chemical sensing based abc swarm intelligence algorithm for cancer treating nanorobots
TRANSCRIPT
CHEMICAL SENSING BASED ABC SWARM INTELLIGENCE
ALGORITHMFOR
CANCER TREATING NANOROBOTS
PRESENTED BY:Vidushi Sharma & Sakshi Srivastava ,B.Tech(Biotechnology), 3rd year,Banasthali University,Tonk, Rajasthan.
CON
TEN
TS1) INTRODUCTION * Nanorobots * Swarm Intelligence2) BACKGROUND AND MOTIVATION * Ant Colony Optimization * Particle Swarm Optimization * Artificial Bee Colony Optimization3) PHEROMONE BASED ABC
ALGORITHM4) ARCHITECHTURE OD
NANOROBOTS5) FUNCTION SPECIFIC MODELS * Look-out Nanorobots * Worker Nanorobots6) FUTURE7) CONCLUSION
INTRODUCTIONNanorobots are programmable engineering devices that are employed to manipulate and convey information at nano or microscopic scale with precision. Nanorobots move in human vascular system maneuvering specific medical task such as identifying and destroying cancer cells and so on.
Applications of nanorobots in the human body cannot be performed by a single nanorobot. Therefore, a swarm of a large number of nanorobots is employed for fulfilling a specific task. For effective functioning, a well-developed efficient Swarm Intelligence System needs to be developed.
NEED FOR SWARM:Co-ordinationCommunicationTask AllocationReducing Design complexities Adaptation Managing Traffic in blood vessels Avoid loss of any Nanorobot in-vivo Complete exploration Target Identification
FUCTIONS AND FEATURES OF SWARM INTELLIGENCE SYSTEMS:a. Stigmergyb. Decentralizationc. Self-organizationd. Bifurcationse. Positive and negative feedbacks
BACKGROUND AND MOTIVATIONConcept of nanomedicine emerged in 1950’s when Richard Feynman suggested the use of nanorobots as in vivo surgeons. However, Due to scale problems, nanorobots with complex capabilities are not possible rather simple ones. Hence, Swarm intelligence need to be employed in order to obtain complex collective behaviors constructed with simple individual behaviors .
In QUORUM SENSING, a nanorobot makes use of chemical molecules to send signals and sense similar signals through sensors. They have target specific receptors at surface which sense and analyze the concentration of chemical signals emitted from the target site . Example: E-cadherin in case of cancer cells. Three sensing and motion techniques have been suggested
Multidirectional sensing and motion
Mimic Bacterial sensing and motion
Random Motion
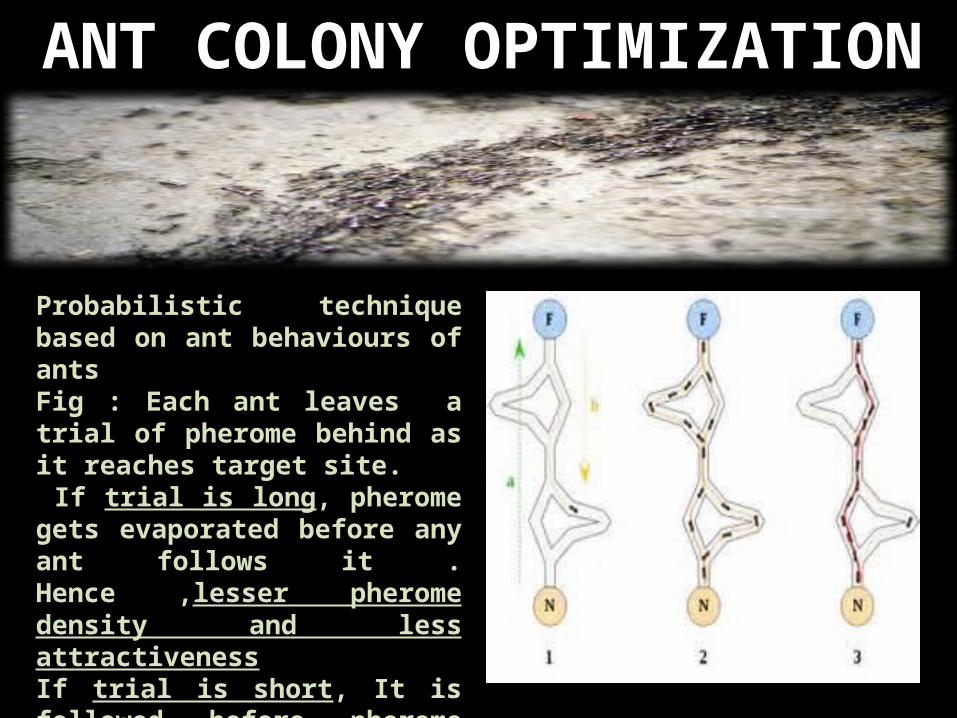
ANT COLONY OPTIMIZATION
Probabilistic technique based on ant behaviours of antsFig : Each ant leaves a trial of pherome behind as it reaches target site. If trial is long, pherome gets evaporated before any ant follows it . Hence ,lesser pherome density and less attractivenessIf trial is short, It is followed before pherome gets evaporated and hence it has stronger pherome density due to larger run time.
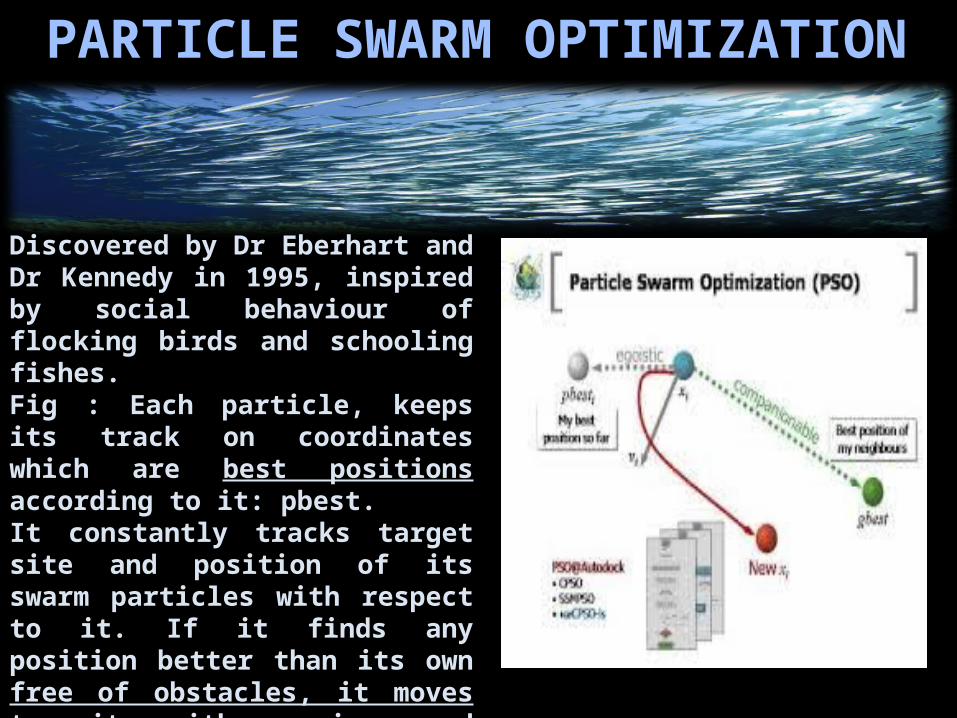
PARTICLE SWARM OPTIMIZATION
Discovered by Dr Eberhart and Dr Kennedy in 1995, inspired by social behaviour of flocking birds and schooling fishes.Fig : Each particle, keeps its track on coordinates which are best positions according to it: pbest.It constantly tracks target site and position of its swarm particles with respect to it. If it finds any position better than its own free of obstacles, it moves to it with increased velocity. Global best position is analysed with respect to entire swarm towards target site.
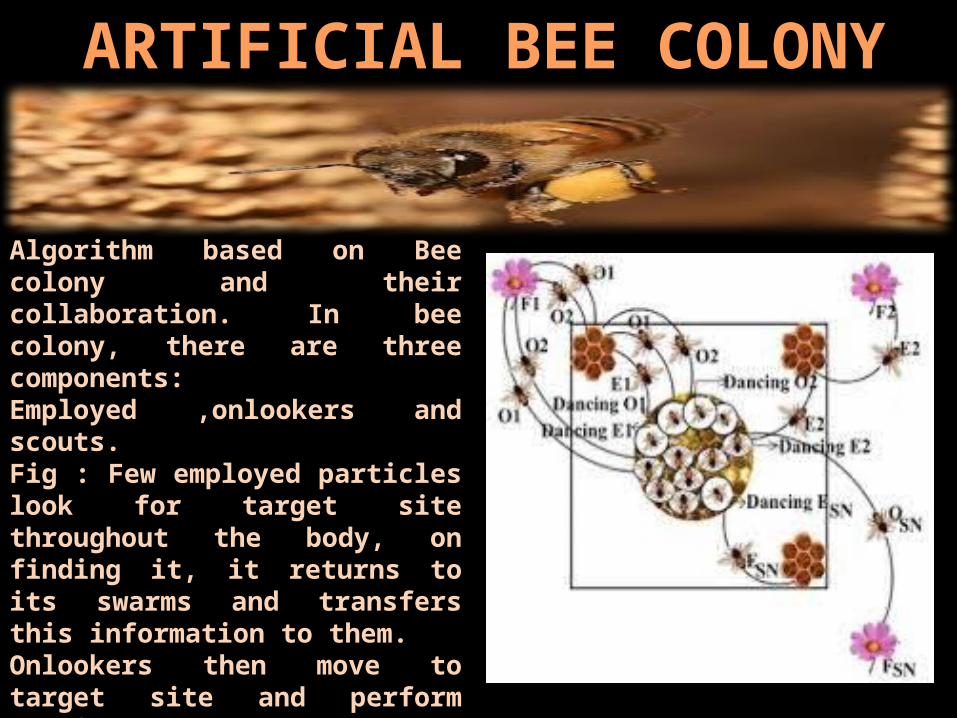
ARTIFICIAL BEE COLONY
Algorithm based on Bee colony and their collaboration. In bee colony, there are three components: Employed ,onlookers and scouts.Fig : Few employed particles look for target site throughout the body, on finding it, it returns to its swarms and transfers this information to them.Onlookers then move to target site and perform fuction. When they are reported another site they move to it.Scouts are particles, whose sites are left by onlookers and they search for another site.
CHEMICAL SENSING BASED ABC SWARM INTELLIGENCE
ALGORITHM Initially, two methods were used to reach the target sites: a. Random Motion- Nanorobot moves passively along with blood and reaches the target site following the Brownian Motion in blood plasma. b. Follow Gradient- Nanorobot senses and monitors concentrations of E-Cadherin molecules in blood. On recognising it, a nanorobot moves towards the higher concentrations of E-Cadherin until it reaches the target site. The above methods have certain issues like: the nanorobots may get lost, they may not be able to explore the problem space thoroughly, they may block any artery or they may collide among themselves.
We have combined the basics of ABC and ACO algorithms to reach a more possible solution.
ARCHITECHTURE OF NANOROBOTS
Architecture of nanorobots has been suggested keeping certain points into considerations:
Non replicating devices Small size- for effective movement in vascular system Biocompatible: Physically, Chemically, Thrombogenically, Biologically Brownian motion and viscous forces are very significant in blood plasma Might need to move against blood flow Movement should not cause any harm to body Prevent collision among themselves and fragmentation Movement close to vessel walls Viscous forces are significant in blood plasma Avoid external pressure Viscosity of blood must not get affected due to presence of nanorobots in blood
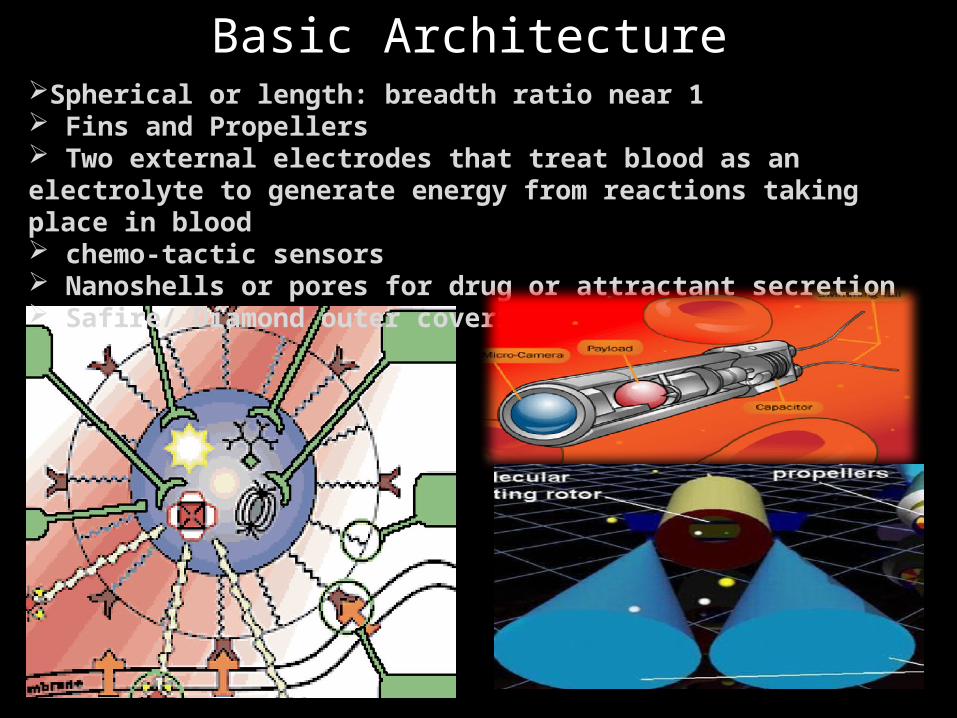
Spherical or length: breadth ratio near 1 Fins and Propellers Two external electrodes that treat blood as an electrolyte to generate energy from reactions taking place in blood chemo-tactic sensors Nanoshells or pores for drug or attractant secretion Safire/ Diamond outer covering
Basic Architecture
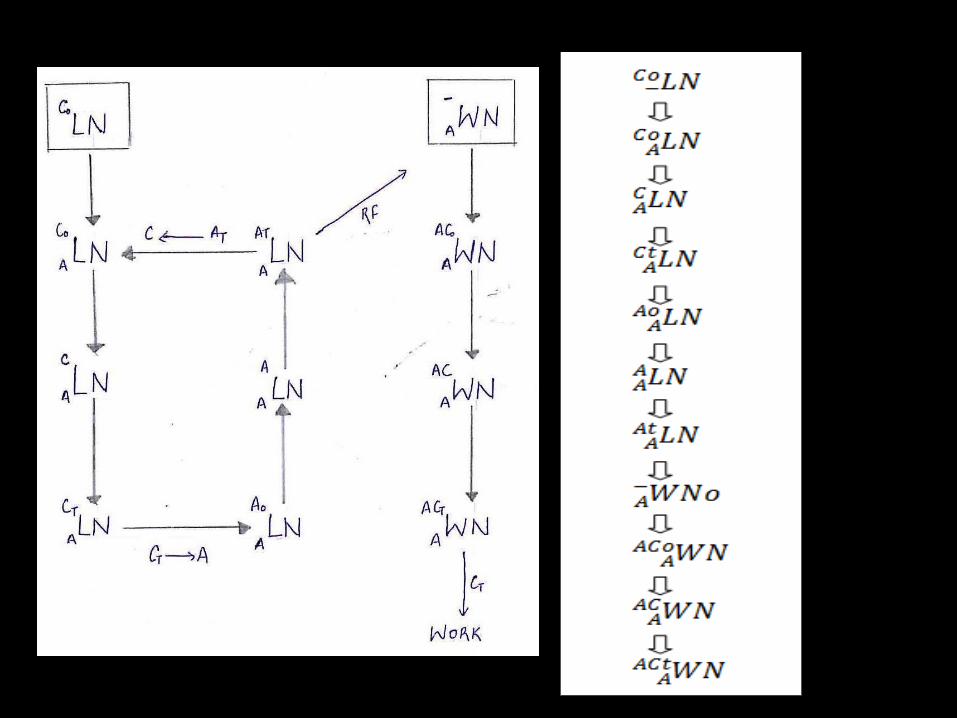
FUNCTION SPECIFIC MODELSLOOK-OUT NANOROBOT:
Two switching E-cadherin and Attractant specific chemo-tactic sensors that are arranged in a GATE circuit such that either of them is functionally active at a time. RF tellementary antenna on its surface A control unit that is responsible for sending out RF signals at any time This switching of sensors is responsible for exploration, target identification, laying of trail by LNs and conveying information to the WNs without intervention of any one function due to another. It ensures that at any time LN is either searching for a target site or its fellow WNs without getting completely lost during the exploration.
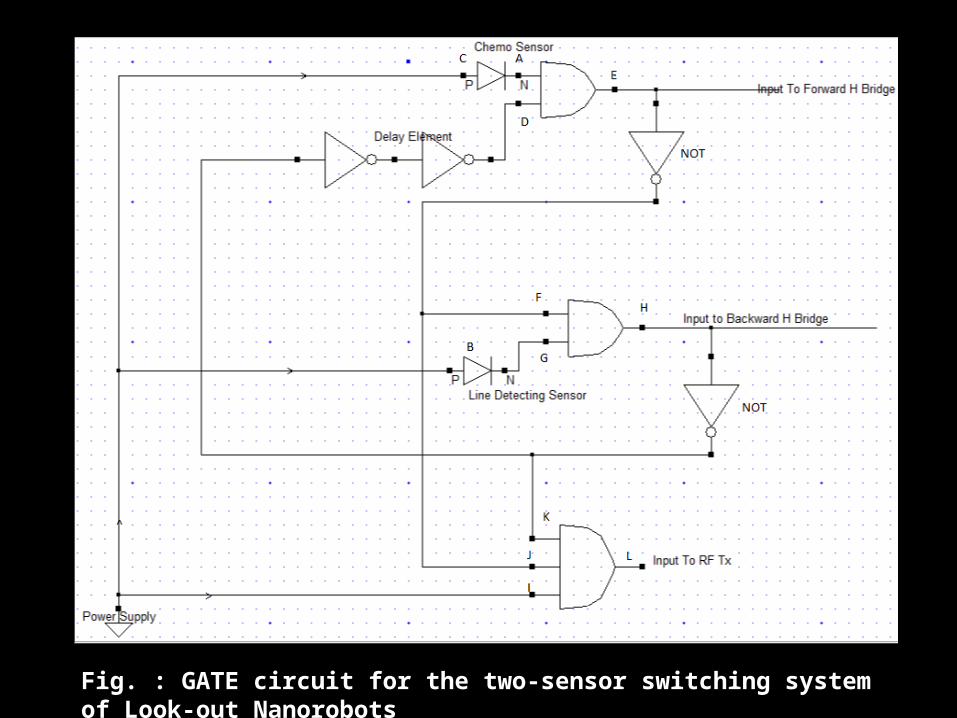
Fig. : GATE circuit for the two-sensor switching system of Look-out Nanorobots
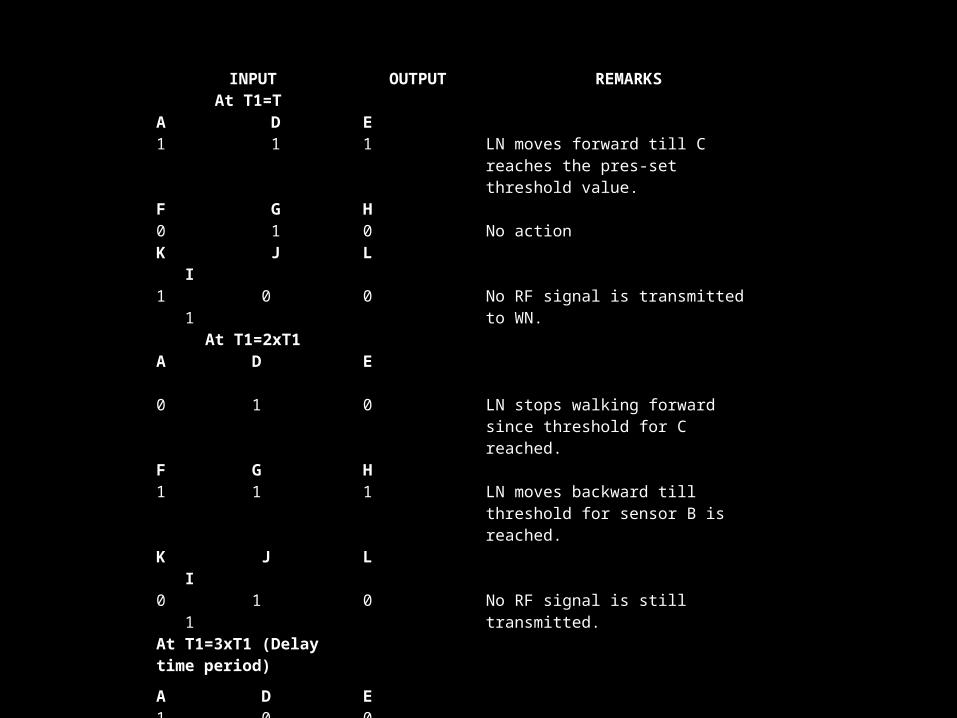
INPUT OUTPUT REMARKSAt T1=T
A D E1 1 1 LN moves forward till C reaches the pres-
set threshold value.
F G H0 1 0 No actionK J I L1 0 1 0 No RF signal is transmitted to WN.
At T1=2xT1A D E0 1 0 LN stops walking forward since threshold
for C reached.F G H1 1 1 LN moves backward till threshold for sensor
B is reached.
K J I L0 1 1 0 No RF signal is still transmitted.
At T1=3xT1 (Delay time period)
A D E1 0 0G F H0 1 0 LN stops moving backward because
threshold for sensor B is reached.
K J I L1 1 1 1 RF signal transmitted for 4ns.
WORKER NANOROBOT:
They have simultaneously working Attractant and E-Cadherin specific chemo-tactic sensors on their surface This arrangement ensures that the nanorobot even if separated from the swarm at any point of time, performs its function of drug delivery to the target site and later on finds its way back to the swarm with the help of attractant concentrations. A nanoshell filled with Target specific drug, enclosed by DNA based shutters on nanopore For Adherence, small gripping structure can be incorporated Larger size Only RF receiving antenna
FUTUREWith a little modification in the GATE switching and the sensors used, this algorithm can be applied in case of other Target specific problems such as: Artery blockage Repairing tissues
If in case Attractant reservoir of any nanorobot, especially LN is exhausted, it can lead to collapse of entire swarm system. Hence, a system can be developed and incorporated in nanorobot that modifies a biological molecule that is present in blood in abundance to generate an attractant. This attractant molecule, after a particular time span, tends to convert back to its original form by losing the modification caused by the nanorobot, and hence, losing its attractant tendency. Such a system can further reduce size of a nanorobot and the risk of any kind of biohazard caused due to presence of any foreign molecule as attractant in the body.
CONCLUSIONApart from switching of sensors, there is not much complexity in design of this swarm system. Comparatively less amount of energy is required in this system as only small part of swarm is engaged in exploration. Since all the nanorobots obtain their sense of direction either from attractants, that lead to swarm, or E-Cadherin, that lead to target site, tendency of any nanorobot to get lost is minimized. Trail following can cause the traffic to move in a line. At no point of time, such a movement can cause artery blockage or accumulation of nanorobots at a place that might increase their concentration in blood plasma above a significant level. Complete exploration can be expected of this system with faster results and adaptability. No nanorobot is dependent on another for its functioning and at the same time, all the nanorobots together collaborate to perform their task.
REFE
REN
CES
1. Ghada Al-Hudhud , ”On Swarming Medical Nanorobots” , International Journal of Bio-Science and Bio-Technology Vol. 4, No. 1, March, 2012
2. Dervis Karaboga , Bahriye Akay, “A comparative study of Artificial Bee Colony algorithm”, Applied Mathematics and Computation 214 (2009) 108–132
3. Dervis Karaboga and Celal Ozturk, “Fuzzy clustering with artificial bee colony algorithm”, Scientific Research and Essays Vol. 5(14), pp. 1899-1902, 18 July, 2010
4. Pinfa Boonrong, Boonserm Kaewkamnerdpong, “Canonical PSO based Nanorobot Control for Blood Vessel Repair” , World Academy of Science, Engineering and Technology 58 2011
5. Nada M. A. Al Salami, “Ant Colony Optimization Algorithm”, UbiCC Journal, Volume 4, Number 3, August 2009
6. Vittorio Maniezzo, Luca Maria Gambardella, Fabio de Luigi, “Ant Colony Optimization”, Future & Emerging Technologies unit of the European Commission through Project BISON (IST-2001-38923).
7. Micael S. Couceiro, Nuno M. F. Ferreira and Rui Rocha , “Multi-Robot Exploration based on Swarm Optimization Algorithms”, ENOC 2011, 24-29 July 2011, Rome, Italy
8. Khin Haymar Saw Hla, YoungSik Choi and Jong Sou Park, “Obstacle Avoidance Algorithm for Collective Movement in Nanorobots”, IJCSNS International Journal of Computer Science and Network Security, VOL.8 No.11, November 2008
REFE
REN
CES
9. Mohammadjavad Abbasi, Muhammad Shafie Abd Latiff, “Mobility Control to Improve Nanosensor Network Lifetime based on Particle Swarm Optimization” , International Journal of Computer Applications (0975 – 8887) Volume 30– No.4, September 2011
10. Simon Garnier · Jacques Gautrais · Guy Theraulaz, “The biological principles of swarm intelligence”, Swarm Intell (2007) 1: 3–31, DOI 10.1007/s11721-007-0004-y
11. Sanchita Paul, Dipti, “Nan robots: Survey on Recent Developments in Medical Application”, International Journal of Advanced Research in Computer Science and Software Engineering, Volume 2, Issue 4, April 2012
12. Nantapat, T. ; Kaewkamnerdpong, B. ; Achalakul, T. ; Sirinaovakul, B. , “ Best so Far ABC Based Nanorobot Swarm”, Intelligent Human Machine System and Cybernetics (IHMSC), 2011, Page 226-229, DOI: 10,1109/IHMSC.2011.61
13. Chandrasekaran, S. ; Hougen, D. F. , “Swarm Intelligence For Cooperation of Bio-Nanorobots using Quorum Sensing”, Bio Micro and Nanosystems Conference, 2006, BMN’06, page 104, DOI 10.1109/BMN.2006.330912
14. Tag Hogg, Adriono Cavalcanti, Bijan Shirinzadeh, Hwee C.Liaw, “Nanorobot Communication Technique: A Comprehensive Tutorial”, IEEE ICARCV, 2006, International Conference on Control, Automation, Robotics and Vision.
15. N N Sharma, R K Mittal, “Nanorobot Movement: Challenges and Biologically Inspired Solutions”, International Journal on Smart Sensing and Intelligent Systems, Vol. 1, No 1, March 2008.
16. Robert A.Freitas Jr, Christopher A.Phoenix, “Vasculoid: A Personal Nanomedicine Appliance to Replace Human Blood”, Journal of Evolution and Technology, Vol. 11, 2002
17. Robert A.Freitas Jr, “Current Status of Nanomedicine and Medical Nanorobotics”, Journal of Computational and Theoretical Nanoscience, Vol. 2, 1-25, 2005.