chapter part 2
TRANSCRIPT

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 1/12
Math 334 6.3. INVERSE LAPLACE TRANSFORMS 90
theorem we get
L[cos ax] =1
1 − e−2πs
a
2π
a
0
e−sx cos axdx =1
1 − e−2πs
a e−sx
s2
+ a2
(a sin ax − s cos ax)2π
a
0
=1
1 − e−2πs
a
e−2πs
a (−s) − (−s)
s2 + a2
=
s
s2 + a2.
Example 6.23. Finf L[f (x)] for the function
f (x) =
1 0 < x 1
−1 1 < x 2, f (x + 2n) = f (x) ∀n ∈ Z.
Solution The function f is periodic with period 2, so we have
L[f (x)] =1
1 − e−2s 20
e−sxf (x) dx =1
1 − e−2s 1
0e−sx dx −
21
e−sx dx
=1
1 − e−2s
e−2s − 2e−s + 1
s
=
(1 − e−s)2
s(1 − e−2s)=
1 − e−s
s(1 + e−s=
es/2 − e−s/2
s(es/2 + e−s/2)=
1
stanh(
1
s).
6.3 Inverse Laplace Transforms
Recall the solution procedure outlined in Figure 6.1. The final stage in that solution procedure involvescalulating inverse Laplace transforms. In this section we look at the problem of finding inverse Laplacetransforms. In other words, given F (s), how do we find f (x) so that F (s) = L[f (x)].
We begin with a simple example which illustrates a small problem on finding inverse Laplace transforms.
Example 6.24. Consider the functions
f (x) = x2, and g(x) =
x2 x = 2, 3
48 x = 2
−π x = 3
.
Then L[f (x)] = L[g(x)] =2
s3. Since an integral is not affected by the changing of its integrand at a few
isolated points, more than one function can have the same Laplace transform.
Example 6.24 illustrates that inverse Laplace transforms are not unique. However, it can be shown that, if several functions have the same Laplace transform, then at most one of them is continuous. This promptsus to make the following definition.
Definition 6.25. The inverse Laplace transform of F (s), denoted L−1[F (s)], is the function f definedon [0, ∞) which has the fewest number of discontinuities and satisfies
L[f (x)] = F (s). ◭

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 2/12
Math 334 6.3. INVERSE LAPLACE TRANSFORMS 91
Example 6.26.
1. L−1[2
s3] = x2.
2. L−1[ ss2 + 9
] = cos3x.
3. L−1[s − 1
s2 − 2s + 5] = L
−1[s − 1
(s − 1)2 + 4] = exL−1[
s
s2 + 4] = ex cos2x. (using property 1 of Theorem
6.17 in reverse)
The inverse Laplace transform is a linear operator.
Theorem 6.27.
If L−1[F (s)] and L−1[G(s)] exist, then L−1[αF (s) + βG(s)] = αL−1[F (s)] + β L−1[G(s)].
Proof Starting from the right hand side we have
L[αL−1[F (s)] + β L−1[G(s)]] = αL[L−1[F (s)]] + β L[L−1[G(s)]] = αF (s) + βG(s).
The result follows.
Most of the properties of the Laplace transform can be reversed for the inverse Laplace transform.
Theorem 6.28.
If L−1[F (s)] = f (x), then the following hold:
1.L−1
[F (s + a)] = e−ax
f (x);2. L−1[sF (s)] = f ′(x), if f (0) = 0;
3. L−1[1
sF (s)] =
x0
f (t) dt;
4. L−1[e−asF (s)] = ua(x) f (x − a).
Proof 1. L[e−axf (x)] = F (s + a) from Theorem 6.17, property 1. The result follows.
2. L[f ′(x))] = −f (0) + sF (s) from Theorem 6.17, property 4. The result follows.
3. L[
x0
f (t) dt] =1
sF (s), from Theorem 6.17, property 5. The result follows.
4. L[ua(x)f (x − a)] = e−asL[f (x)] = e−asF (s), from Theorem 6.19. The result follows.
Example 6.29. Find L−1[1
s(s2 + 1)].
Solution
We can write1
s(s2 + 1)=
1
sF (s), where F (s) =
1
s2 + 1. Then f (x) = L−1[F (s)] = sin x, so we get
L−1[
1
s(s2 + 1)] = L
−1[1
sF (s)] =
x0
f (t) dt =
x0
sin t dt = 1 − cos x.

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 3/12
Math 334 6.3. INVERSE LAPLACE TRANSFORMS 92
Example 6.30. Find L−1[
1
s(s2 + +2s + 5)].
Solution
L−1[
1s(s2 + 2s + 5)
] = L−1[
1(s + 1)2 + 4
] = e−xL−1[1
s2 + 4] =
12
e−x sin2x.
Example 6.31. Find L−1[
1 + e−s
s2].
Solution
L−1[
1 + e−s
s2] = L
−1[1
s2+
e−s
s2] = L
−1[1
s2] + L
−1[e−s
s2] = x + u1(x)(x − 1).
Example 6.32. Find L−1[4e−2s
s2 + 16].
Solution
L−1[
4e−2s
s2 + 16] = L
−1[e−2s ·4
s2 + 16] = u2(x)L−1[
4
s2 + 16] = u2(x)sin4x.
Many transforms that one encounters are of the form F (s) =P (s)
Q(s), where P and Q are polynomials in s
with deg{Q} > deg{P }. To evaluate L−1[F (s)], one writes
P (s)
Q(s)in terms of partial fractions.
Example 6.33 (distinct linear factors). Find L−1[
7s − 1
(s + 1)(s + 2)(s − 3)].
Solution We write the expression in the form
7s − 1
(s + 1)(s + 2)(s − 3)=
A
s + 1+
B
s + 2+
C
s − 3.
Solving for the constants yields: A = 2, B = −3, and C = 1. Thus, we get
L−1[
7s − 1
(s + 1)(s + 2)(s − 3)] = L
−1[2
s + 1] − L
−1[3
s + 2] + L
−1[1
s − 3] = 2e−x − 3e−2x + e3x.
Example 6.34 (repeated linear factors). Find L−1[s2 + 9s + 2
(s − 1)2
(s + 3)
].
Solution We write the expression in the form
s2 + 9s + 2
(s − 1)2(s + 3)=
A
s − 1+
B
(s − 1)2+
C
s + 3.
Solving for the constants yields: A = 2, B = 3, and C = −3. Thus, we get
L−1[
s2 + 9s + 2
(s − 1)2(s + 3)] = L
−1[2
s − 1] + 3L−1[
1
(s − 1)2] − L
−1[1
s + 3] = 2e−x + 3xex − e−3x.

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 4/12
Math 334 6.4. APPLICATIONS TO DIFFERENTIAL EQUATIONS 93
Example 6.35 (quadratic factors). Find L−1[
2s2 + 10s
s2 − 2s + 5(s + 1)].
Solution
We write the expression in the form
L−1[
2s2 + 10s
s2 − 2s + 5(s + 1)] =
A(s − 1) + B
(s − 1)2 + 4+
C
s + 1.
Solving for the constants yields: A = 3, B = 8, and C = −1. Thus, we get
L−1[
2s2 + 10s
s2 − 2s + 5(s + 1)] = 3L−1[
s − 1
(s − 1)2 + 4] + 4L−1[
2
(s − 1)2 + 4] − L
−1[1
s + 1]
= 3ex cos2x + 4ex sin2x − e−x.
6.4 Applications to Differential Equations
The easiest way to see how to apply Laplace transforms to differential equations is to work through someexamples.
Example 6.36. Solve the following initial value problem:
y′′ − y′ = 2x, y(0) = 1, y′(0) = −2.
Solution Method 1 (the old approach)First solve the homogeneous equation: y′′ − y = 0.
y = erx =⇒ r2 − r = 0 =⇒ r = 0, 1 =⇒ yh(x) = c1 + c2ex.
Now look for a particular solution: y p(x) = x(Ax + B) = Ax2 + Bx. Plug into the DE to get
y′′ p − y′ p = 0 =⇒
2A − B = 0
−2A = 2=⇒
A = −1
B = −2=⇒ y p(x) = −x2 − 2x.
Thus, we havey(x) = c1 + c2ex − x2 − 2x, y′(x) = c2ex − 2x − 2.
Apply the initial conditions:
y(0) = 1y′(0) = −2 =⇒
c1 + c2 = 1
c2 − 2 = −2=⇒
c1 = 1
c2 = 0=⇒ y(x) = 1 − x2 − 2x .
Method 2 (using Laplace transforms)Take Laplace transforms of the DE:
L[y′′] − L[y′] = 2L[x] =⇒
s2Y (s) − sy(0) − y′(0)
− [sY (s) − y(0)] =2
s2
=⇒ s2Y (s) − s + 2 − sY (s) + 1 =2
s2
=⇒ Y (s) =s3 − 3s2 + 2
s3(s − 1)=
(s − 1)(s2 − 2s − 2)
s3(s − 1)=
1
s−
2
s2−
2
s3

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 5/12
Math 334 6.4. APPLICATIONS TO DIFFERENTIAL EQUATIONS 94
Finally, taking the inverse Laplace transform, we arrive at the final solution:
y(x) = L−1[Y (s)] = 1 − 2x − x2.
Example 6.37. Solve the following initial value problem:
y′′ − 2y′ + 5y = −8e−x, y(0) = 2, y′(0) = 12.
Solution Take Laplace transforms of the DE:
L[y′′] − 2L[y′] + 5L[y] = −8L[e−x] =⇒
s2Y (s) − sy(0) − y′(0)
− 2 [sY (s) − y(0)] + 5Y (s) =2
s2
=⇒ s2Y (s) − 2s − 12 − 2sY (s) + 4 + 5Y (s) =−8
s + 1
=⇒ Y (s) =
2s2 + 10s
(s2 − 2s + 5)(s + 1)
=⇒ Y (s) = 3(s − 1)
(s − 1)2 + 4− 4
2
(s − 1)2 + 4−
1
s + 1.
Finally, taking the inverse Laplace transform, we arrive at the final solution:
y(x) = 3ex cos2x + 4ex sin2x − e−x.
Example 6.38. Solve the following initial value problem:
y′′ − 2y′ + 5y = −8e7−x, y(7) = 2, y′(7) = 12.
Solution It appears that we can not use Laplace transforms since L[y′] = sY (s) − y(0), and we don’t know y(0).But we can get around this by moving the initial point (in this case x0 = 7) to the origin by means of atranslation.
Let t = x − 7 and w(t) = y(x). Then we get
w′(t) = y′(x), w′′(t) = y′′(x), w(0) = y(7), w′(0) = y′(7),
so, the initial value problem becomes
w′′ − 2w′ + 5w = −8e−t, w(0) = 2, w′(0) = 12.
This is just the initial value problem we had in Example 6.40. The solution is
w(t) = 3et cos2t + 4et sin2t − e−t.
The solution to the original problem is
y(x) = w(x − 7) = 3ex−7 cos[2(x − 7)] + 4ex−7 sin[2(x − 7)] − e−(x−7).
Next we consider an initial value problem with discontinuous forcing.

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 6/12
Math 334 6.4. APPLICATIONS TO DIFFERENTIAL EQUATIONS 95
Example 6.39. Solve the following initial value problem:
y′′
+ 4y = g(x), y(0) = 0, y′
(0) = 0, where g(x) =
1 0 < x < 1
−1 1 < x < 20 x > 2
.
Solution We can re-write g as follows: g(x) = 1[u0(x) − u1(x)] − 1[u1(x) − u2(x)] = u0(x) − 2u1(x) + u2(x). Thenwe have
G(s) = L[g(x)] = L[u0(x)] − 2L[u1(x)] + L[u2(x)] =1
s− 2
e−s
s+
e−2s
s.
Take Laplace transforms of the DE:
L[y′′] + 4L[y] = L[g(x)] =⇒
s2Y (s) − sy(0) − y′(0)
+ 4Y (s) = G(s)
=⇒ s2Y (s) + 4Y (s) = G(s)
=⇒ Y (s) = G(s)s2 + 4
= 1s(s2 + 4)
− 2 e−s
s(s2 + 4)+ e
−2s
s(s2 + 4)
=⇒ Y (s) = F (s) − 2e−sF (s) + e−2sF (s),
where
F (s) =1
s(s2 + 4)=
1
4
1
s−
s
s2 + 4
.
Thus,
f (x) = L−1[F (s)] =
1
4(1 − cos2x).
Finally, taking the inverse Laplace transform, we arrive at the final solution:
y(x) = L−1[Y (s)] = L
−1[F (s)] − 2L−1[e−sF (s)] + L−1[e−2sF (s)]
= f (x) − 2u1(x)f (x − 1) + u2(x)f (x − 2)
=1
4{1 − cos2x − 2u1(x)(1 − cos[2(x − 1)]) + u2(x)(1 − cos[2(x − 2)])} .
Now we consider an ODE with variable coefficients.
Example 6.40. Solve the following initial value problem:
y′′ + 2xy′ − 4y = 1, y(0) = 0, y′(0) = 0.
Solution
Take Laplace transforms of the DE:
L[y′′] + 2L[xy′] − 4L[y] = L[1] =⇒
s2Y (s) − sy(0) − y′(0)
− 2d
ds[sY (s) − y(0)] − 4Y (s) =
1
s
=⇒ s2Y (s) − 2[sY ′(s) + Y (s)] − 4Y (s) =1
s
=⇒ Y ′(s) +
3
s−
s
2
Y (s) =
−1
2s2.

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 7/12
Math 334 6.5. CONVOLUTION 96
This is a linear ODE in Y (s). Look for an integrating factor µ:
µ′
µ
=3
s
−s
2
=⇒ ln µ = 3ln s −s2
4
=⇒ µ = s3e−s2/4.
The ODE for Y becomes:
d
ds[µY (s)] = µ
Y ′(s) +
µ′
µY (s)
= −
µ
2s2= −
s
2e−s
2/4.
Integrating yields:
µY (s) = −
s
2e−s
2/4 ds = e−s2/4 + C =⇒ Y (s) =
1
s3+
C
s3es
2/4.
It remains to determin the value of the constant if integration C . There is no auxiliary condition inheritedfrom the original ODE. To get an appropriate condition to enable us to determine C , we utilize Theorem6.12 that states that Y (s) → 0 as s → ∞. Therfore
lims→∞
Y (s) = 0 =⇒ C = 0 =⇒ Y (s) =1
s3.
Finally, taking the inverse Laplace transform, we arrive at the final solution:
y(x) = L−1[
1
s3] =
x2
2.
We can summarize the application of Laplace transforms to differential equations as follows.
1. For an ODE with constant coefficients, the equation for the Laplace transform is of the form AY = B.
2. For an ODE with polynomial coefficients in x, the equation for the Laplace transform is an ODE withpolynomial coefficients in s.
3. If the coefficient functions of the ODE are liear in x, the ODE for Y is a first order ODE.
4. The auxiliary condition to use when solving a first order ODE in Y is lims→∞
Y (s) = 0.
6.5 Convolution
Consider the following initial value problem:
y′′ + y = g(x), y(0) = y′(0) = 0.
Take the Laplace transform of the equation to get:
s2Y (s) − sy(0) − y′(0) + Y (s) = G(s) =⇒ Y (s) =G(s)
s2 + 1= F (s)G(s), where F (s) =
1
s2 + 1.
We would like to express the solution y(x) in terms of f (x) and g(x), i.e. we would like to express L−1[F (s)G(s)]in terms of L−1[F (s)] and L−1[G(s)]. To do this, we define a special type of product of functions. Letf, g ∈ P C (0, ∞).

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 8/12
Math 334 6.5. CONVOLUTION 97
Definition 6.41. The convolution of f and g, denoted f ∗ g, is defined as:
(f ∗ g)(x) := x
0
f (x − t)g(t) dt.
Example 6.42.
(1) 1 ∗ x =
x0
1 · t dt =x2
2.
(2) x ∗ x2 =
x0
(x − t) · t2 dt =x4
12.
Theorem 6.43.
The convolution product satisfies the following properties:1. f ∗ g = g ∗ f ; (convolution product is commutative)2. f ∗ (g + h) = f ∗ g + f ∗ h; (convolution product is distributive over addition)
3. f ∗ (g ∗ h) = (f ∗ g) ∗ h; (convolution product is associative)4. f ∗ 0 = 0.
Proof Exercise.
Remark. While the convolution product has many of the properties of ordinary multiplication of functions,it different in that it has no multiplicative identity element, i.e. there is no function g with the property thatg ∗ f = f for all funtions f . ◭
Theorem 6.44.
If (i) f, g ∈ P C (0, ∞);
(ii) F (s) = L[f (x)] and G(s) = L[g(x)], then
L[f ∗ g] = F (s)G(s), or equivalently L−1[F (s)G(s)] = (f ∗ g)(x).
Proof
L[f ∗ g] =
∞
0
e−sx(f ∗ g)(x) dx =
∞
0
e−sx
x0
f (x − t)g(t) dtdx
=
∞
0
∞
t
e−sxf (x − t)g(t) dxdt =
∞
0
∞
0
e−s(ξ+t)f (ξ )g(t) dξdt
= ∞
0
e−sξf (ξ ) dξ ∞
0
e−stg(t) dt = F (s)G(s).
Example 6.45. Find L−1[
1
s(s2 + 4)].
Solution Method 1 (the old approach)
L−1[
1
s(s2 + 4)] = L
−1[1
4
1
s−
s
s2 + 4
] =
1
4(1 − cos2x).
Method 2 (using convolution)

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 9/12
Math 334 6.6. THE DELTA FUNCTION 98
L−1[
1
s(s2 + 4)] =
1
2L−1[
1
s] ∗ L−1[
2
s2 + 4] =
1
2 x
0
L−1[
1
s](x − t)L−1[
2
s2 + 4](t) dt
=1
2
x
0
1 · sin2t dt = −1
4cos2t
x0
=1
4(1 − cos2x).
Now, returning to the origin problem:
y′′ + y = g(x), y(0) = y′(0) = 0.
The solution satisfies:
y(x) = L−1[
G(s)
s2 + 1] = g ∗ sin x =
x0
g(t) sin(x − t) dt.
Example 6.46. Solve the following integro-differential equation:
y′(x) = 1 − e−2x
x
0
y(t)e2t dt, y(0) = 1.
Solution The equation may be written as
y′ = 1 −
x0
j(t)e−2(x−t) dt = 1 − y ∗ e−2x.
Taking Laplace transforms we get
sY (s) − y(0) =1
s−
Y (s)
s + 2=⇒ Y (s) =
s + 2
s(s + 1)=
2
s−
1
s + 1=⇒ y(x) = 2 − e−x.
6.6 The Delta Function
Mechanical systems are often acted upon by external forces that are large in magnitude but are of shortduration. Some typical example are: a hammer hitting a nail; a bat hitting a baseball. These forces are of the form
F (t) =
0 t < t0
(· · · ) t0 t t1
0 t > t1
.
y
t
y=F(t)
t t 0 1
Figure 6.4: A plot of a localized force y = F (t).
7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 10/12
Math 334 6.6. THE DELTA FUNCTION 99
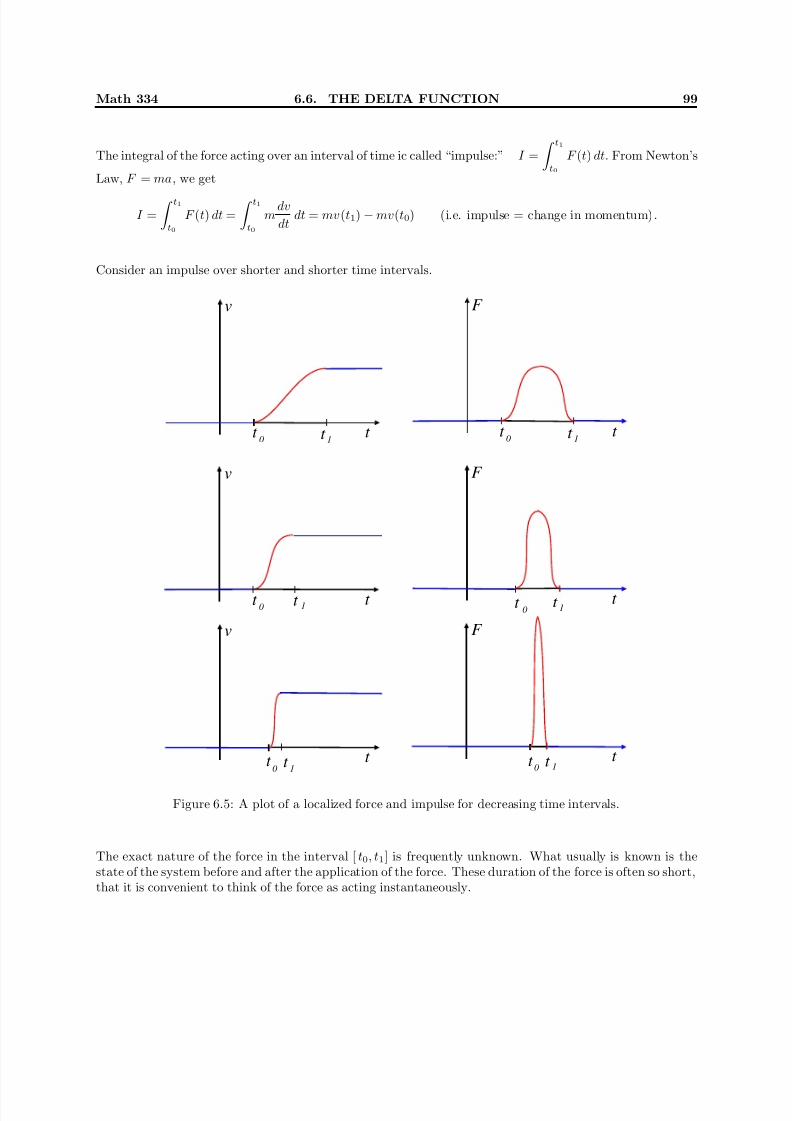
The integral of the force acting over an interval of time ic called “impulse:” I =
t1t0
F (t) dt. From Newton’s
Law, F = ma, we get
I =
t1t0
F (t) dt =
t1t0
mdv
dtdt = mv(t1) − mv(t0) (i.e. impulse = change in momentum).
Consider an impulse over shorter and shorter time intervals.
v
t t t 0 1
t t t 0 1
F
v
t t t 0 1
t t t 0 1
F
v
t t 0
t 1
F
t t 0
t 1
Figure 6.5: A plot of a localized force and impulse for decreasing time intervals.
The exact nature of the force in the interval [t0, t1] is frequently unknown. What usually is known is thestate of the system before and after the application of the force. These duration of the force is often so short,that it is convenient to think of the force as acting instantaneously.

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 11/12
Math 334 6.6. THE DELTA FUNCTION 100
v
t t t 0 1
t t t 0 1
F
Figure 6.6: A plot of a localized force and impulse with simplified approximation.
We define the following functions:
δ h(t) =
1
2h|t| h
0 |t| > hfor h 0.
t -h h
Figure 6.7: A plot of a δ h(t).
Thes functions have the following property: ∞
−∞
δ h(t) dt =
h−h
1
2hdt =
1
2h(h − (−h)) = 1.
Definition 6.47. The Dirac Delta Function is defined implicitly by the following properties:1. δ (t) = 0 for t = 0;
2.
∞
−∞
δ (t) = 1. ◭
Remark. The Dirac delta function is not a function in the usual sense. However, one can “think” of it asfollows:
δ (t) = limh→0
δ h(t) =
∞ t = 0
0 t = 0. ◭

7/27/2019 Chapter Part 2
http://slidepdf.com/reader/full/chapter-part-2 12/12
Math 334 6.6. THE DELTA FUNCTION 101
Theorem 6.48.
If f is continuous on (−∞, ∞), then for any c ∈ R,
∞−∞
f (t) δ (t − c) dt = f (c).
Proof We have
δ h(t − c) =
1
2h|t − c| h
0 |t − c| > h=
1
2hc − h t c + h
0 |t − c| > h.
Therefore ∞
−∞
f (t)δ (t − c) dt = limh→0
∞
−∞
f (t)δ h(t − c) dt = limh→0
1
2h
c+h
c−h
f (t) dt
= limh→0
1
2hf (c̄)(2h) for some c − h < c̄ < c + h (using the mean value theorem)
= limh→0
f (c̄) = f (c).
This is sometimes called the “sifting property” of the delta function since, from all possible values of f , it“sifts out” the value f (c).
Does the Dirac delta function have a Laplace transform? Yes it does, since
L[δ (t − c)] =
∞
0
e−stδ (t − c) dt = e−sc.
Remark. Notice that for c = 0 we get L[δ (t)] = 1. This reinforces what was said earlier, namely that δ (t)is not a function in the usual sense, since, for a normal function we have
lims→∞
F (s) = 0, but for the delta function we have lims→∞
L[δ (t)] = 0. ◭
Example 6.49. Solve the following initial value problem:
y′′ + y = 4δ (t − 2π), y(0) = y′(0) = 0.
Solution Taking Laplace transforms we get,
s2Y (s) − sy(0) − y′(0) + Y (s) = 4e−2πs =⇒ Y (s) = 4e−2πs
s2 + 1.
Taking inverse Laplace transforms we get
y(t) = u2π(t) sin(t − 2π) = u2π(t)sin t =
0 0 t < 2π
sin t t 2π.