chapter 7 localization & positioning 2015/9/71. means for a node to determine its physical...
TRANSCRIPT
Chapter 7Localization & Positioning
112/04/191
Means for a node to determine its physical position with respect to some coordinate system (50, 27) or symbolic location (in a living room)
Using the help of Anchor nodes that know their position Directly adjacent nodes Over multiple hops
Goals of this chapter
112/04/192
7.1 Properties of localization and positioning procedures
7.2 Possible approaches 7.3 Mathematical basics for the lateration problem 7.4 Positioning in multi-hop environments 7.5 Positioning assisted by anchors
Outline
112/04/193
Physical position versus logical location Coordinate system: position Symbolic reference: location
Absolute versus relative coordinate Centralized or distributed computation Localized versus centralized computation Limitations: GPS for example, does not work indoors Scale (indoors, outdoors, global, …)
7.1 Properties of localization and positioning procedures
112/04/194
Accuracy how close is an estimated position to the real
position? Precision
the ratio with which a given accuracy is reached Costs, energy consumption, …
Properties of localization and positioning procedures (cont.)
112/04/195
Proximity A node wants to determine its position or location in the proximity of an
anchor
(Tri-/Multi-) lateration and angulation Lateration : when distances between nodes are used Angulation: when angles between nodes are used
Scene analysis The most evident form of it is to analyze pictures taken by a camera Other measurable characteristic ‘fingerprints’ of a given location can be
used for scene analysis e.g., RADAR
Bounding box to bound the possible positions of a node
7.2 Possible approaches
112/04/196
Using information of a node’s neighborhood Exploit finite range of wireless communication
e.g., easy to determine location in a room with infrared (room number announcements)
Proximity (range-free approach)
112/04/197
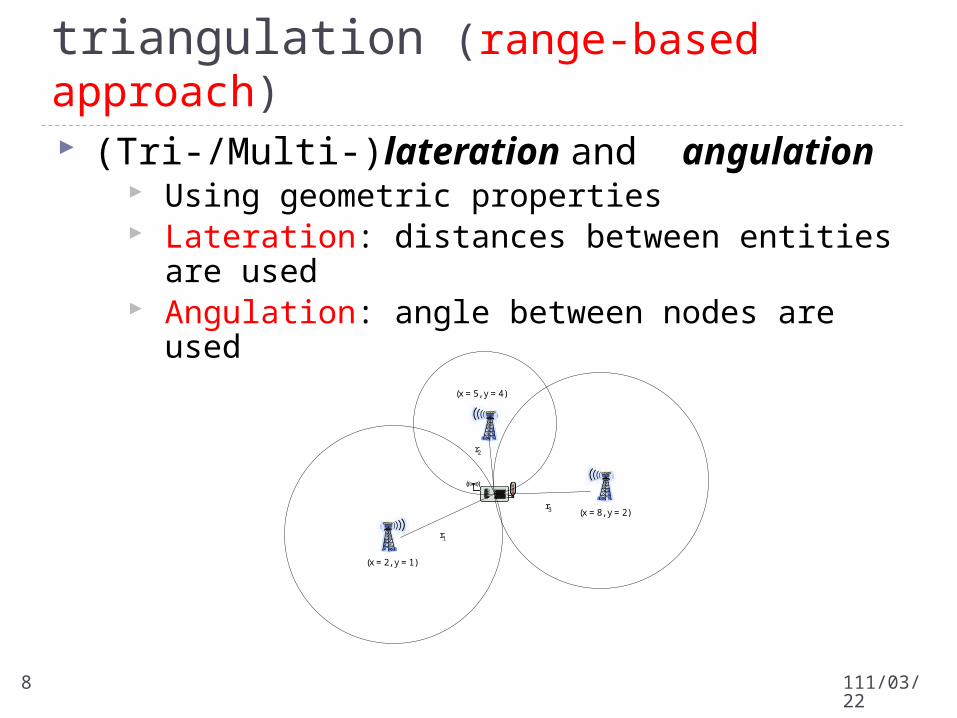
(Tri-/Multi-)lateration and angulation Using geometric properties Lateration: distances between entities are used Angulation: angle between nodes are used
(x = 2, y = 1)
(x = 8, y = 2)
(x = 5, y = 4)
r1
r2
r3
Trilateration and triangulation (range-based approach)
112/04/198
To use (multi-)lateration, estimates of distances to anchor nodes are required.
This ranging process ideally leverages the facilities already present on a wireless node, in particular, the radio communication device.
The most important characteristics are Received Signal Strength Indicator (RSSI), Time of Arrival (ToA), and Time Difference of Arrival (TDoA).
Trilateration and triangulation (cont.)Determining distances
112/04/199
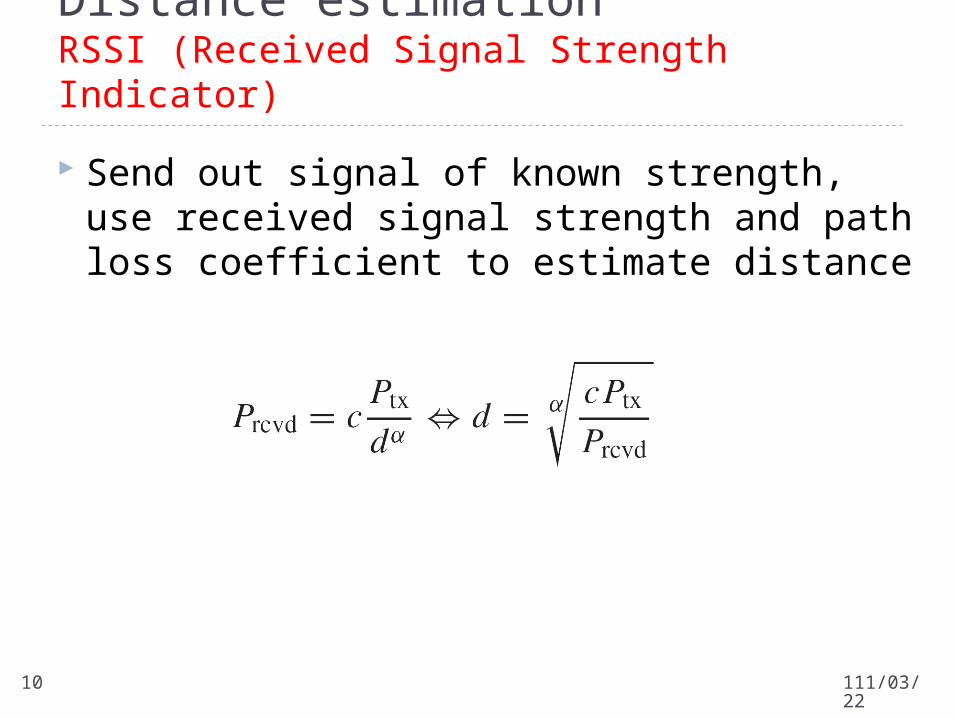
Send out signal of known strength, use received signal strength and path loss coefficient to estimate distance
Distance estimation RSSI (Received Signal Strength Indicator)
112/04/1910
Problem: Highly error-prone process : Caused by fast fading, mobility of the environment Solution: repeated measurement and filtering out incorrect
values by statistical techniques Cheap radio transceivers are often not calibrated
Same signal strength result in different RSSI Actual transmission power different from the intended power Combination with multipath fading Signal attenuation along an indirect path is higher than along
a direct path Solution: No!
Distance estimationRSSI (cont.)
112/04/1911
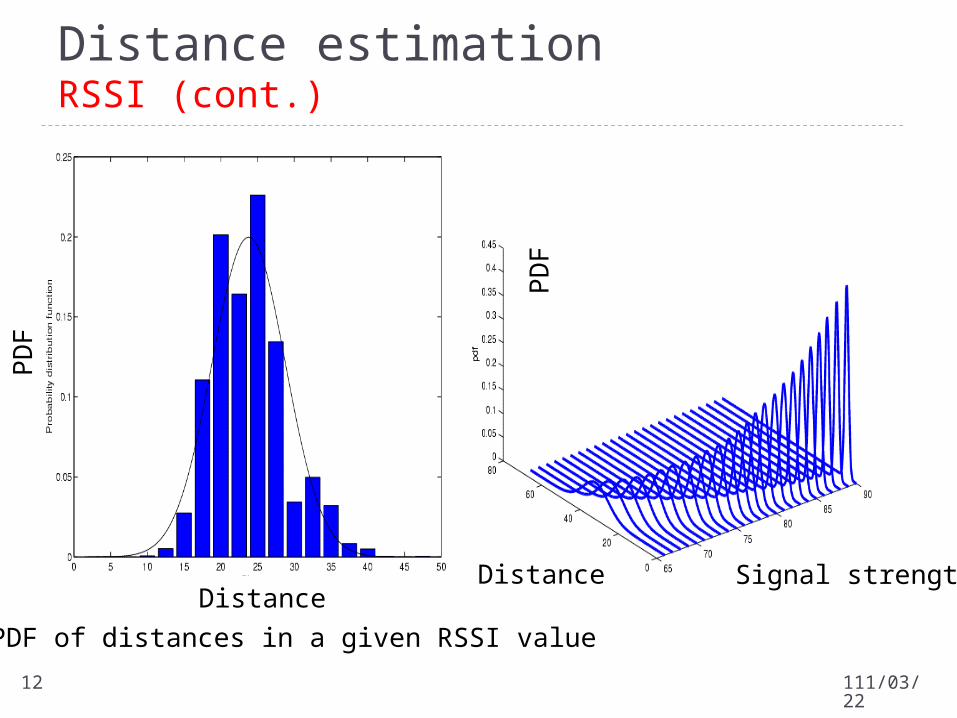
Distance estimationRSSI (cont.)
DistanceDistance Signal strength
PD
F
PD
F
PDF of distances in a given RSSI value
112/04/1912
Use time of transmission, propagation speed
Problem: Exact time synchronization Usually, sound wave is used But propagation speed of sound depends on
temperature or humidity
Distance estimation ToA (Time of arrival )
112/04/1913
Use two different signals with different propagation speeds Compute difference between arrival times to compute
distance Example: ultrasound and radio signal (Cricket System)
Propagation time of radio negligible compared to ultrasound
Problem: expensive/energy-intensive hardware
Distance estimationTDoA (Time Difference of Arrival )
112/04/1914
RADAR system: Comparing the received signal characteristics from multiple anchors with premeasured and stored characteristics values.
Radio environment has characteristic “fingerprints” The necessary off-line deployment for measuring the
signal landscape cannot always be accommodated in practical systems.
Scene analysis
112/04/1915
Bounding Box
The bounding box method proposed in uses squares instead of circles as in tri-lateration
to bound the possible positions of a node.
For each reference node i, a bounding box is defined as a square with its center at the position of this node (xi, yi), with sides of size 2di (where d is the estimated distance) and with coordinates (xi –di, yi–di) and (xi+di, yi+di).
112/04/1916
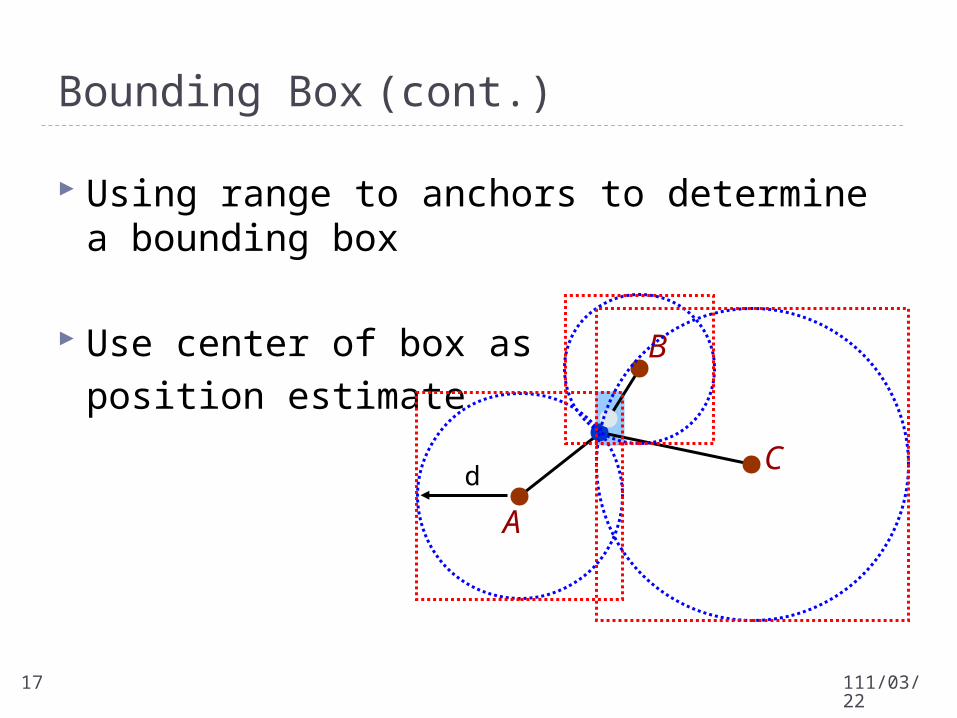
Bounding Box (cont.)
Using range to anchors to determine a bounding box
Use center of box as
position estimate
C
A
B
d
112/04/1917
References N. Bulusu, J. Heidemann, and D. Estrin. “GPS-Less Low Cost
Outdoor Localization For Very Small Devices,” IEEE Personal Communications Magazine, 7(5): 28–34, 2000.
C. Savarese, J. Rabay, and K. Langendoen. “Robust Positioning Algorithms for Distributed Ad-Hoc Wireless Sensor Networks,” In Proceedings of the Annual USENIX Technical Conference, Monterey, CA, 2002.
A. Savvides, C.-C. Han, and M. Srivastava. “Dynamic Fine-Grained Localization in Ad-Hoc Networks of Sensors,” Proceedings of the 7th Annual International Conference on Mobile Computing and Networking, pages 166–179. ACM press, Rome, Italy, July 2001.
S. Simic and S. Sastry, “Distributed localization in wireless ad hoc networks,” UC Berkeley, Tech. rep. UCB/ERL M02/26, 2002.
112/04/1918
7.3 Mathematical basics for the lateration problem
112/04/1919
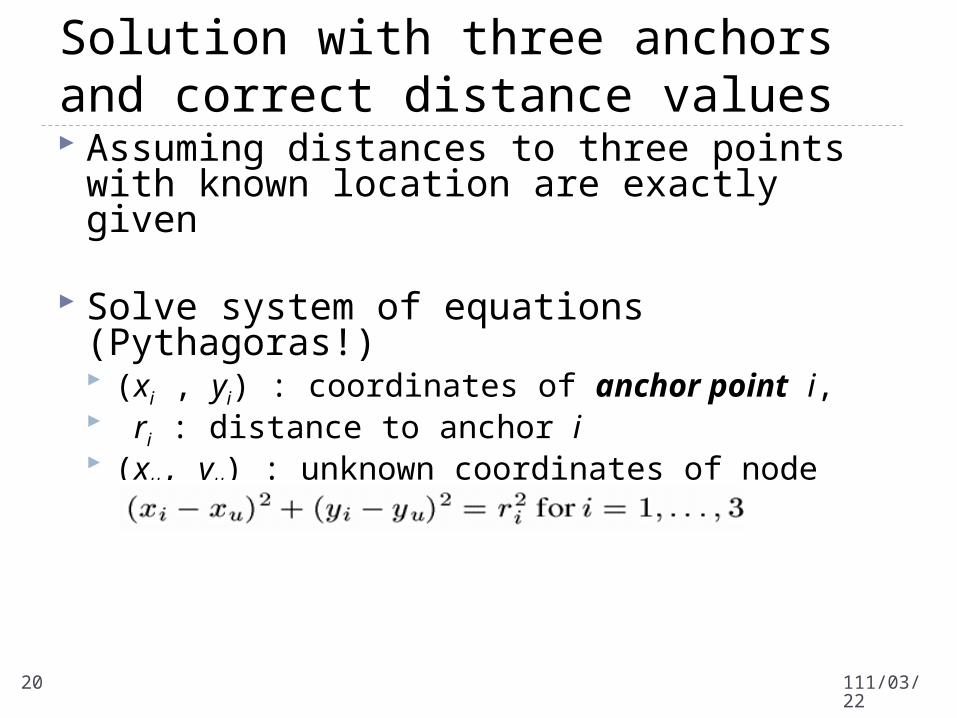
Solution with three anchors and correct distance values Assuming distances to three points with known
location are exactly given
Solve system of equations (Pythagoras!) (xi , yi) : coordinates of anchor point i, ri : distance to anchor i (xu, yu) : unknown coordinates of node
112/04/1920
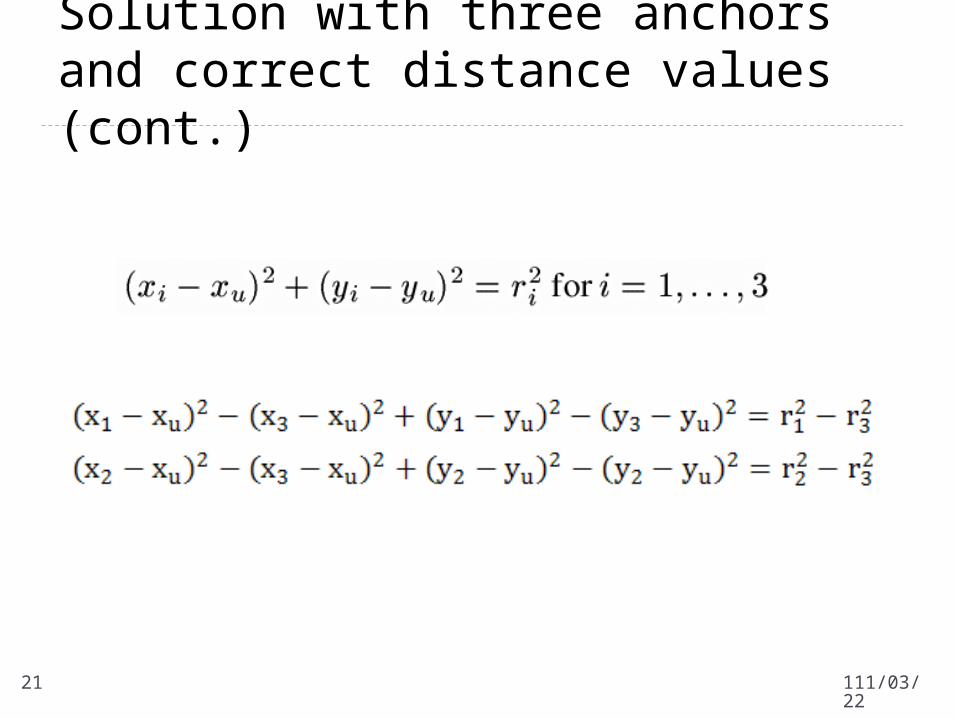
Solution with three anchors and correct distance values (cont.)
112/04/1921
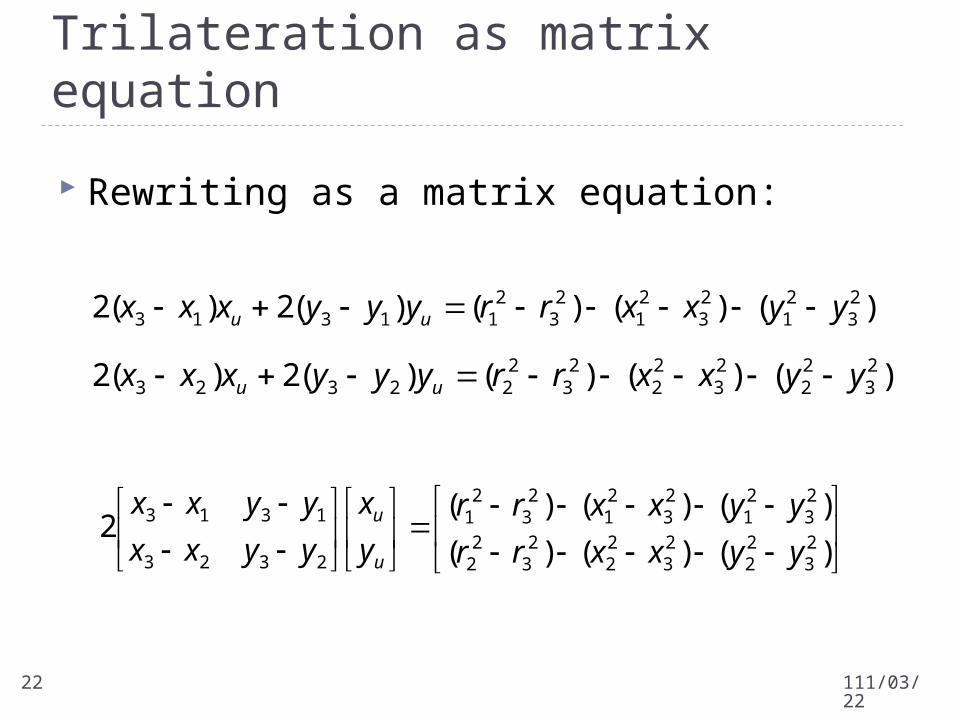
Rewriting as a matrix equation:
Trilateration as matrix equation
)()()(
)()()(2
23
22
23
22
23
22
23
21
23
21
23
21
2323
1313
yyxxrr
yyxxrr
y
x
yyxx
yyxx
u
u
)()()()(2)(2 23
21
23
21
23
211313 yyxxrryyyxxx uu
)()()()(2)(2 23
22
23
22
23
222323 yyxxrryyyxxx uu
112/04/1922
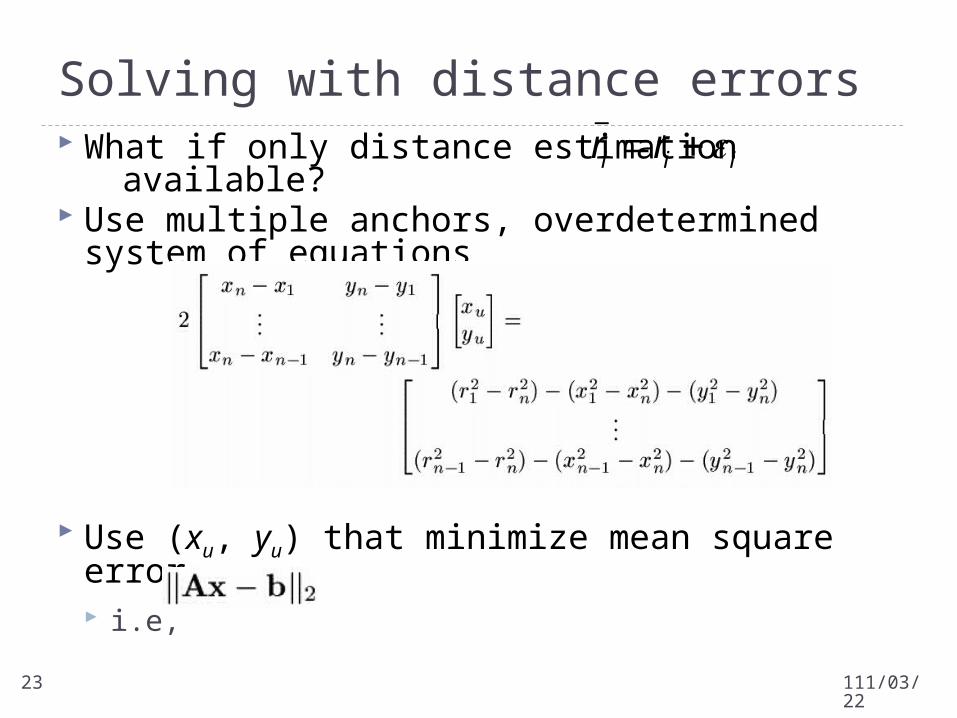
What if only distance estimation available? Use multiple anchors, overdetermined system of
equations
Use (xu, yu) that minimize mean square error, i.e,
Solving with distance errors
iii rr _
112/04/1923
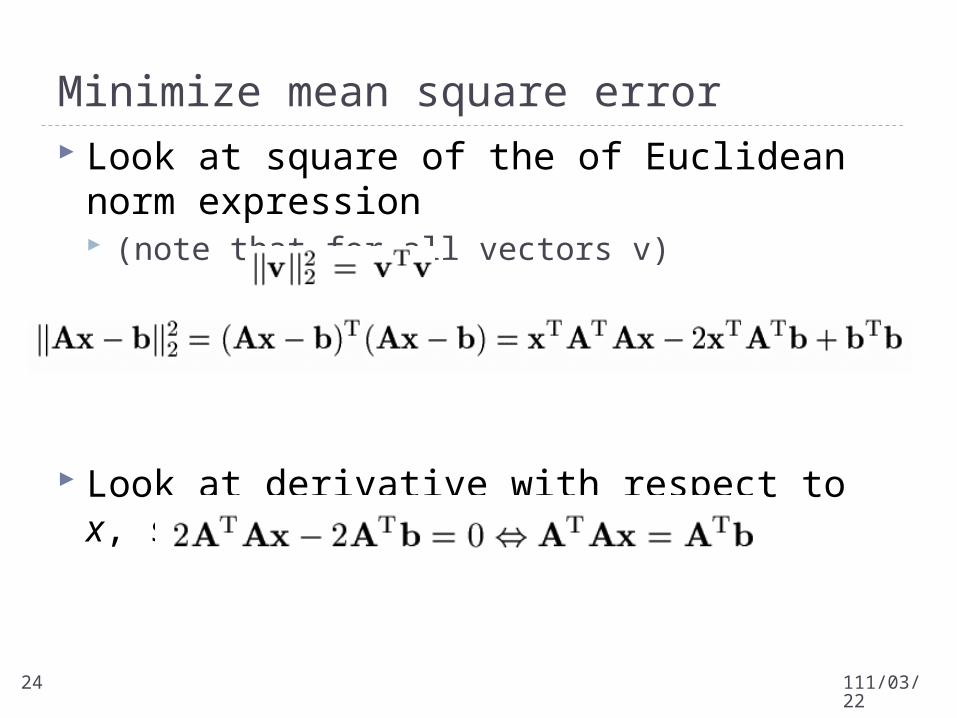
Look at square of the of Euclidean norm expression (note that for all vectors v)
Look at derivative with respect to x, set it equal to 0
Minimize mean square error
112/04/1924
7.4 Positioning in multi-hop environments
112/04/1925
Assume that the positions of n anchors are known and the positions of m nodes is to be determined, that connectivity between any two nodes is only possible if nodes are at most R distance units apart, and that the connectivity between any two nodes is also known
The fact that two nodes are connected introduces a constraint to the feasibility problem – for two connected nodes, it is impossible to choose positions that would place them further than R away
Connectivity in a multi-hop network
112/04/1926
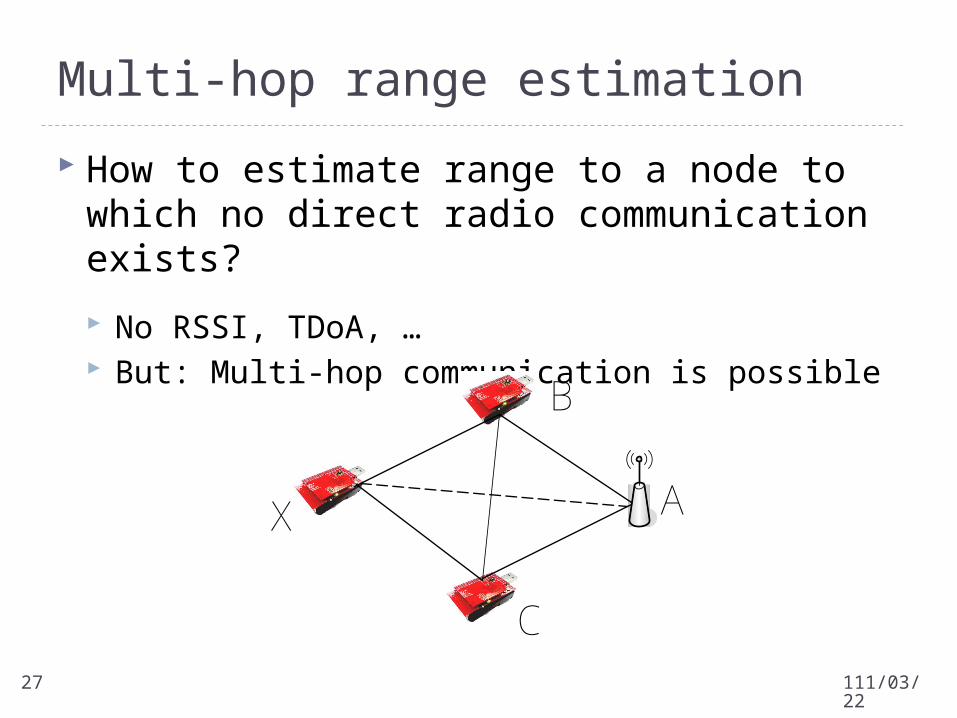
Multi-hop range estimation
How to estimate range to a node to which no direct radio communication exists?
No RSSI, TDoA, … But: Multi-hop communication is possible
A
C
B
X
112/04/1927
Multi-hop range estimation (cont.)
Idea 1: (DV-Hop) Start by counting hops between anchors then divide known distance
Count Shortest hop numbers between all two nodes. Each anchors estimate hop length and propagates to the
network. Node calculates its position based on average hop length and
shortest path to each anchor.
112/04/1928
DV Hop
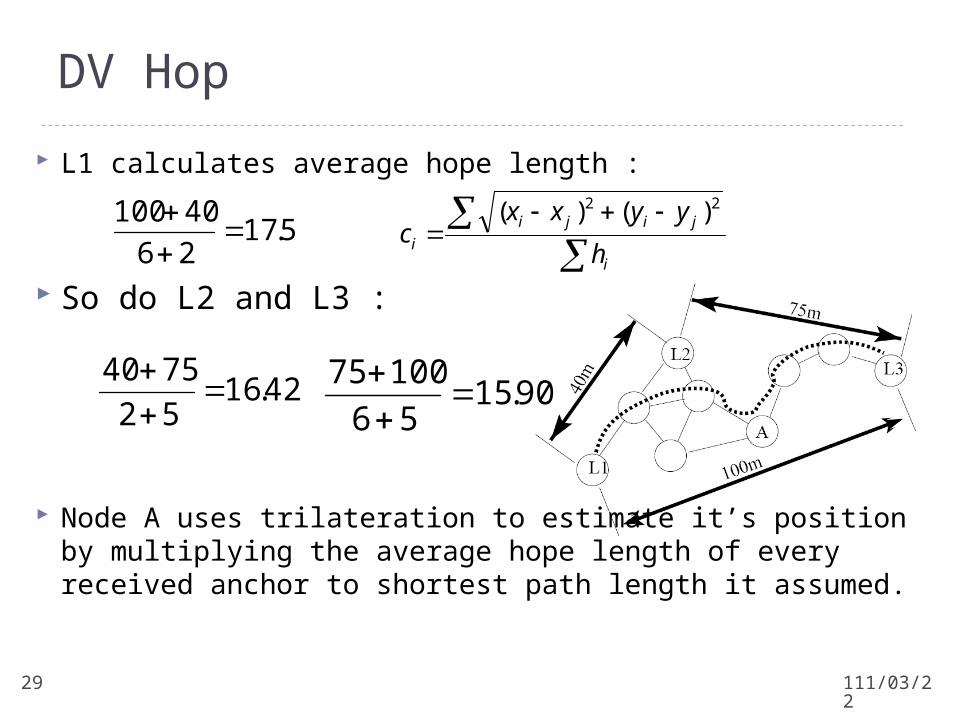
L1 calculates average hope length :
So do L2 and L3 :
Node A uses trilateration to estimate it’s position by multiplying the average hope length of every received anchor to shortest path length it assumed.
5.1726
40100
42.1652
7540
90.1556
10075
i
jiji
i h
yyxxc
22 )()(
112/04/1929
DV-Distance
Idea 2: If range estimates between neighbors exist, use them to improve total length of route estimation in previous method (DV-Distance)
Distance between neighboring nodes is measured using radio signal strength and is propagated in meters rather than in hops.
The algorithm uses the same method to estimate but shortest distance length are assumed.
112/04/1930
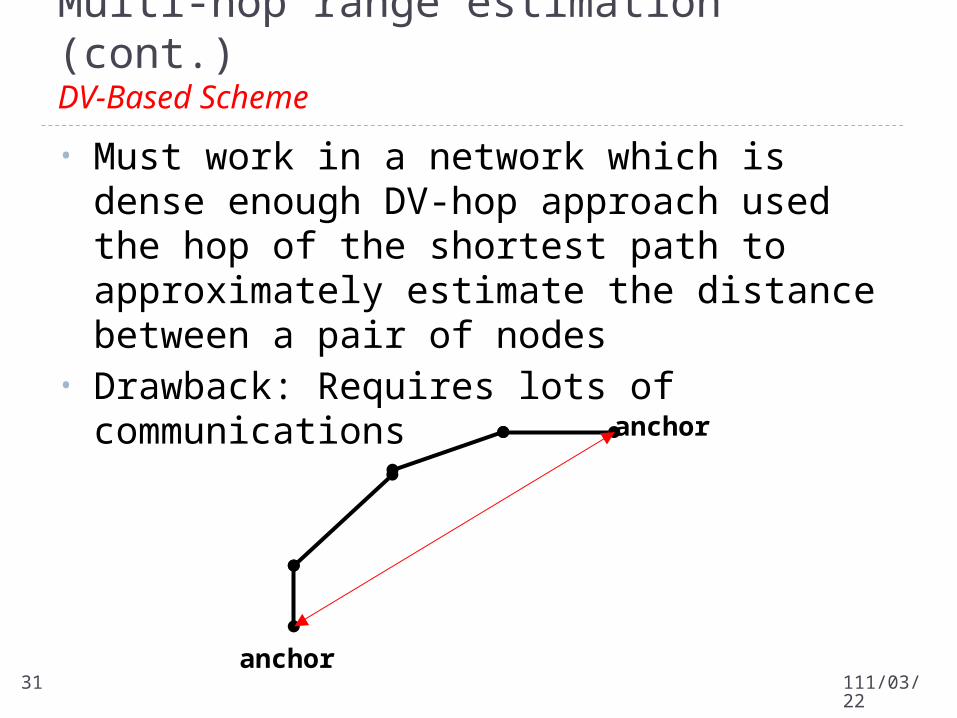
• Must work in a network which is dense enough DV-hop approach used the hop of the shortest path to approximately estimate the distance between a pair of nodes
• Drawback: Requires lots of communications
anchor
anchor
Multi-hop range estimation (cont.) DV-Based Scheme
112/04/1931
Number of anchors Euclidean method increase accuracy as the number of
anchors goes up The “distance vector”-like methods are better suited for a
low-ratio of anchors Uniformly distributed network
Distance vector methods perform less well in non-uniformly networks
Euclidean method is not very sensitive to this effect
Discussion
112/04/1932
7.5 Positioning assisted by anchors
112/04/1933
By pure connectivity information Idea: decide whether a node is within or outside of a
triangle formed by any three anchors However, moving a sender node to determine its
position is hardly practical ! Solution:
inquire all its neighbors about their distance to the given three corner anchors
APIT (Approximate Point in Triangle)
112/04/1934
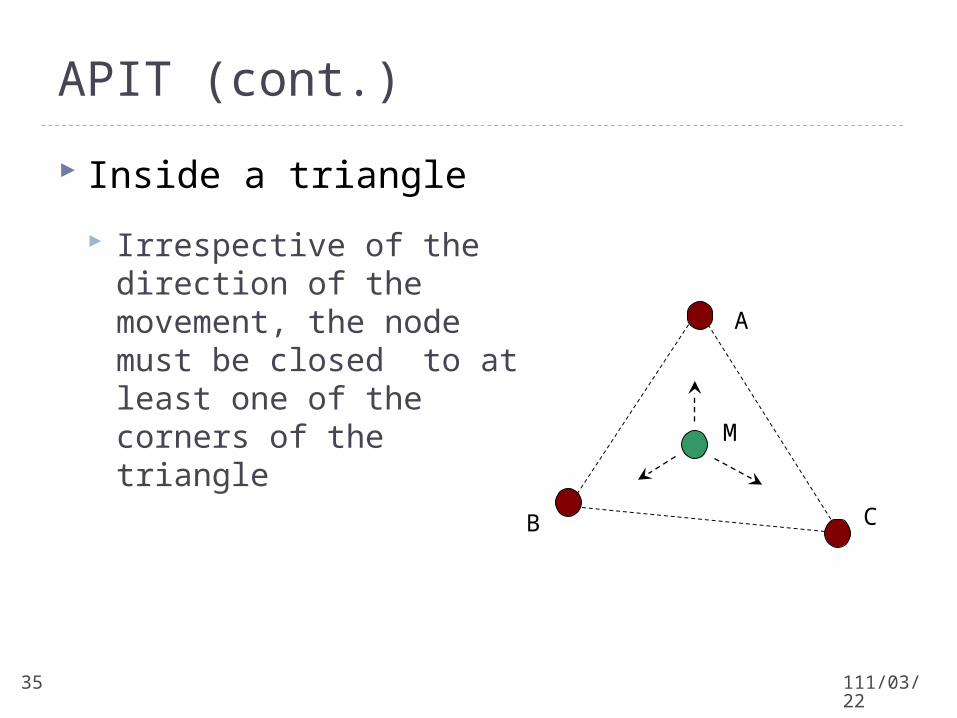
APIT (cont.)
Inside a triangle
Irrespective of the direction of the movement, the node must be closed to at least one of the corners of the triangle
A
CB
M
112/04/1935
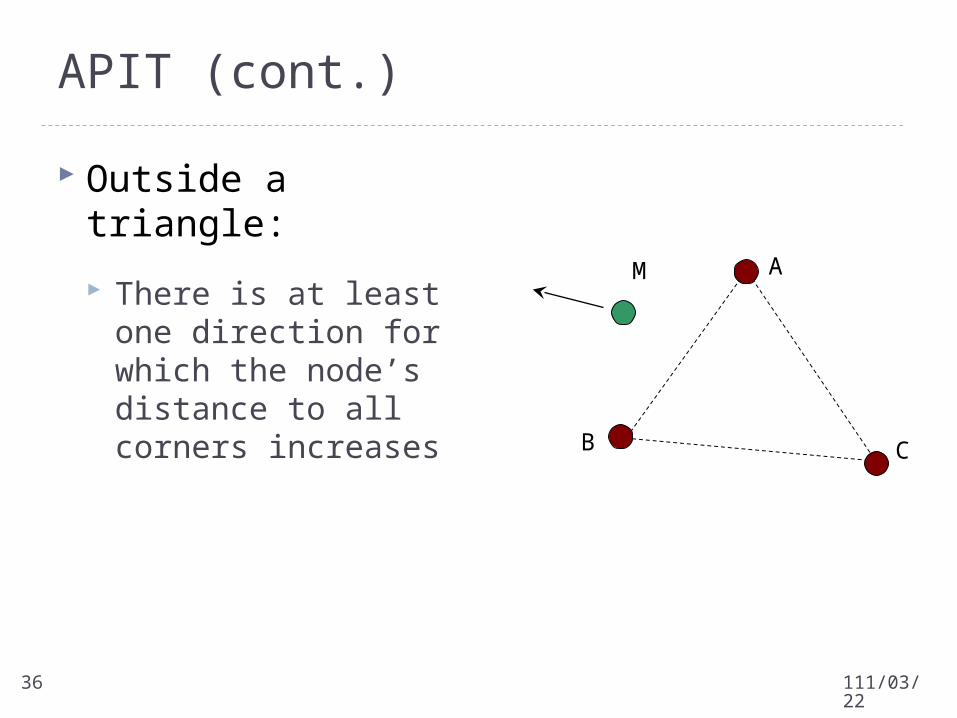
APIT (cont.)
Outside a triangle:
There is at least one direction for which the node’s distance to all corners increases
A
CB
M
112/04/1936
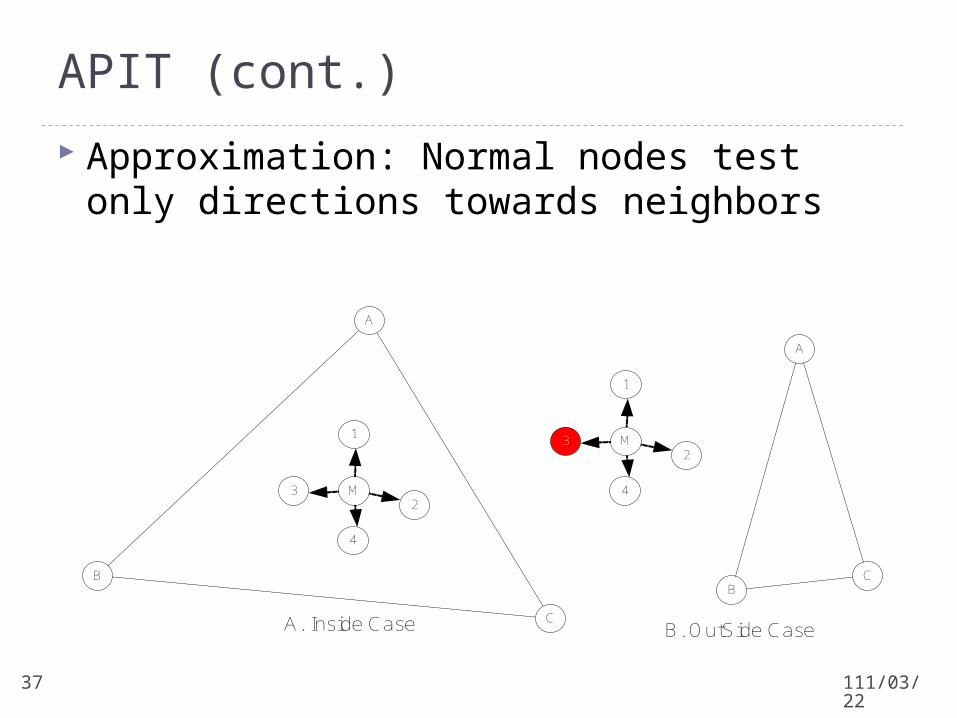
Approximation: Normal nodes test only directions towards neighbors
A
C
1
23
4
M
B
A
CB
A. Inside Case B. OutSide Case
1
23
4
M
APIT (cont.)
112/04/1937
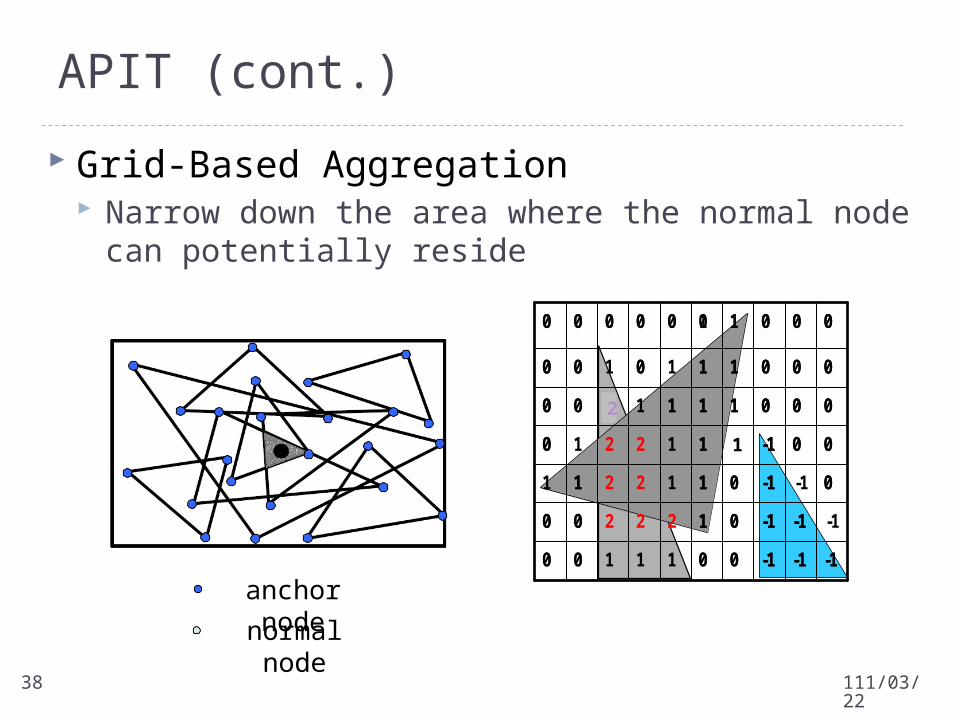
Grid-Based Aggregation Narrow down the area where the normal node can potentially
reside
-1-1-10011100
-1-1-10122200
0-1-10112211
00-10112210
0001111100
0001110100
0001000000
-1-1-10000
-1-10100
0-1011
00-1010
00011100
00011000
0001100000
anchor node
normal node
1
2
APIT (cont.)
112/04/1938
112/04/19 39
MCL (Monte-Carlo Localization)
Assumptions Time is divided into several time slots Moving distance in each time slot is randomly chosen from
[0 , Vmax ] Each anchor node periodically forwards its location to two-
hop neighbors Notation
R - communication range
112/04/1939
112/04/19 40
MCL (cont.)
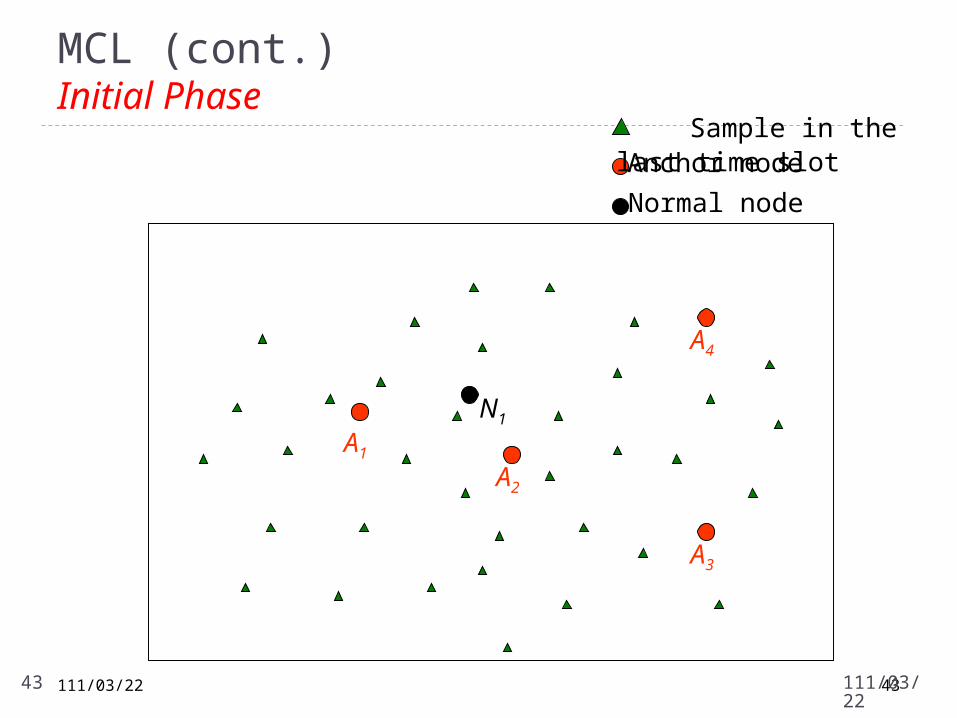
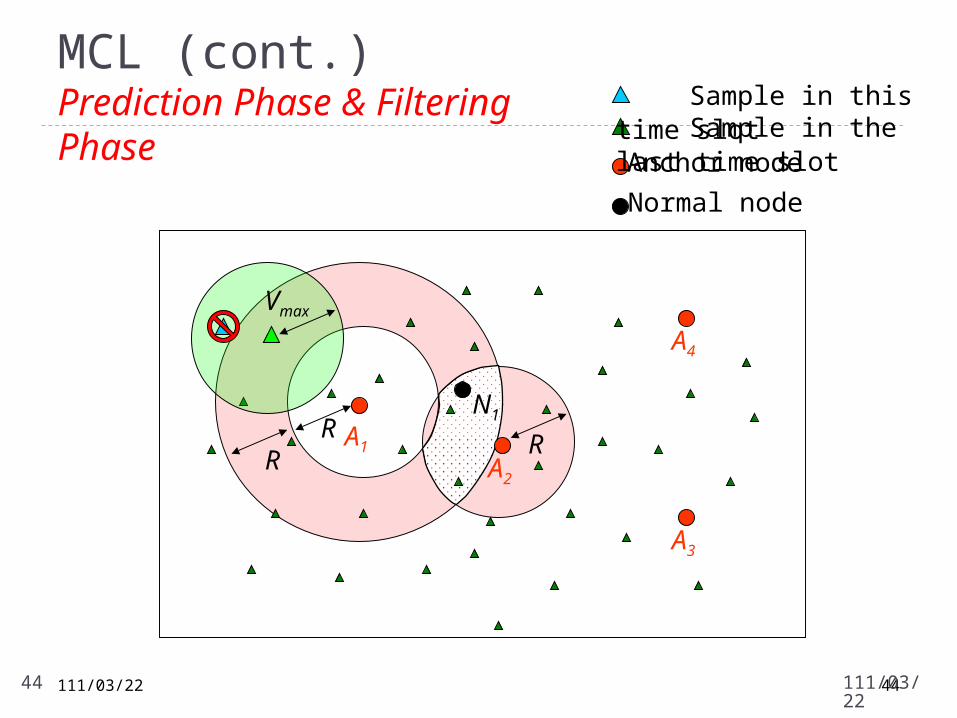
Each normal node maintains 50 samples in each time slot Samples represent the possible locations The sample selection is based on previous samples Sample (x , y) must satisfy some constraints
Located in the anchor constraints
112/04/1940
112/04/19 41
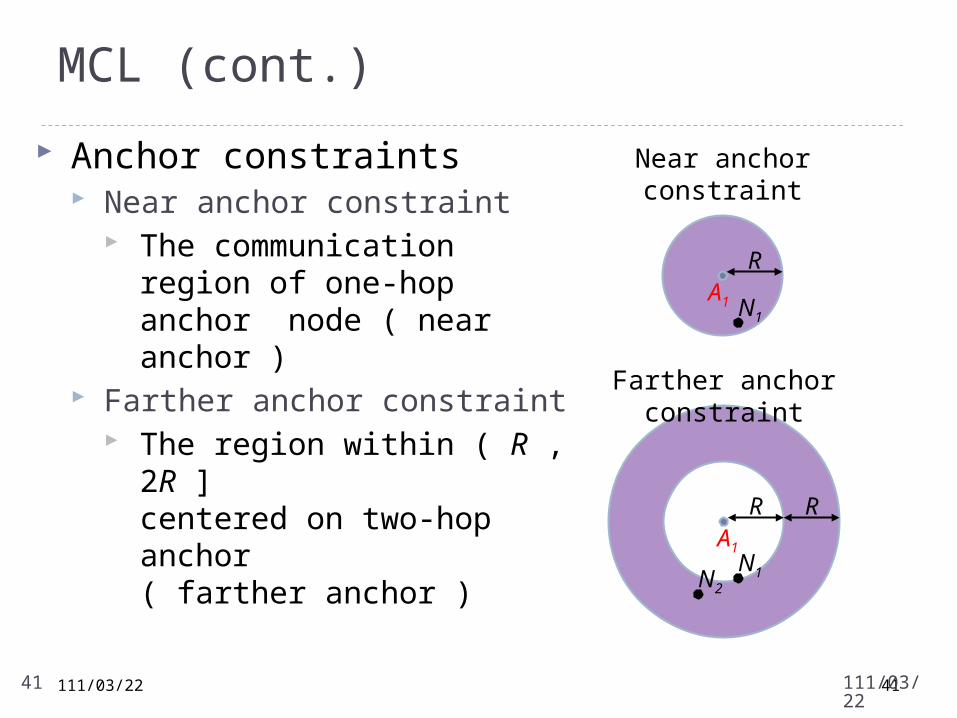
MCL (cont.)
Anchor constraints Near anchor constraint
The communication region of one-hop anchor node ( near anchor )
Farther anchor constraint The region within ( R , 2R ]
centered on two-hop anchor ( farther anchor )
Near anchor constraint
RA1
RR
Farther anchor constraint
A1
N1
N1N2
112/04/1941
112/04/19 42
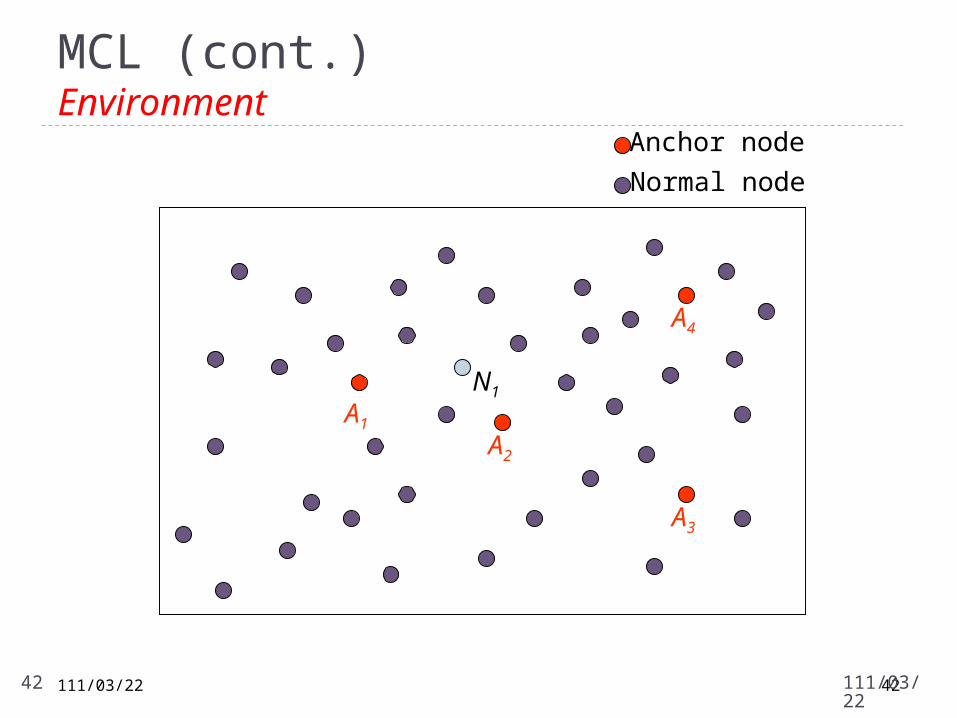
MCL (cont.)Environment
Anchor node
Normal node
A1
A2
A3
A4
N1
112/04/1942
112/04/19 43
MCL (cont.)Initial Phase
N1
A1
A2
A3
A4
Anchor node
Normal node
Sample in the last time slot
112/04/1943
112/04/19 44
RR
R
MCL (cont.)Prediction Phase & Filtering Phase
N1
A1
A2
A3
A4
Vmax
Anchor node
Normal node
Sample in the last time slot Sample in this time slot
112/04/1944
112/04/19 45
R
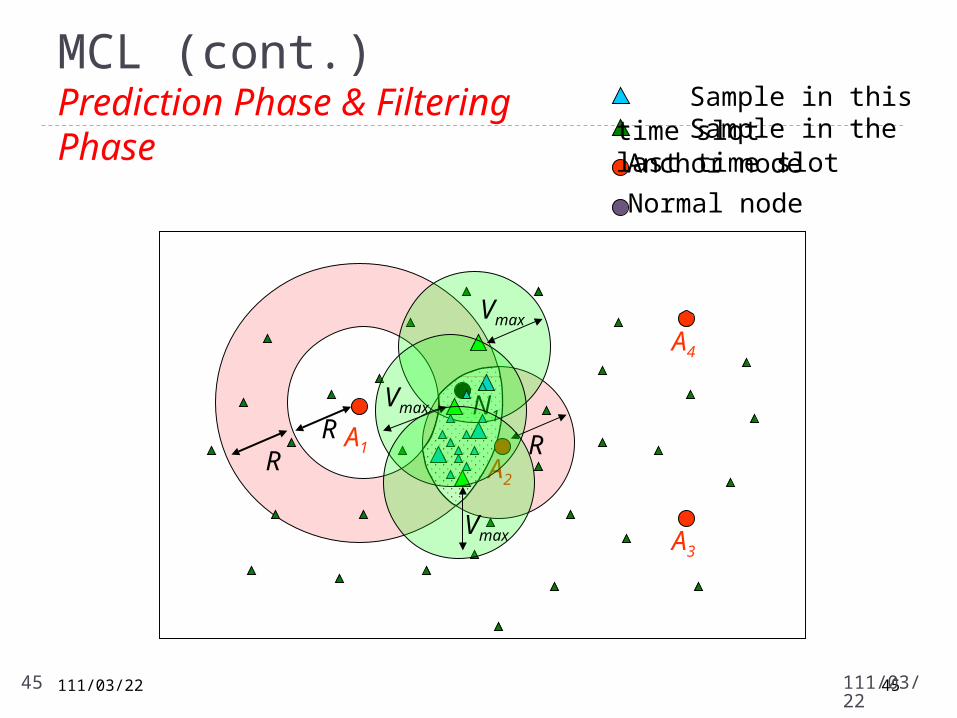
MCL (cont.)Prediction Phase & Filtering Phase
N1
A1
A2
A3
A4
Vmax
Vmax
Vmax
Anchor node
Normal node
RR
Sample in the last time slot Sample in this time slot
112/04/1945
112/04/19 46
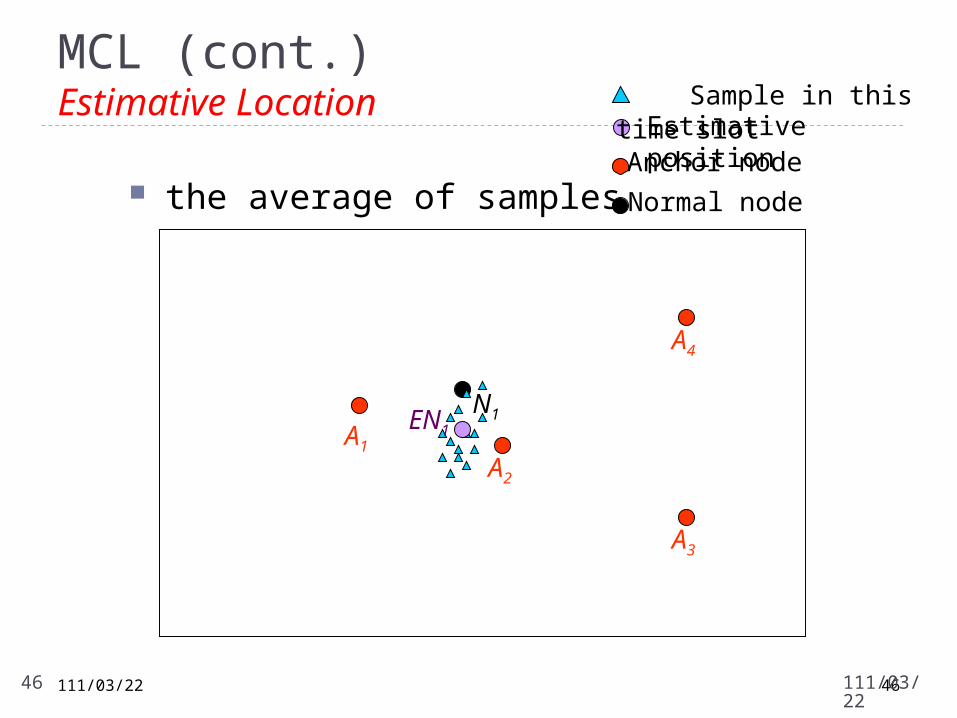
MCL (cont.)Estimative Location
N1
A1
A2
A3
A4
the average of samples
EN1
Anchor node
Normal node
Estimative position Sample in this time slot
112/04/1946
112/04/19 47
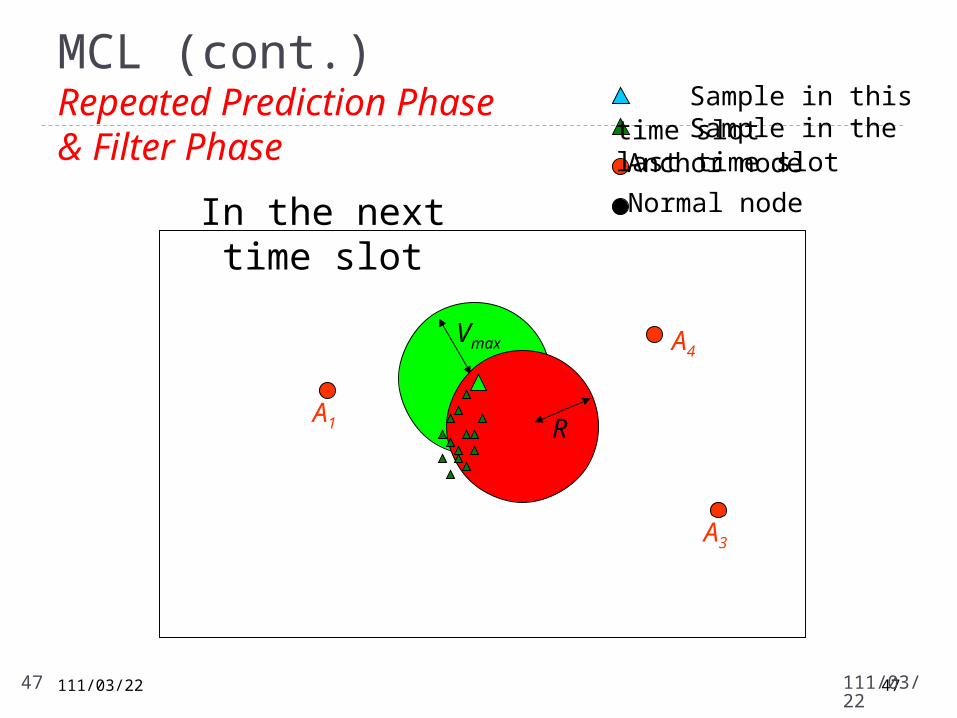
MCL (cont.) Repeated Prediction Phase & Filter Phase
Vmax
N1A1
A2
A3
A4
R
In the next time slot
Anchor node
Normal node
Sample in the last time slot Sample in this time slot
112/04/1947
There are three phases in the DRLS algorithm.
Phase 1 – Beacon exchange
Phase 2 – Using improved grid-scan algorithm to get initial estimative location
Phase 3 – Refinement
DRLS Distributed Range-Free Localization Scheme
112/04/1948
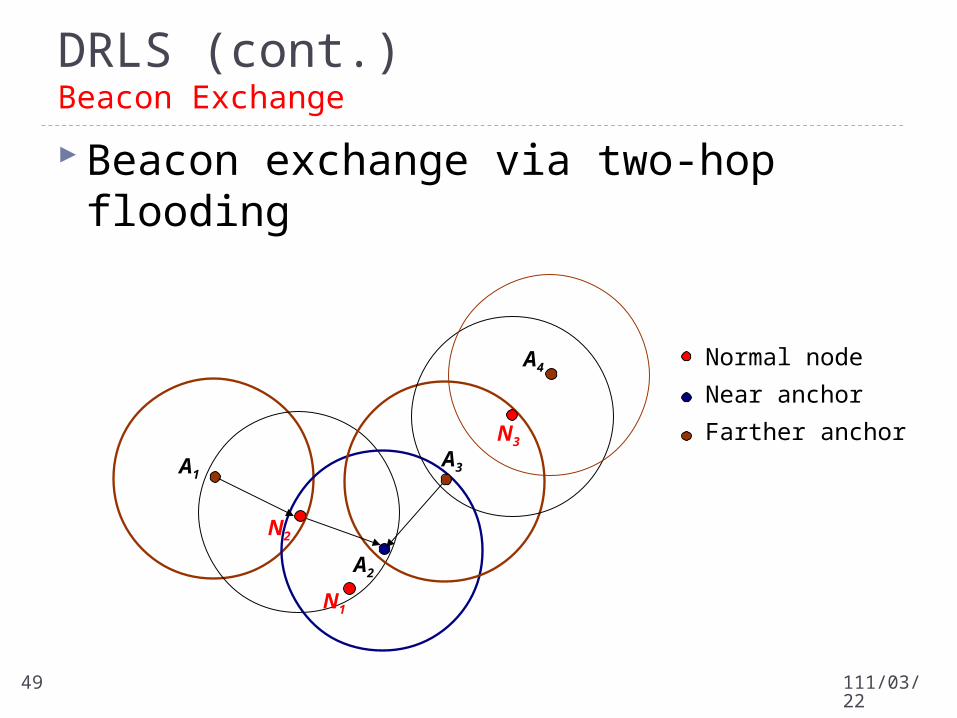
Beacon exchange via two-hop flooding
N1
Near anchor
Normal node
A1
A2
A3
A4
N2
N3 Farther anchor
DRLS (cont.)Beacon Exchange
112/04/1949
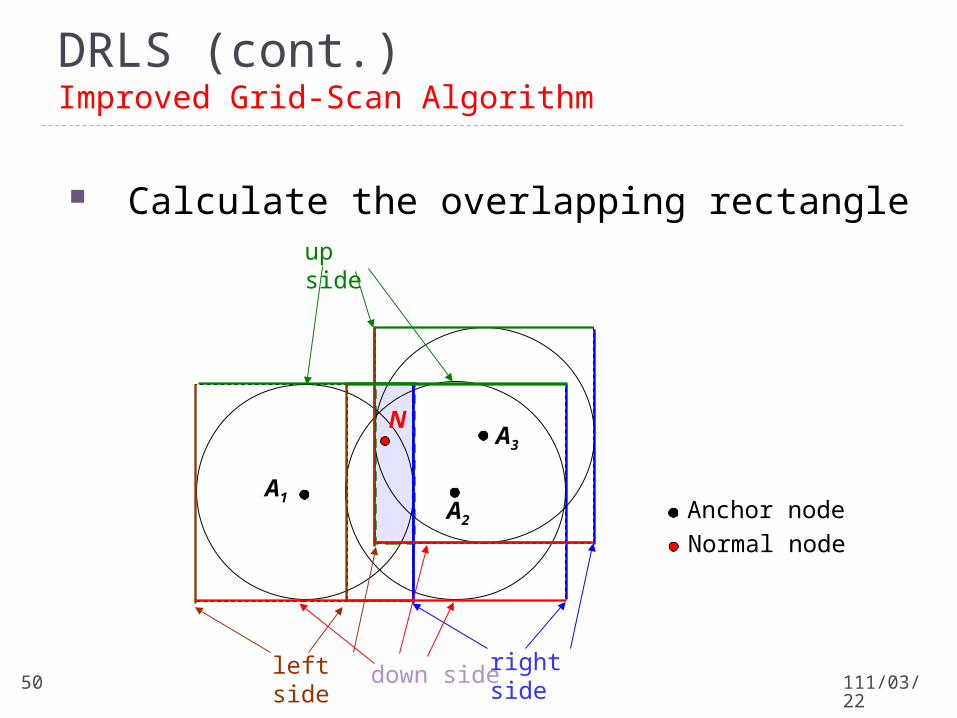
DRLS (cont.)Improved Grid-Scan Algorithm
A2
A3
A1
N
Normal node
Anchor node
right sideleft side
up side
down side
Calculate the overlapping rectangle
112/04/1950
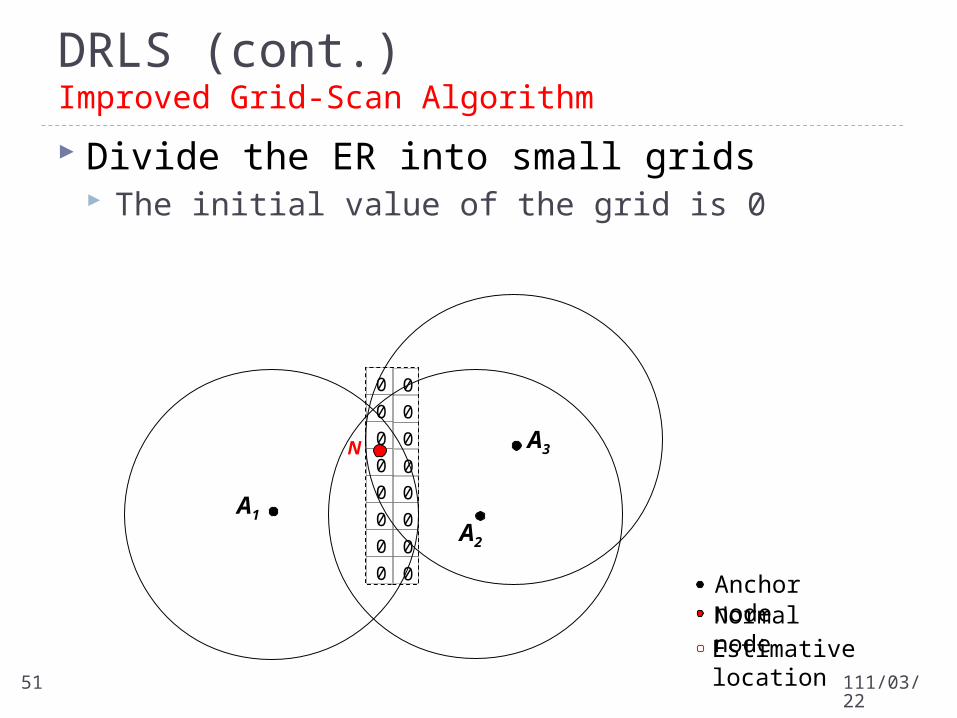
DRLS (cont.)Improved Grid-Scan Algorithm
Divide the ER into small grids The initial value of the grid is 0
0
0
0
0
00
0 0
0
A2
A3
A1
0 0
0
0
0
0
N
0
Anchor nodeNormal node
Estimative location112/04/1951
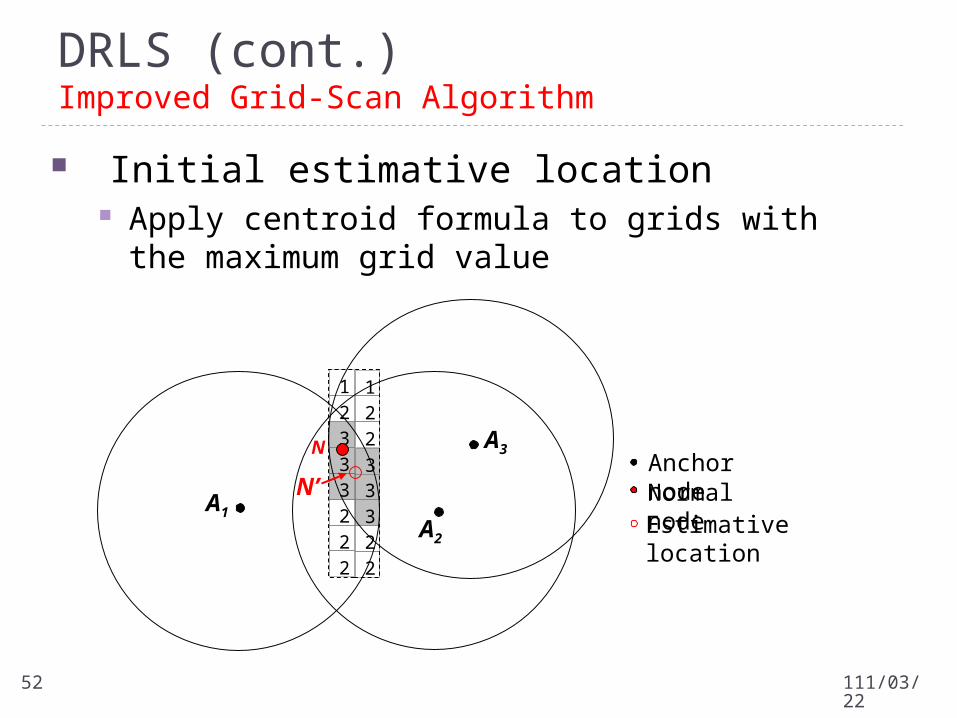
DRLS (cont.)Improved Grid-Scan Algorithm
2
2
2
3
333 3
3
A2
A3
A1
1 1
2
2
2
2
N
N’2
Anchor nodeNormal nodeEstimative location
Initial estimative location Apply centroid formula to grids with the maximum grid
value
112/04/1952
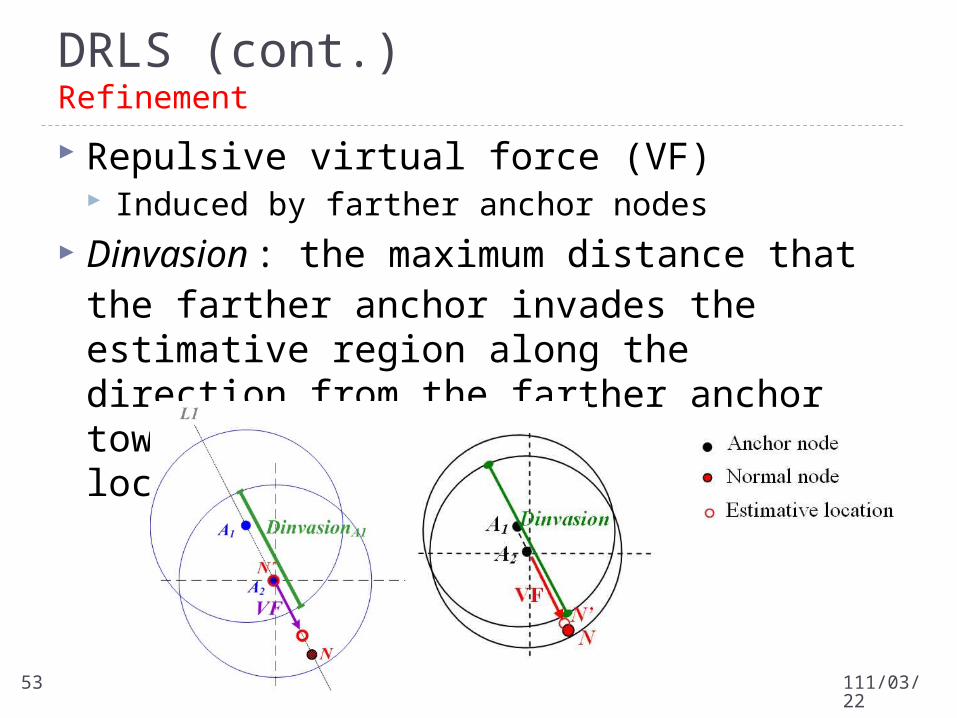
Repulsive virtual force (VF) Induced by farther anchor nodes
Dinvasion : the maximum distance that the farther anchor invades the estimative region along the direction from the farther anchor towards the initial estimative location
DRLS (cont.)Refinement
112/04/1953
VFA3
DinvasionA3
VFA4
DinvasionA4
VFA5
DinvasionA5
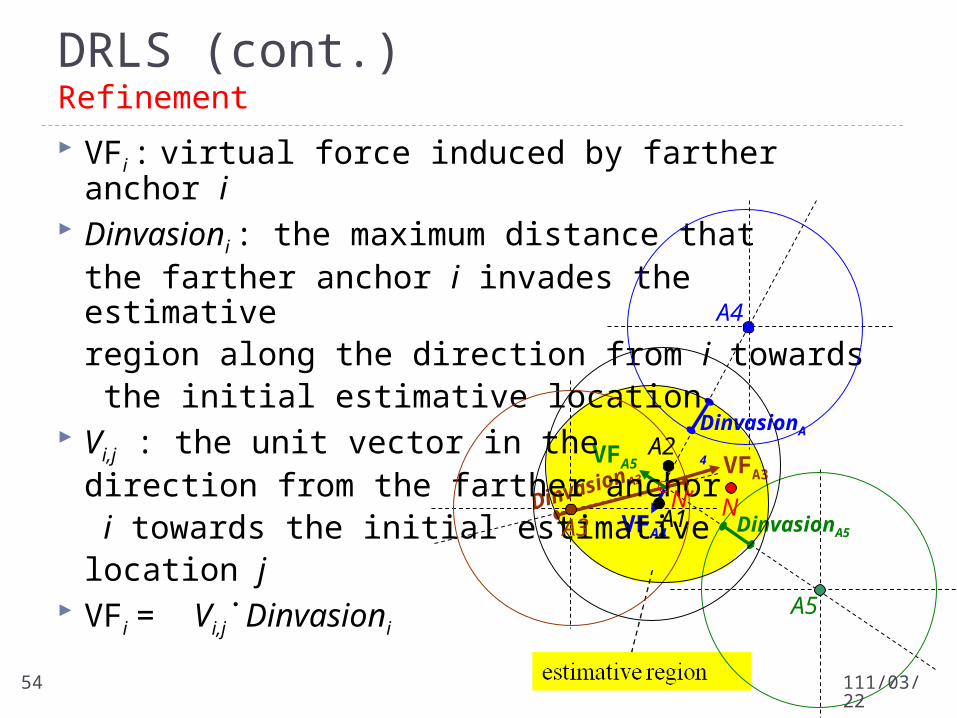
VFi : virtual force induced by farther anchor i Dinvasioni : the maximum distance that
the farther anchor i invades the estimative region along the direction from i towards the initial estimative location
Vi,j : the unit vector in the direction from the farther anchor i towards the initial estimative location j
VFi = Vi,j˙Dinvasioni
A4
A5
A1
A2
NN’A3
DRLS (cont.)Refinement
112/04/1954
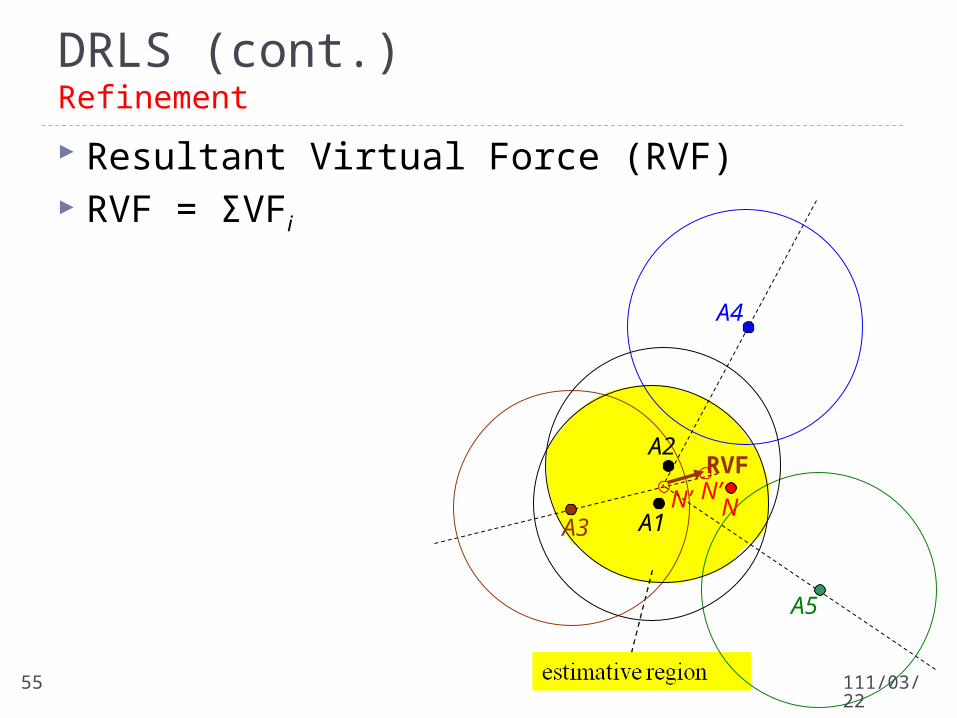
RVF
Resultant Virtual Force (RVF) RVF = ΣVFi
A4
A5
A1
A2
NN’A3
N’
DRLS (cont.)Refinement
112/04/1955
DA3max
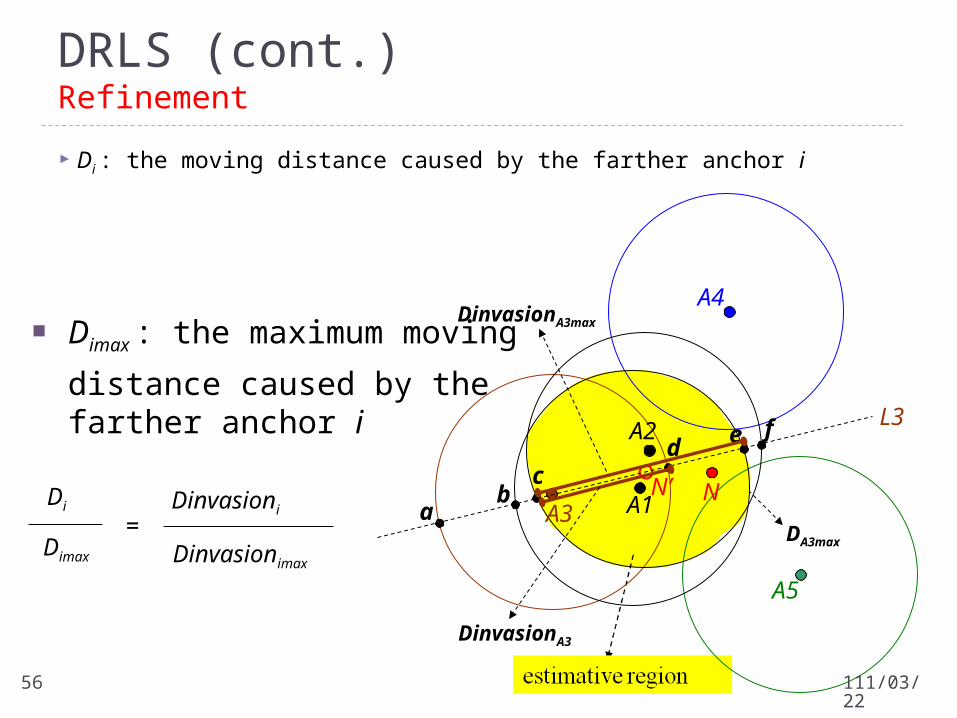
Dimax : the maximum moving
distance caused by the farther anchor i
Di : the moving distance caused by the farther anchor i
A4
A5
A1
A2
NN’A3
L3
ab
cd
e f
DinvasionA3
Di
Dimax
=Dinvasioni
Dinvasionimax
DinvasionA3max
DRLS (cont.)Refinement
112/04/1956

Dmovei : the moving vector caused by the
farther anchor i Vi,j : the unit vector in the
direction from the farther anchor
i towards the initial estimative
location j Dmovei = Vi,j˙Di
estimative region
DmoveA3
DinvasionA3
DmoveA4
DinvasionA4
DmoveA5
DinvasionA5
A4
A5
A1
A2
NN’A3
DRLS (cont.)Refinement
112/04/1957
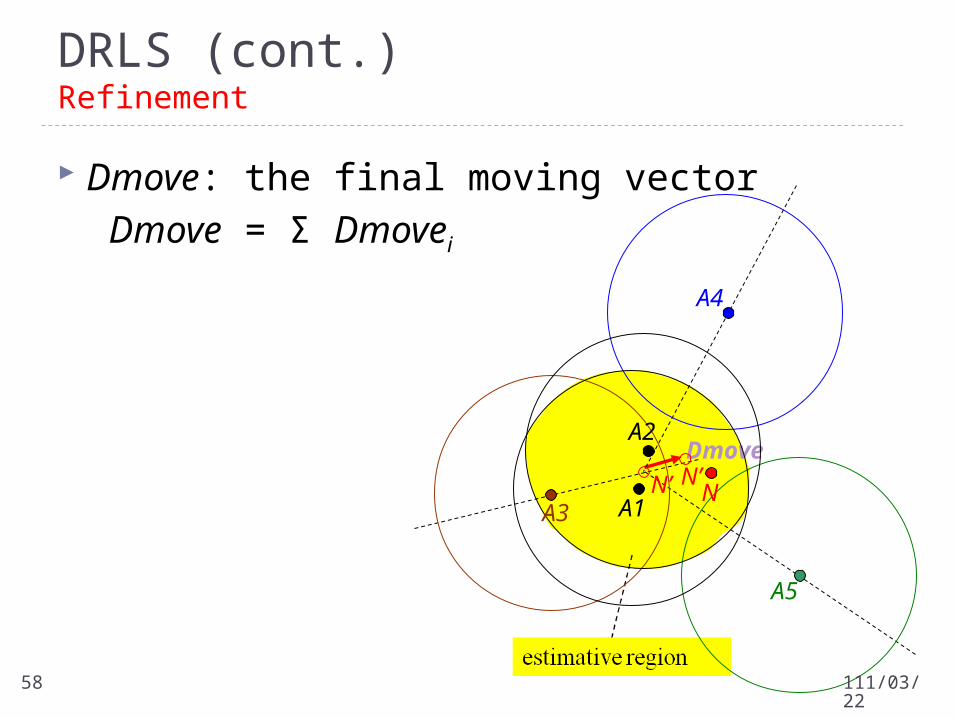
Dmove: the final moving vector
Dmove = Σ Dmovei
Dmove
A4
A5
A1
A2
NN’A3
N’
DRLS (cont.)Refinement
112/04/1958
Improvements Dynamic number of samples
According to the overlapping region of anchor constraints Restricted samples
Anchor constraints The estimative locations of neighboring normal nodes
Predicted moving direction of the normal node Be used to increase the localization accuracy
IMCL Improved MCL Localization Scheme
112/04/1959
Phase 1- Sample Selection Phase
Phase 2- Neighbor Constraints Exchange Phase
Phase 3- Refinement Phase
IMCL (cont.)
112/04/1960
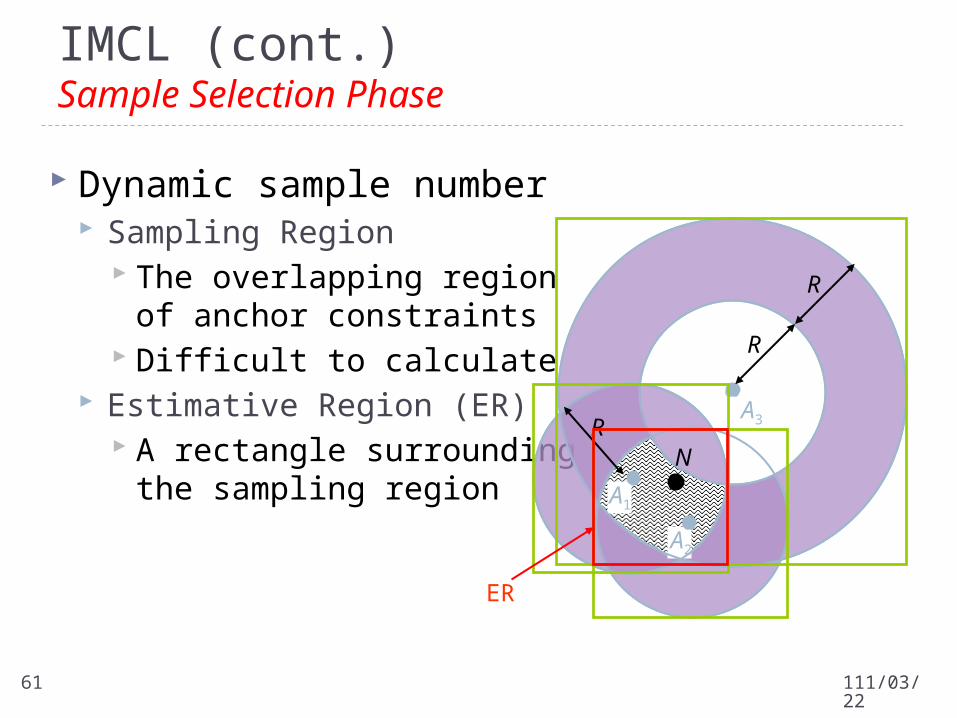
Dynamic sample number Sampling Region
The overlapping region of anchor constraints
Difficult to calculate Estimative Region (ER)
A rectangle surrounding the sampling region A1
A2
A3
R
R
R
ER
N
IMCL (cont.) Sample Selection Phase
112/04/1961
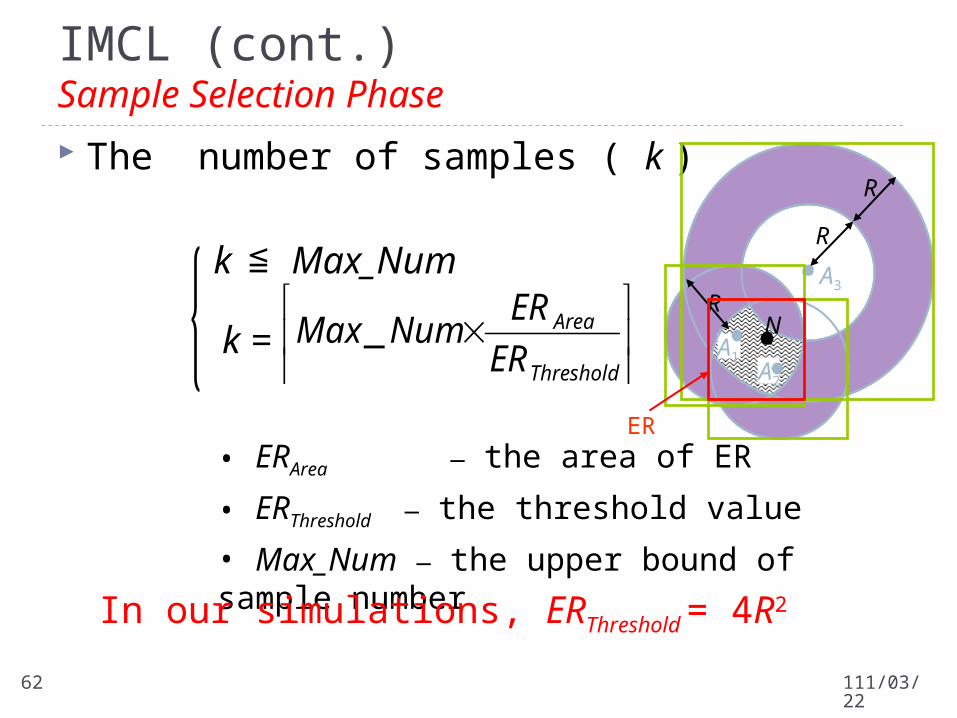
IMCL (cont.) Sample Selection Phase
The number of samples ( k )
k =
• ERArea — the area of ER
• ERThreshold — the threshold value
• Max_Num — the upper bound of sample number
In our simulations, ERThreshold = 4R2
Threshold
Area
ER
ERNumMax _
k ≦ Max_Num
A1A2
A3
R
R
R
ER
N
112/04/1962
IMCL (cont.) Sample Selection Phase
Using the prediction and filtering phase of MCL Samples are randomly selected from the region
extended Vmax from previous samples Filter new samples
Near anchor constraints Farther anchor constraints
112/04/1963
N2
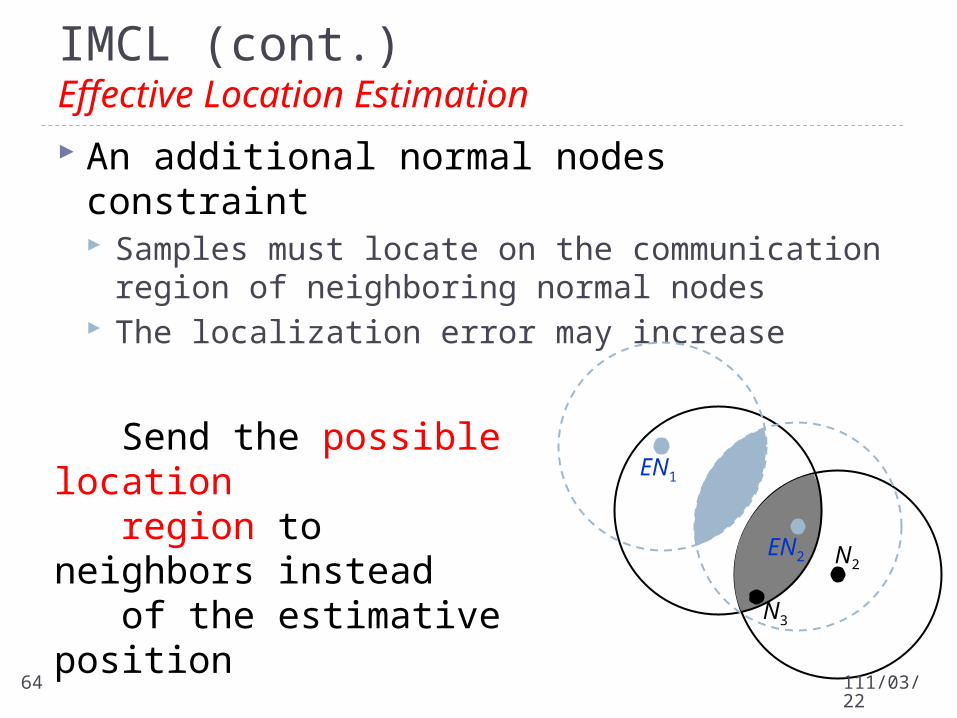
IMCL (cont.) Effective Location Estimation
An additional normal nodes constraint Samples must locate on the communication region of
neighboring normal nodes The localization error may increase
N1
N3
Send the possible location region to neighbors instead of the estimative position
EN1
EN2
112/04/1964
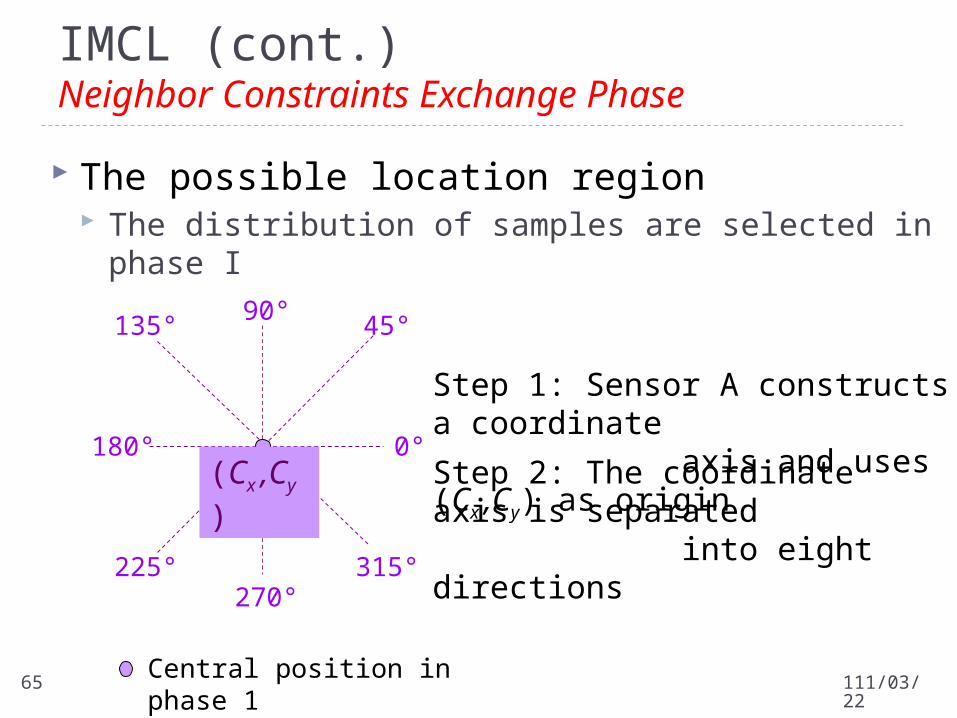
The possible location region The distribution of samples are selected in phase I
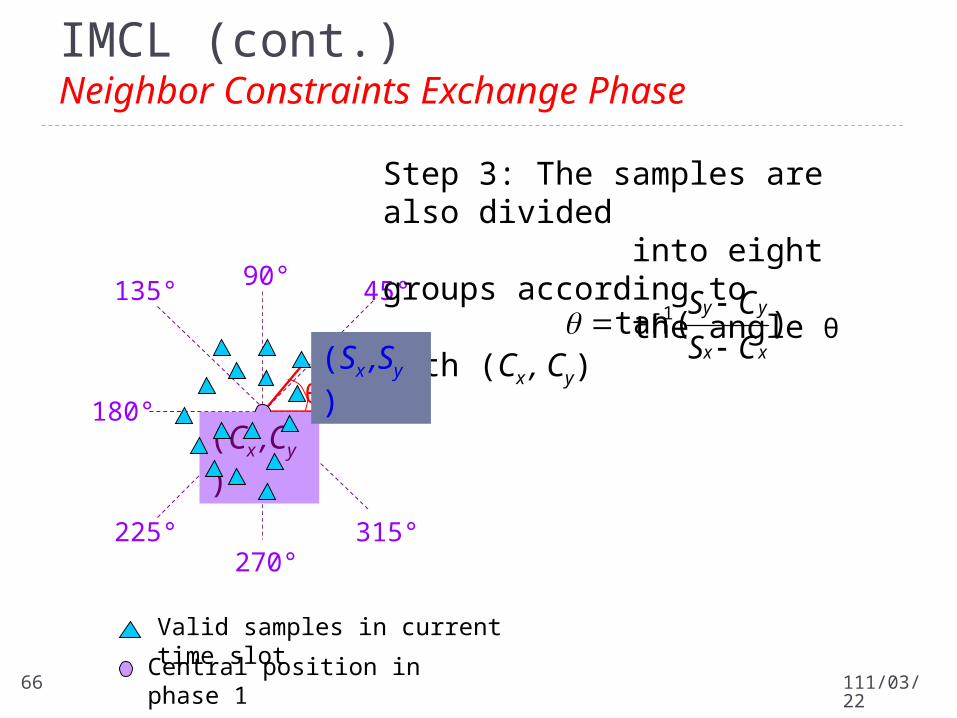
IMCL (cont.) Neighbor Constraints Exchange Phase
Step 1: Sensor A constructs a coordinate axis and uses (Cx ,Cy) as origin
Step 2: The coordinate axis is separated into eight directions
Central position in phase 1
45°135°
225° 315°
90°
270°
180° 0°(Cx ,Cy)
112/04/1965
θ
45°90°
135°
180° 0°
225°270°
315°
IMCL (cont.) Neighbor Constraints Exchange Phase
Step 3: The samples are also divided into eight groups according to the angle θ with (Cx , Cy)
(Cx ,Cy)
(Sx ,Sy))(tan 1
xx
yy
CS
CS
Valid samples in current time slot
Central position in phase 1112/04/1966
45°90°
135°
180° 0°
225°270°
315°
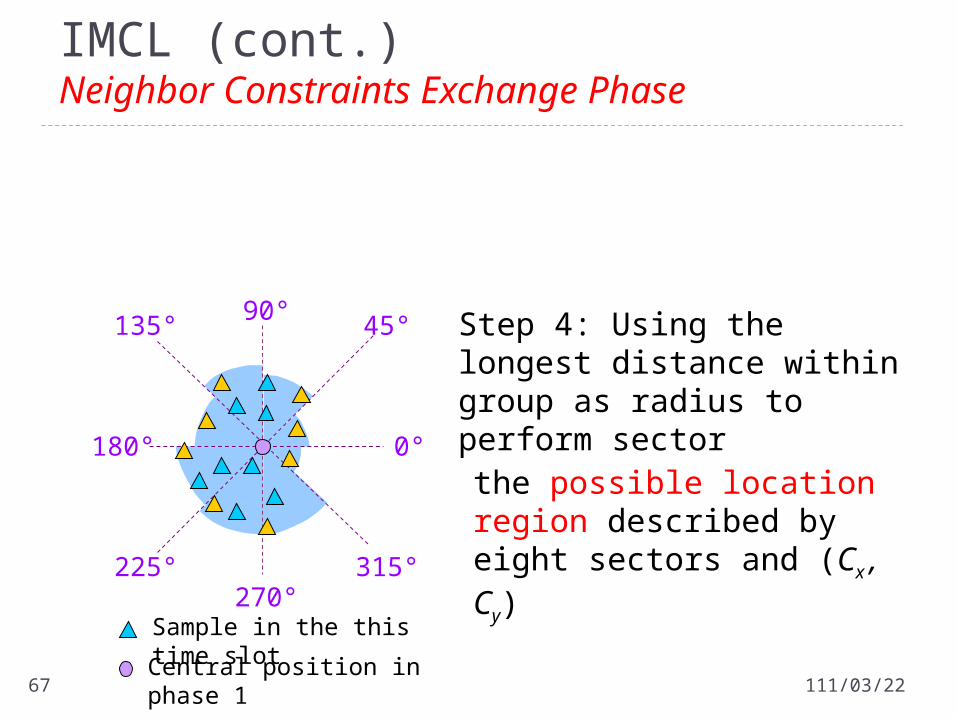
IMCL (cont.) Neighbor Constraints Exchange Phase
Step 4: Using the longest distance within group as radius to perform sector
the possible location region described by eight sectors and (Cx , Cy)
Sample in the this time slot
Central position in phase 1112/04/1967
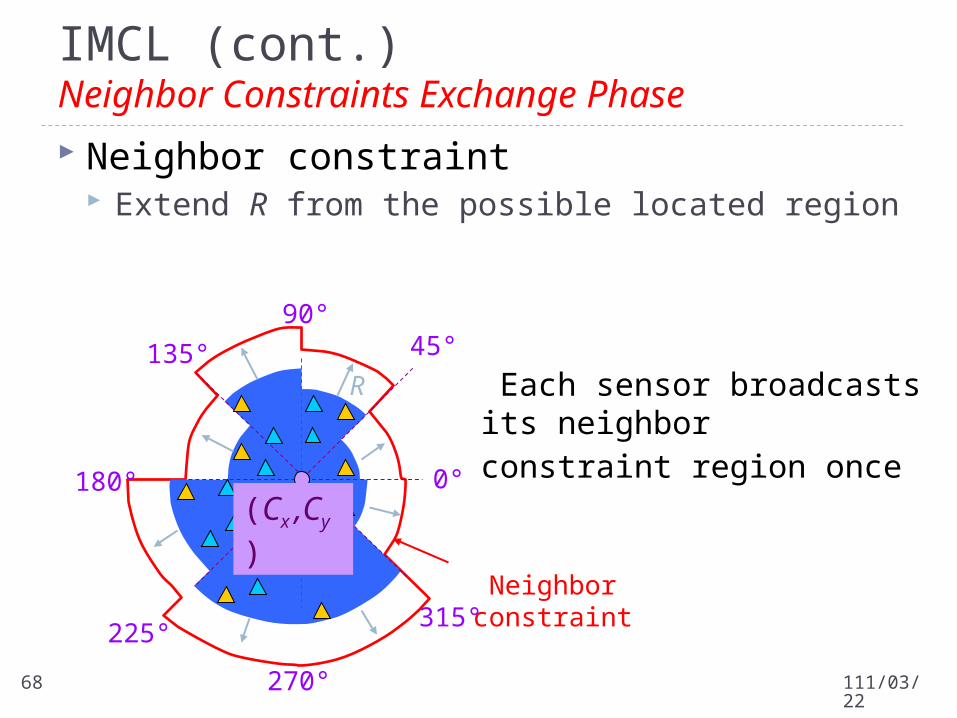
Neighbor constraint Extend R from the possible located region
Neighbor constraint
90°45°135°
180° 0°
225°
270°
315°
(Cx ,Cy)
R Each sensor broadcasts its neighbor constraint region once
IMCL (cont.) Neighbor Constraints Exchange Phase
112/04/1968
IMCL (cont.) Refinement Phase
Samples are filtered Neighbor constraints
Receive from neighboring normal nodes Moving constraint
Predict the possible moving direction When sample is not satisfy the constraints
Normal node generates a valid sample to replace it
112/04/1969
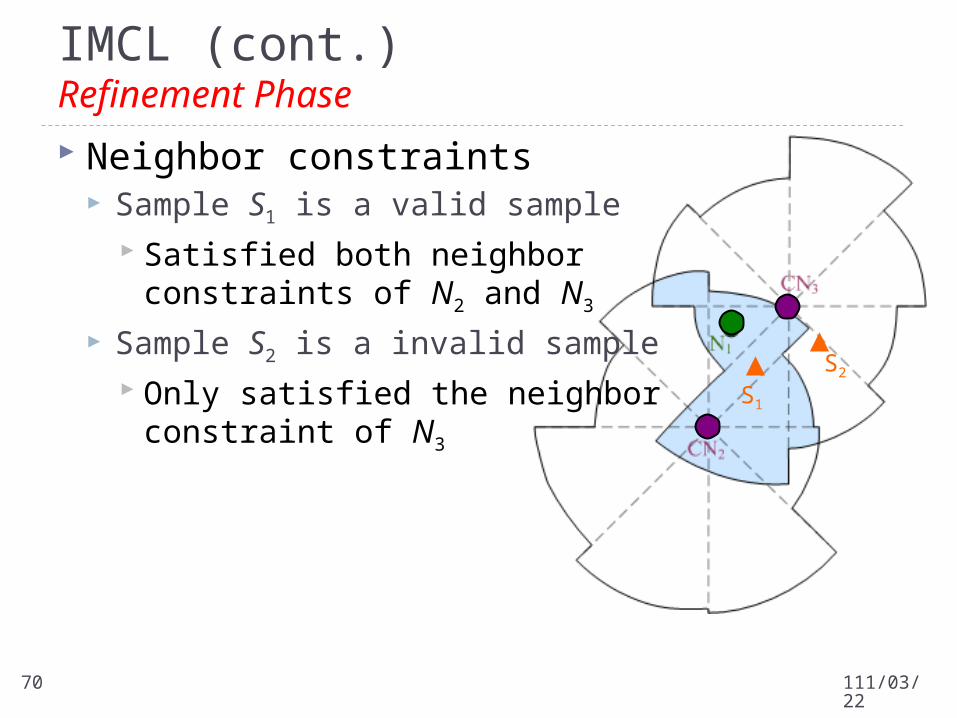
IMCL (cont.) Refinement Phase
S1
S2
Neighbor constraints Sample S1 is a valid sample
Satisfied both neighborconstraints of N2 and N3
Sample S2 is a invalid sample Only satisfied the neighbor
constraint of N3
112/04/1970
IMCL (cont.) Refinement Phase
Et-2
Et-1
θΔ Φ
Δ Φ(Cx , Cy)
(Cx , Cy)
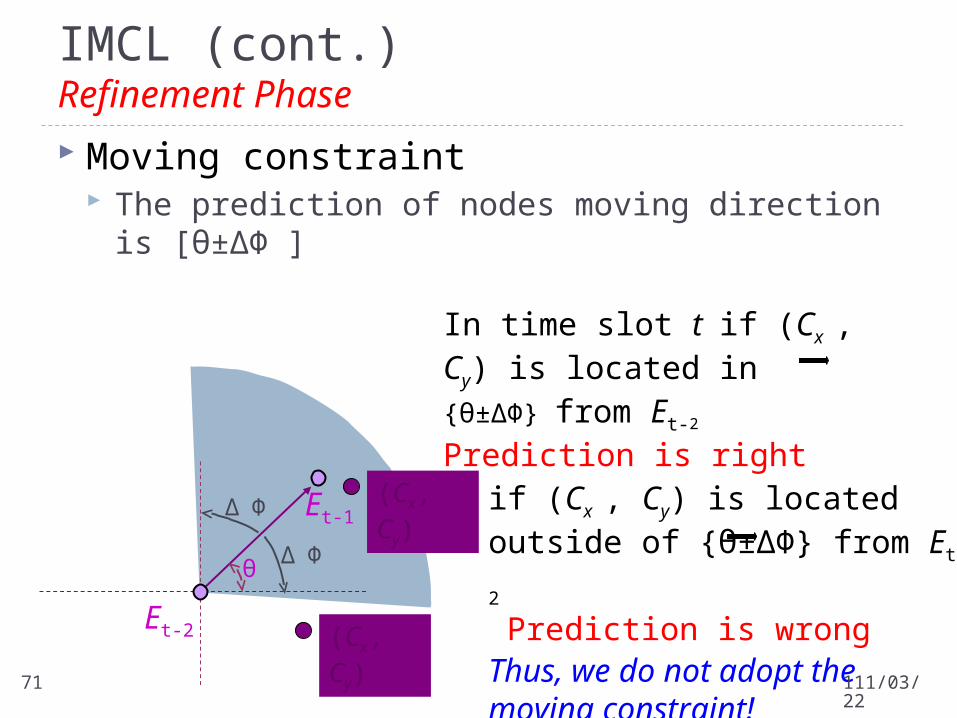
In time slot t if (Cx , Cy) is located in {θ±ΔΦ} from Et-2
Prediction is right
if (Cx , Cy) is located outside of {θ±ΔΦ} from Et-2
Prediction is wrongThus, we do not adopt the moving constraint!
Moving constraint The prediction of nodes moving direction is [θ±ΔΦ ]
112/04/1971
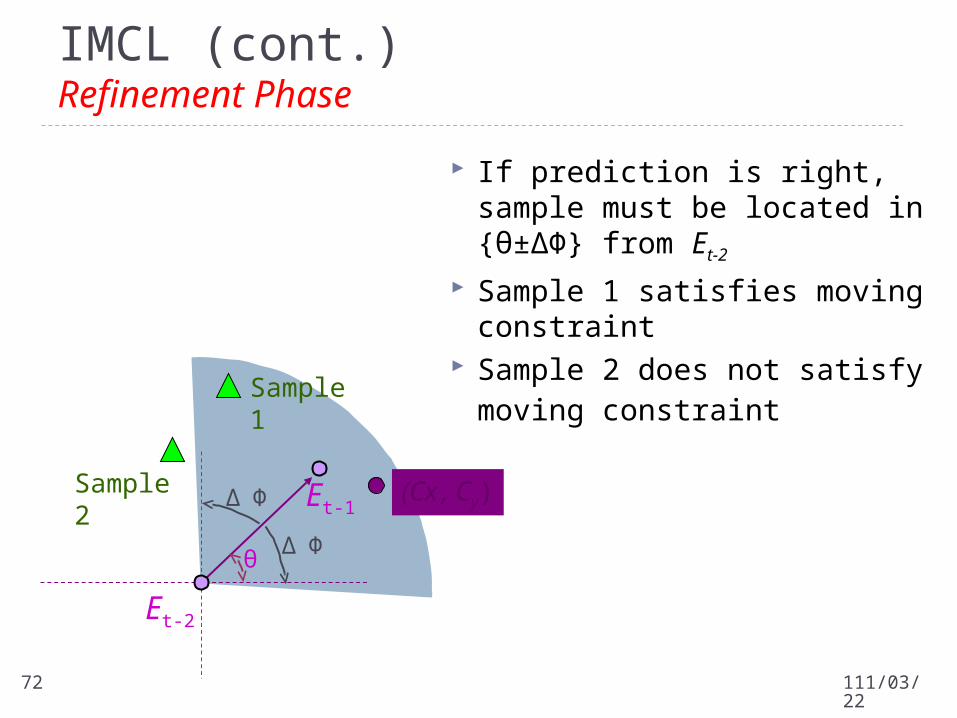
IMCL (cont.) Refinement Phase
If prediction is right, sample must be located in {θ±ΔΦ} from Et-2
Sample 1 satisfies moving constraint
Sample 2 does not satisfy moving constraint
Et-2
Et-1
θΔ Φ
Δ Φ (Cx , Cy)
Sample 1
Sample 2
112/04/1972
IMCL (cont.) Estimative Position
Normal node calculates the estimative position Et (Ex , Ey) of samples
Ex =
Ey =
k
ixk
i1
sample of coordinate
k
iyk
i1
sample of coordinate number sample , k
112/04/1973
Determining location or position is a really important function in WSN, but fraught with many errors and shortcomings
Range estimates often not sufficiently accurate Many anchors are needed for acceptable results Anchors might need external position sources (GPS)
Conclusions
112/04/1974
References J. Hightower and G. Borriello. “Location Systems for Ubiquitous Computing,”
IEEE Computer, 34(8): 57–66, 2001. J. Hightower and G. Borriello. “A Survey and Taxonomy of Location Systems for
Ubiquitous Computing,” Technical Report UW-CSE 01-08-03, University of Washington, Computer Science and Engineering, Seattle, WA, August 2001.
A. Boukerche, H. Oliveira, E. Nakamura, and A. Loureiro. “Localization systems for wireless sensor networks”. IEEE Wireless Communications, December 2007.
R. Want, A. Hopper, V. Fal˜ao, and J. Gibbons. The Active Badge Location System. ACM Transactions on Information Systems, 10(1): 91–102, 1992.
A. Ward, A. Jones, and A. Hopper. A New Location Technique for the Active Office. IEEE Personal Communications, 4(5): 42–47, 1997.
P. Bahl and V. N. Padmanabhan. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the IEEE INFOCOM, pages 775–784, Tel-Aviv, Israel, April 2000.
N. B. Priyantha, A. Chakraborty, and H. Balakrishnan. The Cricket Location-Support System. In Proceedings of the 6th International Conference on Mobile Computing and Networking (ACM Mobicom), Boston, MA, 2000.
112/04/1975
References
N. Bulusu, J. Heidemann, and D. Estrin. “GPS-Less Low Cost Outdoor Localization For Very Small Devices,” IEEE Personal Communications Magazine, 7(5): 28–34, 2000.
C. Savarese, J. Rabay, and K. Langendoen. “Robust Positioning Algorithms for Distributed Ad-Hoc Wireless Sensor Networks,” In Proceedings of the Annual USENIX Technical Conference, Monterey, CA, 2002.
A. Savvides, C.-C. Han, and M. Srivastava. “Dynamic Fine-Grained Localization in Ad-Hoc Networks of Sensors,” Proceedings of the 7th Annual International Conference on Mobile Computing and Networking, pages 166–179. ACM press, Rome, Italy, July 2001.
S. Simic and S. Sastry, “Distributed localization in wireless ad hoc networks,” UC Berkeley, Tech. rep. UCB/ERL M02/26, 2002. D. Niculescu and B. Nath. “Ad Hoc Positioning System (APS)”. In Proceedings of IEEE GlobeCom, San Antonio, AZ, November 2001.
C. Savarese, J. M. Rabaey, and J. Beutel. “Locationing in Distributed Ad-Hoc Wireless Sensor Networks”. In Proceedings of the International Conference on Acoustics, Speech and Signal Processing (ICASSP 2001), Salt Lake City, Utah, May 2001.
112/04/1976
References V. Ramadurai and M. L. Sichitiu. “Localization in Wireless Sensor Networks: A
Probabilistic Approach”. In Proceedings of 2003 International Conference on Wireless Networks (ICWN 2003), pages 300–305, Las Vegas, NV, June 2003.
M. L. Sichitiu and V. Ramadurai, “Localization of Wireless Sensor Networks with A Mobile Beacon,” Proc. 1st IEEE Int’l. Conf. Mobile Ad Hoc and Sensor Sys., FL, Oct. 2004, pp. 174–83.
N.Bodhi Priyantha, H. Balakrishnan, E. Demaine, S. Teller,”Mobile-Assisted Localization in Sensor Network”, IEEE INFOCOM 2005, Miami, FL, March 2005.
T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. Abdelzaher. Range-Free Localization Schemes for Large Scale Sensor Networks. Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, pages 81–95. ACM Press, 2003.
F. Dellaert, D. Fox, W. Burgard, and S. Thrun, "Monte Carlo Localization for Mobile Robots", IEEE International Conference on Robotics and Automation (ICRA), 1999
L. Hu and D. Evans, "Localization for Mobile Sensor Networks," Proc. ACM MobiCom, pp. 45-47, Sept. 2004.
112/04/1977
References J.-P. Sheu, P.-C. Chen, and C.-S. Hsu, “A Distributed Localization Scheme for
Wireless Sensor Networks with Improved Grid-Scan and Vector-Based Refinement,” IEEE Trans. on Mobile Computing, vol. 7, no. 9, pp. 1110-1123, Sept. 2008.
Jang-Ping Sheu, Wei-Kai Hu, and Jen-Chiao Lin, "Distributed Localization Scheme for Mobile Sensor Networks," IEEE Transactions on Mobile Computing Vol. 9, No. 4, pp. 516 - 526, April 2010.
112/04/1978