Vector Space).
Let V = R2 and define addition and scalar multiplication operations as follows:
If u = (u1, u2) and v = (v1, v2), then define
u+ v = (u1 + v1, u2 + v2)
and if k is any real number, then define
ku = (ku1, 0)
For example,if u = (2, 4),v = (−3, 5), and k = 7, then
u+ v = (2 + (−3), 4 + 5) = (−1, 8)ku = 7u = (7 · 2, 0) = (14, 0)
In the exercises we will ask you to show that the first nine vector space axiomsare satisfied; however, there are values of u for which Axiom 10 fails to hold.For example, if u = (u1, u2) is such that u2 6= 0, then
1u = 1(u1, u2) = (1 · u1, 0) = (u1, 0) 6= u
Thus V is not a vector space with the stated operations. ♣
Example 3.6 (A Set That Is Not a Vector Space).
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 95
Some Properties of Vectors
Let V be a vector space, u a vector in V , and k a scalar; then:
(a) 0u = 0
(b) k0 = 0
(c) (−1)u = −u
(d) If ku = 0, then k = 0 or u = 0.
Theorem 3.1.
Exercise 3.1
1. A set of objects is given, together with operations of addition and scalar multipli-cation. Determine which sets are vector spaces under the given operations. Forthose that are not vector spaces, list all axioms that fail to hold.
(a) The set of all triples of real numbers (x, y, z) with the operations
(x, y, z) + (x′, y′, z′) = (x+ x′, y + y′, z + z′) and k(x, y, z) = (kx, y, z)
(b) The set of all pairs of real numbers (x, y) with the operations
(x, y) + (x′, y′) = (x+ x′, y + y′) and k(x, y) = (2kx, 2ky)
(c) The set of all pairs of real numbers of the form (x, 0) with the standardoperations on R
2.
(d) The set of all n-tuples of real numbers of the form (x, x, . . . , x) with thestandard operations on R
n.
(e) The set of 2× 2 matrices of the form
[
a 11 b
]
with the standard matrix addition and scalar multiplication.
(f) The set of all real-valued functions f defined everywhere on the real line andsuch that f(1) = 0, with the operations defined in Example 3.3.
(g) The set of all pairs of real numbers of the form (1, x) with the operations
(1, y) + (1, y′) = (1, y + y′) and k(1, y) = (1, ky)
(h) The set of polynomials of the form a + bx with the operations
(a0+a1x)+(b0+b1x) = (a0+b0)+(a1+b1)x and k(a0+a1x) = (ka0)+(ka1)x
2. Complete the unfinished details of Example 3.3.

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 96
3. Show that the first nine vector space axioms are satisfied if V = R2 has the addition
and scalar multiplication operations defined in Example 3.6.
Answer to Exercise 3.1
1. (a) Not a vector space. Axiom 8 fails.
(b) Not a vector space. Axiom 9 and 10 fail.
(c) The set is a vector space under the given operations.
(d) The set is a vector space under the given operations.
(e) Not a vector space. Axiom 1, 4, 5, and 6 fail.
(f) The set is a vector space under the given operations.
(g) The set is a vector space under the given operations.
(h) The set is a vector space under the given operations.
3.2 Subspaces
Given a vector space V , it is often possible to form another vector space by taking asubset S of V and using the operations of V .
A subset S of a vector space V is called subspaces of V if S is itself a vectorspace under the addition and scalar multiplication defined on V .
Definition 3.2.
In general, one must verify the ten vector space axioms to show that a set S withaddition and scalar multiplication forms a vector space. However, if S is part of thelarger set V that is already known to be a vector space, then certain axioms need notbe verified for S because they are “inherited” from V . For example, there is no need tocheck that u + v = v + u (Axiom 2) for S because this holds for all vectors in V andconsequently for all vectors in S. Other axioms inherited by S from V are 3, 7, 8, 9, and10. Thus to show that the set S is a subspace of a vector space V , we need only verifyAxioms 1, 4, 5, and 6. The following theorem shows that even Axioms 4 and 5 can beomitted.
If S is a nonempty subset of a vector space V , then S is a subspace of V if andonly if the following conditions hold.
(a) If u and v are vectors in S, then u+ v is in S.
(b) If k is any scalar and u in any vector in S, then ku is in S.
Theorem 3.2.

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 97
Remark
1. A set S of one or more vectors form a vector space V is said to be closed
under addition if condition (a) in Theorem 3.2 holds and closed under scalar
multiplication if condition (b) holds. Thus Theorem 3.2 states that S is a subspace of
V if and only if S is closed under addition and closed under scalar multiplication.
2. Every nonempty vector space V has at least two subspaces: V itself is a subspace,and the set {0} consisting of just the zero vector in V is a subspace called the zero
subspace.
Let S = {(x1, x2, x3) ∈ R3 | x1 = x2}. Show that S is a subspace of R3.
Example 3.7.
Solution
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 98
Let S = {A ∈ M2×2 | a12 = −a21}. Show that S is a subspace of M2×2.
Example 3.8.
Solution
Let S be the set of all polynomials of degree less than n with the propertyp(0) = 0. Show that S is a subspace of Pn.
Example 3.9.
Solution
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 99
Let Cn[a, b] be the set of all functions f that have a continuous n th derivativeon [a, b]. We can verify that Cn[a, b] is a subspace of C[a, b]. ♣
Example 3.10.
Remark C[a, b] denote the set of all real-value functions that defined and continuouson the closed interval [a, b].
Let S be the set of all functions f in C2[a, b] such that
f ′′(x) + f(x) = 0
for all x in [a, b]. Show that S is a subspace of C2[a, b]
Example 3.11.
Solution
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 100
Let W be the set of all points (x, y) in R2 such that x ≥ 0 and y ≥ 0. The set
W is not a subspace of R2 since it is not closed under scalar multiplication. Forexample, u = (1, 1) lies in W , but its negative (−1)u = −u = (−1,−1) doesnot. ♣
Example 3.12 (A Subset of R2 That Is Not a Subspace).
Let W =
{[
x1
]∣
∣
∣
∣
x is a real number
}
. Determine whether W is a subspace of
M2×1.
Example 3.13.
Solution
Solution Spaces of Homogeneous Systems
If Ax = b is a system of linear equations, then each vector x that satisfies this equationis called solution vector of the system. The following theorem shows that the solutionvectors of a homogeneous linear system form a vector space, which we shall call solutionspace of the system.
If Ax = 0 is a homogeneous linear system of m equations in n unknowns, thenthe set of solution vectors, denoted by N(A), is a subspace of Rn.
Theorem 3.3.
Note N(A) = {x ∈ Rn |Ax = 0}
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 101
Determine N(A) if A =
[
1 1 1 02 1 0 1
]
.
Example 3.14.
Solution
A vector w is called a linear combination of the vectors v1,v2, . . . ,vr if itcan be expressed in the form
w = k1v1 + k2v2 + · · ·+ krvr
where k1, k2, . . . , kr are scalars.
Definition 3.3.
Remark If r = 1, then the equation in Definition 3.3 reduces to w = k1v1; that is, wis a linear combination of a single vector v1 if it is a scalar multiple of v1.

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 102
Every vector v = (a, b, c) in R3 is expressible as a linear combination of the
standard basis vectors
i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1)
since
v = (a, b, c) = a(1, 0, 0) + b(0, 1, 0) + c(0, 0, 1) = ai + bj + ck ♣
Example 3.15.
Consider the vectors u = (1, 2,−1) and v = (6, 4, 2) in R3. Show that
(a) w = (9, 2, 7) is a linear combination of u and v and
(b) w′ = (4,−1, 8) is not a linear combination of u and v
Example 3.16.
Solution
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 103
Spanning
If v1,v2, . . . ,vr are vectors in vector space V , then generally some vectors in V may belinear combinations of v1,v2, . . . ,vr and other may not. The following theorem showsthat if we construct a set W consisting of all those vectors that are expressible as linearcombinations of v1,v2, . . . ,vr, then W forms a subspace of V .
If v1,v2, . . . ,vr are vectors in a vector space V , then
(a) The set W of all linear combinations of v1,v2, . . . ,vr is a subspace of V .
(b) W is the smallest subspace of V that contains v1,v2, . . . ,vr in the sensethat every other subspace of V that contains v1, v2, . . ., vr must containW .
Theorem 3.4.
If S = {v1,v2, . . . ,vr} is the set of vectors in a vector space V , then the subspaceW of V consisting of all linear combinations of the vector in S is called thespace spanned by v1, v2, . . ., vr, and we say that the vectors v1, v2, . . ., vr
span W . To indicate that W is the space spanned by the vectors in the setS = {v1,v2, . . . ,vr}, we write
W = Span(S) or W = Span{v1,v2, . . . ,vr}
Definition 3.4.
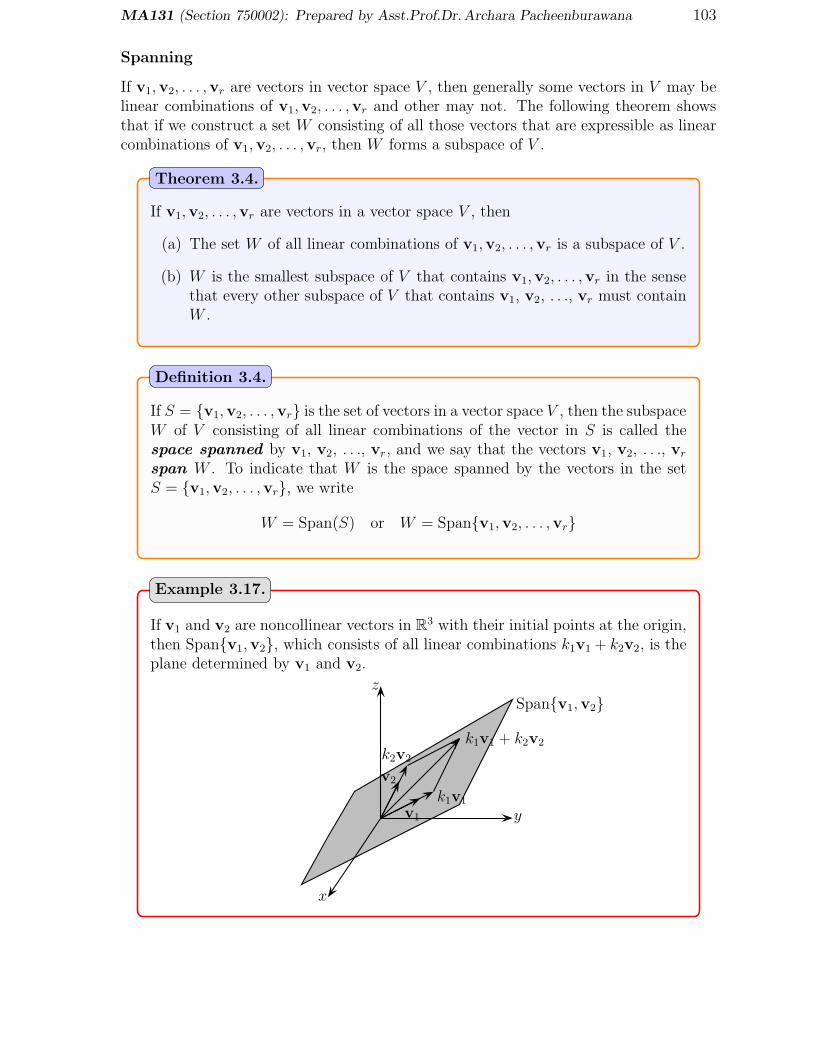
If v1 and v2 are noncollinear vectors in R3 with their initial points at the origin,
then Span{v1,v2}, which consists of all linear combinations k1v1 + k2v2, is theplane determined by v1 and v2.
z
x
y
Span{v1,v2}
k1v1 + k2v2
v1
k1v1
v2
k2v2
Example 3.17.
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 104
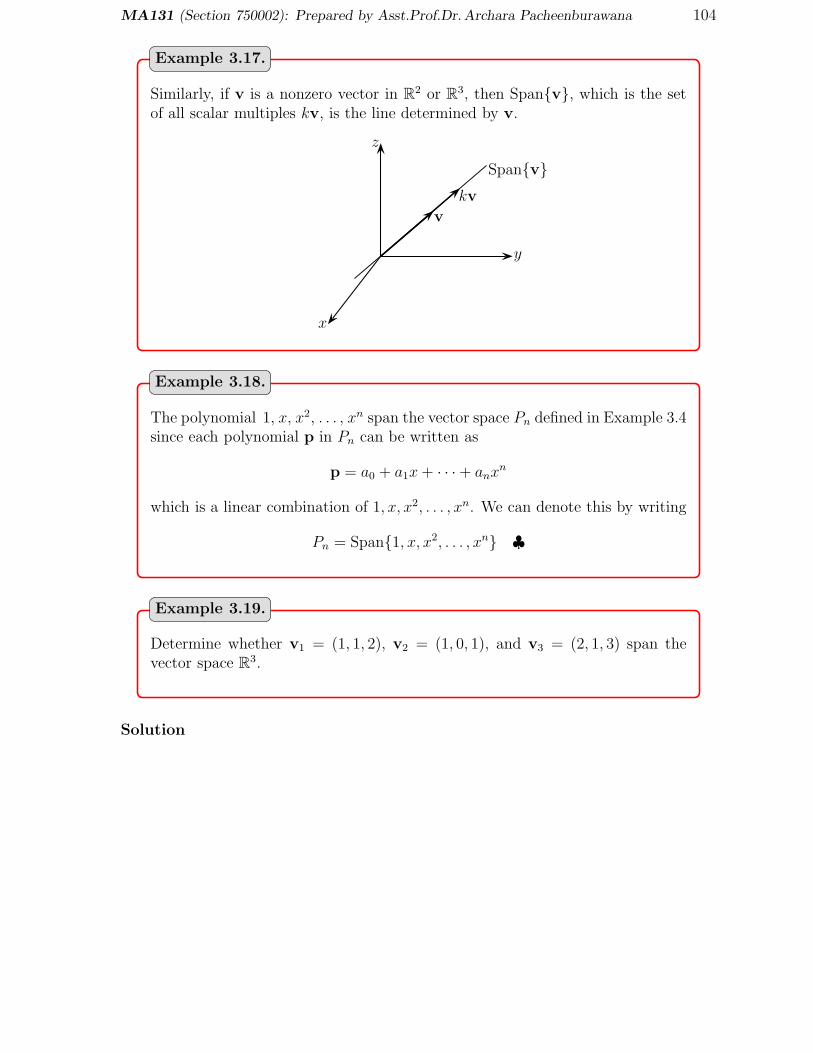
Similarly, if v is a nonzero vector in R2 or R3, then Span{v}, which is the set
of all scalar multiples kv, is the line determined by v.
z
x
y
Span{v}
v
kv
Example 3.17.
The polynomial 1, x, x2, . . . , xn span the vector space Pn defined in Example 3.4since each polynomial p in Pn can be written as
p = a0 + a1x+ · · ·+ anxn
which is a linear combination of 1, x, x2, . . . , xn. We can denote this by writing
Pn = Span{1, x, x2, . . . , xn} ♣
Example 3.18.
Determine whether v1 = (1, 1, 2), v2 = (1, 0, 1), and v3 = (2, 1, 3) span thevector space R
3.
Example 3.19.
Solution

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 105
Determine whether the vectors 1− x2, x+ 2, and x2 span P2.
Example 3.20.
Solution
If S = {v1,v2, . . . ,vr} and S ′ = {w1,w2, . . . ,wk} are two set of vectors in avector space V , then
Span{v1,v2, . . . ,vr} = Span{w1,w2, . . . ,wk}
if and only if each vector in S is a linear combination of those in S ′ and eachvector in S ′ is a linear combination of those in S.
Theorem 3.5.
Exercise 3.2
1. Use Theorem 3.2 to determine which of the following sets form subspaces of R2.
(a) {(x1, x2)| x1 + x2 = 0} (b) {(x1, x2)| x1x2 = 0}
(c) {(x1, x2)| x1 = 3x2} (d) {(x1, x2)| |x1| = |x2|}
(e) {(x1, x2)| x21 = x2
2}

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 106
2. Use Theorem 3.2 to determine which of the following are subspaces of R3.
(a) all vectors of the form (a, 0, 0)
(b) all vectors of the form (a, 1, 1)
(c) all vectors of the form (a, b, c), where b = a + c
(d) all vectors of the form (a, b, c), where b = a + c+ 1
(e) all vectors of the form (a, b, 0)
(f) all vectors of the form (a, b, c), where a = b = c
3. Use Theorem 3.2 to determine which of the following are subspaces of P3.
(a) all polynomials a0 + a1x+ a2x2 + a3x
3 for which a0 = 0
(b) all polynomials a0 + a1x+ a2x2 + a3x
3 for which a0 + a1 + a2 + a3 = 0
(c) all polynomials a0+a1x+a2x2+a3x
3 for which a0, a1, a2, and a3 are integers
(d) all polynomials p(x) of the form a0 + a1x+ a2x2 + a3x
3 such that p(0) = 0
4. Use Theorem 3.2 to determine which of the following sets form subspaces of M2×2.
(a) The set of all 2× 2 diagonal matrices
(b) The set of all 2× 2 triangular matrices
(c) The set of all 2× 2 lower triangular matrices
(d) The set of all 2× 2 matrices A such that a12 = 1
(e) The set of all 2× 2 matrices B such that b11 = 0
(f) The set of all symmetric 2× 2 matrices
(g) The set of all singular 2× 2 matrices
5. Use Theorem 3.2 to determine which of the following are subspaces of Mn×n
(a) all n× n matrices A such that tr(A) = 0
(b) all n× n matrices A such that AT = −A
(c) all n× n matrices A such that the linear system Ax = 0 has only the trivialsolution
(d) all n× n matrices A such that AB = BA for a fixed n× n matrix B
6. Use Theorem 3.2 to determine which of the following sets form subspaces ofC[−1, 1].
(a) The set of function f in C[−1, 1] such that f(−1) = f(1)
(b) The set of odd functions in C[−1, 1]
(c) The set of continuous nondecreasing functions on [−1, 1]
(d) The set of function f in C[−1, 1] such that f(−1) = 0 and f(1) = 0
(e) The set of function f in C[−1, 1] such that f(−1) = 0 or f(1) = 0

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 107
7. Determine the nullspace of each of the following matrices.
(a) A =
[
2 13 2
]
(b) A =
[
1 2 −3 −1−2 −4 6 3
]
(c) A =
1 3 −42 −1 −1−1 −3 4
(d) A =
1 1 −1 22 2 −3 1−1 −1 0 −5
8. Which of the following are linear combinations of u = (0,−2, 2) and v = (1, 3,−10)?
(a) (2, 2, 2) (b) (3, 1, 5) (c) (0, 4, 5) (d) (0, 0, 0)
9. Express the following as linear combinations of u = (2, 1, 4), v = (1,−1, 3), andw = (3, 2, 5).
(a) (−9,−7,−15) (b) (6, 11, 6) (c) (0, 0, 0) (d) (7, 8, 9)
10. Express the following as linear combinations of p1 = 2+x+4x2, p2 = 1−x+3x2,and p3 = 3 + 2x+ 5x2.
(a) −9 − 7x− 15x2
(b) 6 + 11x+ 6x2
(c) 0
(d) 7 + 8x+ 9x2
11. In each part, determine whether the given vectors span R3.
(a) v1 = (2, 2, 2), v2 = (0, 0, 3), v3 = (0, 1, 1)
(b) v1 = (2,−1, 3), v2 = (4, 1, 2), v3 = (8,−1, 8)
(c) v1 = (3, 1, 4), v2 = (2,−3, 5), v3 = (5,−2, 9), v4 = (1, 4,−1)
(d) v1 = (1, 2, 6), v2 = (3, 4, 1), v3 = (4, 3, 1), v4 = (3, 3, 1)
12. Which of the following are spanning sets for P2? Justify your answer.
(a) {1, x2, x2 − 2} (b) {2, x2, x, 2x+ 3}
(c) {x+ 2, x+ 1, x2 − 1} (d) {x+ 2, x2 − 1}
13. Let f = cos2 x and g = sin2 x. Which of the following lie in the space spanned byf and g?
(a) cos 2x (b) 3 + x2 (c) 1 (d) sin x (e) 0
14. In M2×2 let
E11 =
[
1 00 0
]
, E12 =
[
0 10 0
]
, E21 =
[
0 01 0
]
, E22 =
[
0 00 1
]
Show that E11, E12, E21, E22 span M2×2.

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 108
Answer to Exercise 3.2
1. (a), (c) 2. (a), (c), (f) 3. (a), (b), (d) 4. (a), (c), (e), (f) 5.(a), (b), (d)
6. (a), (b), (d)
7. (a) {(0, 0)} (b) Span {(−2, 1, 0, 0), (3, 0, 1, 0)}
(c) Span {(1, 1, 1)} (d) Span {(−5, 0,−3, 1), (−1, 1, 0, 0)}
8. (a), (b), (d)
9. (a) −2(2, 1, 4) + (1,−1, 3)− 2(3, 2, 5) (b) 4(2, 1, 4)− 5(1,−1, 3) + (3, 2, 5)
(c) 0(2, 1, 4) + 0(1,−1, 3) + 0(3, 2, 5) (d) 0(2, 1, 4)− 2(1,−1, 3) + 3(3, 2, 5)
10. (a) −2p1 + p2 − 2p3 (b) 4p1 − 5p2 + p3 (c) 0p1 + 0p2 + 0p3
(d) 0p1 − 2p2 + 3p3
11. (a) The vectors span. (b) The vectors do not span.
(c) The vectors do not span. (d) The vectors span.
12. (b), (c) 13. (a), (c), (e)
3.3 Linear Independence
In this section we look more closely at the structure of vector spaces. To begin with, werestrict ourselves to vector spaces that can be generated from a finite set of elements.Each vector in the vector space can be built up from the elements in this generatingset using only the operations of addition and scalar multiplication. This generating setis usually referred to as a spanning set. In particular, it is desirable to find a minimal
spanning set. By minimal we mean a spanning set with no unnecessary elements (i.e.all the elements in the set are needed in order to span the vector space). To see how tofind a minimal spanning set, it is necessary to consider how the vectors in the collectiondepend on each other. Consequently, we introduce the concepts of linear dependence
and linear independence. These simple concepts provide the key to understanding thestructure of vector spaces.
Consider the following vectors in R3:
x1 =
1−12
, x2 =
−231
, x3 =
−138
Let S be the subspace of R3 spanned by x1, x2, x3. Actually, S can be represented interms of two vectors x1 and x2, since the vector x3 is already in the span of x1 and x2.
x3 = 3x1 + 2x2 (3.1)
Any linear combination of x1, x2, x3 can be reduced to a linear combination of x1 andx2:
α1x1 + α2x2 + α3x3 = α1x1 + α2x2 + α3(3x1 + 2x2)
= (α1 + 3α3)x1 + (α2 + 2α3)x2

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 109
ThusS = Span{x1,x2,x3} = Span{x1,x2}
Equation (3.1) can be rewritten in the form
3x1 + 2x2 − 1x3 = 0 (3.2)
Since the three coefficients in (3.2) are nonzero, we could solve for any vector in termsof the other two.
x1 = −2
3x2 +
1
3x3, x2 = −
3
2x1 +
1
2x3, x3 = 3x1 + 2x2
It follows that
Span{x1,x2,x3} = Span{x2,x3} = Span{x1,x3} = Span{x1,x2}
Because of the dependency relation (3.2), the subspace S can be represented as the spanof any two of the given vectors.
On the other hand, no such dependency relationship exists between x1 and x2. In-deed, if there were scalars k1 and k2, not both 0, such that
k1x1 + k2x2 = 0 (3.3)
then we could solve for one of the vectors in terms of the other.
x1 = −k2k1
x2 (k1 6= 0) or x2 = −k1k2
x1 (k2 6= 0)
However, neither of the two vectors in question is a multiple of the other. Therefore,Span{x1} and Span{x2} are both proper subspaces of Span{x1,x2}, and the only waythat (3.3) can hold is if k1 = k2 = 0.
We can generalize this example by making the following observations.
(I) If {v1,v2, . . . ,vn} span a vector space V and one of these vectors can be writtenas a linear combination of the other n − 1 vectors, then those n − 1 vectors spanV .
(II) Given n vectors v1,v2, . . . ,vn, it is possible to write one of the vectors as a linearcombination of the other n−1 vectors if and only if there exist scalars k1, k2, . . . , knnot all zero such that
k1v1 + k2v2 + · · ·+ knvn = 0
If S = {v1,v2, . . . ,vr} is a nonempty set of vectors, then the vector equation
k1v1 + k2v2 + · · ·+ krvr = 0
has at least one solution, namely
k1 = 0, k2 = 0, . . . , kr = 0
If this is the only solution, then S is called a linearly independent set. Ifthere are other solutions, then S is called a linearly dependent set.
Definition 3.5.

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 110
It follows from (I) and (II) that, if {v1,v2, . . . ,vr} is a minimal spanning set, thenv1,v2, . . . ,vr are linearly independent. Conversely, if v1,v2, . . . ,vr are linearly indepen-dent and span V , then {v1,v2, . . . ,vr} is a minimal spanning set for V .
If v1 = (2,−1, 0, 3), v2 = (1, 2, 5,−1), and v3 = (7,−1, 5, 8), then the set ofvectors S = {v1,v2,v3} is linearly dependent, since 3v1 + v2 − v3 = 0. ♣
Example 3.21.
The polynomial
p1 = 1− x, p2 = 5 + 3x− 2x2, p3 = 1 + 3x− x2
form a linear dependent set in P2 since 3p1 − p2 + 2p3 = 0. ♣
Example 3.22.
Consider the vectors i = (1, 0, 0), j = (0, 1, 0), and k = (0, 0, 1) in R3. In terms
of components, the vector equation
k1i + k2j+ k3k = 0
becomesk1(1, 0, 0) + k2(0, 1, 0) + k3(0, 0, 1) = (0, 0, 0)
or, equivalently,(k1, k2, k2) = (0, 0, 0)
This implies that k1 = 0, k2 = 0, and k3 = 0, so the set S = {i, j,k} is linearindependent. A similar argument can be used to show that the vectors
e1 = (1, 0, 0, . . . , 0), e2 = (0, 1, 0, . . . , 0), . . . , en = (0, 0, 0, . . . , 1)
form a linear independent set in Rn. ♣
Example 3.23.
Show that1, x, x2, . . . , xn
form a linearly independent set of vectors in Pn.
Example 3.24.
Solution Assume that some linear combination of polynomials is zero, say
a0 + a1x+ a2x2 + · · ·+ anx
n = 0 for all x ∈ (−∞,∞) (3.4)
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 111
We must show thata0 = a1 = a2 = · · · = an = 0
To see that this is so, recall from algebra that a nonzero polynomial of degree n has atmost n distinct roots. But this is implies that a0 = a1 = a2 = · · · = an = 0; otherwise,it would follow from (3.4) that a0+a1x+a2x
2+ · · ·+anxn is a nonzero polynomial with
infinitely many roots. ♣
Determine whether the vectors
v1 = (1,−2, 3), v2 = (5, 6,−1), v3 = (3, 2, 1)
form a linear dependent set or a linear independent set.
Example 3.25.
Solution

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 112
Let v1,v2, . . . ,vn be n vectors in Rn and let X =
[
v1 v2 · · · vn
]
. Thevectors v1, v2, . . ., vn will be linearly dependent if and only if X is singular.
Theorem 3.6.
We can use Theorem 3.6 to test whether n vectors are linearly independent in Rn.
Simply form a matrix X whose columns are the vectors being tested. To determinewhether X is singular, calculate the value of det(X). If det(X) = 0, the vectors arelinearly dependent. If det(X) 6= 0, the vectors are linearly independent.
Determine wether the vectors
v1 = (4, 2, 3), v2 = (2, 3, 1), v3 = (2,−5, 3)
are linearly dependent.
Example 3.26.
Solution
To determine wether r vectors v1, v2, . . ., vr in Rn are linearly independent, we can
rewrite the equationk1v1 + k2v2 + · · ·+ krvr = 0
as a linear system Xk = 0, where X =[
v1 v2 · · · vr
]
. If r 6= n, then the matrix Xis not square, so we cannot use determinants to decide wether the vectors are linearlyindependent. The system is homogeneous, so it has the trivial solution k = 0. It willhave nontrivial solutions if and only if the row echelon forms of X involve free variables.If there are nontrivial solutions, then the vectors are linearly dependent. If there are nofree variables, then k = 0 is the only solution, and hence the vectors must be linearlyindependent.

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 113
Givenv1 = (1,−1, 2, 3), v2 = (−2, 3, 1,−2), v3 = (1, 0, 7, 7)
To determine if the vectors are linearly independent, we reduce the systemXk = 0 to row echelon form
1 −2 1 0−1 3 0 02 1 7 03 −2 7 0
−−→
1 −2 1 00 1 1 00 0 0 00 0 0 0
Since the echelon form involves a free variables k3, there are nontrivial solutionsand hence the vectors must be linearly dependent. ♣
Example 3.27.
To determine whether a set of vectors is linear independent in Rn, we must solve a
homogeneous linear system of equations. A similar situation holds for the vector spacePn.
Determine whether the vectors
p1 = x2 − 2x+ 3, p2 = 2x2 + x+ 8, p3 = x2 + 8x+ 7
form a linear dependent set or a linear independent set.
Example 3.28.
Solution

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 114
Next we consider a very important property of linearly independent vectors. Linearcombinations of linearly independent vectors are unique. More precisely, we have thefollowing theorem.
Let v1, v2, . . ., vn be vectors in a vector space V . A vector v inSpan{v1,v2, . . . ,vn} can be written uniquely as a linear combination of v1,v2, . . ., vn if and only if v1, v2, . . ., vn are linearly independent.
Theorem 3.7.
The following theorem gives two simple facts about linear independence that areimportant to know.
(a) A finite set of vectors that contain the zero vector is linearly dependent.
(b) A set with exactly two vectors is linear independent if and only if neithervector is a scalar multiple of the other.
Theorem 3.8.
The next theorem shows that a linearly independent set in Rn can contain at most
n vectors.
Let S = {v1,v2, . . . ,vr} be a set of vectors in Rn. If r > n, then S is linearly
dependent.
Theorem 3.9.
Remark Theorem 3.9 tells us that a set in R2 with more than two vectors is linearly
dependent and a set in R3 with more than three vectors is linearly dependent.
Linear Independence of Functions
In Example 3.26 a determinant was used to test wether three vectors were linearlyindependent in R
3. Determinants can also be used to help to decide if a set of n vectorsis linearly independent in C(n−1)[a, b]. Indeed, let f1, f2, . . ., fn be elements of C(n−1)[a, b].If these vectors are linearly dependent, then there exist scalars c1, c2, . . ., cn not all zerosuch that
c1f1(x) + c2f2(x) + · · ·+ cnfn(x) = 0 (3.5)
for each x ∈ [a, b]. Taking the derivative with respect to x of both sides of yields
c1f1(x) + c2f2(x) + · · ·+ cnfn(x) = 0

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 115
If we continue taking derivatives of both sides, we end up with the system
c1f1(x) + c2f2(x) + · · ·+ cnfn(x) = 0
c1f′
1(x) + c2f′
2(x) + · · ·+ cnf′
n(x) = 0
......
......
c1f(n−1)1 (x) + c2f
(n−1)2 (x) + · · ·+ cnf
(n−1)n
(x) = 0
For each fixed x ∈ [a, b], the matrix equation
f1(x) f2(x) · · · fn(x)f ′
1(x) f ′
2(x) · · · f ′
n(x)
......
...
f(n−1)1 (x) f
(n−1)2 (x) · · · f
(n−1)n (x)
c1c2...cn
=
00...0
(3.6)
will have the same nontrivial solution (c1, c2, . . . , cn). Thus, if f1, f2, . . ., fn are linearlydependent in C(n−1)[a, b], then, for fixed x ∈ [a, b], the coefficient matrix of system (3.6)is singular, its determinant is zero.
Let f1, f2, . . ., fn be functions in C(n−1)[a, b] and define the function W (x) on[a, b] by
W (x) =
∣
∣
∣
∣
∣
∣
∣
∣
∣
f1(x) f2(x) · · · fn(x)f ′
1(x) f ′
2(x) · · · f ′
n(x)
......
...
f(n−1)1 (x) f
(n−1)2 (x) · · · f
(n−1)n (x)
∣
∣
∣
∣
∣
∣
∣
∣
∣
The function W (x) is called the Wronskian of f1, f2, . . ., fn.
Definition 3.6.
Let f1, f2, . . ., fn be elements of C(n−1)[a, b]. If there exists a point x0 in [a, b]such that W (x0) 6= 0, then f1, f2, . . ., fn are linearly independent.
Theorem 3.10.
Show that 1, ex, and e2x are linearly independent in C(−∞,∞).
Example 3.29.
Solution

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 116
Show that the vectors 1, x, x2, and x3 are linearly independent in P3.
Example 3.30.
Solution
Exercise 3.3
1. Explain why the following are linearly dependent sets of vectors.
(a) v1 = (1,−2, 4) and v2 = (5,−10,−20) in R3
(b) v1 = (3,−1), v2 = (4, 5), v3 = (−4, 7) in R2
(c) p1 = 3− 2x+ x2 and p2 = 6− 4x+ 2x2 in P2
(d) A =
[
−3 42 0
]
and B =
[
3 −4−2 0
]
in M2×2
2. Determine whether the following vectors are linearly independent in R2.
(a) (2, 1), (3, 2) (b) (2, 3), (4, 6)
(c) (−2, 1), (1, 3), (2, 4) (d) (−1, 2), (1,−2), (2,−4)
(e) (1, 2), (−1, 1)
3. Determine whether the following vectors are linearly independent in R3.
(a) (1, 0, 0), (0, 1, 1), (1, 0, 1) (b) (1, 0, 0), (0, 1, 1), (1, 0, 1), (1, 2, 3)
(c) (2, 1,−2), (3, 2,−2), (2, 2, 0) (d) (2, 1,−2), (−2,−1, 2), (4, 2,−4)
(e) (1, 1, 3), (0, 2, 1)
4. Determine whether the following vectors are linearly independent in R4.
(a) (3, 8, 7,−3), (1, 5, 3,−1), (2,−1, 2, 6), (1, 4, 0, 3)
(b) (0, 0, 2, 2), (3, 3, 0, 0), (1, 1, 0,−1)
(c) (0, 3,−3,−6), (−2, 0, 0,−6), (0,−4,−2,−2), (0,−8, 4,−4)
(d) (3, 0,−3, 6), (0, 2, 3, 1), (0,−2,−2, 0), (−2, 1, 2, 1)

MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 117
5. Determine whether the following vectors are linearly independent in M2×2.
(a)
[
1 01 1
]
,
[
0 10 0
]
(b)
[
1 00 1
]
,
[
0 10 0
]
,
[
0 01 0
]
(c)
[
1 00 1
]
,
[
0 10 0
]
,
[
2 30 2
]
6. Determine whether the following vectors are linearly independent in P3.
(a) 1, x2, x2 − 2 (b) 2, x2, x, 2x+ 3
(c) x+ 2, x+ 1, x2 − 1 (d) x+ 2, x2 − 1
7. (a) Show that the vectors v1 = (0, , 3, 1,−1),v2 = (6, 0, 5, 1), and v3 = (4,−7, 1, 3)form a linearly dependent set in R
4
(b) Express each vector as a linear combination of the other two.
8. For which real values of λ do the following vectors form a linear dependent set inR
3?v1 = (λ,−1
2,−1
2), v2 = (−1
2, λ,−1
2), v3 = (−1
2,−1
2, λ)
9. For what values of α will the two vectors cos(x+α) and sin x be linearly dependentin C[−π, π]?
10. Under what conditions is a set with one vector linearly independent?
11. Indicate whether each statement is always true or sometimes false. Justify youranswer by giving a logical argument or a counterexample.
(a) If {v1,v2} is a linearly dependent set, then each vector is a scalar multiple ofthe other.
(b) If {v1,v2,v3} is a linearly independent set, then so is the set{kv1, kv2, kv3} for every nonzero scalar k.
(c) The converse of Theorem 3.8 (a) is also true.
(d) If v1,v2, . . . ,vn span Rn, then they are linearly independent.
(e) If v1,v2, . . . ,vn span a vector space V , then there are linearly independent.
(f) If v1,v2, . . . ,vr are vectors in a vector space V and
Span{v1,v2, . . . ,vr} = Span{v1,v2, . . . ,vr−1}
then v1,v2, . . . ,vr are linearly dependent.
MA131 (Section 750002): Prepared by Asst.Prof.Dr. Archara Pacheenburawana 118
Answer to Exercise 3.3
1. (a) v2 is a scalar multiple of v1.
(b) The vectors are linear dependent by Theorem 3.9.
(c) p2 is a scalar multiple of p1.
(d) B is a scalar multiple of A.
2. (a), (e) 3. (a), (e) 4. (a), (b), (c), (d) 5. (a), (b) 6. (c), (d)
7. (b) v1 =27v2 −
37v3, v2 =
72v1 +
32v3, v3 = −7
3v1 +
23v2
8. λ = −12, λ = 1 9. When α is an odd multiple of π/2.
10. If and only if the vector is not zero.
11. (a) False (b) True (c) False (d) True (e) False (f) True